Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (9): 532491.doi: 10.7527/S1000-6893.2025.32491
• Special Issue: Safety Control Technology of Advanced Aircraft • Previous Articles Next Articles
Zhaoxing LI1, Lin YANG2, Xia WANG3, Bin XU1( )
)
Received:2025-06-28
Revised:2025-07-21
Accepted:2025-12-15
Online:2026-05-15
Published:2025-12-23
Contact:
Bin XU
E-mail:smileface.binxu@gmail.com
Supported by:CLC Number:
Zhaoxing LI, Lin YANG, Xia WANG, Bin XU. Finite-time deep stall recovery control for fighter aircraft using forced oscillation[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532491.
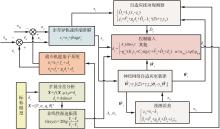
Fig.1
Block diagram of fighter deep stall recovery control system
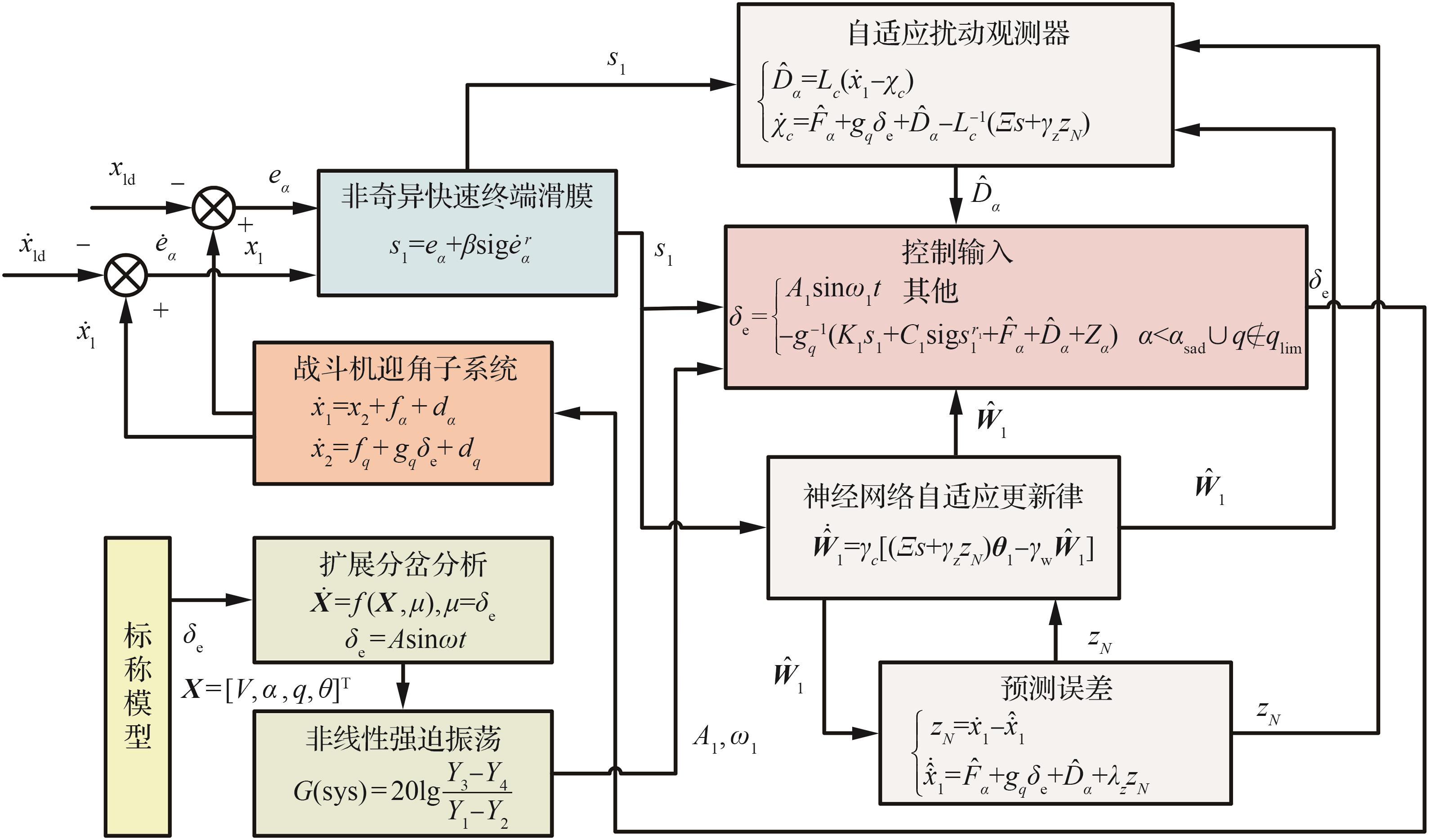

Fig.2
Bifurcation diagrams with elevator deflection angle as continuation parameters
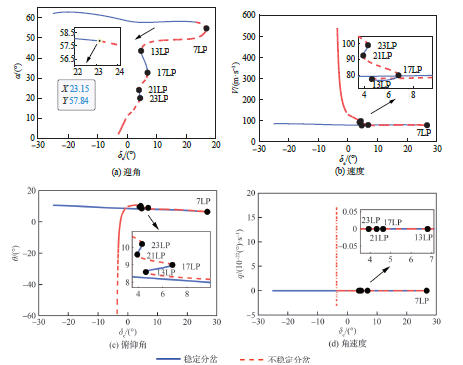

Fig.3
Aircraft aerodynamic parameters
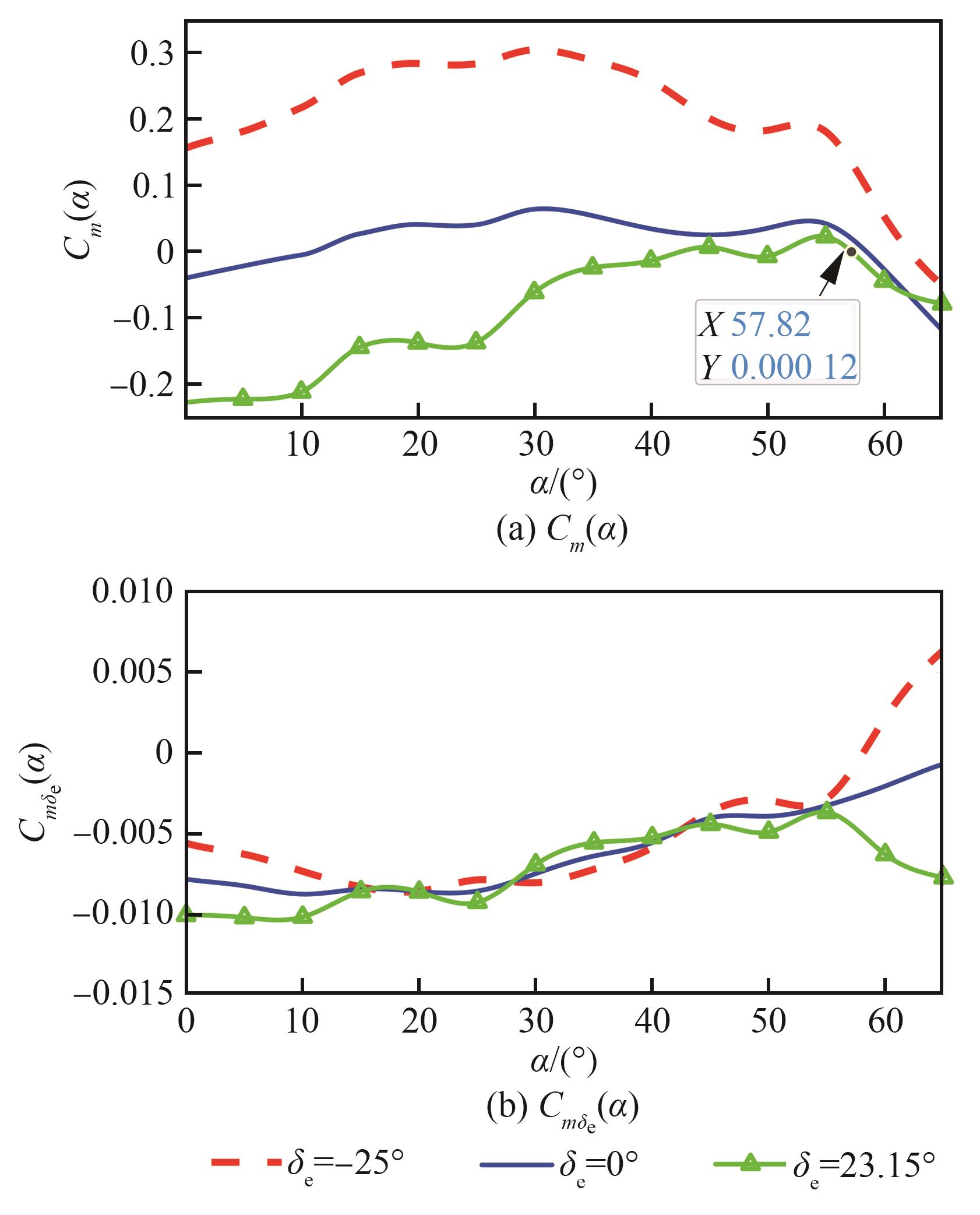
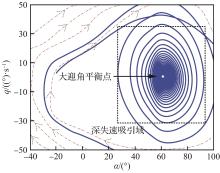
Fig.4
Phase portrait and deep-stall envelop at δe=-25°
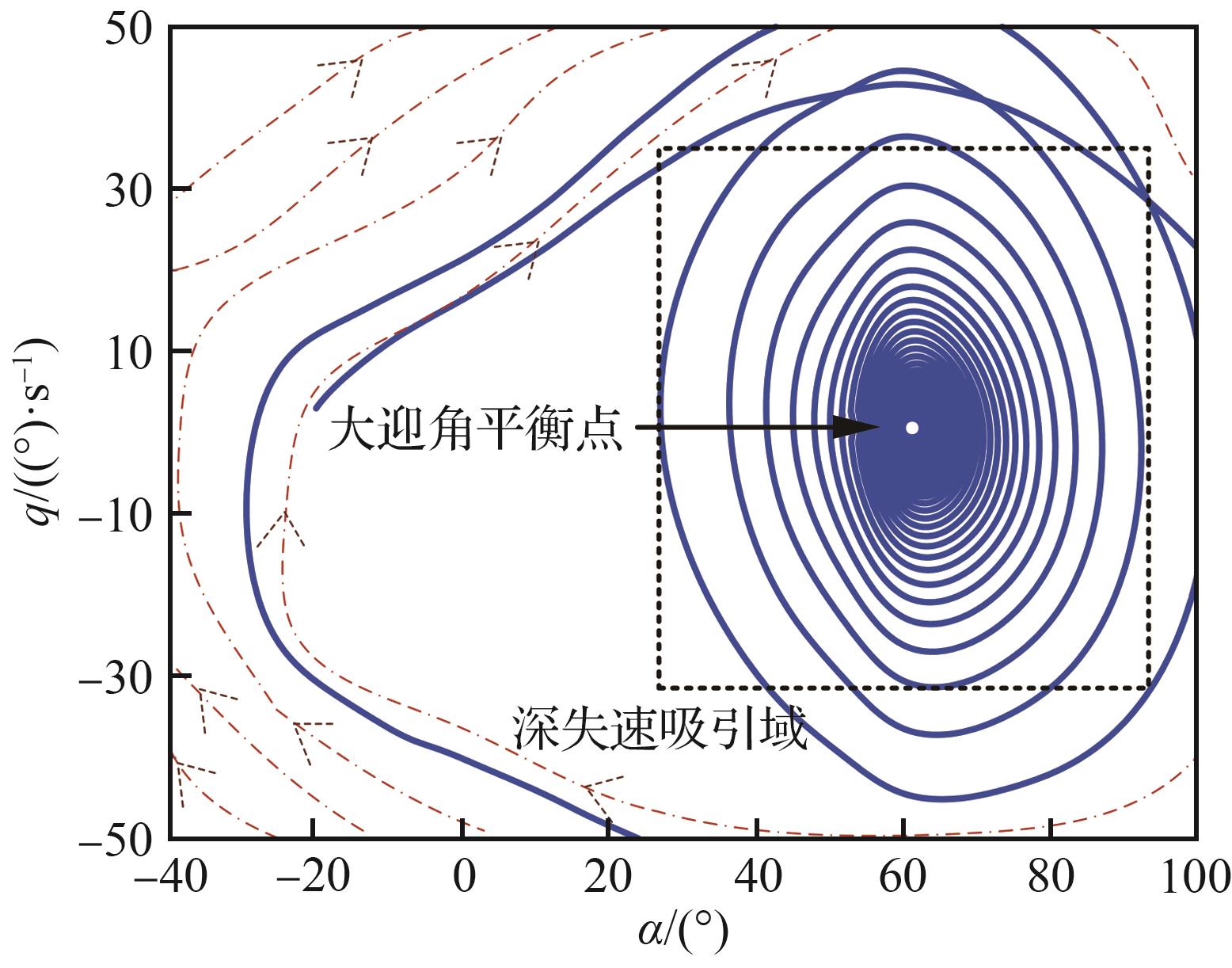
Fig.5
Phase portrait and deep-stall envelop at δe=0°
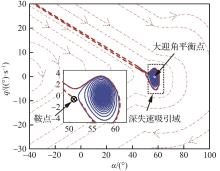
Fig.6
Phase portrait and deep-stall envelop at
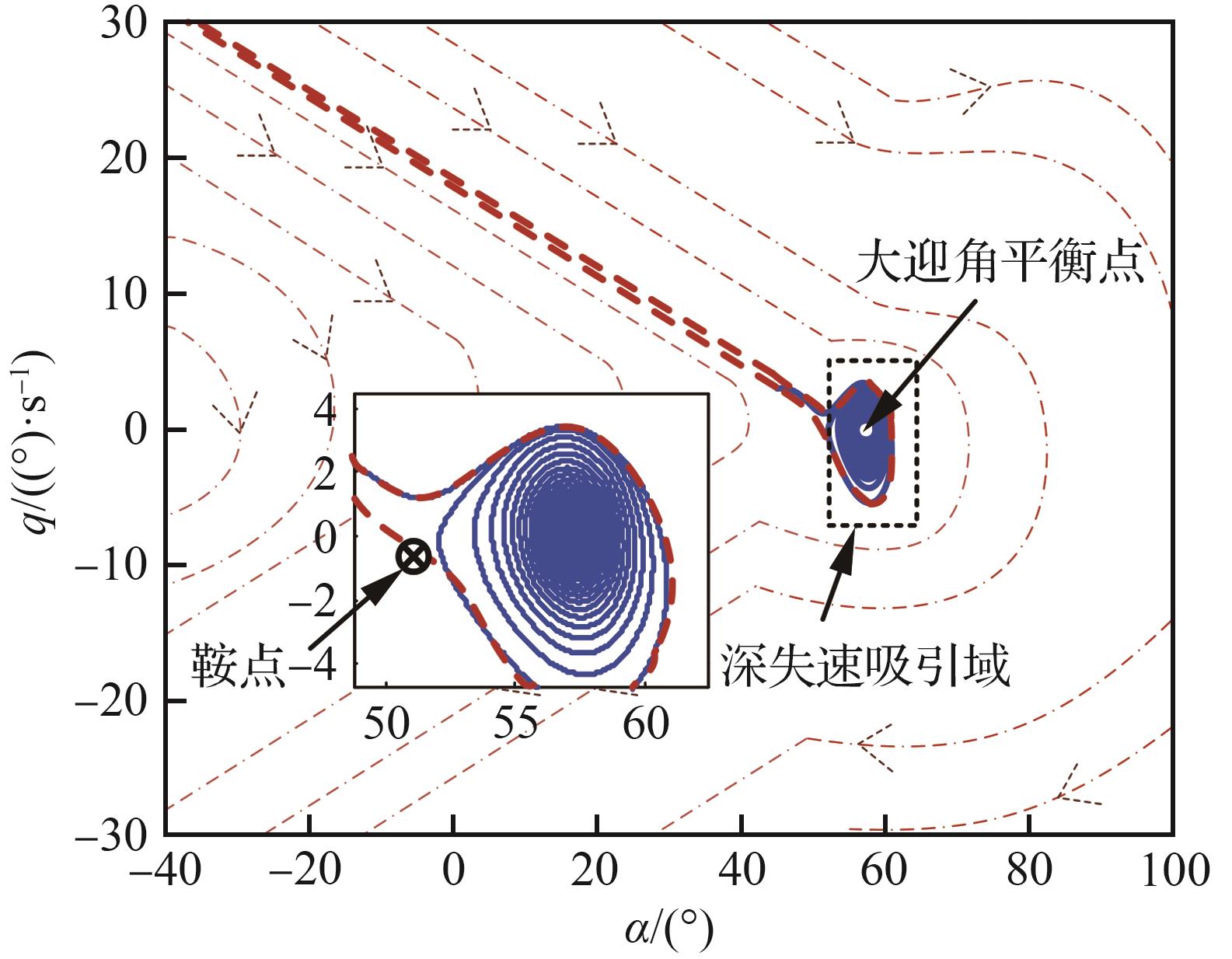
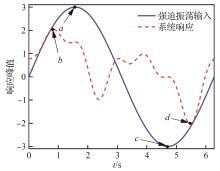
Fig.7
Examples of nonlinear forced response
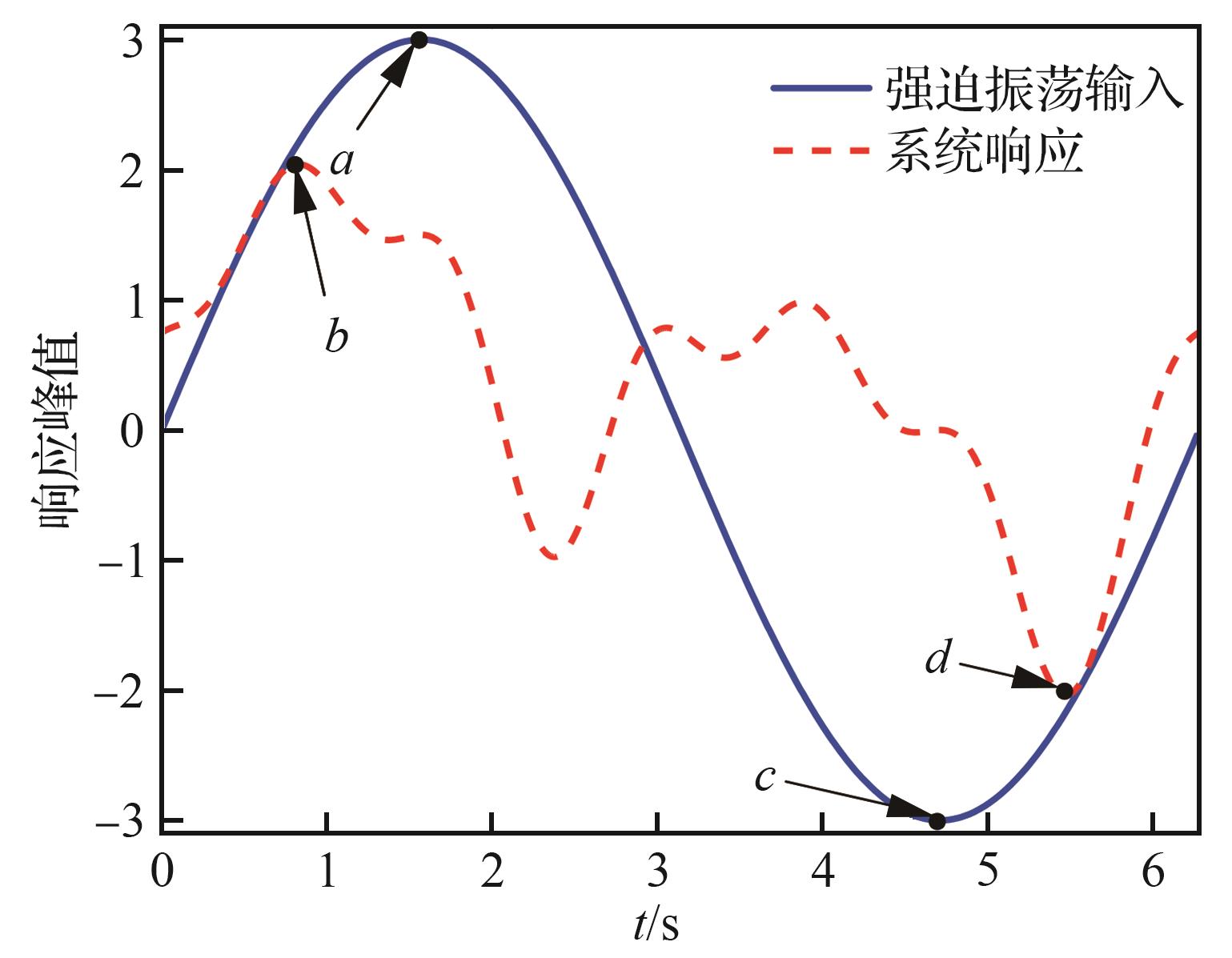
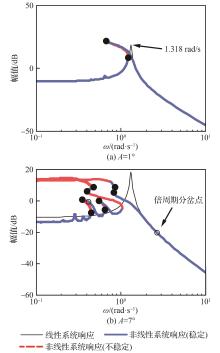
Fig.8
Linear and nonlinear frequency responses at 1° and 7° forcing amplitude
