Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (11): 531349.doi: 10.7527/S1000-6893.2024.31349
• Articles • Previous Articles
Ziyi ZONG1, Xin DONG2( ), Zhan TU3, Jinwu XIANG1,4
), Zhan TU3, Jinwu XIANG1,4
Received:2024-10-08
Revised:2024-11-04
Accepted:2024-12-10
Online:2024-12-18
Published:2024-12-18
Contact:
Xin DONG
E-mail:xindong324@buaa.edu.cn
Supported by:CLC Number:
Ziyi ZONG, Xin DONG, Zhan TU, Jinwu XIANG. Countermeasures against uncooperative drones based on swarm encirclement[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531349.
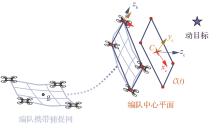
Fig.1
Simplification of formation of drones carrying capture net into the formation-center plane
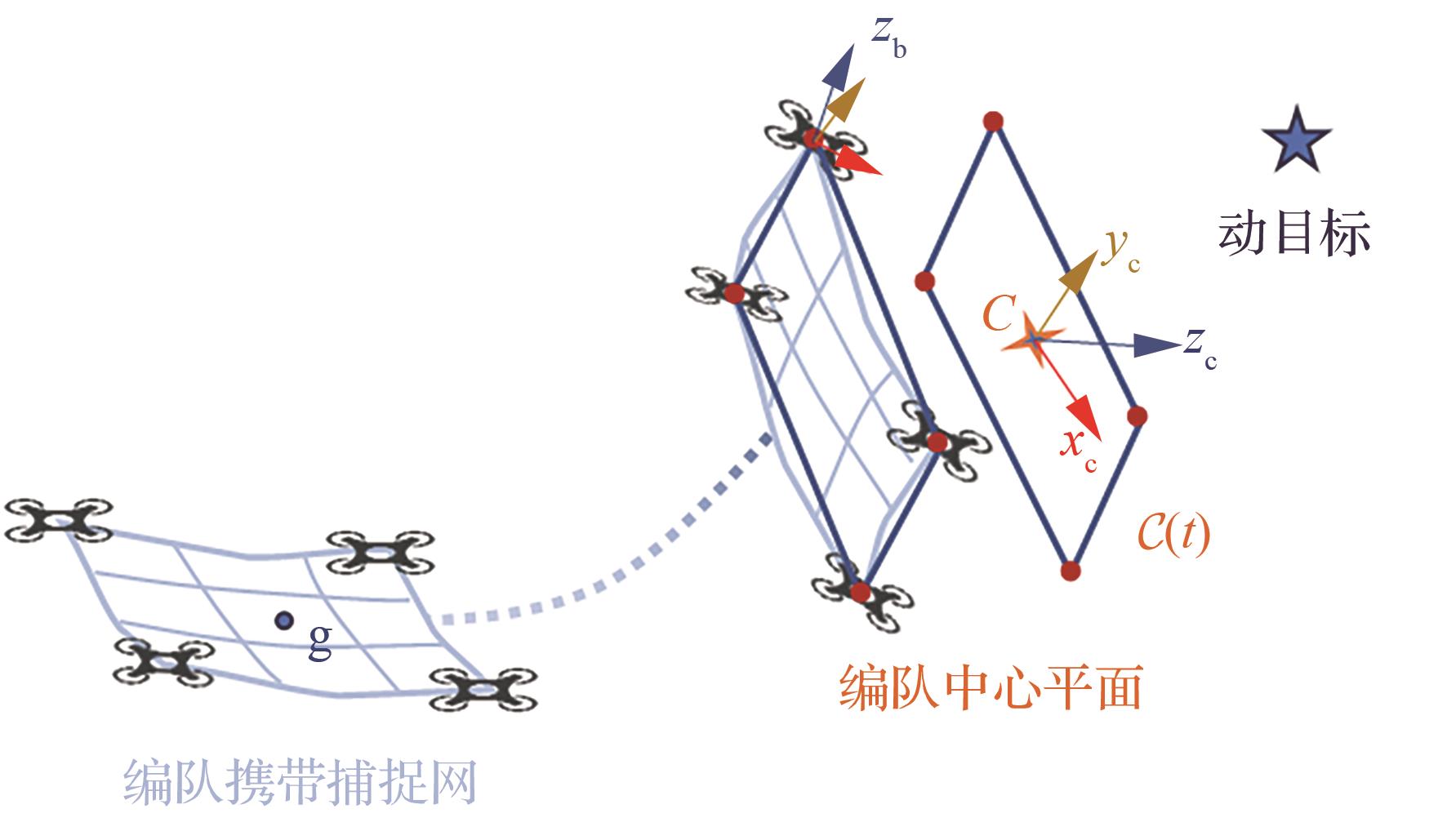
Fig.2
Moving target remaining within the field of view of the drone formation
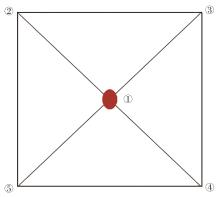
Fig.3
Simplified undirected graph representing the formation system
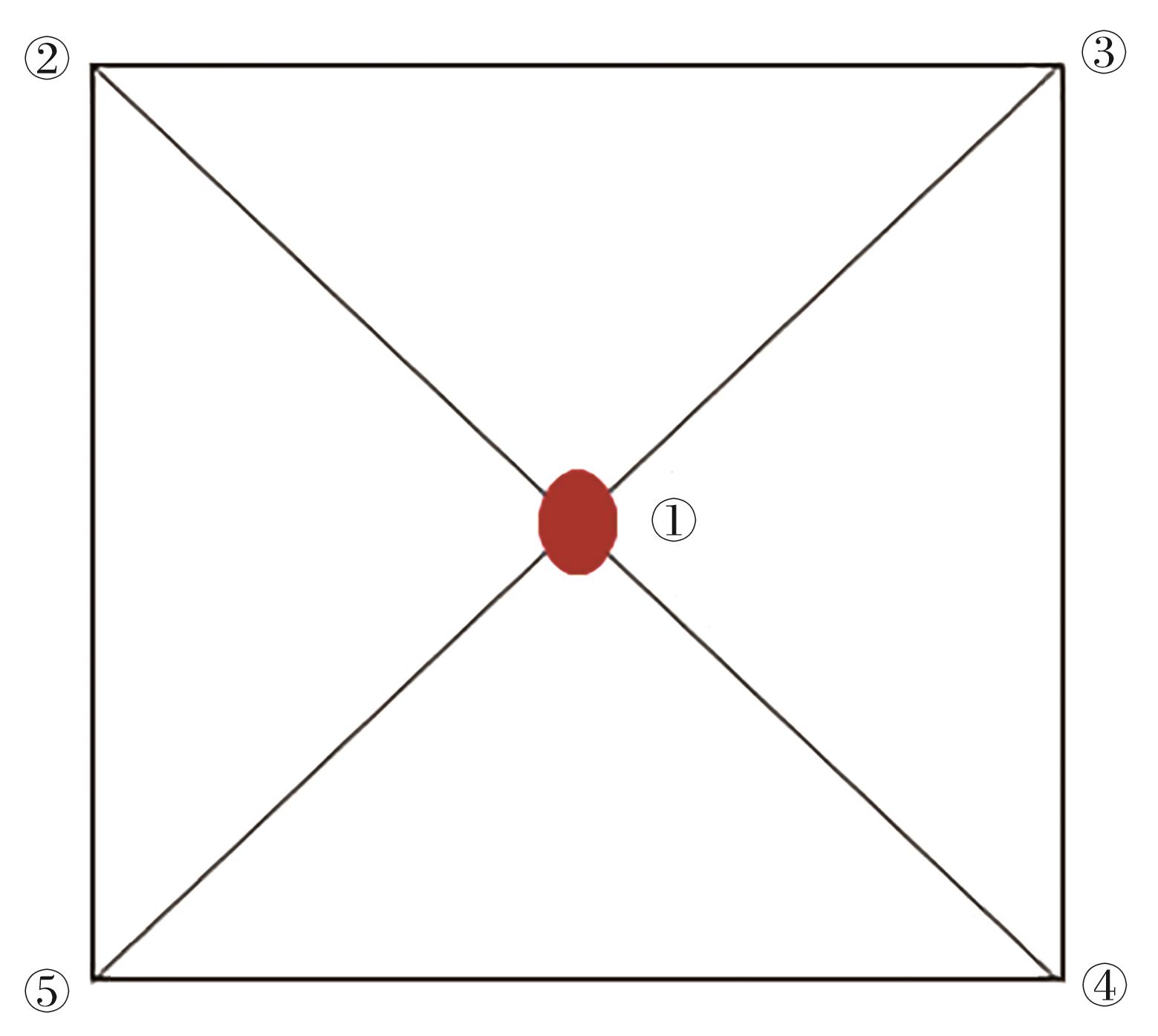
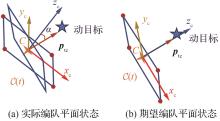
Fig.4
Rotate the formation plane to align the moving target with the formation center
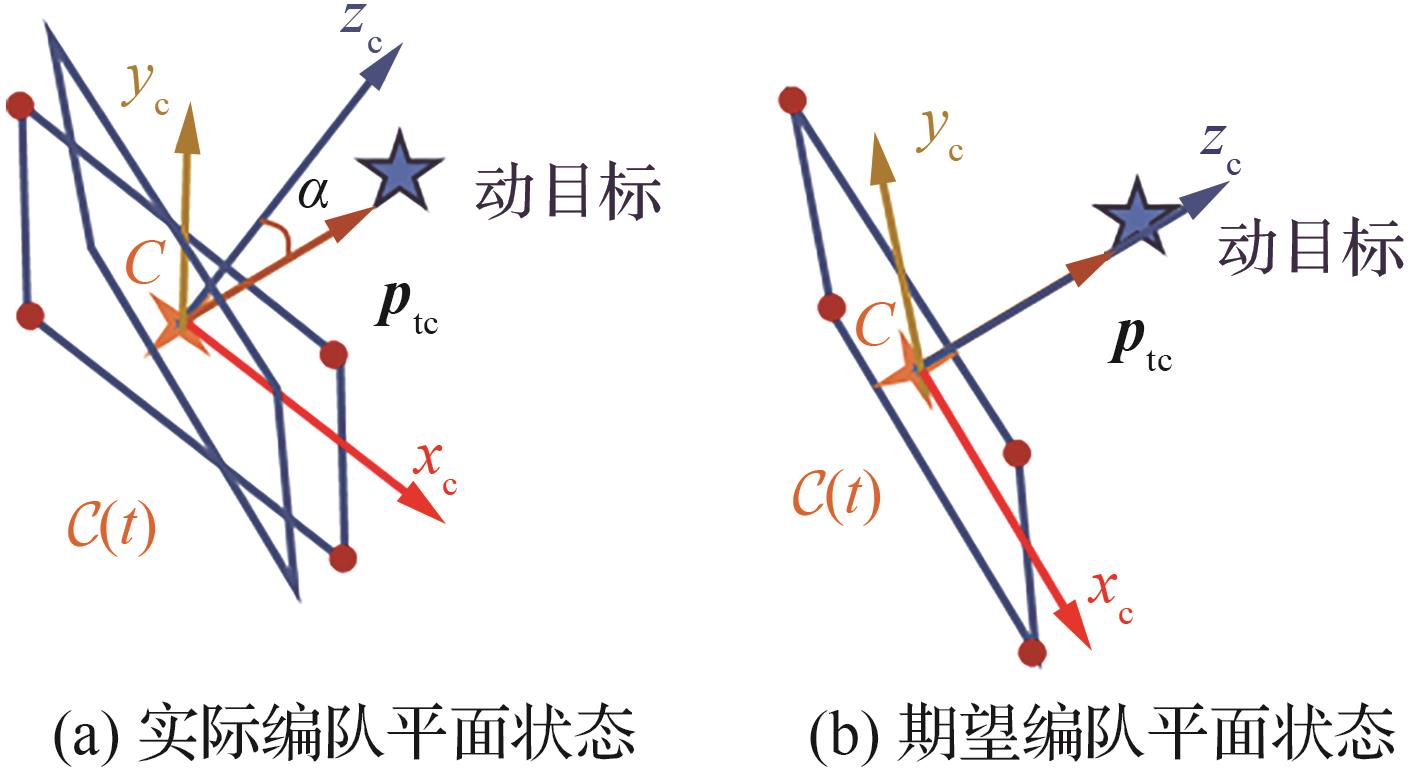
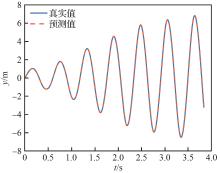
Fig.5
Comparison of predicted trajectory of a moving target with ground truth
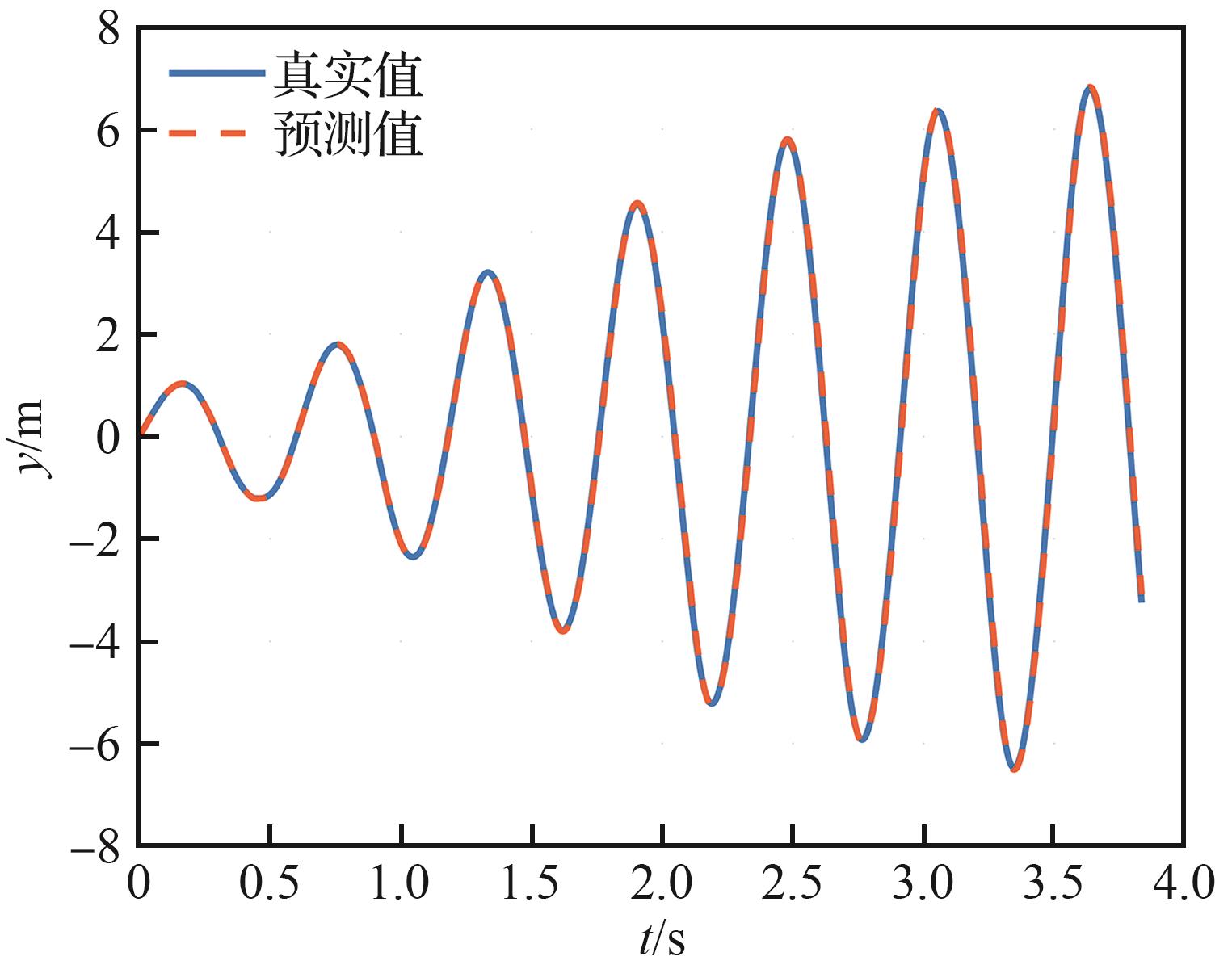
Fig.6
Drones formation following virtual leader to do “8-shaped” movement

Fig.7
Drones formation passing the area with dense obstacles to round up targets
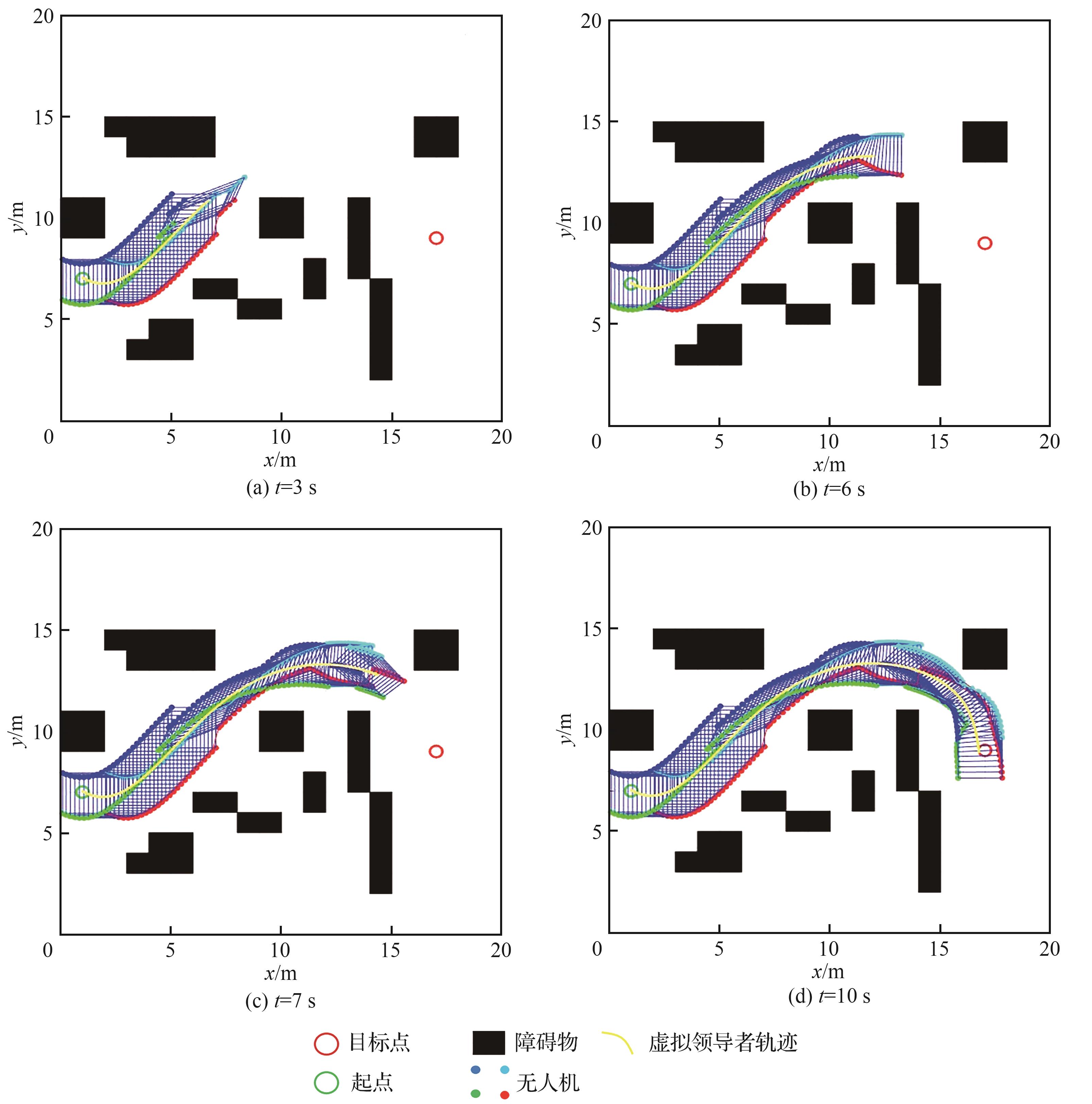

Fig.8
Drones formation pursuing moving target in three-dimensional space
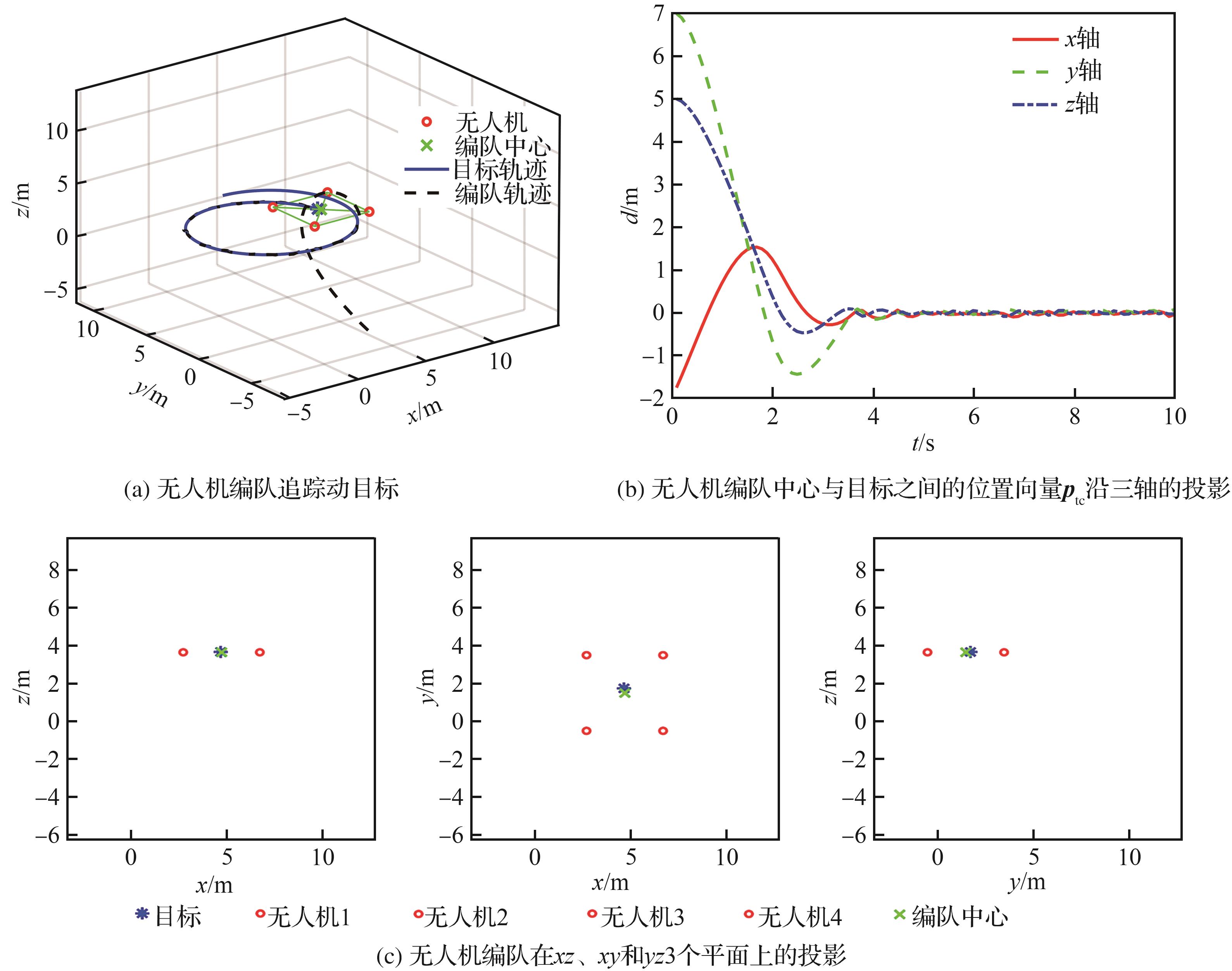

