ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (8): 327115-327115.doi: 10.7527/S1000-6893.2022.27115
• Electronics and Electrical Engineering and Control • Previous Articles
An ZHANG, Mi YANG( ), Wenhao BI, Baichuan ZHANG, Yunong WANG
), Wenhao BI, Baichuan ZHANG, Yunong WANG
Received:2022-03-07
Revised:2022-03-29
Accepted:2022-04-28
Online:2022-05-11
Published:2022-05-09
Contact:
Mi YANG
E-mail:yangmi@mail.nwpu.edu.cn
Supported by:CLC Number:
An ZHANG, Mi YANG, Wenhao BI, Baichuan ZHANG, Yunong WANG. Task allocation of heterogeneous multi-UAVs in uncertain environment based on multi-strategy integrated GWO[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327115-327115.
Table 1
Task sequence coding example
| 任务 | T1 | T2 | T3 | |||
|---|---|---|---|---|---|---|
| T1,1 | T1,2 | T2,1 | T2,2 | T3,1 | T3,2 | |
| X | 2.6 | 3.4 | 1.9 | 3.6 | 1.1 | 2.4 |
| [X] | 2 | 3 | 1 | 3 | 1 | 2 |
| {X} | 0.6 | 0.4 | 0.9 | 0.6 | 0.1 | 0.4 |
| UAV | U2 | U3 | U1 | U3 | U1 | U2 |
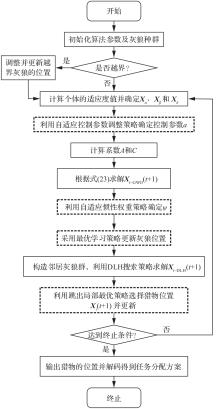
Fig. 1
Flow chart of IMSGWO algorithm

Table 2
Basic information of UAVs
| 编号 | 类型 | 价值 | 打击概率 | 位置/m | 巡航速度/(m·s-1) |
|---|---|---|---|---|---|
| U1 | 侦察 | 69 | 0 | (463,694) | (33,44,55) |
| U2 | 察打 | 112 | 0.97 | (743,628) | (33,45,56) |
| U3 | 察打 | 191 | 0.93 | (979,1 336) | (29,39,48) |
| U4 | 打击 | 71 | 0.95 | (730,1 153) | (31,42,52) |
Table 3
Basic information of tasks
| 编号 | 类型 | 价值 | 打击概率 | 位置/m | 消失时刻/s | 执行时长/s |
|---|---|---|---|---|---|---|
| T1,1 | 察 | 65 | 0.5 | (5 279,8 697) | (1 850,1 975,2 100) | (69,92,115) |
| T1,2 | 打 | (218,291,363) | ||||
