ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (10): 327377-327377.doi: 10.7527/S1000-6893.2022.27377
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Zikang SU1, Haitong CHEN1, Chuntao LI1( ), Zhuolin XING1, Honglun WANG2
), Zhuolin XING1, Honglun WANG2
Received:2022-05-05
Revised:2022-05-30
Accepted:2022-06-16
Online:2023-05-25
Published:2022-06-24
Contact:
Chuntao LI
E-mail:lct115@nuaa.edu.cn
Supported by:CLC Number:
Zikang SU, Haitong CHEN, Chuntao LI, Zhuolin XING, Honglun WANG. Coordinating motion planning for towed cable system in UAV aerial recovery with unmatched envelope[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327377-327377.

Fig. 1
Aerial recovery system of UAV with unmatched envelope


Fig. 2
Forces on joint


Fig. 3
Flight path of mothership for transition from straight flight into circular flight


Fig. 4
Drogue trajectory tracking in wind


Fig. 5
Motion planning optimal control problem solved by hp-RPM

Table 1
Parameters of cable and towed drogue[7,29]
| 对象 | 参数 | 数值 |
|---|---|---|
| 缆绳 | 长度 | 1 200 |
| 密度 | 970 | |
| 直径 | 2×10-3 | |
| 弹性模量 | 1.2×1011 | |
| 浮标 | 质量 | 30 |
| 气动面积 | 0.785 | |
| 阻力系数 | 0.42 | |
| 升力系数 | 0.01 | |
Table 2
Constraints of mothership and cable[13,15]
| 对象 | 参数 | 数值 |
|---|---|---|
| 母机 | 空速速率 | [40,100] |
| 航向角速率 | [-0.35,0.35] | |
| 航迹倾斜角 | [-0.35,0.35] | |
| 加速度 | [-6,6] | |
| 缆绳 | 收放长度 | [-300,300] |
| 收放速率 | [-5,5] | |
| 收放加速度 | [-1,1] | |
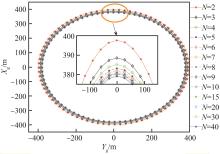
Fig. 6
Hovering drogue trajectory with different cable segments


Fig. 7
Radius and speed of hovering drogue with different segments

Table 3
Parameters for drogue transition into circular flight
| 参数 | 数值 |
|---|---|
| 母机高度 | 2 000 |
| 母机初始速度 | 120 |
| 母机终点速度 | 60 |
| 母机初始半径 | 1 600 |
| 母机终点半径 | 800 |
| 母机直线飞行结束时刻 | 20 |
| 母机过渡飞行结束时刻 | 220 |
| 母机盘旋飞行结束时刻 | 400 |

Fig. 8
Trajectory of towed cable system during drogue transition into circular flight

Table 4
Initial states for mothership motion planning in quiet atmosphere
| 参数 | 母机 | 浮标 |
|---|---|---|
| 位置/m | (-800,0,-2 000) | (144.8,366.0,-1 568.0) |
| 速度/(m·s-1) | (0,-60,0) | (-27.5,10.9,0) |

Fig. 9
Trajectory of circularly towed cable system in quiet atmosphere


Fig. 10
Drogue trajectory tracking errors in quiet atmosphere


Fig. 11
Acceleration of mothership in quiet atmosphere


Fig. 12
Constraint performance of mothership in quiet atmosphere

Table 5
Initial states for mothership motion planning inpresence of 5 m/s wind
| 参数 | 母机 | 浮标 |
|---|---|---|
| 位置/m | (-776.9,-124.1,-1 947.0) | (144.8,366.0,-1 568.0) |
| 速度/(m·s-1) | (-0.1,-49.7,3.2) | (-27.5,10.9,0) |