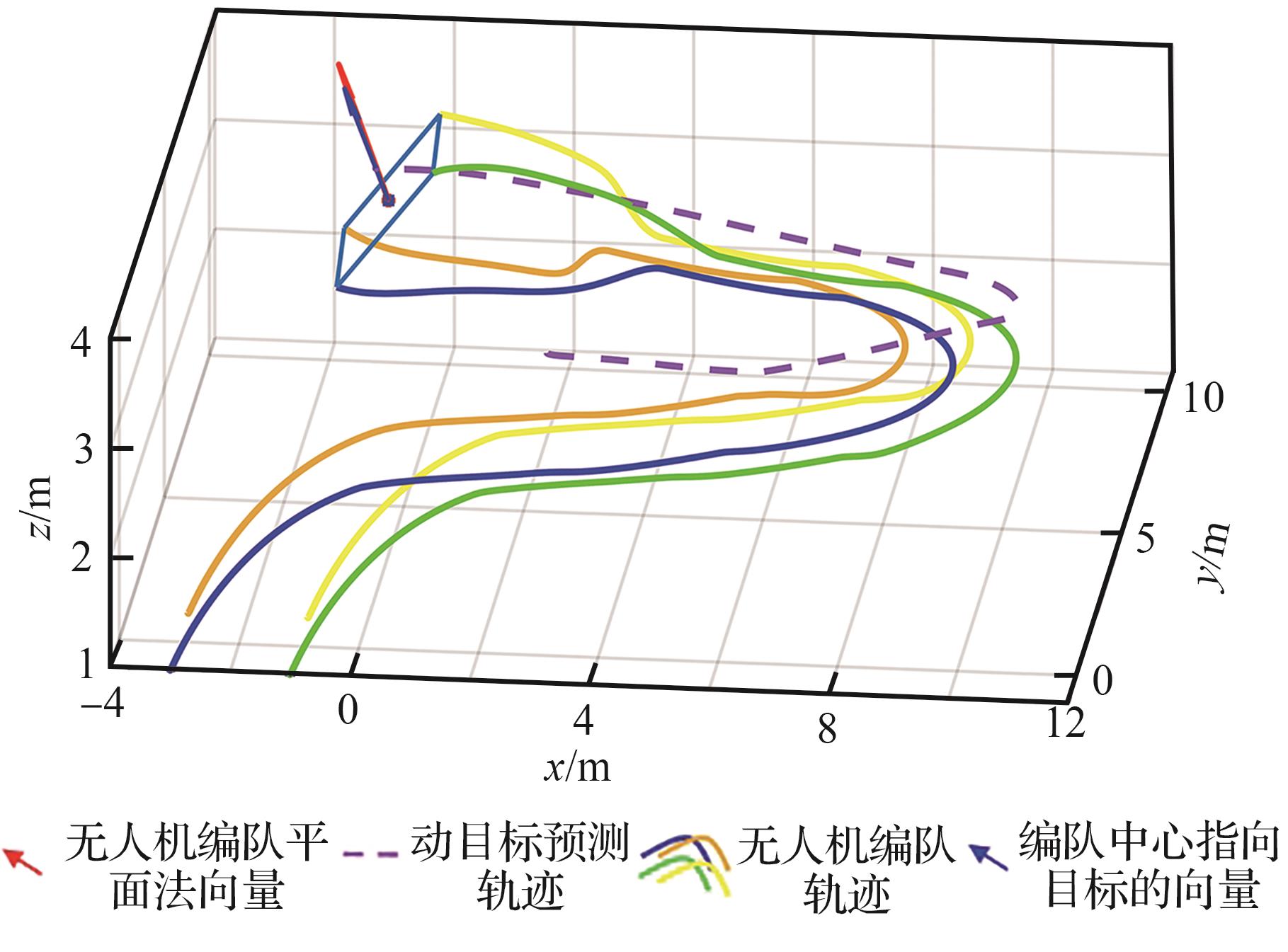
Fig.9
Drones formation plane performing rotation during tracking of the target
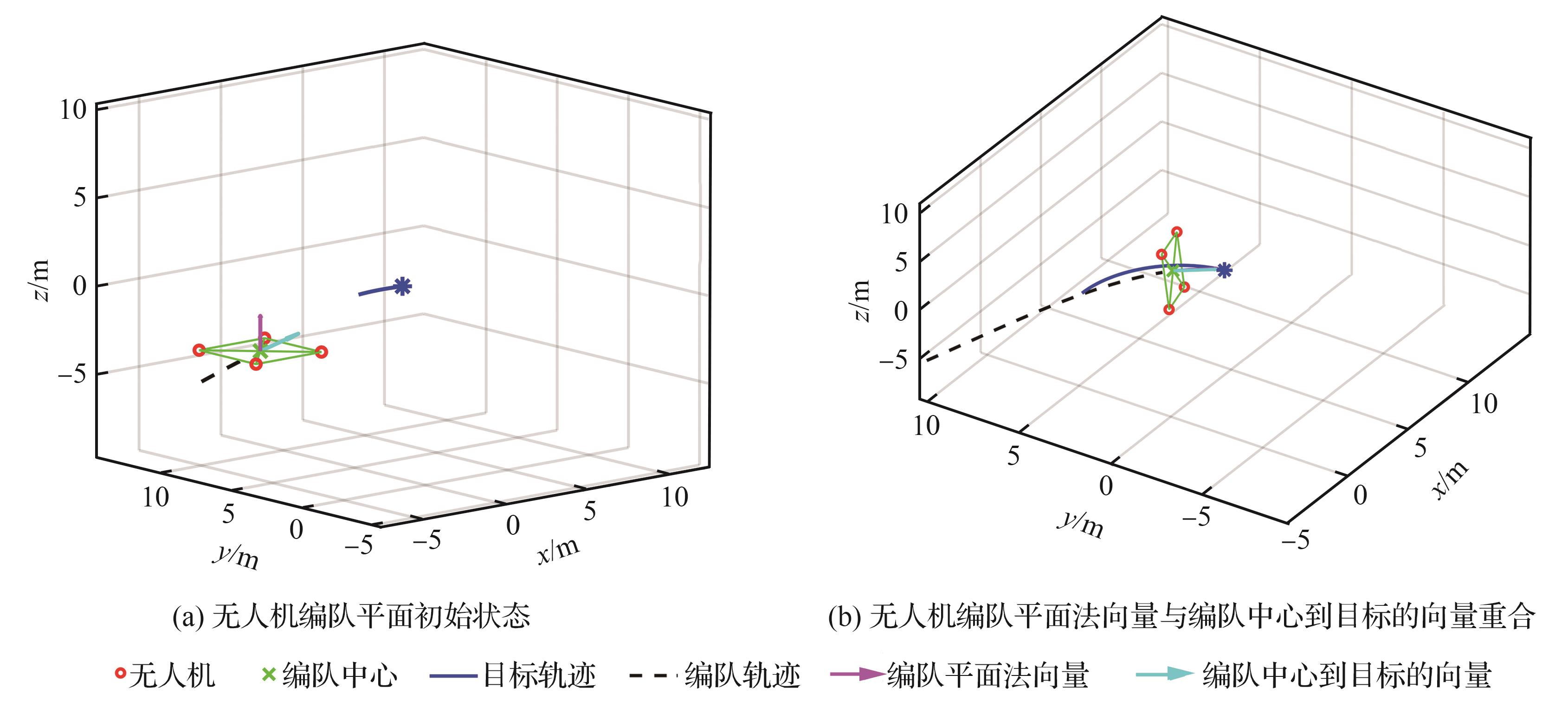
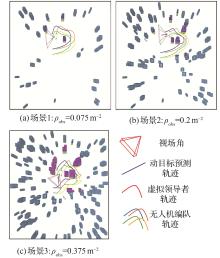
Fig.10
Drones formation tracking moving target in complex environments
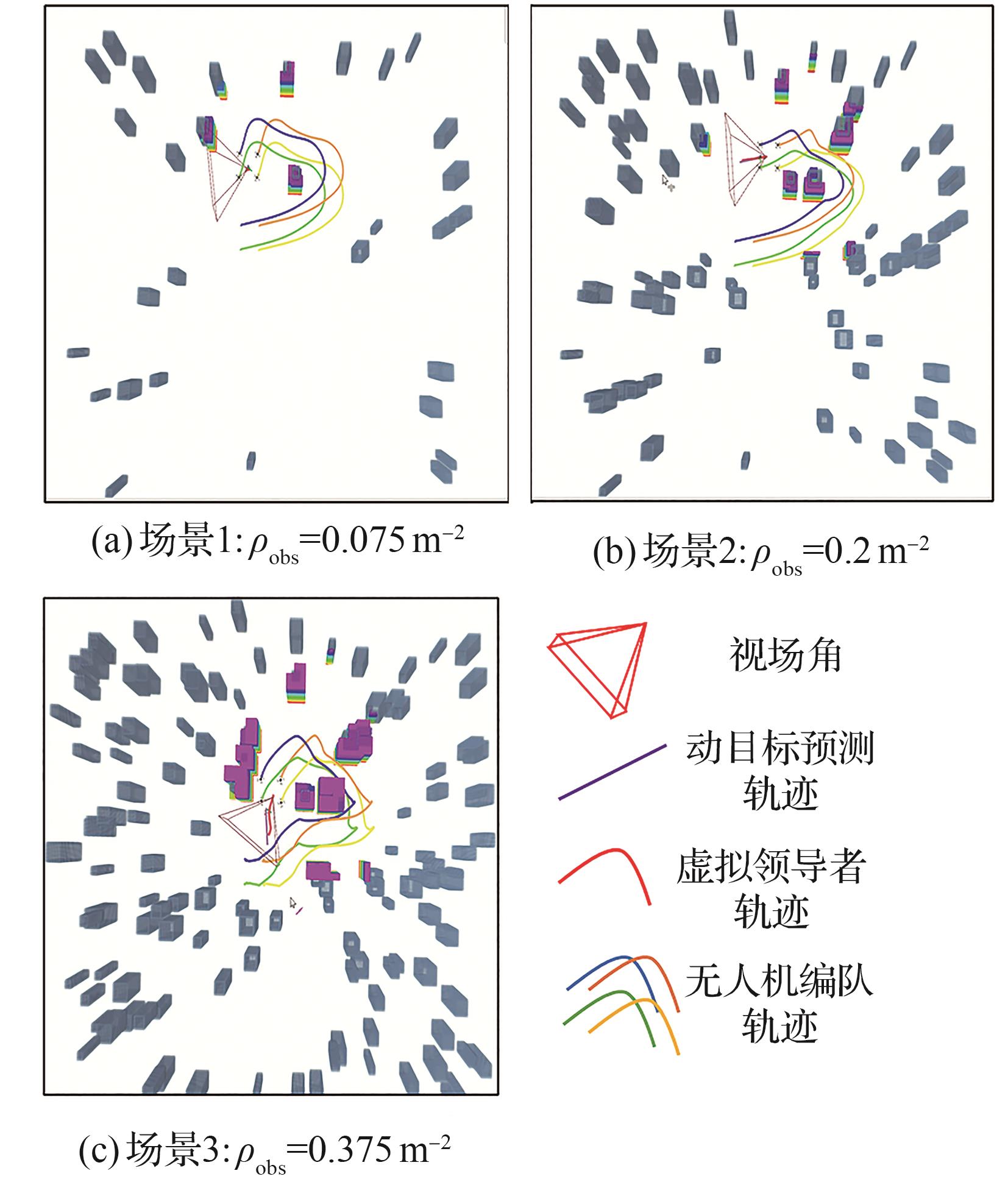
Table 1
Comparison of experiments in three scenarios
| 场景 | 障碍物密度/m-2 | 成功率/% | 编队形变量/m | |
|---|---|---|---|---|
| 1 | 0.075 | 100 | 0.06 | |
| 2 | 0.200 | 80 | 1.89 | |
| 3 | 0.325 | 60 | 2.60 | |
Fig.11
Drone formation maintains initial formation while tracking moving target (ρobs=0.075 m-2)
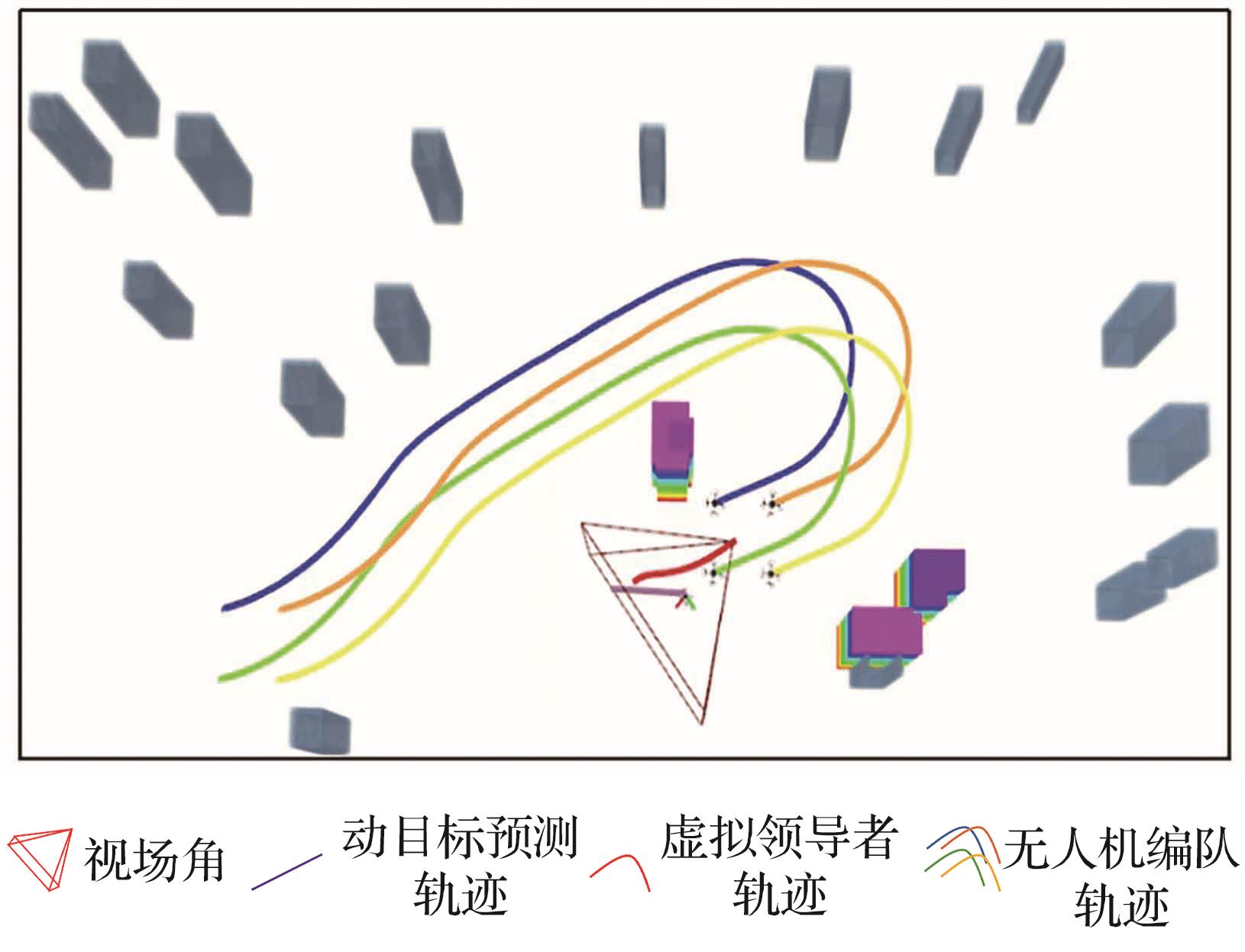
Fig.12
Drone formation affine transformation through a narrow area (ρobs=0.2 m-2)
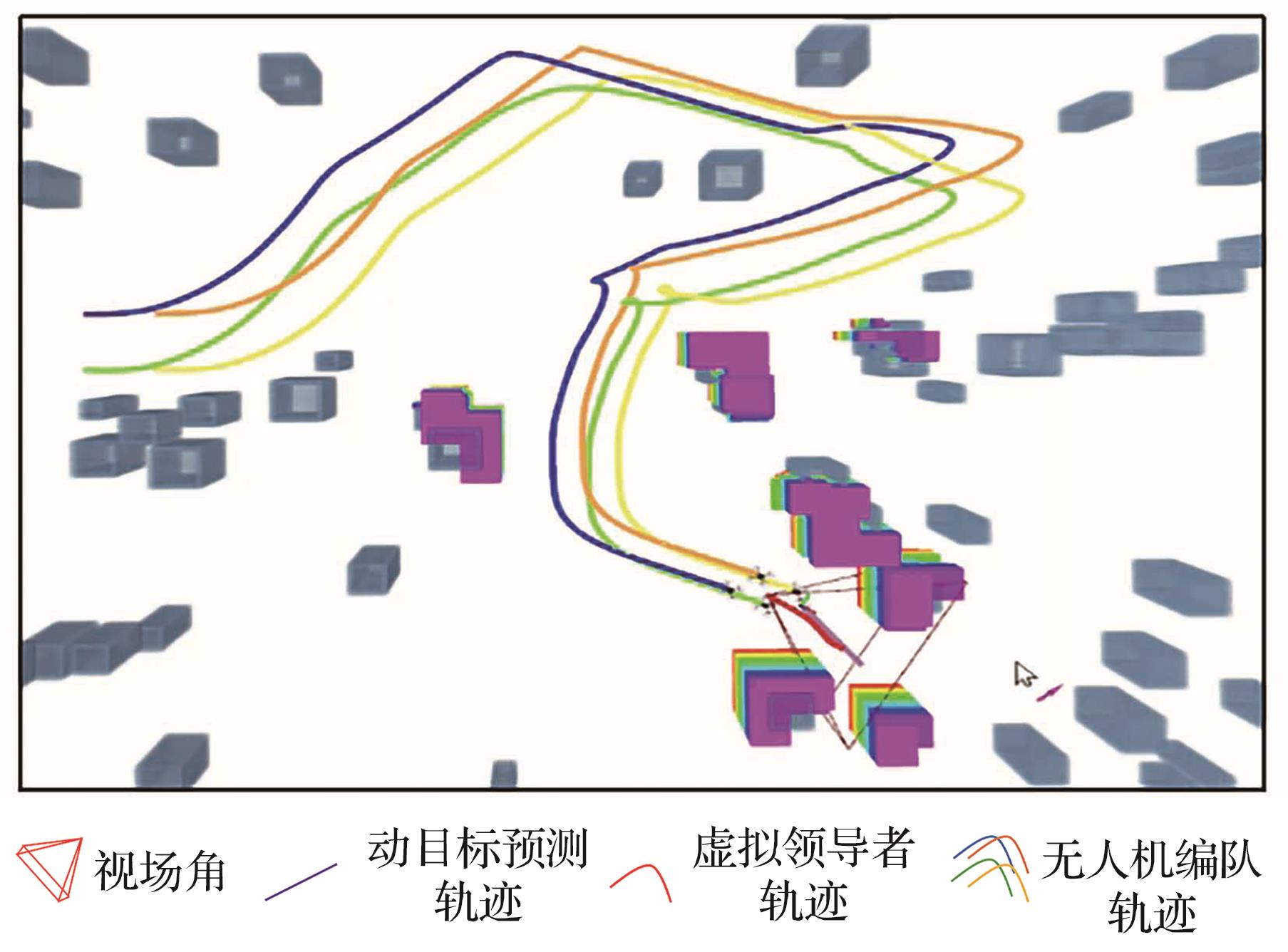
Fig.13
Drone formation affine transformation through a narrow area (ρobs=0.325 m-2)
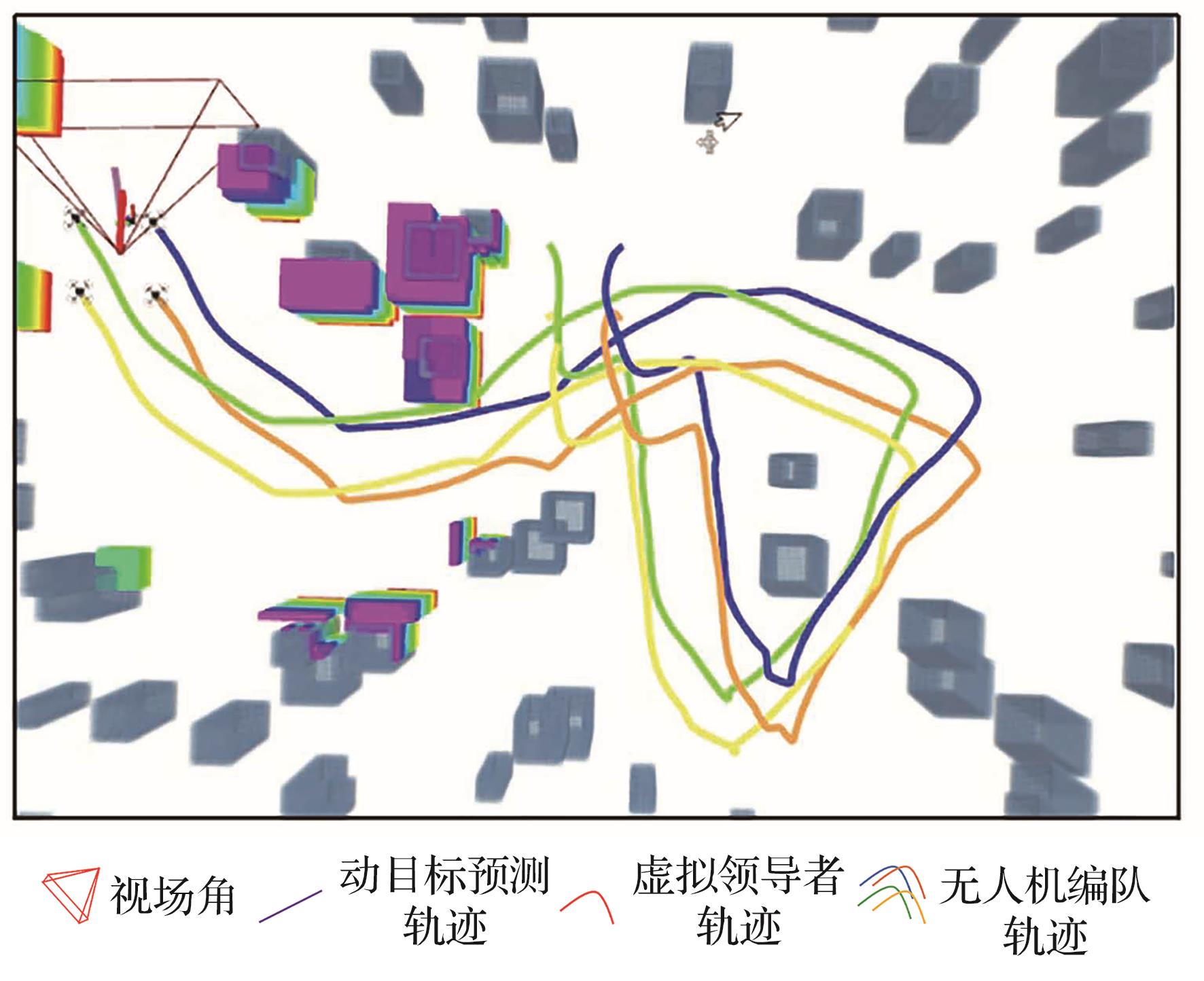
Fig.14
Drone formation capturing target in a three-dimensional complex environment
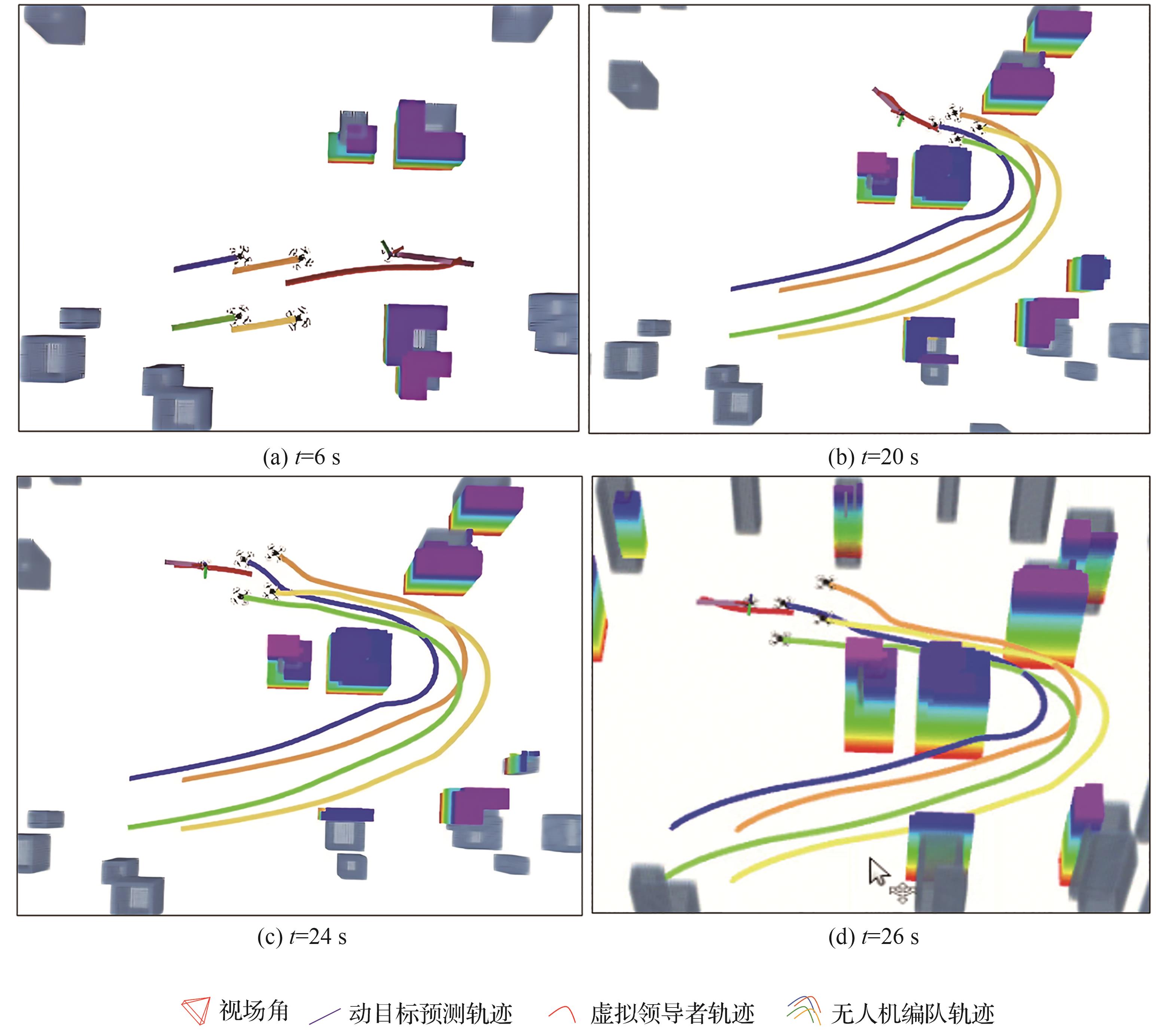
Fig.15
Historical trajectory of the process of drone formation tracking moving target
| [1] | ISHII T, MIURA J, HAYASHI K. Enhancing human-robot collaborative object search through human behavior observation and dialog[C]∥2023 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). Piscataway: IEEE Press, 2023. |
| [2] | MAHDOUI N, FRÉMONT V, NATALIZIO E. Communicating multi-UAV system for cooperative SLAM-based exploration[J]. Journal of Intelligent & Robotic Systems, 2020, 98(2): 325-343. |
| [3] | KLEMAS V V. Coastal and environmental remote sensing from unmanned aerial vehicles: An overview[J]. Journal of Coastal Research, 2015, 315: 1260-1267. |
