Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (16): 331621.doi: 10.7527/S1000-6893.2025.31621
• Electronics and Electrical Engineering and Control • Previous Articles
Dan CHEN1( ), Cheng TANG1, Yu XIE1, Yuanyuan MA2, Tianshu XU1
), Cheng TANG1, Yu XIE1, Yuanyuan MA2, Tianshu XU1
Received:2024-12-06
Revised:2024-12-26
Accepted:2025-03-28
Online:2025-04-17
Published:2025-04-17
Contact:
Dan CHEN
E-mail:chendan@njit.edu.cn
Supported by:CLC Number:
Dan CHEN, Cheng TANG, Yu XIE, Yuanyuan MA, Tianshu XU. Real time dual layer path planning of unmanned aerial vehicles for urban low altitude logistics distribution[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331621.
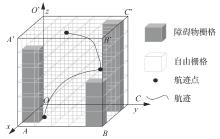
Fig.1
Schematic diagram of static environment modeling
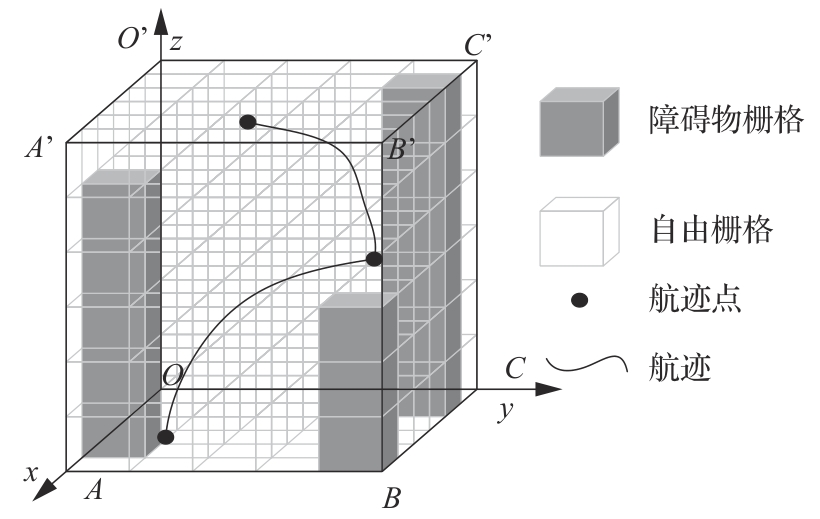
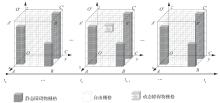
Fig.2
Schematic diagram of dynamic environment modeling
Fig.3
Schematic diagram of gridded flight path
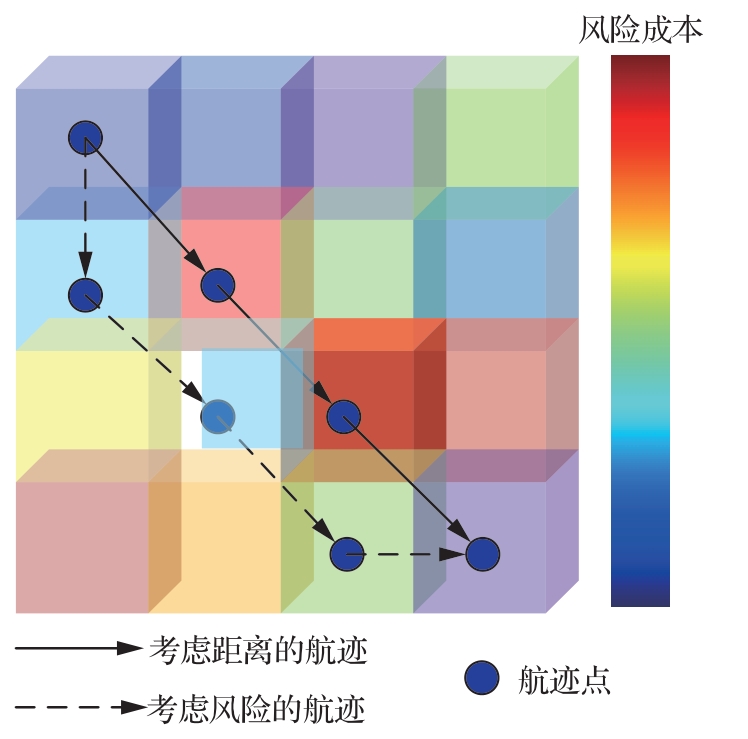
Fig.4
Schematic diagram of the interaction of the double-layer track planning model
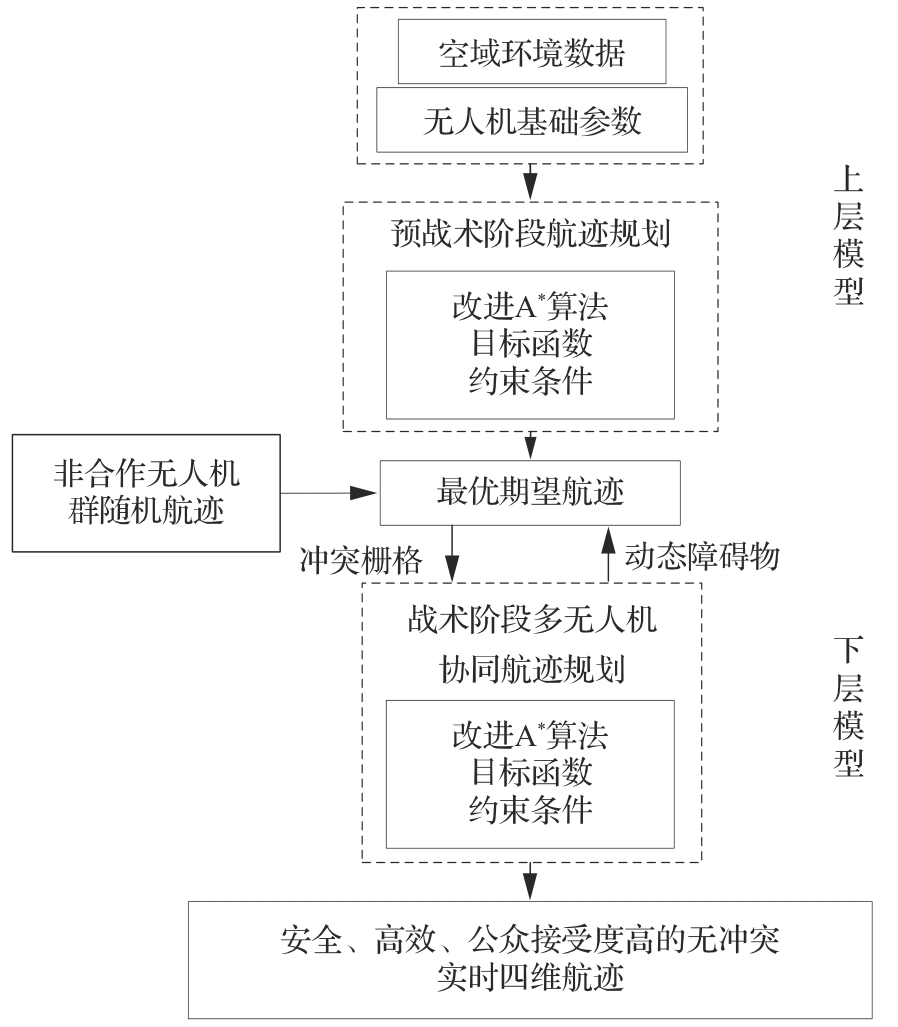

Fig.5
Schematic diagram of trajectory conflict and conflict resolution
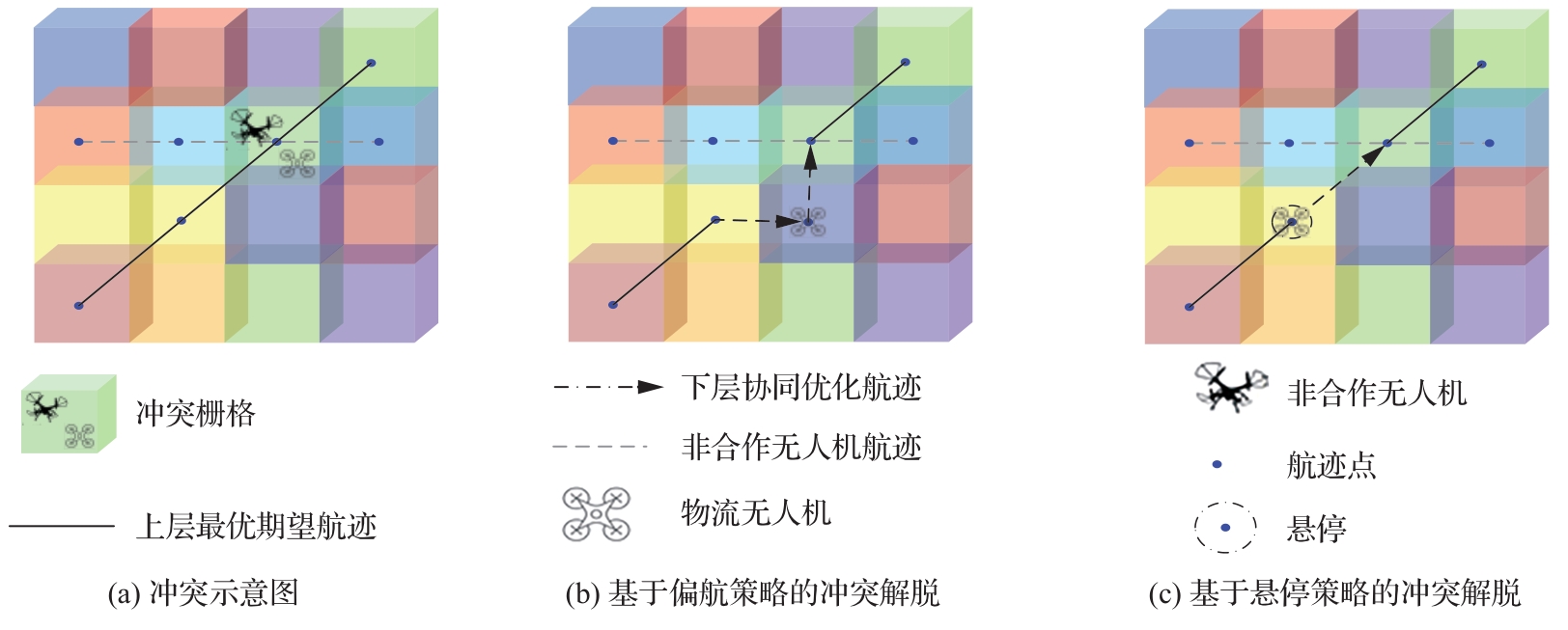
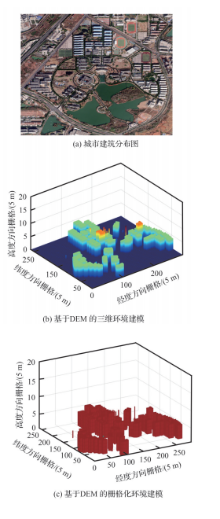
Fig.6
Static environment modeling
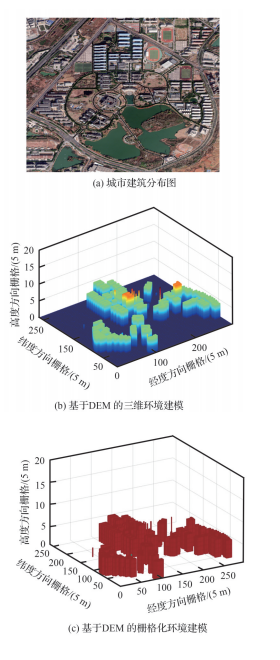
Table 1
Parameter Settings
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 最大航程 | 5 000 | 最大俯仰角 | |
| 最大转弯角 | 栅格大小 | 5 | |
最大飞行高度 | 120 | 最小飞行高度 | 1 |
| 无人机空重m/kg | 1.38 | ||
| 0.018 8 | 0.5 | ||
| 20 | 6 | ||
| 4 | 110 |
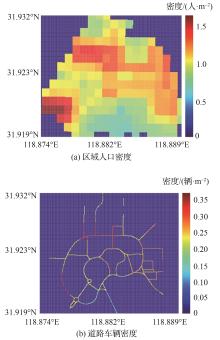
Fig.7
Density plot
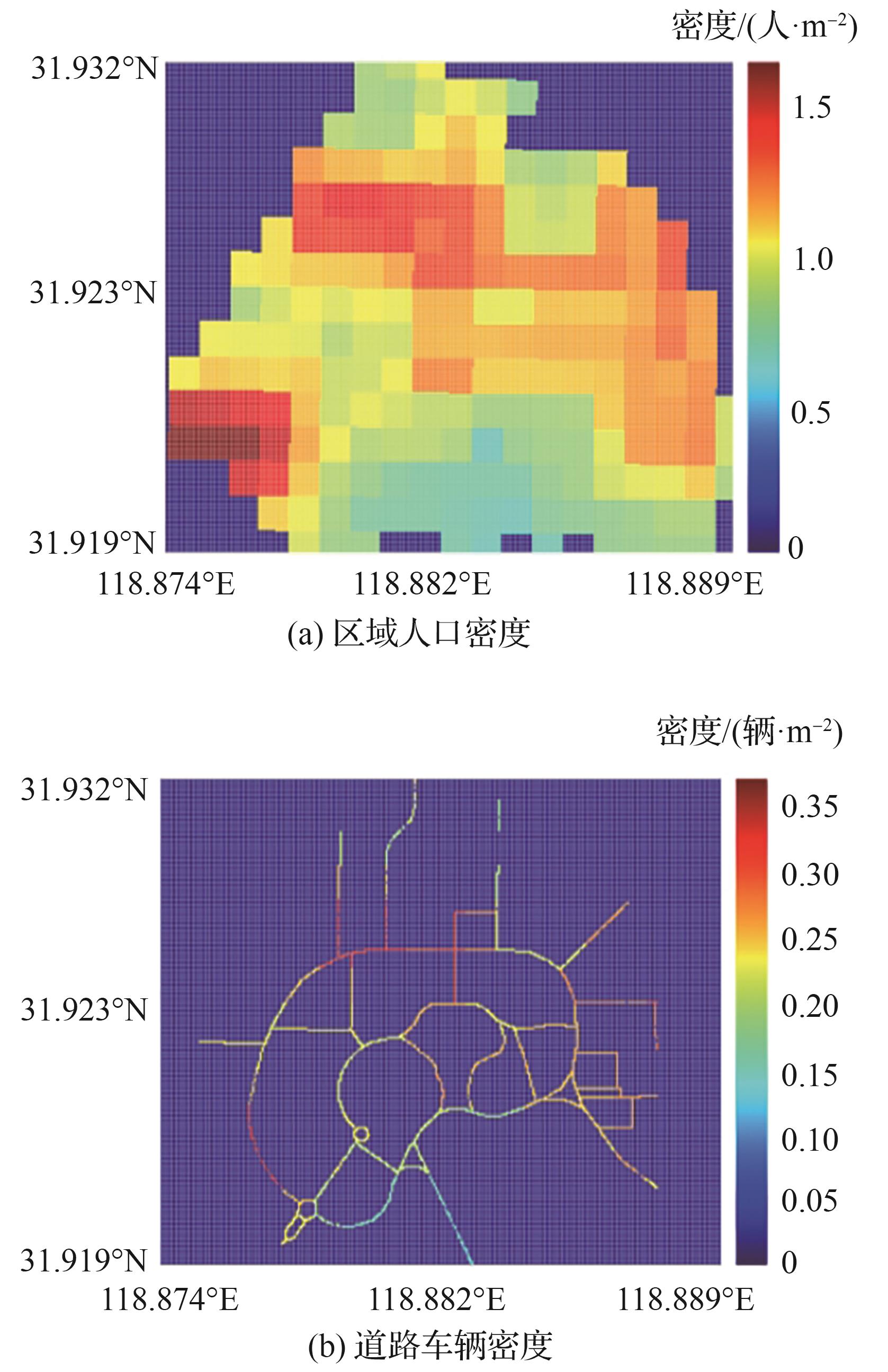

Fig.8
First layer security risk map
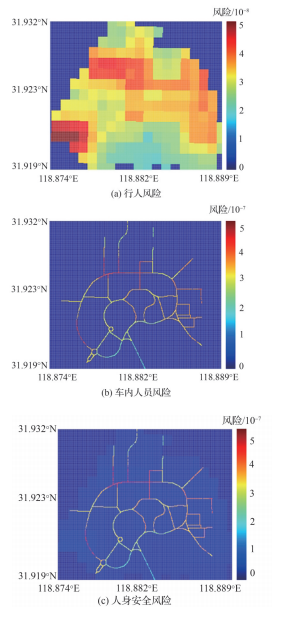
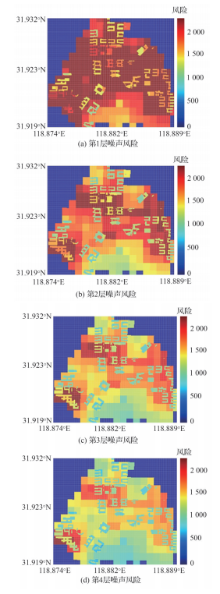
Fig.9