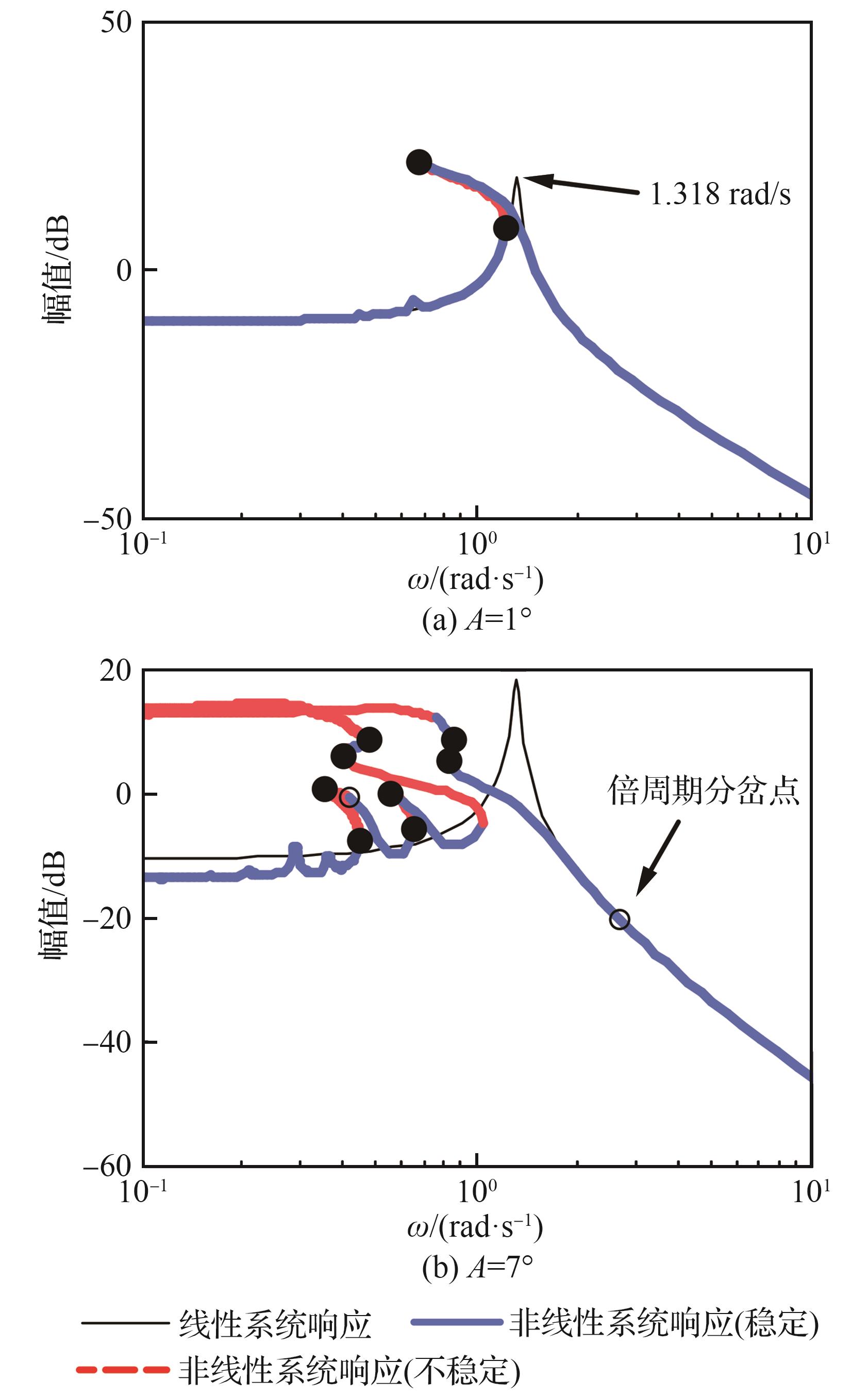
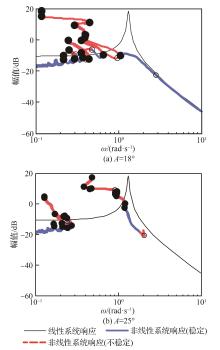
Fig.9
Linear and nonlinear frequency responses at 18° and 25° forcing amplitude
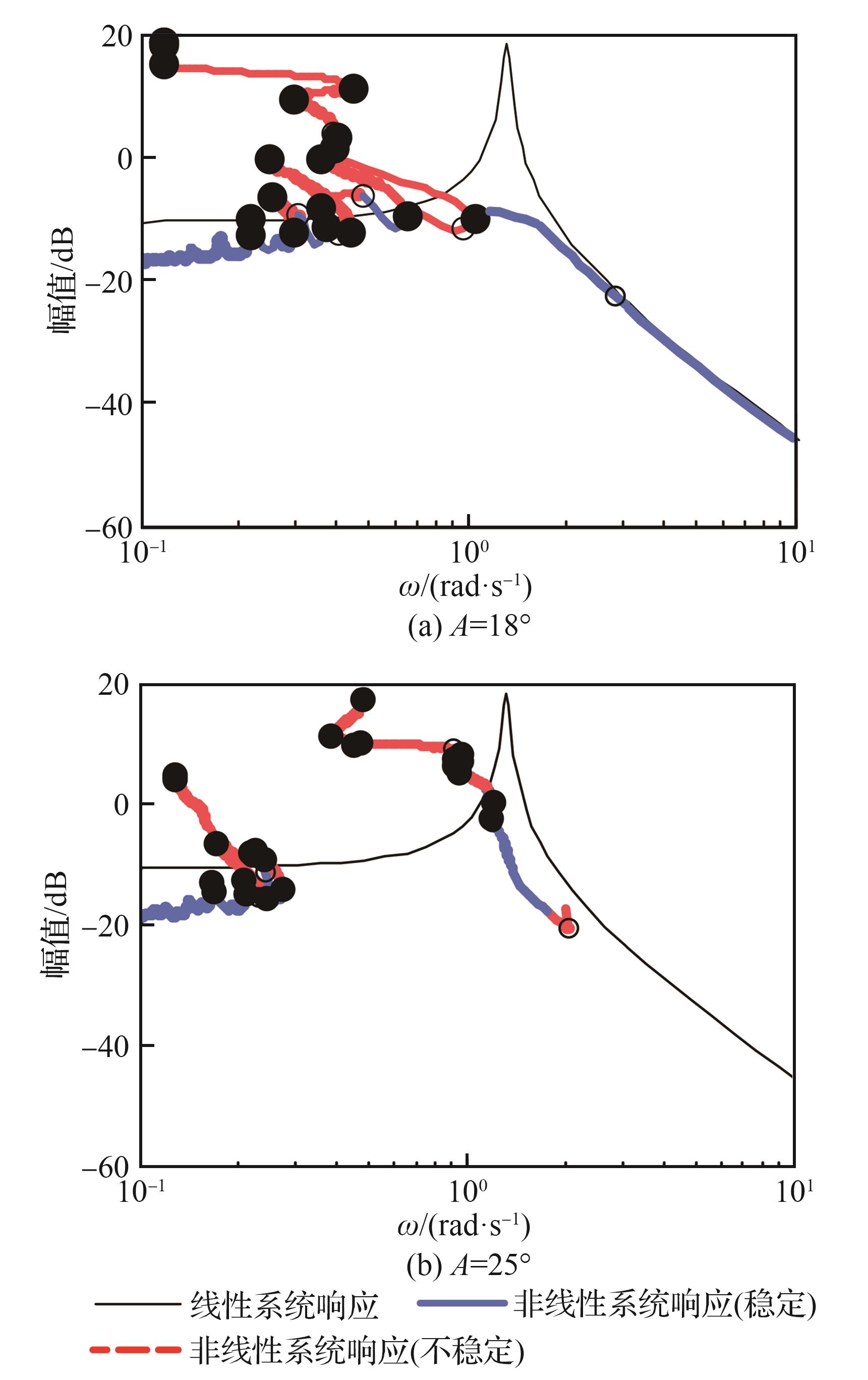
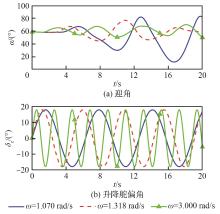
Fig.10
Attack angle and elevator deflection angle responses at different forcing amplitudes
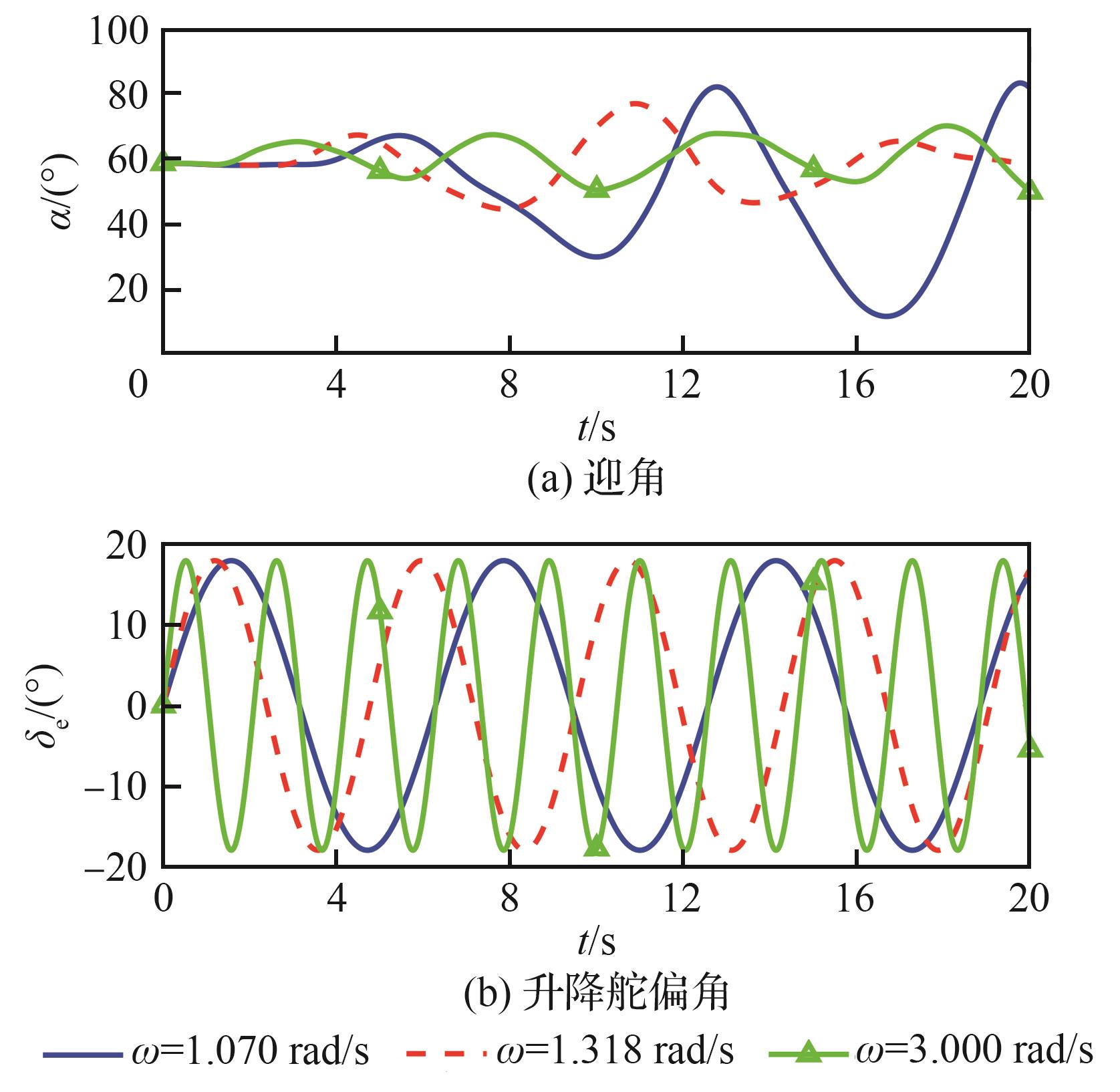
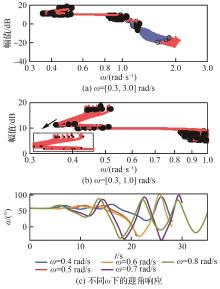
Fig.11
Nonlinear frequency responses at A=25° under 30% randomly biased aerodynamic parameters
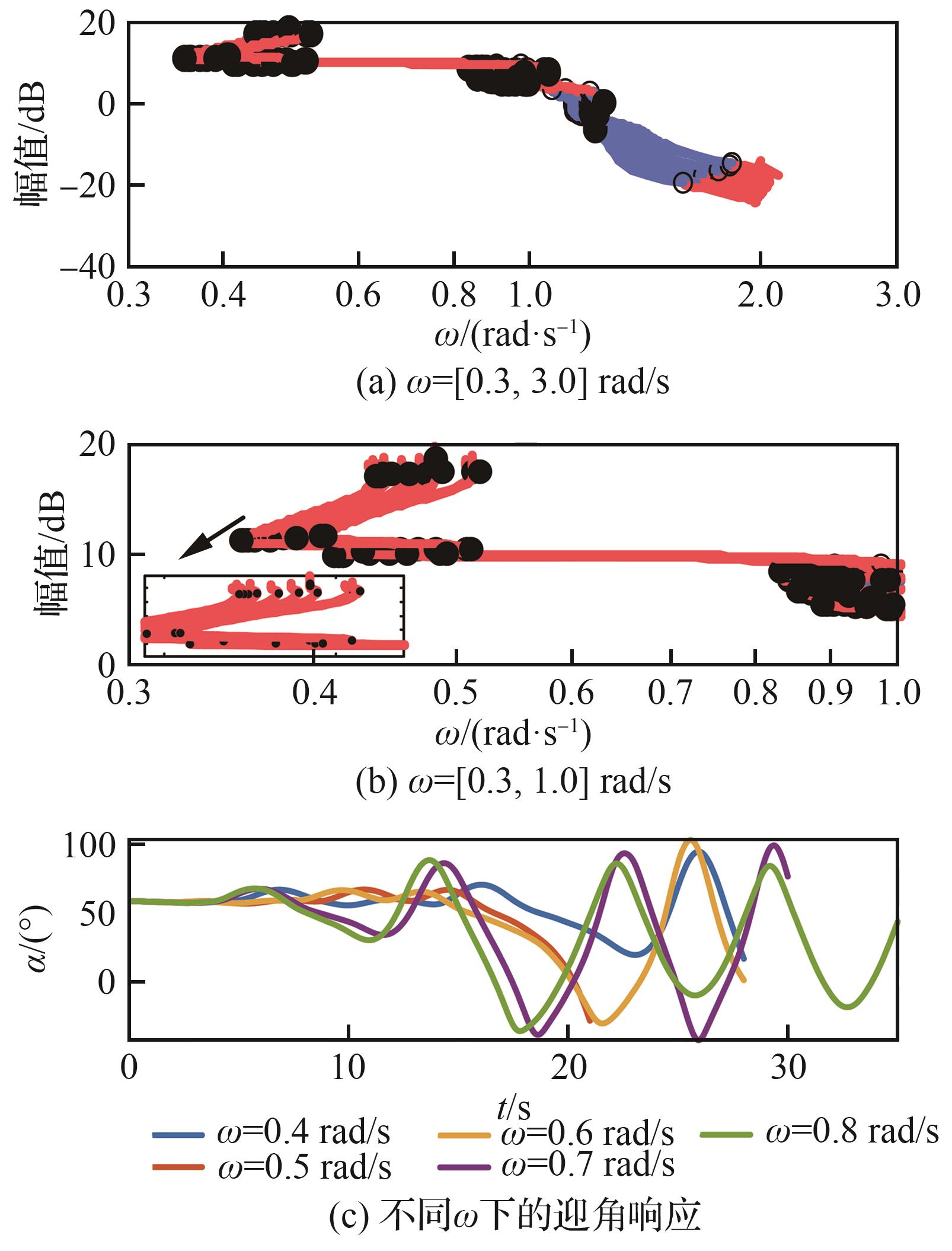
Table 1
Aircraft parameters
| 参数 | 数值 |
|---|---|
| 机翼参考面积 | 28.87 |
| 平均气动弦长 | 3.450 3 |
| 飞机质量 | 9 294 |
| 俯仰轴的转动惯量 | 75 643 |
| 重力加速度 | 9.81 |
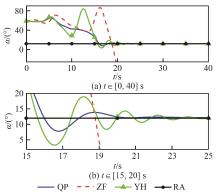
Fig.12
Attack angle responses at different deep stall recover methods
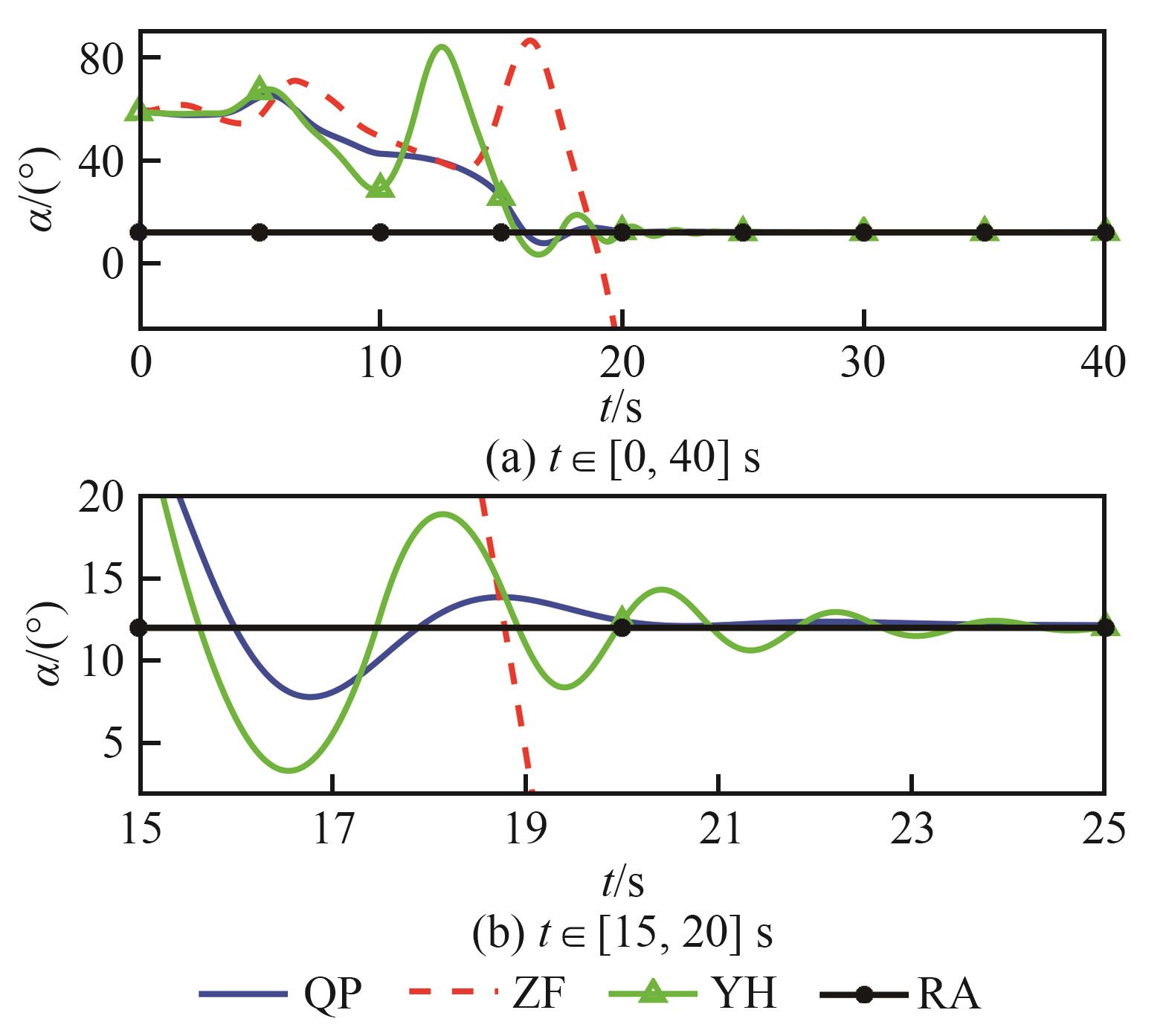
Fig.13
Pitch angle and angular rate responses at different deep stall recover methods
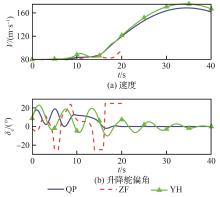
Fig.14
Speed and elevator deflection angle under different deep stall recover methods
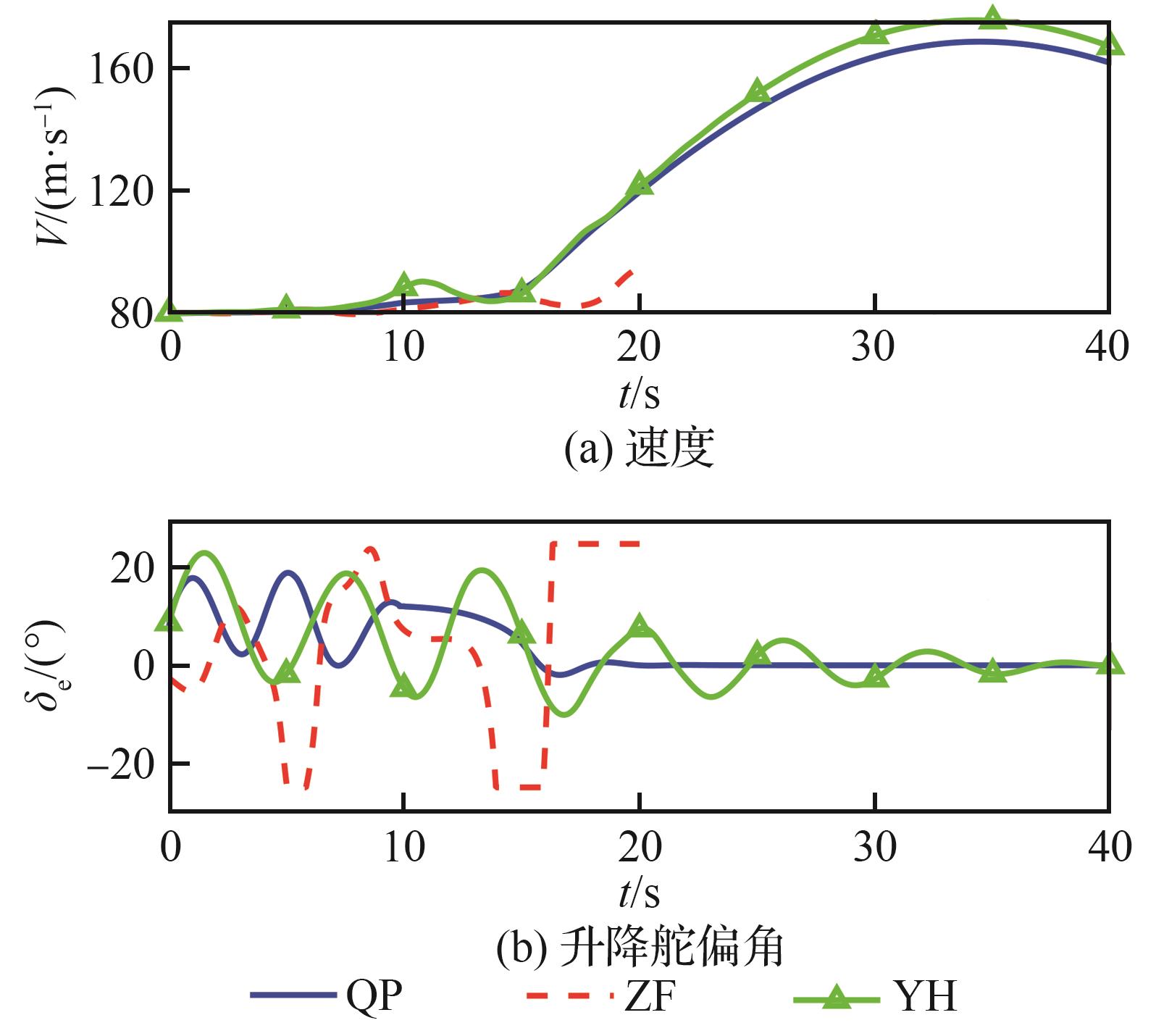

Fig.15
Neural network weights norm and phase portrait at different deep stall recover methods
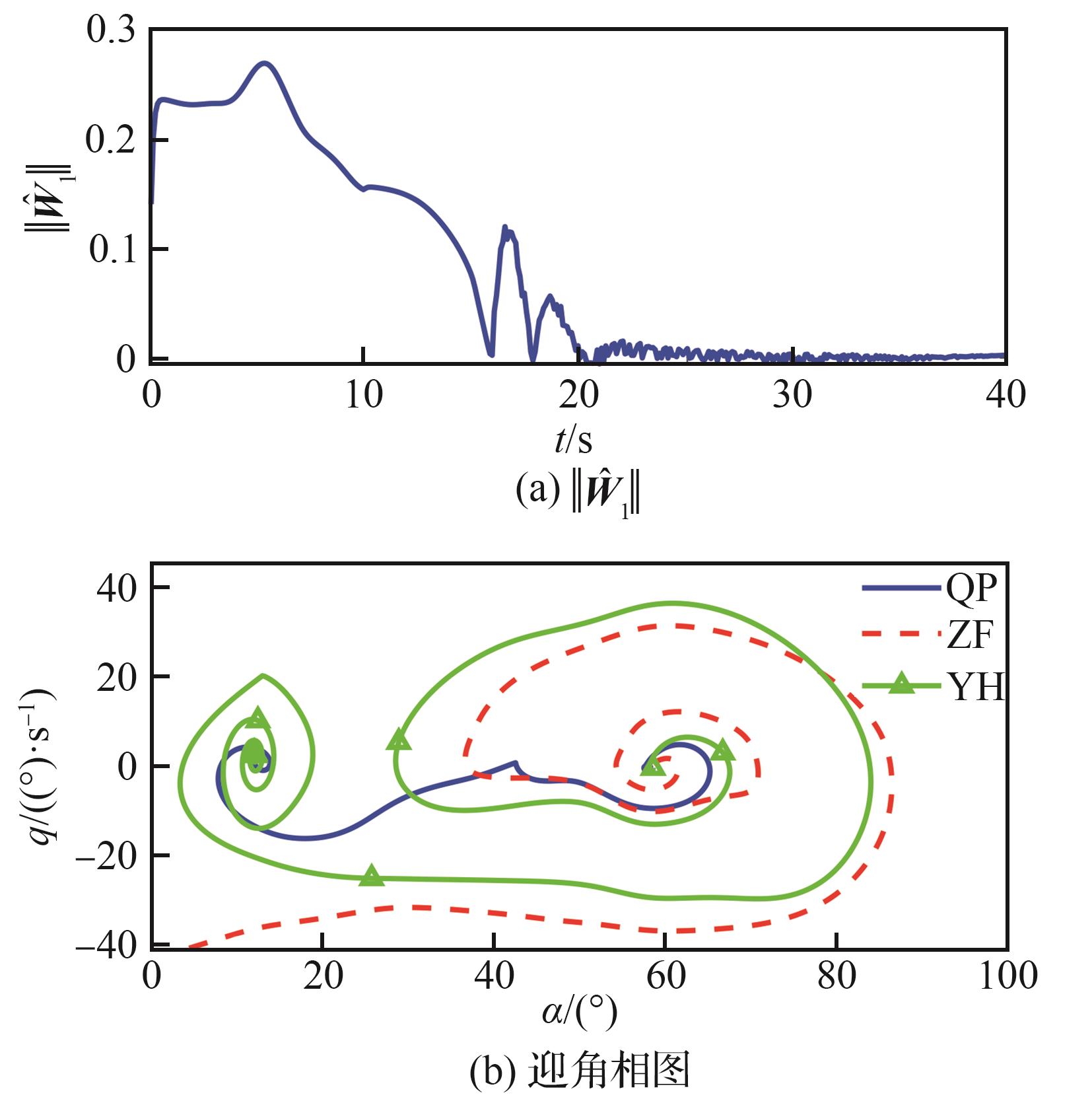
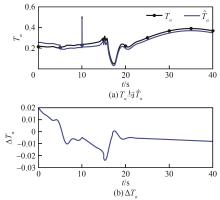
Fig.16
True value and estimated value of Tα
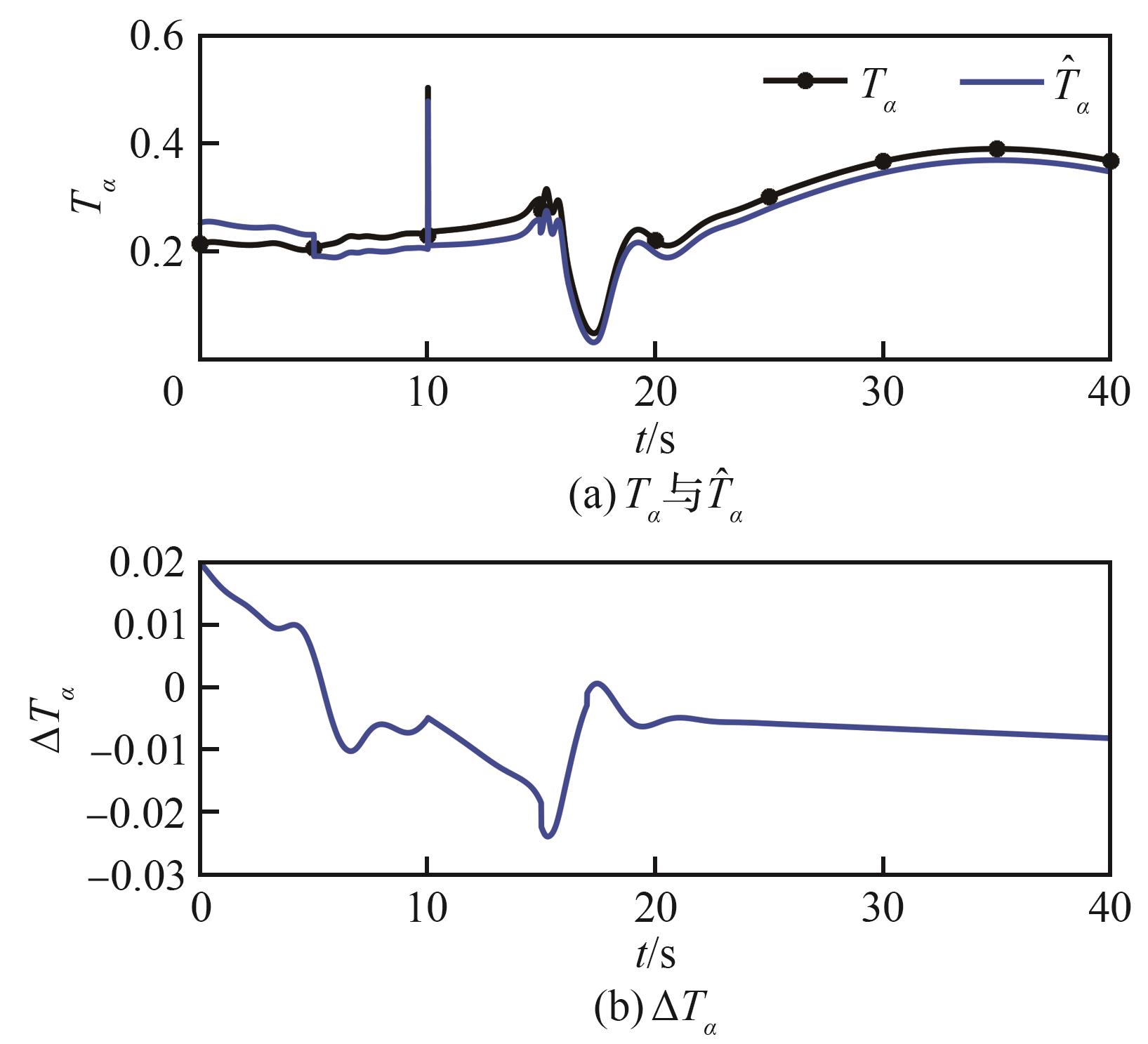

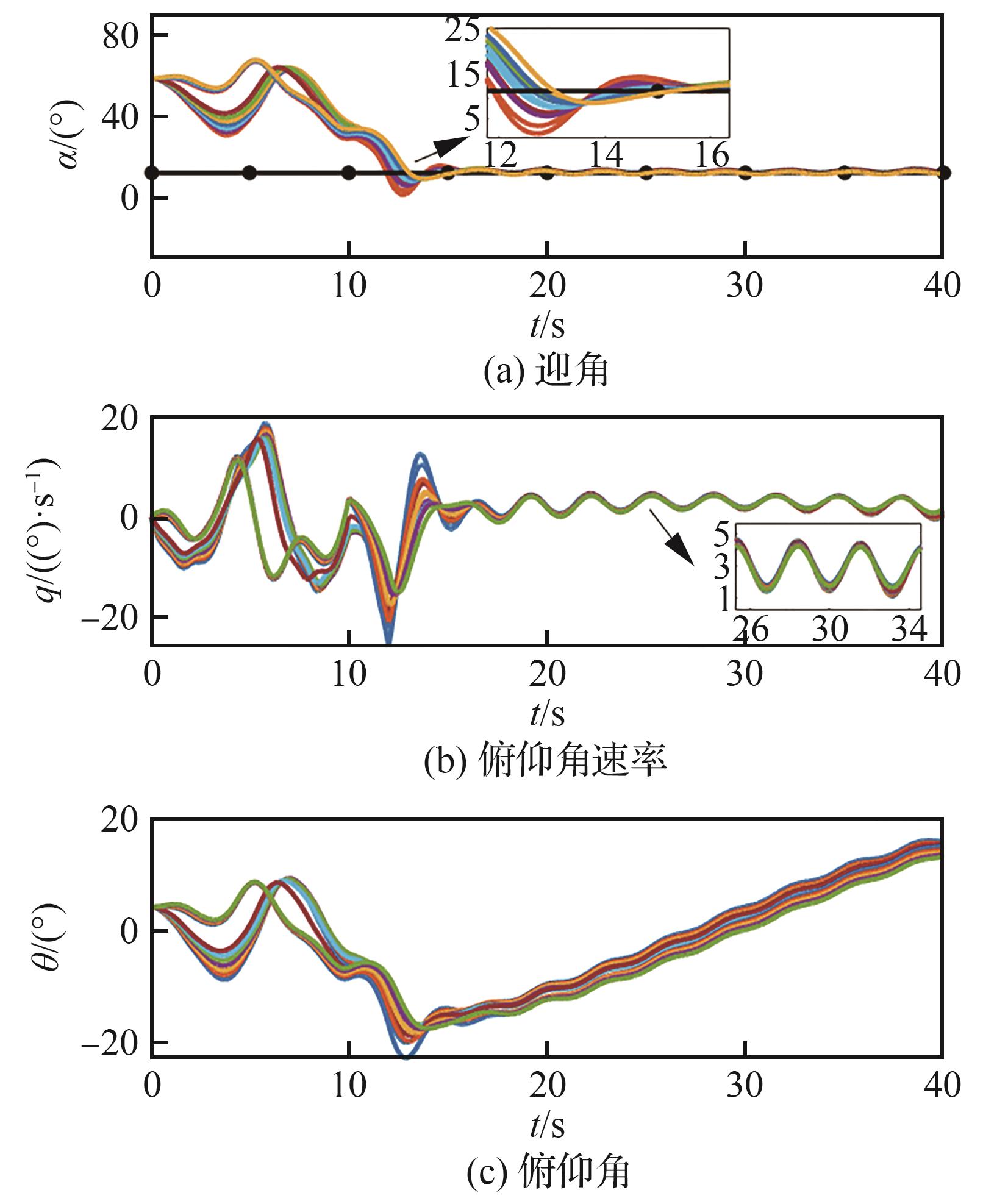
Fig.17
Robustness test results
| [1] | 张子军, 赵彤, 孙烨, 等. 飞机大迎角飞行问题研究综述[J]. 航空工程进展, 2022, 13(3): 74-85. |