| [4] | YAACOUB J P, NOURA H, SALMAN O, et al. Security analysis of drones systems: Attacks, limitations, and recommendations[J]. Internet of Things, 2020, 11: 100218. |
| [5] | WATANABE K, SAKAI R, TANAKA S, et al. Electromagnetic interference with the mobile communication devices in unmanned aerial vehicles and its countermeasures[J]. IEEE Access, 2024, 12: 11642-11652. |
| [6] | JEON G H, LEE J H, SUNG Y S, et al. Cooperative friendly jamming techniques for drone-based mobile secure zone[J]. Sensors, 2022, 22(3): 865. |
| [7] | GAO M, ZHANG L F, SHEN L M, et al. Exploring practical acoustic transduction attacks on inertial sensors in MDOF systems[J]. IEEE Transactions on Mobile Computing, 2024, 23(5): 3539-3557. |
| [8] | MUHAIDHEEN M, MURALIDHARAN S, ALAGAMMAL S, et al. Design and development of unmanned aerial vehicle (UAV) directed artillery prototype for defense application[J]. International Journal of Electrical and Electronics Research, 2022, 10(4): 1086-1091. |
| [9] | TAILLANDIER M, PEIFFER R, DARUT G, et al. Duality safety/efficiency for laser directed energy weapon applications[C]∥High Power Lasers: Technology and Systems, Platforms, Effects VI. SPIE, 2023. |
| [10] | RUAN W Y, SUN Y B, DENG Y M, et al. Hawk-pigeon game tactics for unmanned aerial vehicle swarm target defense[J]. IEEE Transactions on Industrial Informatics, 2023, 19(12): 11619-11629. |
| [11] | 刘峰, 魏瑞轩, 周凯, 等. 基于群体意志统一的无人机协同围捕策略[J]. 北京航空航天大学学报, 2022, 48(11): 2241-2249. |
| LIU F, WEI R X, ZHOU K, et al. Multi-UAV round up strategy based on unity of group will[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2241-2249 (in Chinese). | |
