Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (3): 631880.doi: 10.7527/S1000-6893.2025.31880
• Target State Collaboration and Intelligent Perception • Previous Articles
Lei ZHANG1,2, Can TIAN2, Fangqing WEN2( ), Qinghe ZHANG2, Han LIU2
), Qinghe ZHANG2, Han LIU2
Received:2025-02-20
Revised:2025-04-14
Accepted:2025-05-06
Online:2025-05-14
Published:2025-05-13
Contact:
Fangqing WEN
E-mail:wenfangqing@ctgu.edu.cn
Supported by:CLC Number:
Lei ZHANG, Can TIAN, Fangqing WEN, Qinghe ZHANG, Han LIU. Multi-objective evolution with deep deterministic strategy gradient algorithm for mobile edge networks[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(3): 631880.

Fig.1
UAV-assisted MEC system
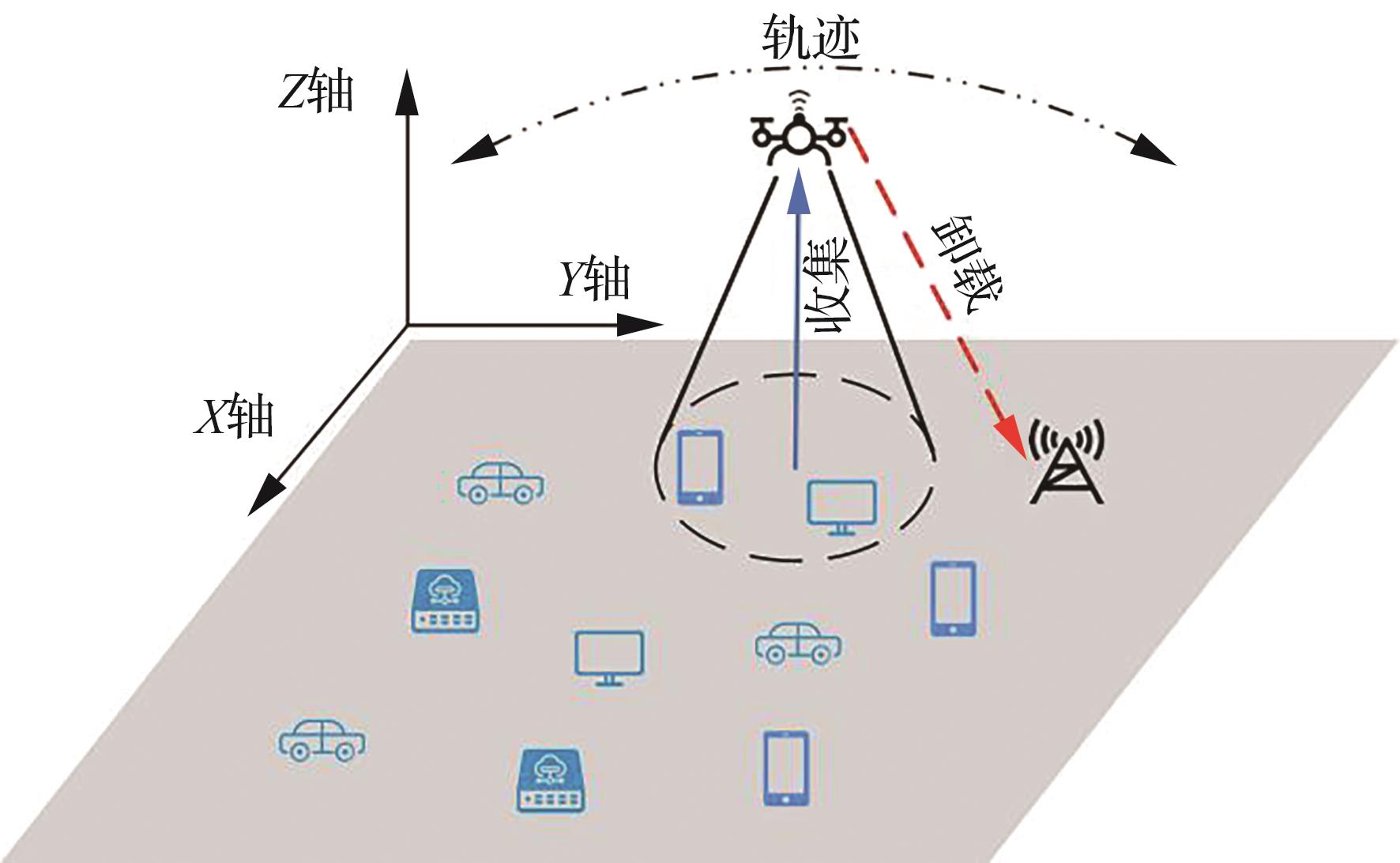
Fig.2
MOE-DDPG algorithm framework
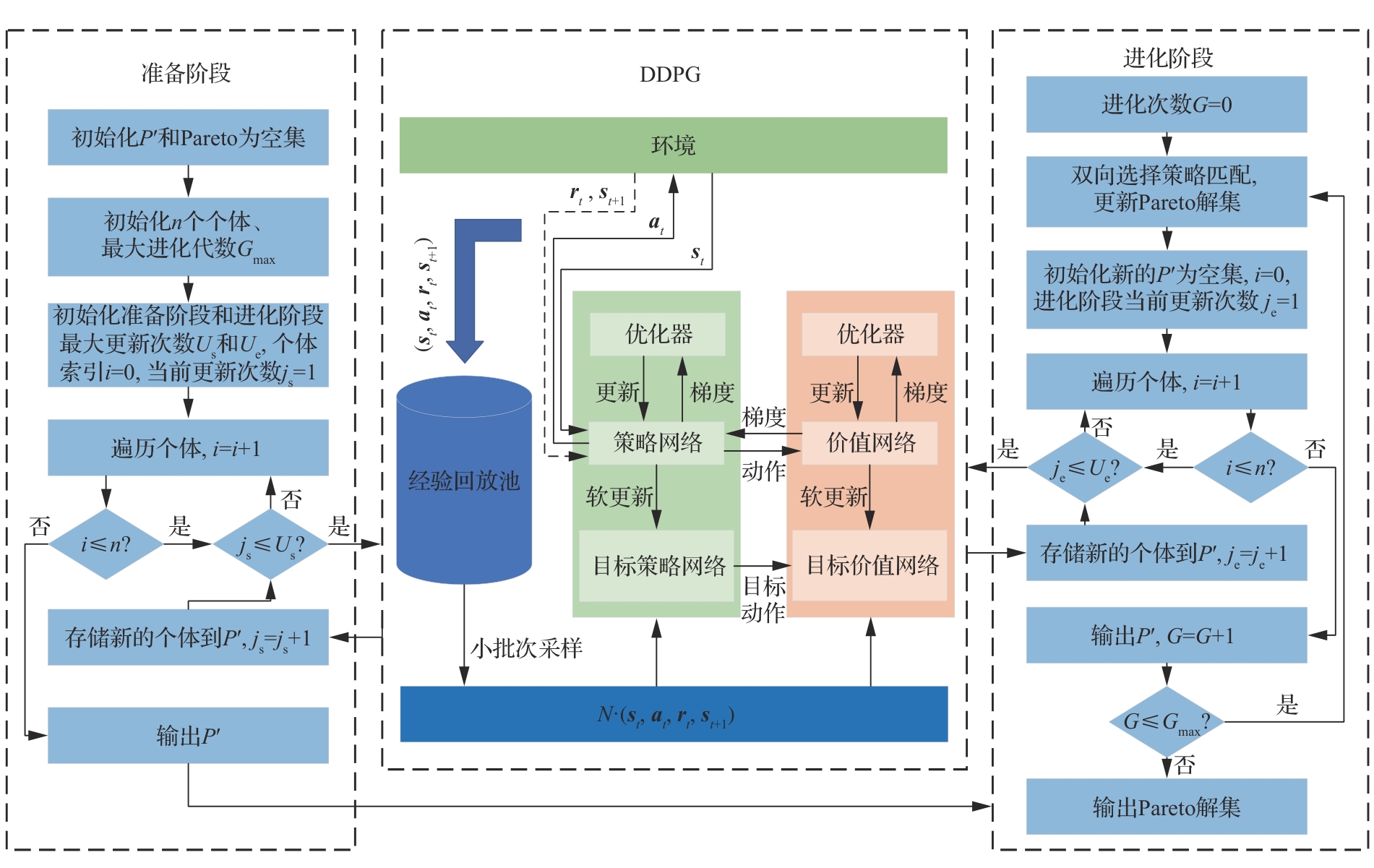
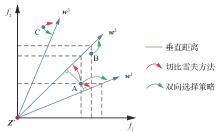
Fig.3
Matching between individuals and weight vectors under different methods
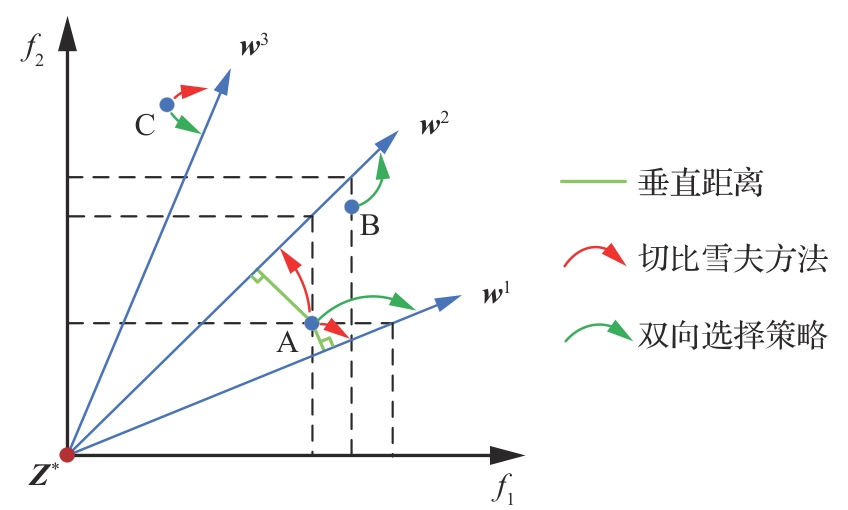
Table 1
Experimental parameters
| 参数 | 符号 | 数值 |
|---|---|---|
| UAV任务队列容量 | 10 | |
| 最大方位角/(°) | π/4 | |
| 旋翼叶片剖面功率/W | 79.86 | |
| 旋翼叶片尖端速度/(m·s-1) | 120 | |
| 诱导功率/W | 88.63 | |
| 平均诱导速度/(m·s-1) | 4.03 | |
| 机身阻力系数 | 0.6 | |
| 空气密度/(kg·m-3) | 1.225 | |
| 旋翼固有比 | 0.05 | |
| 旋翼面积/m2 | 0.503 | |
| 信道带宽/MHz | 10 | |
| UAV发射功率/W | 1 | |
| UAV与BS之间的信道噪声功率/(10-6 W) | 1 | |
| IoTTs发射功率/W | 1 | |
| UAV计算能力/GHz | 1 | |
| 有效电容系数/10-26 | 1 | |
| 折扣因子 | 0.995 | |
| 软更新比例 | 0.005 | |
| 正常数 | 2 000 | |
| 准备阶段最大更新次数 | 60 | |
| 进化阶段最大更新次数 | 10 | |
| 最大进化代数 | 100 |

Fig.4
Pareto solution set of MOE-DDPG algorithm with fused and unfused bidirectional selection strategy