| ZHANG Z J, ZHAO T, SUN Y, et al. Review of the study on high-angle-of-attack flight problems of aircraft[J]. Advances in Aeronautical Science and Engineering, 2022, 13(3): 74-85 (in Chinese). | |
| [2] | 于目航, 王霞, 杨林, 等. 面向战机大迎角机动过程的智能学习控制[J]. 自动化学报, 2024, 50(4): 719-730. |
| YU M H, WANG X, YANG L, et al. Intelligent learning control for fighter maneuvers at high angle of attack[J]. Acta Automatica Sinica, 2024, 50(4): 719-730 (in Chinese). | |
| [3] | 陈永亮, 沈宏良, 刘昶. 飞机深失速改出特性分析与控制[J]. 南京航空航天大学学报, 2007, 39(4): 435-439. |
| CHEN Y L, SHEN H L, LIU C. Analysis and control of aircraft deep stall recovery characteristics[J]. Journal of Nanjing University of Aeronautics Astronautics, 2007, 39(4): 435-439 (in Chinese). | |
| [4] | 付军泉, 史志伟, 耿玺, 等. 基于试验分岔分析的翼身融合飞行器纵向稳定性[J]. 航空学报, 2022, 43(1): 124931. |
| FU J Q, SHI Z W, GENG X, et al. Longitudinal stability of blended-wing-body aircraft based on experimental bifurcation analysis[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(1): 124931 (in Chinese). | |
| [5] | ILOPUTAIFE O I. Design of deep stall protection for the C-17A[J]. Journal of Guidance, Control, and Dynamics, 1997, 20(4): 760-767. |
| [6] | 陶呈纲, 林传健, 铁钰嘉, 等. 透过NGAD的可控性评估准则研究[J]. 航空学报, 2024, 45(17): 530083. |
| TAO C G, LIN C J, TIE Y J, et al. Controllability evaluation criteria research based on NGAD[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530083 (in Chinese). | |
| [7] | JIANG Y, LI D C, KAN Z, et al. Bifurcation analysis of wing rock and routes to chaos of a low aspect ratio flying wing[J]. Nonlinear Dynamics, 2024, 112(23): 21491-21508. |
