ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (7): 327106-327106.doi: 10.7527/S1000-6893.2022.27106
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Zhiqiang FENG1, Zhijun XIE1( ), Zhengwei BAO2, Kewei CHEN3
), Zhengwei BAO2, Kewei CHEN3
Received:2022-03-04
Revised:2022-03-22
Accepted:2022-04-28
Online:2023-04-15
Published:2022-05-11
Contact:
Zhijun XIE
E-mail:xiezhijun@nbu.edu.cn
Supported by:CLC Number:
Zhiqiang FENG, Zhijun XIE, Zhengwei BAO, Kewei CHEN. Real⁃time dense small object detection algorithm for UAV based on improved YOLOv5[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327106-327106.

Fig. 1
Improved YOLOv5s network structure diagram

Table 1
Comparison of number of parameters and calculation volume after improvement of CAM module
| 模型 | 参数量 | 计算量/G | mAP50/% |
|---|---|---|---|
| YOLOv5s | 7 037 095 | 15.926 8 | 33.04 |
| YOLOv5s+CAM | 7 099 079 | 16.067 1 | 33.21 |
| YOLOv5s+CAM- | 7 037 310 | 15.927 3 | 33.30 |
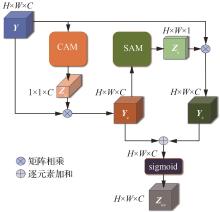
Fig. 2
spatial-channel attention module

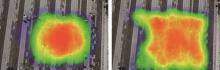
Fig. 3
Diagram of attention area distribution comparison

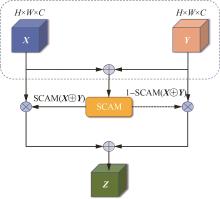
Fig. 4
Structure diagram of SC-AFF module

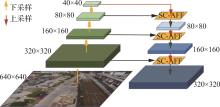
Fig. 5
FPN structure after replacing SC-AFF