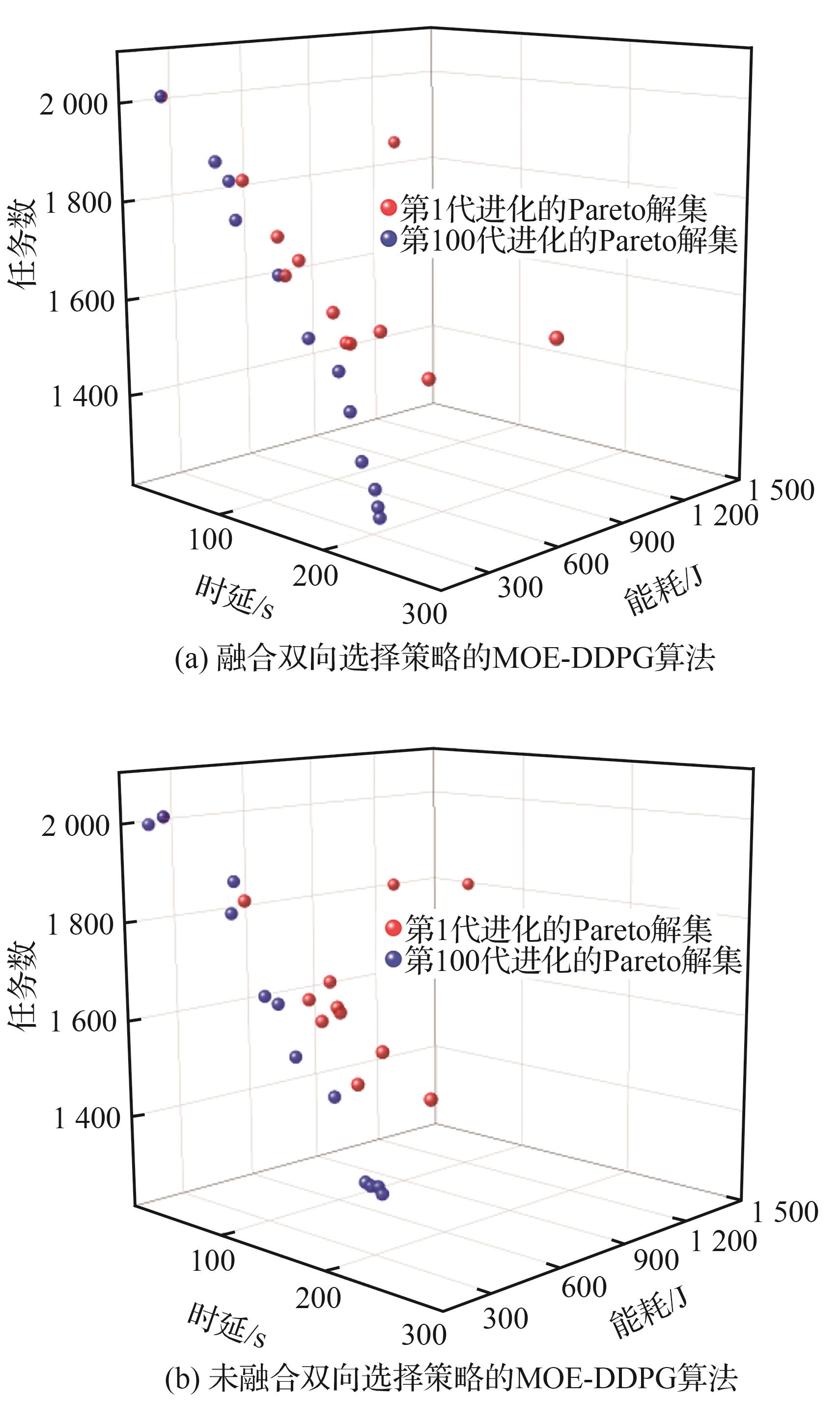
Fig.5
UAV trajectories with different weight vectors
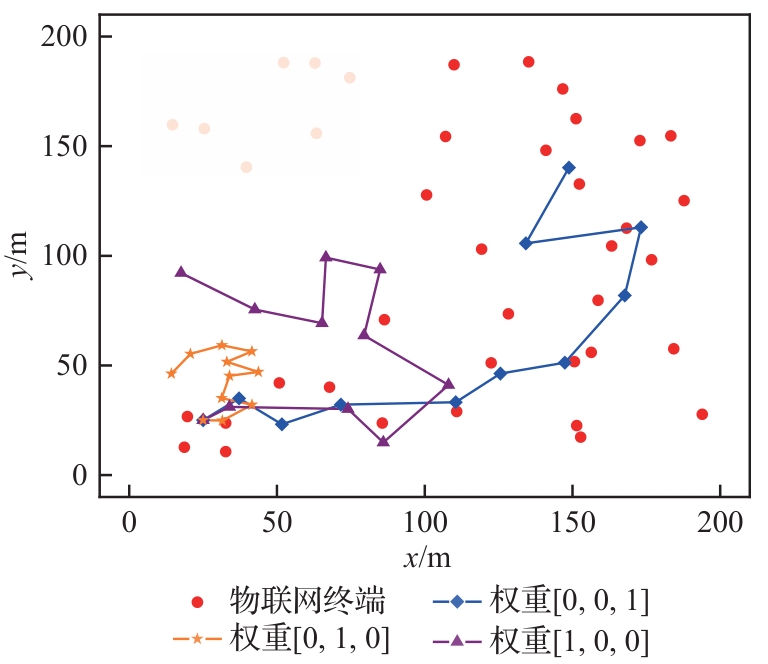
Table 2
Optimization results of different algorithms
| 算法 | ACOI | ATD | AEC | ANTC |
|---|---|---|---|---|
| MOE-DDPG | 592.242 1(+8.5%) | 102.614 2(+12.6%) | 324.237 1(+10.3%) | 348.666 7(+22.5%) |
| MOE-PPO | 646.971 1 | 117.368 7 | 351.751 8(+2.7%) | 284.733 3 |
| MOE-SAC | 617.546 4(+4.5%) | 112.478 0(+4.2%) | 351.142 9(+2.8%) | 328.666 7(+15.4%) |
| MOE-TD3 | 608.619 5(+5.9%) | 91.111 9(+22.4%) | 361.424 3 | 327.533 3(+15.0%) |
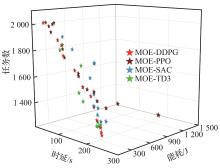
Fig.6
Pareto solution set of different algorithms in three-dimensional target space
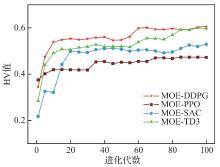
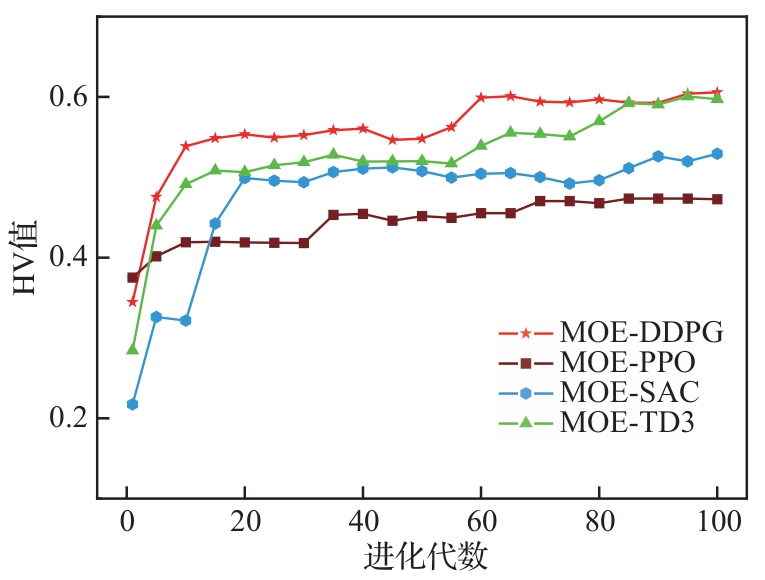
Fig.7
HV values of different algorithms
| [1] | CAO B Q, YE H F, LIU J X, et al. SMART: Cost-aware service migration path selection based on deep reinforcement learning[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(9): 12421-12436. |
| [2] | CHENG S Y, REN T, ZHANG H, et al. A Stackelberg-game-based framework for edge pricing and resource allocation in mobile edge computing[J]. IEEE Internet of Things Journal, 2024, 11(11): 20514-20530. |
| [3] | 李伟, 郭艳, 李宁, 等. 智能反射面辅助无人机移动边缘计算任务数据最大化方法[J]. 航空学报, 2023, 44(19): 328486. |
| LI W, GUO Y, LI N, et al. Intelligent reflector surface assisted UAV mobile edge computing task data maximization method[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 328486 (in Chinese). | |