Noise Risk Map
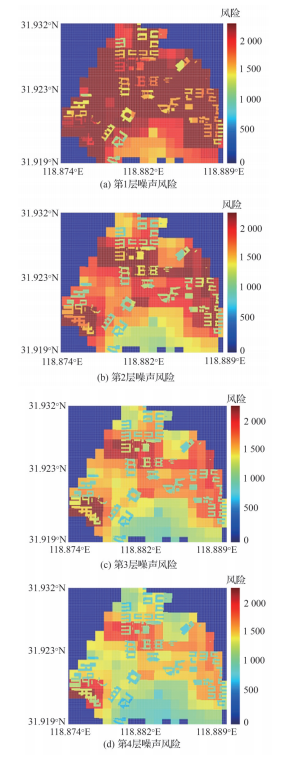
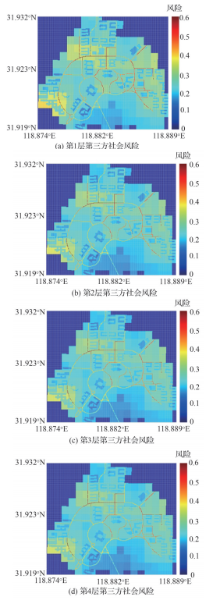
Fig.10
Third Party Social Risk Map
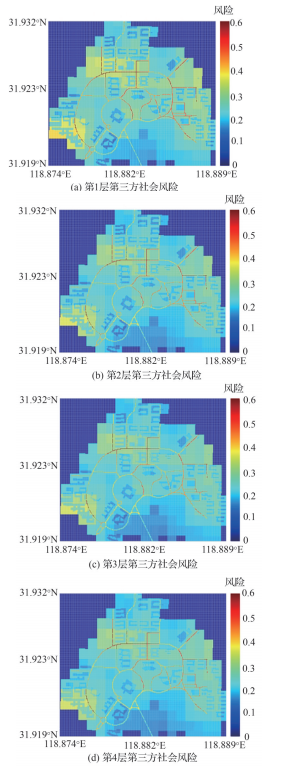

Fig.11
Results of TPFD
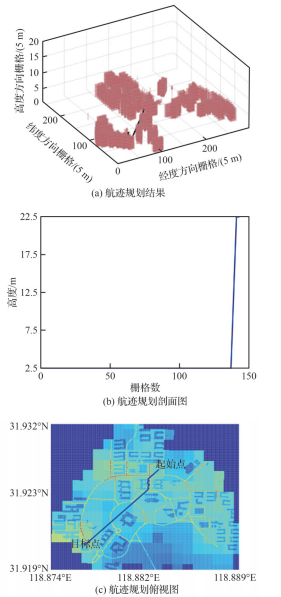
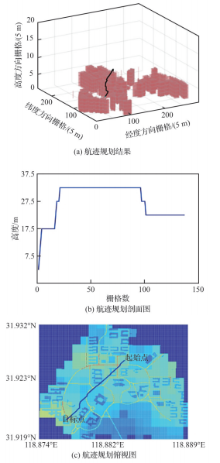
Fig.12
Results of TPRC
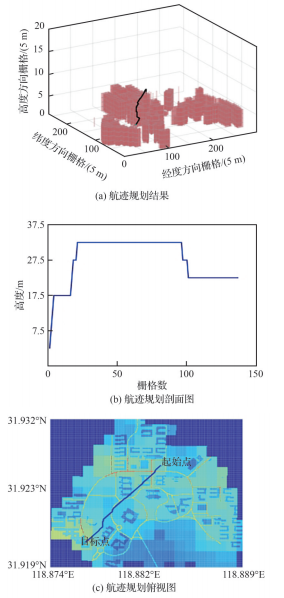
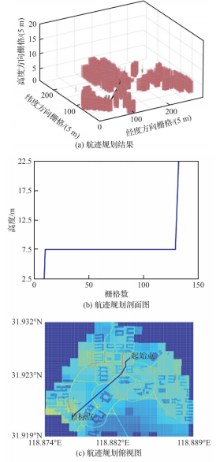
Fig.13
Results of TPCC
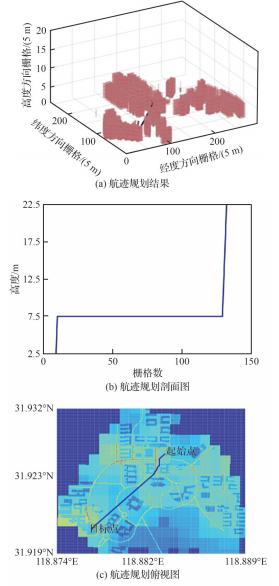
Table 2
Comparative analysis results between models
| 模型 | 航迹规划结果 | 与TPCC对比 | ||||||
|---|---|---|---|---|---|---|---|---|
| 风险代价 | 时间代价/s | 航行距离/m | 占用栅格数 | 风险代价/% | 时间代价/% | 航行距离/% | 占用栅格数/% | |
| TPFD | 279.03 | 52.34 | 966.81 | 143 | -15.12 | 0.52 | -4.84 | -4.9 |
| TPRC | 230.63 | 58.85 | 928.82 | 137 | 2.69 | -10.61 | -0.95 | -0.73 |
| TPECN | 258.08 | 52.90 | 919.53 | 136 | -8.22 | -0.54 | 0.05 | 0 |
| TPEC | 264.77 | 53.32 | 927.81 | 136 | -10.55 | -1.33 | -0.84 | 0 |
| Dijkstra | 241.16 | 53.93 | 959.05 | 149 | -1.79 | -2.45 | -4.07 | -8.72 |
| TPCC | 236.85 | 52.61 | 920.01 | 136 | 0 | 0 | 0 | 0 |
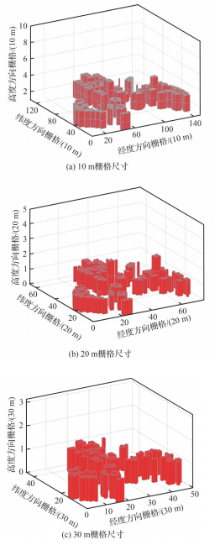
Fig.14
Modeling rasterized environments at different resolutions
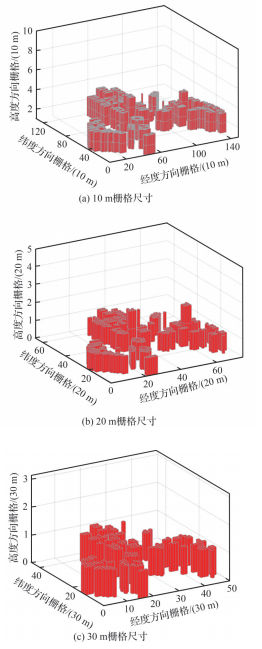
Table 3
Comparative analysis results of trajectory planning between different resolutions
| 栅格尺寸/m | 风险代价 | 代价对比/% | 时间代价/s | 代价对比/% | 航行距离/m | 距离对比/% |
|---|---|---|---|---|---|---|
| 5 | 236.85 | 0 | 52.61 | 0 | 920.01 | 0 |
| 10 | 253.30 | 6.95 | 54.14 | 2.90 | 956.85 | 4.00 |
| 20 | 303.88 | 28.30 | 54.60 | 3.79 | 953.46 | 3.63 |
| 30 | 322.37 | 36.11 | 55.67 | 5.81 | 943.68 | 2.57 |
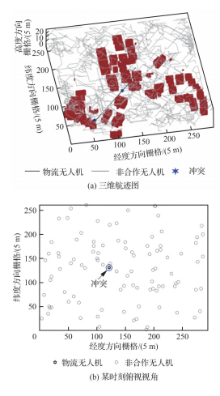
Fig.15
Aircraft conflict diagram in low altitude fusion operating environment
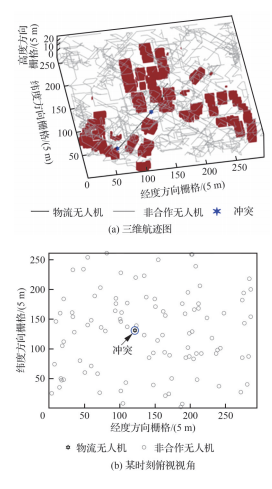
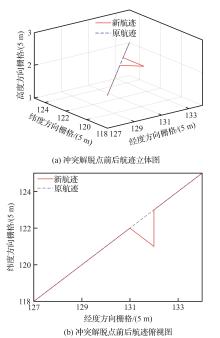
Fig.16
