ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (9): 327414-327414.doi: 10.7527/S1000-6893.2022.27414
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Bojian LIU, Aijun LI, Yong GUO( ), Changqing WANG
), Changqing WANG
Received:2022-05-11
Revised:2022-05-29
Accepted:2022-06-29
Online:2022-07-15
Published:2022-07-08
Contact:
Yong GUO
E-mail:guoyong@nwpu.edu.cn
Supported by:CLC Number:
Bojian LIU, Aijun LI, Yong GUO, Changqing WANG. Fault-tolerant containment control for precise formation of UAVs with input saturation[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327414-327414.

Fig. 1
Curves of smooth functions
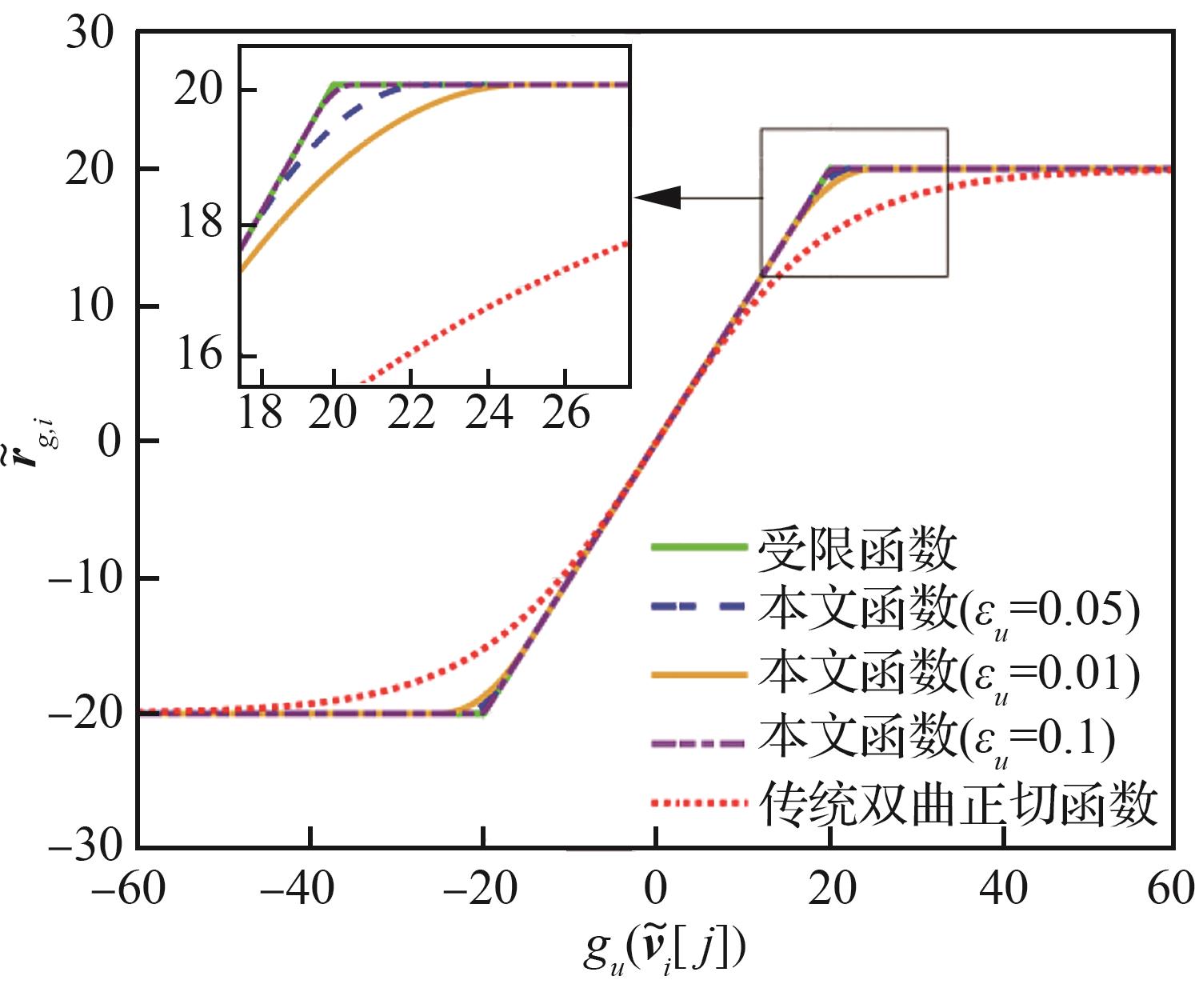
Table 1
Initial states of UAV team
| 无人机 | ||
|---|---|---|
| 跟随者 1 | [5,-1,-1] | [30,0,0] |
| 跟随者 2 | [3,1,-3] | [30,0,0] |
| 跟随者 3 | [5,-1,-3] | [30,0,0] |
| 领航者 1 | [20,-5,-10] | [30,0,0] |
| 领航者 2 | [20,-5,10] | [30,0,0] |
| 领航者 3 | [20,10,10] | [30,0,0] |
| 领航者 4 | [20,10,-10] | [30,0,0] |
Table 2
Parameters of controller
| 控制参数 | 取值 |
|---|---|
| {0.01, 0.01} | |
| {1.1, 0.01, 1.3, 0.01} | |
| {3.5, 3, 0.05} | |
| {1.2, 0.5} | |
| 0.92 |
Table 3
Information of faults for followers
| 无人机 | 故障时间 | ||
|---|---|---|---|
| 跟随者 1 | 20 | ||
| 跟随者 2 | 30 | ||
| 跟随者 3 | 10 |

Fig. 2
Communication topology graph based on D¯g1
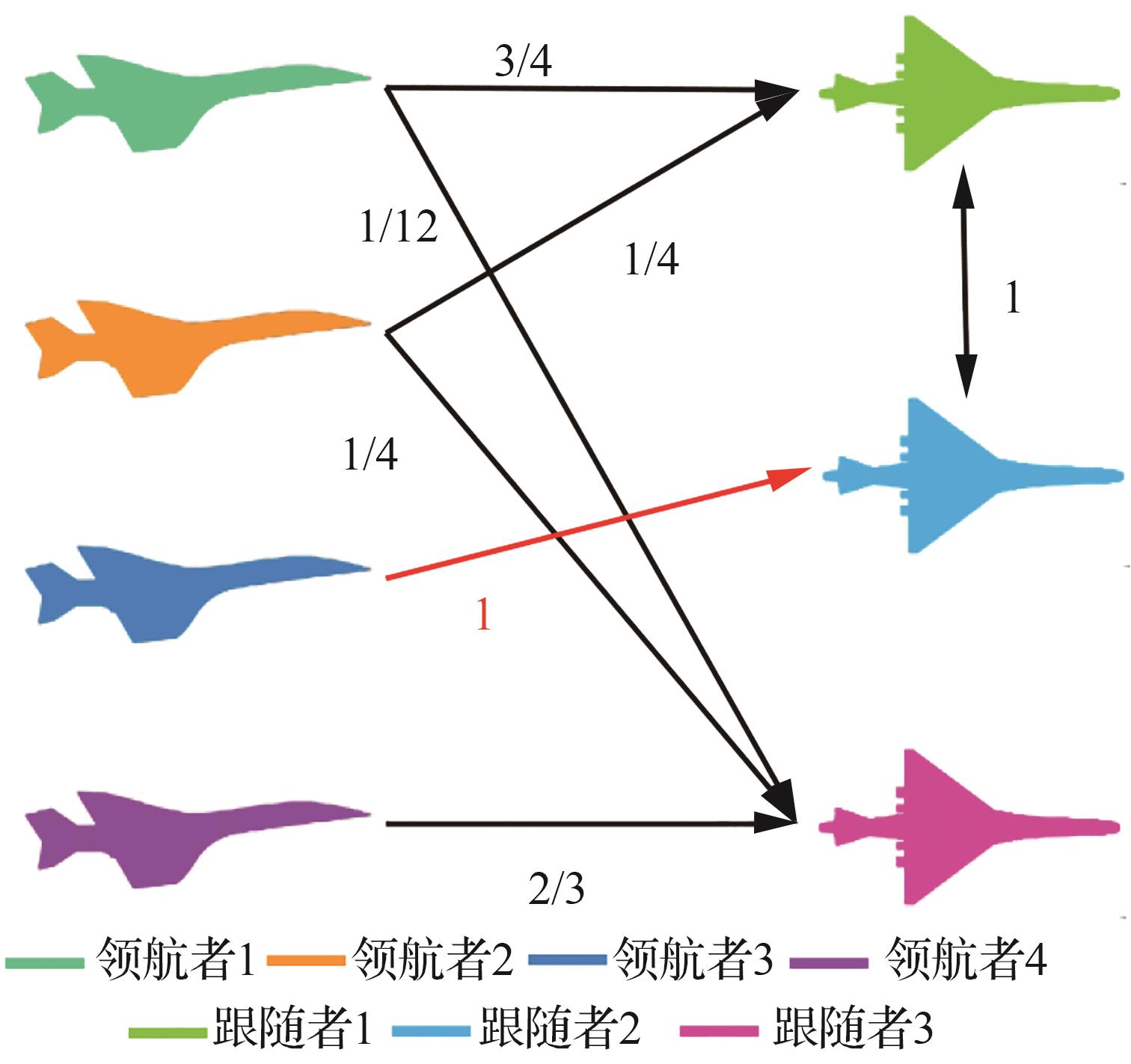
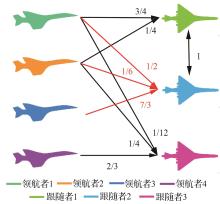
Fig. 3
Communication topology graph based on D⌢g1
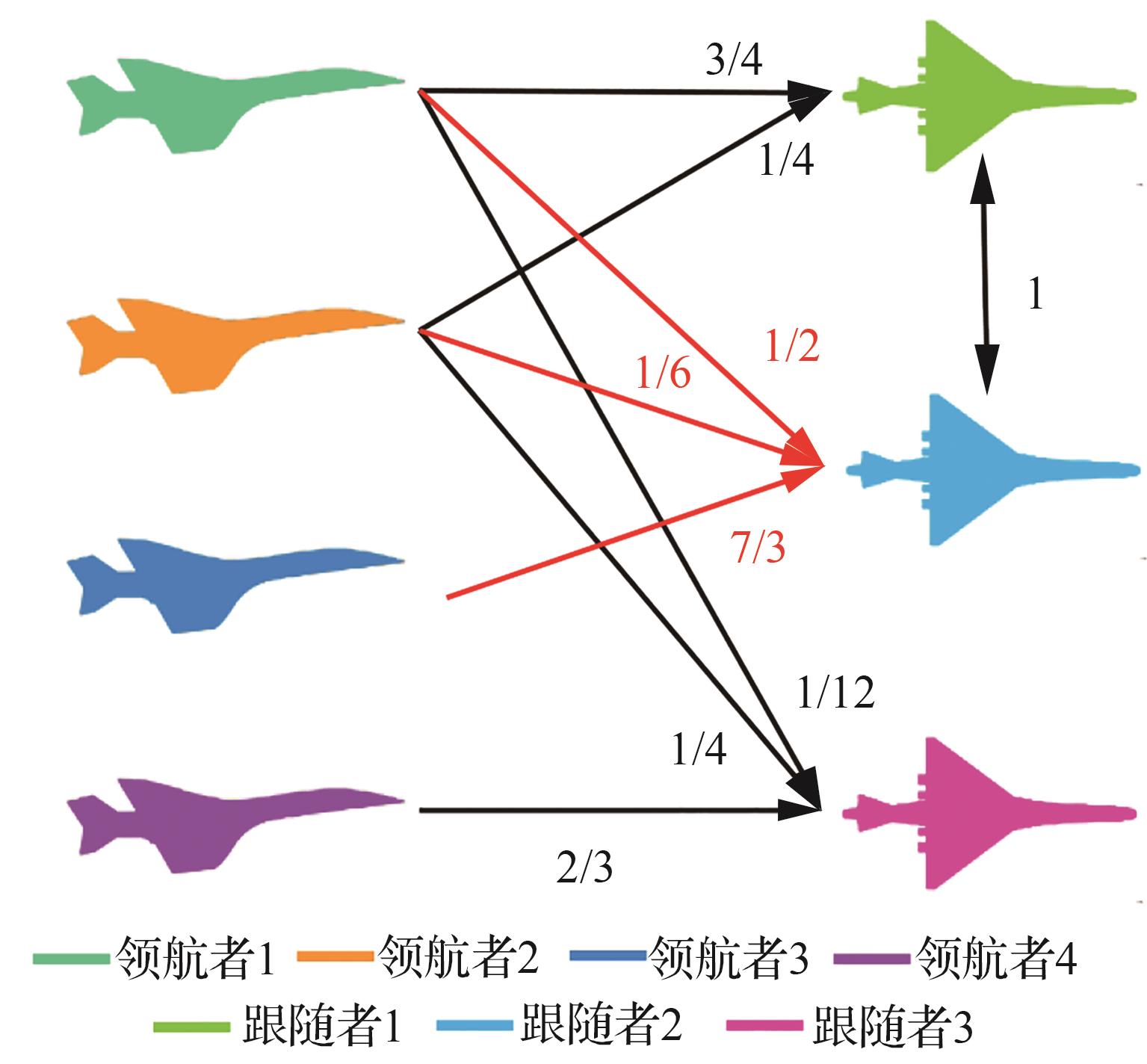
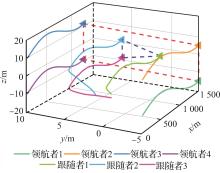
Fig. 4
Trajectories of UAV team
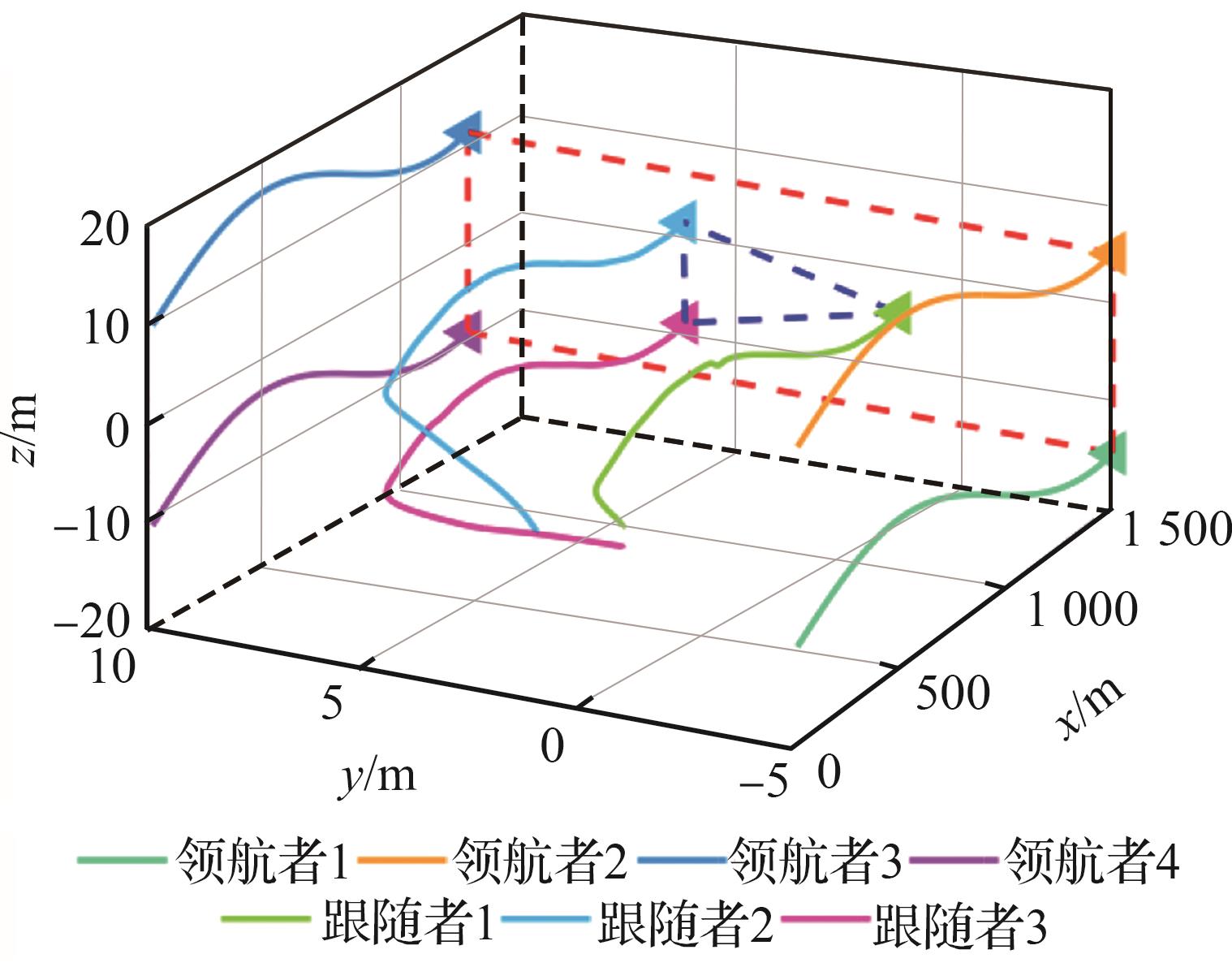