| [8] | SALAHUDDEN, GHOSH A K. Robust control design based aircraft flat-spin recovery using optimally deflected novel deployable fin[J]. Aerospace Science and Technology, 2021, 115: 106823. |
| [9] | DEFAZIO R L. Final committee report on the design, development, and certification of the boeing-737-max[EB/OL]. (2020-12-22)[2025-05-06]. . |
| [10] | SALAHUDDEN S, DAS A T, GHOSH A K. Sliding-mode control and strategic thrust-vectoring based aircraft flat spin recovery with altitude loss minimization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 3271-3282. |
| [11] | XU J L, GU R, HUANG S. Exploring the impact of vector thrust on aircraft maneuverability utilizing bypass dual throat nozzle technology[J]. Aerospace Science and Technology, 2025, 156: 109765. |
| [12] | ASADI M, BEHNAMGOL V, VALI A R. Finite time thrust vector tracker based on a new smooth second order adaptive sliding mode controller[J]. International Journal of Research and Technology in Electrical Industry, 2024, 3(1): 299-308. |
| [13] | GOUSMAN K, LOSCHKE R, ROONEY R, et al. Aircraft deep stall analysis and recovery: AIAA-1991-2888[R]. Reston: AIAA, 1991. |
| [14] | NGUYEN L T. Simulator study of stall/post-stall characteristics of a fighter airplane with relaxed longitudinal static stability[M]. Washington, D.C.: NASA, 1979: 49-58. |
| [15] | MONTGOMERY R C, MOUL M T. Analysis of deep-stall characteristics of T-tailed aircraft configurations and some recovery procedures[J]. Journal of Aircraft, 1966, 3(6): 562-566. |
