Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (17): 328143-328143.doi: 10.7527/S1000-6893.2022.28143
• Electronics and Electrical Engineering and Control • Previous Articles
Yougang XIAO, Xiangna MAN, Guohua WU, Qizhang LUO( )
)
Received:2022-10-20
Revised:2022-12-03
Accepted:2023-01-18
Online:2023-02-13
Published:2023-02-13
Contact:
Qizhang LUO
E-mail:qz_luo@csu.edu.cn
Supported by:CLC Number:
Yougang XIAO, Xiangna MAN, Guohua WU, Qizhang LUO. Surveying and mapping path planning method for UAV-borne SAR considering terains[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328143-328143.
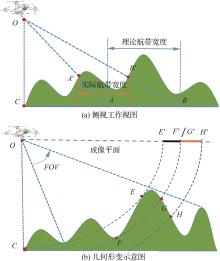
Fig.1
Issues caused by side-view imaging of UAV-borne SAR
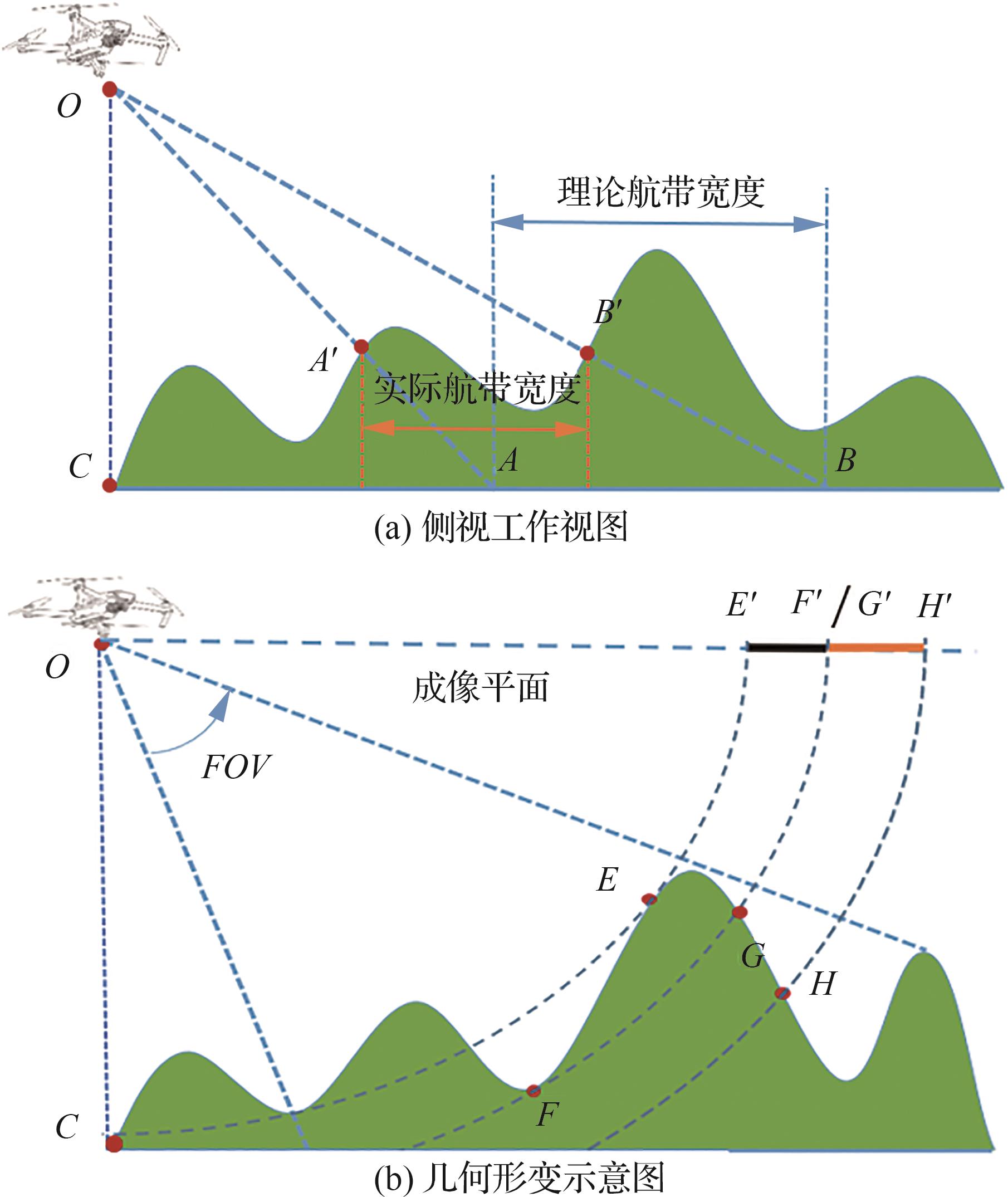

Fig.2
Framework of path planning method
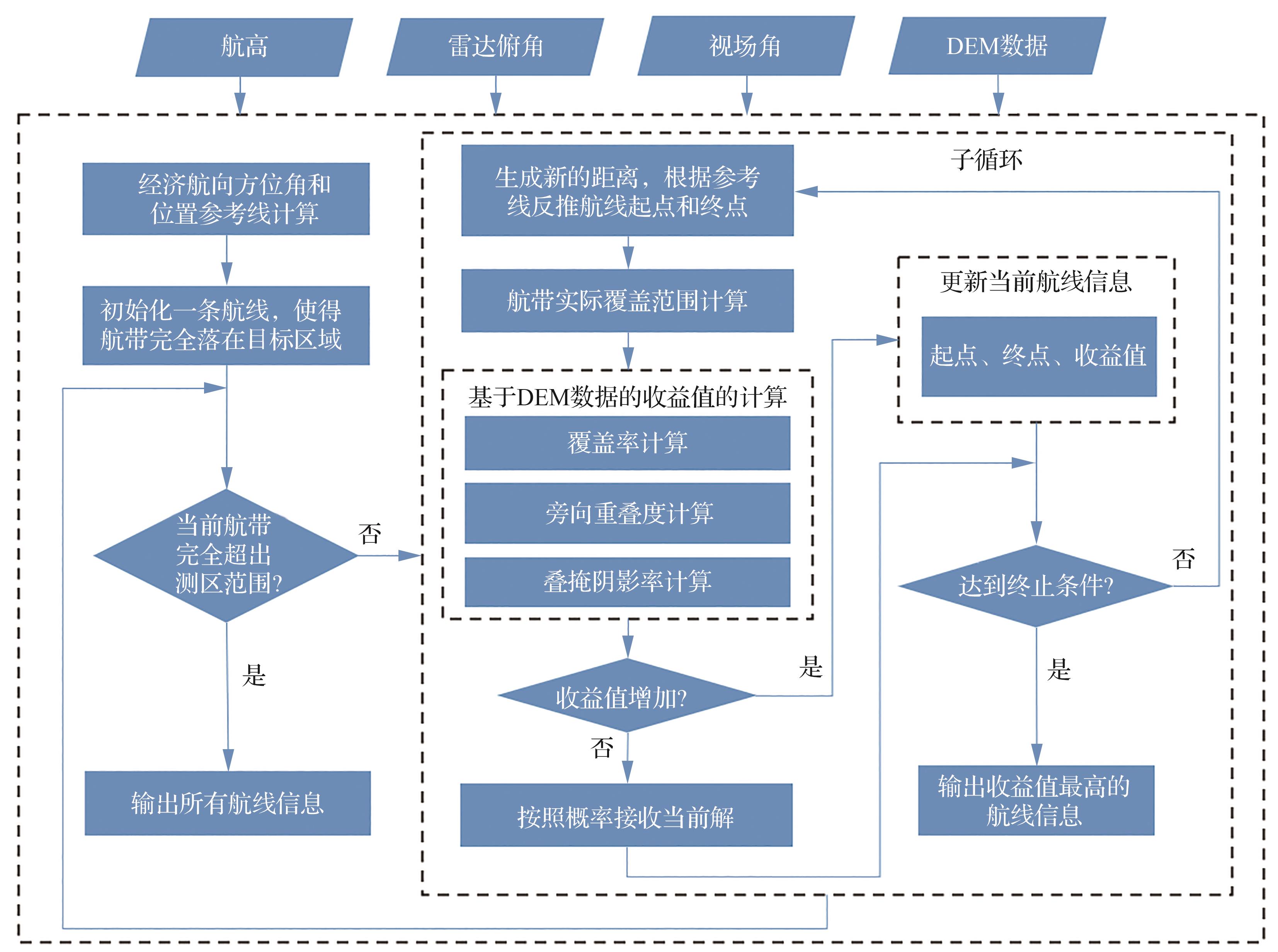

Fig.3
Actual coverage area
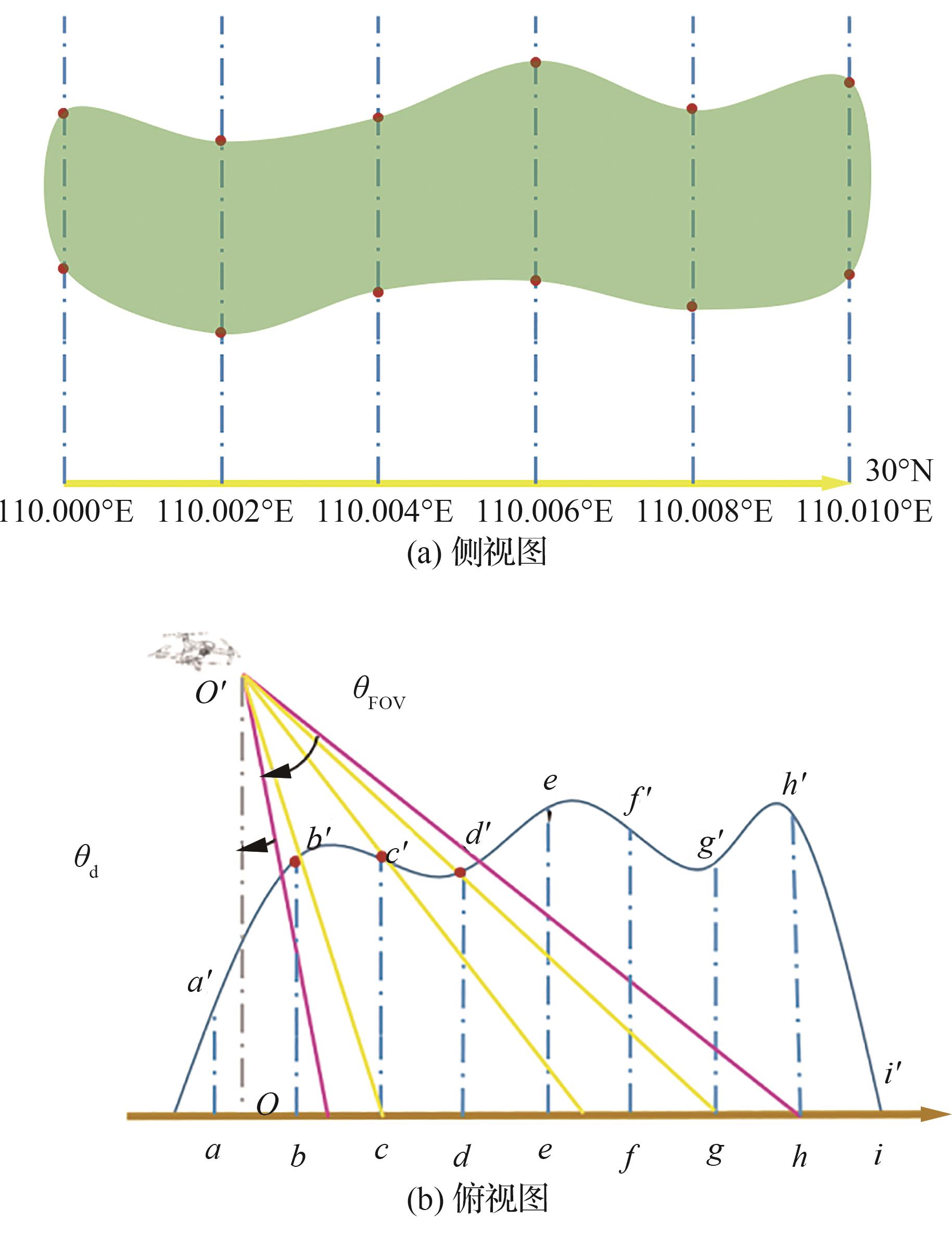
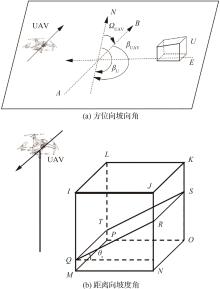
Fig.4
Slope aspect angle and slope angle
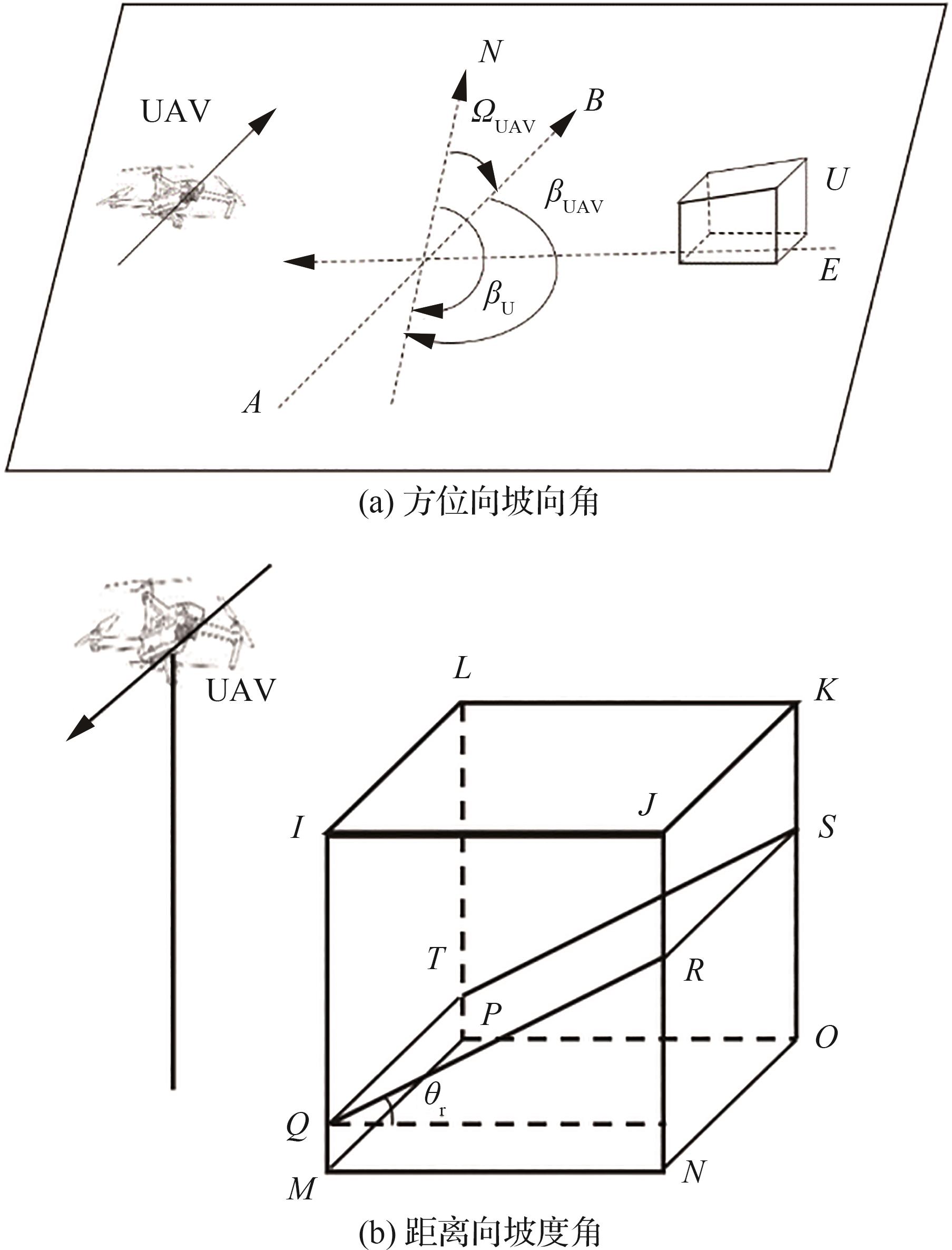
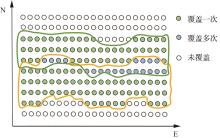
Fig.5
Illustration of earning rate of points
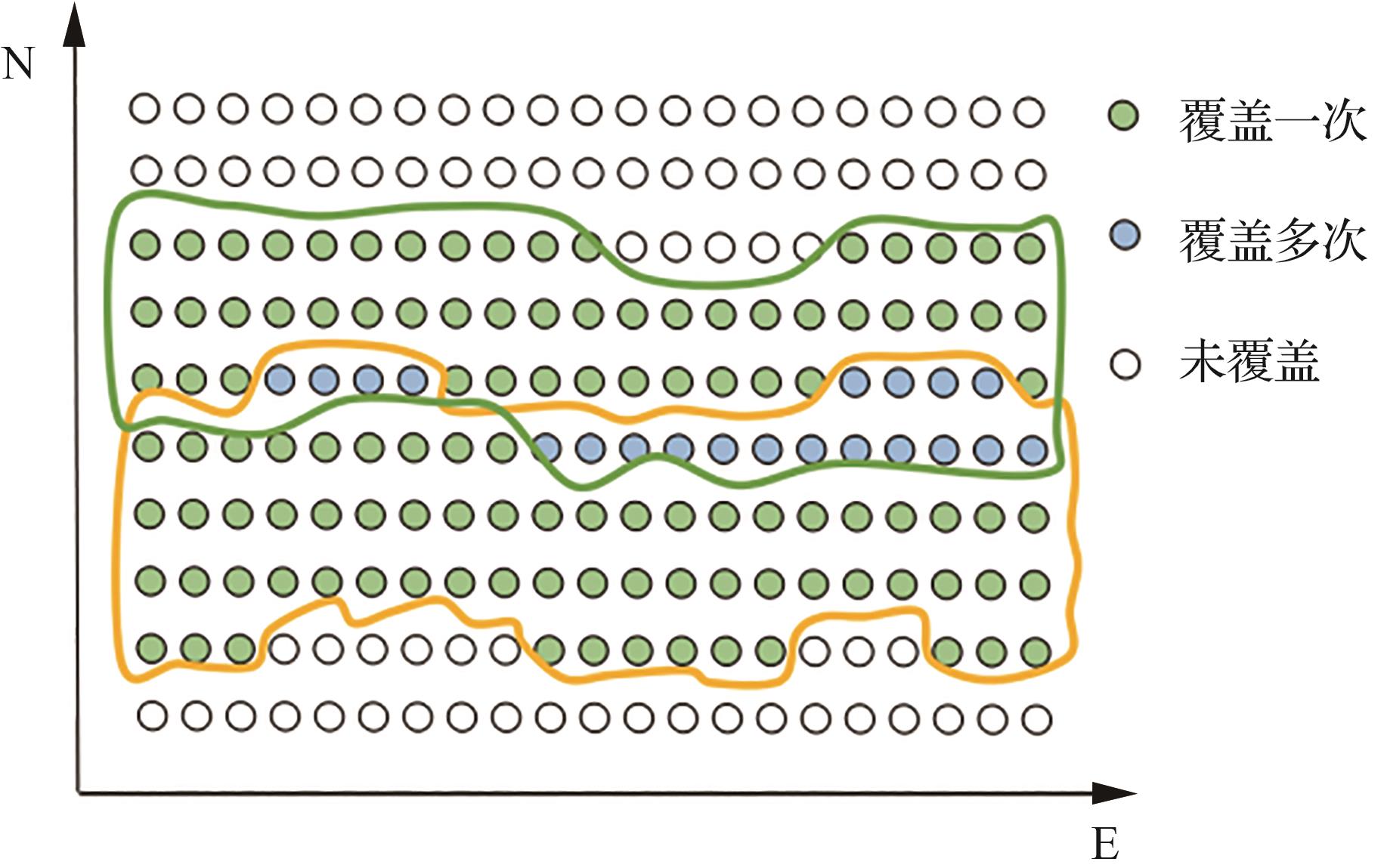
Table 1
Parameters of target areas
| 参数 | C1 | C2 | C3 | C4 |
|---|---|---|---|---|
| 平均高程/m | 1 335.67 | 15.53 | 1 299.99 | 1 505.22 |
| 高程标准差/m | 272.50 | 1.19 | 198.35 | 264.60 |
| 最小高程/m | 772.44 | 11.12 | 851.52 | 966.74 |
| 最大高程/m | 2 133.59 | 19.34 | 1 885.99 | 2 242.42 |
| 角点1/(°) | E109.752 N31.895 | E116.418 N 37.781 | E109.618 N31.896 | E109.752 N31.835 |
| 角点2/(°) | E109.752 N31.847 | E116.418 N37.772 | E109.618 N31.846 | E109.752 N31.789 |
| 角点3/(°) | E109.815 N31.847 | E116.430 N37.772 | E109.679 N31.846 | E109.815 N31.789 |
| 角点4/(°) | E109.815 N31.895 | E116.430 N37.781 | E109.679 N31.896 | E109.815 N31.835 |
| 投影面积/(km)2 | 31.51 | 1.05 | 31.54 | 30.57 |
Table 2
Path design parameters
| 参数 | C1 | C2 | C3 | C4 |
|---|---|---|---|---|
| 雷达俯角补角/(°) | 10 | 10 | 10 | 10 |
| 视场角/(°) | 20 | 40 | 20 | 20 |
| 飞行高度/m | 2 233.59 | 119.34 | 1 985.99 | 2 342.42 |
| 旁向重叠度/% | 30 | 30 | 30 | 30 |
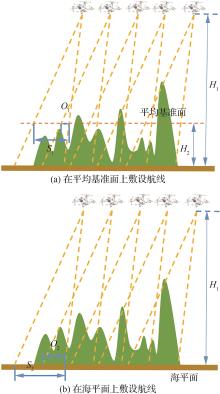
Fig.6
Paths on different datum levels