| [12] | CHANG K, XIA Y Q, HUANG K L, et al. Moving target tracking of a UAV formation[C]∥2016 Chinese Control and Decision Conference (CCDC). Piscataway: IEEE Press, 2016. |
| [13] | VAROL G, LAPTEV I, SCHMID C. Long-term temporal convolutions for action recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(6): 1510-1517. |
| [14] | BATZ T, WATSON K, BEYERER J. Recognition of dangerous situations within a cooperative group of vehicles[C]∥2009 IEEE Intelligent Vehicles Symposium. Piscataway: IEEE Press, 2009. |
| [15] | LEFKOPOULOS V, MENNER M, DOMAHIDI A, et al. Interaction-aware motion prediction for autonomous driving: A multiple model Kalman filtering scheme[J]. IEEE Robotics and Automation Letters, 2021, 6(1): 80-87. |
| [16] | HAN G X, MA J W, HUANG S Y, et al. Few-shot object detection with fully cross-transformer[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022. |
| [17] | CHENG B W, MISRA I, SCHWING A G, et al. Masked-attention mask transformer for universal image segmentation[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022. |
| [18] | HAN Z C, ZHANG R B, PAN N, et al. Fast-tracker: A robust aerial system for tracking agile target in cluttered environments[C]∥2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2021. |
| [19] | HUANG J H, ZENG J, CHI X M, et al. Velocity obstacle for polytopic collision avoidance for distributed multi-robot systems[J]. IEEE Robotics and Automation Letters, 2023, 8(6): 3502-3509. |