Conflict relief effect diagram

Table 4
Comparison and analysis results of optimal trajectories before and after conflict resolution
| 分析指标 | TPCC | LLOT | 对比 |
|---|---|---|---|
| 风险代价 | 236.85 | 239.34 | 2.49 |
| 时间代价/s | 52.62 | 53.11 | 0.49 |
| 航行距离/m | 920.01 | 930.01 | 10 |
| 占用栅格数/个 | 136 | 138 | 2 |
| 冲突栅格数/个 | 2 | 0 | -2 |
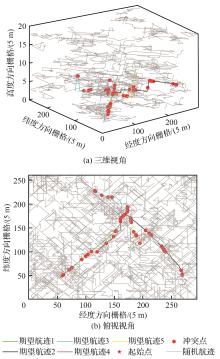
Fig.17
Real time 4D route network conflict diagram
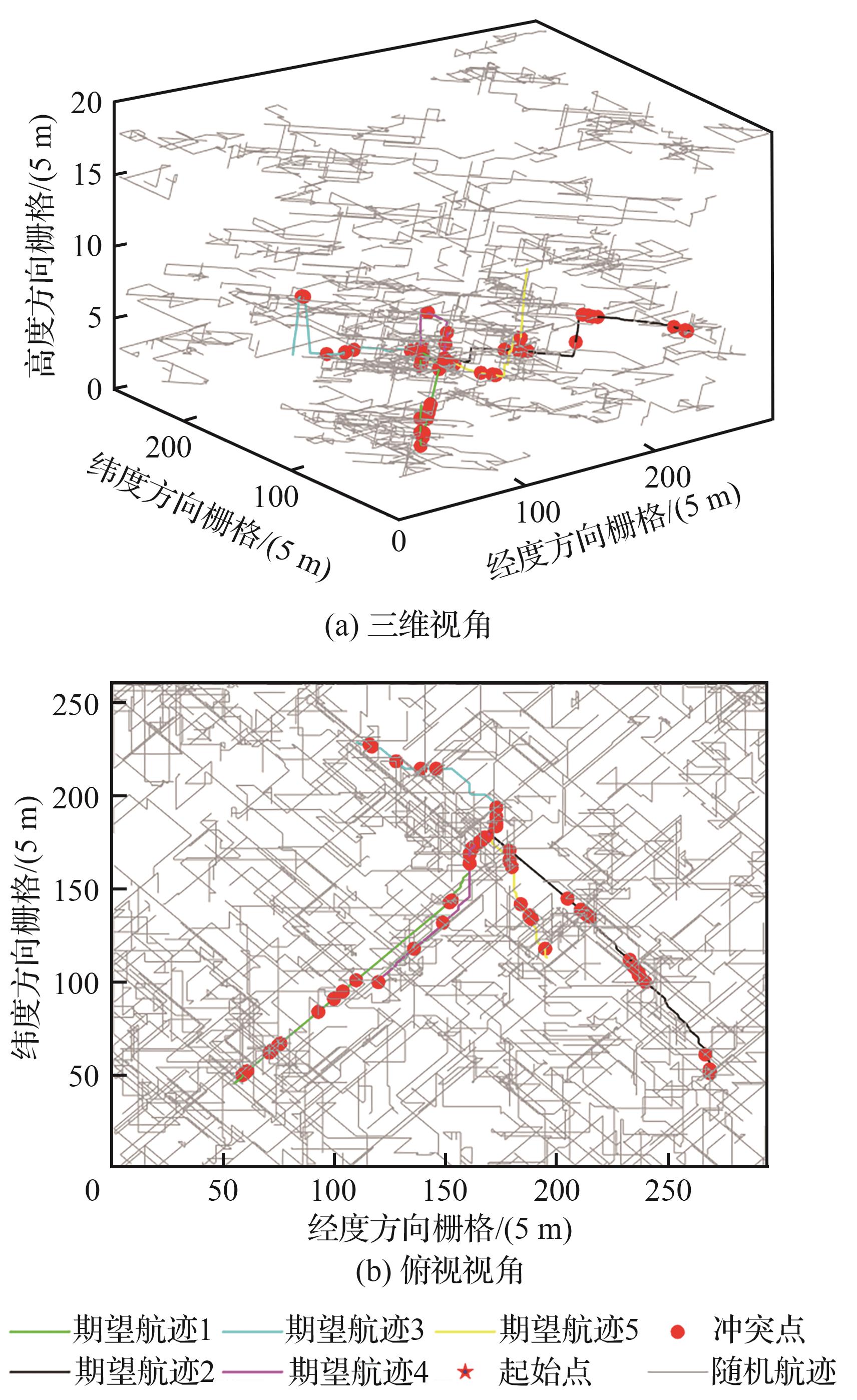
Table 5
Real time conflict resolution results of four-dimensional route
| 模型 | 航迹规划结果 | 与LLOT对比 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 风险代价 | 时间代价/s | 航行距离/m | 占用栅 格数/个 | 冲突栅 格数/个 | 风险代 价/% | 时间代 价/% | 航行距 离/% | 占用栅格 数/% | 冲突栅格数/% | |
| TPFD | 9 928.41 | 1 959.40 | 35 188.05 | 5 230 | 70 | -17.78 | 4.14 | -7.12 | -2.89 | -100 |
| TPRC | 7 691.40 | 2 130.14 | 32 384.53 | 5 050 | 75 | 6.13 | -4.21 | 0.92 | 0.57 | -100 |
| TPCC | 8 150.82 | 2 016.70 | 31 986.08 | 5 010 | 60 | 0.15 | 1.18 | 2.17 | 1.38 | -100 |
| TPECN | 8 390.87 | 2 026.55 | 31 426.94 | 4 850 | 72 | -2.71 | 0.69 | 3.99 | 4.72 | -100 |
| TPEC | 8 471.33 | 2 034.59 | 31 042.27 | 4 770 | 55 | -3.64 | 0.29 | 5.28 | 6.48 | -100 |
| Dijkstra | 8 322.98 | 2 036.13 | 31 432.56 | 4 900 | 72 | -1.92 | 0.21 | 3.97 | 3.65 | -100 |
| LLOT | 8 163.15 | 2 040.48 | 32 680.92 | 5 079 | 0 | 0 | 0 | 0 | 0 | 0 |
| [1] | 中国民用航空局. 城市场景轻小型无人驾驶航空器物流航线划设规范: [S]. 北京: 中国民航出版社, 2022. |
| The Civil Aviation Administration of China. Route design specification of the light-small unmanned aircraft system for urban logistics: [S]. Beijing: China Civil Aviation Publishing House, 2022 (in Chinese). | |
| [2] | RAMANA M V, VARMA S A, KOTHARI M. Motion planning for a fixed-wing UAV in urban environments[J]. IFAC-PapersOnLine, 2016, 49(1): 419-424. |