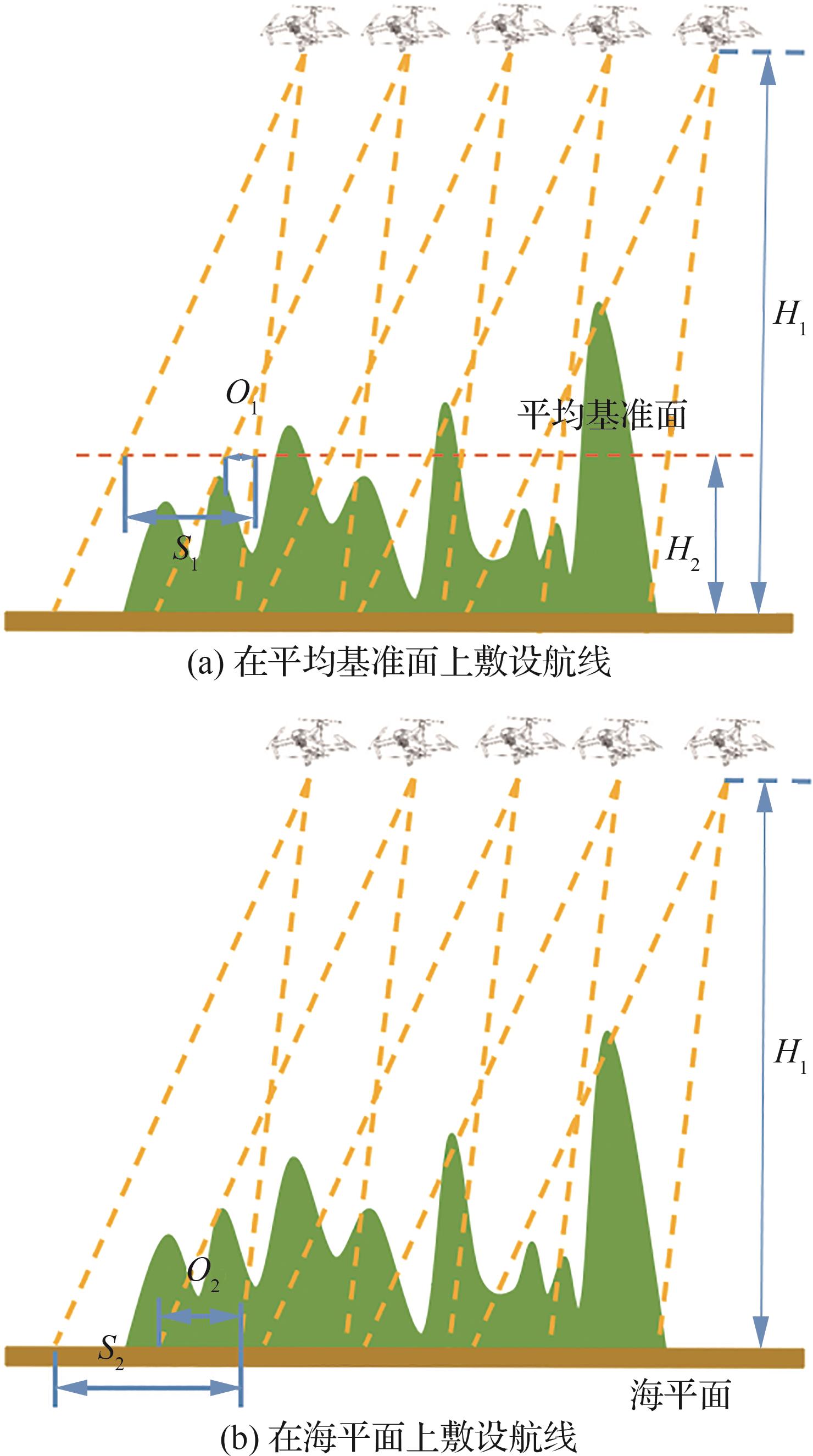
Table 3
Index results of three models in different test areas
| 模型 | 航线数量/条 | 覆盖率/% | |||||||
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | ||
| CPPM | 11.4 | 11.6 | 13 | 10.6 | 95.42 | 95.09 | 95.56 | 92.51 | |
| CPP1 | 17 | 13 | 23 | 17 | 94.81 | 90.58 | 96.72 | 94.64 | |
| CPP2 | 8 | 11 | 9 | 7 | 52.00 | 90.99 | 39.74 | 43.90 | |
| 模型 | 几何形变率/% | 旁向重叠度/% | |||||||
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | ||
| CPPM | 14.62 | 0.83 | 8.79 | 15.40 | 22.88 | 25.89 | 24.69 | 22.55 | |
| CPP1 | 6.96 | 0.04 | 3.28 | 11.90 | 29.88 | 10.60 | 33.14 | 36.03 | |
| CPP2 | 4.59 | 0.00 | 1.14 | 5.65 | 0 | 10.02 | 0.36 | 0 | |
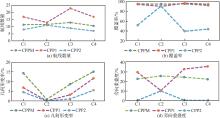
Fig.7
Average return values of three methods in different test areas
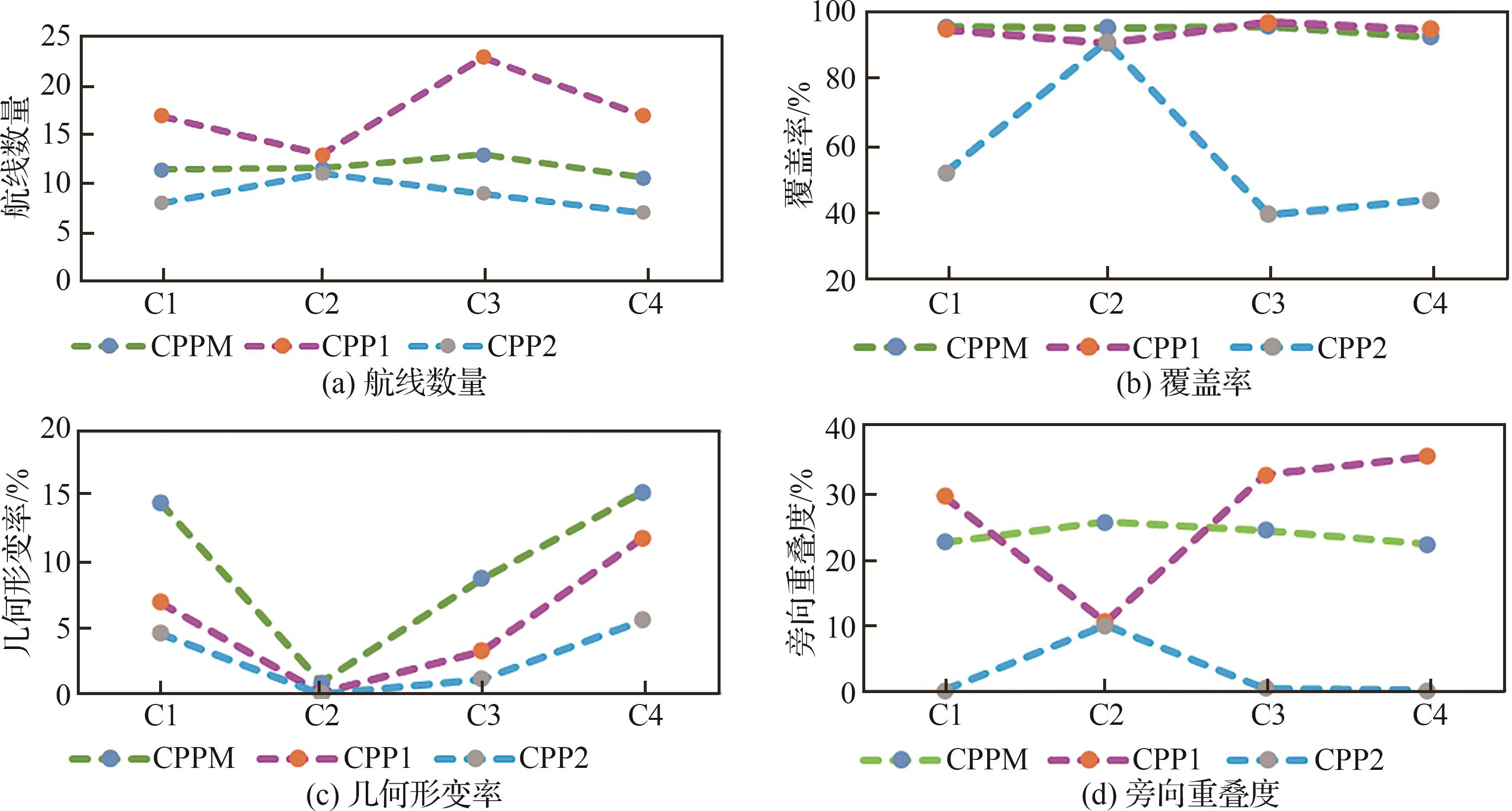
Table 4
Wilcoxon’s rank test results of the comparisons between CPPM and other methods
| 参数 | C1 | C2 | C3 | C4 | ||||
|---|---|---|---|---|---|---|---|---|
| CPP1 | CPP2 | CPP1 | CPP2 | CPP1 | CPP2 | CPP1 | CPP2 | |
| 航线数量 | 3.066 98×10-6 | 3.066 98×10-6 | 0.009 023 439 | 0.117 185 087 | 6.704 11×10-6 | 6.704 11×10-6 | 3.066 98×10-6 | 3.066 98×10-6 |
| 覆盖率 | 0.061 969 62 | 0.061 969 62 | 0.009 023 439 | 0.009 023 439 | 0.520 050 527 | 6.704 11×10-6 | 0.119 844 279 | 3.066 98×10-6 |
| 几何形变率 | 3.066 98×10-6 | 3.066 98×10-6 | 0.117 185 087 | 0.601 508 134 | 6.704 11×10-6 | 6.704 11×10-6 | 0.000 621 759 | 3.066 98×10-6 |
| 旁向重叠度 | 3.066 98×10-6 | 3.066 98×10-6 | 0.009 023 439 | 0.009 023 439 | 6.704 11×10-6 | 6.704 11×10-6 | 3.066 98×10-6 | 3.066 98×10-6 |
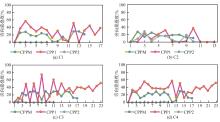
Fig.8
Overlap ratios of flight swath in different areas
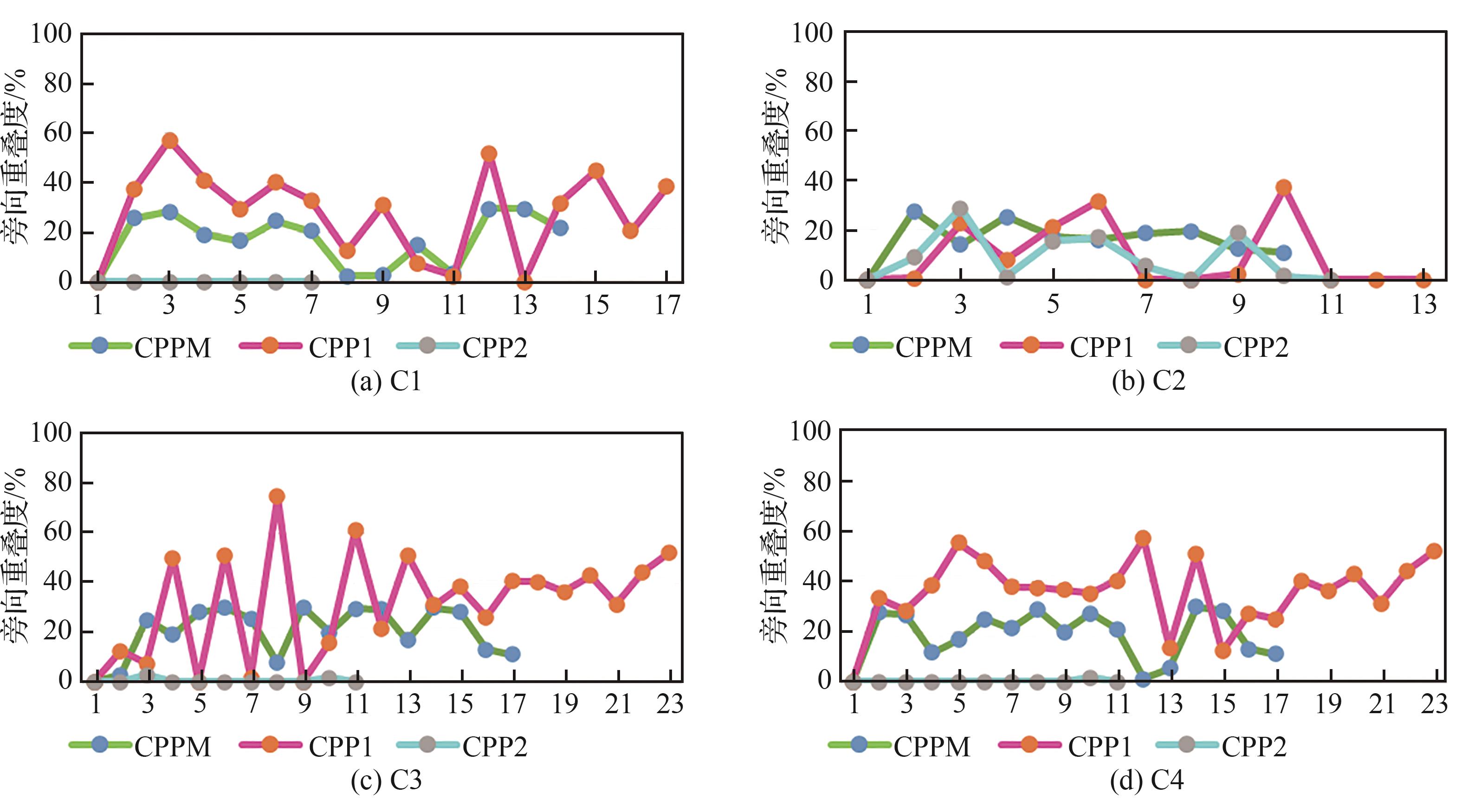
Table 5
Experiment results of two algorithms in different test areas
| 算法 | 覆盖率/% | 几何形变率/% | ||||||
|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | |
| CPPM | 97.30 | 93.98 | 96.55 | 92.80 | 8.03 | 0 | 5.47 | 14.73 |
| Greedy | 96.81 | 93.66 | 95.50 | 92.95 | 8.41 | 0 | 7.86 | 14.73 |
| 算法 | 航线数量/条 | 冗余航线数量/条 | ||||||
| C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 | |
