Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (4): 328816-328816.doi: 10.7527/S1000-6893.2023.28816
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Zhu WANG1( ), Mengtong ZHANG1, Zhenpeng ZHANG1, Guangtong XU2
), Mengtong ZHANG1, Zhenpeng ZHANG1, Guangtong XU2
Received:2023-04-04
Revised:2023-05-05
Accepted:2023-09-06
Online:2024-02-25
Published:2023-09-13
Contact:
Zhu WANG
E-mail:wangzhubit@163.com
Supported by:CLC Number:
Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816.
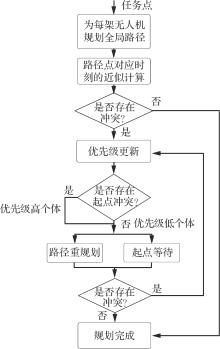
Fig.1
Flow chart of cooperative path planning
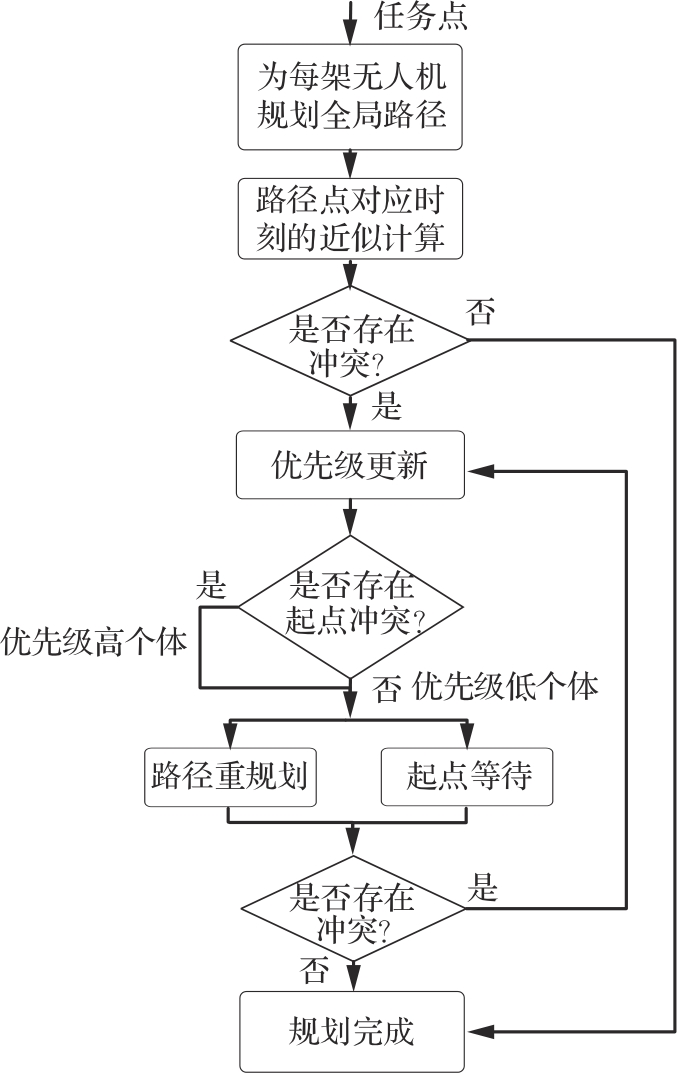
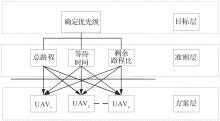
Fig.2
Hierarchical model

Table 1
Pairwise comparison discriminant matrix
| 确定优先级 | 总路程 | 等待时间 | 剩余路程比 |
|---|---|---|---|
| 总路程 | a11 | a12 | a13 |
| 等待时间 | a21 | a22 | a23 |
| 剩余路程比 | a31 | a32 | a33 |
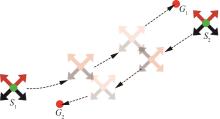
Fig.3
Schematic diagram of opposite conflict

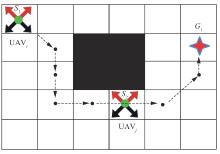
Fig.4
Schematic diagram of start-point conflict
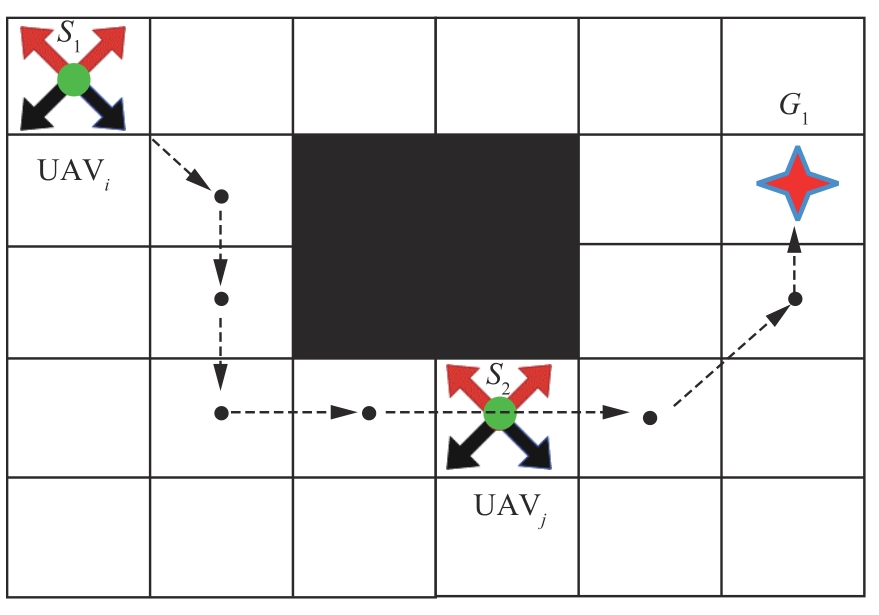

Fig.5
Flowchart of WM-Lazy Theta*
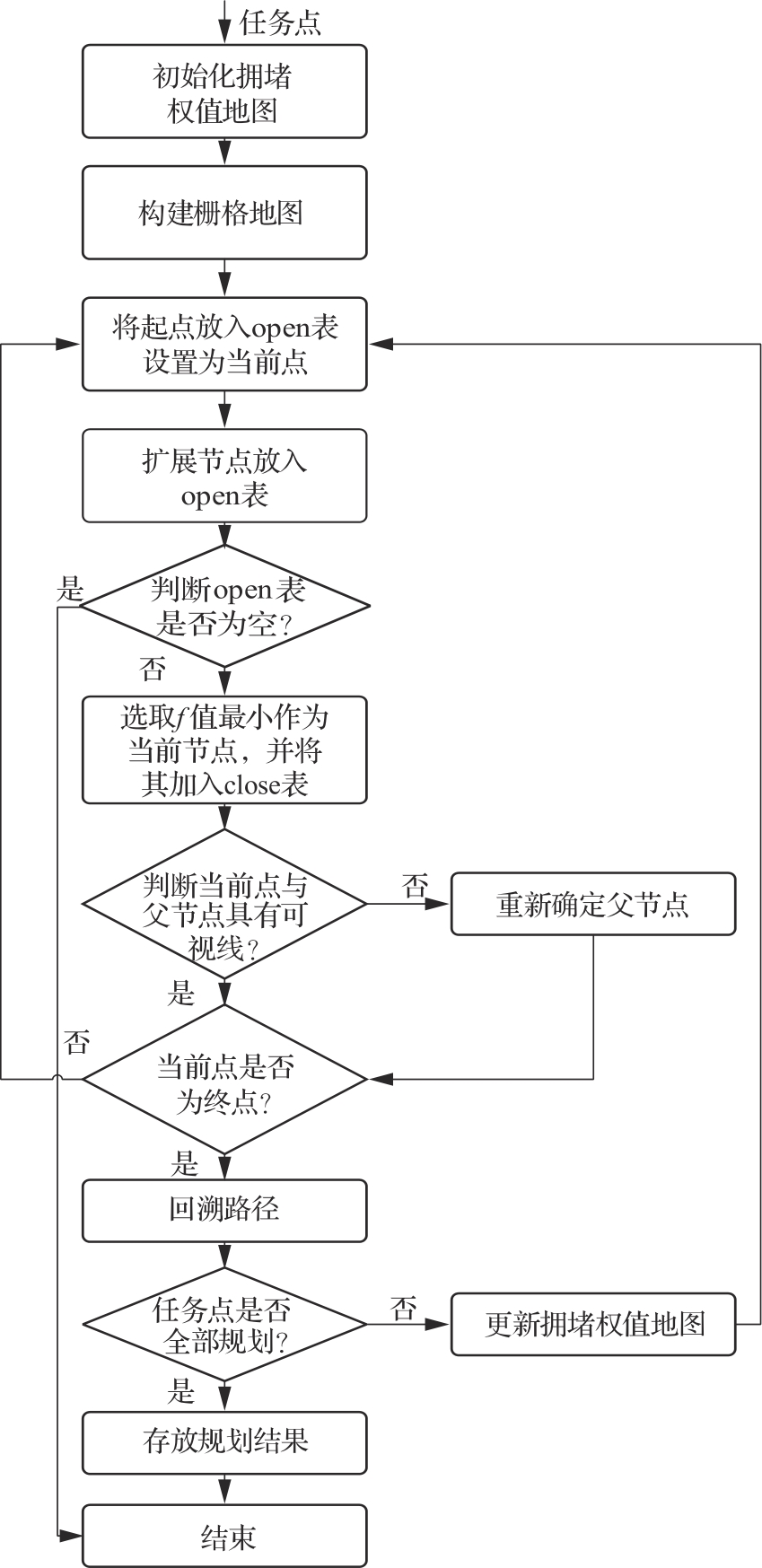

Fig.6
Congestion weighted map at t=10 s
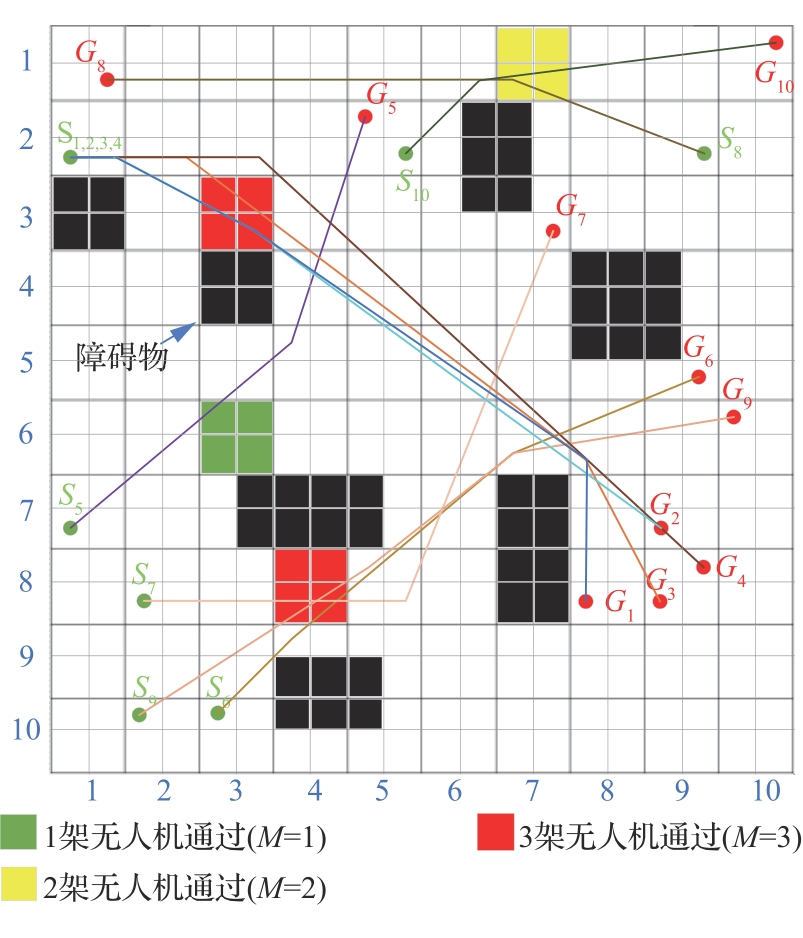
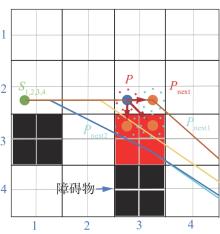
Fig.7
Expanded nodes after introducing congestion weighted map
