Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (1): 629233-629233.doi: 10.7527/S1000-6893.2023.29233
• Special Topic: Fully Actuated System Theory and Its Applications in Aerospace Field • Previous Articles Next Articles
Qingrui ZHANG, Yunyun LIU, Huijie SUN, Bo ZHU( )
)
Received:2023-06-28
Revised:2023-09-04
Accepted:2023-10-07
Online:2024-01-15
Published:2023-10-24
Contact:
Bo ZHU
E-mail:zhubo5@mail.sysu.edu.cn
Supported by:CLC Number:
Qingrui ZHANG, Yunyun LIU, Huijie SUN, Bo ZHU. Robust cooperative tracking control for close formation of fixed⁃wing unmanned aerial vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629233-629233.

Fig.1
Integrated control framework

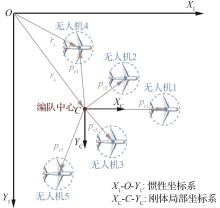
Fig.2
Geometric description of virtual structure


Fig.3
Robust cooperative formation control framework

Table 1
Model parameters of unmanned aerial vehicles
| 参数 | 取值 |
|---|---|
| 质量/kg | 0.553 |
| 空气密度/(kg·m-3) | 1.225 |
| 机翼面积/m2 | 0.213 5 |
| 重力加速度/(m·s-2) | 9.81 |
| 翼展长度/m | 1.37 |
| 纵横比 |     |
| 奥斯瓦尔德效率 |     |
| 常量K |  |
   | 4.2 |
| 推力/重力 | 0.7(假设) |
| 寄生阻力常数 | 0.01 |

Fig.4
Optimal formation and communication topology
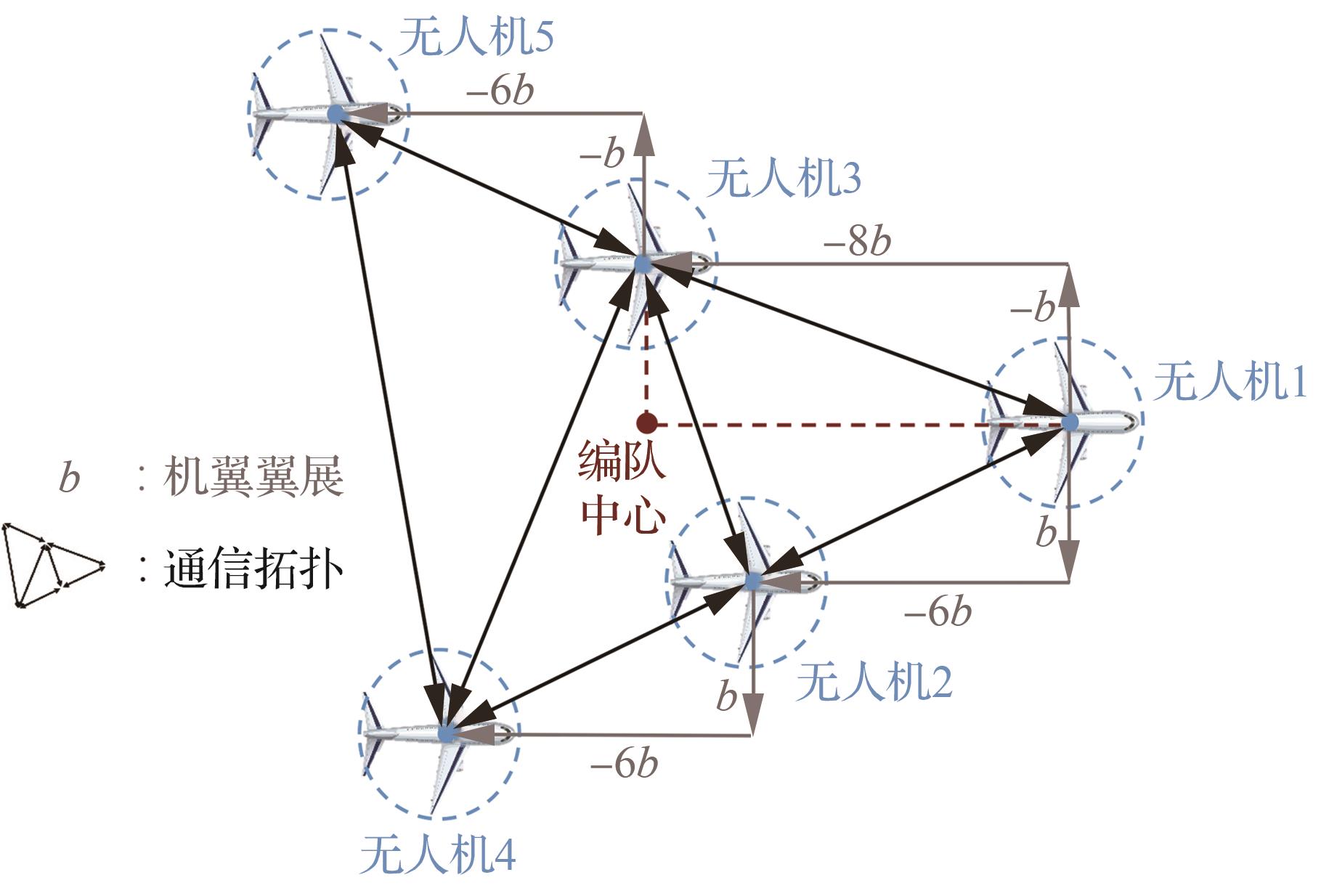
Table 2
Initial conditions of unmanned aerial vehicles
| 无人机编号 | 位置/m | 速度
| 飞行路径角
| 航向角
| ||
|---|---|---|---|---|---|---|
| x | y | z | ||||
| 1 | 8 | 0 | -151 | 9 | 0 | 0 |
| 2 | 2 | -1 | -152 | 10 | 0 |     |
| 3 | 0 | 1 | -148 | 9 | 0 | 0 |
| 4 | -4 | -2 | -149 | 8 | 0 | |
| 5 | -6 | 2 | -147 | 9 | 0 | 0 |
Table 3
Baseline control parameters
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
   | 0.25 | | 0.03 |
 | 0.5 | | 0.03 |
 | 0.3 | | 0.03 |
 | 1.5 | | 0.33 |
| 1.75 | | 0.33 |
| 1.75 | | 0.33 |
Fig.5
Trajectory tracking response of unmanned aerial vehicles
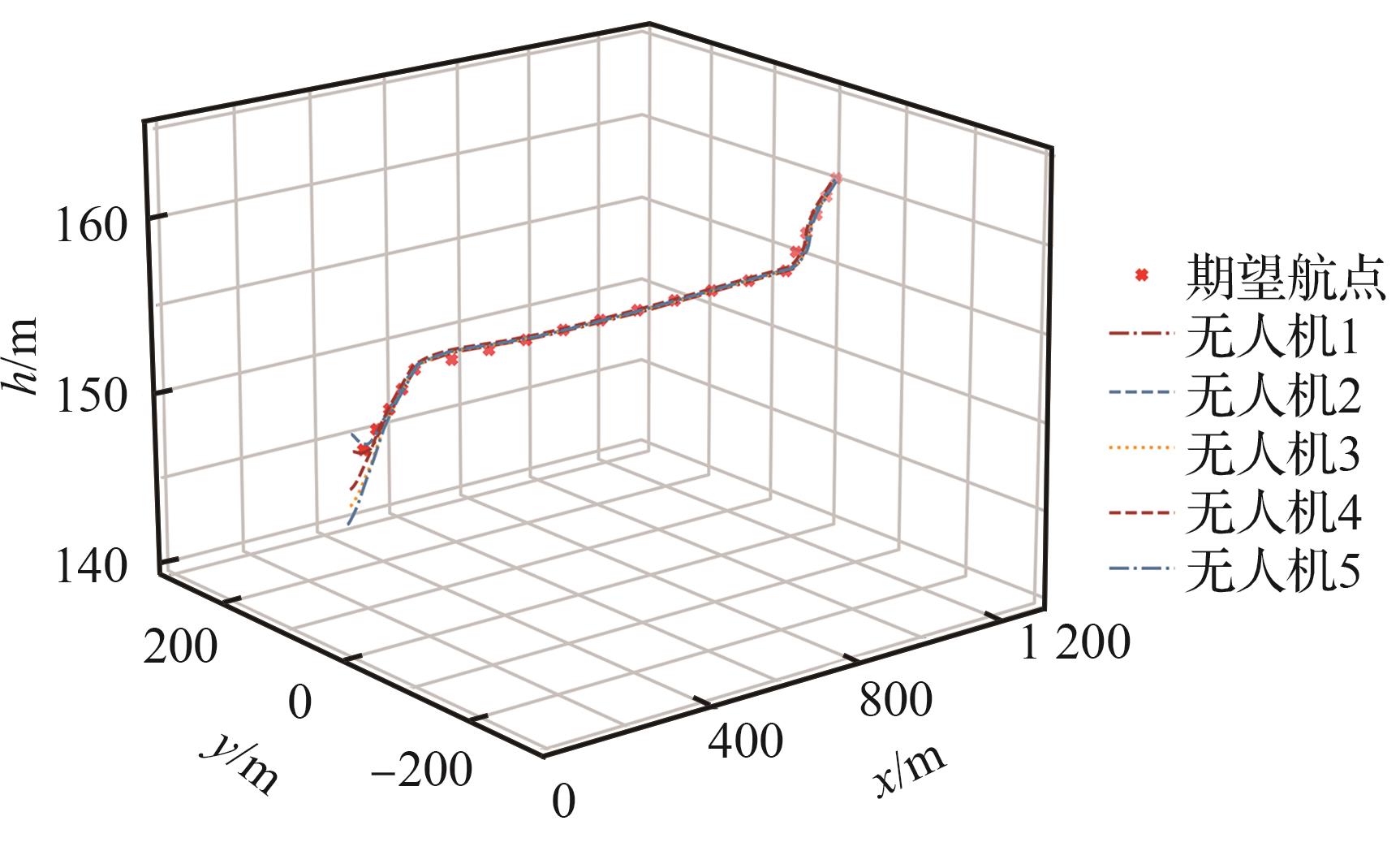

Fig.6
Formation of unmanned aerial vehicles in a simulation environment

Fig.7
