Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (9): 532494.doi: 10.7527/S1000-6893.2025.32494
• Special Issue: Safety Control Technology of Advanced Aircraft • Previous Articles Next Articles
Ying AO1, Hao CHEN1( ), Huiming LI1, Kun XIAO2, Xiangke WANG1
), Huiming LI1, Kun XIAO2, Xiangke WANG1
Received:2025-06-30
Revised:2025-08-11
Accepted:2025-09-09
Online:2026-05-15
Published:2025-09-24
Contact:
Hao CHEN
E-mail:chenhao09@nudt.edu.cn
Supported by:CLC Number:
Ying AO, Hao CHEN, Huiming LI, Kun XIAO, Xiangke WANG. Hierarchical control method for affine formation of fixed-wing UAV swarm[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532494.
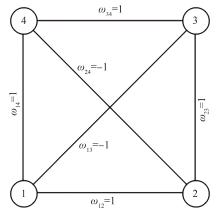
Fig.1
Square formation schematic diagram
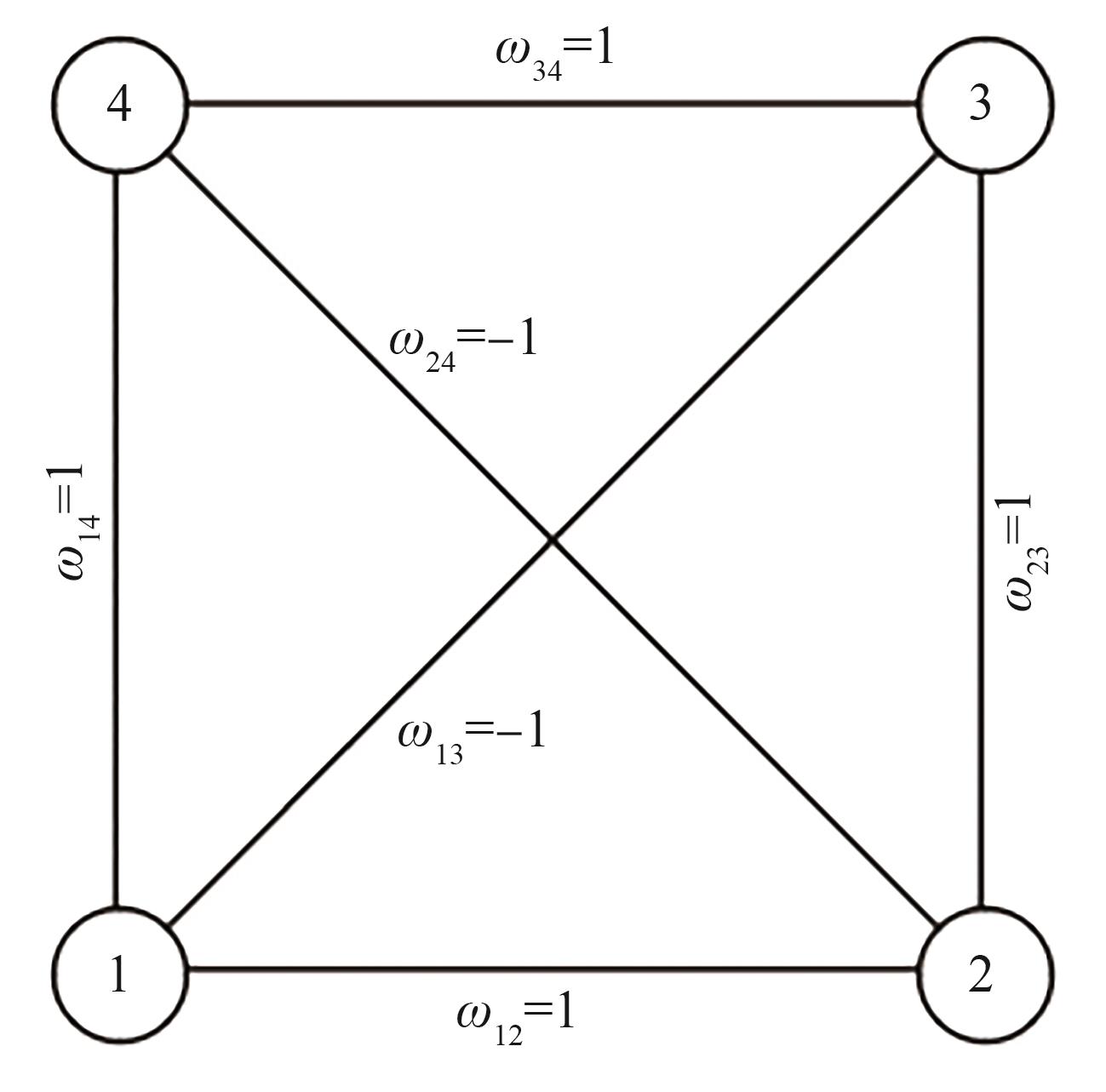
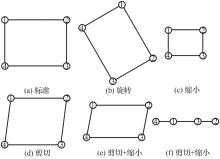
Fig.2
Schematic diagram of affine transformation
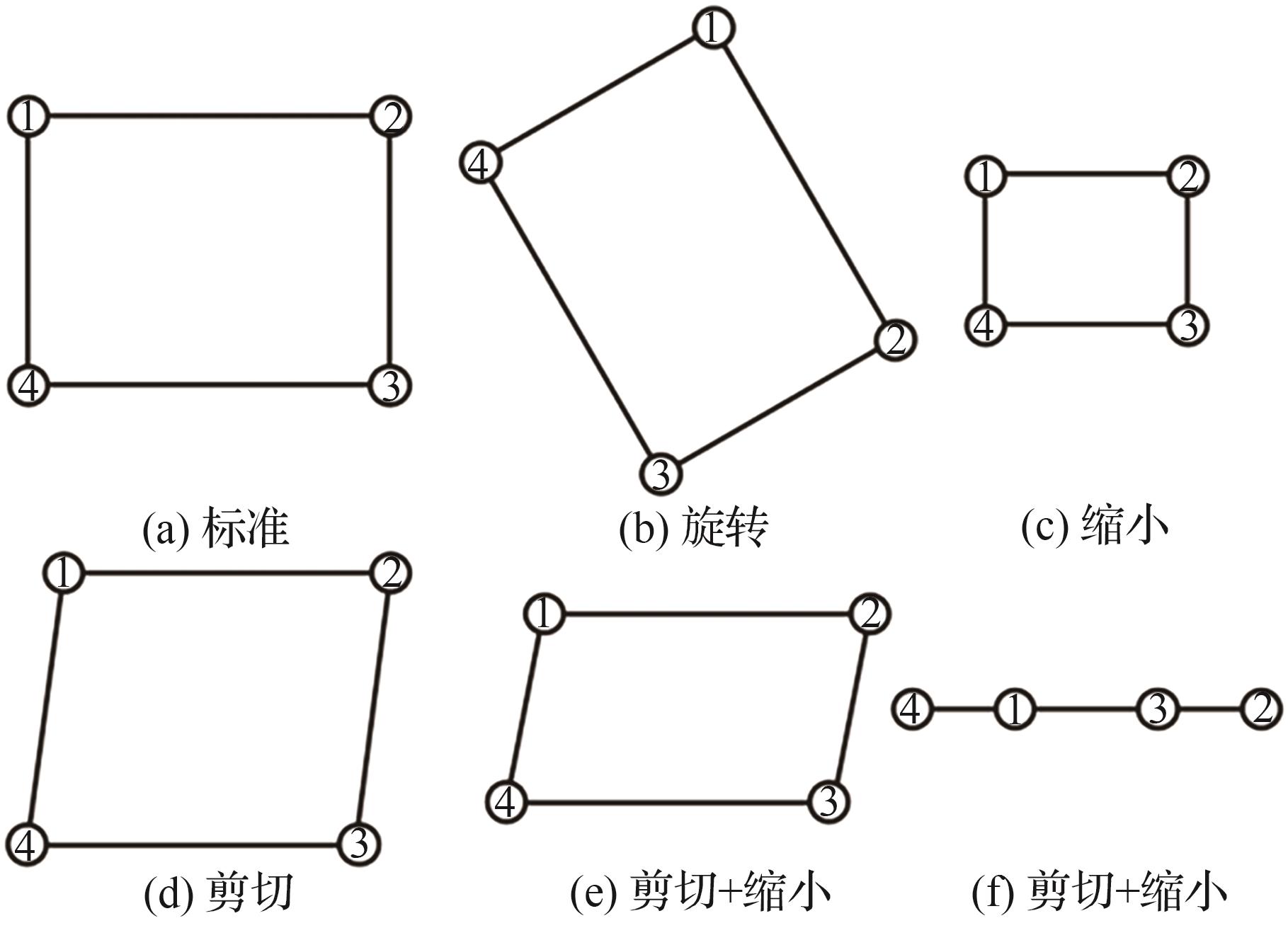
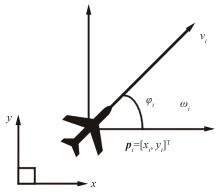
Fig.3
Two-dimensional unicycle model of fixed-wing UAV
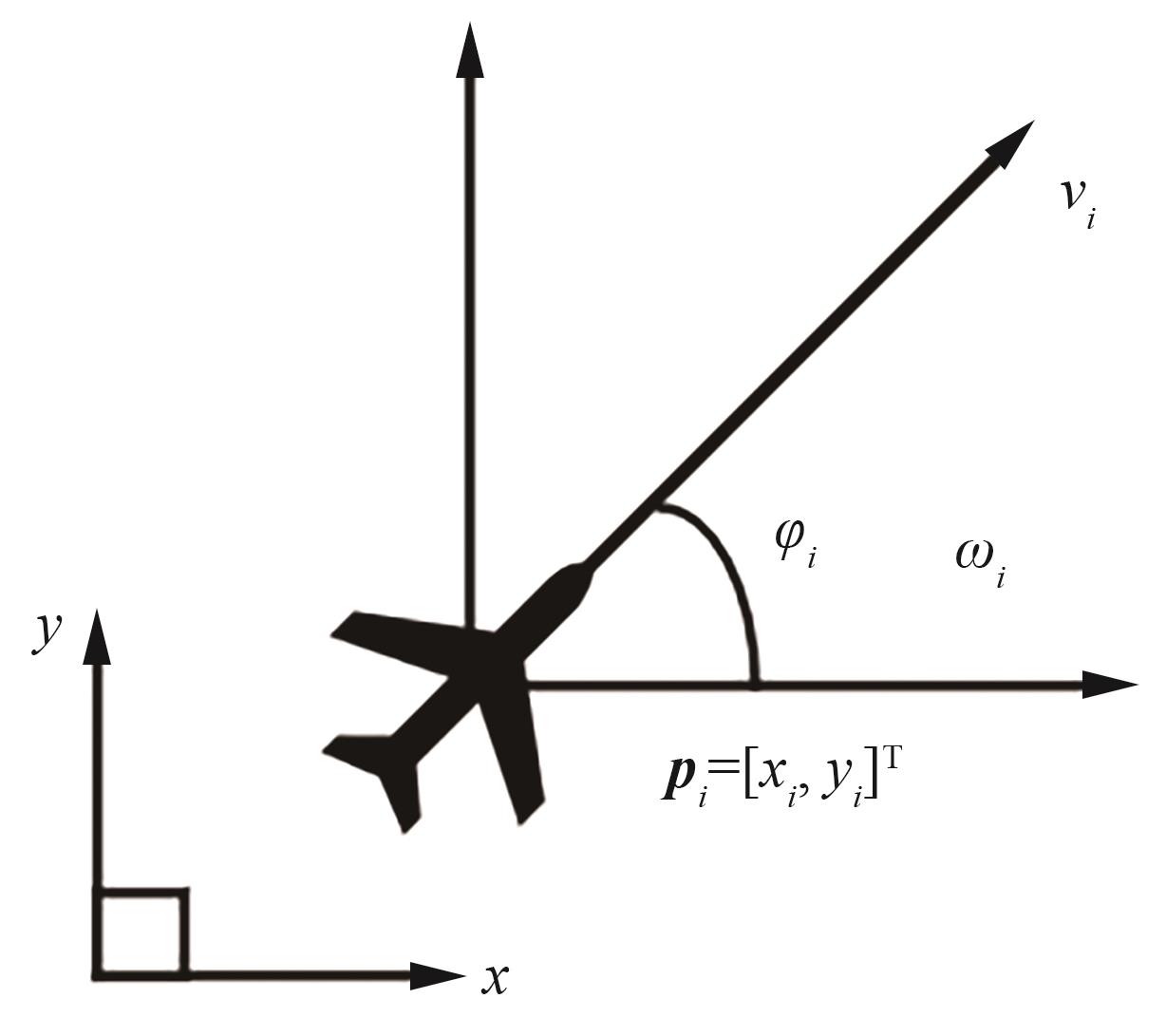
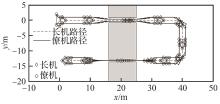
Fig.4
Description of affine formation flight scenario
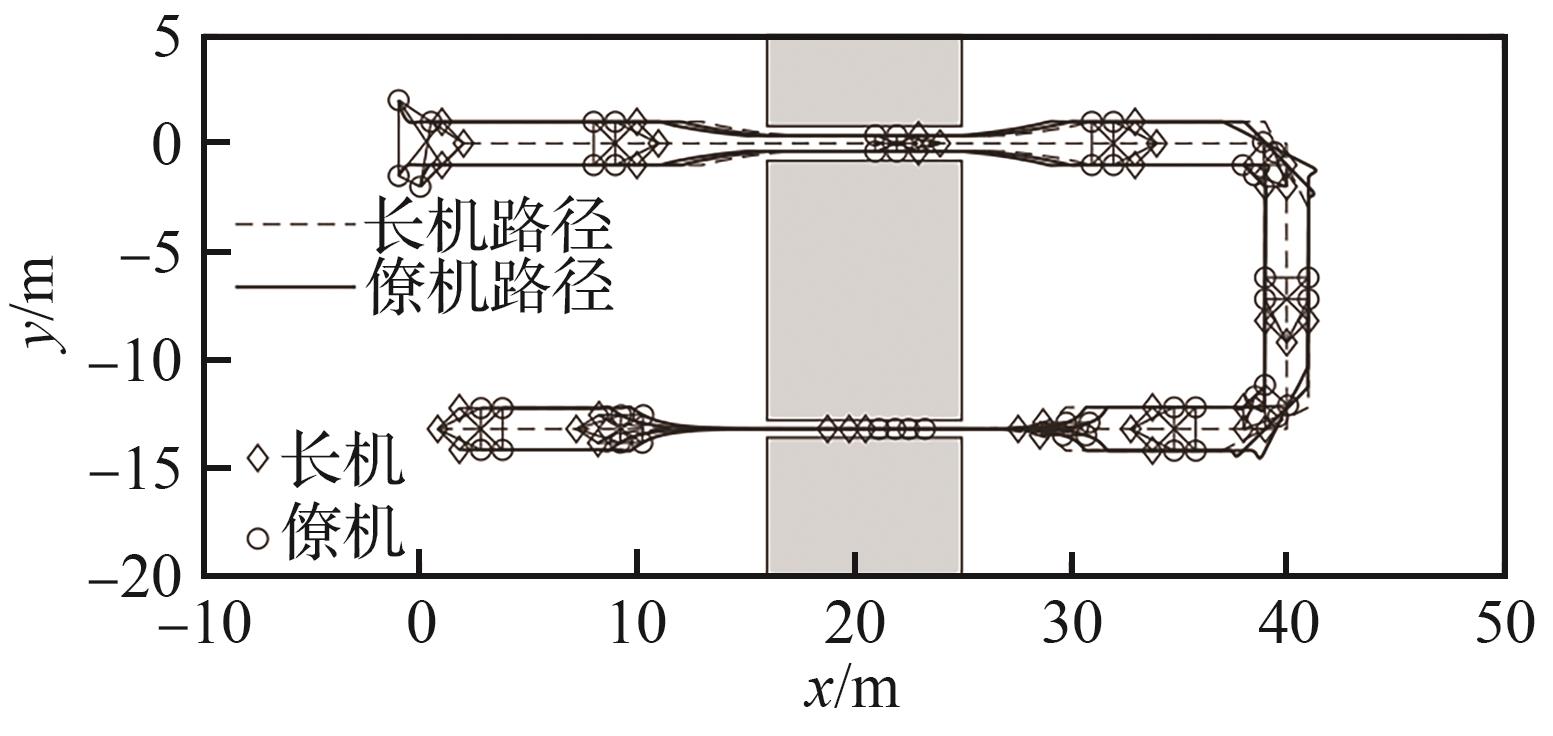
Fig.5
Hierarchical control scheme for affine formation of fixed-wing UAV swarms
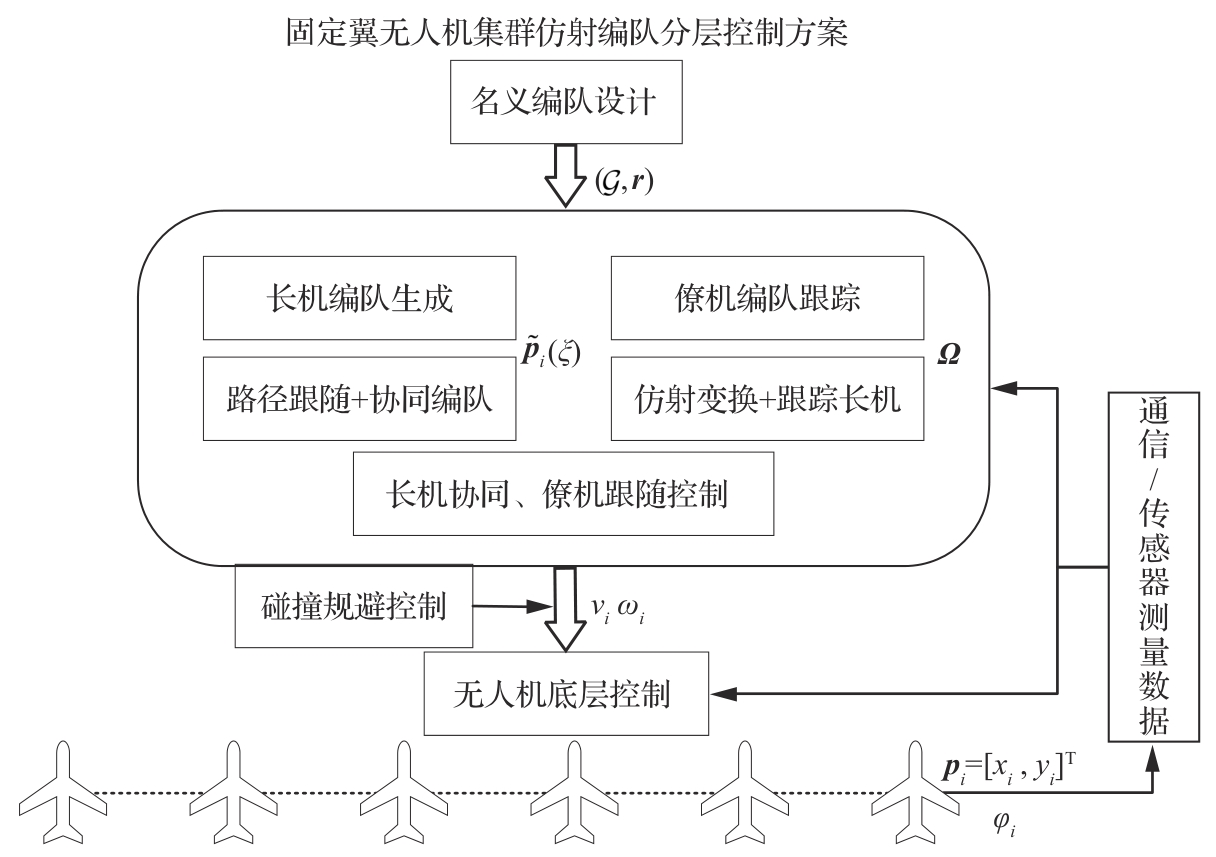
Fig.6
Schematic diagram of single-aircraft path following
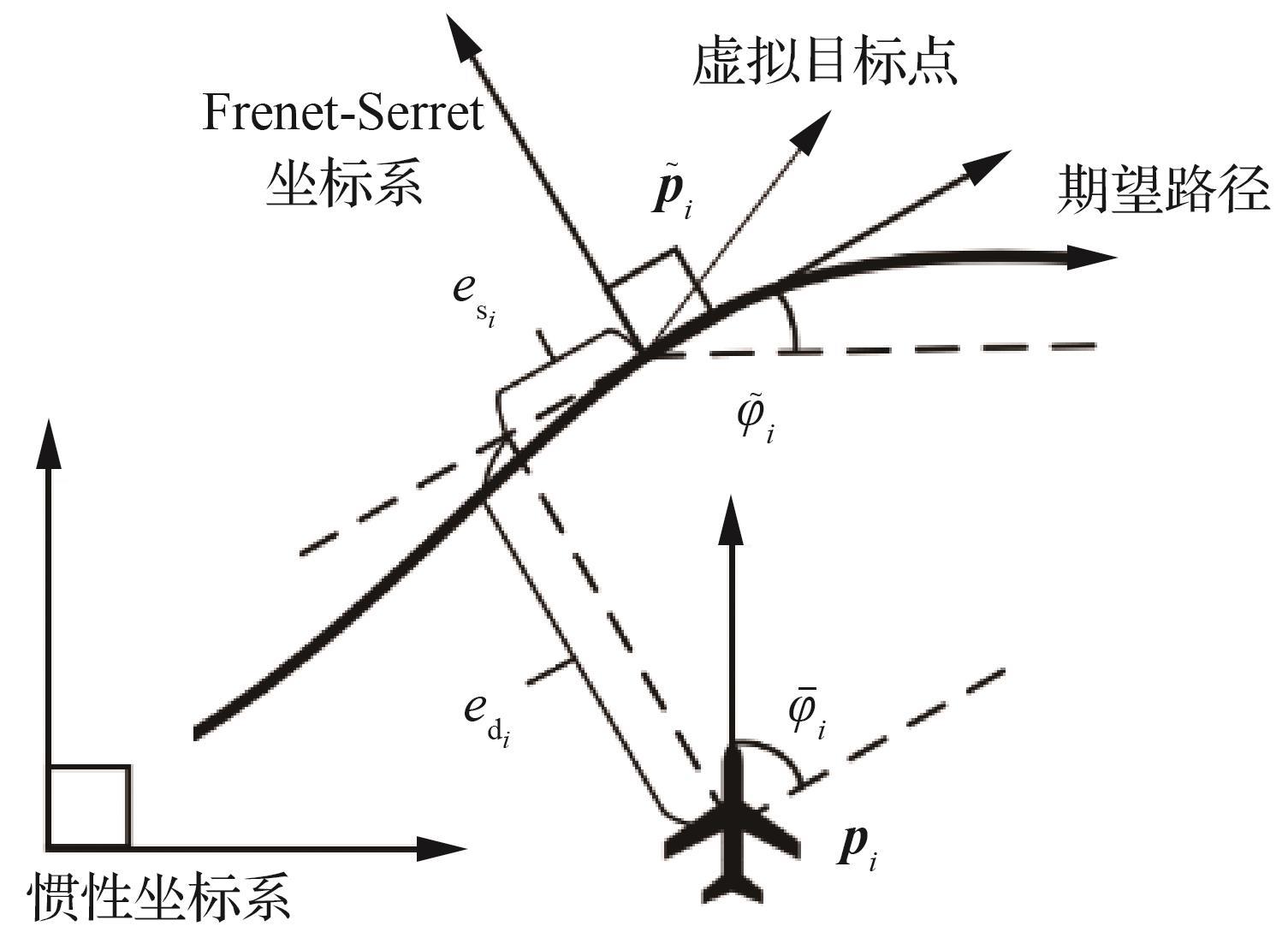
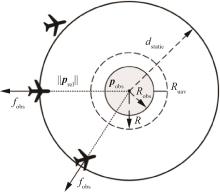
Fig.7