Fig. 6
Attention weight calculation
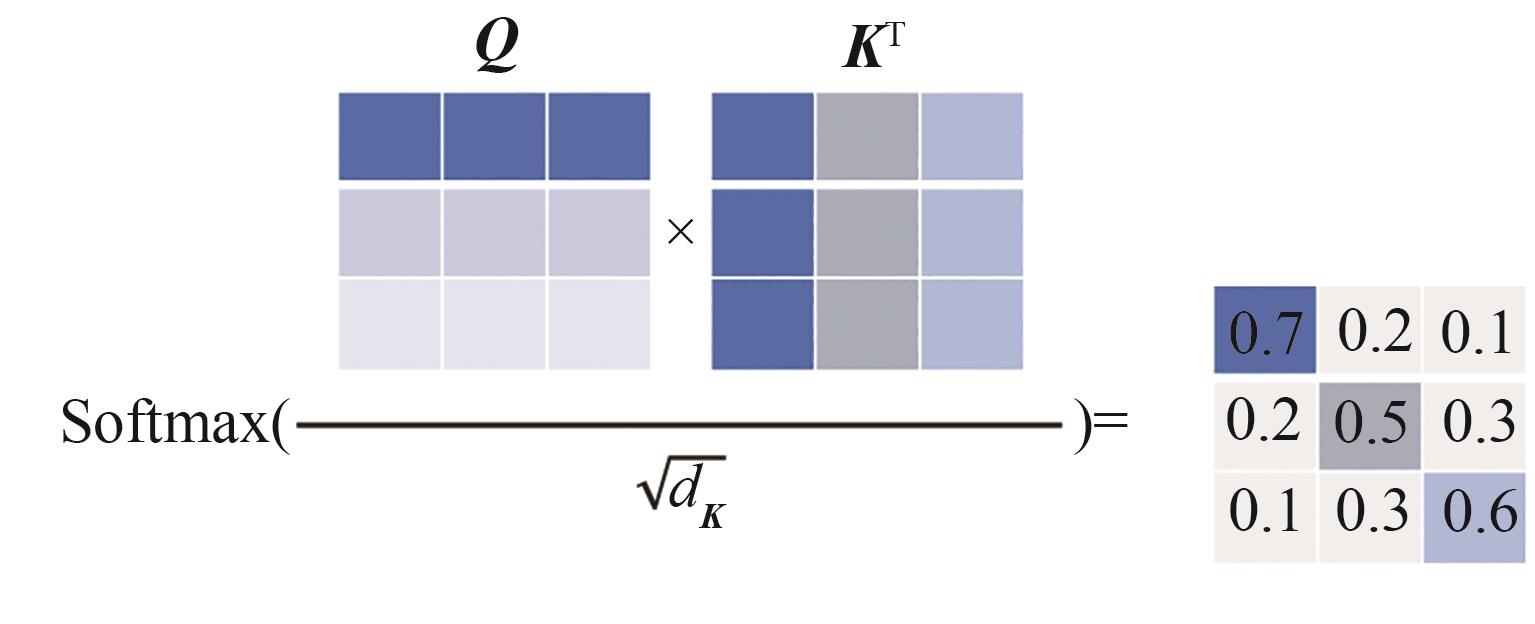

Fig. 7
Structure diagram SC-Transformer Encoder
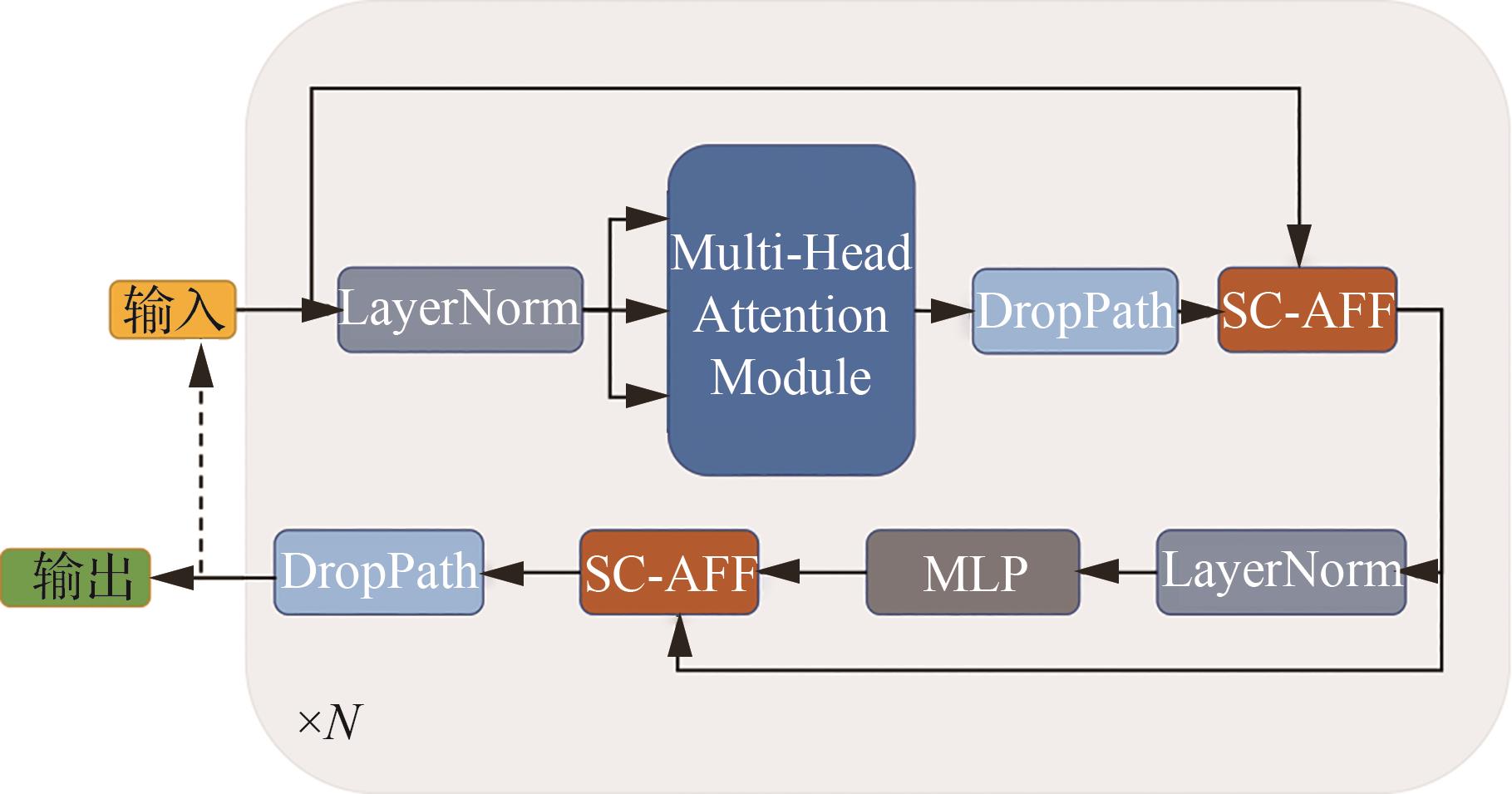