| T2,1 | 察 | 84 | 0.5 | (6 196,8 474) | (1 921,2 046,2 171) | (71,95,118) |
| T2,2 | 打 | (222,297,371) | ||||
| T3,1 | 察 | 98 | 0.5 | (6 577,5 004) | (1 437,1 562,1 687) | (78,105,131) |
| T3,2 | 打 | (212,283,353) | ||||
| T4,1 | 察 | 94 | 0.2 | (9 985,8 664) | (1 484,1 609,1 734) | (78,105,131) |
| T4,2 | 打 | (211,282,352) | ||||
| T5,1 | 察 | 83 | 0.3 | (7 570,8 423) | (2 733,2 858,2 983) | (72,97,121) |
| T5,2 | 打 | (211,282,352) | ||||
| T6,1 | 察 | 50 | 0.4 | (7 312,6 062) | (1 771,1 896,2 021) | (71,95,118) |
| T6,2 | 打 | (218,291,363) | ||||
| T7,1 | 察 | 95 | 0.6 | (6 090,5 853) | (2 500,2 625,2 750) | (69,92,115) |
| T7,2 | 打 | (216,289,361) | ||||
| T8,1 | 察 | 52 | 0.6 | (5 825,8 552) | (1 585,1 710,1 835) | (76,102,127) |
| T8,2 | 打 | (213,285,356) | ||||
| T9,1 | 察 | 62 | 0.5 | (8 110,7 115) | (2 685,2 810,2 935) | (75,100,125) |
| T9,2 | 打 | (221,295,368) | ||||
| T10,1 | 察 | 97 | 0.5 | (7 951,5 736) | (2 187,2 312,2 437) | (67,90,112) |
| T10,2 | 打 | (224,299,373) |

Fig. 2
Fitness curve of IMSGWO

Table 4
Schedules information of UAVs
| 无人机编号 | 任务序列 | 任务列表完成时间/s | 行驶距离/m |
|---|---|---|---|
| U1 | T9,1→T5,1→T8,1→T2,1 | (470,606,783) | 13 531 |
| U2 | T10,1→T1,1→T7,1→T4,1→T8,2→T4,2 | (1 006,1 299,1 677) | 28 592 |
| U3 | T6,1→T10,2→T3,1→T6,2→T5,2→T7,2 | (1 424,1 871,2 373) | 16 115 |
| U4 | T3,2→T1,2→T2,2→T9,2 | (1 232,1 614,2 054) | 14 206 |
Table 5
Allocation information of tasks
| 任务编号 | 执行无人机 | 开始时刻/s | 时序约束可信度 | 时间窗约束可信度 |
|---|---|---|---|---|
| T1,1 | U2 | (295,374,492) | 1 | 1 |
| T1,2 | U4 | (787,1 026,1 313) | ||
| T2,1 | U1 | (470,606,783) | 1 | 1 |
| T2,2 | U4 | (964,1 261,1 608) | ||