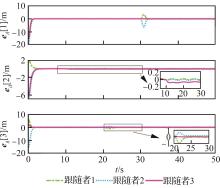
Fig. 5
Position errors of UAV team

Fig. 6
Velocity errors of UAV team
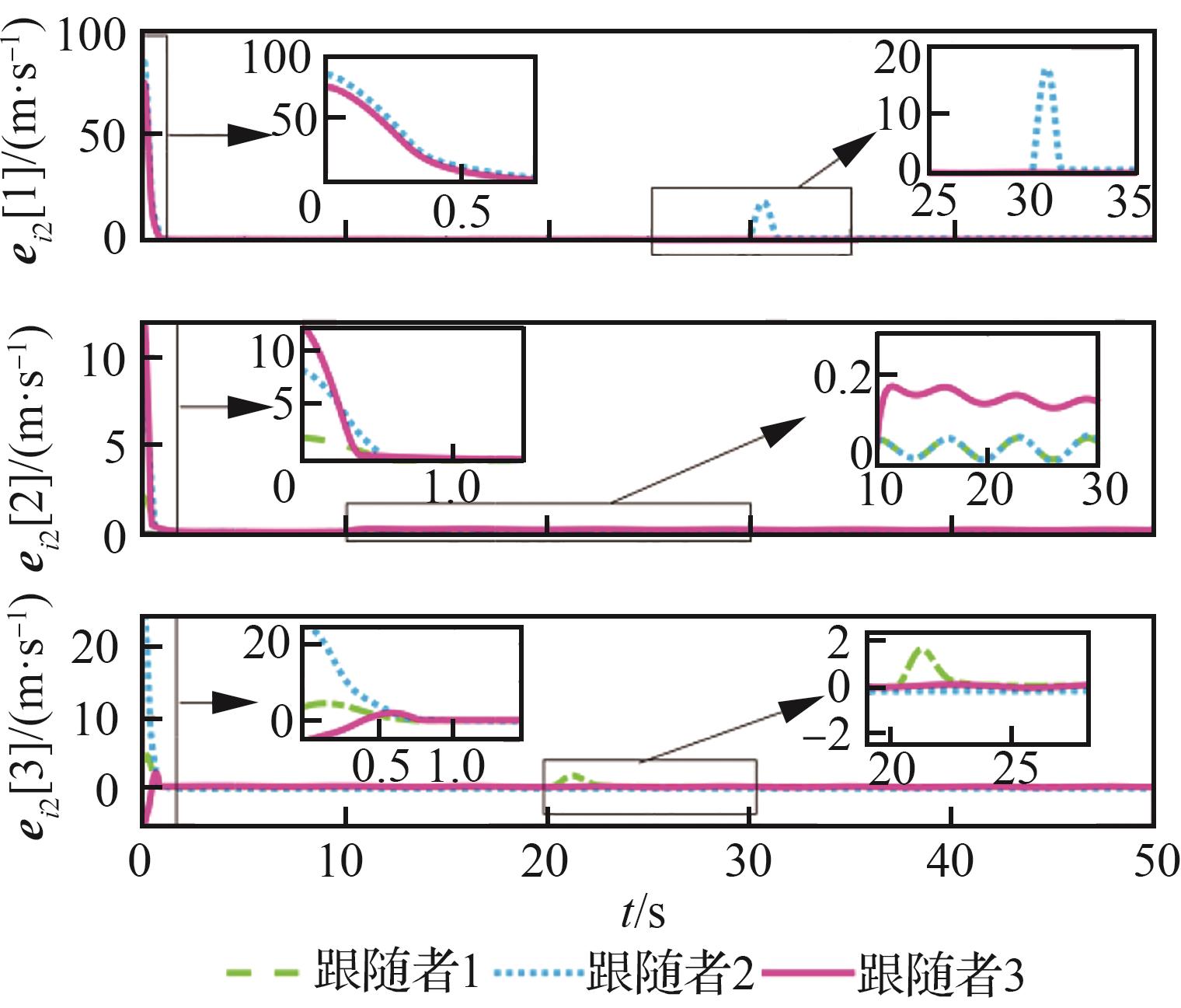
Fig. 7
Adaptive signal D^i
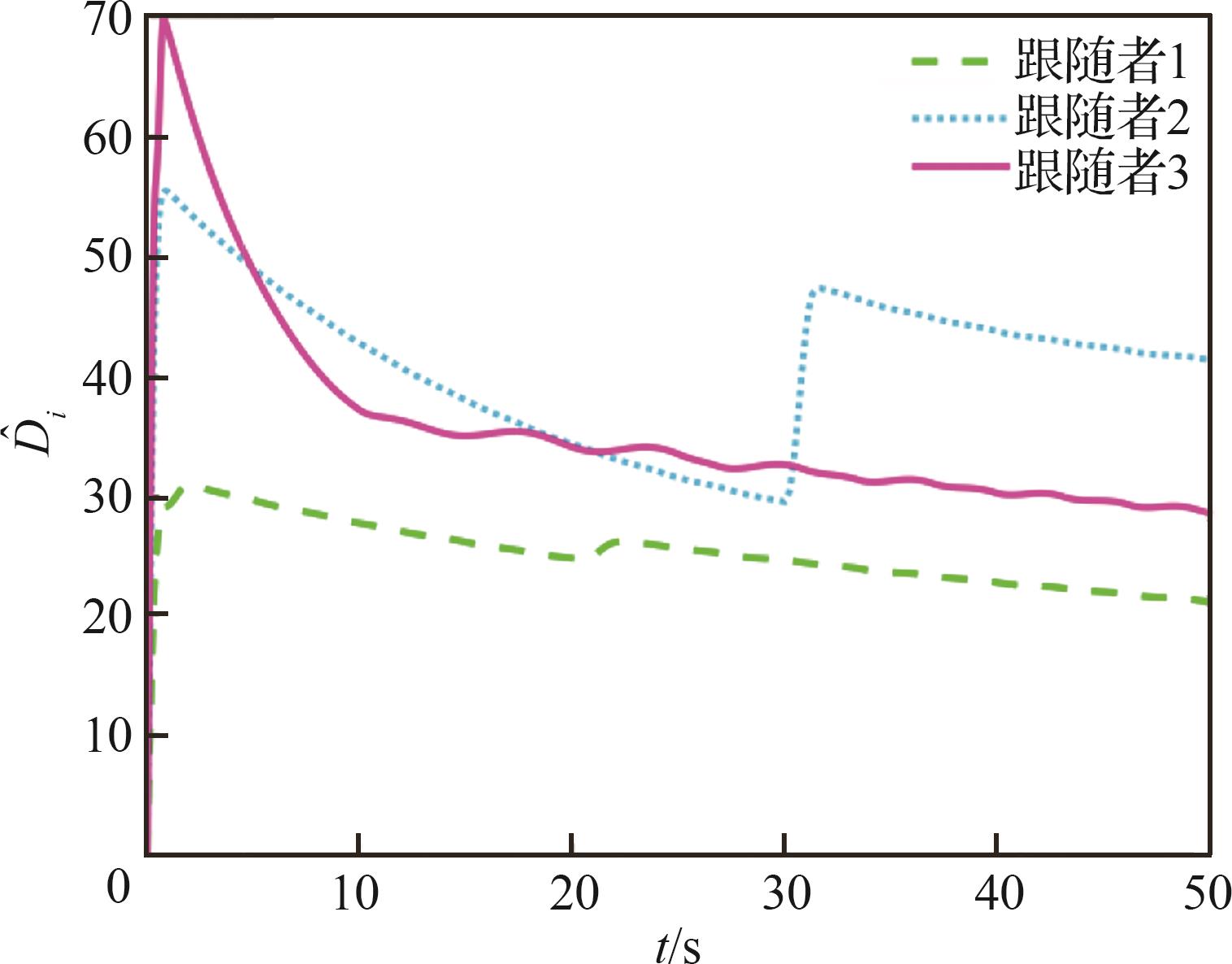

Fig. 8
Adaptive signal P^i
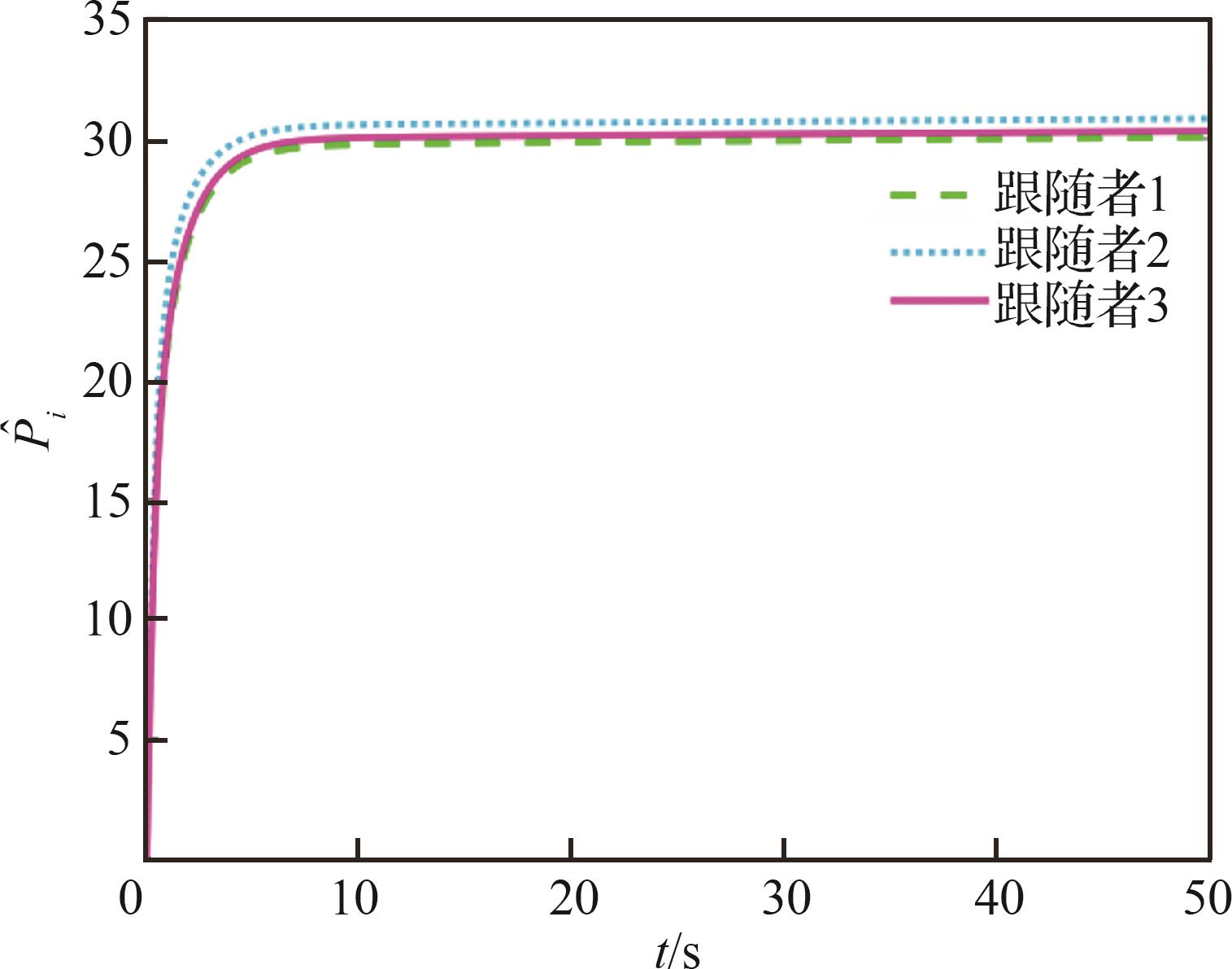
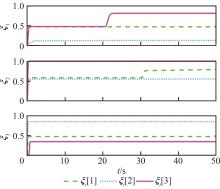
Fig. 9
Nussbaum signal ξi
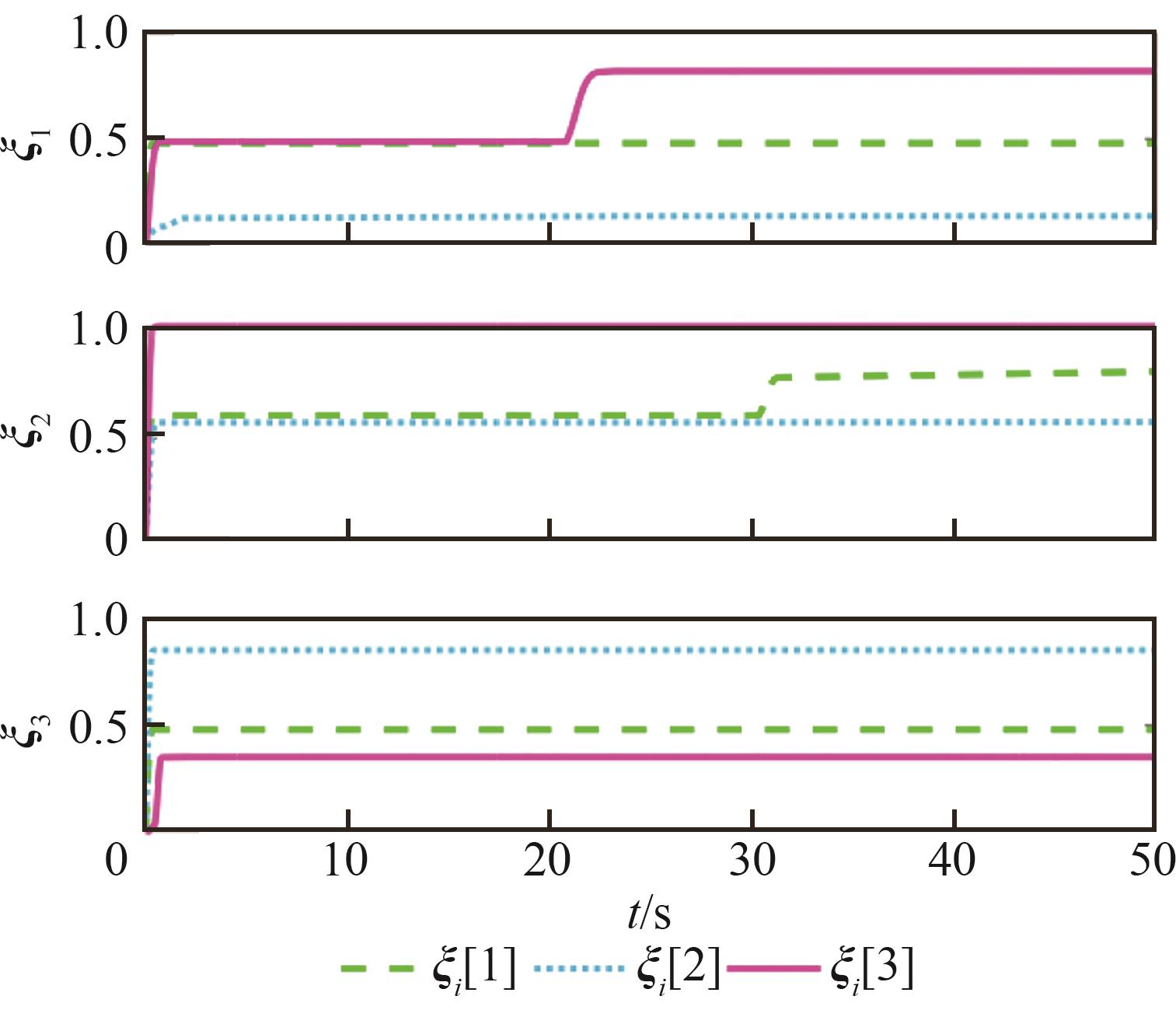

Fig. 10
Control input signals of UAV team

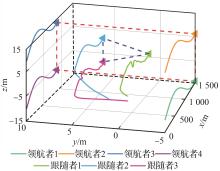
Fig. 11
Trajectories of UAV team with AFTC

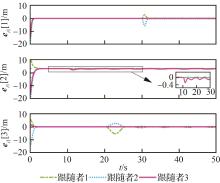
Fig. 12
Position errors of UAV team with AFTC


Fig. 13
Velocity errors of UAV team with AFTC
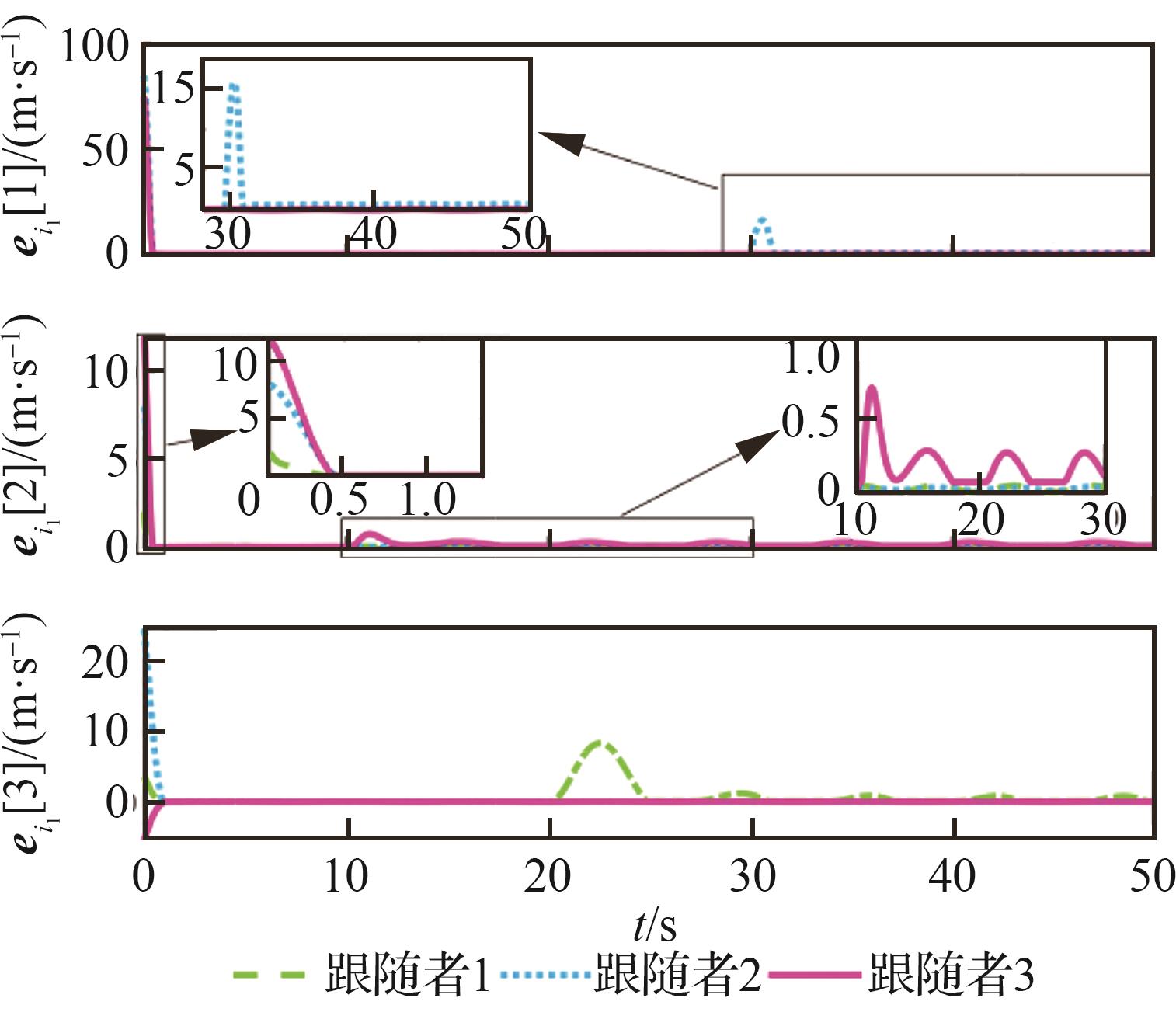
Fig. 14
Trajectories of UAV team with AROFTC
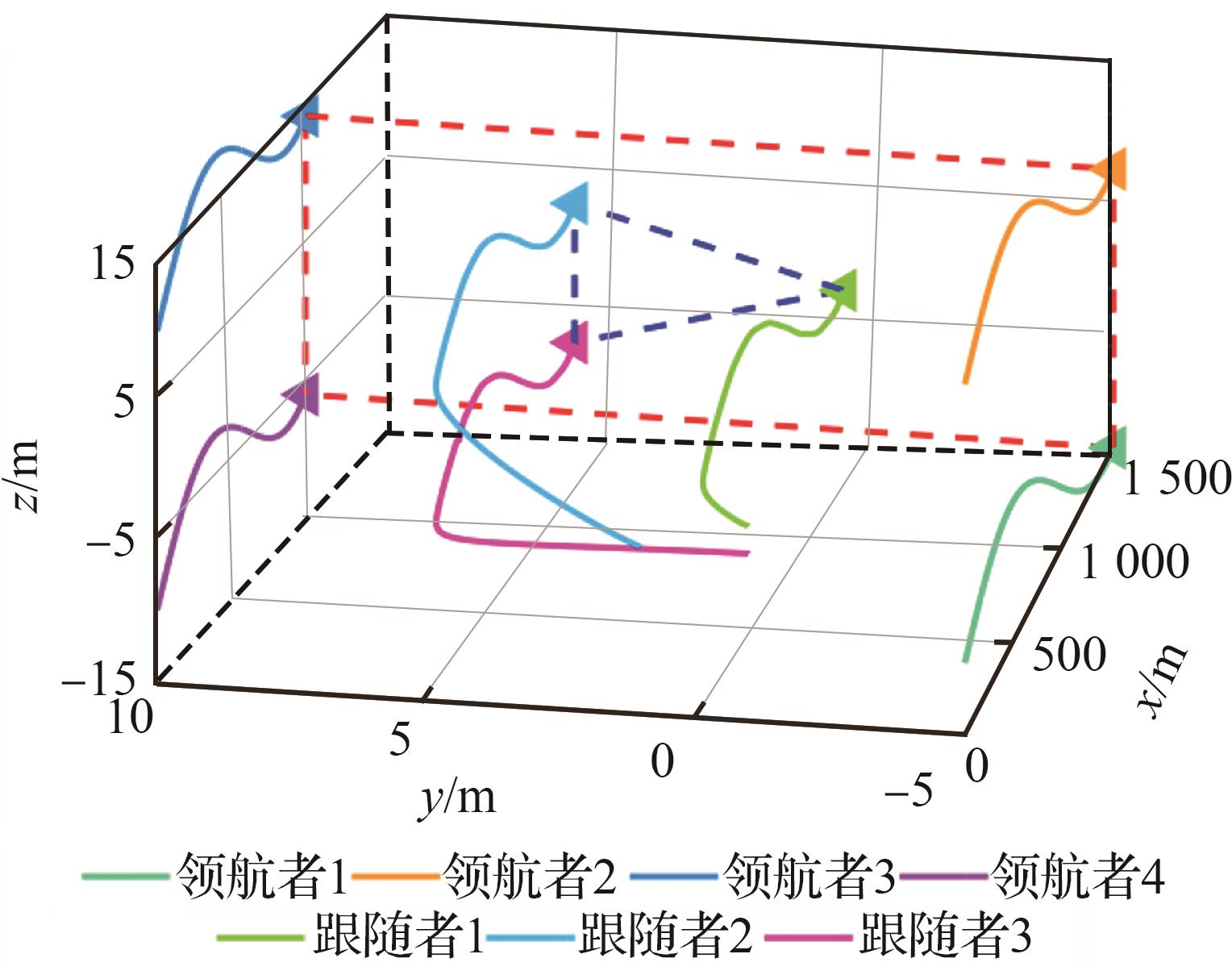
Fig. 15
Position errors of UAV team with AROFTC


Fig. 16
Velocity errors of UAV team with AROFTC

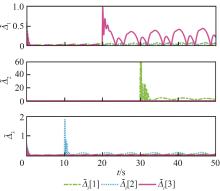
Fig. 17
Fitting errors of RBFNN
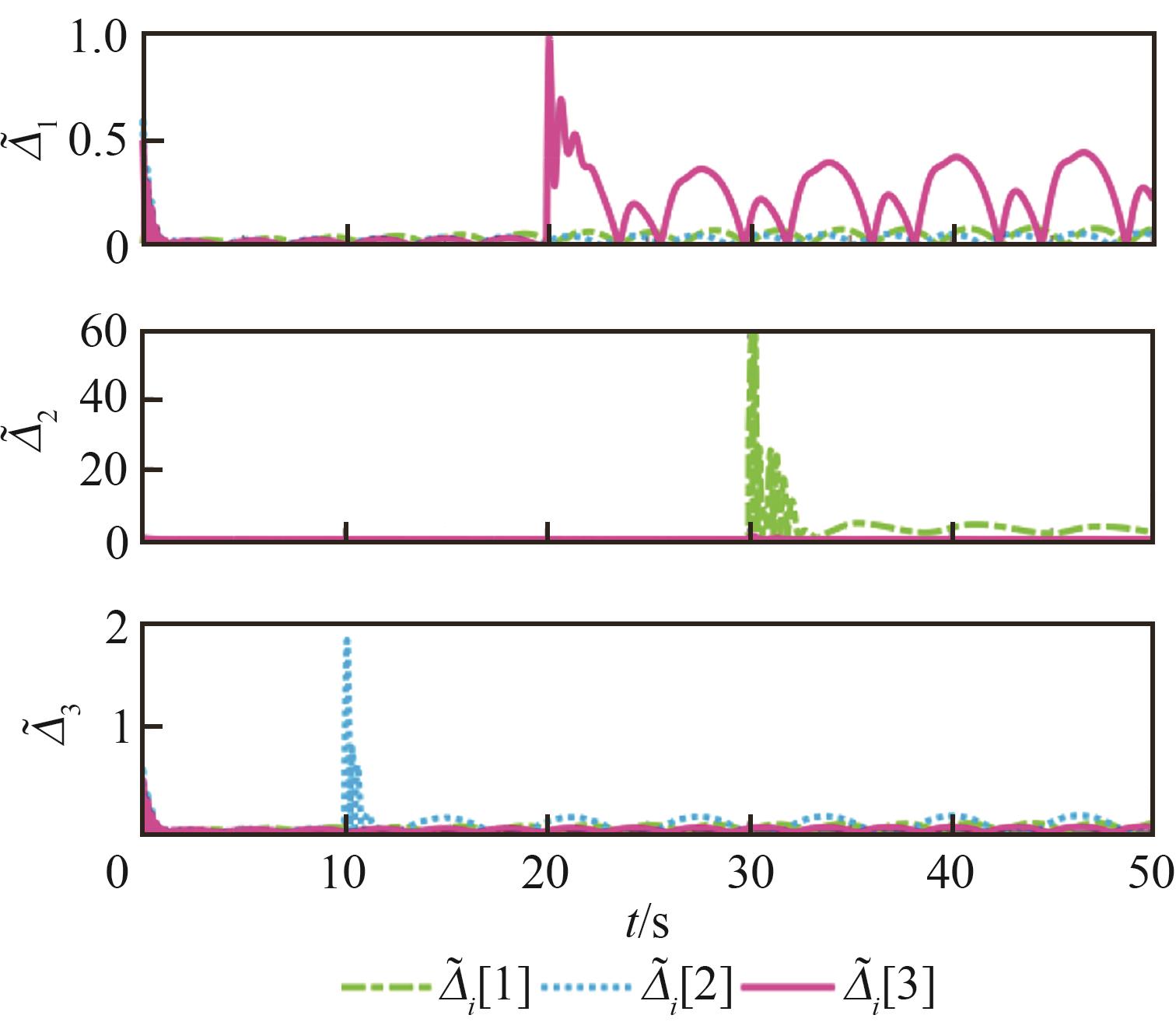
Fig. 18
Control input signals of Follower 1 with different methods
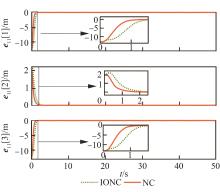
Fig. 19
Position errors of Follower 1 with different methods
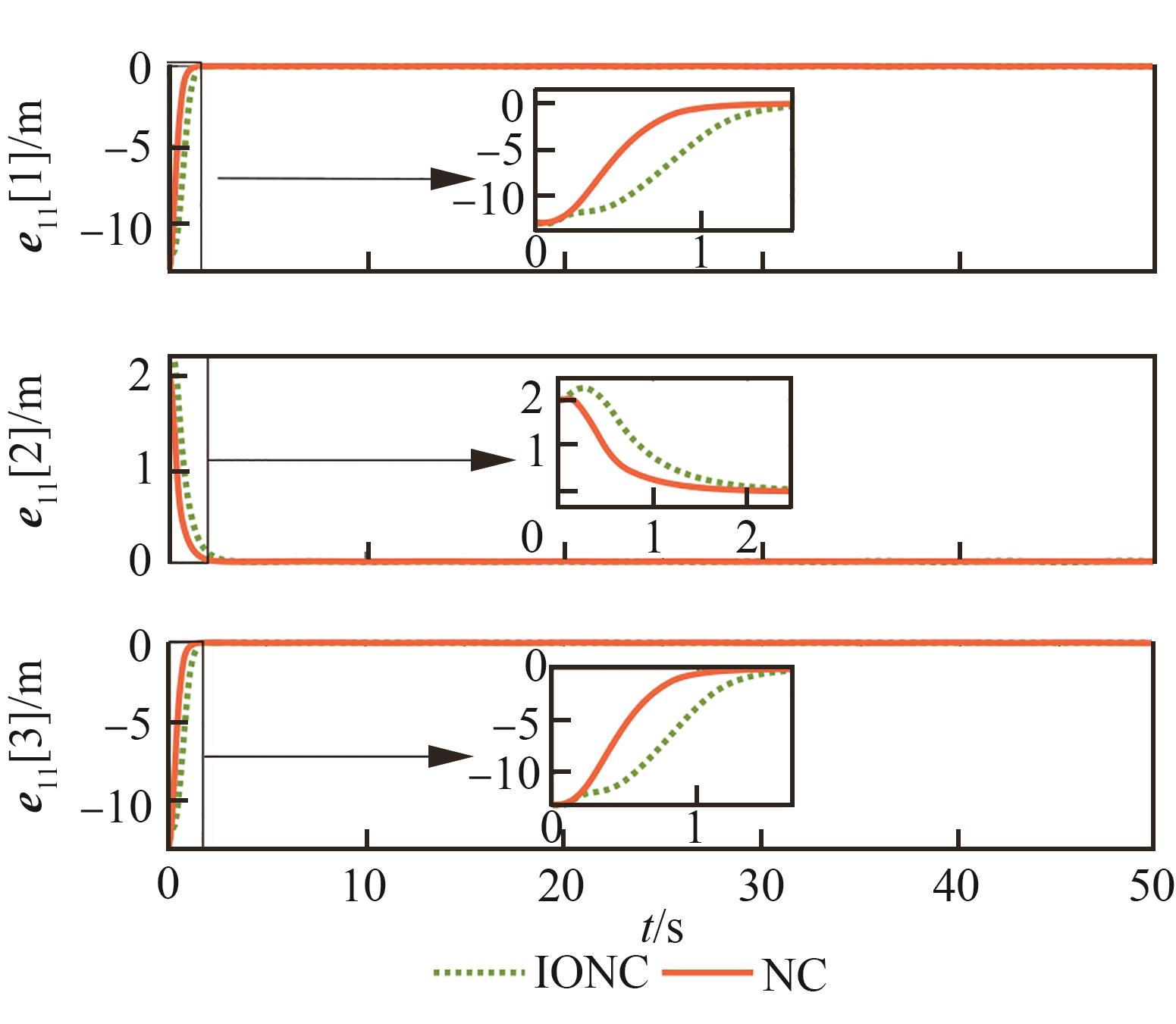

Fig. 20
Velocity errors of Follower 1 with different methods
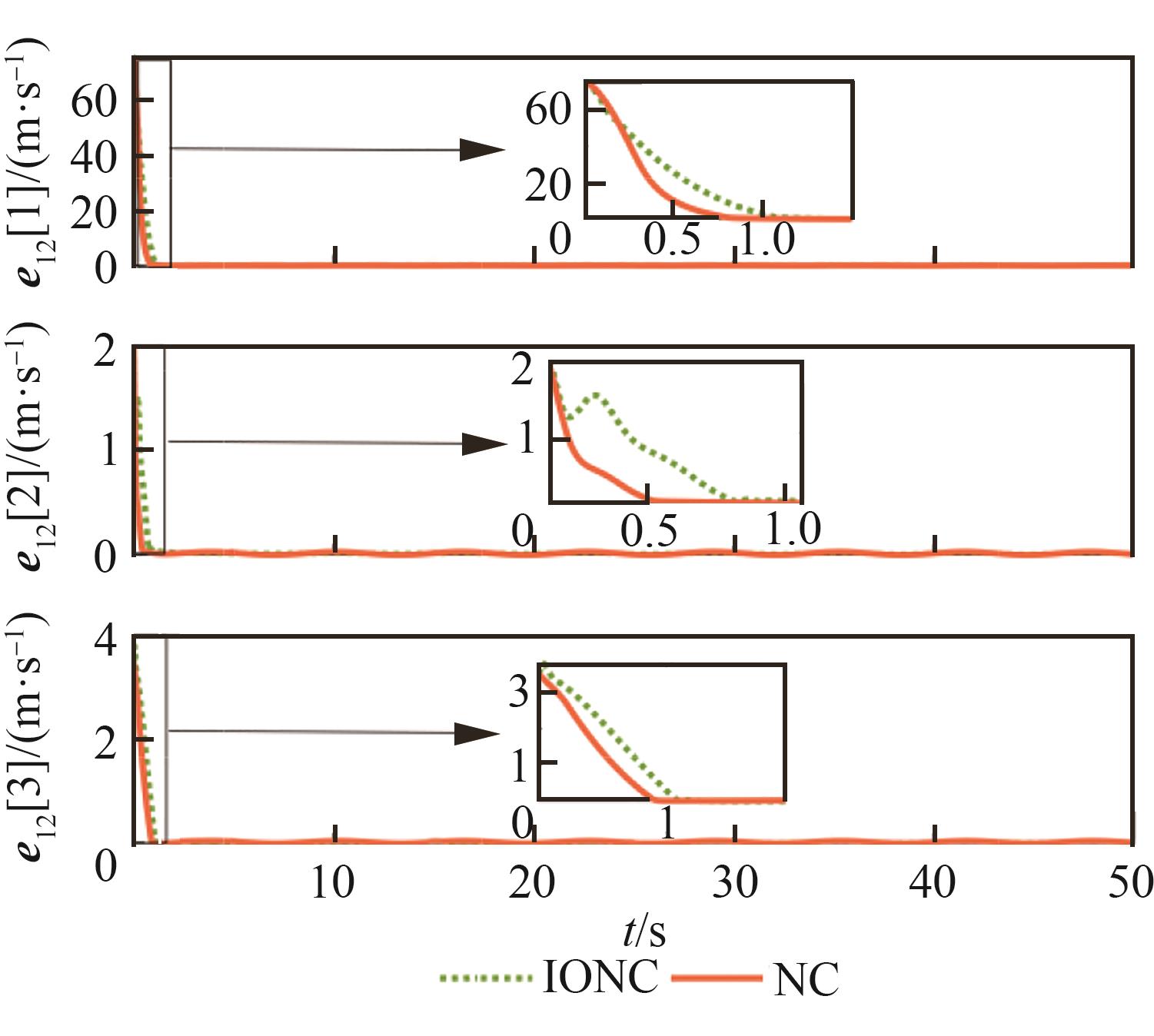
Fig. 21
Nussbaum signal ξ1

| 1 | CHANG K, MA D L, HAN X B, et al. Lyapunov vector-based formation tracking control for unmanned aerial vehicles with obstacle/collision avoidance[J]. Transactions of the Institute of Measurement and Control, 2020, 42(5): 942-950. |
