Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (16): 331619.doi: 10.7527/S1000-6893.2025.31619
• Electronics and Electrical Engineering and Control • Previous Articles
Yonggang YANG, Wentao JIANG, Zhiyun GAO( )
)
Received:2024-12-06
Revised:2024-12-27
Accepted:2025-03-05
Online:2025-03-19
Published:2025-03-19
Contact:
Zhiyun GAO
E-mail:zygao@cauc.edu.cn
Supported by:CLC Number:
Yonggang YANG, Wentao JIANG, Zhiyun GAO. Real-time target detection algorithm for low altitude UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331619.
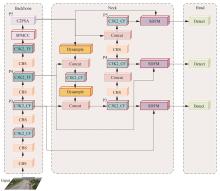
Fig.1
HPRS-YOLO general network structure
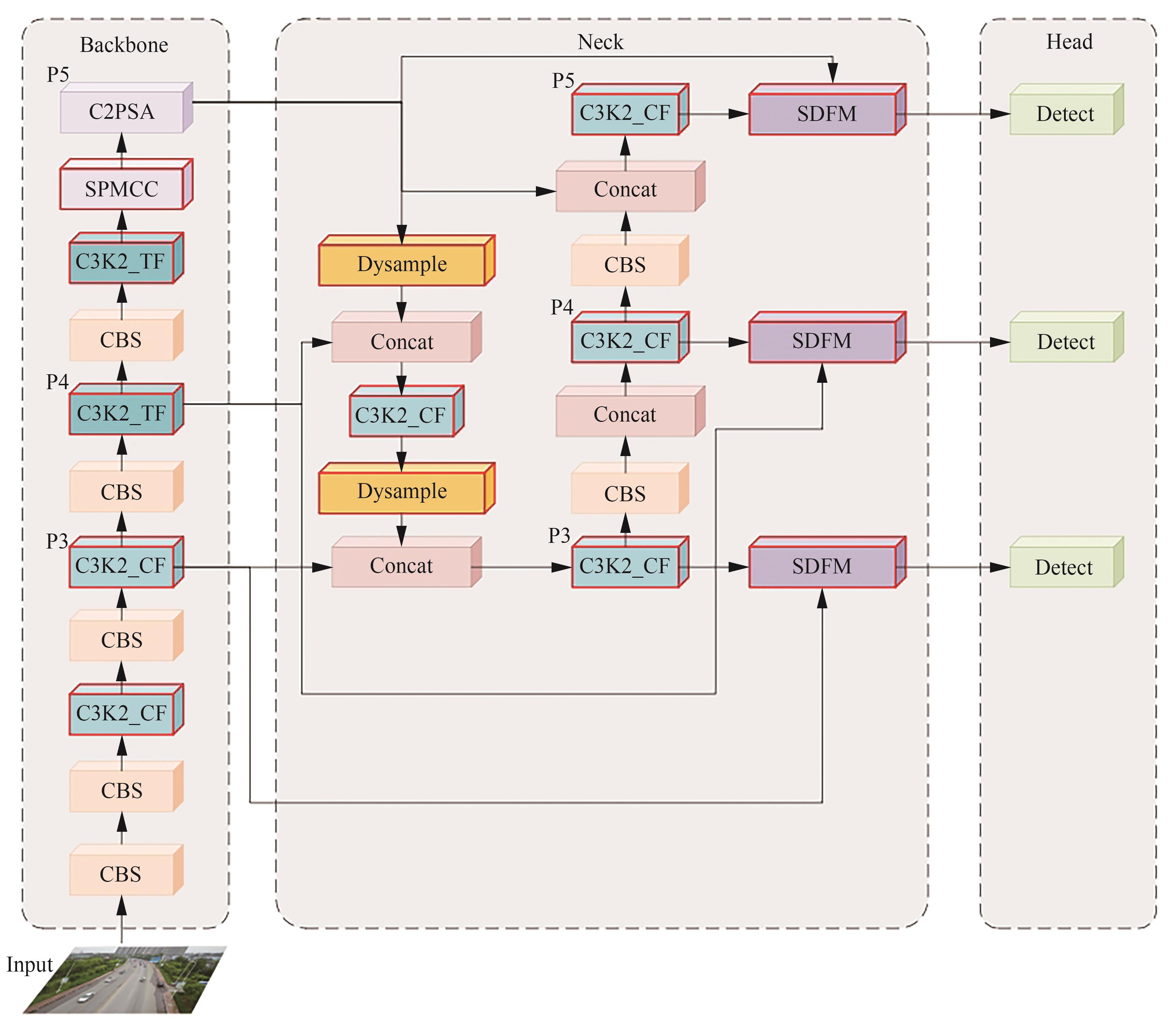
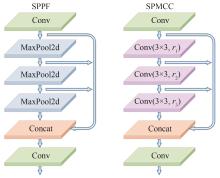
Fig.2
Comparison of SPPF and SPMCC module
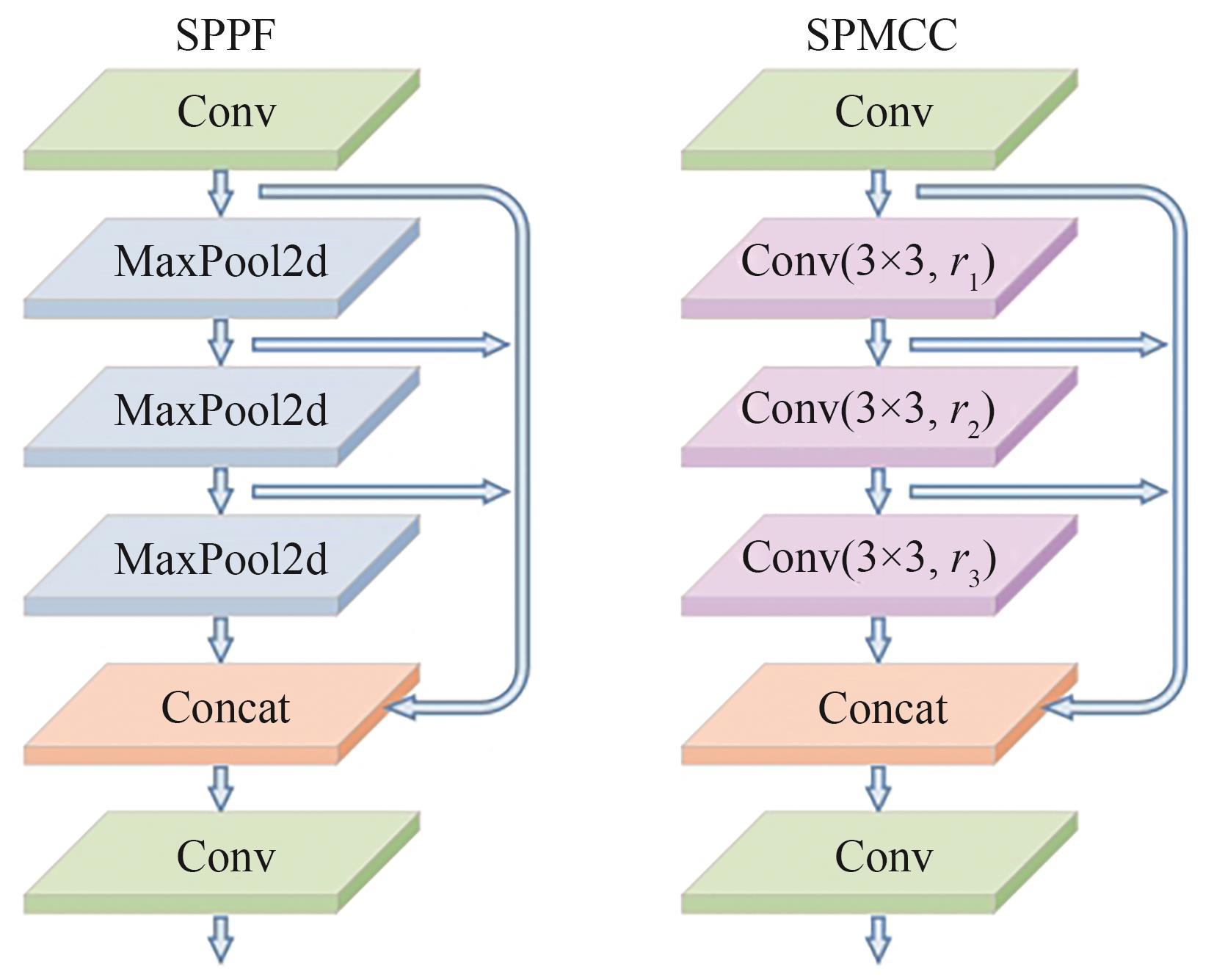
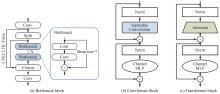
Fig.3
Structures of the modules
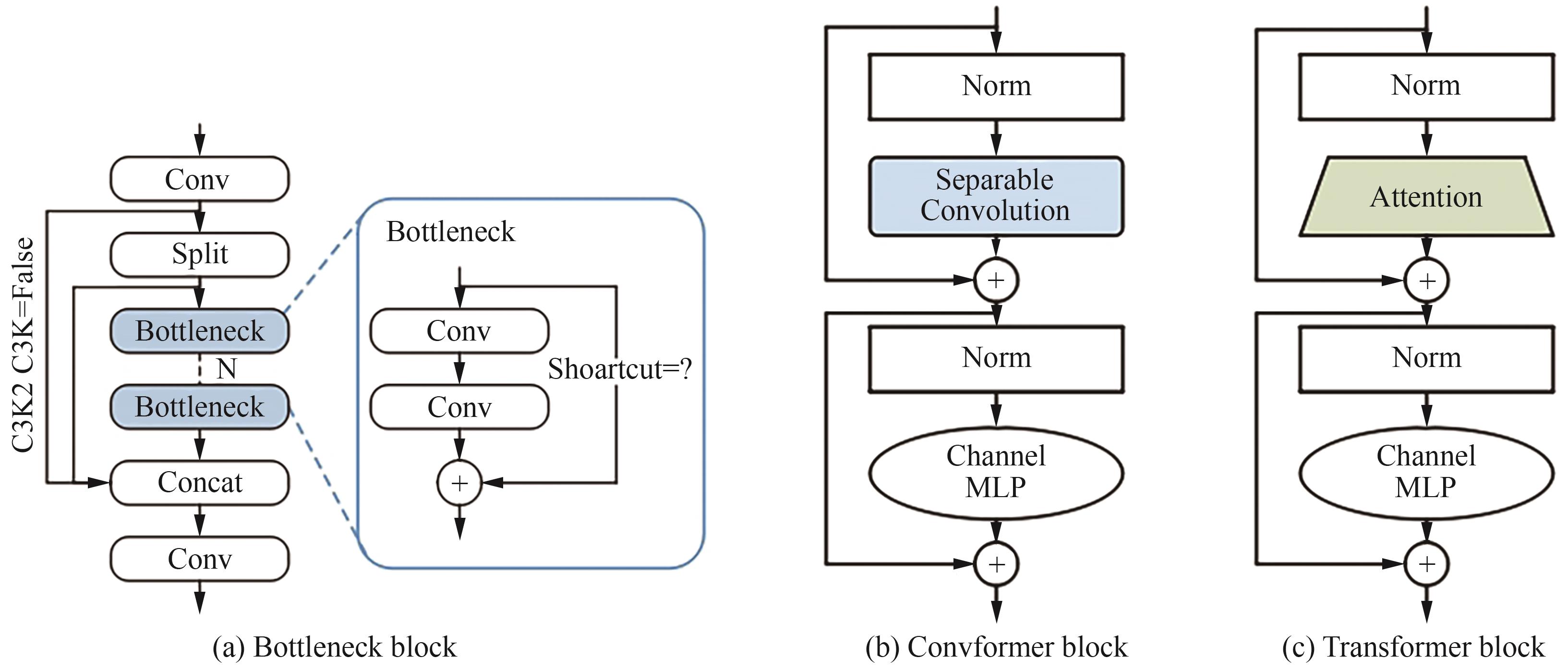

Fig.4
Heat map comparison
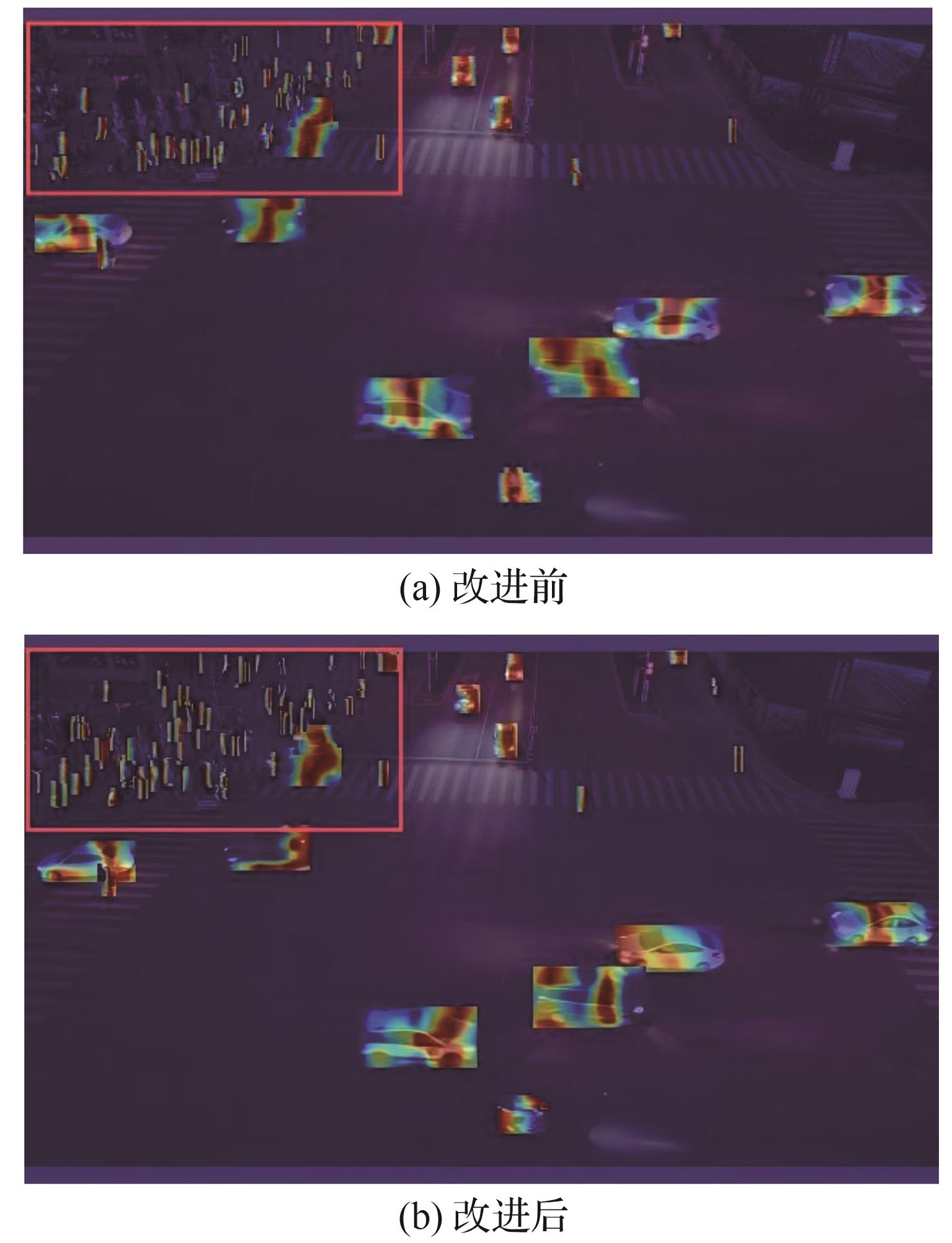
Fig.5
Comparison of depthwise separable convolution and normal convolution plots
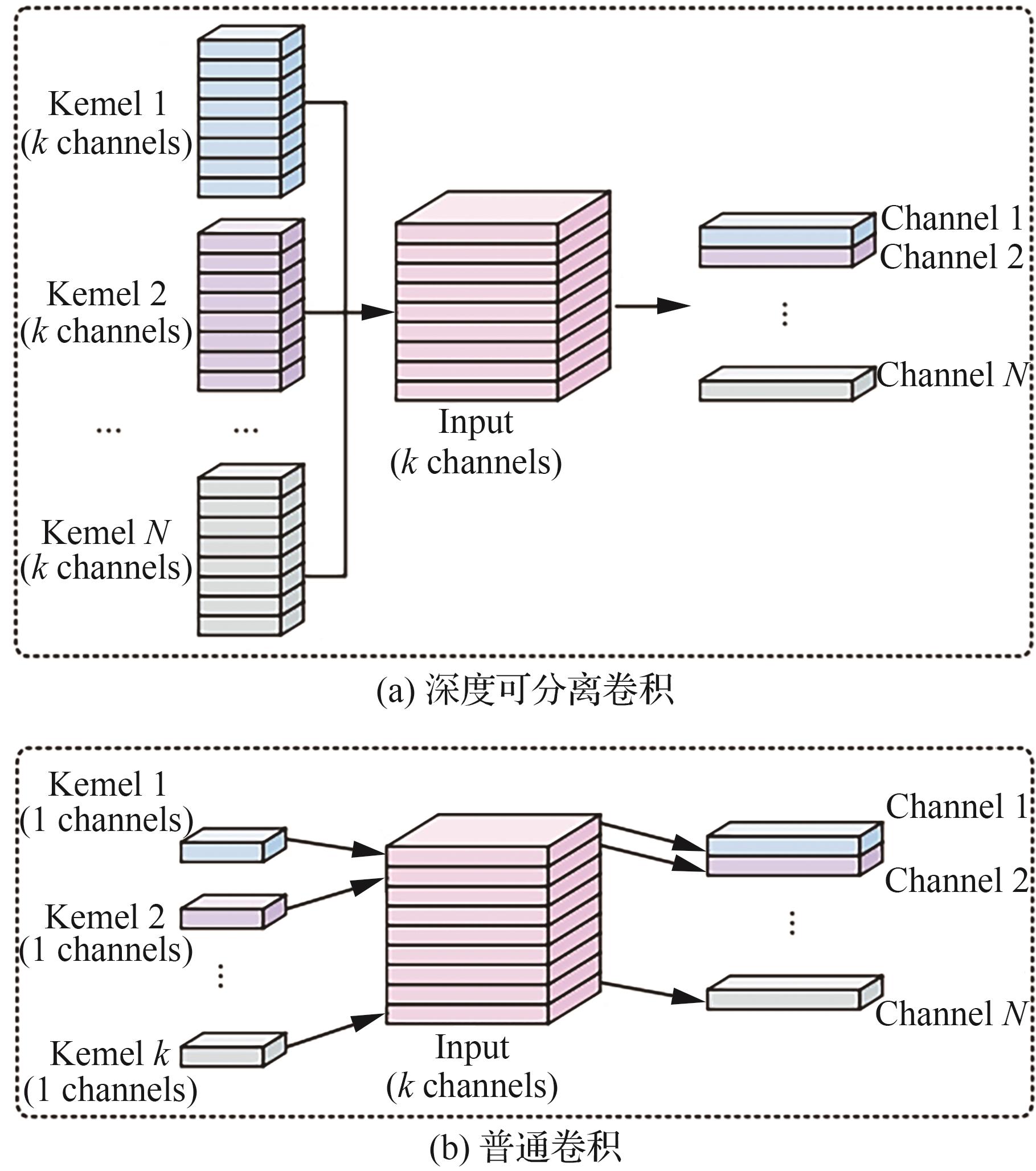
Fig.6
Dynamic upsampling process
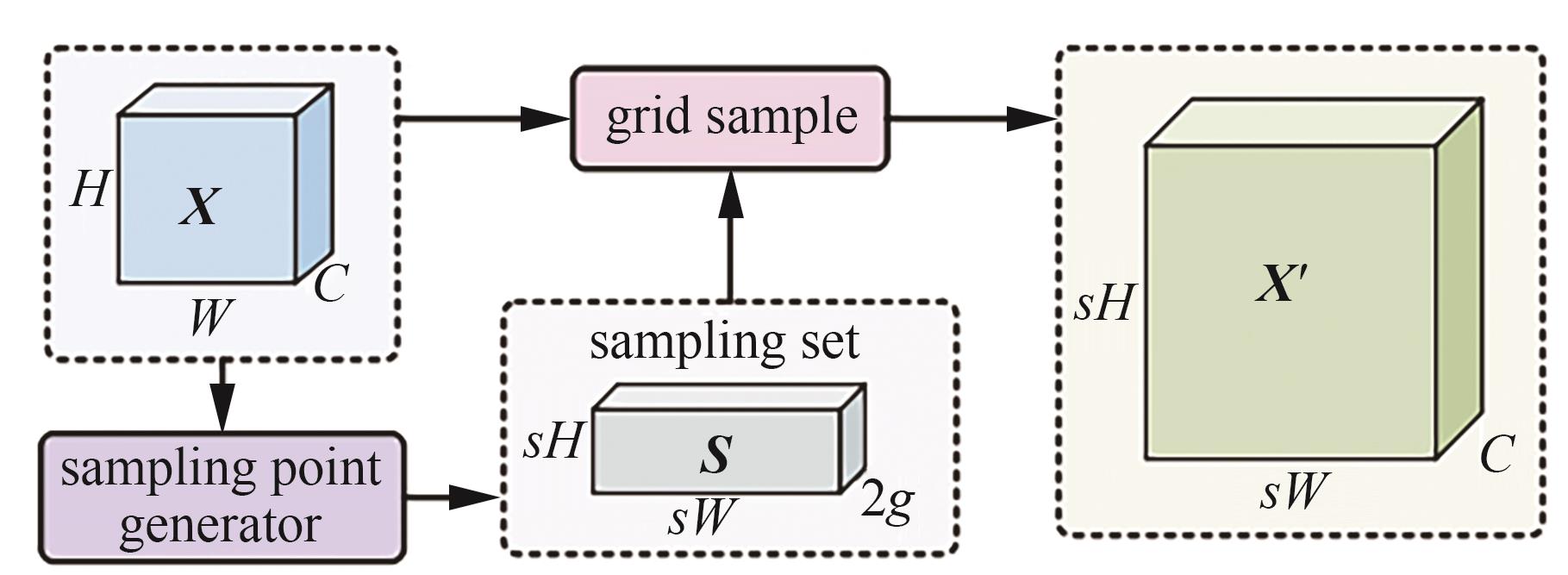
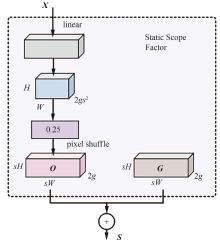
Fig.7
Dynamic upsampling design with static
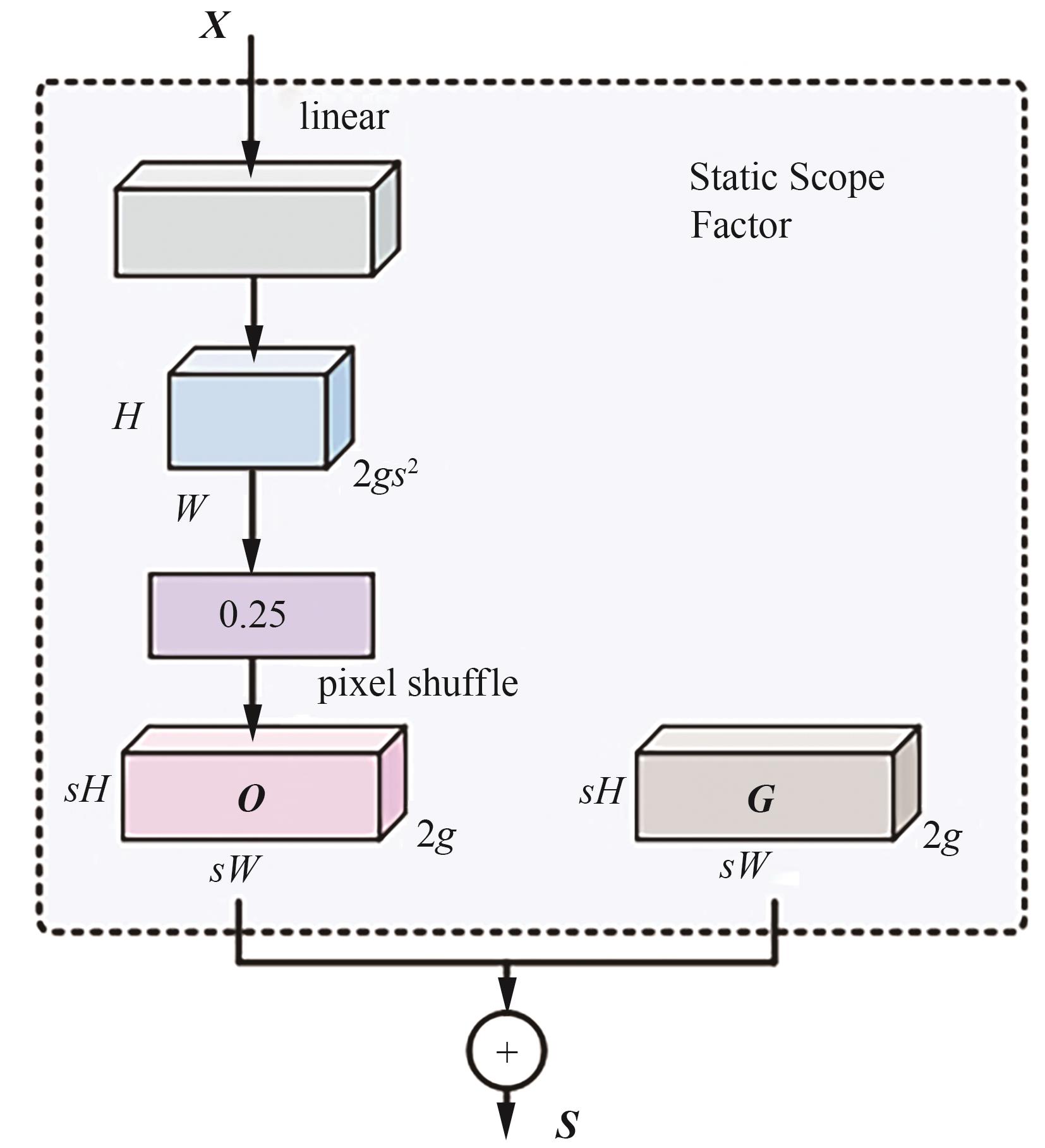

Fig.8
Comparison of feature map visualizations for upsampling module
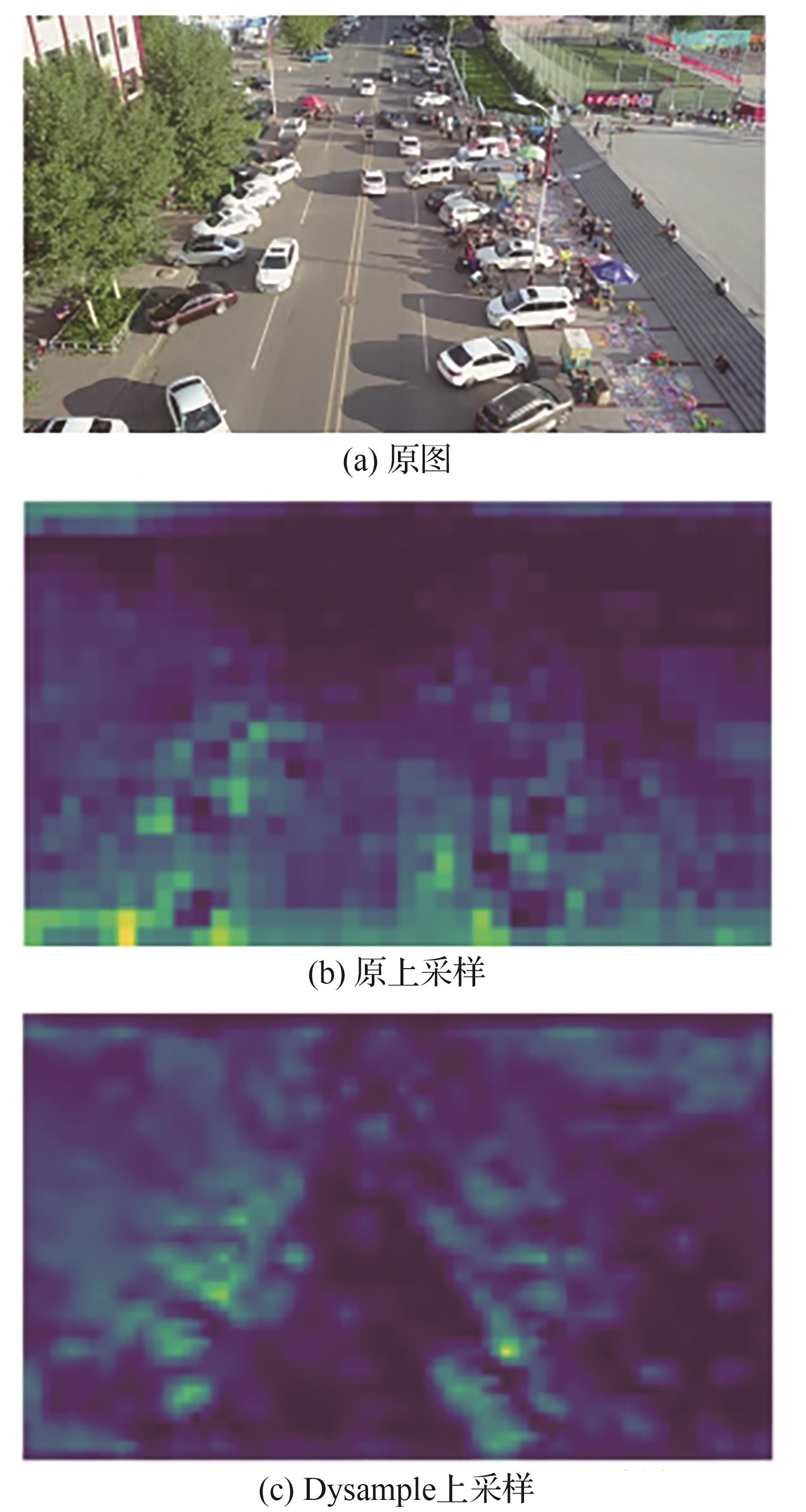
Fig.9
Improved network structure
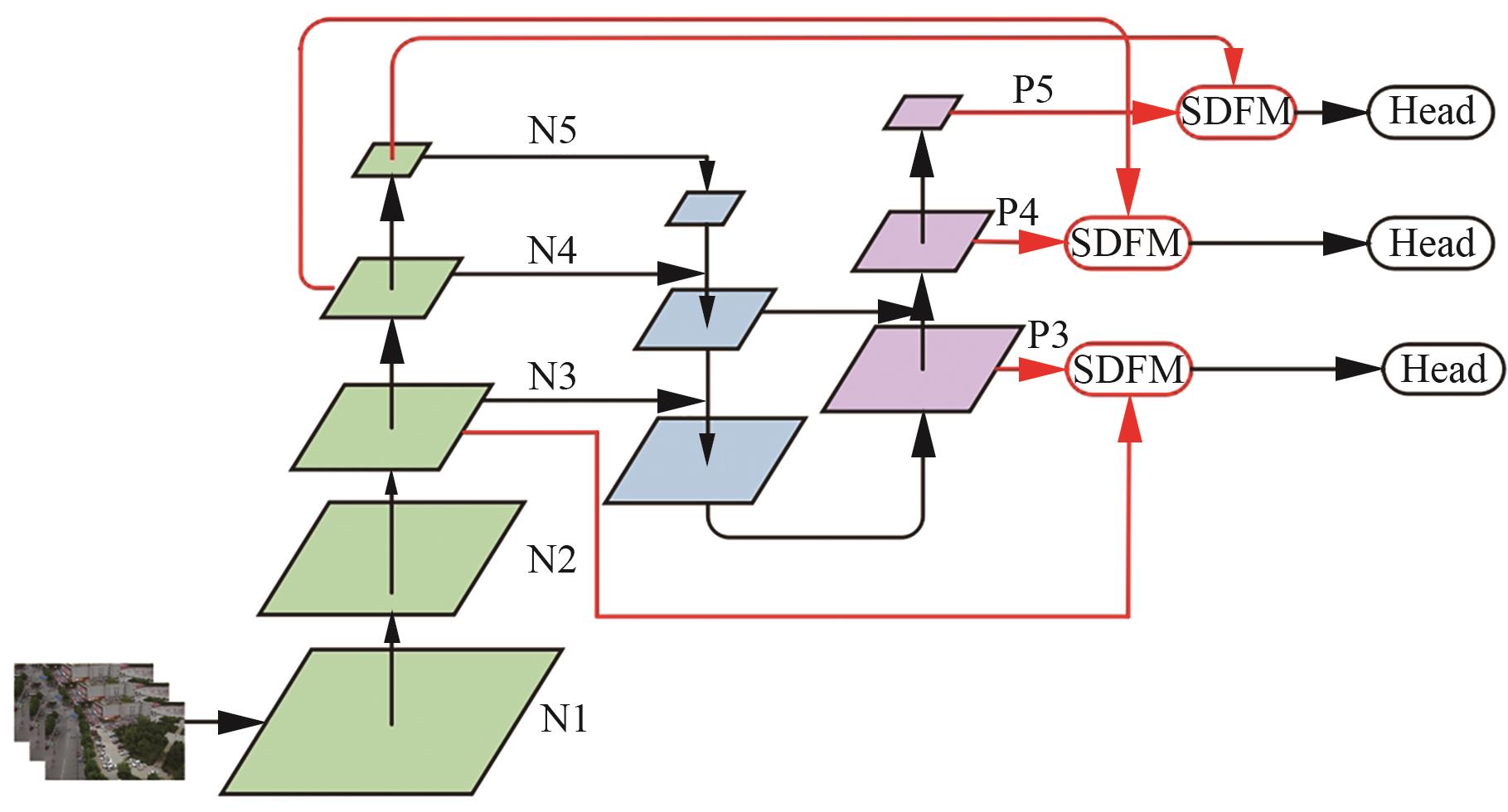
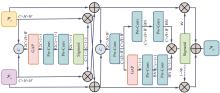
Fig.10
Working principle of SDFM
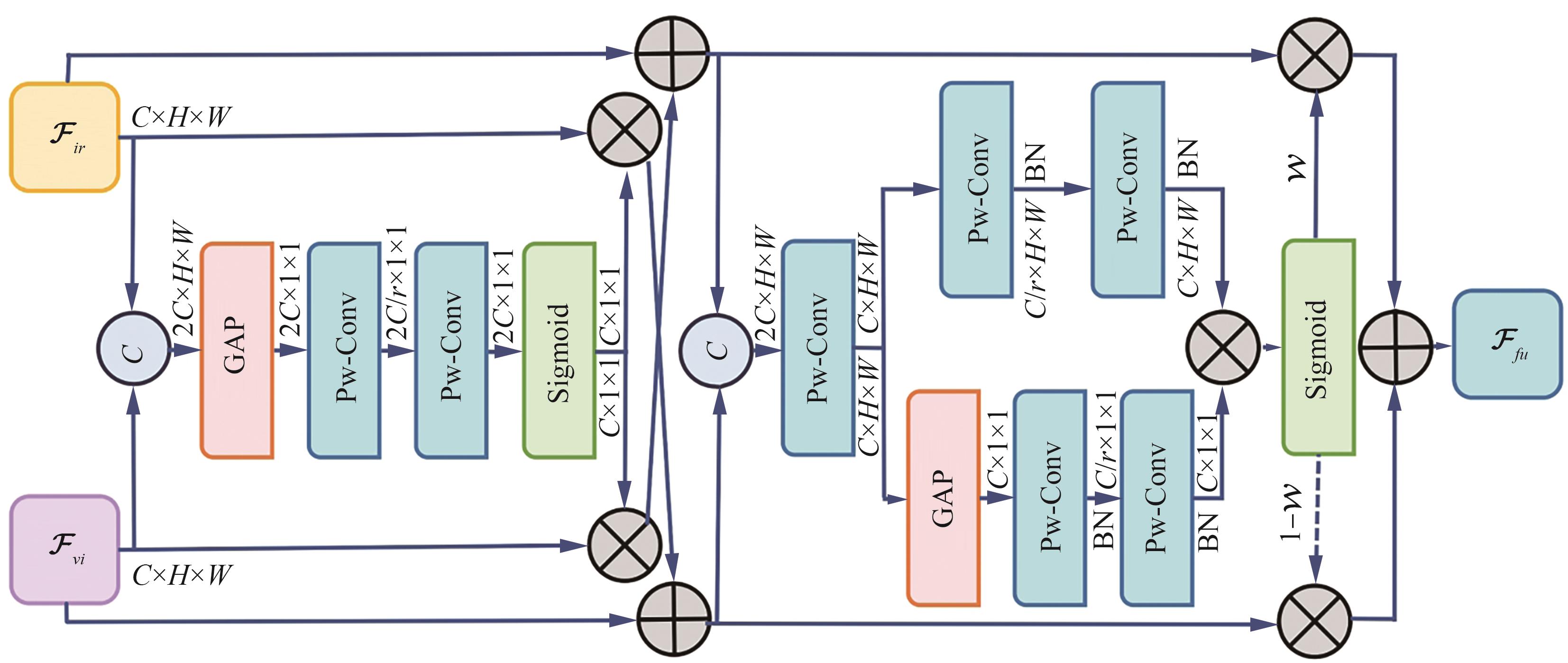
Table 1
C3K2 module ablation
| YOLOv11n | 33.3 | 19.4 | 2.58 | 6.3 | 250 |
| YOLOv11n+B | 34.7 | 20.4 | 2.46 | 6.4 | 232 |
| YOLOv11n+N | 34.0 | 19.8 | 2.53 | 6.4 | 238 |
| YOLOv11n+B+N | 35.8 | 20.9 | 2.42 | 6.5 | 213 |