| CPPM | 11 | 11 | 14 | 10 | 0 | 0 | 0 | 0 |
| Greedy | 12 | 10.5 | 13.8 | 10 | 1 | 0 | 0.8 | 0.2 |
Fig.9
Average return values of two algorithms in different test areas
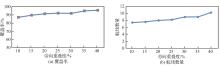
Fig.10
Experimental results with different overlap ratio
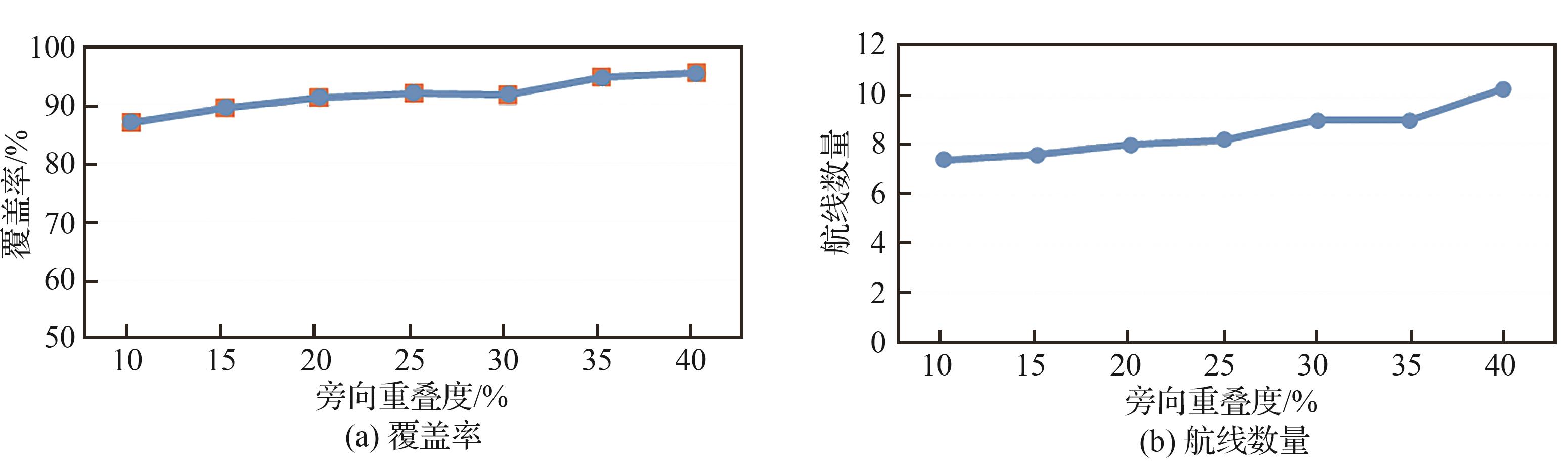
Fig.11
Coverage ratio with different temperature drop factor
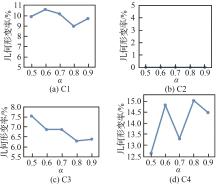
Fig.12
Geometric deformation ratio with different temperature drop factor
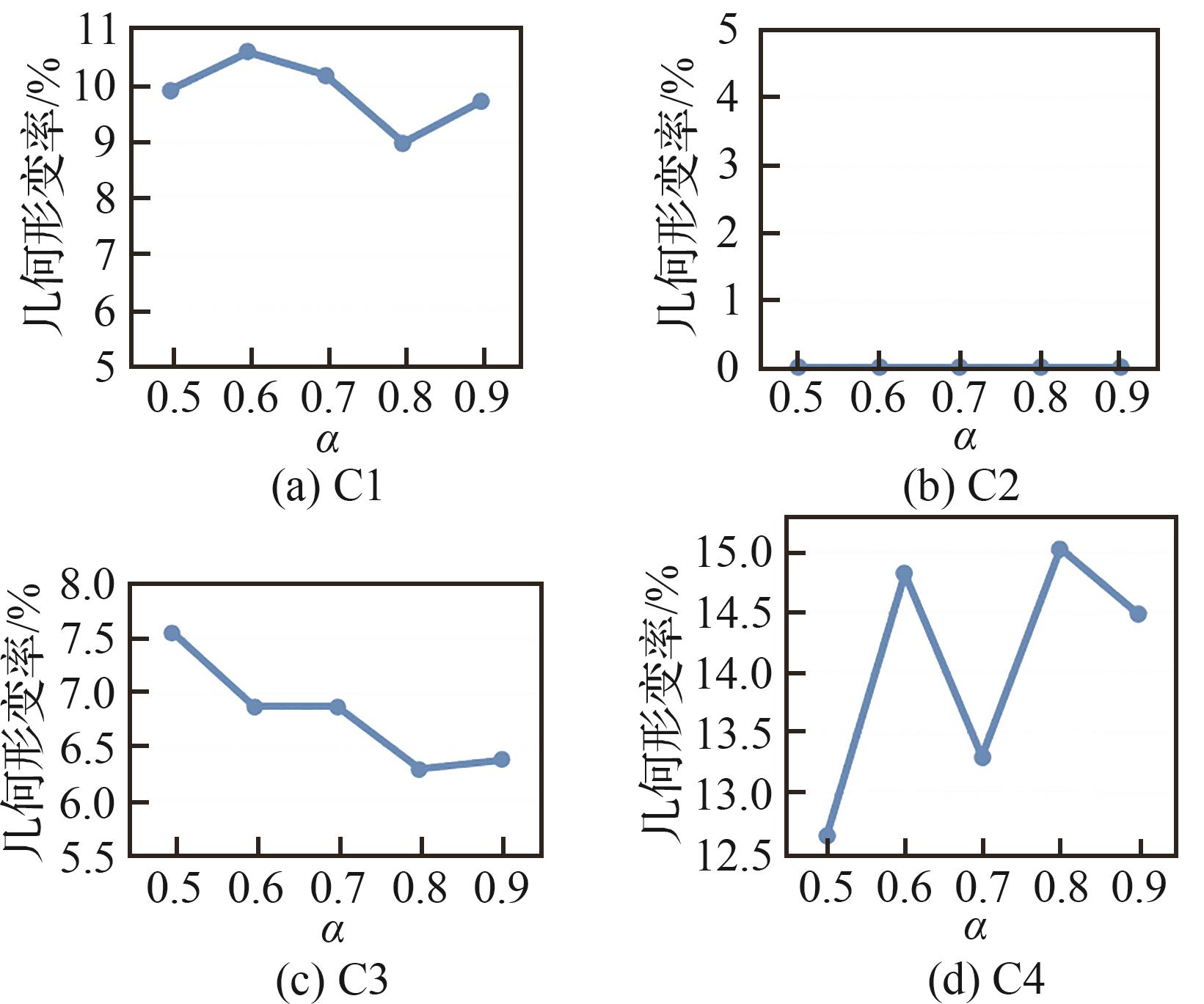

Fig.13
Number of redundant paths with different temperature drop factor
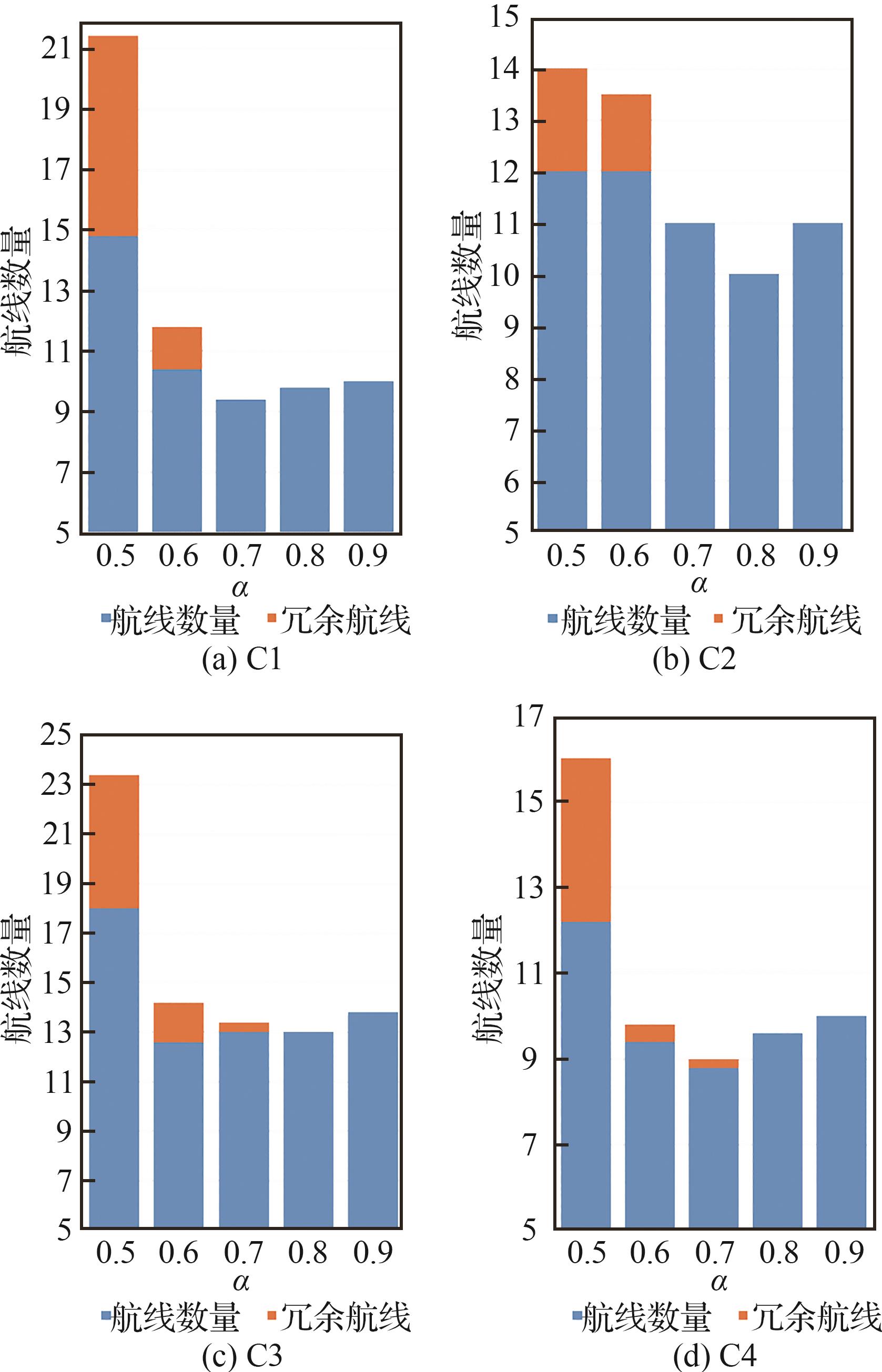
Fig.14
Coverage ratio with different initial temperature

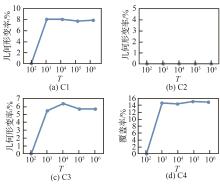
Fig.15
Geometric deformation ratio with different initial temperature
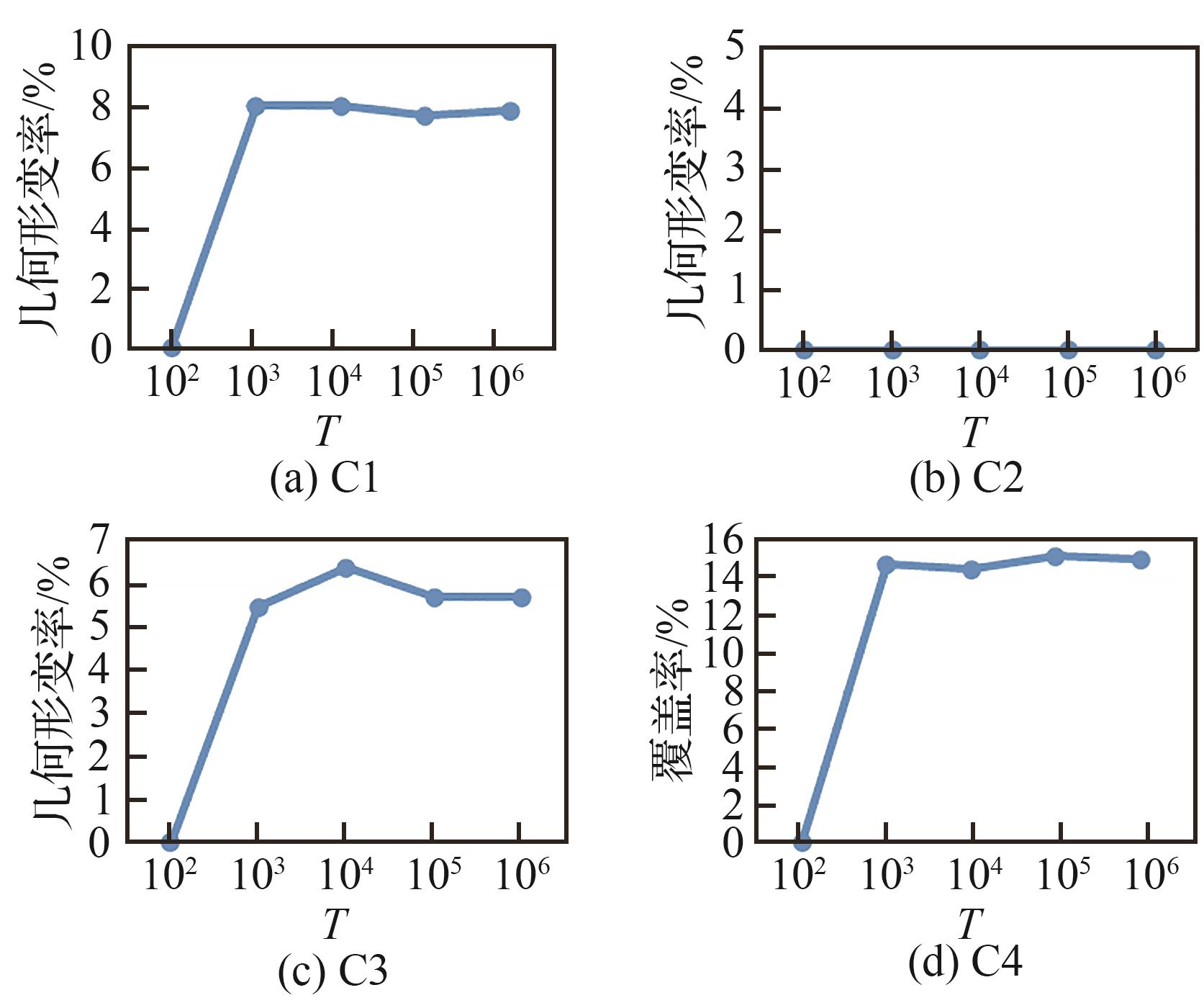

Fig.16
Number of redundant paths with different initial temperature
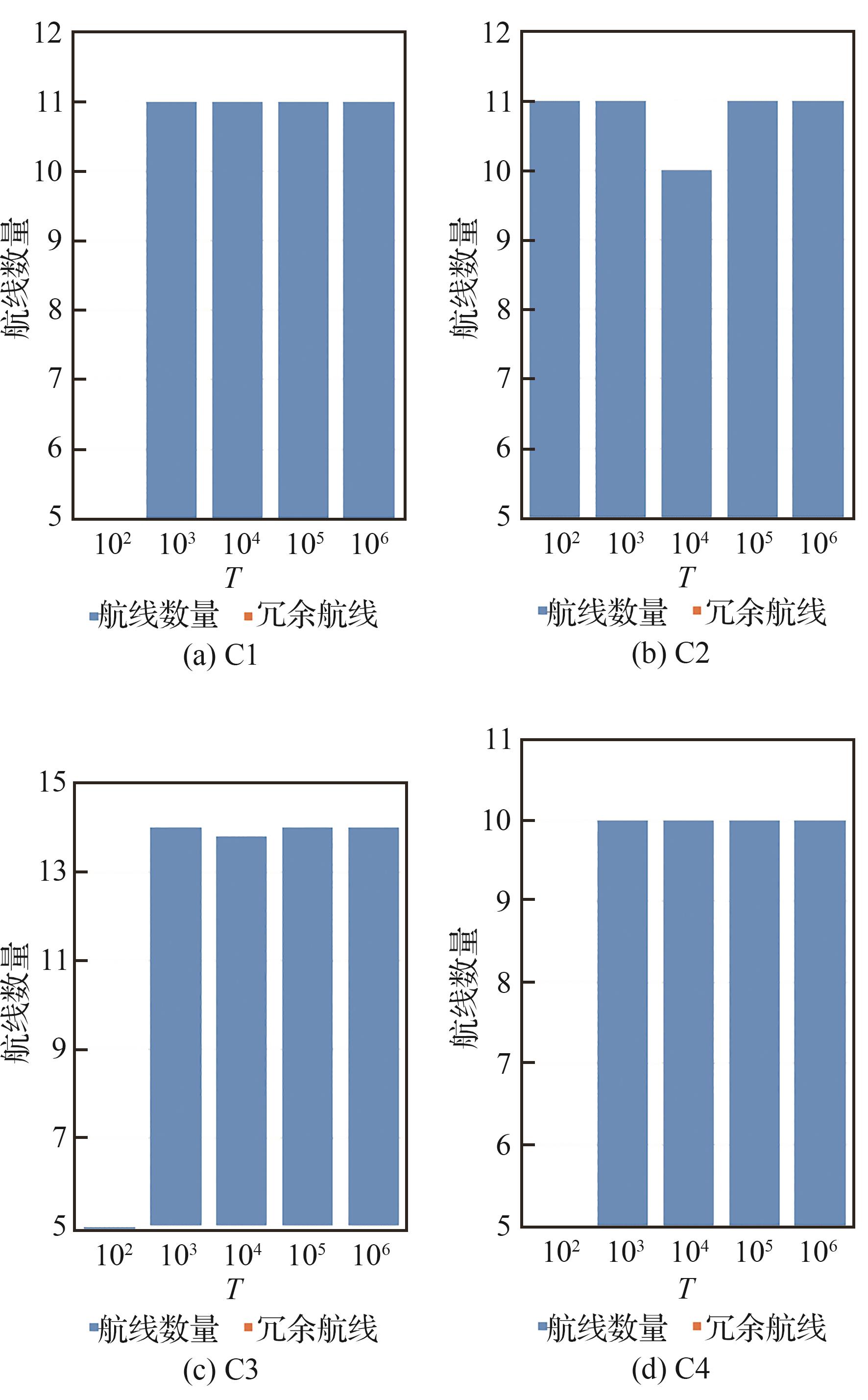
Fig.17
Coverage ratio with different termination temperature
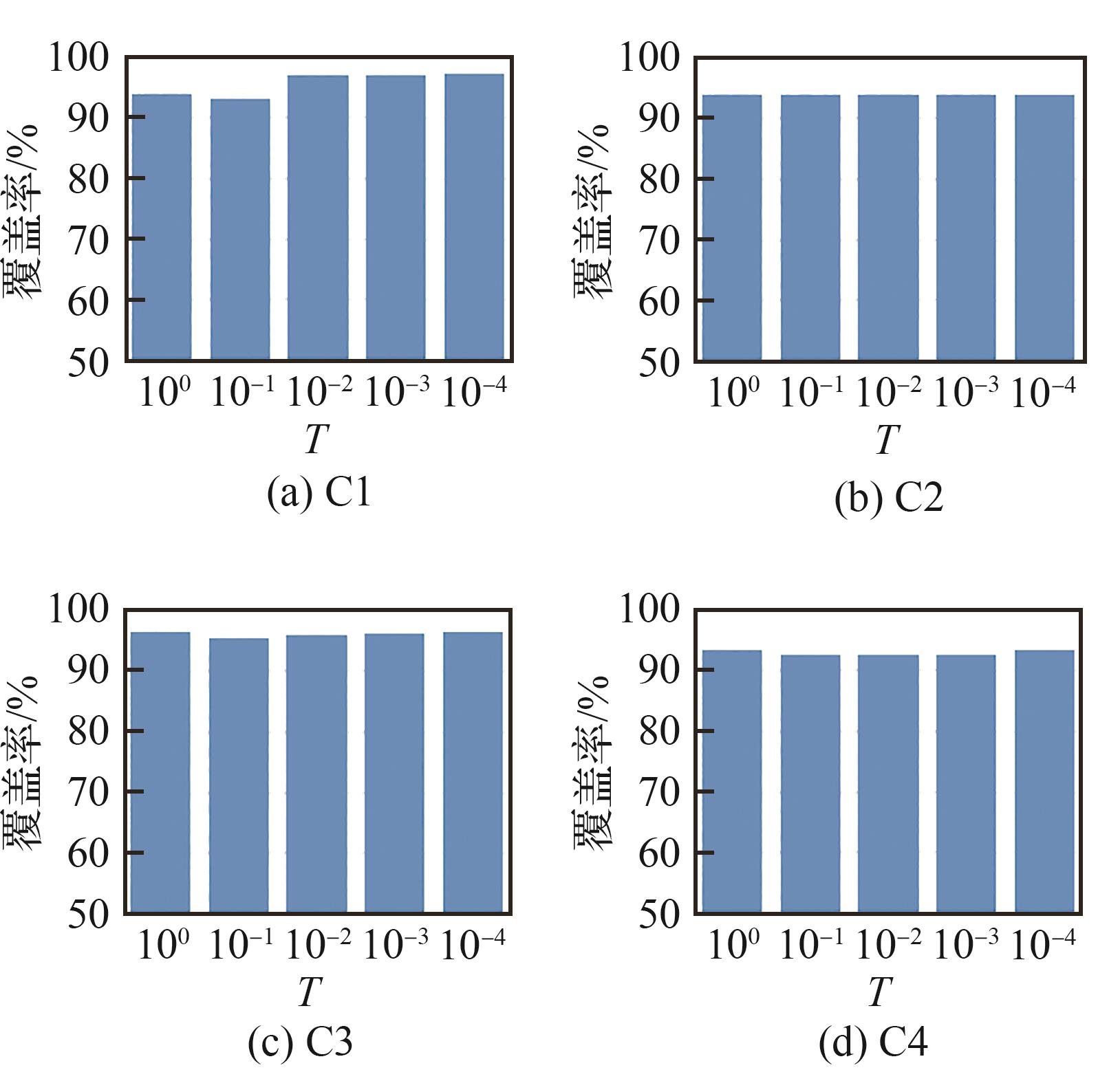
Fig.18
Geometric deformation ratio with different termination temperature
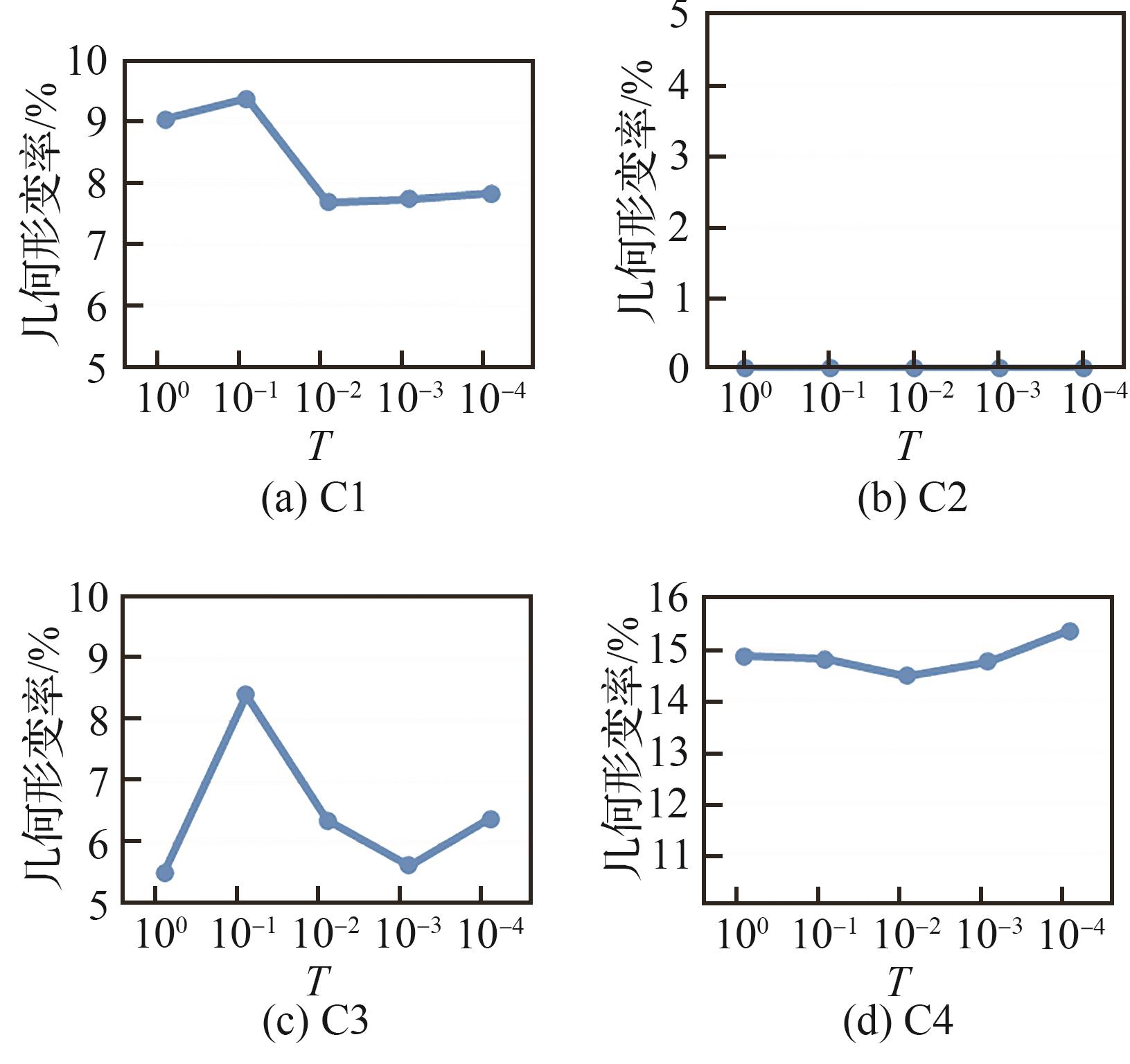

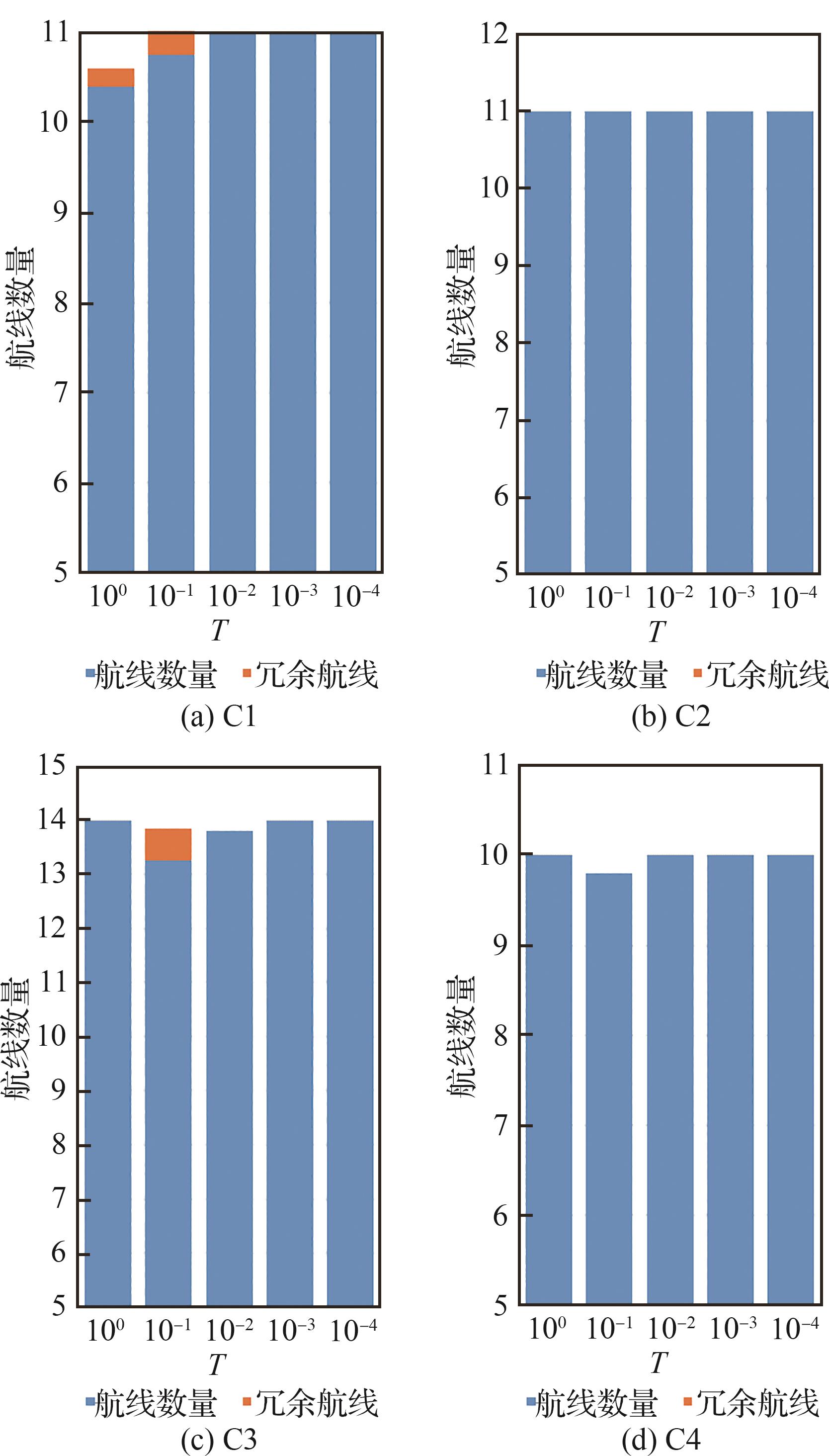
Fig.19
Number of redundant paths with different termination temperature
| 1 | LIU T G, XU P F, ZHANG S H. A review of recent advances in scanned topographic map processing[J]. Neurocomputing, 2019, 328: 75-87. |
| 2 | YANG Z Y, YU X Y, DEDMAN S, et al. UAV remote sensing applications in marine monitoring: knowledge visualization and review[J]. Science of the Total Environment, 2022, 838: 155939. |
| 3 | BHARDWAJ A, SAM L, MARTÍN-TORRES F J, et al. UAVs as remote sensing platform in glaciology: present applications and future prospects[J]. Remote Sensing of Environment, 2016, 175: 196-204. |
| 4 | LI B Y, HOU J M, LI D L, et al. Application of LiDAR UAV for high-resolution flood modelling[J]. Water Resources Management, 2021, 35(5): 1433-1447. |
| 5 | HASHEMI-BENI L, JONES J, THOMPSON G, et al. Challenges and opportunities for UAV-based digital elevation model generation for flood-risk management: a case of princeville, North Carolina[J]. Sensors, 2018, 18(11): 3843. |