Fig. 8
Multi-head attention model calculation process
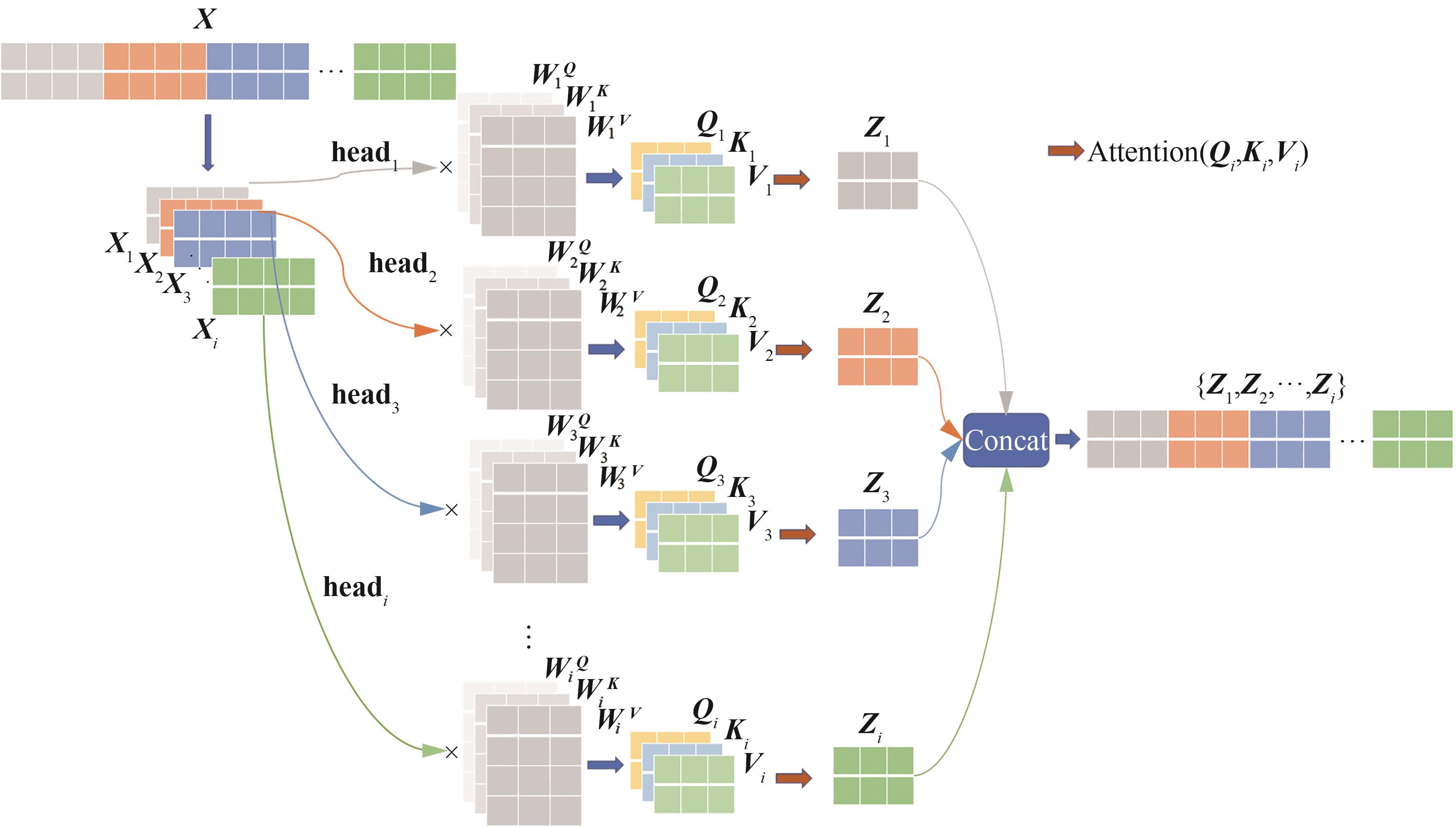