| [16] | GARCÍA PÉREZ J, GHADAMI A, SANCHES L, et al. Data-driven bifurcation analysis of experimental aeroelastic systems using preflutter measurements[J]. AIAA Journal, 2024, 62(5): 1906-1914. |
| [17] | NGUYEN D H, LOWENBERG M H, NEILD S A. A graphical approach to examining classical extremum seeking using bifurcation analysis[J]. IEEE Transactions on Control Systems Technology, 2023, 31(3): 1324-1335. |
| [18] | NGUYEN D H, GOMAN M G, LOWENBERG M H, et al. Evaluating longitudinal unsteady aerodynamic effects in stall for a T-tail transport model[J]. Journal of Aircraft, 2022, 59(4): 964-976. |
| [19] | XU K, YIN Y, YANG Y X, et al. Bifurcation analysis of dual-sidestay landing gear locking performance considering joint clearance[J]. Chinese Journal of Aeronautics, 2022, 35(7): 209-226. |
| [20] | WANG X, YU M H, YANG L, et al. Airflow angles estimation-based finite-time adaptive neural control for aircraft at high-angle-of-attack maneuvers[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(8): 5126-5136. |
| [21] | KOLB S, MONTAGNIER O, HÉTRU L, et al. Real-time detection of an aircraft deep stall and recovery procedure[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(5): 1185-1194. |
| [22] | CUNIS T, CONDOMINES J P, BURLION L. Sum-of-squares flight control synthesis for deep-stall recovery[J]. Journal of Guidance, Control, and Dynamics, 2020, 43(8): 1498-1511. |
| [23] | FAN Q Y, CAI M Y, XU B. An improved prioritized DDPG based on fractional-order learning scheme[J]. IEEE Transactions on Neural Networks and Learning Systems, 2025, 36(4): 6873-6882. |