| 6 | YU R, LYU M H, LU J H, et al. Spatial coordinates correction based on multi-sensor low-altitude remote sensing image registration for monitoring forest dynamics[J]. IEEE Access, 2020, 8: 18483-18496. |
| 7 | SUN L, WAN L T, WANG X P. Learning-based resource allocation strategy for industrial IoT in UAV-enabled MEC systems[J]. IEEE Transactions on Industrial Informatics, 2021, 17(7): 5031-5040. |
| 8 | RASMUSSEN J, AZIM S, BOLDSEN S K, et al. The challenge of reproducing remote sensing data from satellites and unmanned aerial vehicles (UAVs) in the context of management zones and precision agriculture[J]. Precision Agriculture, 2021, 22(3): 834-851. |
| 9 | HUANG Y B, REDDY K N, FLETCHER R S, et al. UAV low-altitude remote sensing for precision weed management[J]. Weed Technology, 2018, 32(1): 2-6. |
| 10 | 王京卫. 测绘无人机低空数字航摄影像去雾霾研究[J]. 测绘学报, 2016, 45(2): 251. |
| WANG J W. Study of the geo-UAV low-altitude digital aerial image haze removal[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(2): 251 (in Chinese). | |
| 11 | SHU G F, CHANG J H, LU J, et al. A novel method for SAR ship detection based on eigensubspace projection[J]. Remote Sensing, 2022, 14(14): 3441. |
| 12 | FENG Y, CHEN J E, HUANG Z X, et al. A lightweight position-enhanced anchor-free algorithm for SAR ship detection[J]. Remote Sensing, 2022, 14(8): 1908. |
| 13 | TORRES M, PELTA D A, VERDEGAY J L, et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55: 441-451. |
| 14 | CABREIRA T M, BRISOLARA L B, FERREIRA P R Jr. Survey on coverage path planning with unmanned aerial vehicles[J]. Drones, 2019, 3(1): 4. |
| 15 | CHEN G Z, SHEN Y, ZHANG Y X, et al. 2D multi-area coverage path planning using L-SHADE in simulated ocean survey[J]. Applied Soft Computing, 2021, 112: 107754. |
| 16 | 薛镇涛, 陈建, 张自超, 等. 基于复杂地块凸划分优化的多无人机覆盖路径规划[J]. 航空学报, 2022, 43(12): 403-417. |
| XUE Z T, CHEN J, ZHANG Z C, et al. Multi-UAV coverage path planning based on optimization of convex division of complex plots[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(12): 403-417 (in Chinese). | |