| 2 | WANG X K, YU Y G, LI Z K. Distributed sliding mode control for leader-follower formation flight of fixed-wing unmanned aerial vehicles subject to velocity constraints[J]. International Journal of Robust and Nonlinear Control, 2021, 31(6): 2110-2125. |
| 3 | SUN Y B, XIA K W, ZOU Y, et al. Distributed output-feedback formation tracking control for clustered quadrotors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(3): 1894-1905. |
| 4 | WU Y, GOU J Z, HU X T, et al. A new consensus theory-based method for formation control and obstacle avoidance of UAVs[J]. Aerospace Science and Technology, 2020, 107: 106332. |
| 5 | LIU Y C, BUCKNALL R. A survey of formation control and motion planning of multiple unmanned vehicles[J]. Robotica, 2018, 36(7): 1019-1047. |
| 6 | BAI G H, LI Y J, FANG Y N, et al. Network approach for resilience evaluation of a UAV swarm by considering communication limits[J]. Reliability Engineering & System Safety, 2020, 193: 106602. |
| 7 | YU Z Q, LIU Z X, ZHANG Y M, et al. Distributed finite-time fault-tolerant containment control for multiple unmanned aerial vehicles[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(6): 2077-2091. |
| 8 | WANG X Y, LI S H, SHI P. Distributed finite-time containment control for double-integrator multiagent systems[J]. IEEE Transactions on Cybernetics, 2014, 44(9): 1518-1528. |
| 9 | WANG D, ZHANG N, WANG J L, et al. Cooperative containment control of multiagent systems based on follower observers with time delay[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(1): 13-23. |