| [3] | HAN B, QU T T, TONG X C, et al. Grid-optimized UAV indoor path planning algorithms in a complex environment[J]. International Journal of Applied Earth Observation and Geoinformation, 2022, 111: 102857. |
| [4] | MA Z Y, CHEN J. Adaptive path planning method for UAVs in complex environments[J]. International Journal of Applied Earth Observation and Geoinformation, 2022, 115: 103133. |
| [5] | 张启钱, 许卫卫, 张洪海, 等. 复杂低空物流无人机路径规划[J]. 北京航空航天大学学报, 2020, 46(7): 1275-1286. |
| ZHANG Q Q, XU W W, ZHANG H H, et al. Path planning for logistics UAV in complex low-altitude airspace[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(7): 1275-1286 (in Chinese). | |
| [6] | PRIMATESTA S, RIZZO A, LA COUR-HARBO A. Ground risk map for unmanned aircraft in urban environments[J]. Journal of Intelligent & Robotic Systems, 2020, 97(3): 489-509. |
| [7] | 张洪海, 李翰, 刘皞, 等. 城市区域物流无人机路径规划[J]. 交通运输系统工程与信息, 2020, 20(6): 22-29. |
| ZHANG H H, LI H, LIU H, et al. Path planning for logistics unmanned aerial vehicle in urban area[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(6): 22-29 (in Chinese). | |
| [8] | 曲欣宇, 叶博嘉, 王华中, 等. 基于风险地图的城市物流无人机路径规划研究[J]. 航空计算技术, 2024, 54(1): 87-91. |
| QU X Y, YE B J, WANG H Z, et al. Research on global path planning method for urban logistics UAV based on risk maps[J]. Aeronautical Computing Technique, 2024, 54(1): 87-91 (in Chinese). | |
| [9] | PRIMATESTA S, CUOMO L S, GUGLIERI G, et al. An innovative algorithm to estimate risk optimum path for unmanned aerial vehicles in urban environments[J]. Transportation Research Procedia, 2018, 35: 44-53. |
| [10] | 李俨, 王重, 齐延军, 等. 城市风场环境中的无人机快速航迹规划方法[J]. 航空学报, 2016, 37(3): 949-959. |
| LI Y, WANG Z, QI Y J, et al. A rapid trajectory planning algorithm for UAV in urban areas with wind fields[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(3): 949-959 (in Chinese). | |