Schematic diagram of obstacle avoidance
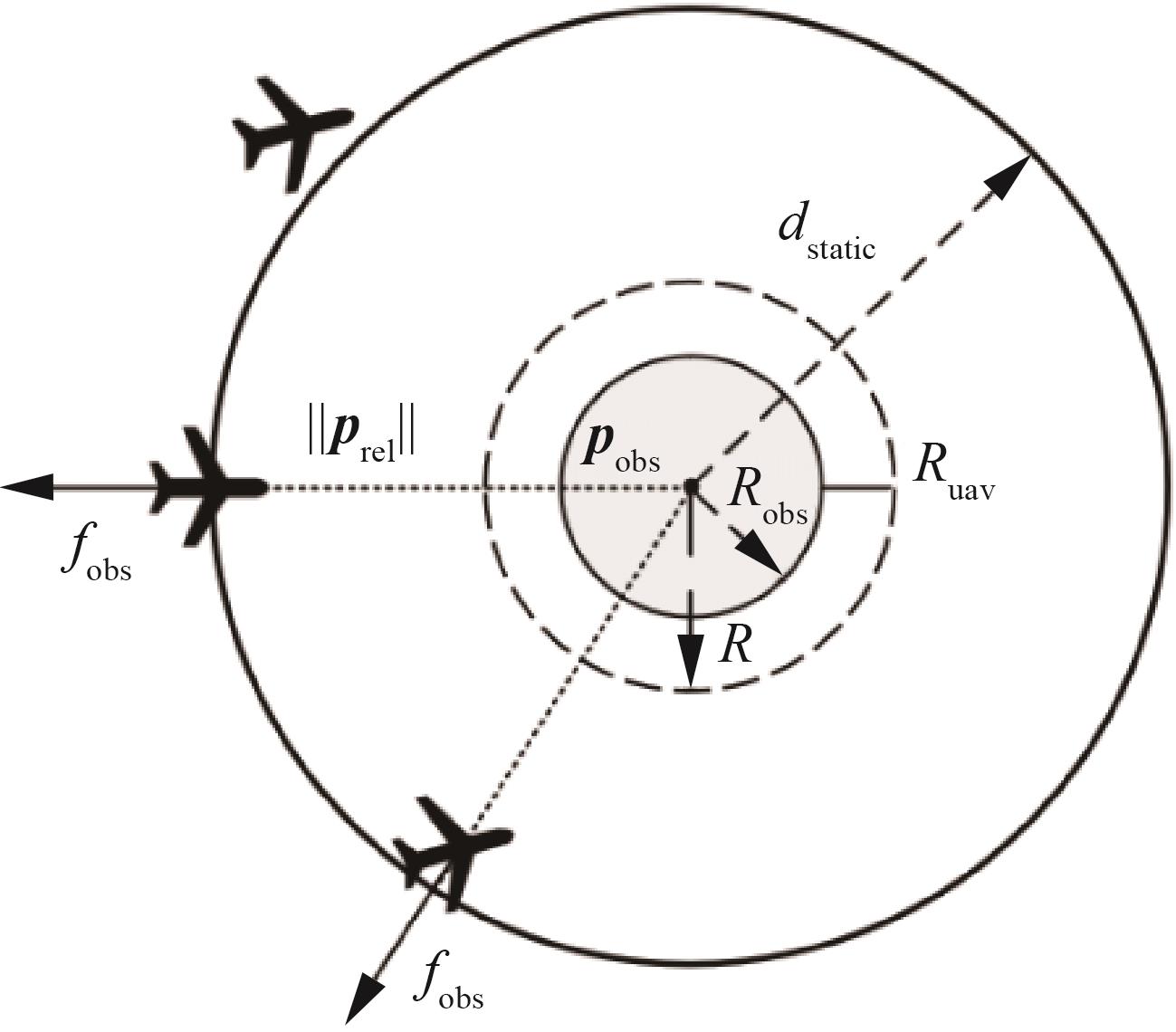

Fig.8
Collision avoidance schematic diagram
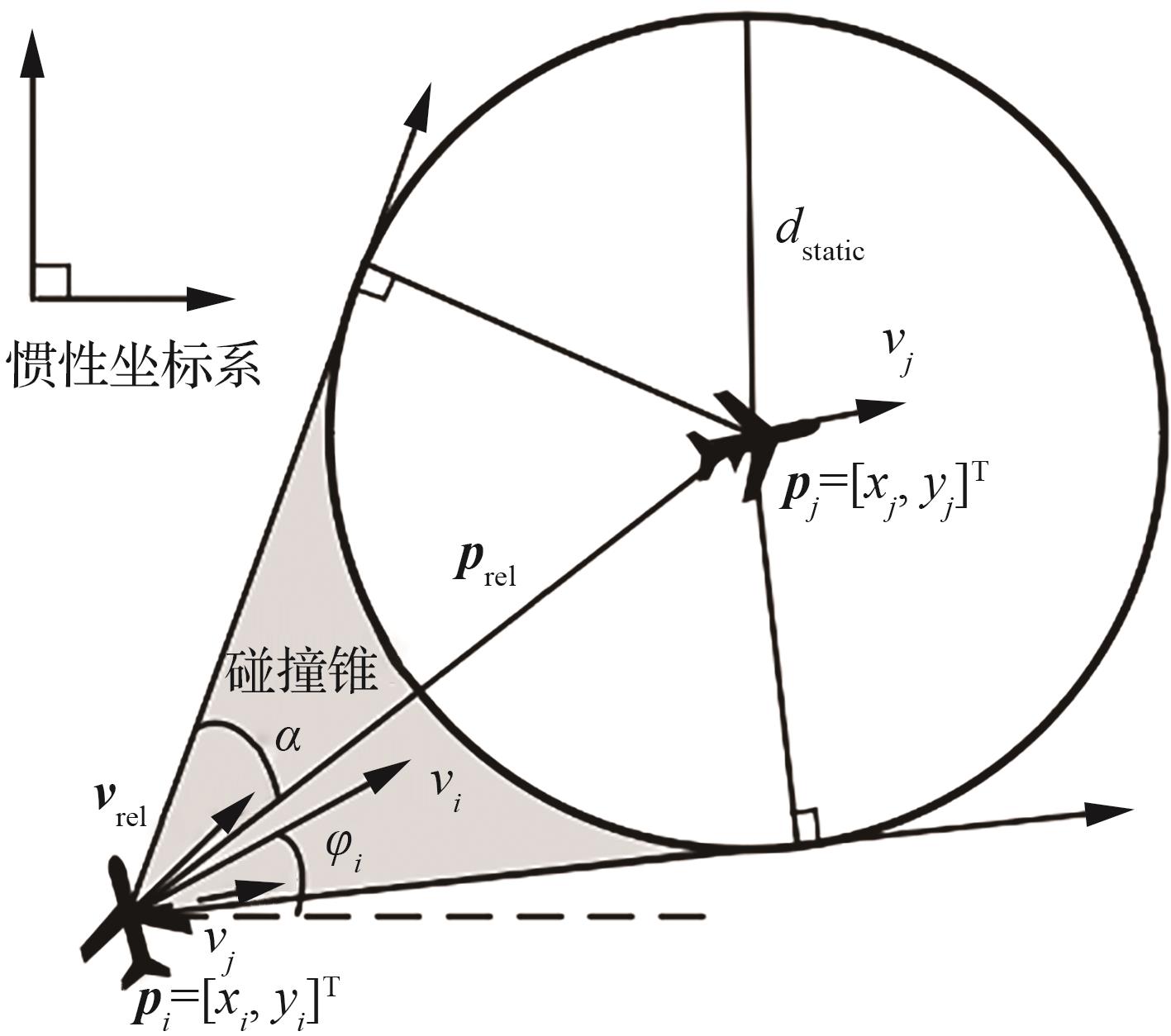
Fig.9
Nominal configuration of six fixed-wing UAVs
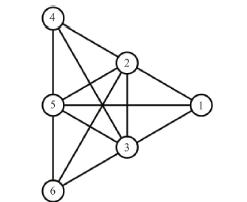
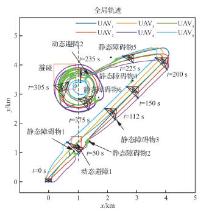
Fig.10
Comprehensive simulation results of affine formation control for fixed-wing UAV swarms
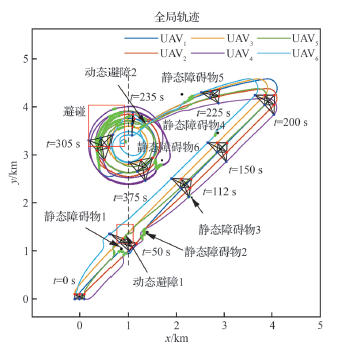

Fig.11
Collision avoidance situation
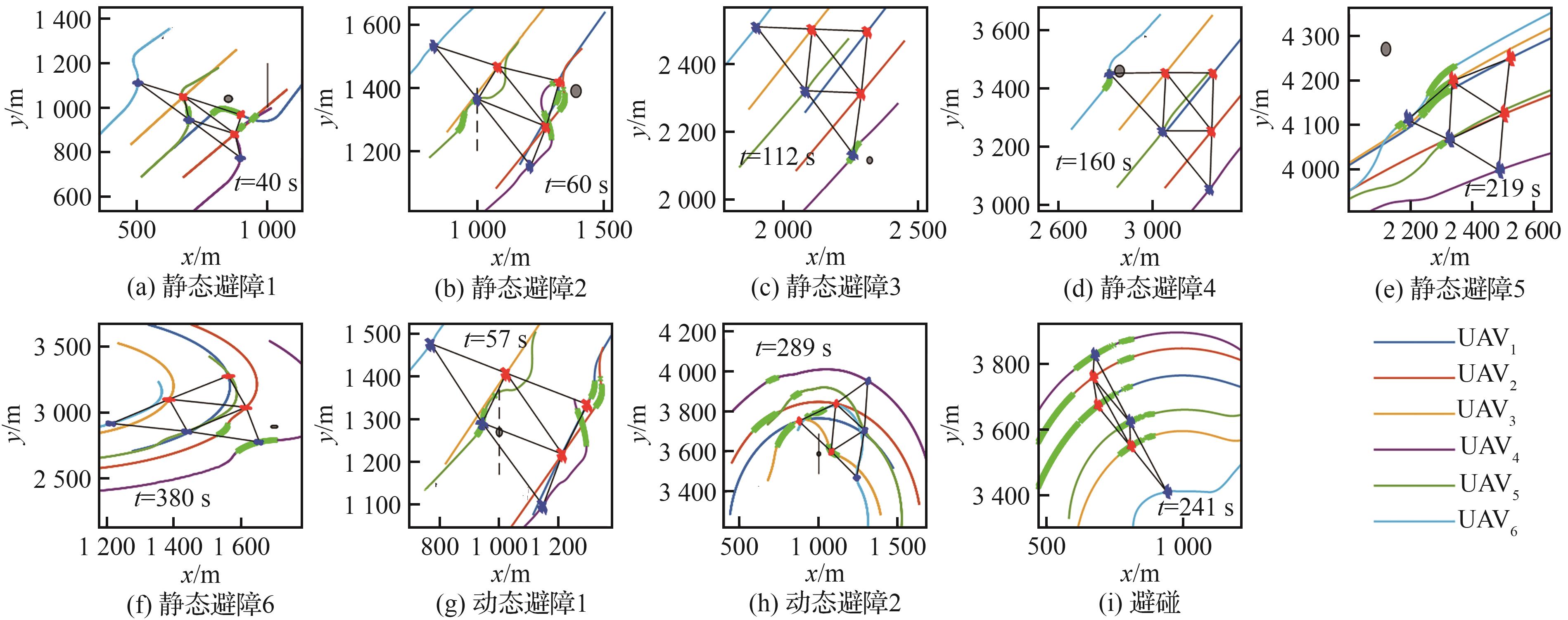
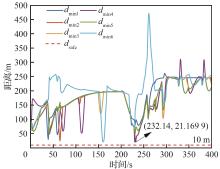
Fig.12
dmin change curves
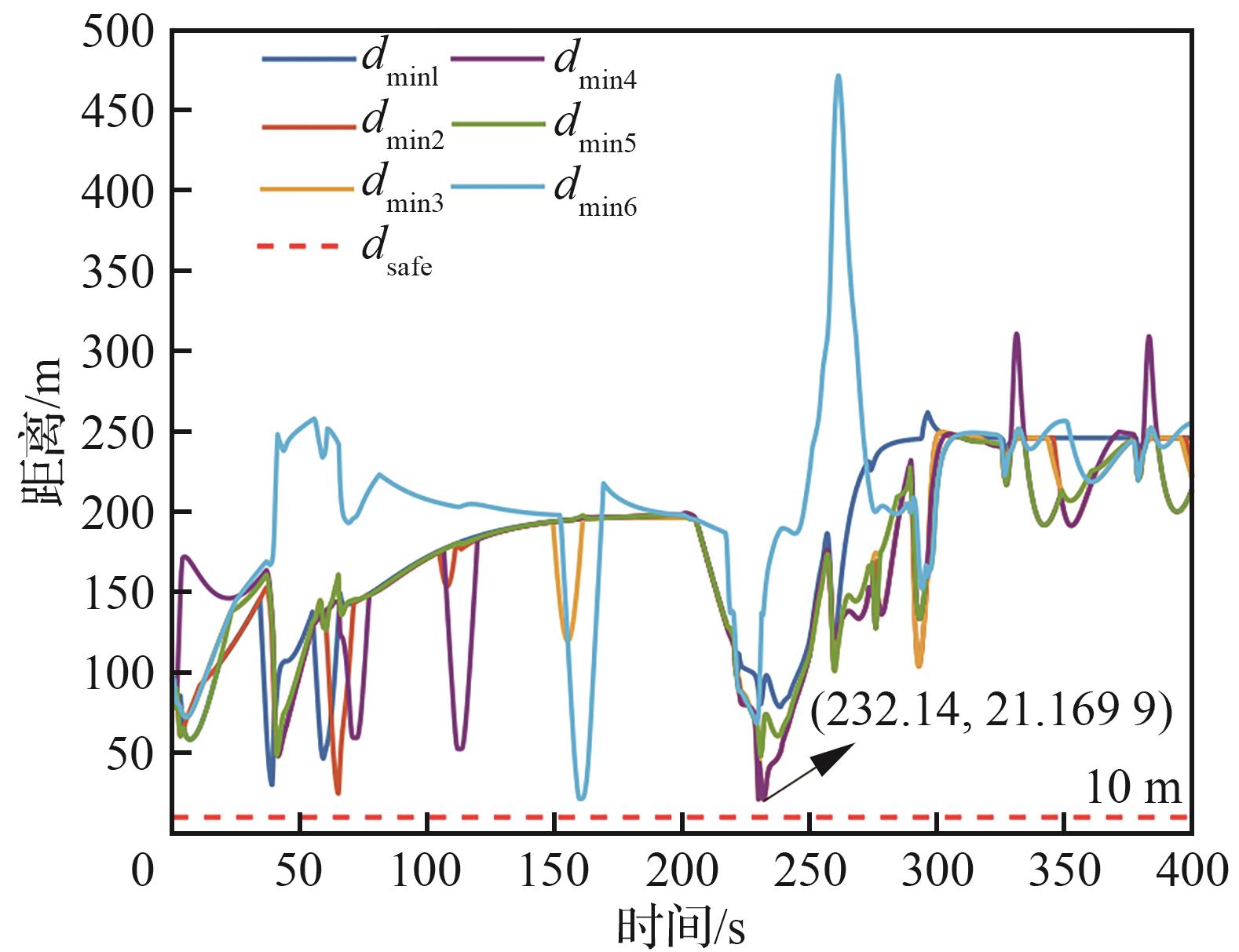

Fig.13
Error change curves
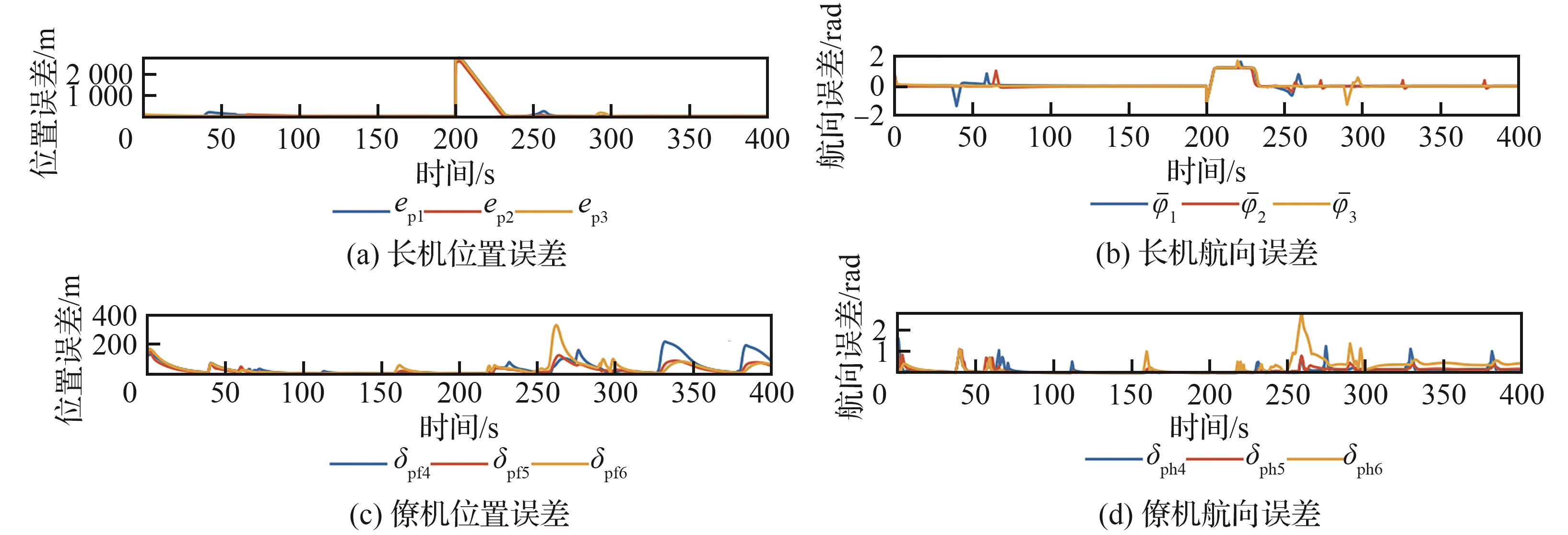

Fig.14
Record of affine transformation process
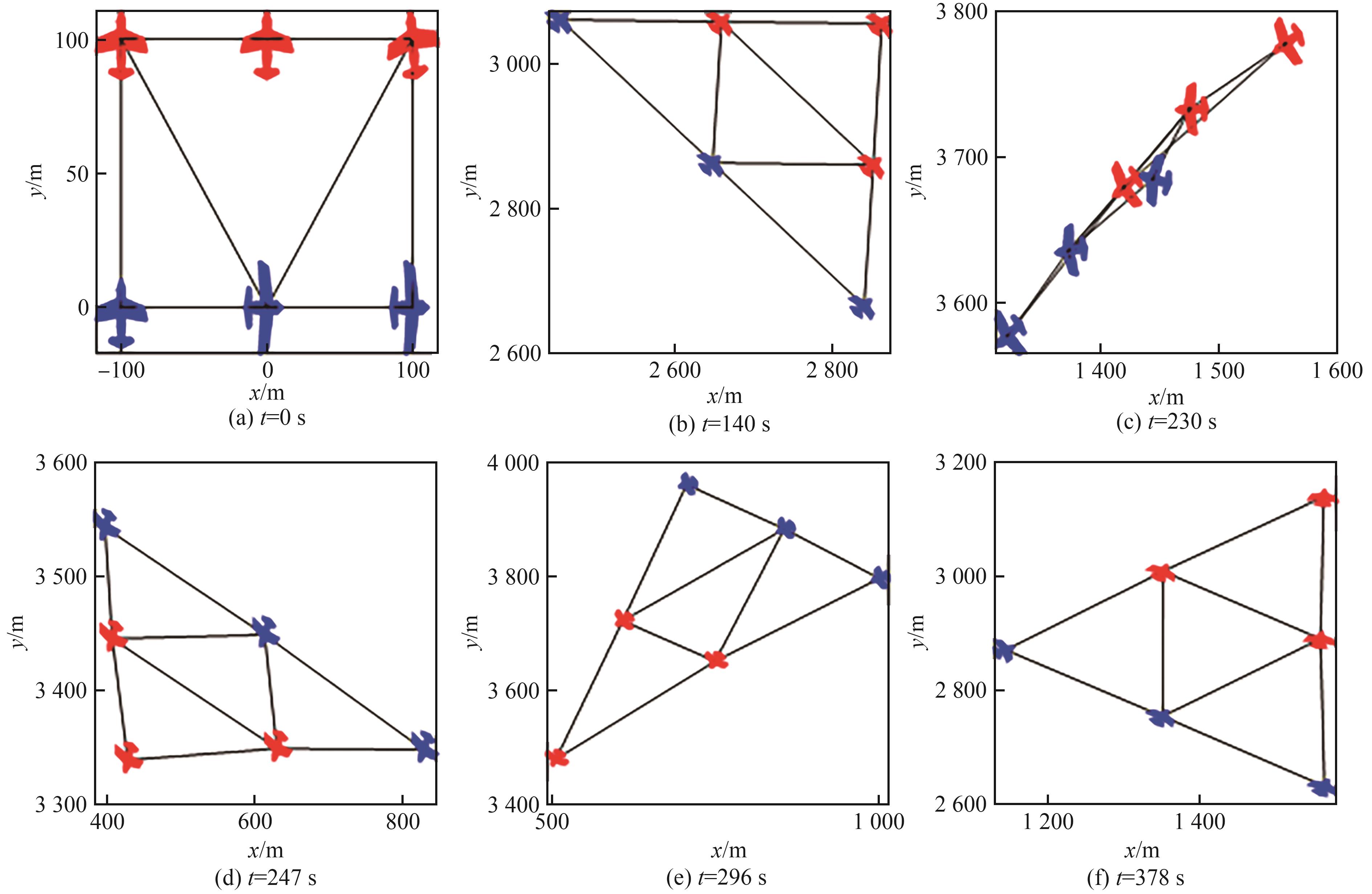
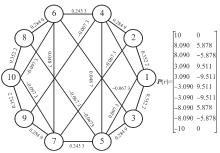
Fig.15
Nominal configuration of 10 fixed-wing UAVs
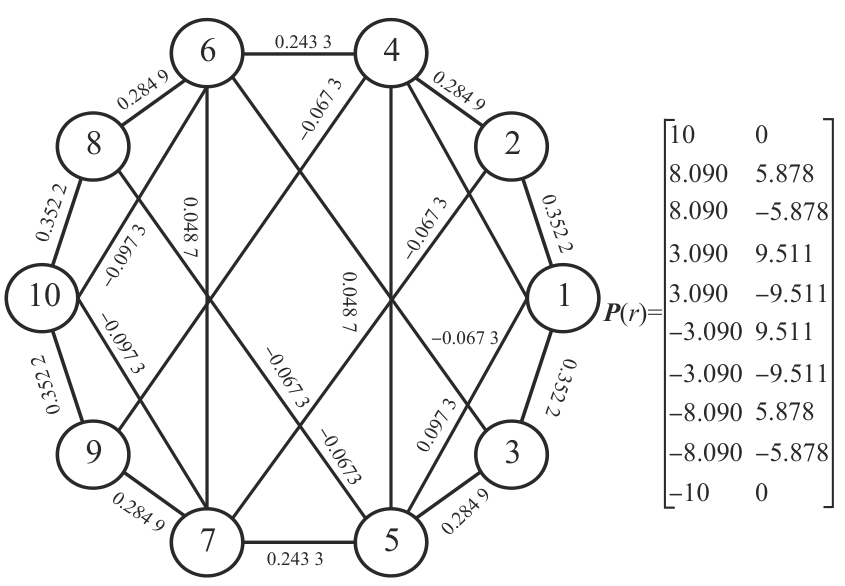
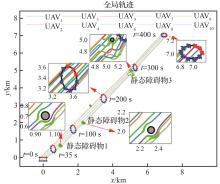
Fig.16
Movement trajectories of 10 UAVs
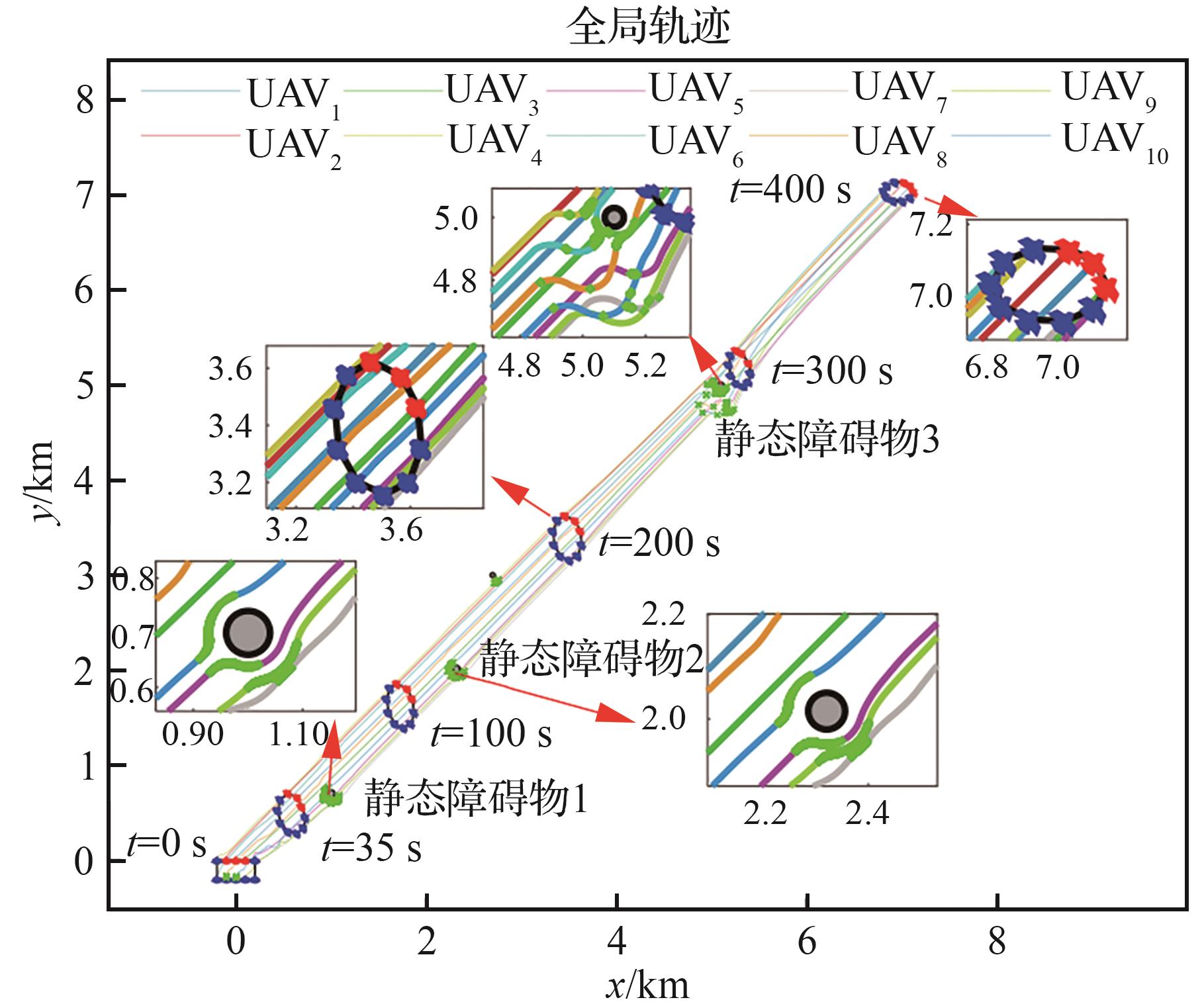
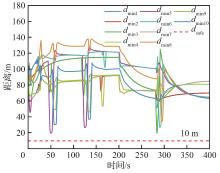
Fig.17
dmin curves of 10 UAVs
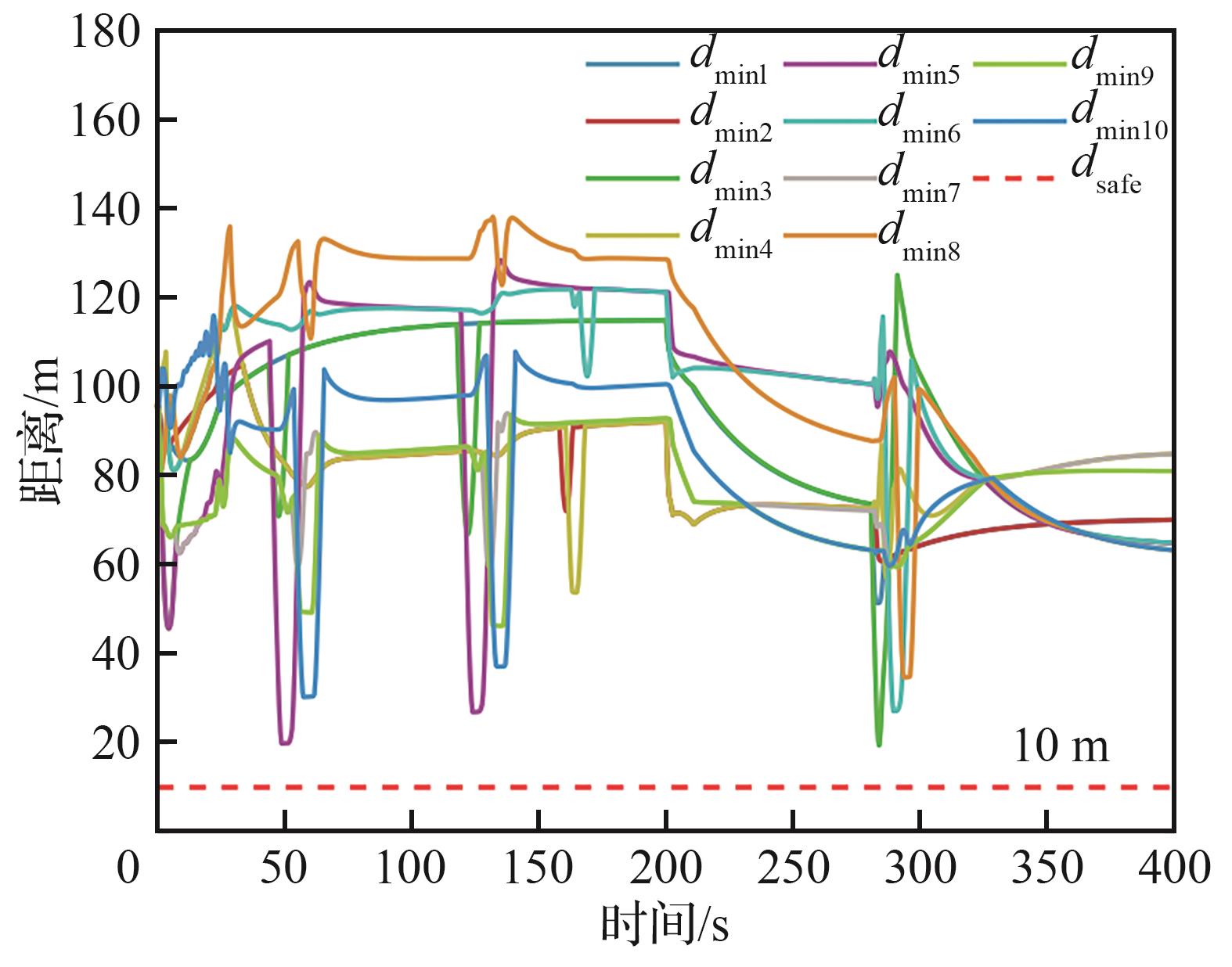

Fig.18
Error change curves in 10-UAVs simulation
Fig.19
Position error change curves of followers in 10-UAVs simulation
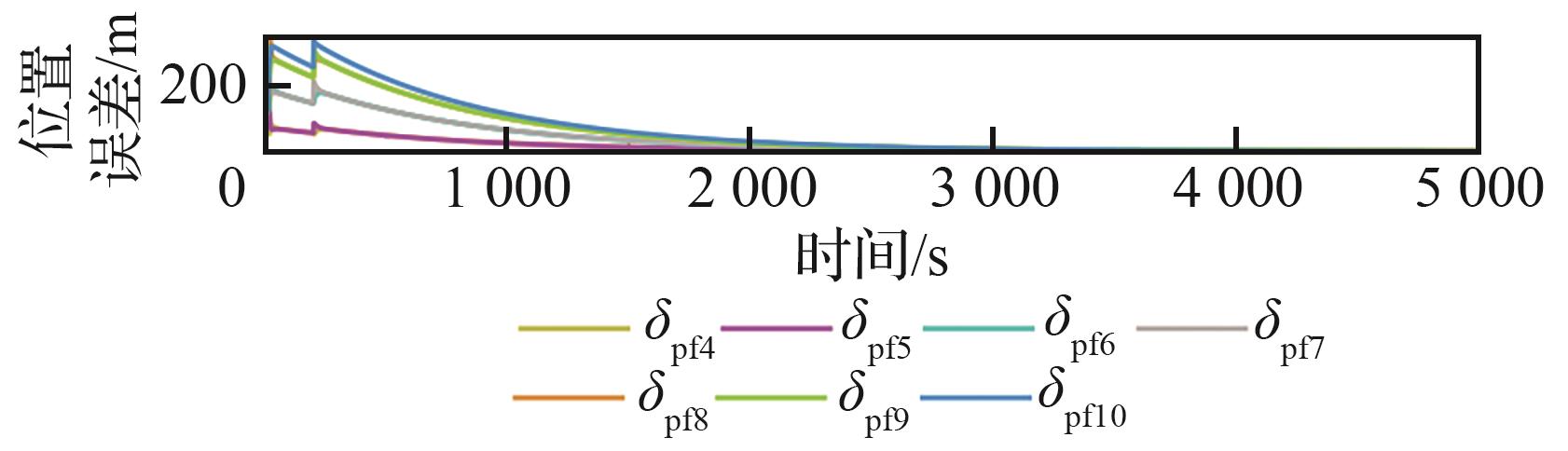
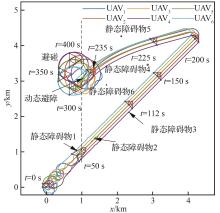
Fig.20
Global movement trajectories of comparison simulation
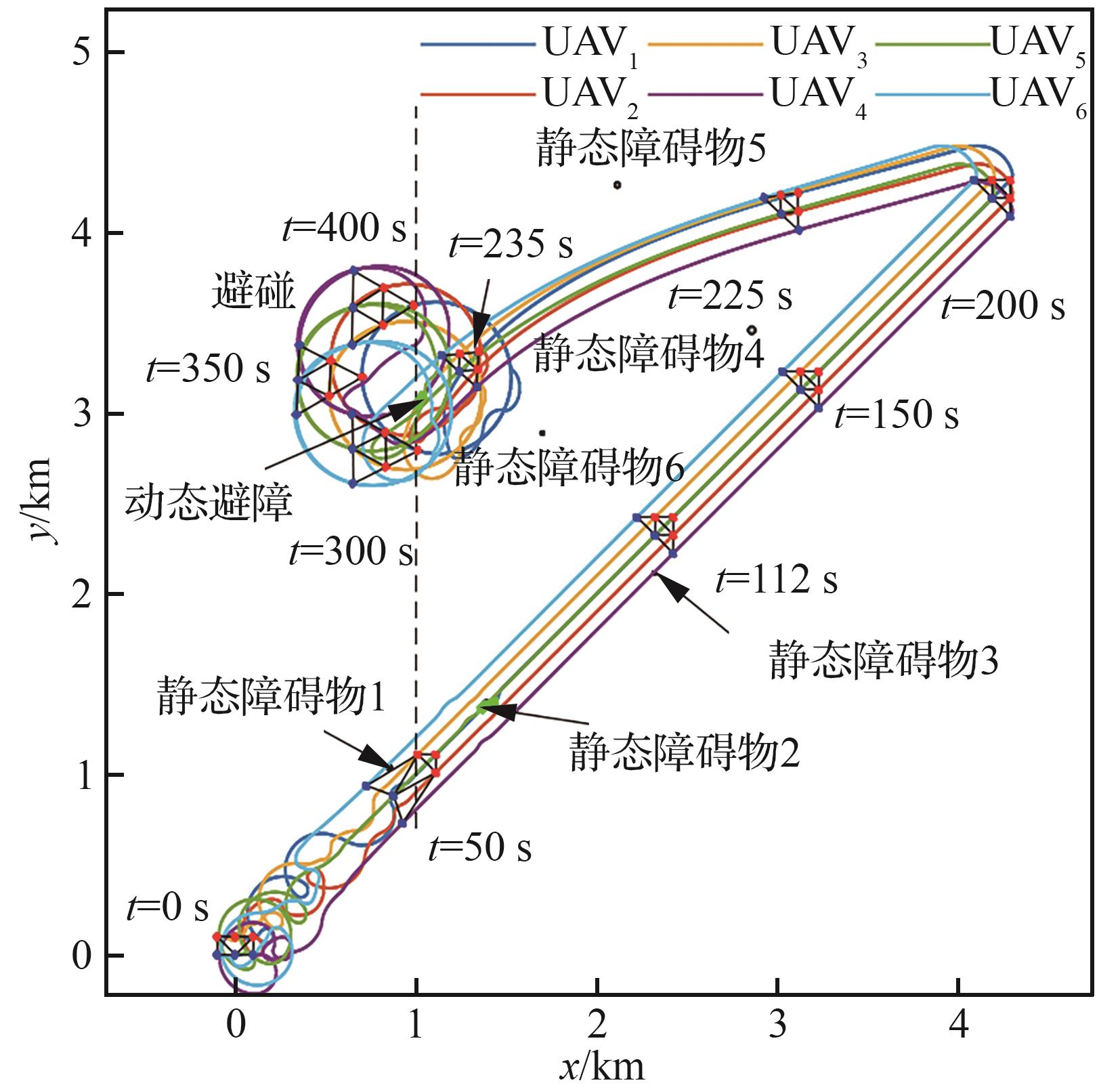

Fig.21
