Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (18): 328226-328226.doi: 10.7527/S1000-6893.2023.28226
• Electronics and Electrical Engineering and Control • Previous Articles
Hua XIE1, Fangzheng SU2, Jianan YIN2( ), Site HAN2, Xinjue ZHANG2
), Site HAN2, Xinjue ZHANG2
Received:2022-11-04
Revised:2022-12-29
Accepted:2023-02-16
Online:2023-02-26
Published:2023-02-24
Contact:
Jianan YIN
E-mail:j.yin@nuaa.edu.cn
Supported by:CLC Number:
Hua XIE, Fangzheng SU, Jianan YIN, Site HAN, Xinjue ZHANG. Network modeling and refined management of UAV flight conflicts in complex low altitude airspace[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 328226-328226.

Fig.1
Schematic of Minkowski difference set conversion
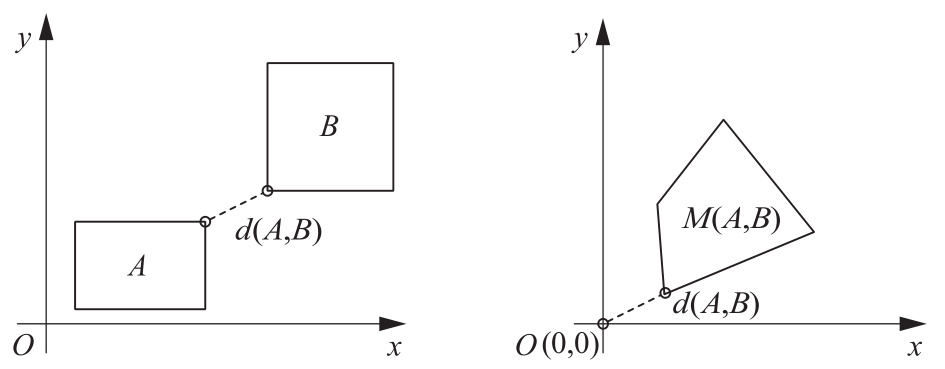
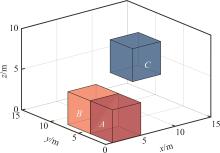
Fig.2
Cube representation of UAVs


Fig.3
Result of Minkowski difference set
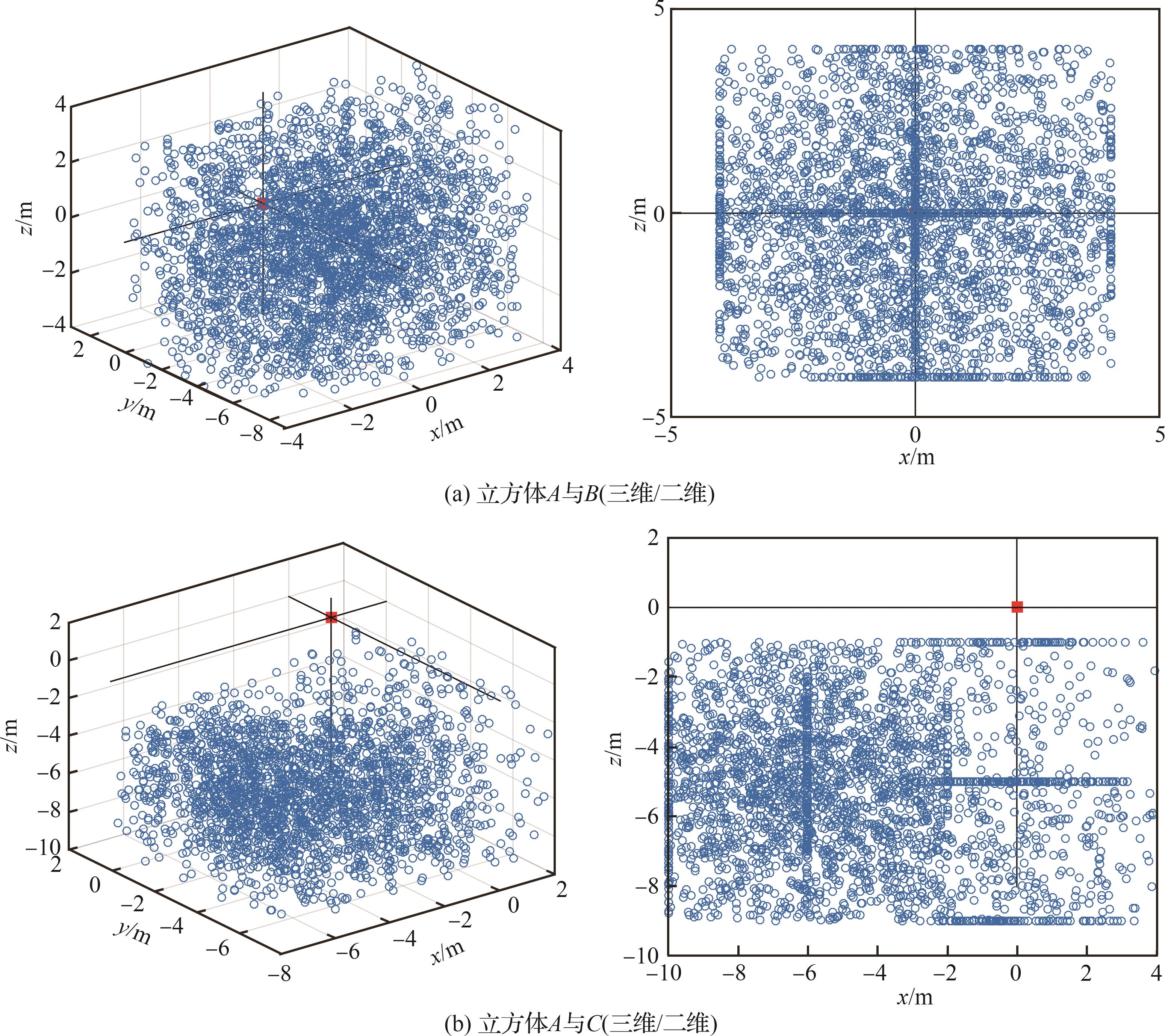
Fig.4
Trajectory of CSO at time [t0,t0+Δt]
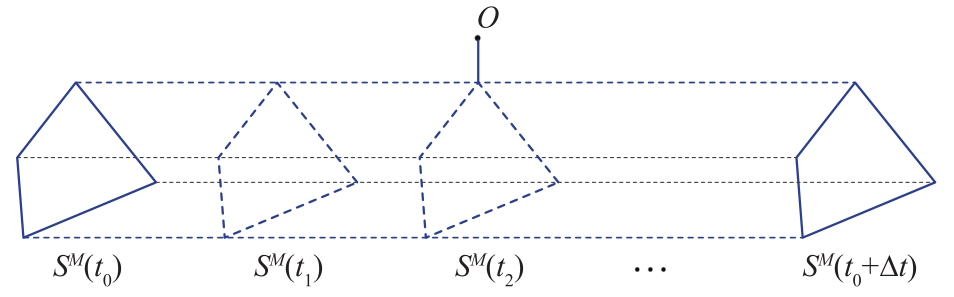