Table 2
Ablation experiment
| 组别 | SPMCC | 改进C3K2 | Dysample | SDFM | mAP0.5 | mAP0.5∶0.95 | Params/M | P/% | R/% | FLOPs/G | FPS |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 33.3 | 19.4 | 2.58 | 45.0 | 33.1 | 6.3 | 250 | ||||
| 2 | √ | 34.0 | 19.9 | 2.73 | 45.5 | 33.6 | 6.3 | 250 | |||
| 3 | √ | 35.8 | 20.9 | 2.42 | 48.7 | 34.8 | 6.5 | 213 | |||
| 4 | √ | 34.2 | 20.0 | 2.59 | 45.3 | 34.4 | 6.3 | 238 | |||
| 5 | √ | 36.8 | 21.8 | 3.29 | 47.9 | 36.3 | 8.9 | 233 | |||
| 6 | √ | √ | 35.8 | 21.0 | 2.56 | 46.8 | 35.2 | 6.5 | 217 | ||
| 7 | √ | √ | √ | 36.1 | 21.2 | 2.58 | 47.0 | 35.8 | 6.5 | 222 | |
| 8 | √ | √ | √ | √ | 38.4 | 22.7 | 3.30 | 49.9 | 37.1 | 9.3 | 212 |
Table 3
Comparison of detection results of different algorithms on VisDrone dataset
| 模型 | Params/M | P | FPS | |||
|---|---|---|---|---|---|---|
| RetinaNet | 22.1 | 16.6 | 19.8 | 93.7 | 41.3 | 43 |
| YOLOv7-Tiny | 35.4 | 18.9 | 6.00 | 13.3 | 45.9 | 121 |
| Faster-RCNN | 33.5 | 19.3 | 41.2 | 206.6 | 45.7 | 24 |
| SSD | 24.2 | 17.3 | 24.5 | 87.8 | 24.5 | 112 |
| YOLOv5s | 37.9 | 22.7 | 9.11 | 23.7 | 50.1 | 133 |
| YOLOv8n | 31.9 | 18.4 | 3.00 | 8.1 | 43.2 | 232 |
| YOLOXS[ | 35.2 | 19.6 | 8.94 | 26.78 | 40 | |
| YOLOv10n | 31.7 | 18.4 | 2.71 | 8.4 | 43.3 | 241 |
| YOLOv11n | 33.3 | 19.4 | 2.58 | 6.3 | 33.1 | 250 |
| Drone-YOLO[ | 38.1 | 22.7 | 3.05 | |||
| LUDY-N[ | 35.2 | 2.81 | 47.0 | 218 | ||
| HPRS-YOLO | 38.4 | 22.7 | 3.30 | 9.3 | 49.9 | 212 |
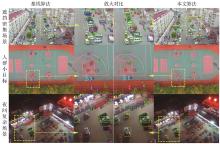
Fig. 11
Comparison of detection results in multiple scenarios
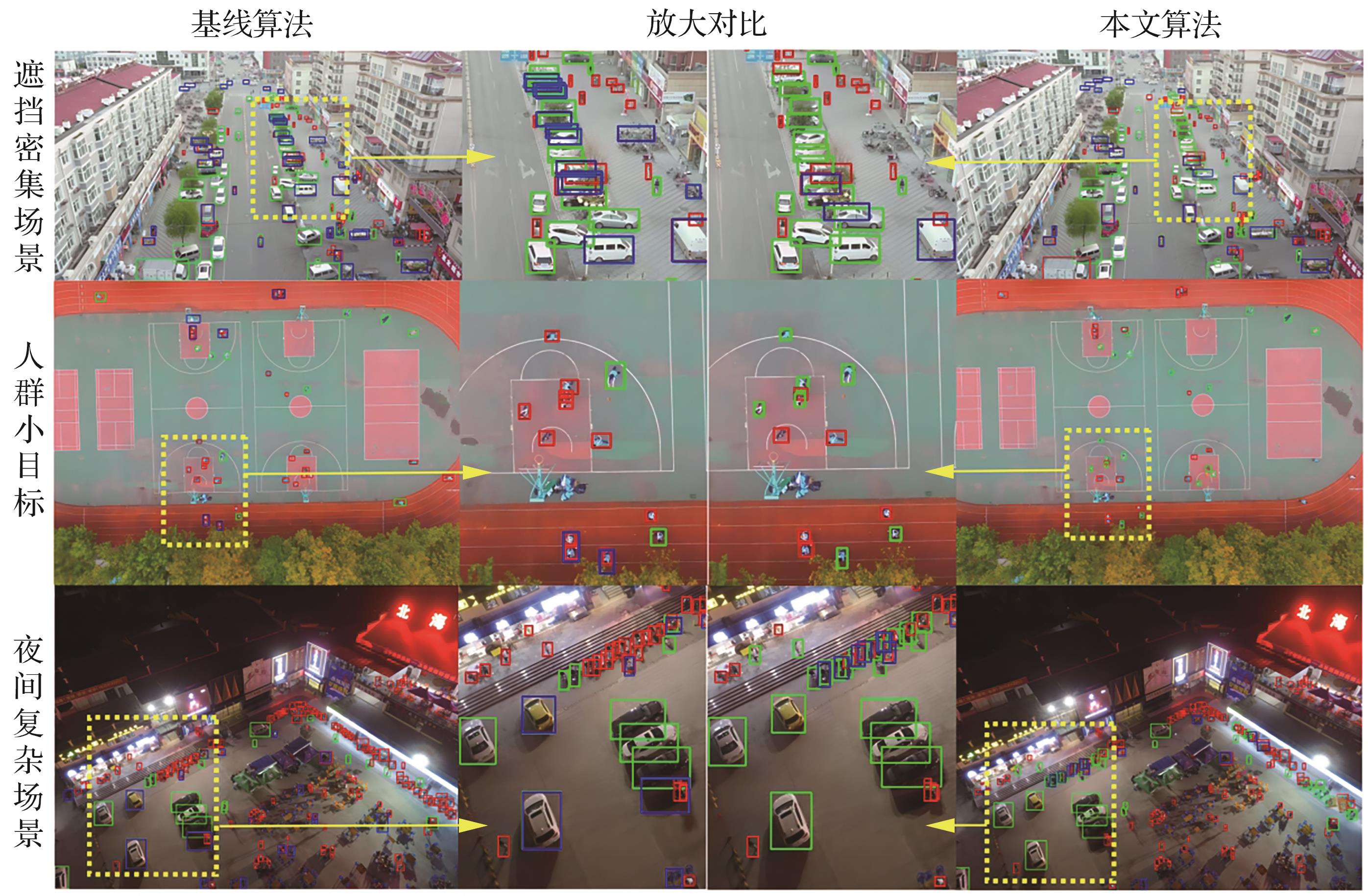
Table 4
Comparison results on DOTA datasets
| 模型 | mAP0.5 | mAP0.5∶0.95 | Params/M | FLOPs/G |
|---|---|---|---|---|
| YOLOv5n | 62.5 | 35.9 | 1.8 | 4.2 |
| YOLOv6n | 58.8 | 36.5 | 4.6 | 11.3 |
| YOLOv7-tiny | 66.0 | 39.3 | 6.0 | 13.1 |