| 17 | CABREIRA T M, DI FRANCO C, FERREIRA P R, et al. Energy-aware spiral coverage path planning for UAV photogrammetric applications[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 3662-3668. |
| 18 | 夏阳升, 石建迈, 陈超, 等. 车机协同多区域覆盖侦察路径规划方法[J]. 指挥与控制学报, 2020, 6(4): 372-380. |
| XIA Y S, SHI J M, CHEN C, et al. Path planning method for multi-area reconnaissance by cooperated ground vehicle and drone[J]. Journal of Command and Control, 2020, 6(4): 372-380 (in Chinese). | |
| 19 | MARICA V, CURIAC C D, QUENTEL P Y M, et al. Static coverage path planning for UAVs with conical field of view when monitoring rectangular ground areas[C]∥ 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC). Piscataway: IEEE Press, 2019: 510-514. |
| 20 | CHO S W, PARK H J, LEE H, et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers & Industrial Engineering, 2021, 161: 107612. |
| 21 | YANG C H, TSAI M H, KANG S C, et al. UAV path planning method for digital terrain model reconstruction - A debris fan example[J]. Automation in Construction, 2018, 93: 214-230. |
| 22 | GUASTELLA D C, CANTELLI L, GIAMMELLO G, et al. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments[J]. Computers & Electrical Engineering, 2019, 75: 189-201. |
| 23 | CAO Y, CHENG X H, MU J Z. Concentrated coverage path planning algorithm of UAV formation for aerial photography[J]. IEEE Sensors Journal, 2022, 22(11): 11098-11111. |
| 24 | VASQUEZ GOMEZ J I, MELCHOR M M, HERRERA LOZADA J C. Optimal coverage path planning based on the rotating calipers algorithm[C]∥ 2017 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE). Piscataway: IEEE Press, 2017: 140-144. |
| 25 | MAYILVAGANAM K, SHRIVASTAVA A, RAJAGOPAL P. An optimal coverage path plan for an autonomous vehicle based on polygon decomposition and ant colony optimisation[J]. Ocean Engineering, 2022, 252: 111101. |
| 26 | MANSOURI S S, KANELLAKIS C, GEORGOULAS G, et al. 2D visual area coverage and path planning coupled with camera footprints[J]. Control Engineering Practice, 2018, 75: 1-16. |