Fig.5
Conflict identification in two different scenarios
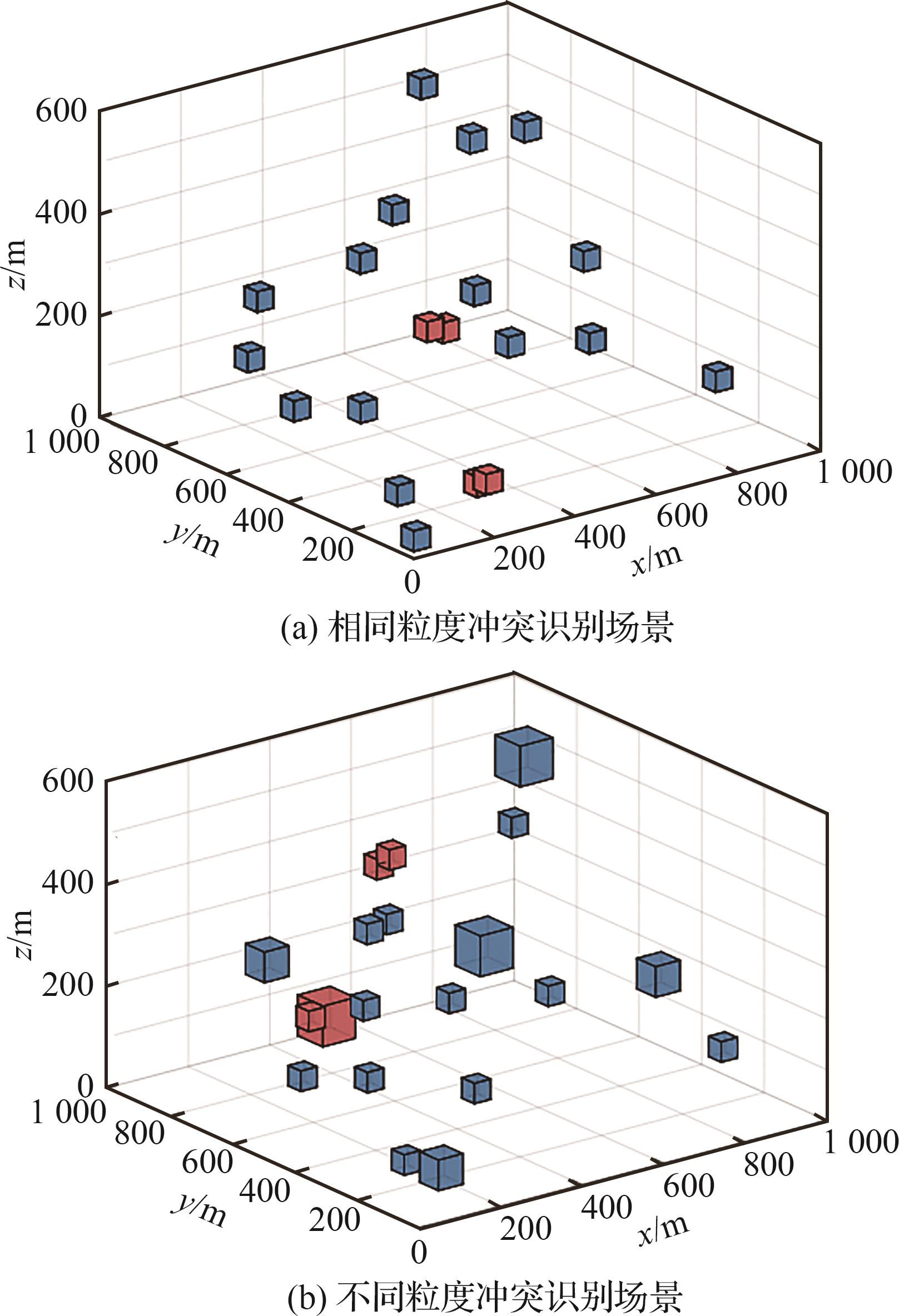
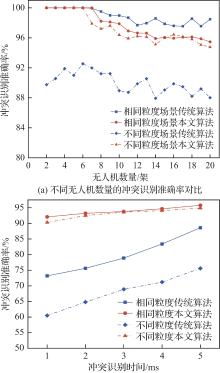
Fig.6