| [20] | VAN DEN BERG J, SNAPE J, GUY S J, et al. Reciprocal collision avoidance with acceleration-velocity obstacles[C]∥2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2011. |
| [21] | ARUL S H, MANOCHA D. DCAD: Decentralized collision avoidance with dynamics constraints for agile quadrotor swarms[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1191-1198. |
| [22] | PARK J, KIM J, JANG I, et al. Efficient multi-agent trajectory planning with feasibility guarantee using relative Bernstein polynomial[C]∥2020 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2020. |
| [23] | ZHOU X, WANG Z P, WEN X Y, et al. Decentralized spatial-temporal trajectory planning for multicopter swarms[DB/OL]. arXiv preprint: 2106.12481, 2021. |
| [24] | GAO Y M, JI J L, WANG Q H, et al. Adaptive tracking and perching for quadrotor in dynamic scenarios[J]. IEEE Transactions on Robotics, 2023, 40: 499-519. |
| [25] | DONG X W, HU G Q. Time-varying formation tracking for linear multiagent systems with multiple leaders[J]. IEEE Transactions on Automatic Control, 2017, 62(7): 3658-3664. |
| [26] | REZAEE H, ABDOLLAHI F. A decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots[J]. IEEE Transactions on Industrial Electronics, 2014, 61(1): 347-354. |
| [27] | BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE Transactions on Robotics and Automation, 1998, 14(6): 926-939. |
| [28] | LI S L, CHEN Y Z, ZHAN J Y. Event-triggered consensus control for multi-agent systems with Markov switching topologies[C]∥2021 40th Chinese Control Conference (CCC). Piscataway: IEEE Press, 2021. |