| T3,1 | U3 | (478,621,796) | 0.948 | 0.969 |
| T3,2 | U4 | (878,1 153,1 464) | ||
| T4,1 | U2 | (565,724,943) | 0.937 | 0.808 |
| T4,2 | U2 | (1 006,1 299,1 677) | ||
| T5,1 | U1 | (282,359,470) | 1 | 1 |
| T5,2 | U3 | (1 158,1 521,1 930) | ||
| T6,1 | U3 | (380,493,633) | 1 | 1 |
| T6,2 | U3 | (767,1 007,1 279) | ||
| T7,1 | U2 | (422,539,704) | 1 | 1 |
| T7,2 | U3 | (1 424,1 871,2 373) | ||
| T8,1 | U1 | (386,495,644) | 0.929 | 1 |
| T8,2 | U2 | (718,921,1 197) | ||
| T9,1 | U1 | (181,226,302) | 1 | 1 |
| T9,2 | U4 | (1 232,1 614,2 054) | ||
| T10,1 | U2 | (157,196,261) | 1 | 1 |
| T10,2 | U3 | (878,1 152,1 463) |
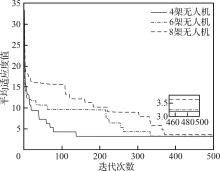
Fig. 3
Average fitness curves of IMSGWO with increasing number of UAVs
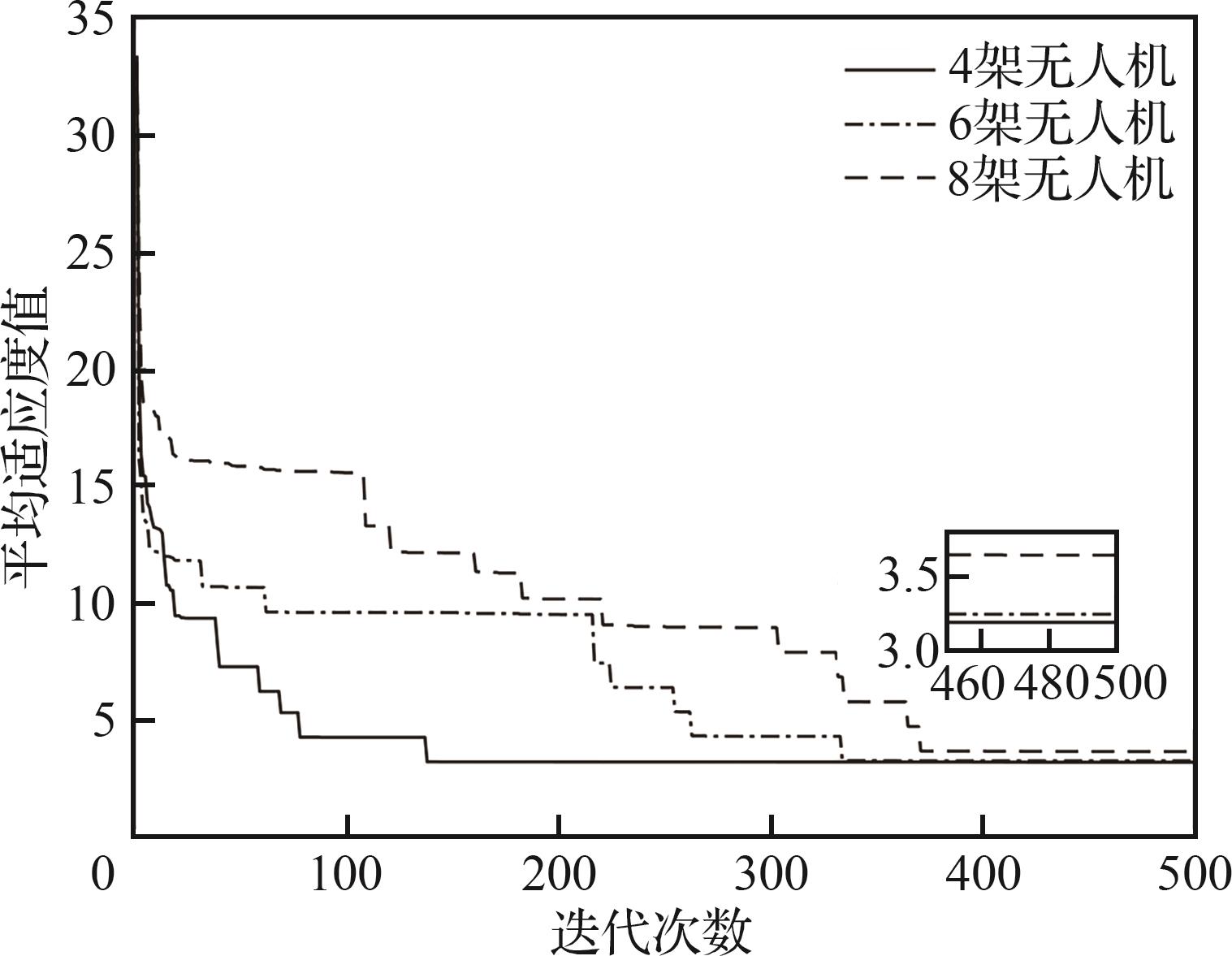

Fig. 4
Average fitness curves of IMSGWO with increasing number of targets

Table 6
Comparison of performance of five algorithms with three different settings
| 算法 | M=6,N=8 | M=4,N=10 | M=4,N=12 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PSO | GWO | IGWO | MOPSO | IMSGWO | PSO | GWO | IGWO | MOPSO | IMSGWO | PSO | GWO | IGWO | MOPSO | IMSGWO | ||||
| BST | 2.59 | 2.638 9 | 2.597 6 | 2.689 3 | 2.564 8 | 3.156 7 | 3.169 7 | 3.167 9 | 3.191 8 | 3.096 7 | 3.732 3 | 3.756 2 | 3.733 4 | 3.731 5 | 3.013 | |||
| AVG | 6.575 8 | 2.689 | 2.669 5 | 2.821 1 | 2.624 2 | 7.084 7 | 3.190 7 | 3.182 5 | 3.458 2 | 3.146 5 | 23.368 | 7.941 1 | 4.528 5 | 8.712 8 | 3.654 6 | |||
| WST | 22.312 | 2.738 | 2.711 3 | 2.959 9 | 2.657 7 | 22.750 | 3.208 1 | 3.194 3 | 4.366 6 | 3.185 3 | 33.327 | 13.624 | 7.946 1 | 33.741 | 3.741 1 | |||
