ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (1): 326107-326107.doi: 10.7527/S1000-6893.2021.26107
Previous Articles Next Articles
Yuanliang XUE, Guodong JIN( ), Lining TAN, Jiankun XU
), Lining TAN, Jiankun XU
Received:2021-07-15
Revised:2021-08-03
Accepted:2021-08-23
Online:2023-01-15
Published:2021-08-25
Contact:
Guodong JIN
E-mail:641797825@qq.com
Supported by:CLC Number:
Yuanliang XUE, Guodong JIN, Lining TAN, Jiankun XU. Adaptive UAV target tracking algorithm based on multi-scale fusion[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 326107-326107.

Fig. 1
ResBlock
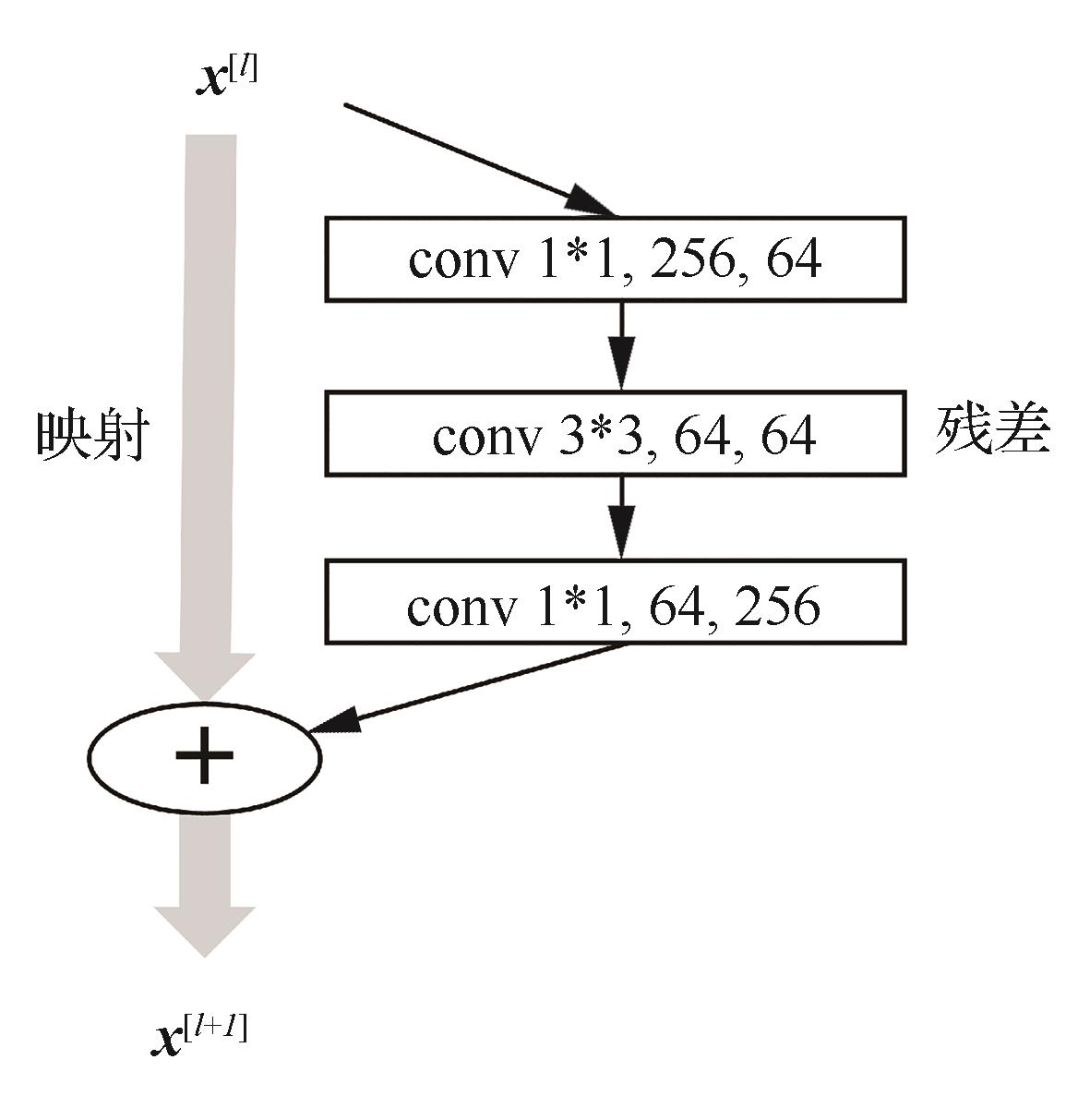
Fig. 2
Architecture of network
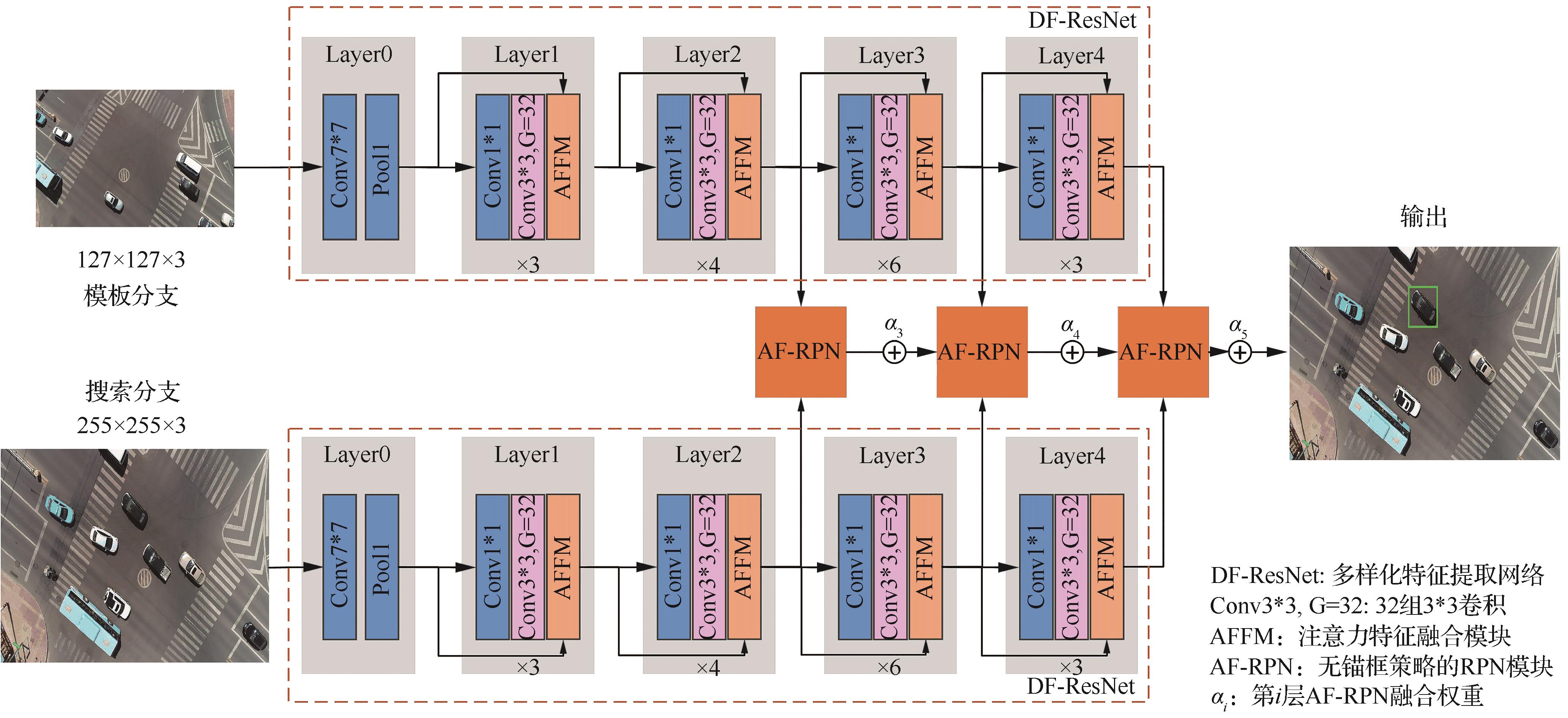
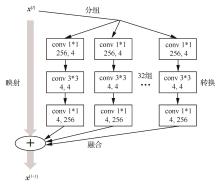
Fig. 3
ResBlock of DF-ResNet
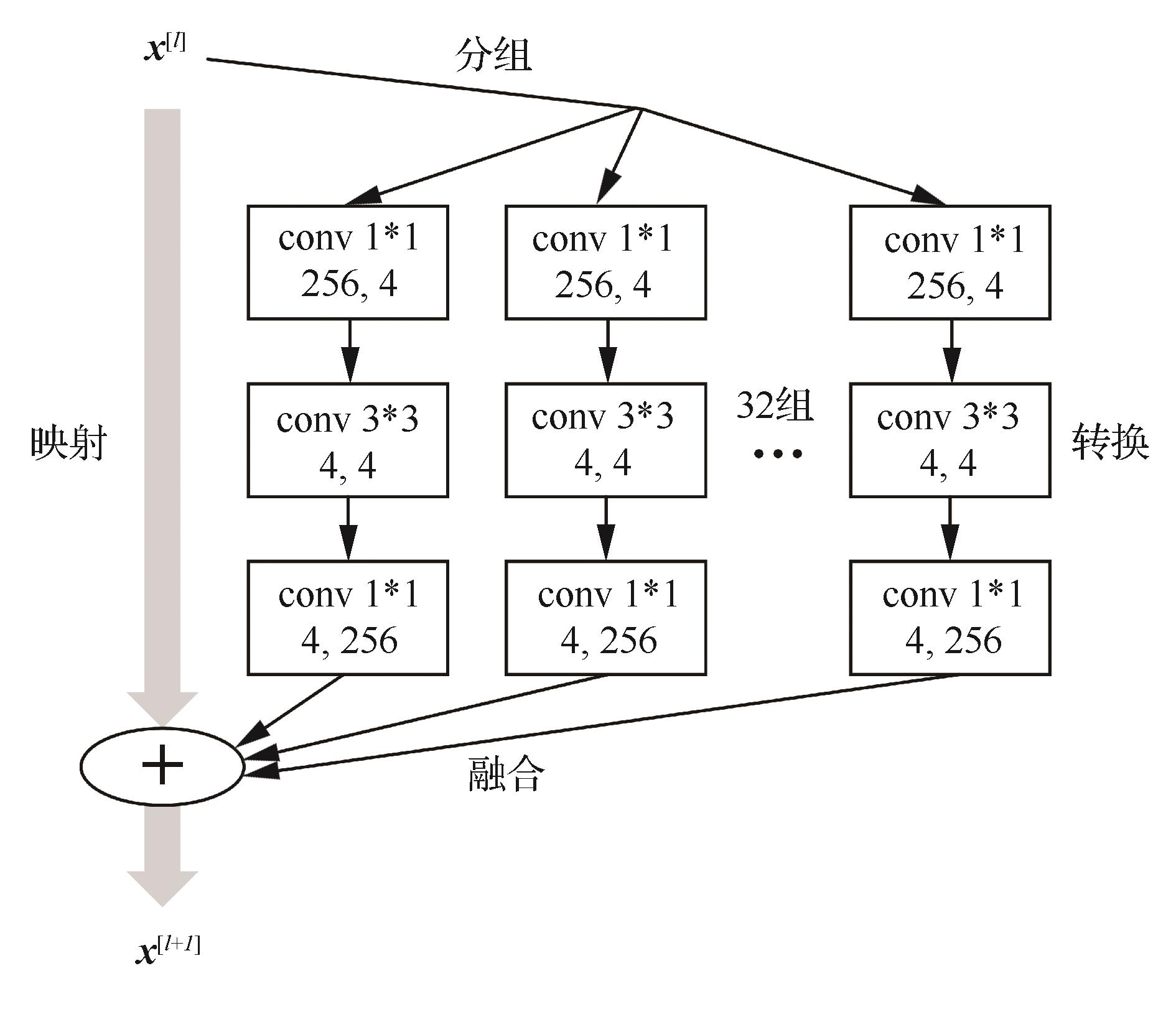
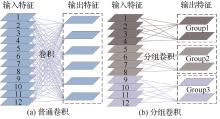
Fig. 4
Convolution process
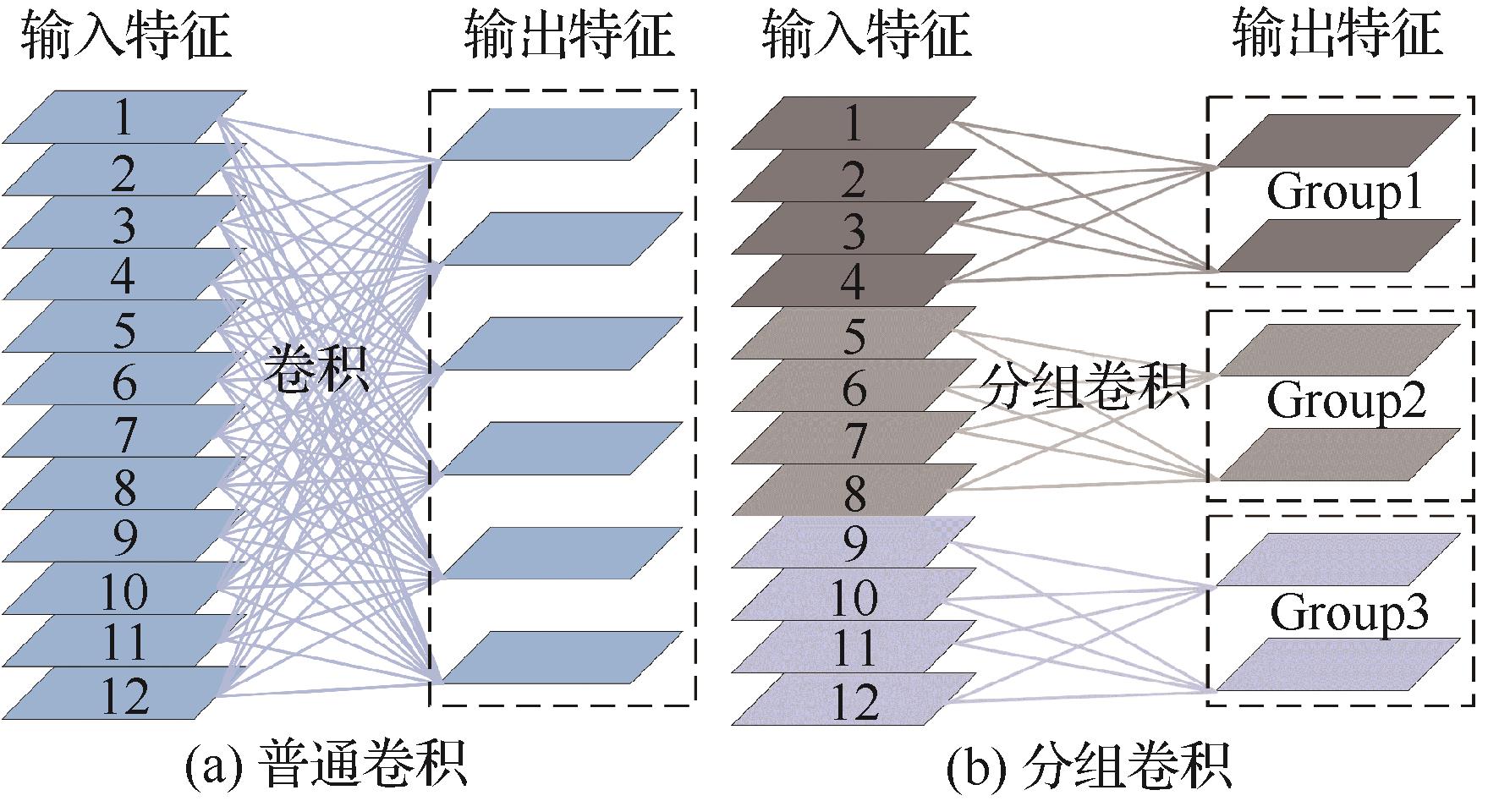

Fig. 5
Convolutional group visualization
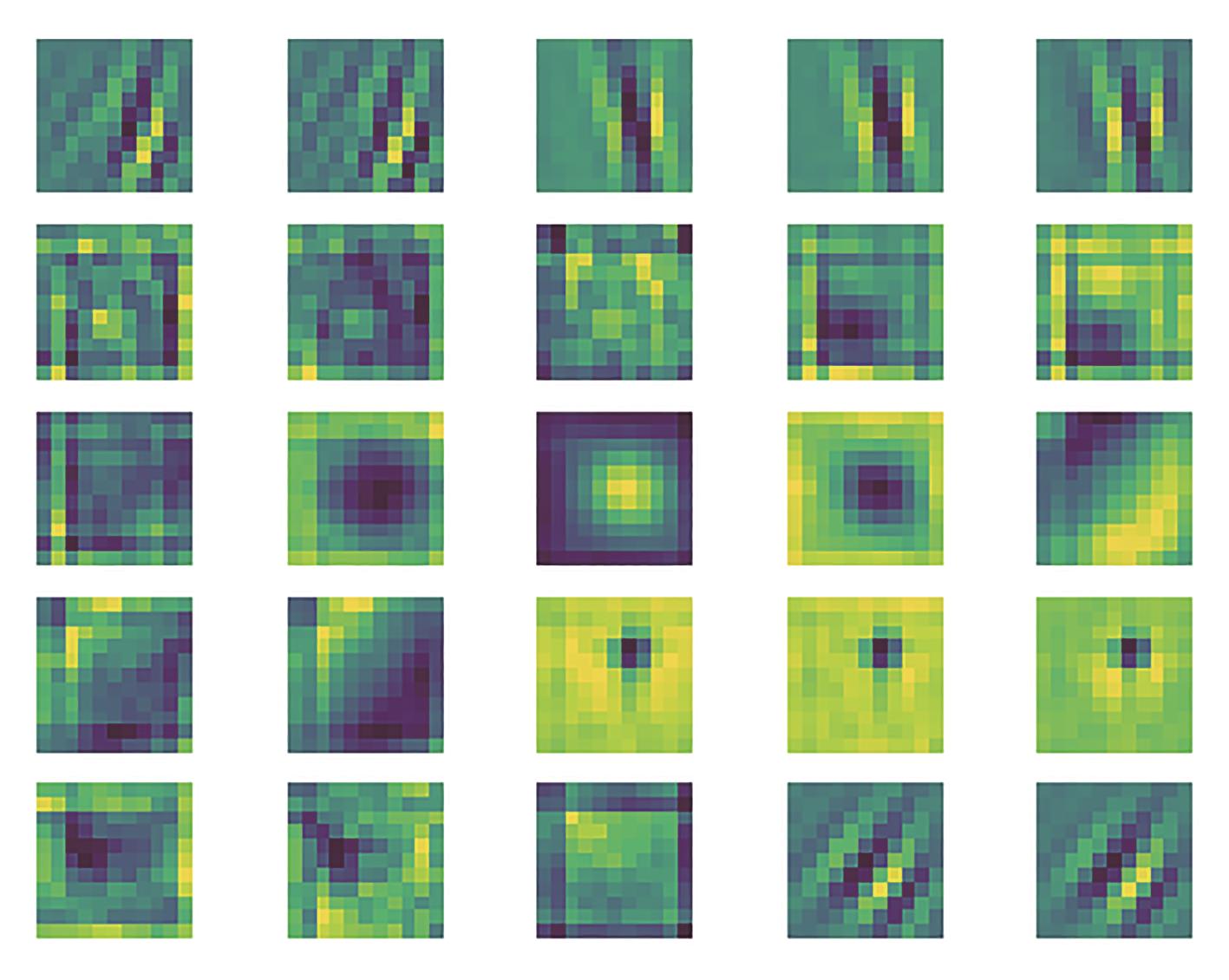

Fig. 6
Multi-scale attention module


Fig. 7
Attention feature fusion module


Fig. 8
AF-RPN module

Fig. 9
Positive-negative classification and bounding box regression


Fig. 10
Flowchart of algorithm
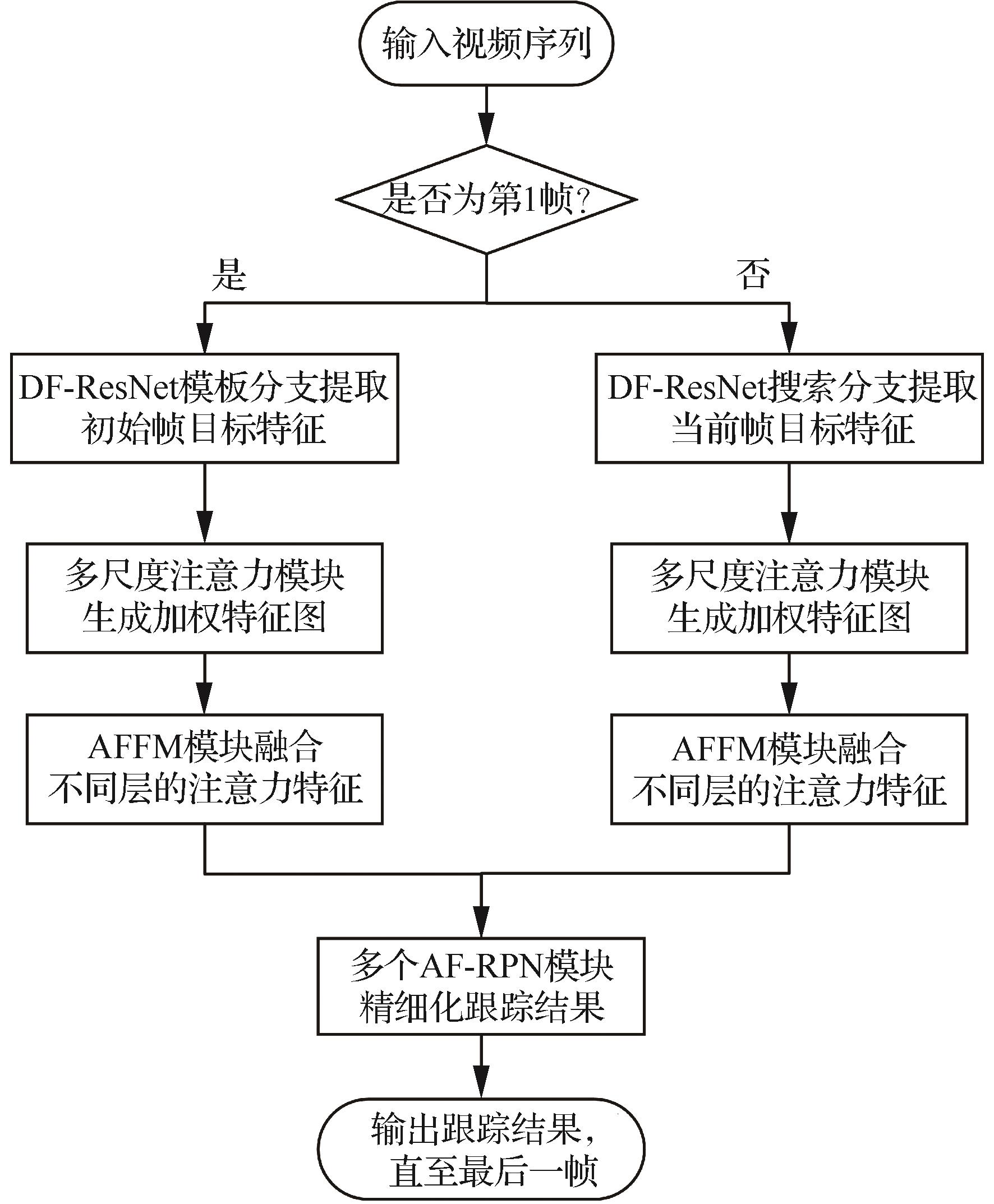
Table 1
Comparison of results of ablation experiments
| AlexNet | DF-ResNet | MS-AM | AFFM | AF-RPN | 成功率/% | 提升效果/% |
|---|---|---|---|---|---|---|
| √ | 55.7 | |||||
| √ | 58.6 | +2.9 | ||||