Fig. 13
Trajectory of circularly towed cable system under 5 m/s wind


Fig. 14
Drogue trajectory tracking errors under 5 m/s wind


Fig. 15
Accelerations of mothership under 5 m/s wind


Fig. 16
Constraint performance of mothership under 5 m/s wind
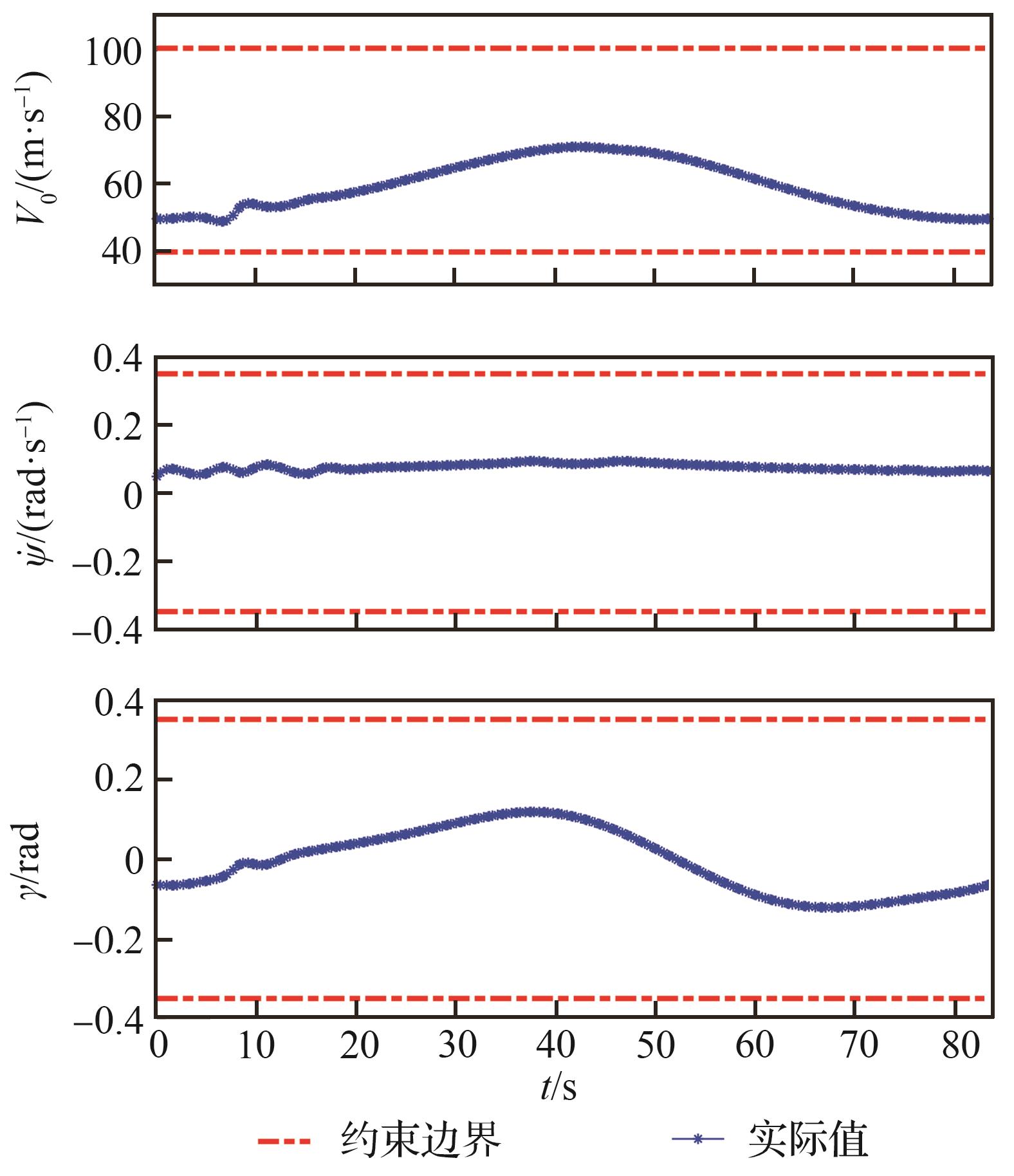

Fig. 17
Trajectory of circularly towed cable system for coordinating motion planning under 5 m/s wind