| [29] | ALONSO-MORA J, MONTIJANO E, SCHWAGER M, et al. Distributed multi-robot formation control among obstacles: A geometric and optimization approach with consensus[C]∥2016 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2016. |
| [30] | REZAEE H and ABDOLLAHI F. Mobile robots cooperative control and obstacle avoidance using potential field[C]∥2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Piscataway: IEEE Press, 2011. |
| [31] | ZHOU D J, WANG Z J, SCHWAGER M. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures[J]. IEEE Transactions on Robotics, 2018, 34(4): 916-923. |
| [32] | CHEN W C, KAWANISHI M, LU C Y, et al. Cooperative load transportation of multi-drones based on disturbance observer and formation control[J]. IEEE Access, 2024, 12: 77393-77405. |
| [33] | KLAUSEN K, MEISSEN C, FOSSEN T I, et al. Cooperative control for multirotors transporting an unknown suspended load under environmental disturbances[J]. IEEE Transactions on Control Systems Technology, 2020, 28(2): 653-660. |
| [34] | GERTZ E M, WRIGHT S J. Object-oriented software for quadratic programming[J]. ACM Transactions on Mathematical Software, 2003, 29(1): 58-81. |
| [35] | ZHOU X, WANG Z P, YE H K, et al. EGO-planner: An ESDF-free gradient-based local planner for quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 478-485. |
| [36] | MUELLER M W, HEHN M, D’ANDREA R. A computationally efficient motion primitive for quadrocopter trajectory generation[J]. IEEE Transactions on Robotics, 2015, 31(6): 1294-1310. |
| [37] | PRESS W H, TEUKOLSKY S A, VETTERLING W T, et al. Numerical Recipes 3rd Edition: The Art of Scientific Computing[M]. New York: Cambridge University Press, 2009:481-482. |