| STD | 8.293 4 | 0.035 8 | 0.030 7 | 0.093 8 | 0.024 5 | 8.246 3 | 0.011 8 | 0.091 1 | 0.372 3 | 0.026 7 | 8.050 9 | 4.525 2 | 1.513 1 | 12.745 3 | 0.225 7 | |||
| AVGIter | 225.5 | 55.5 | 21.2 | 22 | 32.7 | 223.4 | 42.5 | 24.2 | 31 | 35.5 | 362.7 | 439.5 | 173 | 261 | 230.9 | |||
| AVGDis/m | 13 946 | 14 514 | 14 464 | 14 795 | 14 290 | 18 984 | 18 273 | 18 291 | 19 422 | 18 422 | 22 640 | 23 343 | 23 146 | 25 427 | 22 243 | |||
| AVGComTime/s | 778 | 815 | 802 | 801 | 797 | 1 318 | 1 244 | 1 312 | 1 326 | 1 274 | 1 515 | 1 586 | 1 539 | 1 565 | 1 518 | |||
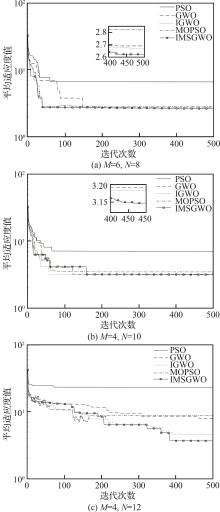
Fig. 5
Average fitness curves of five algorithms with three different settings
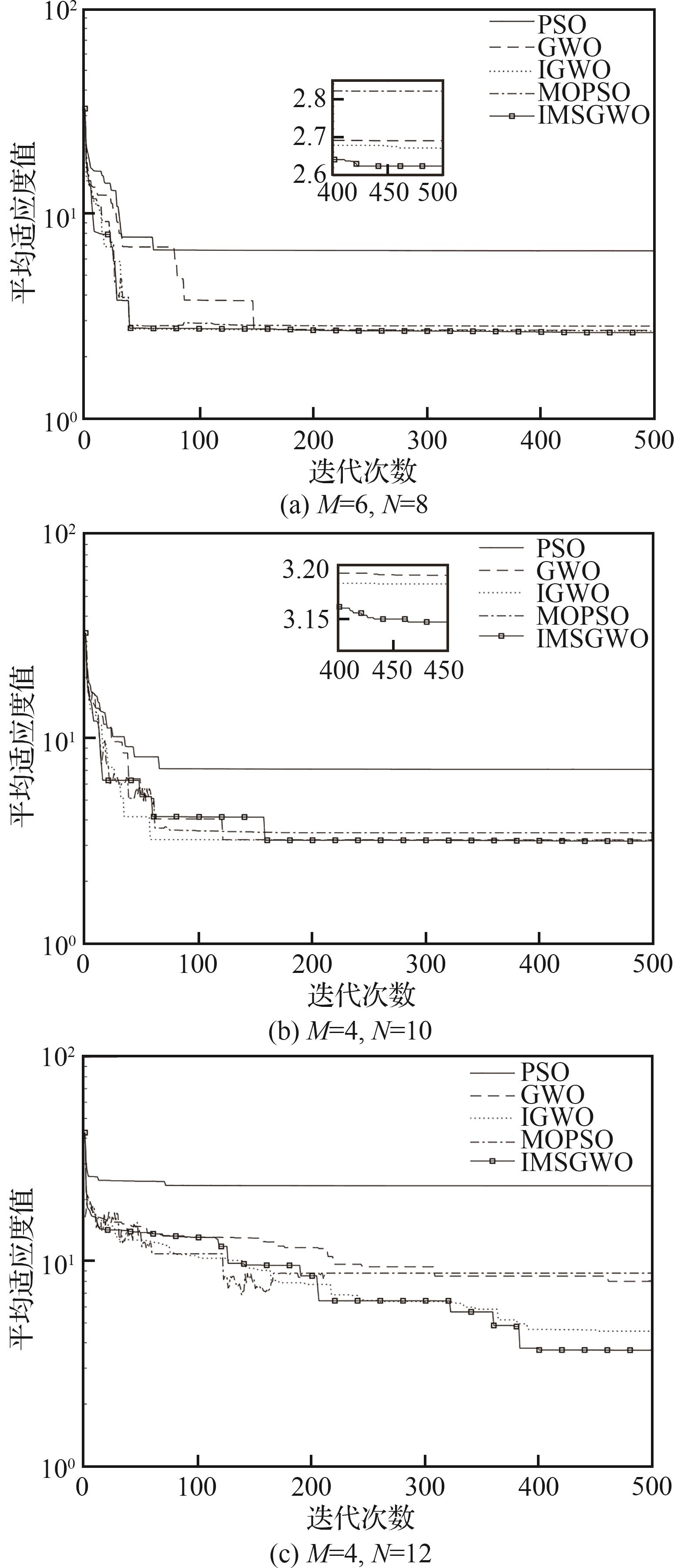

Fig. 6
Average task completion time and average fitness with increasing preference value cr and three different settings
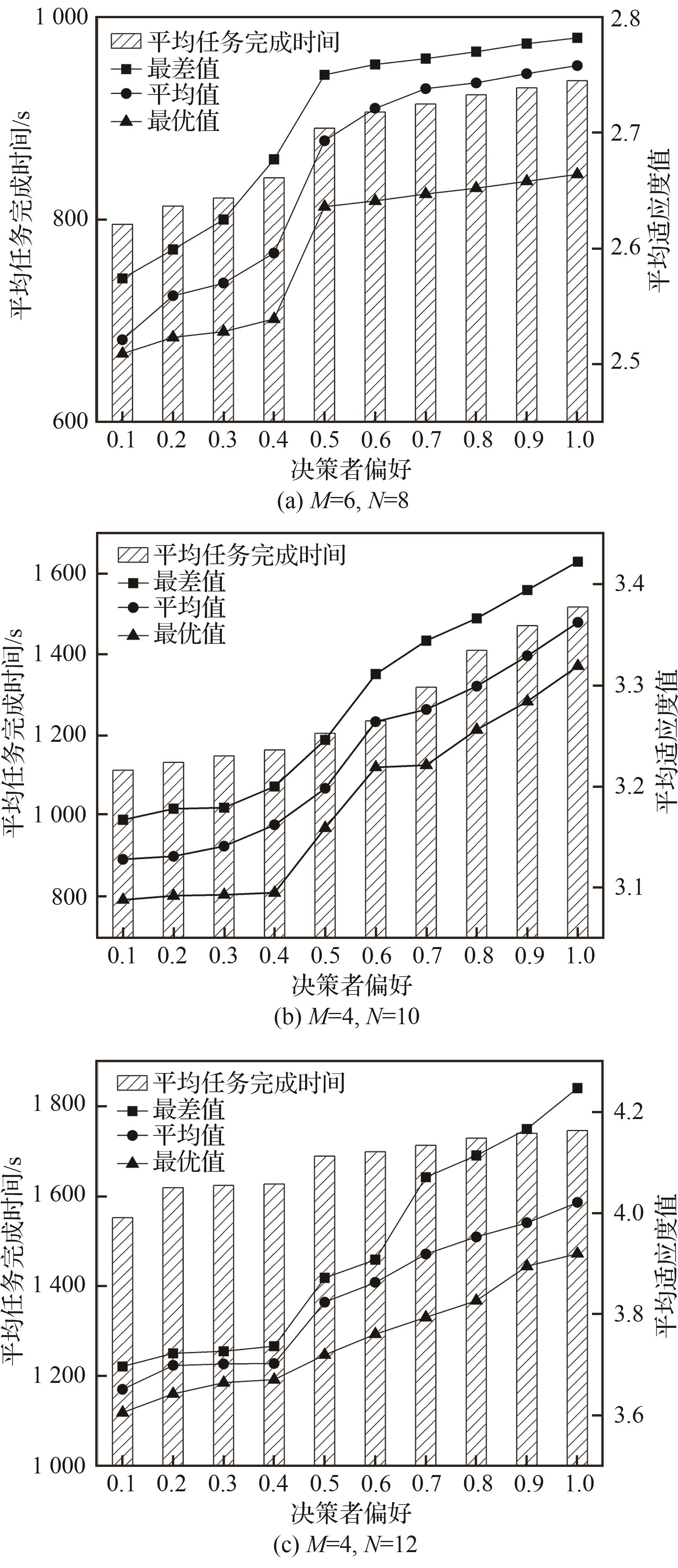

Fig. 7
Average task completion time and average fitness with increasing uncertain degree χ and average three different settings
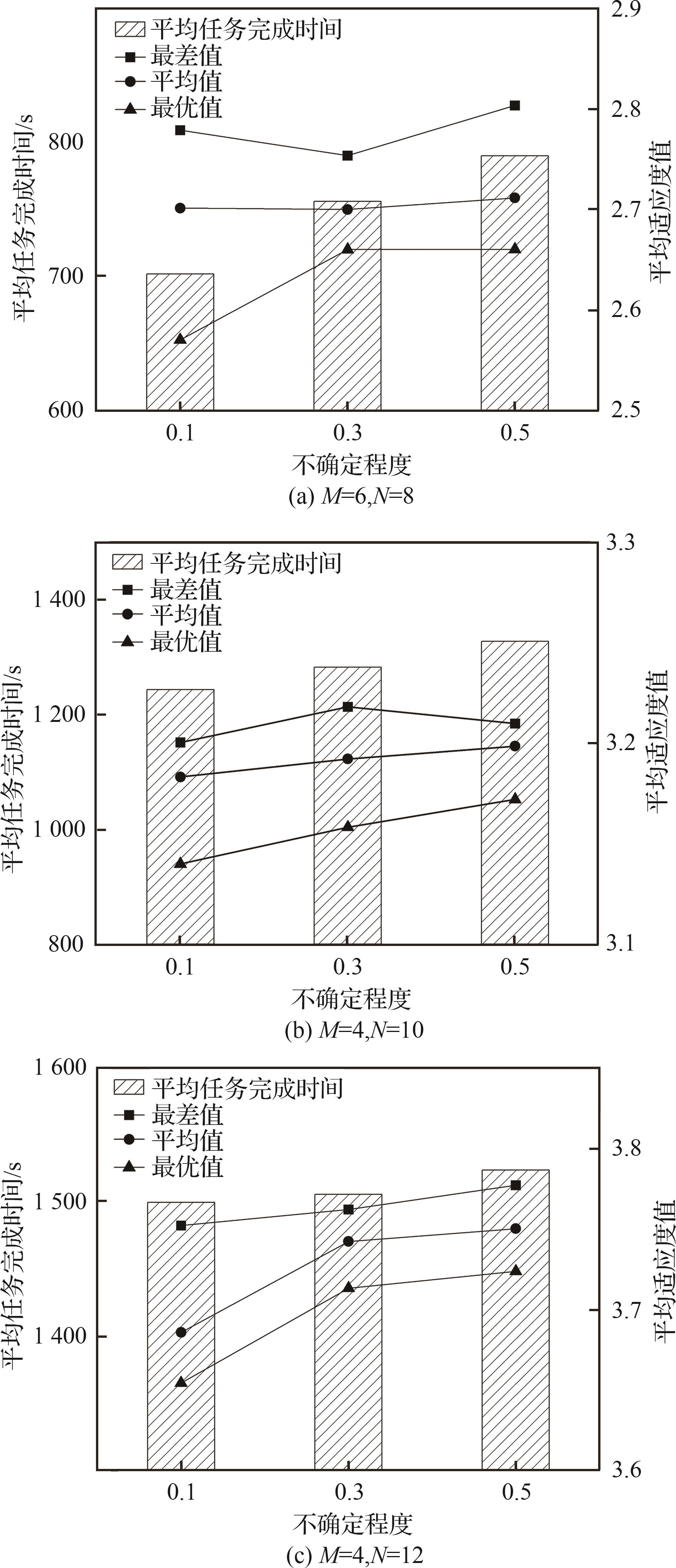
Table 7
Dynamic performance of IMSGWO with different settings and preference value
| 任务载荷设置 | 决策者偏好cr | RePer/% | ReSucPer/% |
|---|---|---|---|
| M=6,N=8 | 0.2 | 86 | 83.72 |
| 0.5 | 72.25 | 92.5 | |
| 0.8 | 67.28 | 95.83 | |
| M=4,N=10 | 0.2 | 96 | 79.41 |
| 0.5 | 82 | 86.46 | |
| 0.8 | 75.37 | 91.38 | |
| M=4,N=12 | 0.2 | 100 | 74.5 |
| 0.5 | 94. 5 | 76.31 | |
| 0.8 | 87.21 | 86.96 |
Table 8
Dynamic performance of IMSGWO with different settings and uncertain degrees
| 任务载荷设置 | 不确定程度χ | RePer/% | ReSucPer/% |
|---|---|---|---|
| M=6,N=8 | 0.2 | 63.25 | 76.77 |