| [24] | NGUYEN D H, LOWENBERG M H, NEILD S A. Derivation of control inputs for deep stall recovery using nonlinear frequency analysis[J]. The Aeronautical Journal, 2023, 127: 232-254. |
| [25] | MING R C, LIU X X, XU X L, et al. Application of reinforcement learning in deep-stall recovery[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(4): 10581-10594. |
| [26] | NGUYEN D H, LOWENBERG M H, NEILD S A. Analysing dynamic deep stall recovery using a nonlinear frequency approach[J]. Nonlinear Dynamics, 2022, 108(2): 1179-1196. |
| [27] | MOUSTAFA E, ABOU-ZALAM B, SOBAIH A A, et al. Optimized fuzzy fractional-order controller for a nonlinear chaos system with period-doubling bifurcation analysis[J]. International Journal of Control, Automation and Systems, 2023, 21(10): 3492-3503. |
| [28] | WANG X, YANG L, XU B, et al. Fixed-time robust neural learning control for nonlinear strict-feedback systems with prescribed performance[J]. International Journal of Robust and Nonlinear Control, 2025, 35(3): 1269-1280. |
| [29] | YU J P, SHI P, ZHAO L. Finite-time command filtered backstepping control for a class of nonlinear systems[J]. Automatica, 2018, 92: 173-180. |
| [1] | Yuwei CUI, Xianfeng MENG, Sicheng ZHANG, Aijun LI. A fault-tolerant method for flight control system based on new network distributed architecture [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532525-532525. |