| 10 | WANG Y J, SONG Y D, REN W. Distributed adaptive finite-time approach for formation-containment control of networked nonlinear systems under directed topology[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(7): 3164-3175. |
| 11 | 魏志强, 翁哲鸣, 化永朝, 等. 切换拓扑下异构无人集群编队-合围跟踪控制[J]. 航空学报, 2023, 44(2): 258-273. |
| WEI Z Q, WENG Z M, HUA Y Z, et al. Formation-containment tracking control for heterogeneous unmanned swarm systems with switching topologies[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(2): 258-273 (in Chinese). | |
| 12 | LIANG S J, ZHANG S R, HUANG Y P, et al. Data-driven fault diagnosis of FW-UAVs with consideration of multiple operation conditions[J]. ISA Transactions, 2022, 126: 472-485. |
| 13 | IJAZ S, CHEN F Y, TARIQ HAMAYUN M. A new actuator fault-tolerant control for Lipschitz nonlinear system using adaptive sliding mode control strategy[J]. International Journal of Robust and Nonlinear Control, 2021, 31(6): 2305-2333. |
| 14 | ZOU Y, XIA K W. Robust fault-tolerant control for underactuated takeoff and landing UAVs[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(5): 3545-3555. |
| 15 | ZOU Y, XIA K W, HE W. Adaptive fault-tolerant distributed formation control of clustered vertical takeoff and landing UAVs[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(2): 1069-1082. |
| 16 | XU D Z, JIANG B, SHI P. Robust NSV fault-tolerant control system design against actuator faults and control surface damage under actuator dynamics[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5919-5928. |