| [4] | SHAH Z, JAVED U, NAEEM M, et al. Mobile edge computing (MEC)-enabled UAV placement and computation efficiency maximization in disaster scenario[J]. IEEE Transactions on Vehicular Technology, 2023, 72(10): 13406-13416. |
| [5] | ZHAI J H, BI J, YUAN H T, et al. Cost-minimized microservice migration with autoencoder-assisted evolution in hybrid cloud and edge computing systems[J]. IEEE Internet of Things Journal, 2024, 11(24): 40951-40967. |
| [6] | 李伟, 郭艳, 何明, 等. 满意度驱动下无人机移动边缘计算服务缓存和资源分配方法[J]. 航空学报, 2024, 45(19): 330017. |
| LI W, GUO Y, HE M, et al. Satisfaction-driven services caching and resource allocation for UAV mobile edge computing[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(19): 330017 (in Chinese). | |
| [7] | HUI M, CHEN J, YANG L, et al. UAV-assisted mobile edge computing: Optimal design of UAV altitude and task offloading[J]. IEEE Transactions on Wireless Communications, 2024, 23(10): 13633-13647. |
| [8] | 屈毓锛, 秦蓁, 马靖豪, 等. 面向空地协同移动边缘计算的服务布置策略[J]. 计算机学报, 2022, 45(4): 781-797. |
| QU Y B, QIN Z, MA J H, et al. Service provisioning for air-ground collaborative mobile edge computing[J]. Chinese Journal of Computers, 2022, 45(4): 781-797 (in Chinese). | |
| [9] | CAO L M, HUO T, LI S B, et al. Cost optimization in edge computing: A survey[J]. Artificial Intelligence Review, 2024, 57(11): 312. |
| [10] | CHAI Z Y, LIU X, LI Y L. A computation offloading algorithm based on multi-objective evolutionary optimization in mobile edge computing[J]. Engineering Applications of Artificial Intelligence, 2023, 121: 105966. |