| [2] | Rong YUAN, Chenyuan WU, Shuyi SHAO, Mou CHEN. Anti-saturation control of fixed-wing unmanned aerial vehicle under disturbance and sensor failure [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532487-532487. |
| [3] | Jing ZHAO, Long PAN, Ningyun LU, Haiyun HUANG, Yajie MA, Fengyu XU. A novel nonsingular terminal sliding mode control for aerial robot based on fixed-time disturbance observer [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532278-532278. |
| [4] | Kenan YONG, Mou CHEN. Safety flight control for aggressive maneuvering of unmanned autonomous helicopters under multi-class and multi-type constraints [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532472-532472. |
| [5] | Xin HUANG, Jiahe ZOU, Shuyi XIAO, Xiaohang LI. An adaptive control strategy for defending against cyber stealthy attacks [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332290-332290. |
| [6] | Yuying GUO, Lanxin LIAO, Xiaoqiang ZHANG, Youmin ZHANG, Kai WANG. Finite-time fault-tolerant control of compound actuator faults for unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332659-332659. |
| [7] | Zhihao HE, Peng KOU, Bohua LIANG, Deliang LIANG. Powered yaw predictive control of distributed electric propulsion aircraft considering slipstream effects [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732305-732305. |
| [8] | Zhongke SHI. Qualitative theory for engineering system and its application to flight control [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531463-531463. |