Obstacle avoidance situations of comparison simulation
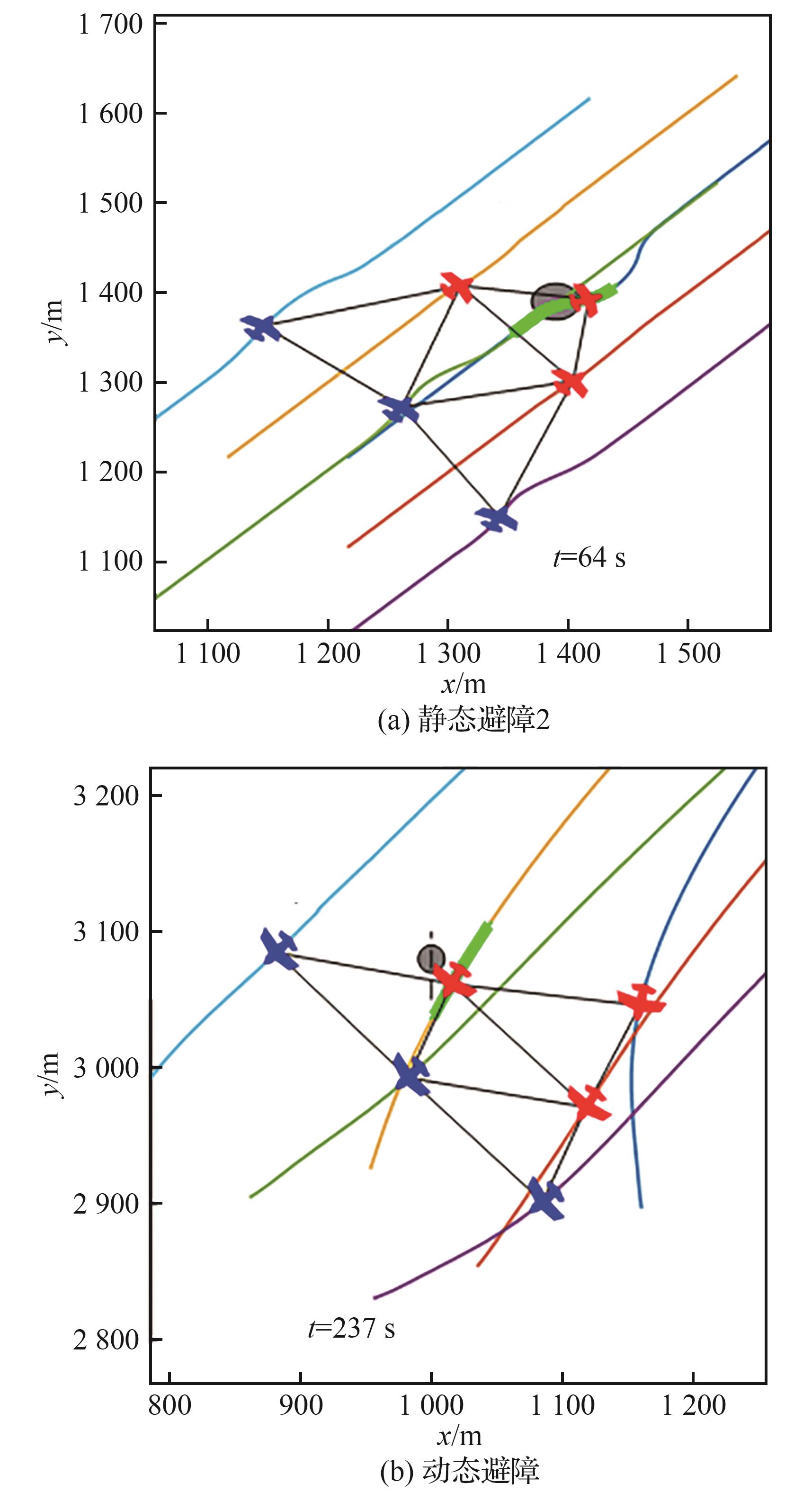
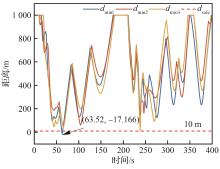
Fig.22
dmin curves of comparison simulation
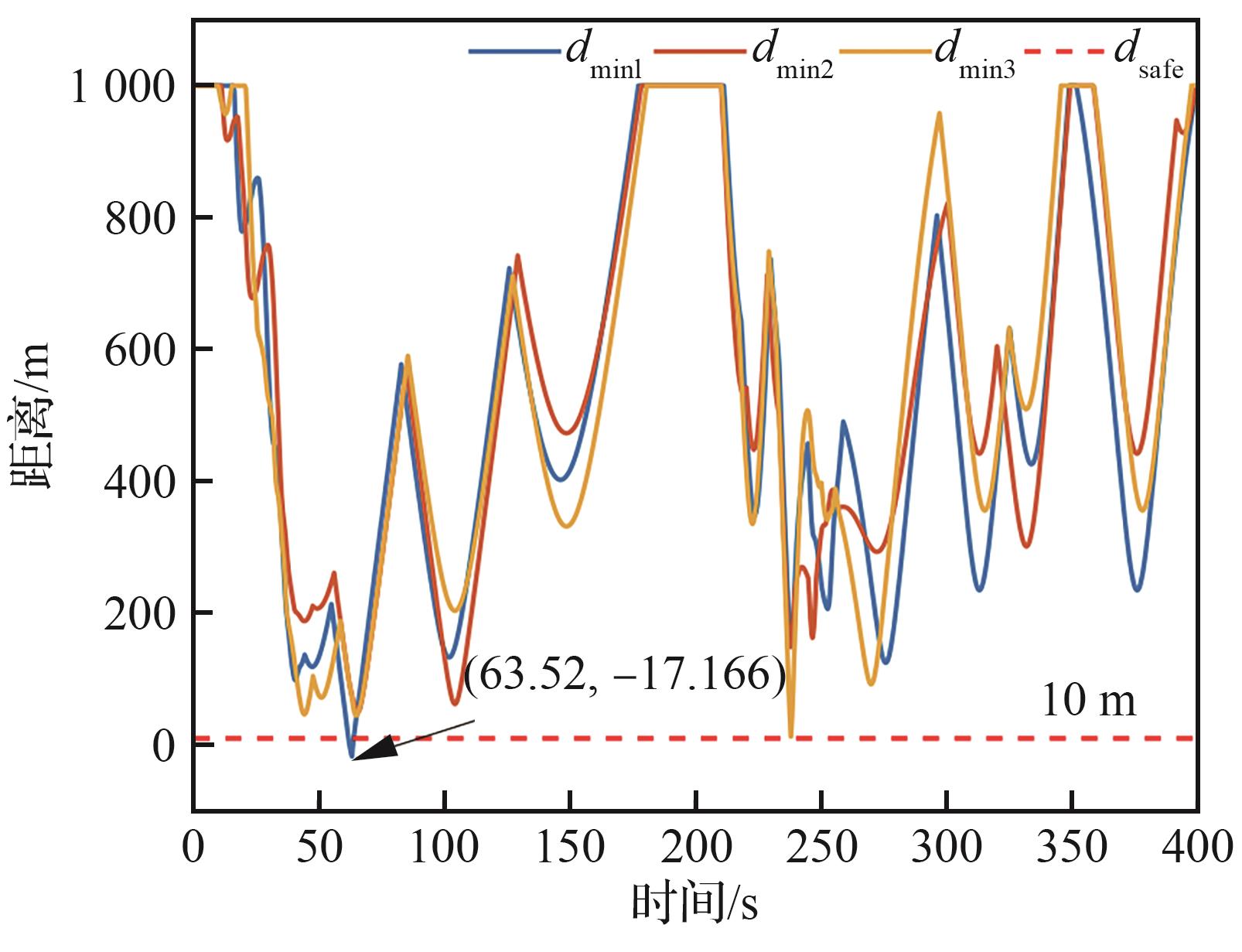
Fig.23
Follower tracking error of comparison simulation
Table 1
Software-in-loop simulation experiment environment configuration
| 名称 | 配置信息 |
|---|---|
| 操作系统 | Ubuntu 20.04 |
| 开发语言 | Python 3.8.0 + C++ |
| 框架 | ROS + Gazebo 11 + px4 1.13 |
| CPU | Intel(R) Core (TM) i7-14700HX |
| GPU | NVIDIA GeForce RTX 4070 |
| 内存 | 16 GB |
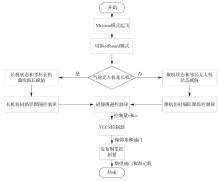
Fig.24
Formation control task execution logic
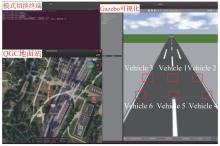
Fig.25
Six-UAVs startup scenario in XTDrone simulation

Fig.26
Flight situation of swarm formation in XTDrone simulation
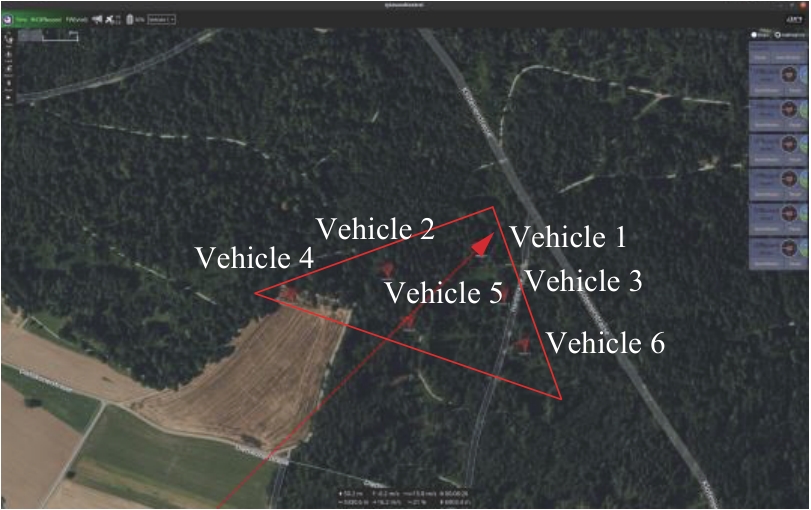
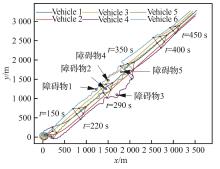
Fig.27
Swarm flight path in complex environment in XTDrone simulation
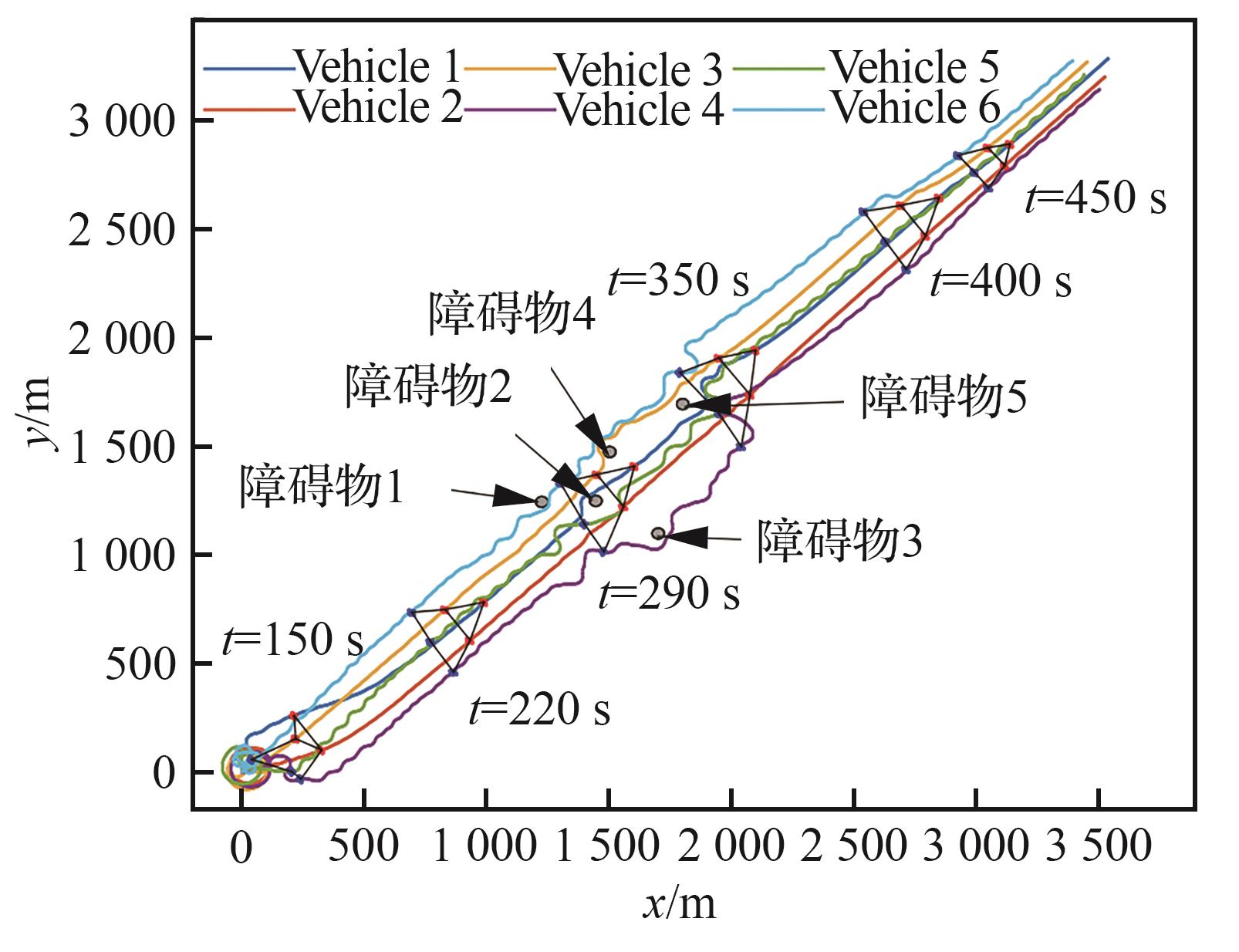

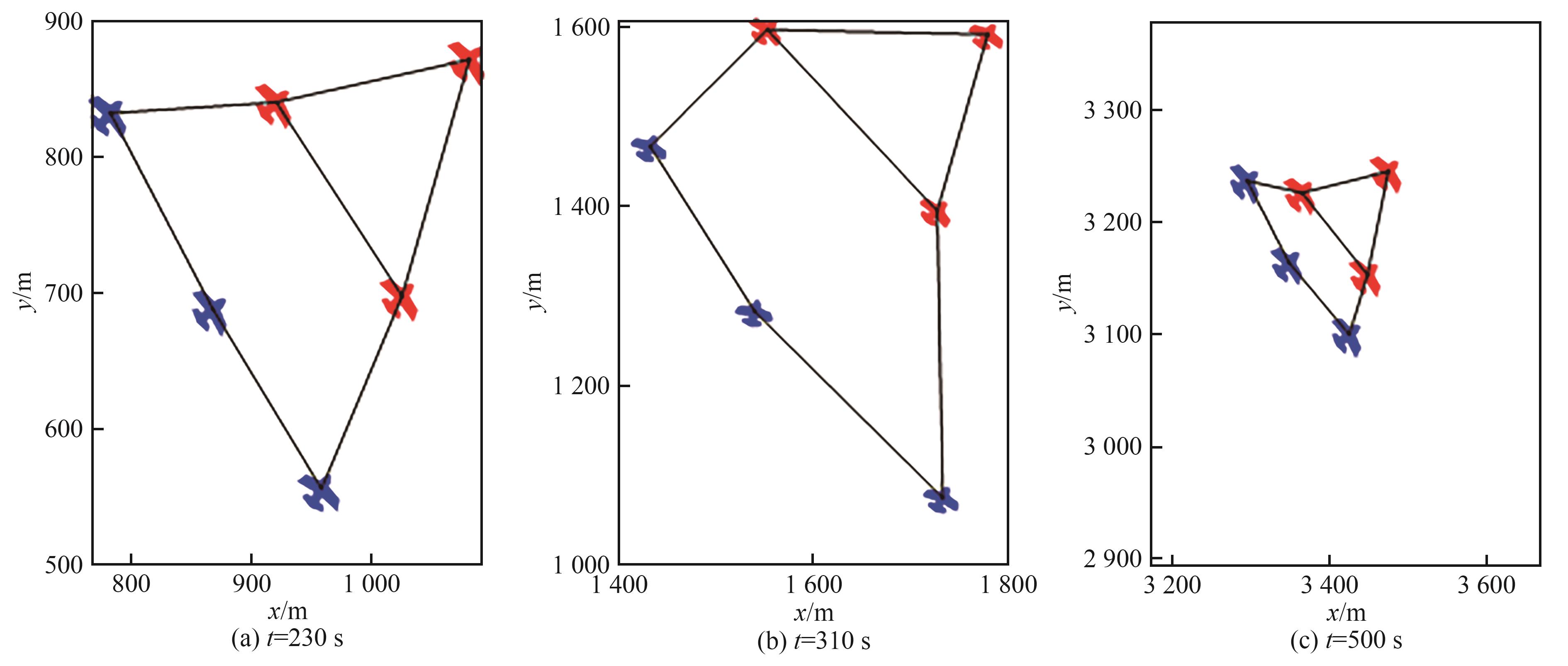
Fig.28
Affine transformation in XTDrone simulation
| [1] | 武晓龙, 王茜, 焦晓静. 美国小型无人机集群发展分析[J]. 飞航导弹, 2018(2): 31-37. |
| WU X L, WANG Q, JIAO X J. Analysis on the development of small UAV cluster in the United States[J]. Aerodynamic Missile Journal, 2018(2): 31-37 (in Chinese). | |
| [2] | ZHAO W, YU W W, ZHANG H P. Observer-based formation tracking control for leader-follower multi-agent systems[J]. IET Control Theory Applications, 2019, 13(2): 239-247. |