| YOLOv8n | 65.6 | 42.3 | 3.0 | 8.1 |
| YOLOv11n | 67.7 | 45.2 | 2.58 | 6.3 |
| DAMO-YOLO[ | 69.6 | 45.6 | 16.4 | 38.2 |
| HPRS-YOLO | 69.7 | 45.8 | 3.3 | 9.3 |
Table 5
Embedded platform parameters & environment
| 项目 | 技术参数 |
|---|---|
| 名称 | Jetson AGX Orin 64 GB Developer Kit |
| 显存 | 64 GB 256-bit LPDDR5 |
| CPU | 12-core Arm Cortex-A78AE 64-bit 2.2 GHz |
| GPU | NVIDIA Ampere architecture |
| 系统 | Ubuntu 20.04 |
| 环境 | Python 3.8.10、Torch 1.12.0、Cuda 11.4 |
Table 6
Jetson AGX Orin platform experimental results
| 模型 | 精度 校准 | mAP0.5 | mAP0.5∶0.95 | Params/M | FPS |
|---|---|---|---|---|---|
| YOLOv11n | 无 | 33.3 | 19.4 | 2.58 | 24 |
| FP32 | 33.3 | 19.4 | 2.58 | 76 | |
| FP16 | 33.2 | 19.4 | 2.58 | 99 | |
| HPRS-YOLO | 无 | 38.4 | 22.7 | 3.3 | 15 |
| FP32 | 38.5 | 22.7 | 3.3 | 46 | |
| FP16 | 38.4 | 22.6 | 3.3 | 60 |
| [1] | 王强, 吴乐天, 王勇, 等. 基于关键点检测的红外弱小目标检测[J]. 航空学报, 2023, 44(10): 328173. |
| WANG Q, WU L T, WANG Y, et al. An infrared small target detection method based on key point[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(10): 328173 (in Chinese). | |
| [2] | SHIN G, YOOUN H, SHIN D, et al. Incremental learning method for cyber intelligence, surveillance, and reconnaissance in closed military network using converged IT techniques[J]. Soft Computing, 2018, 22(20): 6835-6844. |
| [3] | LI A, SUN S J, ZHANG Z Y, et al. A multi-scale traffic object detection algorithm for road scenes based on improved YOLOv5[J]. Electronics, 2023, 12(4): 878. |
| [4] | BHADRA S, SAGAN V, SARKAR S, et al. PROSAIL-Net: A transfer learning-based dual stream neural network to estimate leaf chlorophyll and leaf angle of crops from UAV hyperspectral images[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2024, 210: 1-24. |