| [9] | Mou CHEN, Zhengguo HUANG, Yaohua SHEN, Fan LIU. Overview of composite anti-disturbance control technology of advanced vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531303-531303. |
| [10] | Jinwu XIANG, Kai MA, Zi KAN, Daochun LI, Kexin ZHENG, Hanxuan CHEN. Review of key technologies for hydrogen powered unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531603-531603. |
| [11] | Zhenbing LUO, Hao WANG, Zhijie ZHAO. Theory of dual synthetic jets and its empowerment of advancements in aeronautical technology [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531821-531821. |
| [12] | Shang TAI, Lixin WANG, Yanguo HU, Haoze WU, Kai HUANG, Hailiang LIU, Ting YUE. Similarity criterion of flight control law parameters for scaled-model of supersonic aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(20): 531885-531885. |
| [13] | Yuchun ZOU, Chenggang TAO, Ziyang ZHEN, Zhibin YIN, Yikun CHEN. Precision landing control based on direct force for flying-wing carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531422-531422. |
| [14] | Qi ZHU, Jingping SHI, Yiwei ZHANG, Xiaobo QU, Yongxi LYU. A high-precision transition trajectory optimization and control method for shipborne VTOL aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 532155-532155. |
| [15] | Zhibing ZHANG, Ziyang ZHEN. Research progress on guidance and control of fixed-wing manned and unmanned carrier-based aircraft landing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 532336-532336. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341