| 17 | HUO B Y, XIA Y Q, YIN L J, et al. Fuzzy adaptive fault-tolerant output feedback attitude-tracking control of rigid spacecraft[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(8): 1898-1908. |
| 18 | LIU K, WANG R J, WANG X D, et al. Anti-saturation adaptive finite-time neural network based fault-tolerant tracking control for a quadrotor UAV with external disturbances[J]. Aerospace Science and Technology, 2021, 115: 106790. |
| 19 | YU Z Q, ZHANG Y M, JIANG B, et al. Nussbaum-based finite-time fractional-order backstepping fault-tolerant flight control of fixed-wing UAV against input saturation with hardware-in-the-loop validation[J]. Mechanical Systems and Signal Processing, 2021, 153: 107406. |
| 20 | UTKIN V I, POZNYAK A S. Adaptive sliding mode control with application to super-twist algorithm: Equivalent control method[J]. Automatica, 2013, 49(1): 39-47. |
| 21 | YU Z Q, QU Y H, ZHANG Y M. Fault-tolerant containment control of multiple unmanned aerial vehicles based on distributed sliding-mode observer[J]. Journal of Intelligent & Robotic Systems, 2019, 93(1): 163-177. |
| 22 | MA L, ZONG G D, ZHAO X D, et al. Observed-based adaptive finite-time tracking control for a class of nonstrict-feedback nonlinear systems with input saturation[J]. Journal of the Franklin Institute, 2020, 357(16): 11518-11544. |
| 23 | ZHAO S Y, PAN Y N, DU P H, et al. Adaptive control for non-affine nonlinear systems with input saturation and output dead zone[J]. Applied Mathematics and Computation, 2020, 386: 125506. |
| 24 | CHEN M, GE S S, REN B B. Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints[J]. Automatica, 2011, 47(3): 452-465. |