| [11] | ROBERGE V, TARBOUCHI M, LABONTE G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J]. IEEE Transactions on Industrial Informatics, 2013, 9(1): 132-141. |
| [12] | PANG B Z, TAN Q Y, RA T, et al. A risk-based UAS traffic network model for adaptive urban airspace management[C]∥AIAA Aviation 2020 Forum. Reston: AIAA, 2020. |
| [13] | 冯国强, 赵晓林, 高关根, 等. 基于A*蚁群算法的无人机航路规划[J]. 飞行力学, 2018, 36(5): 49-52, 57. |
| FENG G Q, ZHAO X L, GAO G G, et al. Path planning of UAVs using A* ant colony algorithm[J]. Flight Dynamics, 2018, 36(5): 49-52, 57 (in Chinese). | |
| [14] | 赵帅. 低空空域下多无人机无冲突路径规划研究[D]. 南京: 南京航空航天大学, 2019. |
| ZHAO S. Research on conflict-free path planning of multi-UAV in low altitude airspace[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019 (in Chinese). | |
| [15] | WANG X L, HUANG C, CHEN F H. An improved particle swarm optimization algorithm for unmanned aerial vehicle route planning[J]. Journal of Physics: Conference Series, 2022, 2245(1): 012013. |
| [16] | 任天祥, 贺建良, 邹杰. 基于改进Theta*算法的直升机三维航路规划[J]. 电光与控制, 2022, 29(2): 45-48. |
| REN T X, HE J L, ZOU J. 3D route planning for helicopters based on improved Theta* algorithm[J]. Electronics Optics & Control, 2022, 29(2): 45-48 (in Chinese). | |
| [17] | 胡莘婷, 吴宇. 面向城市飞行安全的无人机离散型多路径规划方法[J]. 航空学报, 2021, 42(6): 324383. |
| HU X T, WU Y. Risk-based discrete multi-path planning method for UAVs in urban environments[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(6): 324383 (in Chinese). | |
| [18] | SWAIN S, KHILAR P M, SENAPATI B R. A reinforcement learning-based cluster routing scheme with dynamic path planning for mutli-UAV network[J]. Vehicular Communications, 2023, 41: 100605. |
| [19] | ZHANG N, ZHANG M C, LOW K H. 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace[J]. Transportation Research Part C: Emerging Technologies, 2021, 129: 103123. |