Position tracking error
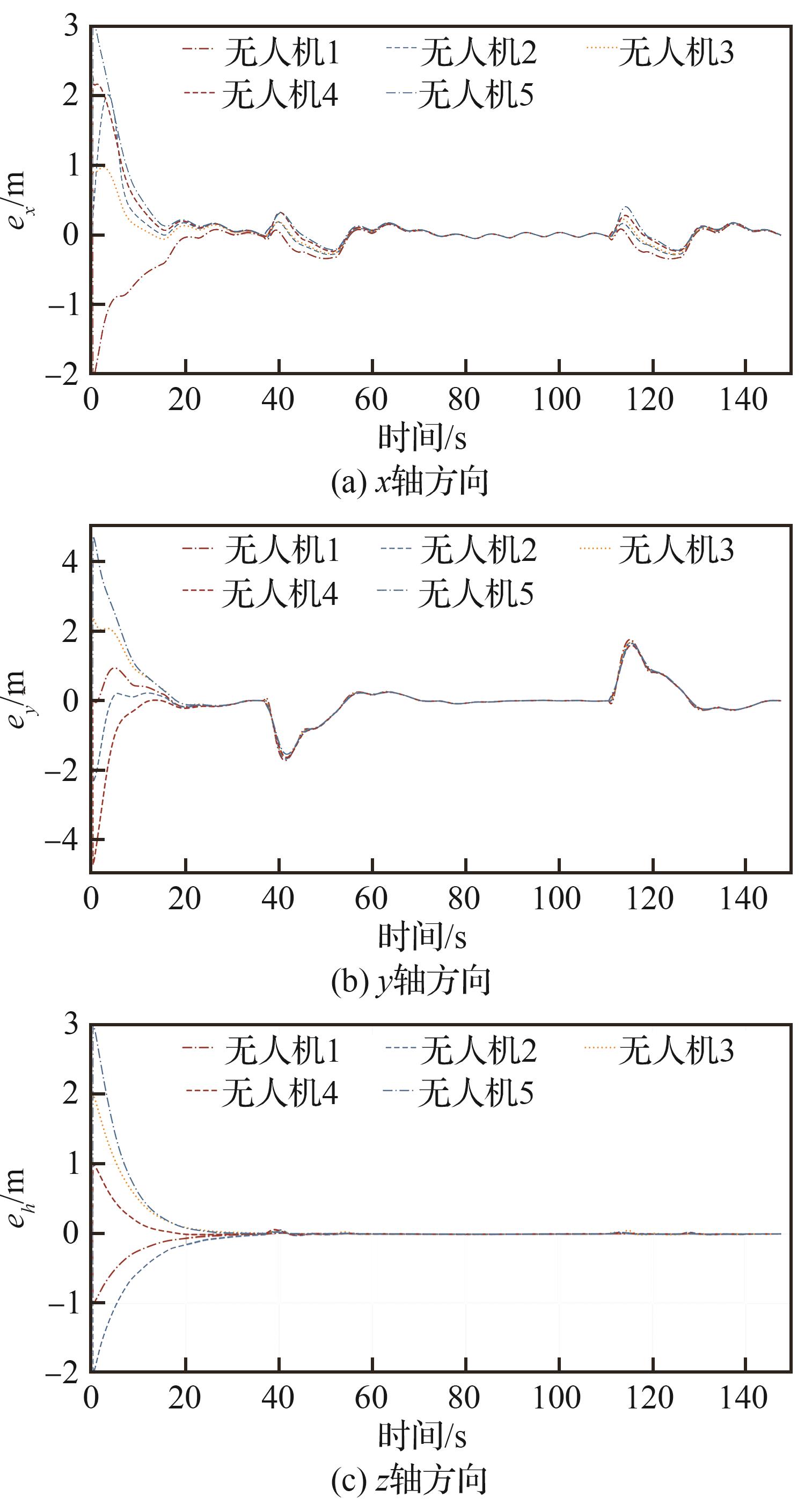

Fig.8
Position tracking error without uncertainty and disturbance estimation

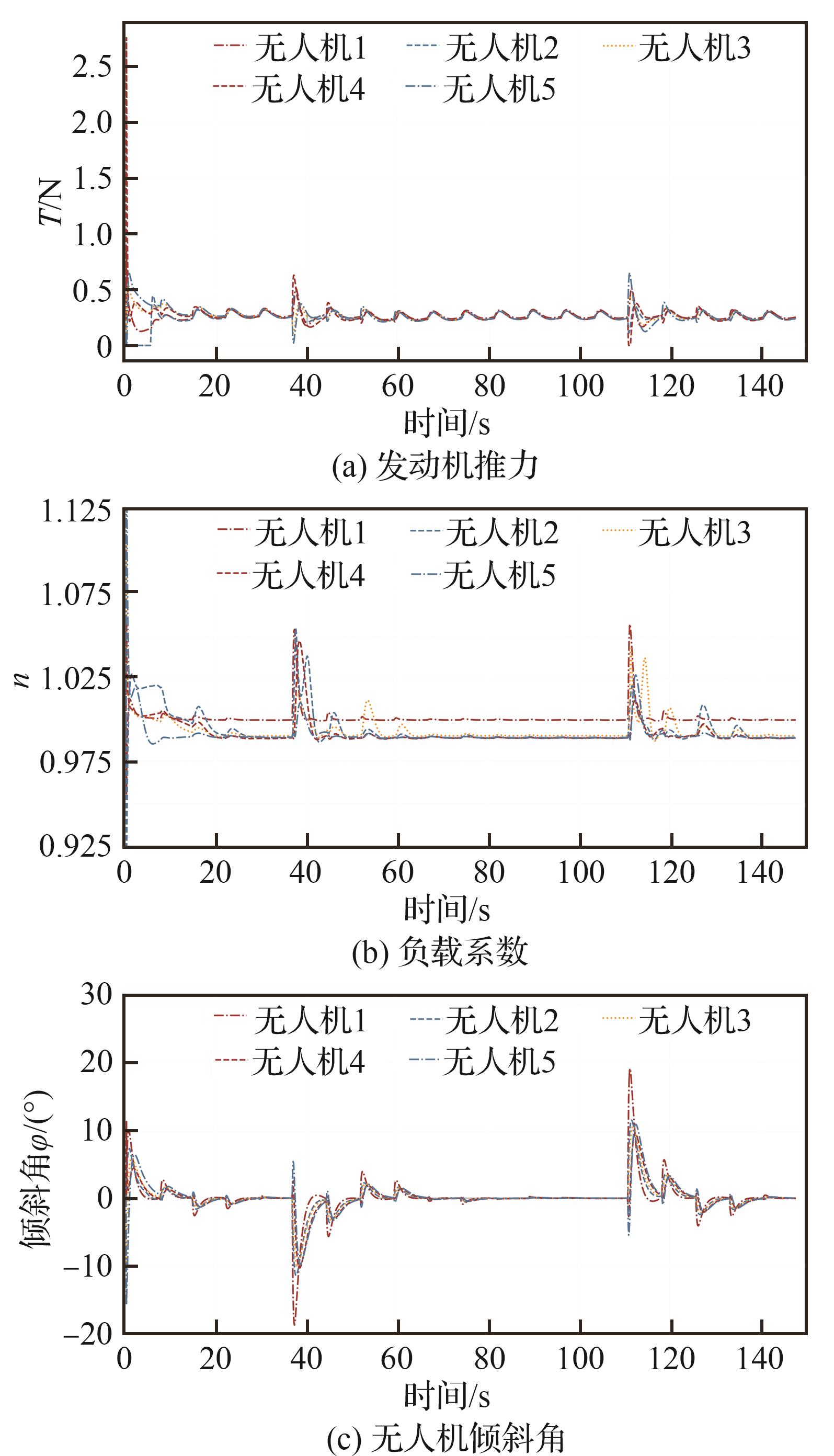
Fig.9
Control inputs for each unmanned aerial vehicle
| 1 | PAHLE J, BERGER D, VENTI M, et al. An initial flight investigation of formation flight for drag reduction on the C-17 aircraft: AIAA-2012-4802[R]. Reston: AIAA, 2012. |
| 2 | BIENIAWSKI S R, ROSENZWEIG S, BLAKE W B. Summary of flight testing and results for the formation flight for aerodynamic benefit program: AIAA-2014-1467[R]. Reston: AIAA, 2014. |
| 3 | 朱旭, 张逊逊, 尤谨语, 等. 基于信息一致性的无人机紧密编队集结控制[J]. 航空学报, 2015, 36(12): 3919-3929. |
| ZHU X, ZHANG X X, YOU J Y, et al. Swarm control of UAV close formation based on information consensus[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(12): 3919-3929 (in Chinese). | |
| 4 | ZHANG Q R, LIU H H T. Aerodynamics modeling and analysis of close formation flight[J]. Journal of Aircraft, 2017, 54(6): 2192-2204. |
| 5 | GU Y, SEANOR B, CAMPA G, et al. Design and flight testing evaluation of formation control laws[J]. IEEE Transactions on Control Systems Technology, 2006, 14(6): 1105-1112. |
| 6 | CHICHKA D F, SPEYER J L, FANTI C, et al. Peak-seeking control for drag reduction in formation flight[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(5): 1221-1230. |
| 7 | BRODECKI M, SUBBARAO K. Autonomous formation flight control system using in-flight sweet-spot estimation[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(6): 1083-1096. |
| 8 | ZHANG Q R, LIU H H T. Aerodynamic model-based robust adaptive control for close formation flight[J]. Aerospace Science and Technology, 2018, 79: 5-16. |
| 9 | ZHANG Q R, LIU H H T. UDE-based robust command filtered backstepping control for close formation flight[J]. IEEE Transactions on Industrial Electronics, 2018, 65(11): 8818-8827. |