| √ | √ | 60.9 | +5.2 | |||
| √ | √ | 60.5 | +4.8 | |||
| √ | √ | 60.3 | +4.6 | |||
| √ | √ | √ | √ | 61.7 | +6.0 |
Table 2
Lightweight analysis
| 网络 | 参数量/M | Top-1准确率/% |
|---|---|---|
| ResNet-101 | 44.55 | 76.6 |
| ResNet-50 | 25.56 | 75.4 |
| ResNet-50+GA | 27.73 | 76.8 |
| ResNet-50+GA+LA | 29.90 | 77.7 |

Fig. 11
Class activation map

Table 3
Five representative sequences
| 视频序列 | 长度/帧 | 主要挑战 |
|---|---|---|
| car7 | 1 033 | SV,ARC,FOC,POC,VC,SOB |
| uav8 | 301 | SV,LR,BC,IV |
| car15 | 469 | SV,ARC,LR,POC,SOB |
| car18 | 1 207 | SV,ARC,FM, VC,CM |
| wakeboard6 | 1 165 | SV,ARC,LR,FM,IV,VC,CM |

Fig. 12
Tracking results of algorithms in UAV123 dataset

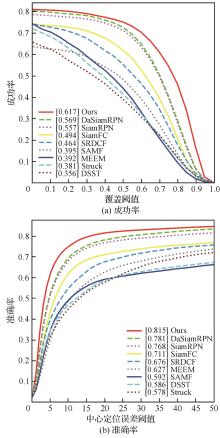
Fig. 13
Overall performance evaluation of algorithms in UAV123 dataset


Fig. 14
Evaluation results of different attributes of UAV123 with algorithms


Fig. 15
Tracking results of algorithms in UAV aerial video

| 1 | 孟琭, 杨旭. 目标跟踪算法综述[J]. 自动化学报, 2019, 45(7): 1244-1260. |
| MENG L, YANG X. A survey of object tracking algorithms[J]. Acta Automatica Sinica, 2019, 45(7): 1244-1260 (in Chinese). | |
| 2 | TAO R, GAVVES E, SMEULDERS A W M. Siamese instance search for tracking[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press,2016:1420-1429. |
| 3 | BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional Siamese networks for object tracking[M]∥Lecture Notes in Computer Science. Cham: Springer International Publishing, 2016: 850-865. |