| 27 | BEZAS K, TSOUMANIS G, ANGELIS C T, et al. Coverage path planning and point-of-interest detection using autonomous drone swarms[J]. Sensors, 2022, 22(19): 7551. |
| 28 | LUNA M A, ALE ISAAC M S, RAGAB A R, et al. Fast multi-UAV path planning for optimal area coverage in aerial sensing applications[J]. Sensors, 2022, 22(6): 2297. |
| 29 | DAI R, FOTEDAR S, RADMANESH M, et al. Quality-aware UAV coverage and path planning in geometrically complex environments[J]. Ad Hoc Networks, 2018, 73: 95-105. |
| 30 | 王炳乾, 陈超, 王华军, 等. 基于等高线构建无人机航线的新型仿地飞行策略[J]. 测绘通报, 2020(11): 104-107, 115. |
| WANG B Q, CHEN C, WANG H J, et al. A new ground-like flight method based on contours to construct drone routes[J]. Bulletin of Surveying and Mapping, 2020(11): 104-107, 115 (in Chinese). | |
| 31 | WANG H P, ZHANG S Y, ZHANG X Y, et al. Near-optimal 3-D visual coverage for quadrotor unmanned aerial vehicles under photogrammetric constraints[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1694-1704. |
| 32 | DAI X H, QUAN Q, REN J R, et al. An analytical design-optimization method for electric propulsion systems of multicopter UAVs with desired hovering endurance[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 228-239. |
| 33 | 陈玥, 李英成, 李兵, 等. 复杂地势下轻小型无人机LiDAR自主航线设计[J]. 测绘科学, 2021, 46(3): 104-109, 132. |
| CHEN, Y, LI Y C, LI B, et al. Design of LiDAR autonomous route for light and small drones under complex terrain[J]. Science of Surveying and Mapping, 2021, 46(3): 104-109, 132 (in Chinese). | |
| 34 | VO A V, LAEFER D F, BYRNE J. Optimizing urban LiDAR flight path planning using a genetic algorithm and a dual parallel computing framework[J]. Remote Sensing, 2021, 13(21): 4437. |
| 35 | LIU N, LI X W, PENG X, et al. SAR tomography based on atomic norm minimization in urban areas[J]. Remote Sensing, 2022, 14(14): 3439. |
| 36 | 张同同, 杨红磊, 李东明, 等. SAR影像中叠掩与阴影区域的识别: 以湖北巴东为例[J]. 测绘通报, 2019(11): 85-88. |
| ZHANG T T, YANG H L, LI D M, et al. Identification of layover and shadows regions in SAR images: —taking Badong as an example[J]. Bulletin of Surveying and Mapping, 2019(11): 85-88 (in Chinese). | |
| 37 | 赵争. 地形复杂区域InSAR高精度DEM提取方法[J]. 测绘学报, 2016, 45(11): 1385. |