| 0.5 | 74.25 | 98.81 | |
| 0.8 | 89.5 | 100 | |
| M=4,N=10 | 0.2 | 85.25 | 74.75 |
| 0.5 | 86.5 | 93.2 | |
| 0.8 | 99.25 | 95.09 | |
| M=4,N=12 | 0.2 | 100 | 72.25 |
| 0.5 | 100 | 92.5 | |
| 0.8 | 100 | 94.5 |
| 1 | 杜永浩, 邢立宁, 蔡昭权. 无人飞行器集群智能调度技术综述[J]. 自动化学报, 2020, 46(2): 222-241. |
| DU Y H, XING L N, CAI Z Q. Survey on intelligent scheduling technologies for unmanned flying craft clusters[J]. Acta Automatica Sinica, 2020, 46(2): 222-241 (in Chinese). | |
| 2 | 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35(3): 593-606. |
| SHEN L C, CHEN J, WANG N. Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 593-606 (in Chinese). | |
| 3 | 陈璞, 严飞, 刘钊, 等. 通信约束下异构多无人机任务分配方法[J]. 航空学报, 2021, 42(8): 525844. |
| CHEN P, YAN F, LIU Z, et al. Communication-constrained task allocation of heterogeneous UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525844 (in Chinese). | |
| 4 | 陈志旺, 夏顺, 李建雄, 等. 考虑分配次序的无人机协同目标分配建模与遗传算法求解[J]. 控制理论与应用, 2019, 36(7): 1072-1082. |
| CHEN Z W, XIA S, LI J X, et al. Modeling of unmanned aerial vehicles cooperative target assignment with allocation order and its solving of genetic algorithm[J]. Control Theory & Applications, 2019, 36(7): 1072-1082 (in Chinese). | |
| 5 | 张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495. |
| ZHANG Y F, LIN D F, ZHENG D, et al. Task allocation and trajectory optimization of UAV for multi-target time-space synchronization cooperative attack[J]. Acta Armamentarii, 2021, 42(7): 1482-1495 (in Chinese). | |
| 6 | 郭继峰, 郑红星, 贾涛, 等. 异构无人系统协同作战关键技术综述[J]. 宇航学报, 2020, 41(6): 686-696. |