| 10 | 王晶, 顾维博, 窦立亚. 基于Leader-Follower的多无人机编队轨迹跟踪设计[J]. 航空学报, 2020, 41(S1): 723758. |
| WANG J, GU W B, DOU L Y. Leader-Follower formation control of multiple UAVs with trajectory tracking design[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723758 (in Chinese). | |
| 11 | PACHTER M, D’AZZO J J, PROUD A W. Tight formation flight control[J]. Journal of Guidance, Control, and Dynamics, 2001, 24(2): 246-254. |
| 12 | DOGAN A, VENKATARAMANAN S. Nonlinear control for reconfiguration of unmanned-aerial-vehicle formation[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(4): 667-678. |
| 13 | ALMEIDA F. Tight formation flight with feasible model predictive control: AIAA-2015-0602[R]. Reston: AIAA, 2015. |
| 14 | OLFATI-SABER R, FAX J A, MURRAY R M. Consensus and cooperation in networked multi-agent systems[J]. Proceedings of the IEEE, 2007, 95(1): 215-233. |
| 15 | OH K K, PARK M C, AHN H S. A survey of multi-agent formation control[J]. Automatica, 2015, 53: 424-440. |
| 16 | YANG R H, ZHANG H, FENG G, et al. Robust cooperative output regulation of multi-agent systems via adaptive event-triggered control[J]. Automatica, 2019, 102: 129-136. |
| 17 | DIMAROGONAS D V, LOIZOU S G, KYRIAKOPO⁃ ULOS K J, et al. A feedback stabilization and collision avoidance scheme for multiple independent non-point agents[J]. Automatica, 2006, 42(2): 229-243. |
| 18 | DIMAROGONAS D V, KYRIAKOPOULOS K J. On the rendezvous problem for multiple nonholonomic agents[J]. IEEE Transactions on Automatic Control, 2007, 52(5): 916-922. |
| 19 | SUN Z Y, ANDERSON B D O, DEGHAT M, et al. Rigid formation control of double-integrator systems[J]. International Journal of Control, 2017, 90(7): 1403-1419. |
| 20 | DEGHAT M, ANDERSON B D O, LIN Z Y. Combined flocking and distance-based shape control of multi-agent formations[J]. IEEE Transactions on Automatic Control, 2016, 61(7): 1824-1837. |