Fig. 9
Feature map serialization
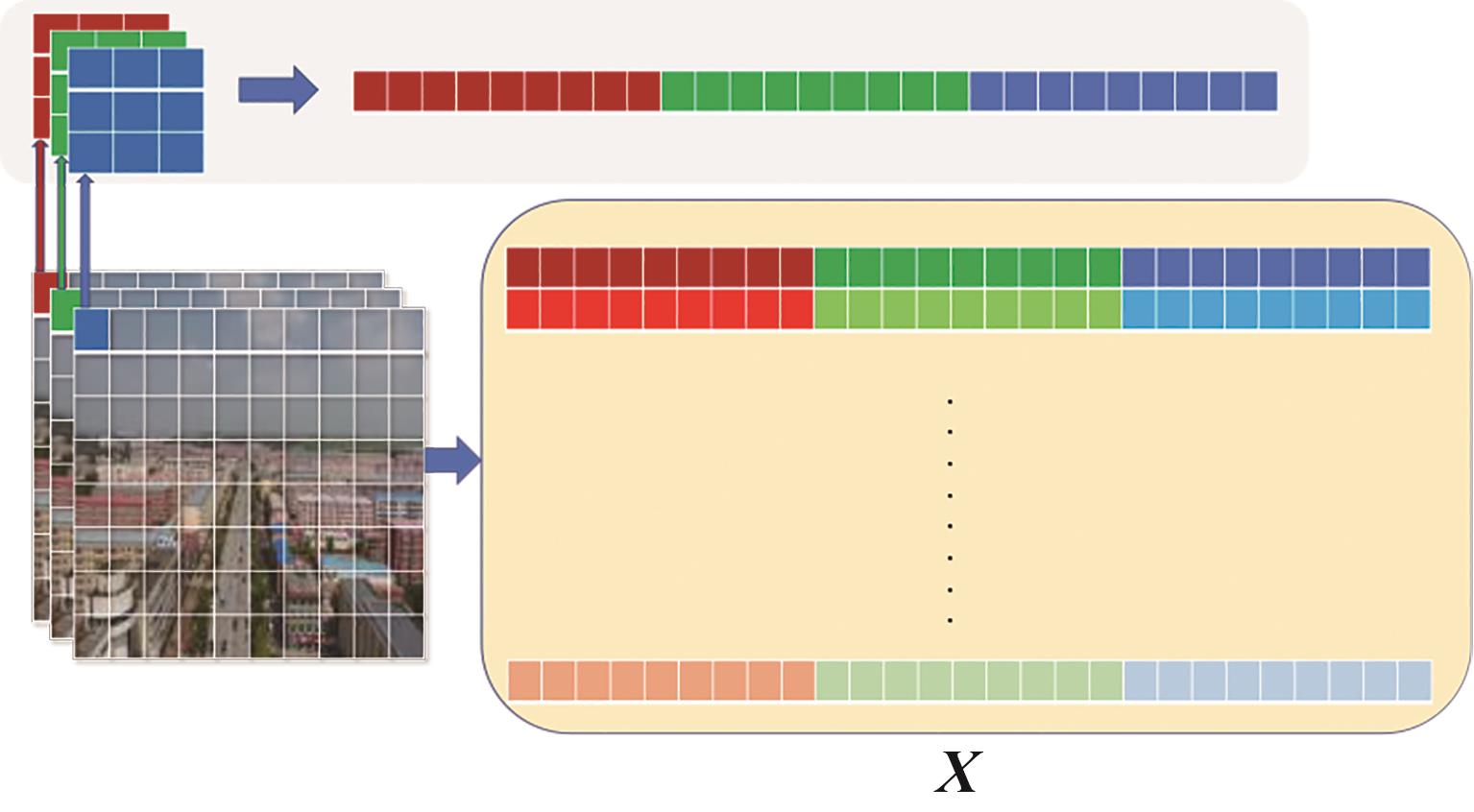
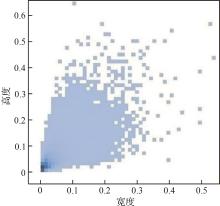
Fig. 10
Size distribution of all labels in training set
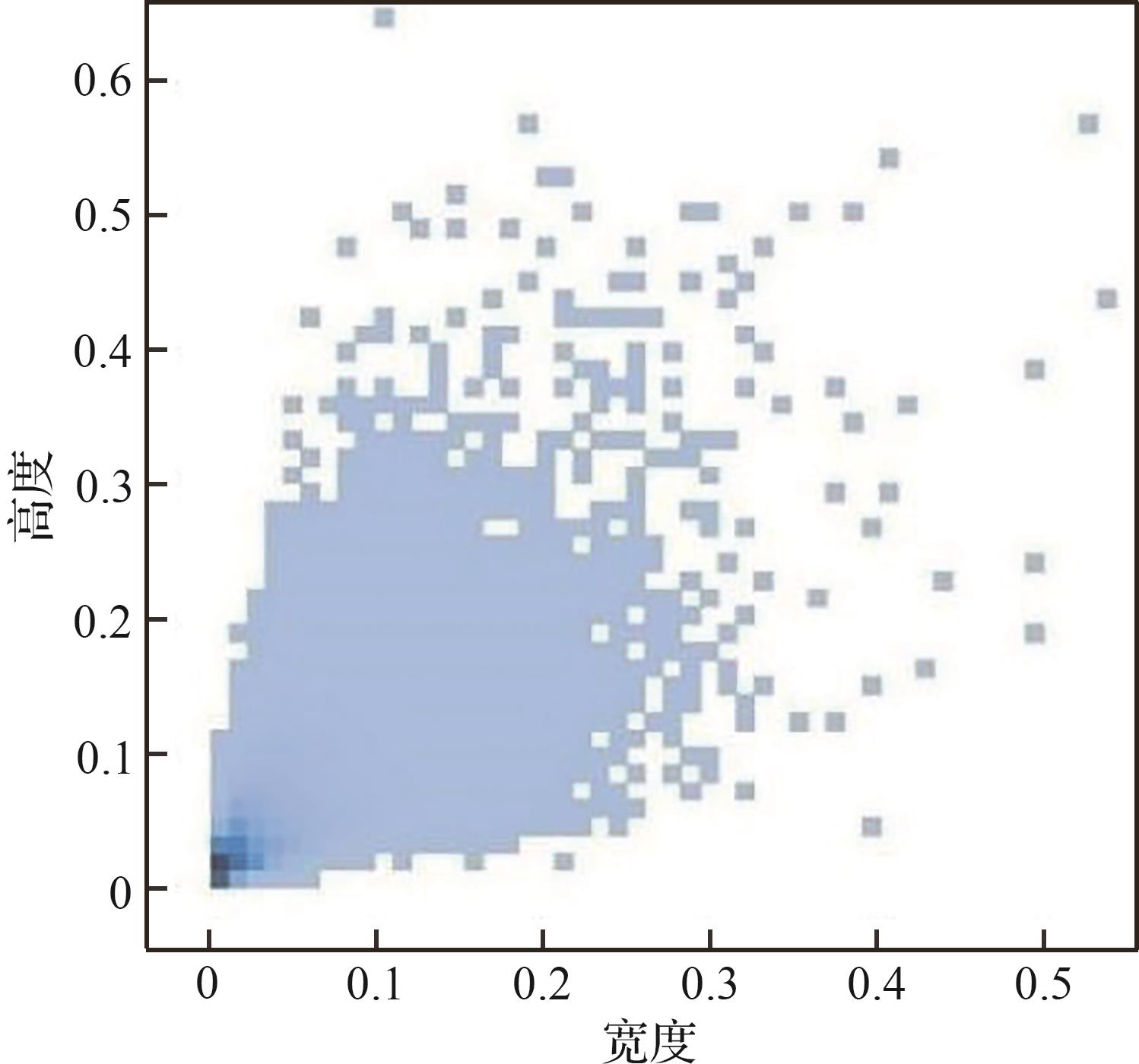
Table 2
Ablation experiment
| 模型 | 算法 | mAP50/% | mAP75/% | mAP50:95/% | Pre/% | Params/M | GFLOPs | FPS1 504 |
|---|---|---|---|---|---|---|---|---|
| A | YOLOv5s | 33.0 | 14.8 | 16.5 | 45.1 | 7.037 1 | 15.9 | 122 |
| B | YOLOv5s+CBAMneck | 33.6 | 15.2 | 16.8 | 47.3 | 7.347 0 | 16.7 | 82 |
| C | YOLOv5s+SCAMneck | 34.3 | 16.9 | 17.7 | 48.0 | 7.047 9 | 15.9 | 122 |
| D | C+SC-AFF | 37.0 | 18.7 | 19.5 | 49.1 | 7.054 4 | 16.0 | 118 |
| E | YOLOv5s+Transformer | 36.0 | 16.3 | 18.1 | 48.7 | 8.429 4 | 19.1 | 46 |
| F | YOLOv5s+SC-Transformer | 37.2 | 19.5 | 20.2 | 49.3 | 8.431 6 | 19.1 | 46 |
| G | F+SCAMbackbone&neck+SC-AFF | 39.4 | 20.6 | 21.4 | 50.9 | 8.457 5 | 19.2 | 46 |