| 4 | HE A F, LUO C, TIAN X M, et al. A twofold Siamese network for real-time object tracking[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press,2018:4834-4843. |
| 5 | LI B, YAN J J, WU W, et al. High performance visual tracking with Siamese region proposal network[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press,2018:8971-8980. |
| 6 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 7 | FAN H, LING H B. Siamese cascaded region proposal networks for real-time visual tracking[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2019:7944-7953. |
| 8 | LI B, WU W, WANG Q, et al. SiamRPN: evolution of Siamese visual tracking with very deep networks[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press,2019:4277-4286. |
| 9 | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press,2016:770-778. |
| 10 | 刘芳, 孙亚楠, 王洪娟, 等. 基于残差学习的自适应无人机目标跟踪算法[J]. 北京航空航天大学学报, 2020, 46(10): 1874-1882. |
| LIU F, SUN Y N, WANG H J, et al. Adaptive UAV target tracking algorithm based on residual learning[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1874-1882 (in Chinese). | |
| 11 | 刘贞报, 马博迪, 高红岗, 等. 基于形态自适应网络的无人机目标跟踪方法[J]. 航空学报, 2021, 42(4): 524904. |
| LIU Z B, MA B D, GAO H G, et al. Adaptive morphological network based UAV target tracking algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524904 (in Chinese). | |
| 12 | 刘芳, 杨安喆, 吴志威. 基于自适应Siamese网络的无人机目标跟踪算法[J]. 航空学报, 2020, 41(1): 323423. |