Comparison of conflict identification accuracy
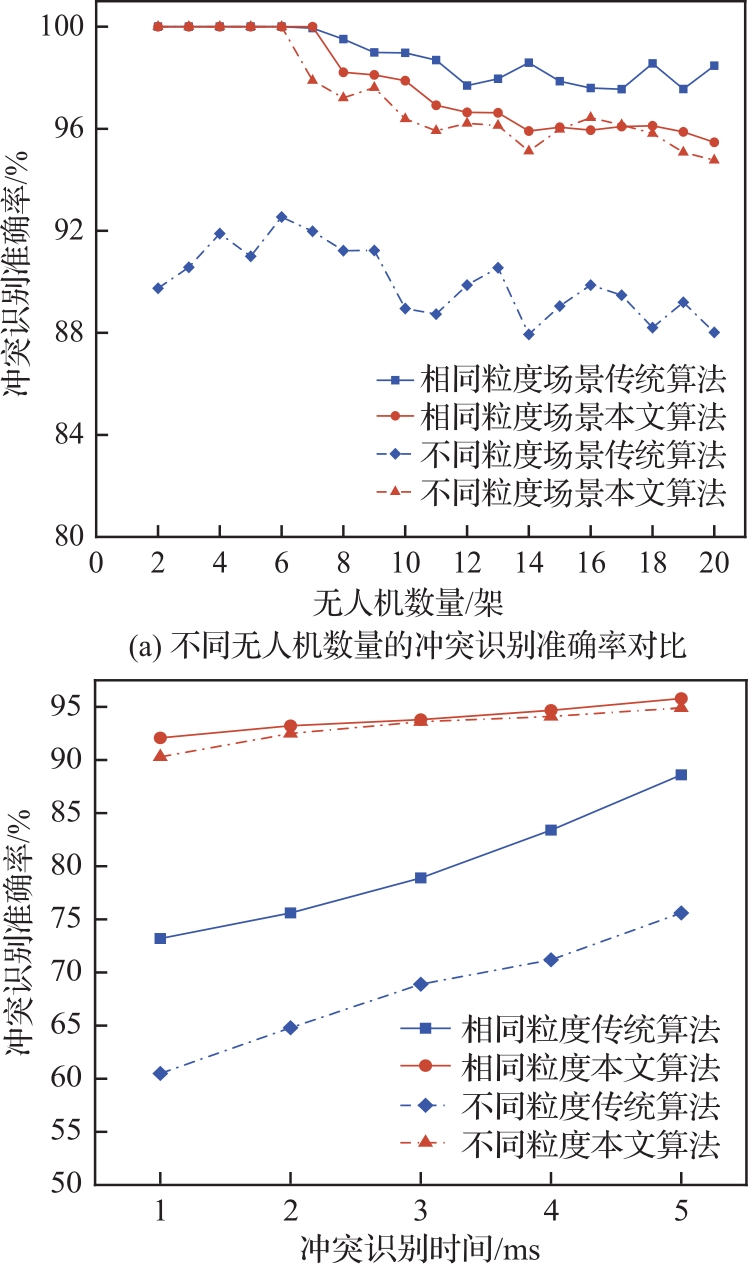
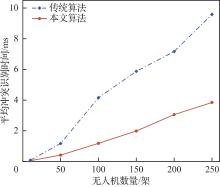
Fig.7
Comparison of conflict identification time