| [5] | MARTINEZ-ALPISTE I, GOLCARENARENJI G, WANG Q, et al. Search and rescue operation using UAVs: A case study[J]. Expert Systems with Applications, 2021, 178: 114937. |
| [6] | DUO C H, LI Y Q, GONG W W, et al. UAV-aided distribution line inspection using double-layer offloading mechanism[J]. IET Generation, Transmission & Distribution, 2024, 18(13): 2353-2372. |
| [7] | DAI J, LI Y, HE K, et al. R-FCN: Object detection via region-based fully convolutional networks[C]∥Proceedings of the 30th International Conference on Neural Information Processing Systems. New York: Curran Associates Inc, 2016:379-387. |
| [8] | GIRSHICK R. Fast R-CNN[DB/OL]. arXiv preprint:1504.08083, 2015. |
| [9] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016: 779-788. |
| [10] | AGRAWAL N, PRABHAKARAN V, WOBBER T, et al. Design tradeoffs for SSD performance[C]∥USENIX 2008 Annual Technical Conference. Berkeley: USENIX Association, 2008: 57-70. |
| [11] | 冒国韬, 邓天民, 于楠晶. 基于多尺度分割注意力的无人机航拍图像目标检测算法[J]. 航空学报, 2023, 44(5): 326738. |
| MAO G T, DENG T M, YU N J. Object detection in UAV images based on multi-scale split attention[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(5): 326738 (in Chinese). | |
| [12] | 罗旭东, 吴一全, 陈金林. 无人机航拍影像目标检测与语义分割的深度学习方法研究进展[J]. 航空学报, 2024, 45(6): 028822. |
| LUO X D, WU Y Q, CHEN J L. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 028822 (in Chinese). | |
| [13] | CHEN P L, WANG J T, ZHANG Z W, et al. CSPGNet: Cross-scale spatial perception guided network for tiny object detection in remote sensing images[J]. Digital Signal Processing, 2024, 154: 104674. |
| [14] | LUO X D, WU Y Q, ZHAO L Y. YOLOD: A target detection method for UAV aerial imagery[J]. Remote Sensing, 2022, 14(14): 3240. |
| [15] | XUE C, XIA Y L, WU M J, et al. EL-YOLO: An efficient and lightweight low-altitude aerial objects detector for onboard applications[J]. Expert Systems with Applications, 2024, 256: 124848. |