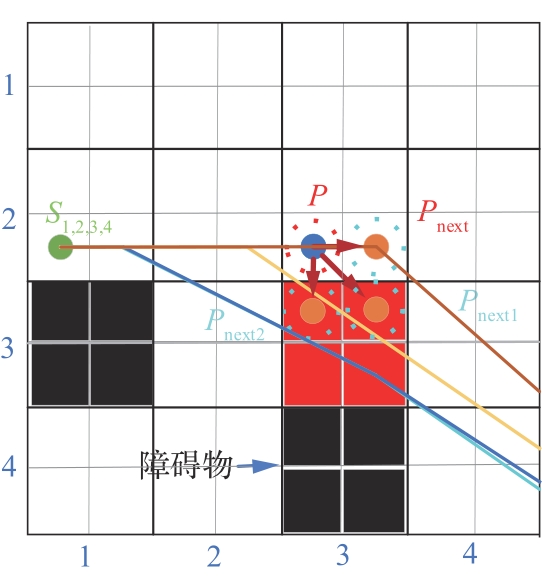
Table 2
Weight calculation pairwise comparison matrix
| 确定优先级 | 总路程 | 等待时间 | 剩余路程比 |
|---|---|---|---|
| 总路程 | 1 | 3 | 5 |
| 等待时间 | 1/3 | 1 | 3 |
| 剩余路程比 | 1/5 | 1/3 | 1 |

Fig.8
Cooperative path planning results for three swarm-scale scenarios
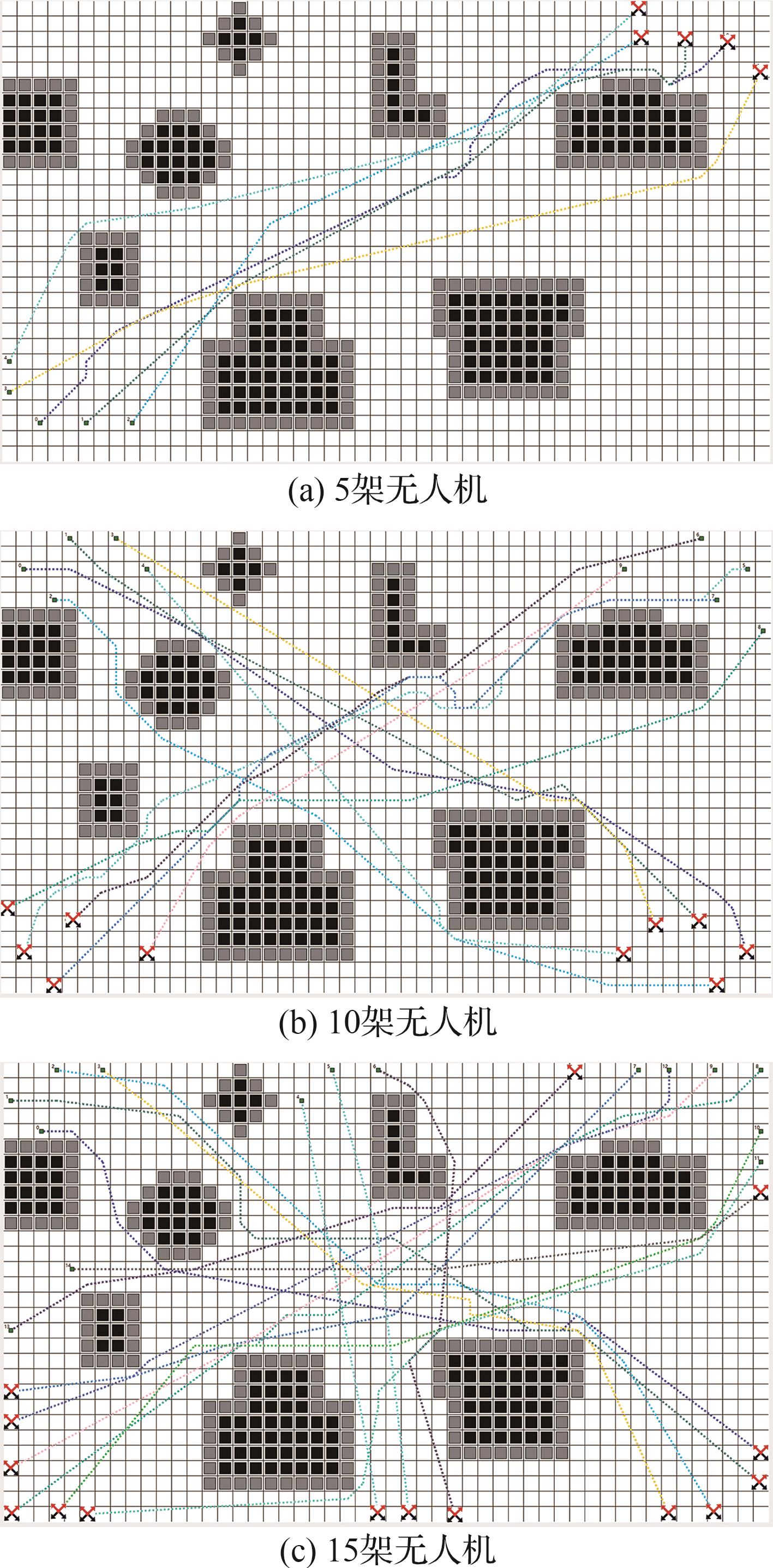

Fig.9
Minimum distance for three swarm-scale scenarios
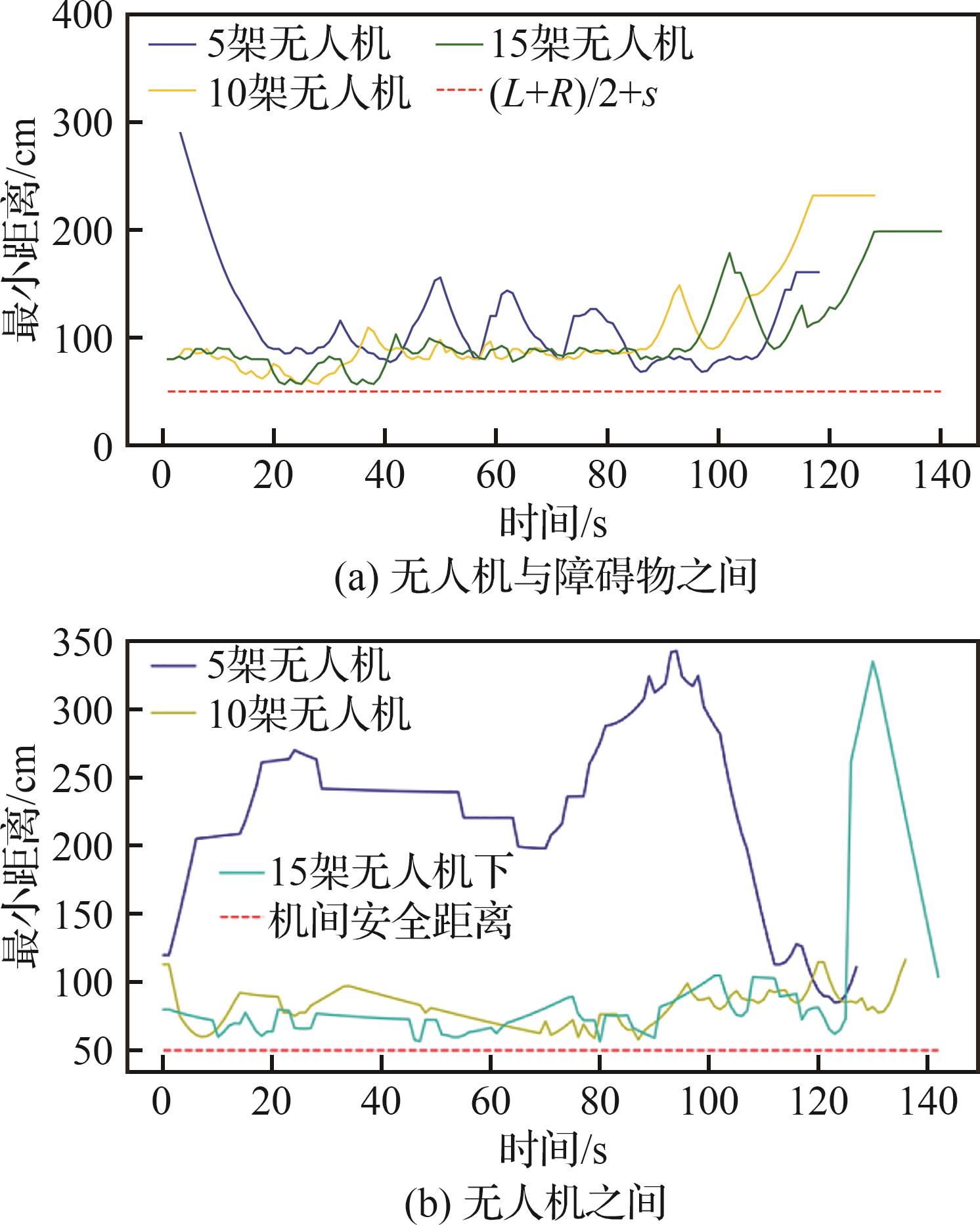
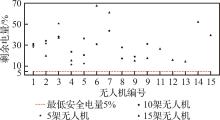
Fig.10
Remained electricity for three swarm-scale scenarios
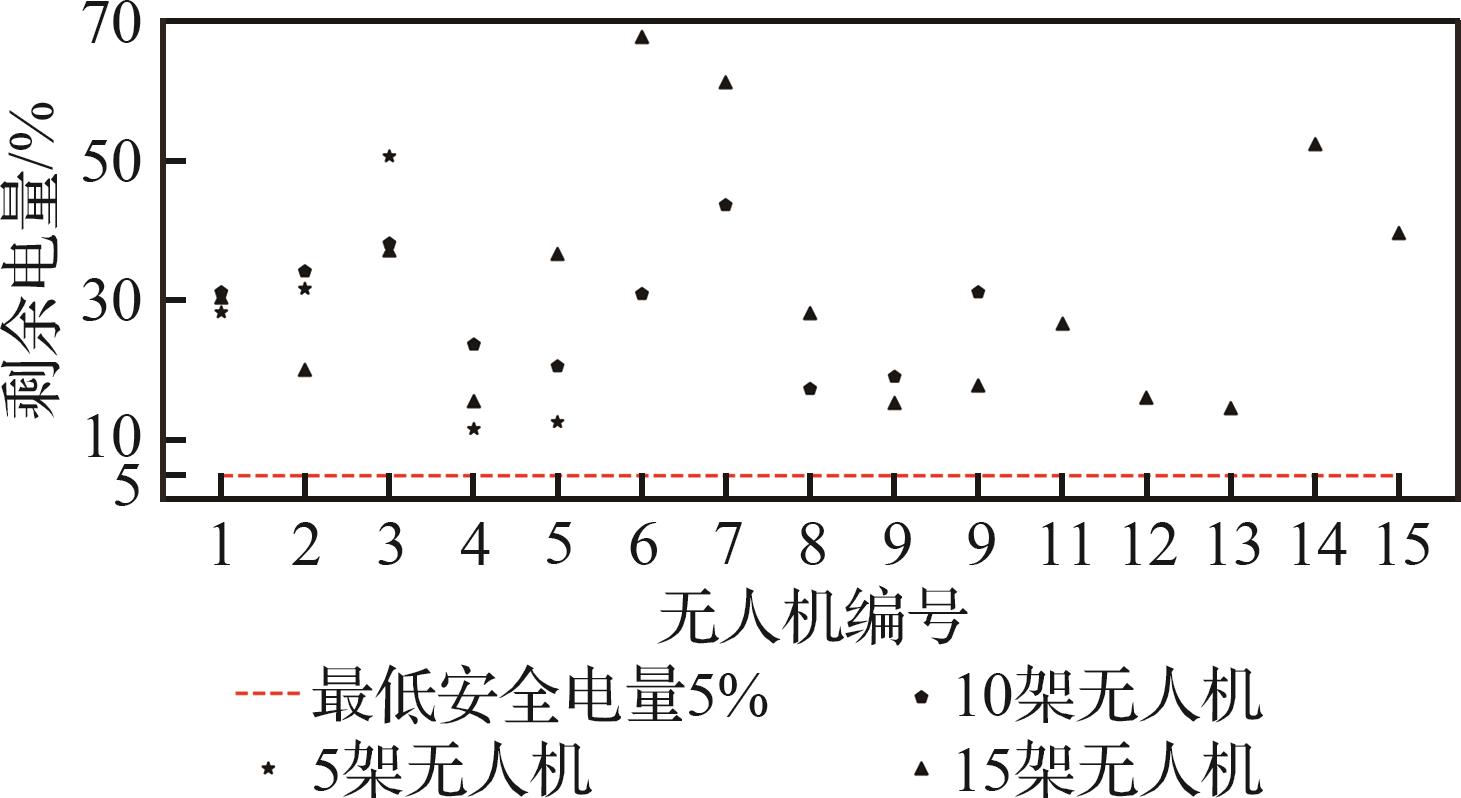
Table 3
Comparison of results of two priority-based methods
| 无人机规模/架 | 求解结果 | 多指标动态优先级/s | 飞行时间驱动的动态优先级/s |
|---|---|---|---|
| 5 | 任务完成时间 | 115.11 | 112.10 |
| 规划耗时 | 0.88 | 5.88 | |
| 10 | 任务完成时间 | 119.82 | 128.05 |
| 规划耗时 | 5.18 | 20.20 | |
| 15 | 任务完成时间 | 120.14 | 123.94 |
| 规划耗时 | 5.54 | 10.62 |
Table 4
Exapmles of computation results of drone priority
| 无人机规模/架 | 迭代步数 | 发生冲突的无人机编号组合及其优先级结果 | |
|---|---|---|---|
| 飞行时间驱动动态优先级 | 多指标动态优先级 | ||
| 5 | 4 | {3, 1}, {1, 4}, {3, 5}, {3, 4}, {5, 4} | {1, 4}, {5, 1},{3, 2},{5, 4} |
| 10 | 10 | {9, 1}, {5, 8}, {5, 9}, {5, 7} | {1, 9}, {8, 6},{8, 9},{8, 1} |
| 15 | 22 | {8, 1}, {14, 2}, {8, 13}, {10, 9} | {14, 2}, {11, 9},{11, 15} |

Fig.11
Priority index values at 4th iteration for 5 drones