| 21 | LAWTON J R T, BEARD R W, YOUNG B J. A decentralized approach to formation maneuvers[J]. IEEE Transactions on Robotics and Automation, 2003, 19(6): 933-941. |
| 22 | BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE Transactions on Robotics and Automation, 1998, 14(6): 926-939. |
| 23 | EGERSTEDT M, HU X, STOTSKY A. Control of mobile platforms using a virtual vehicle approach[J]. IEEE Transactions on Automatic Control, 2001, 46(11): 1777-1782. |
| 24 | DONG X W, ZHOU Y, REN Z, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5014-5024. |
| 25 | REN W, BEARD R W. A decentralized scheme for spacecraft formation flying via the virtual structure approach[C]∥ Proceedings of the 2003 American Control Conference. Piscataway: IEEE Press, 2003: 1746-1751. |
| 26 | SADOWSKA A, VAN DEN BROEK T, HUIJBERTS H, et al. A virtual structure approach to formation control of unicycle mobile robots using mutual coupling[J]. International Journal of Control, 2011, 84(11): 1886-1902. |
| 27 | REZAEE H, ABDOLLAHI F. A decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots[J]. IEEE Transactions on Industrial Electronics, 2014, 61(1): 347-354. |
| 28 | 吴宇, 梁天骄. 基于改进一致性算法的无人机编队控制[J]. 航空学报, 2020, 41(9): 323848. |
| WU Y, LIANG T J. Improved consensus-based algorithm for unmanned aerial vehicle formation control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): 323848 (in Chinese). | |
| 29 | LAFFERRIERE G, WILLIAMS A, CAUGHMAN J, et al. Decentralized control of vehicle formations[J]. Systems & Control Letters, 2005, 54(9): 899-910. |
| 30 | WANG J N, XIN M. Integrated optimal formation control of multiple unmanned aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2013, 21(5): 1731-1744. |
| 31 | DONG X W, ZHOU Y, REN Z, et al. Time-varying formation control for unmanned aerial vehicles with switching interaction topologies[J]. Control Engineering Practice, 2016, 46: 26-36. |
| 32 | DIESTEL R. Graph theory[M]. 2nd ed. Berlin: Springer, 2000. |