| [20] | CHEN P Z, PEI J A, LU W Q, et al. A deep reinforcement learning based method for real-time path planning and dynamic obstacle avoidance[J]. Neurocomputing, 2022, 497: 64-75. |
| [21] | LIU Y, ZHENG Z, QIN F Y, et al. A residual convolutional neural network based approach for real-time path planning[J]. Knowledge-Based Systems, 2022, 242: 108400. |
| [22] | ZHU H, CLARAMUNT F M, BRITO B, et al. Learning interaction-aware trajectory predictions for decentralized multi-robot motion planning in dynamic environments[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2256-2263. |
| [23] | RAJA G, ANBALAGAN S, GANAPATHISUBRAMANIYAN A, et al. Efficient and secured swarm pattern multi-UAV communication[J]. IEEE Transactions on Vehicular Technology, 2021, 70(7): 7050-7058. |
| [24] | PANG B Z, HU X T, DAI W, et al. UAV path optimization with an integrated cost assessment model considering third-party risks in metropolitan environments[J]. Reliability Engineering & System Safety, 2022, 222: 108399. |
| [25] | DALAMAGKIDIS K, VALAVANIS K P, PIEGL L A. On integrating unmanned aircraft systems into the national airspace system[M]. Berlin: Springer Press, 2009: 120-142. |
| [26] | 程彩霞. 无人机城市运营居民接受度研究[D]. 天津: 中国民航大学, 2021. |
| CHENG C X. Study on residents’acceptance of unmanned aerial vehicle operation in city[D]. Tianjin: Civil Aviation University of China, 2021 (in Chinese). | |
| [27] | 张洪海, 张连东, 刘皞, 等. 城市低空物流无人机航迹规划模型研究[J]. 交通运输系统工程与信息, 2022, 22(1): 256-264. |
| ZHANG H H, ZHANG L D, LIU H, et al. Track planning model for logistics unmanned aerial vehicle in urban low-altitude airspace[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(1): 256-264 (in Chinese). | |
| [28] | 杨寒雨, 赵晓永, 王磊. 数据归一化方法综述[J]. 计算机工程与应用, 2023, 59(3): 13-22. |