Fig.8
Evolution of UAV networks in airspace

Table 1
Characteristic indicators of network
| 演化次数 | 冲突数量 | 冲突风险等级 | 聚集系数 |
|---|---|---|---|
| 1 | 3.175 89 | 6.149 88 | 0.535 68 |
| 2 | 3.207 09 | 6.341 41 | 0.652 10 |
| ⋮ | ⋮ | ⋮ | ⋮ |
| 60 | 2.535 58 | 7.405 40 | 0.509 48 |
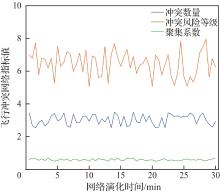
Fig.9
Evolution of flight conflict network characteristics


Fig.10
Grid splitting method
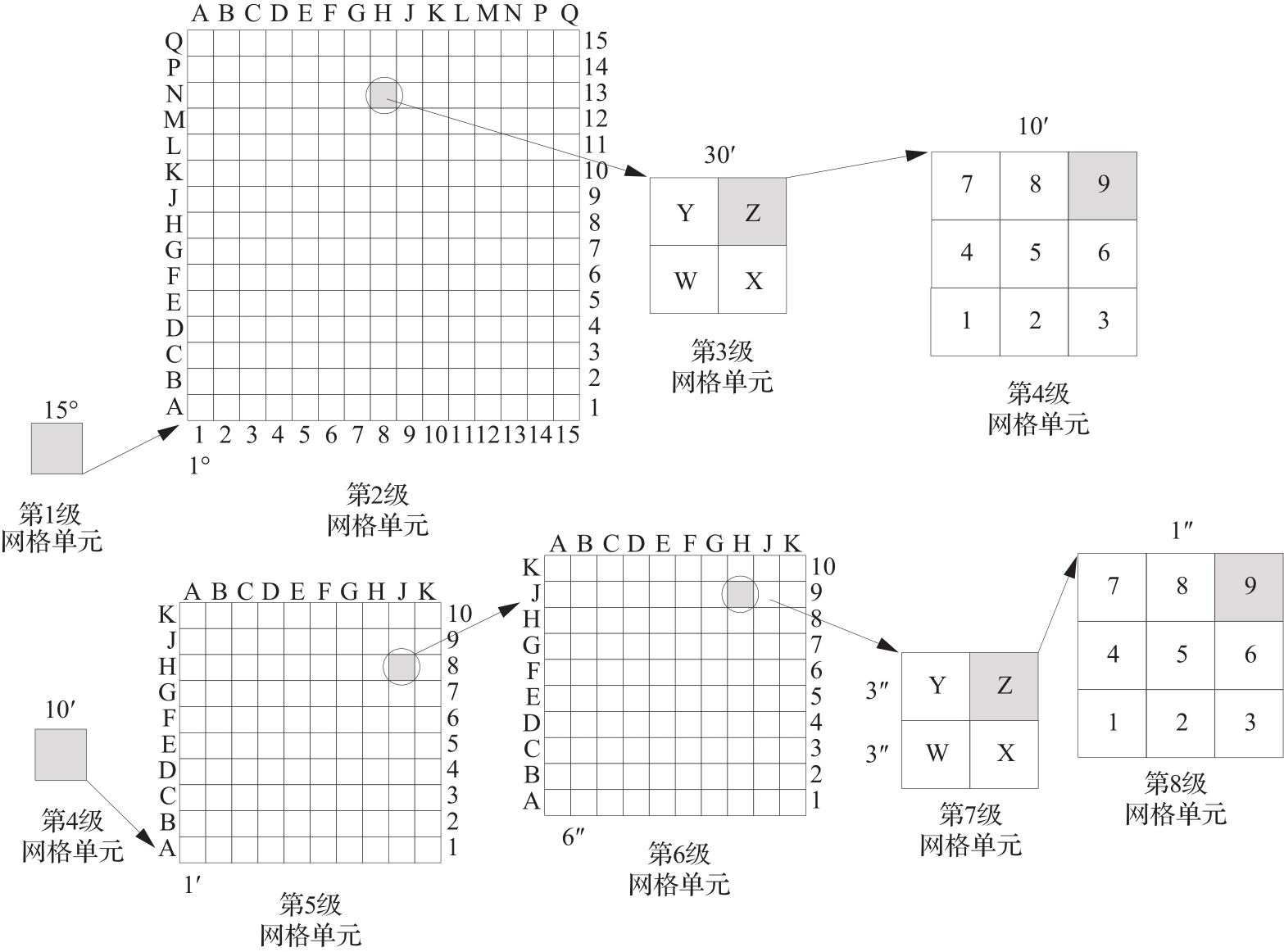
Table 2
Airspace grid classification hierarchy
| 剖分层级 | 栅格大小 | 赤道附近大致尺/km |
|---|---|---|
| 第1级 | 1 669 | |
| 第2级 | 111 | |
| 第3级 | 56 | |
| 第4级 | 9 | |
| 第5级 | 1 | |
| 第6级 | 0.2 | |
| 第7级 | 0.1 | |
| 第8级 | 0.03 |
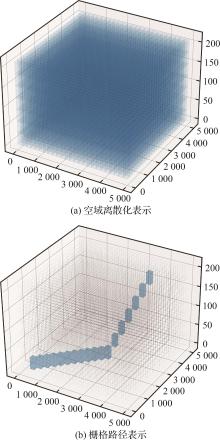
Fig. 11
Airspace gridding and path raster representation


Fig.12
Digital grid coding format in low altitude airspace


Fig. 13
Multi-level database table search strategy of low-altitude networks


Fig.14
Conflict detection efficiency of different methods

Fig.15
Conflict detection efficiency of different algorithms in fixed scenarios
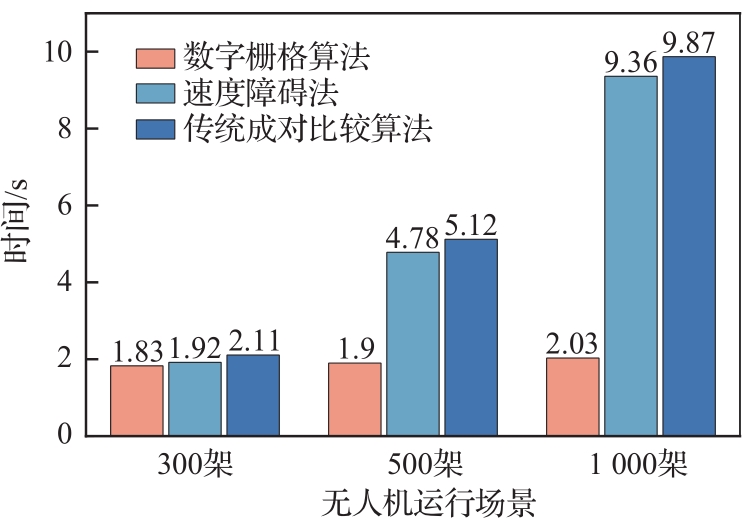