| 33 | GODSIL C, ROYLE G. Algebraic graph theory[M]. New York: Springer New York, 2001. |
| 34 | MERRIS R. Laplacian matrices of graphs: A survey[J]. Linear Algebra and Its Applications, 1994, 197-198: 143-176. |
| 35 | 段广仁. 高阶系统方法: I.全驱系统与参数化设计[J]. 自动化学报, 2020, 46(7): 1333-1345. |
| DUAN G R. High-order system approaches: I. Fully-actuated systems and parametric designs[J]. Acta Automatica Sinica, 2020, 46(7): 1333-1345 (in Chinese). | |
| 36 | DUAN G R. High-order fully actuated system approaches: Part I. Models and basic procedure[J]. International Journal of Systems Science, 2021, 52(2): 422-435. |
| 37 | KERRIGAN E C. Predictive control for linear and hybrid systems bookshelf[J]. IEEE Control Systems Magazine, 2018, 38(2): 94-96. |
| 38 | GARCÍA C E, PRETT D M, MORARI M. Model predictive control: Theory and practice—A survey[J]. Automatica, 1989, 25(3): 335-348. |
| 39 | CHEN J Y, ZHAN W, TOMIZUKA M. Constrained iterative LQR for on-road autonomous driving motion planning[C]∥ 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). New York: ACM, 2017: 1-7. |
| 40 | GU D B, JASIM W. Iterative linear quadratic regulator control for quadrotors leader-follower formation flight[J]. International Journal of Modelling, Identification and Control, 2019, 31(2): 152. |
| 41 | KHALIL H K. Nonlinear Systems, 3rd ed. Prentice Hall, 2001. |
| 42 | ZHONG Q C, REES D. Control of uncertain LTI systems based on an uncertainty and disturbance estimator[J]. Journal of Dynamic Systems, Measurement, and Control, 2004, 126(4): 905-910. |
| 43 | ZHU B, ZHANG Q R, LIU H H T. A comparative study of robust attitude synchronization controllers for multiple 3-DOF helicopters[C]∥ 2015 American Control Conference (ACC). Piscataway: IEEE Press, 2015: 5960-5965. |