| 25 | LU K F, XIA Y Q, FU M Y. Controller design for rigid spacecraft attitude tracking with actuator saturation[J]. Information Sciences, 2013, 220: 343-366. |
| 26 | ZOU A M, DE RUITER A H J, KUMAR K D. Comment on “Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints”[J] Automatica, 2019, 100: 417-418. |
| 27 | SU Y. Comments on “Controller design for rigid space-craft attitude tracking with actuator saturation”[J]. Information Sciences, 2016, 342: 150-152. |
| 28 | HU Q L, SHAO X D, ZHANG Y M, et al. Nussbaum-type function-based attitude control of spacecraft with actuator saturation[J]. International Journal of Robust and Nonlinear Control, 2018, 28(8): 2927-2949. |
| 29 | YU Z Q, ZHANG Y M, JIANG B, et al. Fault-tolerant time-varying elliptical formation control of multiple fixed-wing UAVs for cooperative forest fire monitoring[J]. Journal of Intelligent & Robotic Systems, 2021, 101(3): 48. |
| 30 | YU J P, SHI P, LIN C, et al. Adaptive neural command filtering control for nonlinear MIMO systems with saturation input and unknown control direction[J]. IEEE Transactions on Cybernetics, 2020, 50(6): 2536-2545. |
| 31 | SUN L. Adaptive fault-tolerant constrained control of cooperative spacecraft rendezvous and docking[J]. IEEE Transactions on Industrial Electronics, 2020, 67(4): 3107-3115. |
| [1] | Jie LI, Wenxin HUANG, Yiming CAI, Siyuan WANG, Yufei GAO, Xuefeng JIANG. Fault diagnosis and fault tolerant control of position sensor based on DFPMM [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 329307-329307. |