| ZHAO Z. Methods on high-accuracy DEM extraction from interferometric SAR in sophisticated terrain areas[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(11): 1385 (in Chinese). | |
| 38 | KUMAR G N, AHMED M S, SARKAR A K, et al. Reentry trajectory optimization using gradient free algorithms[J]. IFAC-PapersOnLine, 2018, 51(1): 650-655. |
| 39 | FAHIMNIA B, DAVARZANI H, ESHRAGH A. Planning of complex supply chains: a performance comparison of three meta-heuristic algorithms[J]. Computers & Operations Research, 2018, 89: 241-252. |
| 40 | IQBAL A, AL-GHAMDI K A. Energy-efficient cellular manufacturing system: Eco-friendly revamping of machine shop configuration[J]. Energy, 2018, 163: 863-872. |
| 41 | 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划[J]. 航空学报, 2020, 41(): 723770. |
| DAI J, XU F, CHEN Q F. Multi-UAV cooperative search on region division and path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(Sup 1): 723770 (in Chinese). | |
| 42 | SAADI A AIT, SOUKANE A, MERAIHI Y, et al. UAV path planning using optimization approaches: a survey[J]. Archives of Computational Methods in Engineering, 2022, 29(6): 4233-4284. |
| [1] | Lianbo YU, Pinzhao CAO, Liang SHI, Jie LIAN, Dong WANG. An improved conflict⁃based search algorithm for multi⁃agent path planning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727648-727648. |
| [2] | Yong XU, Hongtao YAN, Tao JIA, Yue MA, Zehua DENG, Duoneng LIU. Aerial simulation docking technology of fixed-wing clustering UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 326539-326539. |
| [3] | Bing WANG, Runyuan ZOU, Zhening CHANG. Aircraft takeoff mass estimation method based on improved simulated annealing algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(16): 328090-328090. |
| [4] | Guohua WU, Tianyu WANG. Large-scale constellation TT&C resource scheduling algorithm based on adaptive simulated annealing [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 327759-327759. |
| [5] | Quanyou YU, Zhizheng XU, Na DUAN, Mimi XU, Yi CHENG. Coverage operation path planning of UAV with endurance constraints based on improved ACO [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 327856-327856. |