Fig. 11
Ablation experiments of mAP50, mAP75, and mAP50:95

Table 3
Effect of different input image resolutions and network size during training
| 算法 | mAP50 | Param/M | GFLOPs | Size/MB | FPS1 504 |
|---|---|---|---|---|---|
| YOLOv5n640 | 27.9 | 1.777 | 4.2 | 14.8 | 384 |
| YOLOv5n1 024 | 39.3 | 1.777 | 10.8 | 15.0 | 384 |
| YOLOv5n1 504 | 46.7 | 1.777 | 23.3 | 15.3 | 384 |
| YOLOv5s640 | 33.0 | 7.037 | 15.9 | 57.0 | 122 |
| YOLOv5s1 024 | 47.2 | 7.037 | 40.8 | 57.1 | 122 |
| YOLOv5s1 504 | 51.9 | 7.037 | 88.0 | 57.5 | 122 |
| Proposed-s640 | 39.4 | 8.438 | 19.2 | 68.2 | 46 |
| Proposed-s1 024 | 48.6 | 8.438 | 51.2 | 69.2 | 46 |
| Proposed-s1 504 | 54.5 | 8.438 | 109.7 | 71.0 | 46 |
| Proposed-m640 | 40.3 | 25.480 | 58.3 | 201.9 | 31 |
| Proposed-m1 024 | 50.5 | 25.480 | 149.2 | 202.9 | 31 |
| Proposed-m1 504 | 55.6 | 25.480 | 321.8 | 204.7 | 31 |