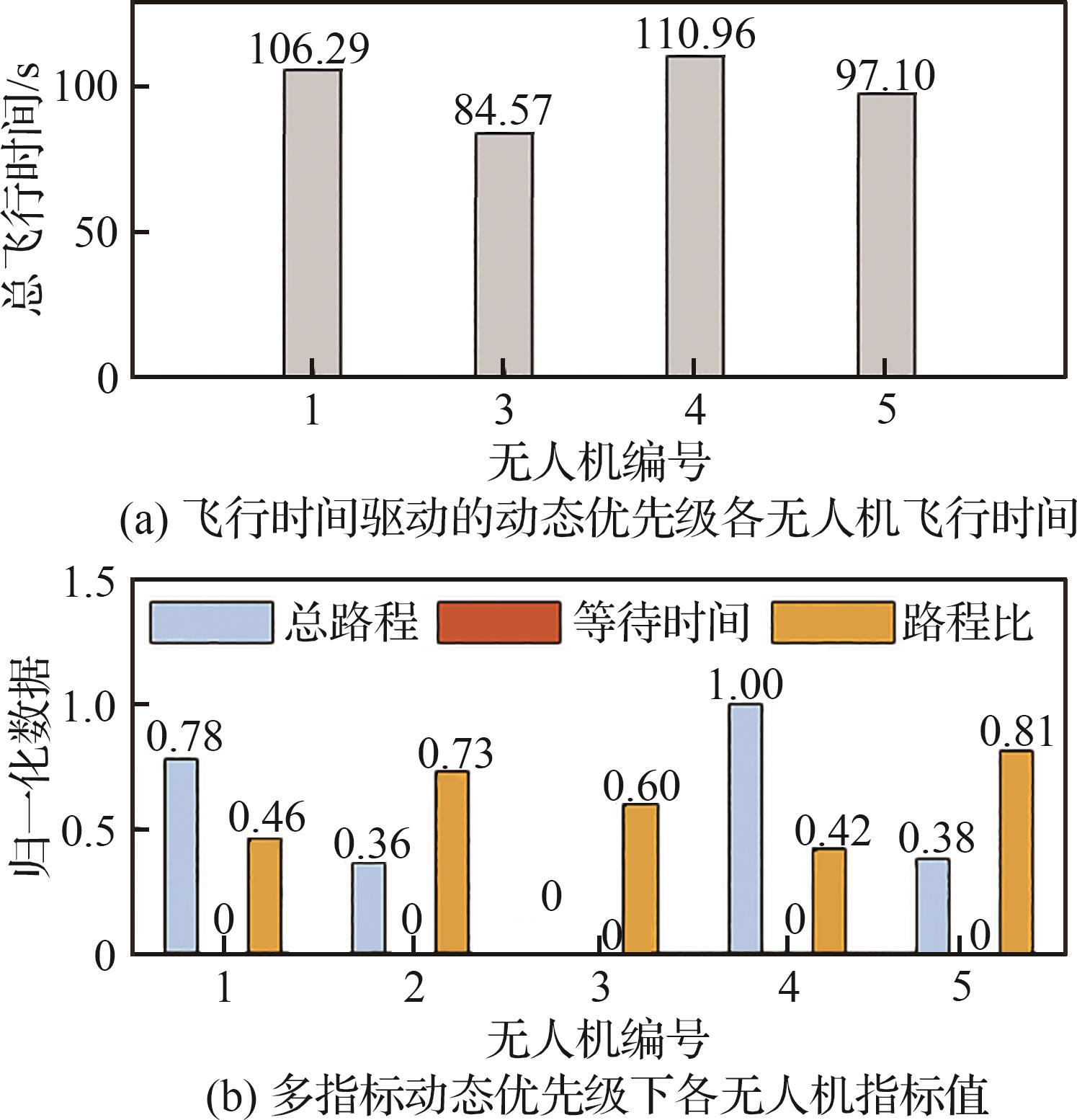

Fig.12
Priority index values at 10th iteration for 10 drones

Fig. 13
Priority index values at 22nd iteration for 15 drones
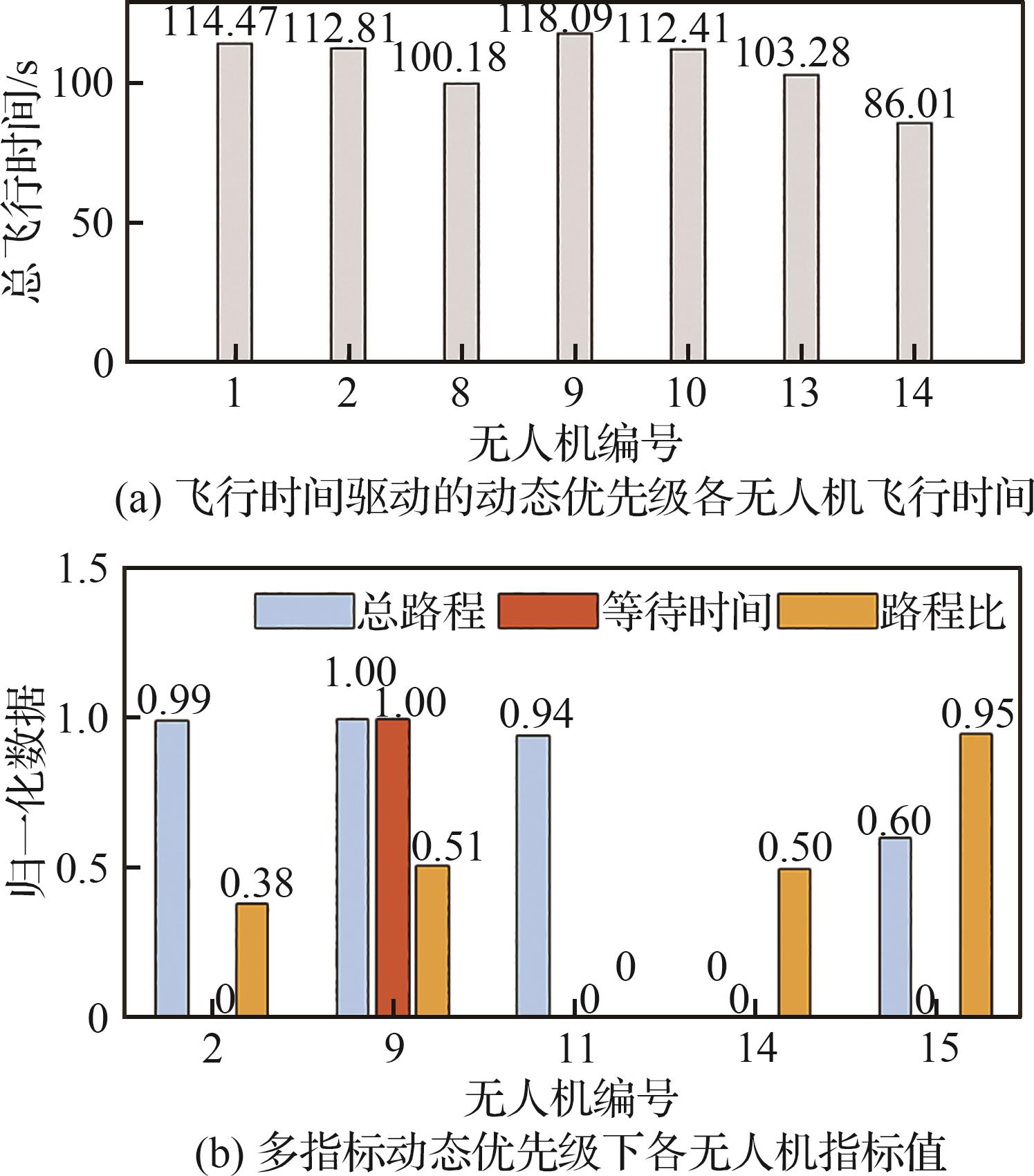
Table 5
Comparison of results of different UAV planning algorithms
| 无人机规模/架 | 求解结果 | WM-Lazy Theta*/s | Lazy Theta*/s |
|---|---|---|---|
| 5 | 任务完成时间 | 115.11 | 110.24 |
| 规划耗时 | 0.88 | 2.18 | |
| 10 | 任务完成时间 | 119.82 | 114.45 |
| 规划耗时 | 5.18 | 15.85 | |
| 15 | 任务完成时间 | 120.14 | 126.12 |
| 规划耗时 | 5.54 | 15.81 |
Fig.14
Comparison of congestion area for 15 UAVs
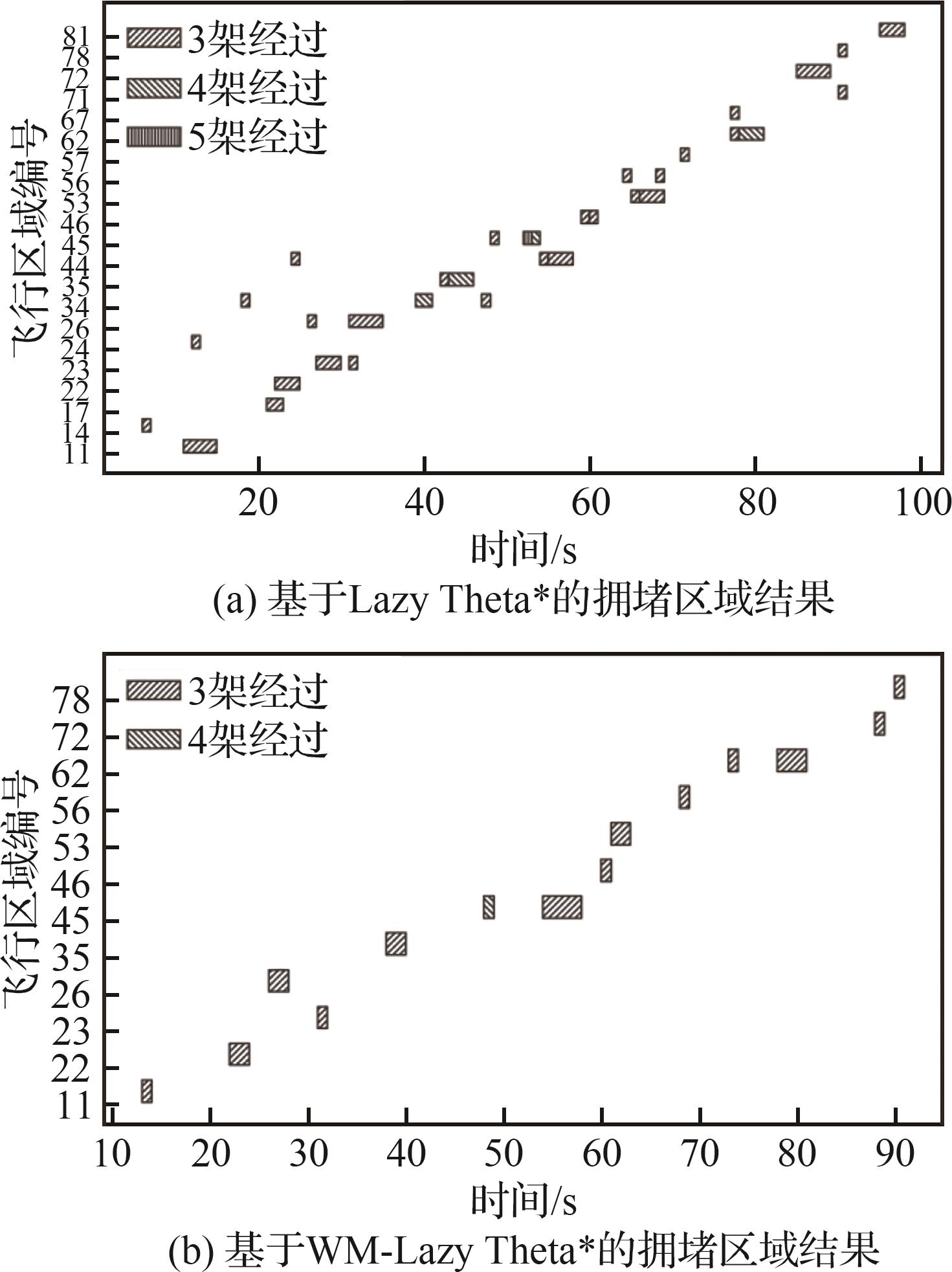
Table 6
Comparison of results of three avoidance strategies
| 无人机规模/架 | 求解结果 | 组合规避策略/s | 重规划策略/s | 等待策略/s |
|---|---|---|---|---|
| 5 | 任务完成时间 | 115.11 | 111.96 | 117.20 |
| 规划耗时 | 0.88 | 1.26 | 0.12 | |
| 10 | 任务完成时间 | 119.82 | 117.87 | 137.11 |
| 规划耗时 | 5.18 | 7.86 | 0.75 | |
| 15 | 任务完成时间 | 120.14 | 118.3 | 151.96 |
| 规划耗时 | 5.54 | 9.3 | 2.76 |
| 1 | LI S, ZHANG H H, LI Z L, et al. An air route network planning model of logistics UAV terminal distribution in urban low altitude airspace[J]. Sustainability, 2021, 13(23): 13079. |
| 2 | LI K, NI W, TOVAR E, et al. On-board deep Q-network for UAV-assisted online power transfer and data collection[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 12215-12226. |