| [2] | Zhongsen WANG, Yuxin LIAO, Caisheng WEI, Ting DAI. Fast terminal sliding mode fault⁃tolerant control of hypersonic vehicle with guaranteed performance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476-328476. |
| [3] | Zhiqiang WEI, Zheming WENG, Yongzhao HUA, Xiwang DONG, Zhang REN. Formation-containment tracking control for heterogeneous unmanned swarm systems with switching topologies [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 326504-326504. |
| [4] | Haolan CHEN, Peng WANG, Guojian TANG. Attitude control scheme for morphing vehicles with output error constraints and input saturation [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528762-528762. |
| [5] | Chuang XU, Baolin WU. Distributed fixed-time output-feedback attitude consensus control for multiple spacecraft with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327465-327465. |
| [6] | Wanli ZHAO, Yingqing GUO, Kejie XU, Cansen WANG, Haojie YING, Xinxin TAO. Review of key technologies for fault diagnosis and accommodation for multi⁃electric distributed engine control system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 27519-027519. |
| [7] | YANG Xiaowei, GE Yaowen, DENG Wenxiang, YAO Jianyong, ZHOU Ning. Active fault-tolerant control for hydraulic actuating cylinders of aeroengine guide vane control mechanisms [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 625464-625464. |
| [8] | HU Qinglei, SHAO Xiaodong, YANG Haoyang, DUAN Chao. Spacecraft attitude planning and control under multiple constraints: Review and prospects [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(10): 527351-527351. |