| [11] | CUI Y Y, ZHANG D G, ZHANG T, et al. A novel offloading scheduling method for mobile application in mobile edge computing[J]. Wireless Networks, 2022, 28(6): 2345-2363. |
| [12] | FU S, ZHOU F H, HU R Q Y. Resource allocation in a relay-aided mobile edge computing system[J]. IEEE Internet of Things Journal, 2022, 9(23): 23659-23669. |
| [13] | EJAZ M, GUI J S, ASIM M, et al. RL-planner: Reinforcement learning-enabled efficient path planning in multi-UAV MEC systems[J]. IEEE Transactions on Network and Service Management, 2024, 21(3): 3317-3329. |
| [14] | CHEN C, GONG S M, ZHANG W J, et al. DRL-based contract incentive for wireless-powered and UAV-assisted backscattering MEC system[J]. IEEE Transactions on Cloud Computing, 2024, 12(1): 264-276. |
| [15] | LI B, LIU Y F, TAN L, et al. Digital twin assisted task offloading for aerial edge computing and networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(10): 10863-10877. |
| [16] | WANG L Y, ZHANG G L. Joint service caching, resource allocation and computation offloading in three-tier cooperative mobile edge computing system[J]. IEEE Transactions on Network Science and Engineering, 2023, 10(6): 3343-3353. |
| [17] | LI M, YU F R, SI P B, et al. UAV-assisted data transmission in blockchain-enabled M2M communications with mobile edge computing[J]. IEEE Network, 2020, 34(6): 242-249. |
| [18] | ZHANG S X, CAO R Y. Multi-objective optimization for UAV-enabled wireless powered IoT networks: An LSTM-based deep reinforcement learning approach[J]. IEEE Communications Letters, 2022, 26(12): 3019-3023. |