| LIU F, YANG A Z, WU Z W. Adaptive Siamese network based UAV target tracking algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 323423 (in Chinese). | |
| 13 | LAROCHELLE H, HINTON G. Learning to combine foveal glimpses with a third-order Boltzmann machine[C]∥Proceedings of the 23rd International Conference on Neural Information Processing Systems-Volume 1. New York: ACM, 2010:1243-1251. |
| 14 | WANG X L, GIRSHICK R, GUPTA A, et al. Non-local neural networks[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018:7794-7803. |
| 15 | HU J, SHEN L, ALBANIE S, et al. Squeeze-and-excitation networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(8): 2011-2023. |
| 16 | Alex K, Ilya S, E H G. ImageNet classification with deep convolutional neural networks[C]∥Proceedings of the 2012 neural information processing systems(NIPS). New York: Curran Associates Inc, 2012. |
| 17 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[DB/OL]. arXiv preprint: 1409.1556,2014. |
| 18 | XIE S N, GIRSHICK R, DOLLÁR P, et al. Aggregated residual transformations for deep neural networks[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017:5987-5995. |
| 19 | SZEGEDY C, LIU W, JIA Y Q, et al. Going deeper with convolutions[C]∥2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2015:1-9. |
| 20 | DAI Y M, GIESEKE F, OEHMCKE S, et al. Attentional feature fusion[C]∥2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2021:3559-3568. |