Fig.16
Trajectory generated by virtual waypoints at

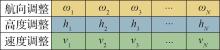
Fig.17
Diagram of chromosomal gene coding

Table 3
Parameter of UAVs conflict resolution model
| 参数 | 取值 |
|---|---|
| 离散时间步长 | 1 |
权重系数 最大允许航线长度扩展系数 | (0, 1] 0.25 |
| 允许设置的虚拟航路点数量 | 2 |
| 虚拟航路点自定义参数 | 0.125 |
| 虚拟航路点自定义参数 | 0.1 |
| 最大高度层改变量 | 5 |
| 最大飞行速度 | 30 |
| 最小飞行速度 | 1 |
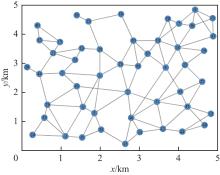
Fig.18
Network of UAVs operation
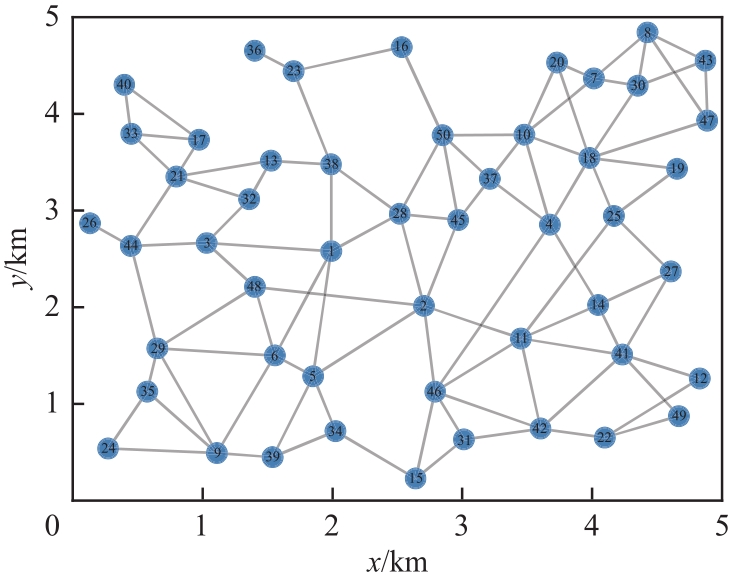

Fig.19
Non-dominated solutions resulting from different priority principles
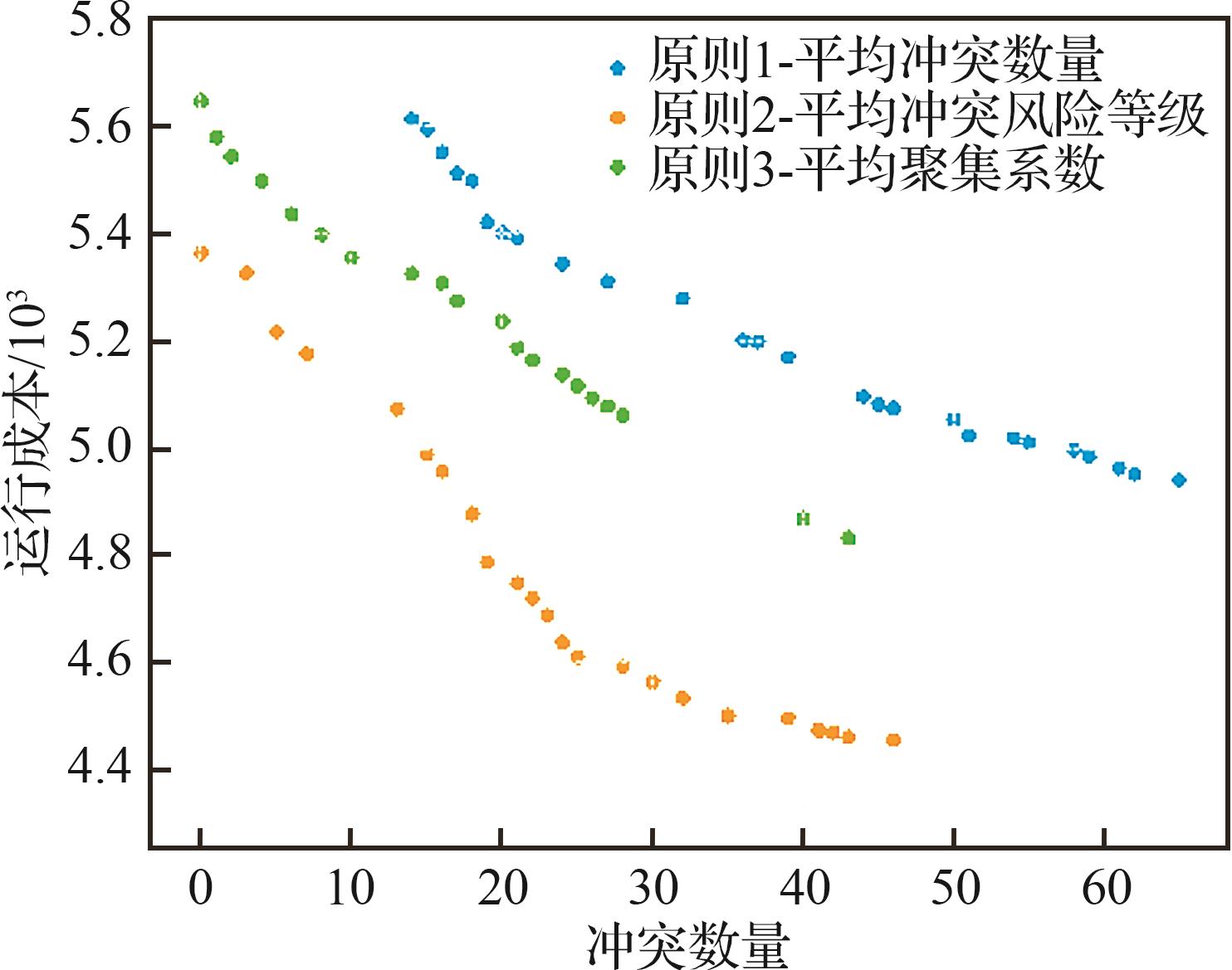