| YANG H Y, ZHAO X Y, WANG L. Review of data normalization methods[J]. Computer Engineering and Applications, 2023, 59(3): 13-22 (in Chinese). | |
| [29] | 周浪. 农村电商物流配送“配送车+无人机”路径优化研究[D]. 武汉: 武汉理工大学, 2017. |
| ZHOU L. Research on path optimization of “delivery Vehicle+UAV” in rural E-commerce logistics distribution[D]. Wuhan: Wuhan University of Technology, 2017 (in Chinese). | |
| [30] | 李翰. 城市区域物流无人机路径规划方法研究[D]. 南京: 南京航空航天大学, 2021. |
| LI H. Research on path planning method of urban regional logistics UAV[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021 (in Chinese). |
| [1] | Zhen XUE, Hanlin SHENG, Xin CHEN, Pengxuan WEI, Jiacheng LI, Qian CHEN. Global planning method for UAVs based on pruned visibility map [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 331279-331279. |
| [2] | Xinglong WANG, Youjie WANG. Safety interval evaluation for multi-aircraft eVTOL in urban low altitude [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330604-330604. |
| [3] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [4] | Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816. |
| [5] | Jiang ZHAO, Xuan ZHANG, Pei CHI, Yingxun WANG. Self⁃adaptive formation control and dynamic path planning for air⁃ground heterogeneous swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809-329809. |
| [6] | Cheng HE, Yuqi TONG, Xinglu XIA, Gang CHEN. Integrated optimization of energy management strategy and mission path for hybrid-electric VTOL UAVs in cargo transportation [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 229606-229606. |
| [7] | Yanheng GUO, Neng WAN, Qixin ZHUANG, Bo LIU, Xinxin LI, Dao WANG. Optimization method for five⁃axis on⁃machine measurement path based on error distribution graph [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 629261-629261. |