| 3 | 杨旭, 王锐, 张涛. 面向无人机集群路径规划的智能优化算法综述[J]. 控制理论与应用, 2020, 37(11): 2291-2302. |
| YANG X, WANG R, ZHANG T. Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J]. Control Theory & Applications, 2020, 37(11): 2291-2302 (in Chinese). | |
| 4 | XU C, XU M, YIN C J. Optimized multi-UAV cooperative path planning under the complex confrontation environment[J]. Computer Communications, 2020, 162: 196-203. |
| 5 | XU L, CAO X B, DU W B, et al. Cooperative path planning optimization for multiple UAVs with communication constraints[J]. Knowledge-Based Systems, 2023, 260: 110164. |
| 6 | MOHANAN M G, SALGOANKAR A. A survey of robotic motion planning in dynamic environments[J]. Robotics and Autonomous Systems, 2018, 100: 171-185. |
| 7 | CHUNG S J, PARANJAPE A A, DAMES P, et al. A survey on aerial swarm robotics[J]. IEEE Transactions on Robotics, 2018, 34(4): 837-855. |
| 8 | XU G T, CAO Y, SUN J L, et al. Real-time path generation for UAV swarms using receding planning framework and priority decoupling mechanism[C]∥ 2021 33rd Chinese Control and Decision Conference (CCDC). Piscataway: IEEE Press, 2021: 4338-4343. |
| 9 | 徐广通, 王祝, 曹严, 等. 动态优先级解耦的无人机集群轨迹分布式序列凸规划[J]. 航空学报, 2022, 43(2): 325059. |
| XU G T, WANG Z, CAO Y, et al. Dynamic-priority-decoupled UAV swarm trajectory planning using distributed sequential convex programming[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(2): 325059 (in Chinese). | |