| [6] | Hua GUO, Xiaohe GUO. Local path planning algorithm for UAV based on improved velocity obstacle method [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(11): 327586-327586. |
| [7] | XUE Zhentao, CHEN Jian, ZHANG Zichao, LIU Xuzan, MIAO Xiansheng, HU Gui. Multi-UAV coverage path planning based on optimization of convex division of complex plots [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 325990-325990. |
| [8] | CAO Xianbin, YANG Peng. Prospects of channel modeling and dynamic deployment technologies of near space information network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(10): 527332-527332. |
| [9] | ZHOU Bin, GUO Yan, LI Ning, ZHONG Xijian. Path planning of UAV using guided enhancement Q-learning algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(9): 325109-325109. |
| [10] | LUO Qing, ZHANG Tao, SHAN Peng, ZHANG Wentao, LIU Zihao. Generating reconfiguration blueprints for IMA systems based on improved Q-learning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(8): 525792-525792. |
| [11] | HU Xinting, WU Yu. Risk-based discrete multi-path planning method for UAVs in urban environments [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 324383-324383. |
| [12] | PANG Lei, CAO Zhiqiang, YU Junzhi. A pedestrian-aware collision-free following approach for mobile robots based on A* and TEB [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524909-524909. |
| [13] | ZOU Shiyu, LI Fuming, XIE Aiping, ZHOU Tao, LIU Peng. Resource allocation based on improved fireworks algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(12): 324716-324716. |
| [14] | ZHAO Huan, JIANG Zongmin, DING Han. Tool path planning for profiling grinding of aero-engine blade edge [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(10): 524318-524318. |
| [15] | WU Kun, TAN Shaochang. Path planning of UAVs based on improved whale optimization algorithm [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724286-724286. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341