| 21 | YU Y C, XIONG Y L, HUANG W L, et al. Deformable Siamese attention networks for visual object tracking[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020:6727-6736. |
| 22 | 柏罗, 张宏立, 王聪. 基于高效注意力和上下文感知的目标跟踪算法[J]. 北京航空航天大学学报, 2022, 48(7): 1222-1232. |
| BAI L, ZHANG H L, WANG C. Target tracking algorithm based on efficient attention and context awareness[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1222-1232 (in Chinese). | |
| 23 | PFLUGFELDER R. An In-depth analysis of visual tracking with Siamese neural networks[DB/OL]. arXiv preprint: 1707.00569, 2018. |
| 24 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017:936-944. |
| 25 | HUANG L H, ZHAO X, HUANG K Q. GOT-10k: A large high-diversity benchmark for generic object tracking in the wild[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(5): 1562-1577. |
| 26 | CHEN Z D, ZHONG B N, LI G R, et al. Siamese box adaptive network for visual tracking[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020:6667-6676. |
| 27 | MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking[C]∥Computer Vision-ECCV 2016. Cham: Springer International Publishing, 2016:445-461. |
| 28 | RUSSAKOVSKY O, DENG J, SU H, et al. ImageNet large scale visual recognition challenge[J]. International Journal of Computer Vision, 2015, 115(3): 211-252. |