| GUO J F, ZHENG H X, JIA T, et al. Summary of key technologies for heterogeneous unmanned system cooperative operations[J]. Journal of Astronautics, 2020, 41(6): 686-696 (in Chinese). | |
| 7 | CHEN Y, YUAN Z H, CHEN B Z. Process optimization with consideration of uncertainties—An overview[J]. Chinese Journal of Chemical Engineering, 2018, 26(8): 1700-1706. |
| 8 | 吴蔚楠, 崔乃刚, 郭继峰. 基于目标信息估计的分布式局部协调任务分配方法[J]. 控制理论与应用, 2018, 35(4): 566-576. |
| WU W N, CUI N G, GUO J F. Distributed task assignment method based on local information consensus and target estimation[J]. Control Theory & Applications, 2018, 35(4): 566-576 (in Chinese). | |
| 9 | KAN X Y, THAYER T C, CARPIN S, et al. Task planning on stochastic aisle graphs for precision agriculture[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3287-3294. |
| 10 | JIA Z Y. Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm[J]. Aerospace Science and Technology, 2018, 76: 112-125. |
| 11 | CHEN Y B, YANG D, YU J Q. Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6): 2853-2872. |
| 12 | 何勇, 张成义, 李姗姗. 基于两阶段鲁棒优化的无人机载机平台调度问题[J]. 系统工程学报, 2020, 35(6): 838-848, 864. |
| HE Y, ZHANG C Y, LI S S. Unmanned aerial vehicle carriers scheduling problem based on two-stage robust optimization[J]. Journal of Systems Engineering, 2020, 35(6): 838-848, 864 (in Chinese). | |
| 13 | 赵玉亮, 宋业新, 赵金超, 等. 基于鲁棒优化的多无人机协同侦察任务规划[J]. 海军工程大学学报, 2021, 33(1): 48-54. |
| ZHAO Y L, SONG Y X, ZHAO J C, et al. Multi-UAV cooperative reconnaissance mission planning based on robust optimization[J]. Journal of Naval University of Engineering, 2021, 33(1): 48-54 (in Chinese). | |