| [38] | JI J L, PAN N, XU C, et al. Elastic tracker: A spatio-temporal trajectory planner for flexible aerial tracking[C]∥2022 International Conference on Robotics and Automation (ICRA). New York: ACM, 2022. |
| [1] | Zhicheng ZHANG, Yuan ZHOU, Yu ZHAO, Weimin BAO. Cooperative formation control for multi-satellite system applied to distributed prescribed-time networking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330932-330932. |
| [2] | Chuangxin ZHAO, Haojian TI, Zhaohong LI, Shan FENG, Shuxing YANG, Peng TANG. Multi⁃UAV cooperative formation control and flight test verification [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530249-530249. |
| [3] | Jiang ZHAO, Xuan ZHANG, Pei CHI, Yingxun WANG. Self⁃adaptive formation control and dynamic path planning for air⁃ground heterogeneous swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809-329809. |
| [4] | Honghong ZHANG, Wenhua LI, Jiayi ZHENG, Hongbin LIU, Peng ZHANG, Peng GAO, Xusheng GAN. Manned/unmanned aerial vehicle cooperative combat system: Concepts, technologies, and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 29653-029653. |
| [5] | Zhongxi ZHANG, Shuaiqin WANG, Huijuan ZHAO, Dinghua ZHANG, Longhao WANG. Residual stresses evolution mechanism of thin⁃walled component and deformation control method [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 629365-629365. |
| [6] | Bochen LI, Shuangcheng NIU, Lu DING, Chenggang WANG, Lei SONG, Yuqiang JIN. Unmanned group resilient motion planning for attacking sea surface targets [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 329455-329455. |