| 44 | ZHU B, ZHANG Q R, LIU H H T. Design and experimental evaluation of robust motion synchronization control for multivehicle system without velocity measurements[J]. International Journal of Robust and Nonlinear Control, 2018, 28(17): 5437-5463. |
| 45 | ZHU B, MENG C, HU G Q. Robust consensus tracking of double-integrator dynamics by bounded distributed control[J]. International Journal of Robust and Nonlinear Control, 2016, 26(7): 1489-1511. |
| 46 | ZHANG T, LI S Y, ZHU B, et al. TV-UDE: Time-varying uncertainty and disturbance estimator[J]. International Journal of Robust and Nonlinear Control, 2023, 33(16): 9579-9601. |
| 47 | ZHU B, LIU H H T, LI Z. Robust distributed attitude synchronization of multiple three-DOF experimental helicopters[J]. Control Engineering Practice, 2015, 36: 87-99. |
| [1] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [2] | Xiaoyun SUN, Shufan WU, Qiang SHEN. LMI-based output tracking robust drag-free control with model reference adaptive scheme [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727654-727654. |
| [3] | Xinyu ZHANG, Siyu XIE, Yang TAO, Gun LI. A robust control method for close formation of aerial-refueling UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628425-628425. |
| [4] | Yongxing TANG, Zhanxia ZHU, Hongwen ZHANG, Jianjun LUO, Jianping YUAN. A tutorial and review on robot motion planning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 26495-026495. |
| [5] | Xiao MENG, Dan MA, Hongjun LIN, Chao CHEN. Prescribed performance control of thermoacoustic instability in aero-engine combustion chambers [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 128182-128182. |
| [6] | Zikang SU, Haitong CHEN, Chuntao LI, Zhuolin XING, Honglun WANG. Coordinating motion planning for towed cable system in UAV aerial recovery with unmatched envelope [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327377-327377. |