| 14 | WHITBROOK A, MENG Q G, CHUNG P W H. Addressing robustness in time-critical, distributed, task allocation algorithms[J]. Applied Intelligence, 2019, 49(1): 1-15. |
| 15 | 李成严, 曹克翰, 冯世祥, 等. 不确定执行时间的云计算资源调度[J]. 哈尔滨理工大学学报, 2019, 24(1): 85-91. |
| LI C Y, CAO K H, FENG S X, et al. Resource scheduling with uncertain execution time in cloud computing[J]. Journal of Harbin University of Science and Technology, 2019, 24(1): 85-91 (in Chinese). | |
| 16 | 范厚明, 吴嘉鑫, 耿静, 等. 模糊需求与时间窗的车辆路径问题及混合遗传算法求解[J]. 系统管理学报, 2020, 29(1): 107-118. |
| FAN H M, WU J X, GENG J, et al. Hybrid genetic algorithm for solving fuzzy demand and time windows vehicle routing problem[J]. Journal of Systems & Management, 2020, 29(1): 107-118 (in Chinese). | |
| 17 | KIM J, KIM T, PARK M, et al. Fuzzy-based resource reallocation scheduling model in cloud computing[C]∥ Frontier and Innovation in Future Computing and Communications, 2014: 43-48. |
| 18 | 赵玉亮, 宋业新, 张建军, 等. 基于多策略融合粒子群的无人机对地攻击模糊博弈决策[J]. 控制理论与应用, 2019, 36(10): 1644-1652. |
| ZHAO Y L, SONG Y X, ZHANG J J, et al. Fuzzy game decision-making of unmanned aerial vehicles air-to-ground attack based on the particle swarm optimization integrating multiply strategies[J]. Control Theory & Applications, 2019, 36(10): 1644-1652 (in Chinese). | |
| 19 | MIRJALILI S. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. |
| 20 | NADIMI-SHAHRAKI M H. An improved grey wolf optimizer for solving engineering problems[J]. Expert Systems With Applications, 2021, 166: 113917. |
| 21 | 范厚明, 刘浩, 刘鹏程, 等. 集货需求模糊的异型车同时配集货路径优化[J]. 控制理论与应用, 2021, 38(5): 661-675. |