| 10 | VELAGAPUDI P, SYCARA K, SCERRI P. Decentralized prioritized planning in large multirobot teams[C]∥ 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2010: 4603-4609. |
| 11 | ERDMANN M, LOZANO-PÉREZ T. On multiple moving objects[J]. Algorithmica, 1987, 2(1-4): 477-521. |
| 12 | DU L Z, KE S F, WANG Z, et al. Research on multi-load AGV path planning of weaving workshop based on time priority[J]. Mathematical Biosciences and Engineering, 2019, 16(4): 2277-2292. |
| 13 | ZHANG Y, WANG F L, FU F K, et al. Multi-AGV path planning for indoor factory by using prioritized planning and improved ant algorithm[J]. Journal of Engineering and Technological Sciences, 2018, 50(4): 534-547. |
| 14 | TAI R C, WANG J C, CHEN W D. A priori tized planning algorithm of trajectory coordination based on time windows for multiple AGVs with delay disturbance[J]. Assembly Automation, 2019, 39(05): 753-768. |
| 15 | GUNEY M ALI, RAPTIS I A. Dynamic prioritized motion coordination of multi-AGV systems[J]. Robotics and Autonomous Systems, 2021, 139: 103534. |
| 16 | LI H, LONG T, XU G T, et al. Coupling-degree-based heuristic prioritized planning method for UAV swarm path generation[C]∥ 2019 Chinese Automation Congress (CAC). Piscataway: IEEE Press, 2020: 3636-3641. |