| [16] | ZHANG H, SUN W, SUN C H, et al. HSP-YOLOv8: UAV aerial photography small target detection algorithm[J]. Drones, 2024, 8(9): 453. |
| [17] | XIAO X, XUE X R, ZHAO Z Y, et al. A recursive prediction-based feature enhancement for small object detection[J]. Sensors, 2024, 24(12): 3856. |
| [18] | ZHAO L L, ZHU M L. MS-YOLOv7: YOLOv7 based on multi-scale for object detection on UAV aerial photography[J]. Drones, 2023, 7(3): 188. |
| [19] | WANG L Y, TIEN A. Aerial image object detection with vision transformer detector (ViTDet)[C]∥IGARSS 2023-2023 IEEE International Geoscience and Remote Sensing Symposium. Piscataway: IEEE Press, 2023: 6450-6453. |
| [20] | YU W H, LUO M, ZHOU P, et al. MetaFormer is actually what you need for vision[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 10809-10819. |
| [21] | VASWANI A. Attention is all you need[C]∥Proceedings of the 31st International Conference on Neural Information Processing Systems. New York: Curran Associates Inc, 2017: 6000-6010. |
| [22] | YU W H, SI C Y, ZHOU P, et al. MetaFormer baselines for vision[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 46(2): 896-912. |
| [23] | LIU W Z, LU H, FU H T, et al. Learning to upsample by learning to sample[C]∥2023 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2023: 6004-6014. |
| [24] | TANG L F, ZHANG H, XU H, et al. Rethinking the necessity of image fusion in high-level vision tasks: A practical infrared and visible image fusion network based on progressive semantic injection and scene fidelity[J]. Information Fusion, 2023, 99: 101870. |
| [25] | YU F, KOLTUN V. Multi-scale context aggregation by dilated convolutions[DB/OL]. arXiv preprint: 1511.07122,2015. |