Fig. 12
Variation of FPS and mAP50 of Proposed-s model at different detection image resolutions
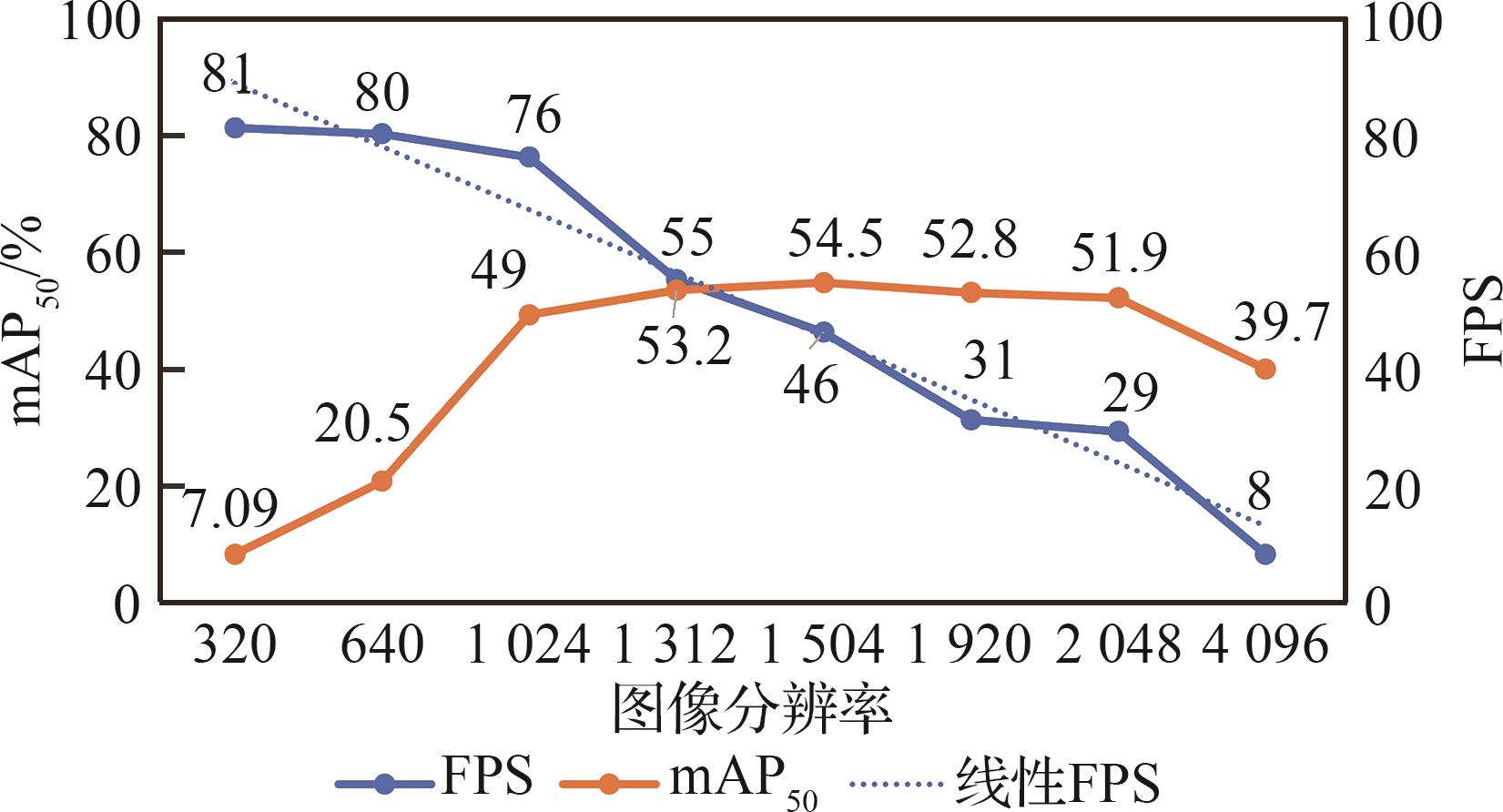
Table 4
Comparison experiments of different object detection algorithms
| 算法 | mAP50/% | mAP75/% | mAP50:95/% | FPS1 504 |
|---|---|---|---|---|
| RetinaNet[ | 28.7 | 11.6 | 11.8 | |
| RetfineDet[ | 28.8 | 14.1 | 14.9 | |
| Cascade-RCNN[ | 31.9 | 15.6 | 16.1 | |
| FPN | 32.2 | 14.9 | 16.5 | |
| Light-RCNN[ | 32.8 | 15.1 | 16.5 | |
| Faster-RCNN | 33.2 | 15.2 | 17.0 | 15 |
| CornerNet[ | 34.1 | 15.9 | 17.4 | 33 |
| YOLOv3 | 41.7 | 22.9 | 24.5 | 31 |
| YOLOv3-SPP | 41.9 | 23.1 | 25.4 | 32 |
| YOLOv4 | 43.0 | 25.2 | 24.9 | 35 |
| YOLOv5-v6.0 | 44.7 | 26.8 | 26.4 | 35 |
| 本文算法 | 54.5 | 33.1 | 32.0 | 46 |