Fig.20
Conflict number and operation cost algorithm convergence changes with different priority principles

Table 4
Optimization results of NSGA-Ⅱ algorithm
| 指标 | 原则1 | 原则2 | 原则3 |
|---|---|---|---|
| 初始冲突数量 | 93 | 93 | 93 |
| 初始飞行成本 | 5 916 | 5 916 | 5 916 |
| 总运行成本最小的非支配解的冲突数量 | 65 | 46 | 43 |
| 总运行成本最小的非支配解的运行成本 | 4 940.5 | 4 455.7 | 4 832.6 |
| 总冲突数量最小的非支配解的冲突数量 | 14 | 0 | 0 |
| 总冲突数量最小的非支配解的运行成本 | 5 613.7 | 5 363.1 | 5 647.4 |
| 算法求解时间/s | 18.4 | 14.1 | 15.3 |

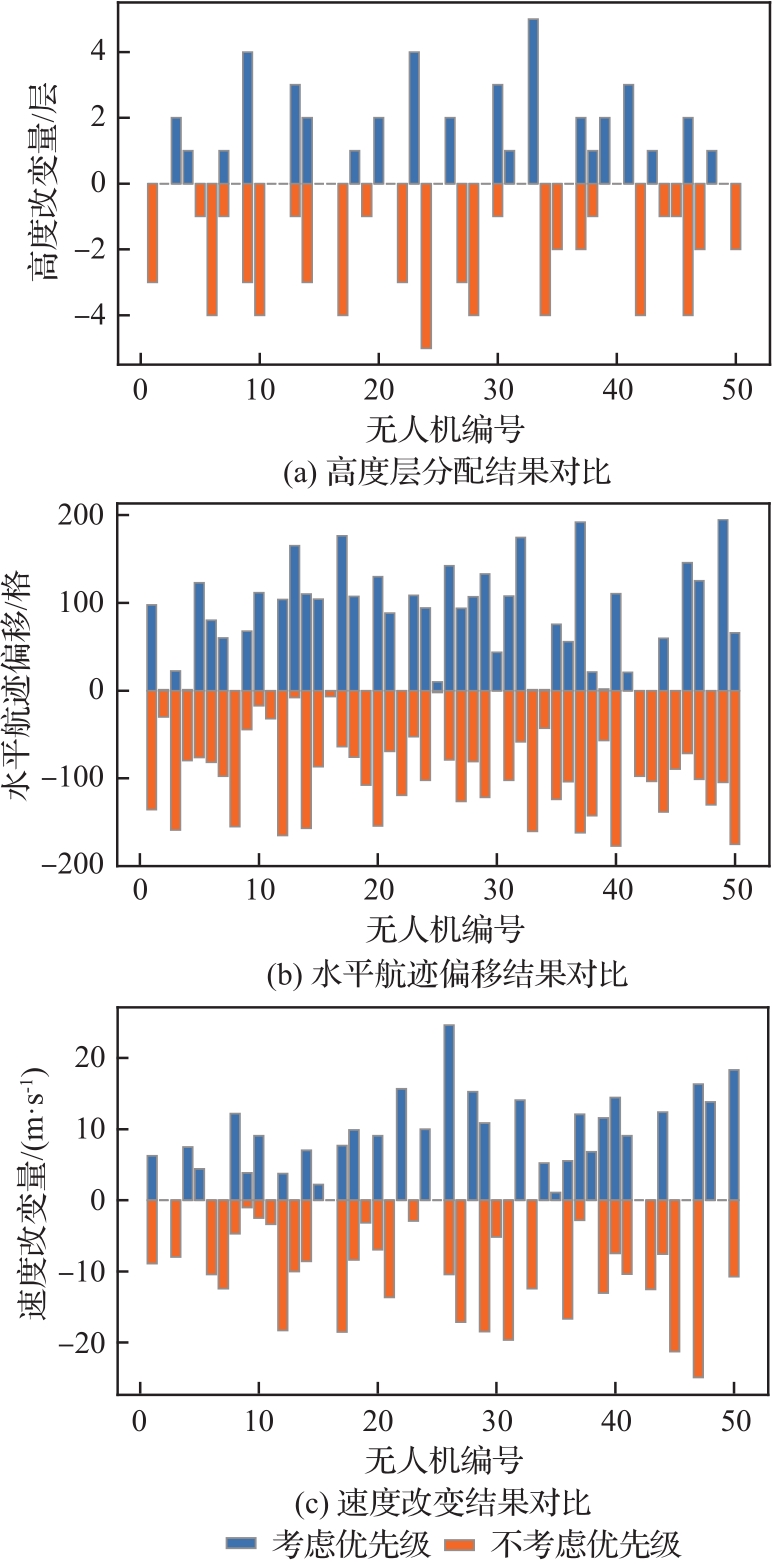
Fig.21
Cost comparison of priority and direct resolution
| 1 | XU C C, LIAO X H, TAN J M, et al. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude[J]. IEEE Access, 2020, 8: 74175-74194. |
| 2 | PATCHOU M, SLIWA B, WIETFELD C. Flying robots for safe and efficient parcel delivery within the COVID-19 pandemic[C]∥2021 IEEE International Systems Conference (SysCon). Piscataway: IEEE Press, 2021: 1-7. |
| 3 | 揭东, 汤新民, 李博, 等. 无人机冲突探测及解脱策略关键技术研究[J]. 武汉理工大学学报(交通科学与工程版), 2018, 42(5): 776-782. |
| JIE D, TANG X M, LI B, et al. Research on key technologies of UAV conflict detection and resolution strategy[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2018, 42(5):776-782 (in Chinese). | |
| 4 | WEINERT A, CAMPBELL S, VELA A, et al. Well-clear recommendation for small unmanned aircraft systems based on unmitigated collision risk[J]. Journal of Air Transportation, 2018, 26(3): 113-122. |
| 5 | MULLINS M, HOLMAN M, FOERSTER K, et al. Dynamic separation thresholds for a small air-borne sense and avoid system: AIAA-2013-5148 [R]. Boston: AIAA, 2013. |
| 6 | 张阳, 程先峰, 刘岩. 空中交通基于四维轨迹运行概念及其应用[J]. 指挥信息系统与技术, 2020, 11(5): 5-10. |
| ZHANG Y, CHENG X F, LIU Y. Operational concept and application of four-dimensional trajectory based operation in air traffic[J]. Command Information System and Technology, 2020, 11(5): 5-10 (in Chinese). | |
| 7 | 武晓光, 张军峰, 郑乐. 相关航空器的冲突探测与调度研究[J]. 武汉理工大学学报(交通科学与工程版), 2015, 39(1): 166-170. |
| WU X G, ZHANG J F, ZHENG Y. Research of conflict detection and scheduling for related aircraft[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2015, 39(1):166-170 (in Chinese). | |
| 8 | PONGSAKORNSATHIEN N, BIJJAHALLI S, GARDI A, et al. A performance-based airspace model for unmanned aircraft systems traffic management[J]. Aerospace, 2020, 7(11): 154. |
| 9 | ZHAI W X, TONG X C, MIAO S X, et al. Collision detection for UAVs based on GeoSOT-3D grids[J]. ISPRS International Journal of Geo-Information, 2019, 8(7): 299. |
| 10 | 顾俊伟. 基于多源数据融合的4D航迹规划技术研究[D]. 南京: 南京航空航天大学,2016: 34-50. |
| GU J W. Research on 4D route planning technology based on multi-source data fusion[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016: 34-50 (in Chinese). | |
| 11 | 谢华,苏方正,尹嘉男,等.低空无人机飞行冲突分类探测与差异解脱方法研究[J/OL].安全与环境学报, (2022-08-16)[2022-11-04]. . |
| XIE H, SU F Z, YIN J N, et al. Research on classified detection and differential resolution method for UAV flight conflicts in low altitude airspace [J/OL]. Journal of Safety and Environment, (2022-08-16)[2022-11-04]. (in Chinese). | |