| 29 | CHATTOPADHAY A, SARKAR A, HOWLADER P, et al. Grad-CAM: generalized gradient-based visual explanations for deep convolutional networks[C]∥2018 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press,2018:839-847. |
| 30 | REAL E, SHLENS J, MAZZOCCHI S, et al. YouTube-BoundingBoxes: A large high-precision human-annotated data set for object detection in video[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017:7464-7473. |
| 31 | LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: Common objects in context[C]∥Computer Vision-ECCV 2014. Cham: Springer International Publishing, 2014:740-755. |
| 32 | DANELLJAN M, HÄGER G, SHAHBAZ KHAN F, et al. Accurate scale estimation for robust visual tracking[C]∥Proceedings of the British Machine Vision Conference 2014. British Machine Vision Association, 2014:1-11. |
| 33 | ZHANG J M, MA S G, SCLAROFF S. MEEM: Robust tracking via multiple experts using entropy minimization[M]. Computer Vision-ECCV 2014. Cham: Springer International Publishing, 2014:188-203. |
| 34 | LI Y, ZHU J K. A scale adaptive kernel correlation filter tracker with feature integration[C]∥Computer Vision-ECCV 2014 Workshops. Cham: Springer International Publishing, 2015:254-265. |
| 35 | DANELLJAN M, HÄGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking[C]∥2015 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2015:4310-4318. |
| 36 | HARE S, GOLODETZ S, SAFFARI A, et al. Struck: structured output tracking with kernels[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(10): 2096-2109. |