Fig. 18
Drogue trajectory tracking errors for coordinating motion planning under 5 m/s wind
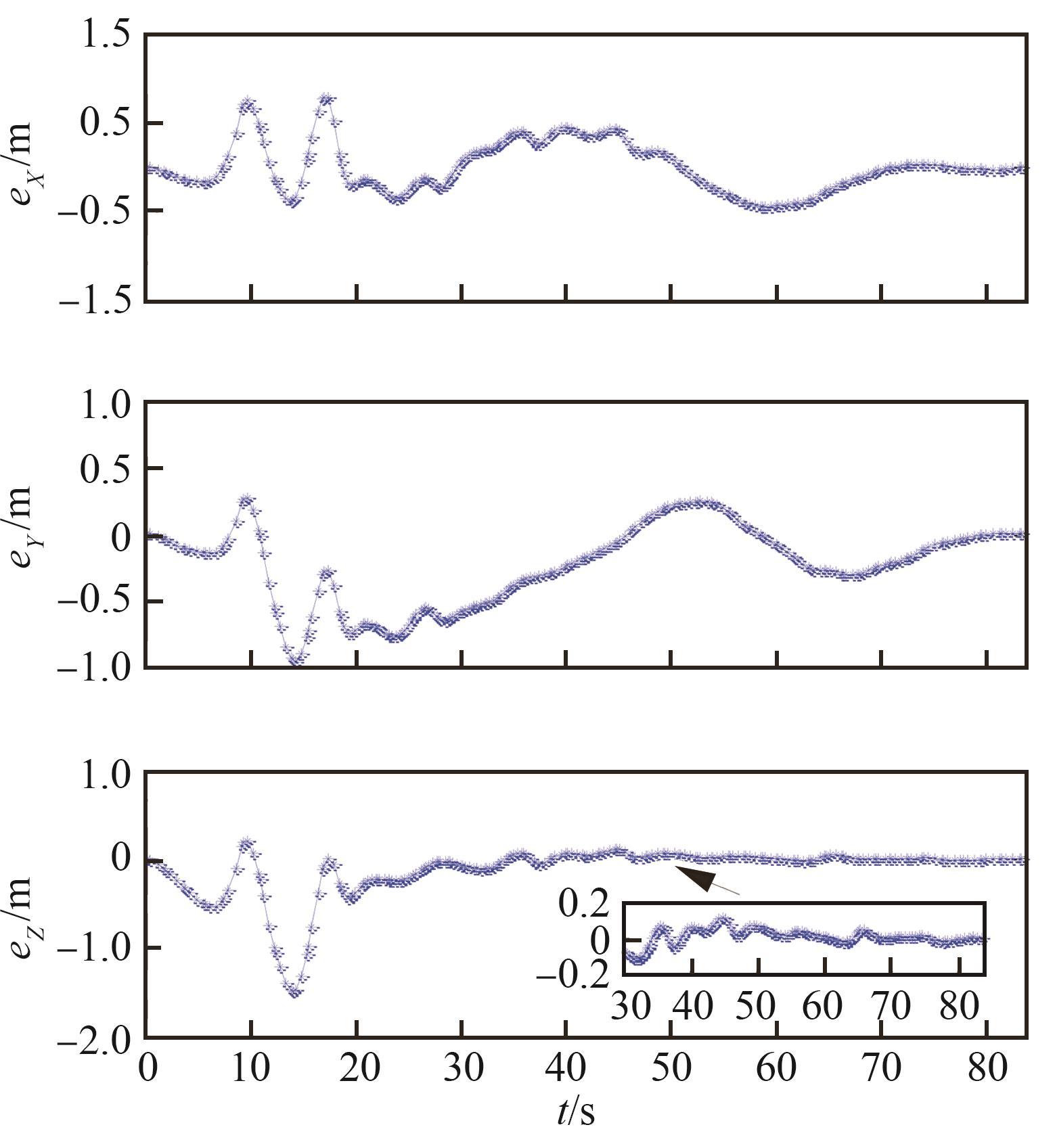

Fig. 19
Acceleration of mothership for coordinating motion planning under 5 m/s wind


Fig. 20
Constraint performance of mothership for coordinating motion planning under 5 m/s wind