| [3] | BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE Transactions on Robotics and Automation, 1998, 14(6): 926-939. |
| [4] | LEWIS M A, TAN K H. High precision formation control of mobile robots using virtual structures[J]. Autonomous Robots, 1997, 4(4): 387-403. |
| [5] | LI Y, CHAI L N, WU C. Multi-robot formation obstacle avoidance based on virtual robots and improved artificial potential fields[C]∥2024 China Automation Congress (CAC). Piscataway: IEEE Press, 2025: 1861-1866. |
| [6] | JAMSHIDI M, GOMEZ J, JAIMES A S. Intelligent control of UAVs for consensus-based and network controlled applications[J]. Applied Computational Mathematics, 2011, 10(1): 35-64. |
| [7] | ZHAO S Y. Affine formation maneuver control of multiagent systems[J]. IEEE Transactions on Automatic Control, 2018, 63(12): 4140-4155. |
| [8] | LIN Z Y, WANG L L, CHEN Z Y, et al. Necessary and sufficient graphical conditions for affine formation control[J]. IEEE Transactions on Automatic Control, 2016, 61(10): 2877-2891. |
| [9] | XU Y, ZHAO S Y, LUO D L, et al. Affine formation maneuver control of high-order multi-agent systems over directed networks[J]. Automatica, 2020, 118: 109004. |
| [10] | WANG J N, DING X J, WANG C Y, et al. Affine formation control of general linear multi-agent systems with delays[J]. Unmanned Systems, 2023, 11(2): 123-132. |
| [11] | 陈浩. 复杂条件下固定翼无人机集群编队控制研究[D]. 长沙: 国防科技大学, 2020: 79-88. |