| [19] | LI L P, GUAN W Q, ZHAO C, et al. Trajectory planning, phase shift design, and IoT devices association in flying-RIS-assisted mobile edge computing[J]. IEEE Internet of Things Journal, 2024, 11(1): 147-157. |
| [20] | ZHANG S, JIN H L, GUO P K. IRS-assisted energy efficient communication for UAV mobile edge computing[J]. Computer Networks, 2024, 246: 110387. |
| [21] | AL-HILO A, SAMIR M, ELHATTAB M, et al. RIS-assisted UAV for timely data collection in IoT networks[J]. IEEE Systems Journal, 2023, 17(1): 431-442. |
| [22] | SHI J L, LI C Y, GUAN Y C, et al. Multi-UAV-assisted computation offloading in DT-based networks: A distributed deep reinforcement learning approach[J]. Computer Communications, 2023, 210: 217-228. |
| [23] | ZHAO X, ZHAO T H, WANG F Y, et al. SAC-based UAV mobile edge computing for energy minimization and secure data transmission[J]. Ad Hoc Networks, 2024, 157: 103435. |
| [24] | LI B, XIE W C, YE Y H, et al. FlexEdge: Digital twin-enabled task offloading for UAV-aided vehicular edge computing[J]. IEEE Transactions on Vehicular Technology, 2023, 72(8): 11086-11091. |
| [25] | JIANG W W, AI B, LI M S, et al. Aerial-IRSs-assisted energy-efficient task offloading and computing[J]. IEEE Internet of Things Journal, 2024, 11(11): 20178-20193. |
| [26] | YU Y, TANG J, HUANG J Y, et al. Multi-objective optimization for UAV-assisted wireless powered IoT networks based on extended DDPG algorithm[J]. IEEE Transactions on Communications, 2021, 69(9): 6361-6374. |
| [27] | ZHOU C H, WU W, HE H L, et al. Deep reinforcement learning for delay-oriented IoT task scheduling in SAGIN[J]. IEEE Transactions on Wireless Communications, 2021, 20(2): 911-925. |