| 37 | ZHU Z, WANG Q, LI B, et al. Distractor-aware Siamese networks for visual object tracking[C]∥Computer Vision-ECCV 2018. Cham: Springer International Publishing, 2018:103-119. |
| 38 | WU Y, LIM J, YANG M H. Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1834-1848. |
| [1] | Chunhui ZHAO, Anmeng LIU, Yang LYU, Quan PAN. A survey of resilient self-localization for UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 28839-028839. |
| [2] | Wei ZHANG, Ruojun HE. Autonomous trajectory design for IoT data collection by UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 329054-329054-1. |
| [3] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [4] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [5] | Chao AN, Guixi HUO, Yang MENG, Changchuan XIE, Chao YANG. Aerodynamic modeling methods and influence of layout parameters for wingtip⁃hinged multi⁃body combined UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629587-629587. |
| [6] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [7] | Qingrui ZHANG, Yunyun LIU, Huijie SUN, Bo ZHU. Robust cooperative tracking control for close formation of fixed⁃wing unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629233-629233. |
| [8] | Hongzhen GUO, Mou CHEN, Yongdong DAI, Maofei WANG. Distributed adaptive event⁃triggered formation control for QUAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729917-729917. |
| [9] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [10] | Weihong ZHANG, Han ZHOU, Shaoying LI, Jihong ZHU, Lu ZHOU. Material⁃structure integrated design for high⁃performance aerospace thin⁃walled component [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 627428-627428. |
| [11] | An ZHANG, Mi YANG, Wenhao BI, Baichuan ZHANG, Yunong WANG. Task allocation of heterogeneous multi-UAVs in uncertain environment based on multi-strategy integrated GWO [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327115-327115. |
| [12] | Zhiqiang FENG, Zhijun XIE, Zhengwei BAO, Kewei CHEN. Real⁃time dense small object detection algorithm for UAV based on improved YOLOv5 [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327106-327106. |
| [13] | Bin LIU, Jing XU, Meiling HUO, Xueying CUI, Xiufeng XIE, Donghui YANG, Jia WANG. Remaining useful life prediction based on multi-scale adaptive attention network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 226918-226918. |
| [14] | Guotao MAO, Tianmin DENG, Nanjing YU. Object detection in UAV images based on multi-scale split attention [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 326738-326738. |
| [15] | Xiaohang LI, Jianjiang ZHOU. Multi⁃scale modality fusion network based on adaptive memory length [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(22): 628977-628977. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341