Fig. 13
Diagram of detection effect under different difficult conditions
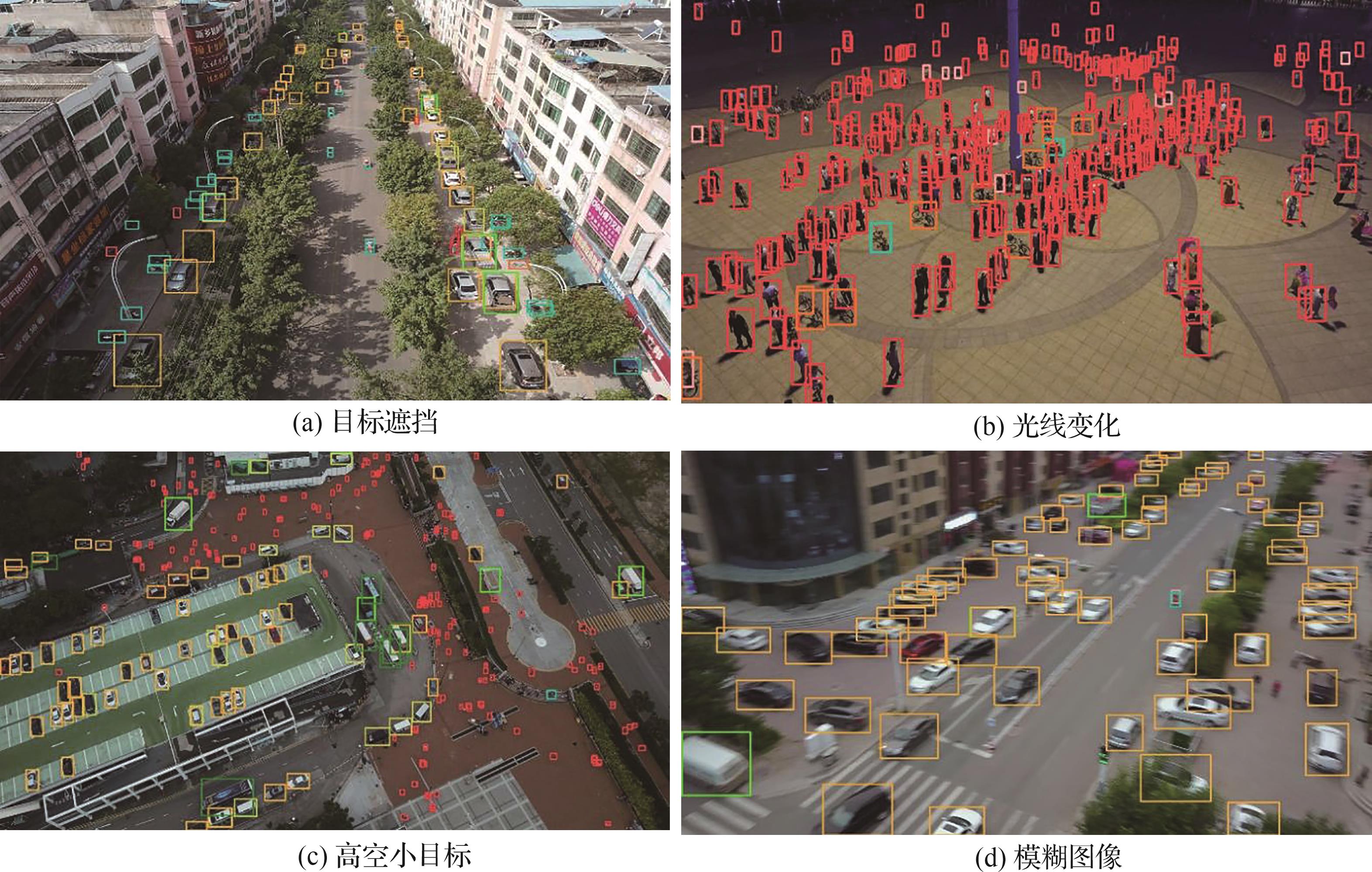