| CHEN H. Research on formation control of fixed-wing UAV swarms in complex enivronments[D]. Changsha: National University of Defense Technology, 2020: 79-88 (in Chinese). | |
| [12] | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732. |
| WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732 (in Chinese). | |
| [13] | CHEN L M, MEI J, LI C J, et al. Distributed leader-follower affine formation maneuver control for high-order multiagent systems[J]. IEEE Transactions on Automatic Control, 2020, 65(11): 4941-4948. |
| [14] | SU P Y, SHI Z X, YU J L, et al. Distributed time-varying optimization-based protocols for affine formation maneuver[J]. IEEE Transactions on Industrial Electronics, 2025, 72(8): 8503-8511. |
| [15] | XU Y, ZHENG W M, LUO D L, et al. Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1269-1285. |
| [16] | 李慧铭. 领航跟随模式固定翼无人机集群仿射编队控制[D]. 长沙: 国防科技大学, 2020: 29-64. |
| LI H M. Affine formation control of multiple fixed-wing UAV swarms based on leader-follower method[D]. Changsha: National University of Defense Technology, 2020: 29-64 (in Chinese). | |
| [17] | BEARD R W, MCLAIN T W. Small unmanned aircraft[M]. Princeton: Princeton University Press, 2012: 22-30. |
| [18] | SUJIT P B, SARIPALLI S, SOUSA J B. Unmanned aerial vehicle path following: A survey and analysis of algorithms for fixed-wing unmanned aerial vehicless[J]. IEEE Control Systems Magazine, 2014, 34(1): 42-59. |