| [8] | Xuejian WANG, Yongming WEN, Xiaorong SHI, Ningning ZHANG, Jiexi LIU. Design of hybrid intelligent decision framework for multi⁃agent and multi⁃coupling tasks [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729770-729770. |
| [9] | Lianbo YU, Pinzhao CAO, Liang SHI, Jie LIAN, Dong WANG. An improved conflict⁃based search algorithm for multi⁃agent path planning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727648-727648. |
| [10] | Yong XU, Hongtao YAN, Tao JIA, Yue MA, Zehua DENG, Duoneng LIU. Aerial simulation docking technology of fixed-wing clustering UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 326539-326539. |
| [11] | Hua XIE, Fangzheng SU, Jianan YIN, Site HAN, Xinjue ZHANG. Network modeling and refined management of UAV flight conflicts in complex low altitude airspace [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 328226-328226. |
| [12] | Yougang XIAO, Xiangna MAN, Guohua WU, Qizhang LUO. Surveying and mapping path planning method for UAV-borne SAR considering terains [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328143-328143. |
| [13] | Quanyou YU, Zhizheng XU, Na DUAN, Mimi XU, Yi CHENG. Coverage operation path planning of UAV with endurance constraints based on improved ACO [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 327856-327856. |
| [14] | Hua GUO, Xiaohe GUO. Local path planning algorithm for UAV based on improved velocity obstacle method [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(11): 327586-327586. |
| [15] | ZHANG Honghong, GAN Xusheng, SUN Jingjuan, ZHAO Guhao, HAN Baohua. Analysis of low altitude UAV conflict resolution safety based on STPA-TOPAZ [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(7): 325354-325354. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341