Fig. 14
Comparison of object detection results

| 1 | 江波, 屈若锟, 李彦冬, 等. 基于深度学习的无人机航拍目标检测研究综述[J]. 航空学报, 2021, 42(4): 524519. |
| JIANG B, QU R K, LI Y D, et al. Object detection in UAV imagery based on deep learning: Review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524519 (in Chinese). | |
| 2 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 3 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 779-788. |
| 4 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single shot MultiBox detector[C]∥European Conference on Computer Vision (ECCV). Amsterdam: Springer, 2016: 21-37. |
| 5 | REDMON J, FARHADI A. YOLO9000: Better, faster, stronger[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 6517-6525. |
| 6 | REDMON J, FARHADI A. YOLOv3: An incremental improvement[DB/OL]. arXiv preprint: 1804.02767, 2018. |
| 7 | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal speed and accuracy of object detection[DB/OL]. arXiv preprint: 2004.10934, 2020. |
| 8 | 李科岑, 王晓强, 林浩, 等. 深度学习中的单阶段小目标检测方法综述[J]. 计算机科学与探索, 2022, 16(1): 41-58. |
| LI K C, WANG X Q, LIN H, et al. Survey of one-stage small object detection methods in deep learning[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(1): 41-58 (in Chinese). | |
| 9 | WANG Q C, ZHANG H, HONG X G, et al. Small object detection based on modified FSSD and model compression[J]. 2021 IEEE 6th International Conference on Signal and Image Processing (ICSIP), 2021: 88-92. |
| 10 | GONG Y Q, YU X H, DING Y, et al. Effective fusion factor in FPN for tiny object detection[C]∥2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2021: 1159-1167. |
| 11 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 936-944. |
| 12 | 刘芳, 韩笑. 基于多尺度深度学习的自适应航拍目标检测[J]. 航空学报, 2022, 43(5): 325270. |
| LIU F, HAN X. Adaptive aerial object detection based on multi-scale deep learning[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(5): 325270 (in Chinese). | |
| 13 | WOO S, PARK J, LEE J Y, et al. CBAM: Convolutional block attention module[C]∥Computer Vision – ECCV 2018, 2018. |
| 14 | WANG Q L, WU B G, ZHU P F, et al. ECA-net: Efficient channel attention for deep convolutional neural networks[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 11531-11539. |
| 15 | LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 8759-8768. |
| 16 | DAI Y M, GIESEKE F, OEHMCKE S, et al. Attentional feature fusion[C]∥2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2021: 3559-3568. |
| 17 | ZHU L L, GENG X, LI Z, et al. Improving YOLOv5 with attention mechanism for detecting boulders from planetary images[J]. Remote Sensing, 2021, 13(18): 3776. |
| 18 | ZHU X K, LYU S C, WANG X, et al. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios[C]∥2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). Piscataway: IEEE Press, 2021: 2778-2788. |
| 19 | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16×16 words: Transformers for image recognition at scale[C]∥ International Conference on Learning Representations (ICLR), 2021. |
| 20 | PAN X R, GE C J, LU R, et al. On the integration of self-attention and convolution[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 805-815. |
| 21 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all You need[DB/OL]. arXiv preprint: 1706.03762, 2017. |
| 22 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]∥2017 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2017: 2999-3007. |
| 23 | ZHANG S F, WEN L Y, BIAN X, et al. Single-shot refinement neural network for object detection[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 4203-4212. |
| 24 | CAI Z W, VASCONCELOS N. Cascade R-CNN: Delving into high quality object detection[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 6154-6162. |
| 25 | LI Z M, PENG C, YU G, et al. Light-head R-CNN: In defense of two-stage object detector[DB/OL]. arXiv preprint: 1711. 07264, 2017. |
| 26 | LAW H, DENG J. CornerNet: Detecting objects as paired keypoints[J]. International Journal of Computer Vision, 2020, 128(3): 642-656. |
| 27 | HE K M, ZHANG X Y, REN S Q, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. |
| [1] | Haifeng WANG, Kunpeng LIU, Hongxin JIANG, Chenxi DU. Aerodynamic optimization method of propeller multi⁃design points and variable pitch angle strategy [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 528831-528831. |
| [2] | Jing ZHAO, Dan SONG. Integrity monitoring method for GNSS/IMU integrated navigation system of UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328943-328943. |
| [3] | Chuanyun WANG, Yang SU, Linlin WANG, Tian WANG, Jingjing WANG, Qian GAO. Multi-object continuous robust tracking algorithm for anti-UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017-329017. |
| [4] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [5] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [6] | Chuihuan KONG, Dawei WU, Zhaoguang TAN, Lijun PAN, Rubing MA, Jiangtao SI. Design of fully electric scheme for three⁃surface verification aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629618-629618. |
| [7] | Guangjia LI, Hongbo WANG, Kai ZHANG, Zhisheng YI. Lift enhancement and drag reduction technologies of solar powered unmanned aerial vehicles in near space: Review [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529644-529644. |
| [8] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [9] | Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816. |
| [10] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [11] | Jiqiang GAN, Xiaoping WANG. Surface defect detection of fiber placement based on virtual sample generation [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 428624-428624. |
| [12] | Hongzhen GUO, Mou CHEN, Yongdong DAI, Maofei WANG. Distributed adaptive event⁃triggered formation control for QUAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729917-729917. |
| [13] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| [14] | Wenkang HAO, Suyan BAO, Qifeng CHEN. Distributed control of UAVs formation based on port⁃Hamiltonian system [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729868-729868. |
| [15] | Yuqi CAO, Haoran FU, Fei GAO, Ximin LYU. Trajectory tracking control algorithm for canard⁃equipped tail⁃sitting vertical takeoff and landing UAV based on MPCC [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729950-729950. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 823
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 2637
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341