| [26] | WANG P Q, CHEN P F, YUAN Y, et al. Understanding convolution for semantic segmentation[C]∥2018 IEEE Winter Conference on Applications of Computer Vision (WACV). Piscataway: IEEE Press, 2018: 1451-1460. |
| [27] | ALEXEY D. An image is worth 16×16 words: Transformers for image recognition at scale[DB/OL]. arXiv preprint: 2010.11929, 2020. |
| [28] | HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 7132-7141. |
| [29] | WOO S, PARK J, LEE J Y, et al. CBAM: Convolutional block attention module[C]∥Computer Vision- ECCV 2018. Cham: Springer International Publishing, 2018: 3-19. |
| [30] | CHOLLET F. Xception: Deep learning with depthwise separable convolutions[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2017: 1800-1807. |
| [31] | MAMALET F, GARCIA C. Simplifying ConvNets for fast learning[C]∥Artificial Neural Networks and Machine Learning-ICANN 2012. Heidelberg: Springer Berlin Heidelberg, 2012: 58-65. |
| [32] | DU D W, WEN L Y, ZHU P F, et al. VisDrone-DET2020: The vision meets drone object detection in image challenge results[C]∥Computer Vision-ECCV 2020 Workshops. Cham: Springer International Publishing, 2020: 692-712. |
| [33] | XIA G S, BAI X, DING J, et al. DOTA: A large-scale dataset for object detection in aerial images[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 3974-3983. |
| [34] | LIU Z H, WU X, ZHANG L Y, et al. LightYOLO-S: A lightweight algorithm for detecting small targets[J]. Journal of Real-Time Image Processing, 2024, 21(4): 111. |
| [35] | ZHANG Z X. Drone-YOLO: An efficient neural network method for target detection in drone images[J]. Drones, 2023, 7(8): 526. |
| [36] | FAN Q S, LI Y T, DEVECI M, et al. LUD-YOLO: A novel lightweight object detection network for unmanned aerial vehicle[J]. Information Sciences, 2025, 686: 121366. |