| [19] | BEARD R W, FERRIN J, HUMPHERYS J. Fixed wing UAV path following in wind with input constraints[J]. IEEE Transactions on Control Systems Technology, 2014, 22(6): 2103-2117. |
| [20] | WANG Y Z, SHAN M, WANG D W. Motion capability analysis for multiple fixed-wing UAV formations with speed and heading rate constraints[J]. IEEE Transactions on Control of Network Systems, 2020, 7(2): 977-989. |
| [21] | CHEN H, CONG Y R, WANG X K, et al. Coordinated path-following control of fixed-wing unmanned aerial vehicles[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(4): 2540-2554. |
| [22] | ZHAO S L, WANG X K, LIN Z Y, et al. Integrating vector field approach and input-to-state stability curved path following for unmanned aerial vehicles[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(8): 2897-2904. |
| [23] | HE X D, LI Z K, WANG X K, et al. Roto-translation invariant formation of fixed-wing UAVs in 3D: Feasibility and control[J]. Automatica, 2024, 161: 111492. |
| [24] | FIORINI P, SHILLER Z. Motion planning in dynamic environments using velocity obstacles[J]. The International Journal of Robotics Research, 1998, 17(7): 760-772. |
| [25] | 王亚静. 复杂环境下固定翼无人机集群分布式规避控制研究[D]. 长沙: 国防科技大学, 2018: 31-36. |
| WANG Y J. Distributed collision avoidance control for fixed-wing UAV swarms in cluttered environment[D]. Changsha: National University of Defense Technology, 2018: 31-36 (in Chinese). | |
| [26] | XTDrone[CP/OL][2025-06-30]. . |
| [27] | LIU Y F, LIU J J, HE Z P, et al. A survey of multi-agent systems on distributed formation control[J]. Unmanned Systems, 2024, 12(5): 913-926. |