| [28] | 季薇, 杨许鑫, 李飞, 等. 无人机辅助MEC系统中基于最优SIC顺序的能耗优化方案[J]. 通信学报, 2024, 45(2): 18-30. |
| JI W, YANG X X, LI F, et al. Energy consumption optimization scheme in UAV-assisted MEC system based on optimal SIC order[J]. Journal on Communications, 2024, 45(2): 18-30 (in Chinese). | |
| [29] | YI X J, YU H Y, XU T. Solving multi-objective weapon-target assignment considering reliability by improved MOEA/D-AM2M[J]. Neurocomputing, 2024, 563: 126906. |
| [30] | WANG P F, YANG H, HAN G J, et al. Decentralized navigation with heterogeneous federated reinforcement learning for UAV-enabled mobile edge computing[J]. IEEE Transactions on Mobile Computing, 2024, 23(12): 13621-13638. |
| [31] | HAO H, XU C Q, ZHANG W, et al. Joint task offloading, resource allocation, and trajectory design for multi-UAV cooperative edge computing with task priority[J]. IEEE Transactions on Mobile Computing, 2024, 23(9): 8649-8663. |
| [32] | PERVEZ F, SULTANA A, YANG C G, et al. Energy and latency efficient joint communication and computation optimization in a multi-UAV-assisted MEC network[J]. IEEE Transactions on Wireless Communications, 2024, 23(3): 1728-1741. |
| [33] | SONG F H, DENG M S, XING H L, et al. Energy-efficient trajectory optimization with wireless charging in UAV-assisted MEC based on multi-objective reinforcement learning[J]. IEEE Transactions on Mobile Computing, 2024, 23(12): 10867-10884. |
| [34] | JIN J L, XU Y J. Optimal policy characterization enhanced proximal policy optimization for multitask scheduling in cloud computing[J]. IEEE Internet of Things Journal, 2022, 9(9): 6418-6433. |