| FAN H M, LIU H, LIU P C, et al. Heterogeneous fleet vehicle routing problem with simultaneous deterministic delivery and fuzzy pickup[J]. Control Theory & Applications, 2021, 38(5): 661-675 (in Chinese). | |
| 22 | WHITBROOK A, MENG Q G, CHUNG P W H. Reliable, distributed scheduling and rescheduling for time-critical, multiagent systems[J]. IEEE Transactions on Automation Science and Engineering, 2018, 15(2): 732-747. |
| [1] | CHEN Pu, YAN Fei, LIU Zhao, CHENG Guoda. Communication-constrained task allocation of heterogeneous UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(8): 525844-525844. |
| [2] | NI Yuan, YANG Hao, JIANG Bin. Fault tolerant game control of swarm confrontation with decision faults [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524978-524978. |
| [3] | LUO Zong, DU Chun, CHEN Hao, PENG Shuang, LI Jun. Multi-satellite scheduling approach for emergency scenarios based on hierarchical forecasting with Transformer network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524721-524721. |
| [4] | TIAN Bailing, LI Pinpin, LU Hanchen, ZONG Qun. Trajectory and attitude coordinated control of multiple unmanned aerial vehicles (UAVs) in complex environments [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724245-724245. |
| [5] | WANG Ranran, WEI Wenling, YANG Mingchao, LIU Wei. Task allocation of multiple UAVs considering cooperative route planning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724234-724234. |
| [6] | RAN Huaming, XIONG Rongling. Hierarchical optimization algorithm for air fleet formation in air-combat [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724257-724257. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341