Fig. 21
Parameters of cable winch control for coordinating motion planning under 5 m/s wind

| 1 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732. |
| WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732 (in Chinese). | |
| 2 | 苏子康, 徐忠楠, 李春涛, 等. 伸缩套臂式无人机空基回收建模与对接控制[J]. 航空学报, 2023, 44(1): 326315. |
| SU Z K, XU Z N, LI C T, et al. Modeling and docking control of aerial recovery in the form of telescopic boom[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(1): 326315 (in Chinese). | |
| 3 | SU Z K, LI C T, WU J F, et al. Neuro-adaptive prescribed performance control for aerial-recovery drogue with actuator constraints[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(8): 1451-1465. |
| 4 | SU Z K, LIU Y H, WANG H L. Probe dynamics direct control for aerial recovery with preassigned docking performance[J/OL]. IEEE Transactions on Aerospace and Electronic Systems(2022-02-16)[2022-05-03]. . |
| 5 | 曹莉, 耿斌斌, 周亮, 等. 无人机集群发射与回收技术发展研究[J]. 空天防御, 2019, 2(2): 68-72. |
| CAO L, GENG B B, ZHOU L, et al. Research on UAVs launch and recovery technology development[J]. Air & Space Defense, 2019, 2(2): 68-72 (in Chinese). | |
| 6 | SUN L, BEARD R W, COLTON M B. Motion planning and control for mothership-cable-drogue systems in aerial recovery of micro air vehicles[C]∥ Proceedings of the 2010 American Control Conference. Piscataway: IEEE Press, 2010: 2101-2106. |
| 7 | SUN L. Dynamic modeling, trajectory generation and tracking for towed cable systems[D]. Provo: Brigham Young University, 2012: 19-36. |
| 8 | NO T S, COCHRAN J E. Dynamics and control of a tethered flight vehicle[J]. Journal of Guidance, Control, and Dynamics, 1995, 18(1): 66-72. |
| 9 | RO K, KUK T, KAMMAN J. Active control of aerial refueling hose-drogue systems: AIAA-2010-8400[R]. Reston: AIAA, 2010. |
| 10 | SU Z K, LI C T, LIU Y H. Anti-disturbance dynamic surface trajectory stabilization for the towed aerial recovery drogue under unknown airflow disturbances[J]. Mechanical Systems and Signal Processing, 2021, 150: 107342. |
| 11 | WILLIAMS P. Optimization of circularly towed cable system in crosswind[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(4): 1251-1263. |
| 12 | WILLIAMS P, SGARIOTO D, TRIVAILO P. Optimal control of an aircraft-towed flexible cable system[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(2): 401-410. |
| 13 | WILLIAMS P, TRIVAILO P. Dynamics of circularly towed aerial cable systems, Part 2: Transitional flight and deployment control[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 766-779. |
| 14 | SUN L, BEARD R. Towed body altitude stabilization and states estimation in aerial recovery of micro air vehicles: AIAA-2010-8414[R]. Reston: AIAA, 2010. |
| 15 | SUN L, HEDENGREN J D, BEARD R W. Optimal trajectory generation using model predictive control for aerially towed cable systems[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(2): 525-539. |
| 16 | 崔乃刚, 郭冬子, 李坤原, 等. 飞行器轨迹优化数值解法综述[J]. 战术导弹技术, 2020(5): 37-51, 75, 5. |
| CUI N G, GUO D Z, LI K Y, et al. A survey of numerical methods for aircraft trajectory optimization[J]. Tactical Missile Technology, 2020(5): 37-51, 75, 5 (in Chinese). | |
| 17 | 王丽英, 张友安, 赵国荣, 等. 高超声速飞行器再入突防轨迹快速优化[J]. 应用科学学报, 2013, 31(4): 434-440. |
| WANG L Y, ZHANG Y A, ZHAO G R, et al. Rapid optimization of penetration trajectory for hypersonic reentry vehicle[J]. Journal of Applied Sciences, 2013, 31(4): 434-440 (in Chinese). | |
| 18 | 粟建波, 张立丰, 张甲奇. 基于Radau伪谱法的无人作战飞机四维轨迹规划[J]. 飞行力学, 2020, 38(1): 41-45, 53. |
| SU J B, ZHANG L F, ZHANG J Q. 4D trajectory planning of UCAV based on Radau pseudo-spectral method[J]. Flight Dynamics, 2020, 38(1): 41-45, 53 (in Chinese). | |
| 19 | HAN P, SHAN J Y, MENG X Y. Re-entry trajectory optimization using an hp-adaptive Radau pseudospectral method[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2013, 227(10): 1623-1636. |
| 20 | SU Z K, WANG H L. A novel robust hybrid gravitational search algorithm for reusable launch vehicle approach and landing trajectory optimization[J]. Neurocomputing, 2015, 162: 116-127. |