| [37] | ZHANG Z X. Drone-YOLO: An efficient neural network method for target detection in drone images[J]. Drones, 2023, 7(8): 526. |
| [1] | Danlong SONG, Yuanhao WANG, Keyi HUA, Chunhua DU, Yanchao ZHANG, Yunjuan JING. Multi-scale study of radial stiffness characteristics of plain C/C composite finger seals [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(7): 430878-430878. |
| [2] | Chen LIU, Chen HE, Wenming GAO, Xianfeng WANG, Lin JIANG, Shuo CHENG, Yong LI, Jun XIAO. Dual scale ply design of composite aircraft auxiliary fuel tank [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 230541-230541. |
| [3] | Shaoyi LI, Yaqi ZHANG, Yue CHENG, Xi YANG, Liang ZHANG, Jian LIN, Zhongjie MENG. Scene abstract semantic synthesis model and its application in infrared dim and small target detection [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 630702-630702. |
| [4] | Aoze YU, Weiwei WEI, Ping WANG, Jinqiang ZHANG, Wenxiong KE. Small target detection algorithm for UAV based on patch⁃wise co⁃attention [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 629148-629148. |
| [5] | Xiao WANG, Zhenbao LIU. Infrared small target detection based on multi⁃layer multi⁃direction transformer [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 629490-629490. |
| [6] | Yanfang LIU, Jiayu SHE, Qiufan YUAN, Rui ZHOU, Naiming QI. Real⁃time small target detection networks for UAV remote sensing [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 630119-630119. |
| [7] | Xinlin XIAO, Weichao SHI, Xiangtao ZHENG, Yueming GAO, Xiaoqiang LU. Multiple models collaboration for ship detection [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 630241-630241. |
| [8] | Dinghua ZHANG, Zhiwei HE, Xuebao ZHANG, Ming LUO. Influence of blade multi-scale surface on aerodynamic performance of compressor and its high-performance manufacturing: A review [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 629642-629642. |