| 17 | DANIEL K, NASH A, KOENIG S, et al. Theta*: Any-angle path planning on grids[J]. Journal of Artificial Intelligence Research, 2010, 39: 533-579. |
| 18 | NASH A, KOENIG S, TOVEY C. Lazy theta*: Any-angle path planning and path length analysis in 3D[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2010, 24(1): 147-154. |
| 19 | FARIA M, MARÍN R, POPOVIĆ M, et al. Efficient lazy theta* path planning over a sparse grid to explore large 3D volumes with a multirotor UAV[J]. Sensors, 2019, 19(1): 174. |
| 20 | FARIA M, MAZA I, VIGURIA A. Applying frontier cells based exploration and lazy theta* path planning over single grid-based world representation for autonomous inspection of large 3D structures with an UAS[J]. Journal of Intelligent & Robotic Systems, 2019, 93(1): 113-133. |
| 21 | 徐鹏飞, 丁延旭, 曹清波. 基于环境优化的无人艇全局路径规划研究[J]. 中国造船, 2022, 63(5): 206-220. |
| XU P F, DING Y X, CAO Q B. Research on global path planning of unmanned surface vehicle based on environmental optimization[J]. Shipbuilding of China, 2022, 63(5): 206-220 (in Chinese). | |
| 22 | 张耀天, 张旭成, 贾明顺, 等. 基于层次分析法的自适应决策评价方法[J]. 北京航空航天大学学报, 2016, 42(5): 1065-1070. |
| ZHANG Y T, ZHANG X C, JIA M S, et al. Adaptive evaluation method based on analytic hierarchy process[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5): 1065-1070 (in Chinese). | |