| [35] | SHEN S G, HAO X B, GAO Z J, et al. SAC-PP: Jointly optimizing privacy protection and computation offloading for mobile edge computing[J]. IEEE Transactions on Network and Service Management, 2024, 21(6): 6190-6203. |
| [36] | TAN L, GUO S T, ZHOU P Z, et al. HAT: Task offloading and resource allocation in RIS-assisted collaborative edge computing[J]. IEEE Transactions on Network Science and Engineering, 2024, 11(5): 4665-4678. |
| [1] | Haoyu WANG, Zexu ZHANG, Shan WEN, Jinlong LIU, Beixiao ZHU, Weimin BAO. Task allocation algorithm for UAV swarm based on temporal coupling analysis [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(2): 332075-332075. |
| [2] | Pan ZHOU, Ni LI, Jiangtao HUANG, Qinglin YANG, Yunxiao LIAN. Autonomous decision-making in close-range game under imperfect information for unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732215-732215. |
| [3] | Rongzu LI, Li LIU, Dun YANG. Optimal design of hydrogen-powered UAV based on multi-source domain fusion surrogate model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 630979-630979. |
| [4] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [5] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [6] | Fujie WU, Bowen WANG, Jingya QI, Mingzhi CAO, Yingjun SANG, Sheng LI, Yuzhen ZHANG, Qian CHEN, Chao ZUO. A review of airborne multi-aperture panoramic image compositing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630505-630505. |
| [7] | Min YANG, Guanjun LIU, Ziyuan ZHOU. Control of lunar landers based on secure reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630553-630553. |