| [7] | Jiaxiu YANG, Xinkai LI, Hongli ZHANG, Hao WANG. Time-varying formation control for heterogeneous clusters with switching topologies via reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 329166-329166. |
| [8] | Qingrui ZHANG, Yunyun LIU, Huijie SUN, Bo ZHU. Robust cooperative tracking control for close formation of fixed⁃wing unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629233-629233. |
| [9] | Hongzhen GUO, Mou CHEN, Yongdong DAI, Maofei WANG. Distributed adaptive event⁃triggered formation control for QUAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729917-729917. |
| [10] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [11] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [12] | Bojian LIU, Aijun LI, Yong GUO, Changqing WANG. Fault-tolerant containment control for precise formation of UAVs with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327414-327414. |
| [13] | Yongxing TANG, Zhanxia ZHU, Hongwen ZHANG, Jianjun LUO, Jianping YUAN. A tutorial and review on robot motion planning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 26495-026495. |
| [14] | Zhiqiang WEI, Zheming WENG, Yongzhao HUA, Xiwang DONG, Zhang REN. Formation-containment tracking control for heterogeneous unmanned swarm systems with switching topologies [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 326504-326504. |
| [15] | Zikang SU, Haitong CHEN, Chuntao LI, Zhuolin XING, Honglun WANG. Coordinating motion planning for towed cable system in UAV aerial recovery with unmatched envelope [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327377-327377. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341