| [9] | Shaoping ZHANG, Huiming GUO, Tong GAO, Weihong ZHANG. Design and manufacturing method of multi-scale integrated load bearing thin-walled structure for application in next-generation aeroengine based on advanced laser processing technology [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 630037-630037. |
| [10] | Weihong ZHANG, Han ZHOU, Shaoying LI, Jihong ZHU, Lu ZHOU. Material⁃structure integrated design for high⁃performance aerospace thin⁃walled component [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 627428-627428. |
| [11] | Bin LIU, Jing XU, Meiling HUO, Xueying CUI, Xiufeng XIE, Donghui YANG, Jia WANG. Remaining useful life prediction based on multi-scale adaptive attention network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 226918-226918. |
| [12] | Xiaoqian CHEN, Yong ZHAO, Senlin HUO, Zeyu ZHANG, Bingxiao DU. A review of topology optimization design methods for multi-scale structures [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528863-528863. |
| [13] | Qiang WANG, Letian WU, Yong WANG, Huan WANG, Wankou YANG. An infrared small target detection method based on key point [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 328173-328173. |
| [14] | Yuanliang XUE, Guodong JIN, Lining TAN, Jiankun XU. Adaptive UAV target tracking algorithm based on multi-scale fusion [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 326107-326107. |
| [15] | Yifeng HUANG, Shuhua ZENG, Zhongzheng JIANG, Weifang CHEN. Numerical study on high-altitude lateral jet based on nonlinear coupled constitutive relation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S2): 8-22. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341