| 12 | 付其喜, 梁晓龙, 张佳强, 等. 双层优化的多无人机合作式冲突探测与解脱[J]. 哈尔滨工业大学学报, 2020, 52(4): 74-83. |
| FU Q X, LIANG X L, ZHANG J Q, et al. Cooperative conflict detection and resolution for multiple UAVs using two-layer optimization[J]. Journal of Harbin Institute of Technology, 2020, 52(4): 74-83 (in Chinese). | |
| 13 | VIRÁGH C, NAGY M, GERSHENSON C, et al. Self-organized UAV traffic in realistic environments[C]∥ 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York: ACM, 2016: 1645-1652. |
| 14 | INNOCENTI M, GELOSI P, POLLINI L. Air traffic management using probability function fields:AIAA-1999-4149[R]. Reston: AIAA, 1999. |
| 15 | ALONSO-AYUSO A, ESCUDERO L F, MARTÍN-CAMPO F J. An exact multi-objective mixed integer nonlinear optimization approach for aircraft conflict resolution[J]. TOP, 2016, 24(2): 381-408. |
| 16 | TANG X M, JI X Q, LI T. Key technology in muti⁃UAV conflict detection and resolution strategy [J]. Transactions of Nanjing University of Aeronautics and Astronautics,2020,37(2): 175⁃186. |
| 17 | CECEN R K, SARAÇ T, CETEK C. Meta-heuristic algorithm for aircraft pre-tactical conflict resolution with altitude and heading angle change maneuvers[J]. TOP, 2021, 29(3): 629-647. |
| 18 | PANG B Z, LOW K H, LV C. Adaptive conflict resolution for multi-UAV 4D routes optimization using stochastic fractal search algorithm[J]. Transportation Research Part C: Emerging Technologies, 2022, 139: 103666. |
| 19 | 张宏宏, 甘旭升, 辛建霖, 等. 基于合作博弈的多机冲突解脱算法[J]. 北京航空航天大学学报, 2022, 48(5):863-871. |
| ZHANG H H, GAN X S, XIN J L, et al. Multi-aircraft conflict resolution algorithm based on cooperative game[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(5): 863-871 (in Chinese). | |
| 20 | 管祥民, 吕人力. 基于满意博弈论的复杂低空飞行冲突解脱方法[J]. 航空学报, 2017, 38(S1): 721475. |
| GUAN X M, LYU R L. Aircraft conflict resolution method based on satisfying game theory[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(S1): 721475 (in Chinese). | |
| 21 | VAN DEN BERGEN G. A fast and robust GJK implementation for collision detection of convex objects[J]. Journal of Graphics Tools, 1999, 4(2): 7-25. |
| 22 | BERNABEU E J. Continuous distance computation for motions with constant accelerations[C]∥2010 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2010: 4028-4034. |
| 23 | MATHEWS J H. Numerical methods for computer science, engineering, and mathematics[M]. Englewood Cliffs: Prentice-Hall, 1987: 103-121. |
| 24 | REICH P G. Analysis of long-range air traffic systems: Separation standards-Ⅲ[J]. Journal of Navigation, 1966, 19(3): 331-347. |
| 25 | 黄洋, 汤俊, 老松杨. 基于复杂网络的无人机飞行冲突解脱算法[J]. 航空学报, 2018, 39(12): 322222. |
| HUANG Y, TANG J, LAO S Y. UAV flight conflict resolution algorithm based on complex network[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(12): 322222 (in Chinese). | |
| 26 | 朱永文, 蒲钒. 空域空间网格标识原理及应用[J]. 北京航空航天大学学报, 2021, 47(12): 2462-2474. |
| ZHU Y W, PU F. Principle and application of airspace spatial grid identification[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2462-2474 (in Chinese). |