| [9] | LIANG Xiaohui, HU Changhua, ZHOU Zhijie, WANG Qing. ADP-based intelligent attitude fault-tolerant control for launch vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524915-524915. |
| [10] | LIU Deyuan, LIU Hao, Frank L LEWIS. Robust fault-tolerant formation control for tail-sitters [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(2): 324296-324296. |
| [11] | LU Yao. Backstepping control for hypersonic flight vehicles based on tracking differentiator [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524737-524737. |
| [12] | DING Yibo, YUE Xiaokui, DAI Honghua, CUI Naigang. Prescribed performance controller for flexible air-breathing hypersonic vehicle with considering inlet airflow constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524838-524838. |
| [13] | JIANG Bin, ZHANG Ke, YANG Hao, CHENG Yuehua, MA Yajie, CHENG Wanglei. Fault-tolerant control of satellite attitude control systems: Review [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524662-524662. |
| [14] | MEI Yafei, LIAO Ying, GONG Kejie, LUO Da. Fixed-time fault-tolerant control for coupled spacecraft on SE(3) [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 525089-525089. |
| [15] | SI Binqiang, HUANG Yuping, ZHU Jihong, YU Hang. Active reconfigurable and fault-tolerant control technology for high reliability motor system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524853-524853. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 193
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 628
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341