| [7] | YANG Xiaowei, GE Yaowen, DENG Wenxiang, YAO Jianyong, ZHOU Ning. Active fault-tolerant control for hydraulic actuating cylinders of aeroengine guide vane control mechanisms [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 625464-625464. |
| [8] | XIANG Jinwu, DONG Xiwang, DING Wenrui, SUO Jinli, SHEN Lincheng, XIA Hui. Key technologies for autonomous cooperation of unmanned swarm systems in complex environments [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(10): 527570-527570. |
| [9] | LIU Deyuan, LIU Hao, Frank L LEWIS. Robust fault-tolerant formation control for tail-sitters [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(2): 324296-324296. |
| [10] | LIU Hao, WANG Wei, JIN Wei, NIU Wenchao, YANG Zhichun. Experiments of RFxLMS control for vertical tail buffeting [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(2): 224090-224090. |
| [11] | LIU Fucheng, ZHU Dongfang. Distributed coordinated control for large flexible truss antenna considering connection nonlinearity [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524890-524890. |
| [12] | QIN Ripeng, XU Kun, CHEN Jiawei, HAN Liangliang, DING Xilun. Design and motion planning of wheel-legged hexapod robot for planetary exploration [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 524244-524244. |
| [13] | YANG Huixin. Cyclic pursuit control method design for spacecraft formation configuration adjustment [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724311-724311. |
| [14] | JIA Yongnan, TIAN Siying, LI Qing. Recent development of unmanned aerial vehicle swarms [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723738-723738. |
| [15] | ZHOU Guangfei, HOU Bochuan, YANG Jianhua, WU Yangfei. Multi-motor control algorithm based on dynamic compensation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723771-723771. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 550
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 806
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341