| [1] | Wenyu ZHOU, Yingjie WANG, Chenhao OUYANG, Zixuan ZHENG, Xiaokui YUE. Bearing-based collision-avoidance formation control of quadrotor UAVs under internal and external disturbances [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 533224-533224. |
| [2] | Kang ZHANG, Xinmin TANG, Junwei GU. Risk-aware autonomous avoidance for eVTOL [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(2): 332083-332083. |
| [3] | Chao YAN, Zexu ZHANG, Hutao CUI, Kai ZHANG, Jingzong LIU. Predefined-time affine formation maneuvering control for fixed-wing UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331824-331824. |
| [4] | Jianye SUN, Dong YE, Yan XIAO. Active observation trajectory planning for non-cooperative spacecraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331587-331587. |
| [5] | Shasha YU, Xingyu CHEN. Key technological innovations and challenges in urban air mobility [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730657-730657. |
| [6] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [7] | Xin HE, Zongying SHI, Yisheng ZHONG. Multi⁃USV cooperative collision avoidance based on velocity obstacle [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729758-729758. |
| [8] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [9] | HU Yangxiu, ZHAO Changchun, JIA Chenglong, QIAN Zhouyuan, HU Tao. Synchronous path formation control of UAV swarm based on robot operating system (ROS) [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726914-726914. |
| [10] | YU Jianglong, DONG Xiwang, LI Qingdong, LYU Jinhu, REN Zhang. Distributed cooperative encirclement hunting guidance method for intercepting maneuvering target [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325817-325817. |
| [11] | DONG Wenqi, HE Feng. Hierarchical and distributed generation of information interaction topology for large scale UAV formation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 324380-324380. |
| [12] | LI Guofei, ZHU Guoliang, LYU Jinhu, LIU Kexin, WU Chunfeng. Three-dimensional distributed cooperative guidance law for multiple leader-follower flight vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524926-524926. |
| [13] | LI Anti, LI Chenglong, WU Dingjie, WEI Peng. Collision avoidance decision method for UAVs in random search combined with jump point guidance [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(8): 323726-323726. |
| [14] | ZHANG Pu, XUE Huifeng, GAO Shan. Distributed adaptive fault-tolerance consensus control for multi-agent system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(3): 323539-323539. |
| [15] | WAN Wenya, SUN Chong, YUAN Jianping. Multi-finger caging-based gripping path design for space non-cooperative targets [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(12): 324041-324041. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341