| [1] | Yi WANG, Hui YE, Xiaofei YANG. A position control and obstacle avoidance method for quadrotor via approach based on passivity and artificial potential filed [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727492-727492. |
| [2] | Hongfa WAN, Shanshan LI, Chaozhen LAN, Mingzhi XIANG. UAV visual positioning method based on factor graph [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727627-727627. |
| [3] | Chenyang LIU, Dawei WU, Yize GUO, Xinsai LV, Jiani ZHOU, Shuyi SHAO. Robust adaptive attitude control of quadrotor with uncertain strong coupling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645-727645. |
| [4] | Lianbo YU, Pinzhao CAO, Liang SHI, Jie LIAN, Dong WANG. An improved conflict⁃based search algorithm for multi⁃agent path planning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727648-727648. |
| [5] | Yajie MA, Juan WANG, Bin JIANG, Jianye GONG. A fault⁃tolerant control scheme for UAVs-UGVs formation systems [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327216-327216. |
| [6] | Xiaowei FU, Zhe XU, Jindong ZHU, Nan WANG. Maneuvering decision-making of multi-UAV attack-defence confrontation based on PER-MATD3 [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327083-327083. |
| [7] | Heye XIAO, Jianfeng YANG, Junqiang BAI, Xudong ZHANG, Lirong WU. Modular UAVs configuration method responded to task requirements [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327100-327100. |
| [8] | Zhiqiang FENG, Zhijun XIE, Zhengwei BAO, Kewei CHEN. Real⁃time dense small object detection algorithm for UAV based on improved YOLOv5 [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327106-327106. |
| [9] | Yong XU, Hongtao YAN, Tao JIA, Yue MA, Zehua DENG, Duoneng LIU. Aerial simulation docking technology of fixed-wing clustering UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 326539-326539. |
| [10] | Yubin YUAN, Yiquan WU, Langyue ZHAO, Jinlin CHEN, Qichang ZHAO. Research progress of UAV aerial video multi⁃object detection and tracking based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 28334-028334. |
| [11] | Bo LIU, Zhongjie MENG. Tanker/UAV formation tracking control with hose connection constraints [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328210-328210. |
| [12] | Yougang XIAO, Xiangna MAN, Guohua WU, Qizhang LUO. Surveying and mapping path planning method for UAV-borne SAR considering terains [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328143-328143. |
| [13] | Bing WANG, Runyuan ZOU, Zhening CHANG. Aircraft takeoff mass estimation method based on improved simulated annealing algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(16): 328090-328090. |
| [14] | Yafei LU, Qingyang CHEN, Peng WANG, Bo WANG, Zheng GUO. Design and experiment of a small air-launched UAV [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528642-528642. |
| [15] | Jingxuan YUE, Hongru WANG, Dongqin ZHU, Chupalov ALEKSANDR. UAV formation cooperative navigation algorithm based on improved particle filter [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 327995-327995. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341