| [8] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [9] | Qichao XIE, Chengyu CAO, Yiyun ZHAO, Fanbiao LI. Integrated guidance and control method based on deep reinforcement learning parameter tuning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 632345-632345. |
| [10] | Guocheng YAN, Honglun WANG, Yanxiang WANG, Yuebin LUN, Junfan ZHU. Prescribed performance anti-swing control for wing rotation process of UAV towed aerial recovery [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 331840-331840. |
| [11] | Wei HUANG, Jiahao PAN, Chu HE. Wavelet time-frequency localization-based model compression for UAV object detection [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631952-631952. |
| [12] | Anping ZHANG, Hao DONG. UAV swarms and their takeoff method for high-end warfare [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331034-331034. |
| [13] | Yahang SONG, Xin ZHANG, Zhiming MA, Zhengyu ZUO. Airfoil gust alleviation using a plasma actuator in low-speed wind tunnel test [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 131975-131975. |
| [14] | Yicheng SONG, Ruiyun QI, Bin JIANG. Distributed topology reconstruction of UAV formation network under communication fault [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331914-331914. |
| [15] | Chen WANG, Caisheng WEI, Zeyang YIN, Kai JIN, Xingchen LI. Collaborative planning of multi-UAV trajectories and communication strategies considering channel resource constraints [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 331837-331837. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341