| 23 | KIM C, KIM Y, YI H. Fuzzy analytic hierarchy process-based mobile robot path planning[J]. Electronics, 2020, 9(2): 290. |
| [1] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [2] | . Integrated design of an high altitude super long endurance UAV system driven by distributed ground microwave power [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [3] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [4] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [5] | Xin-Yu XU Jian Chen. UAV object tracking for air-ground targets based on status detection and Kalman filter [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [6] | Haiqiao LIU, Meng LIU, Zichao GONG, Jing DONG. A review of image matching methods based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(3): 28796-028796. |
| [7] | . Directional Expelling Attack for Unmanned Aerial Vehicle Swarm with leader-following structure [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [8] | . Cooperative Guidance Technique Considering Flight Safety Constraints of Cluster Wake Vortex Aerodynamic Coupling Effects [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [9] | . Automatic Landing Method for Quad-rotor Helicopter Based on MDP [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [10] | Yuqi CAO, Haoran FU, Fei GAO, Ximin LYU. Trajectory tracking control algorithm for canard⁃equipped tail⁃sitting vertical takeoff and landing UAV based on MPCC [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729950-729950. |
| [11] | Yucheng YAO, Xu LI, Qimin XU, Dong KONG. Instance segmentation for vehicle in UAV aerial images based on feature enhancement and calibration [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328397-328397. |
| [12] | . Vision-based air-to-air multi-UAVs tracking [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [13] | . Coordinated Manned/Unmanned Aerial Warfare: Concepts, Technologies, and Challenges [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [14] | Wenjun DING, Yajun CHAI, Dongdong HOU, Chiyu WANG, Guozong ZHANG, Zhaoyong MAO. Path planning for AUV&UAV cross⁃domain collaborative search and tracking [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 528471-528471. |
| [15] | Ao WU, Huanyu LI, Yangjun GAO, Longfei YUE, Yajie CUI, Rennong YANG. Time-space coordination method for air refueling management for combat air patrol position maintenance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628438-628438. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 380
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 525
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341