| 21 | SU Z K, WANG H L, YAO P. A hybrid backtracking search optimization algorithm for nonlinear optimal control problems with complex dynamic constraints[J]. Neurocomputing, 2016, 186: 182-194. |
| 22 | 王铀, 赵辉, 惠百斌, 等. 利用Radau伪谱法求解UCAV对地攻击轨迹研究[J]. 电光与控制, 2012, 19(10): 50-53. |
| WANG Y, ZHAO H, HUI B B, et al. Air-to-ground trajectory planning for UCAVs using a Radau pseudo-spectral method[J]. Electronics Optics & Control, 2012, 19(10): 50-53 (in Chinese). | |
| 23 | 黄诘, 张友安, 王丽英. 基于Radau伪谱法的非线性最优控制问题的收敛性[J]. 控制理论与应用, 2014, 31(2): 263-267. |
| HUANG J, ZHANG Y A, WANG L Y. Convergence of nonlinear optimal control problem using Radau pseudospectral method[J]. Control Theory & Applications, 2014, 31(2): 263-267 (in Chinese). | |
| 24 | 王海涛, 李军营, 梁立威, 等. 基于hp自适应Radau伪谱法的再入飞行器轨迹优化[J]. 科学技术与工程, 2015, 15(2): 165-171. |
| WANG H T, LI J Y, LIANG L W, et al. Track optimizing for reentry vehicle based on hp-adaptive Radau pseudospectral method[J]. Science Technology and Engineering, 2015, 15(2): 165-171 (in Chinese). | |
| 25 | ENOMOTO K, YAMASAKI T, TAKANO H, et al. Guidance and control system design for chase UAV: AIAA-2008-6842[R]. Reston: AIAA, 2008. |
| 26 | 李辉, 龙腾, 孙景亮, 等. 基于自适应视线法的无人机三维航迹跟踪方法[J]. 航空学报, 2022, 43(9): 326105. |
| LI H, LONG T, SUN J L, et al. Adaptive line-of-sight method for 3D path following of UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 326105 (in Chinese). | |
| 27 | WILLIAMS P, LAPTHORNE P, TRIVAILO P. Circularly-towed lumped mass cable model validation from experimental data: AIAA-2006-6817[R]. Reston: AIAA, 2006. |
| 28 | 王海涛, 董新民, 郭军, 等. 空中加油软管锥套组合体甩鞭现象动力学建模与分析[J]. 航空学报, 2015, 36(9): 3116-3127. |
| WANG H T, DONG X M, GUO J, et al. Dynamics modeling and analysis of hose whipping phenomenon of aerial refueling hose-drogue assembly[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(9): 3116-3127 (in Chinese). | |
| 29 | WILLIAMS P, TRIVAILO P. Dynamics of circularly towed aerial cable systems, Part I: Optimal configurations and their stability[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 753-765. |
| [1] | Haifeng WANG, Kunpeng LIU, Hongxin JIANG, Chenxi DU. Aerodynamic optimization method of propeller multi⁃design points and variable pitch angle strategy [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 528831-528831. |
| [2] | Jing ZHAO, Dan SONG. Integrity monitoring method for GNSS/IMU integrated navigation system of UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328943-328943. |
| [3] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [4] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [5] | Chuihuan KONG, Dawei WU, Zhaoguang TAN, Lijun PAN, Rubing MA, Jiangtao SI. Design of fully electric scheme for three⁃surface verification aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629618-629618. |
| [6] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [7] | Guangjia LI, Hongbo WANG, Kai ZHANG, Zhisheng YI. Lift enhancement and drag reduction technologies of solar powered unmanned aerial vehicles in near space: Review [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529644-529644. |
| [8] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [9] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [10] | Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816. |
| [11] | Qingrui ZHANG, Yunyun LIU, Huijie SUN, Bo ZHU. Robust cooperative tracking control for close formation of fixed⁃wing unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629233-629233. |
| [12] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [13] | Hongzhen GUO, Mou CHEN, Yongdong DAI, Maofei WANG. Distributed adaptive event⁃triggered formation control for QUAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729917-729917. |
| [14] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [15] | Wenkang HAO, Suyan BAO, Qifeng CHEN. Distributed control of UAVs formation based on port⁃Hamiltonian system [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729868-729868. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 232
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 537
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341