ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (7): 327100-327100.doi: 10.7527/S1000-6893.2022.27100
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Heye XIAO1, Jianfeng YANG2, Junqiang BAI1( ), Xudong ZHANG3, Lirong WU3
), Xudong ZHANG3, Lirong WU3
Received:2022-03-04
Revised:2022-03-16
Accepted:2022-06-23
Online:2023-04-15
Published:2022-07-08
Contact:
Junqiang BAI
E-mail:Junqiang@nwpu.edu.cn
Supported by:CLC Number:
Heye XIAO, Jianfeng YANG, Junqiang BAI, Xudong ZHANG, Lirong WU. Modular UAVs configuration method responded to task requirements[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327100-327100.
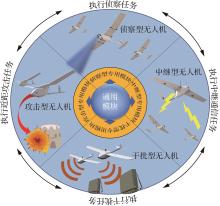
Fig. 1
Basic idea of modular UAV configuration
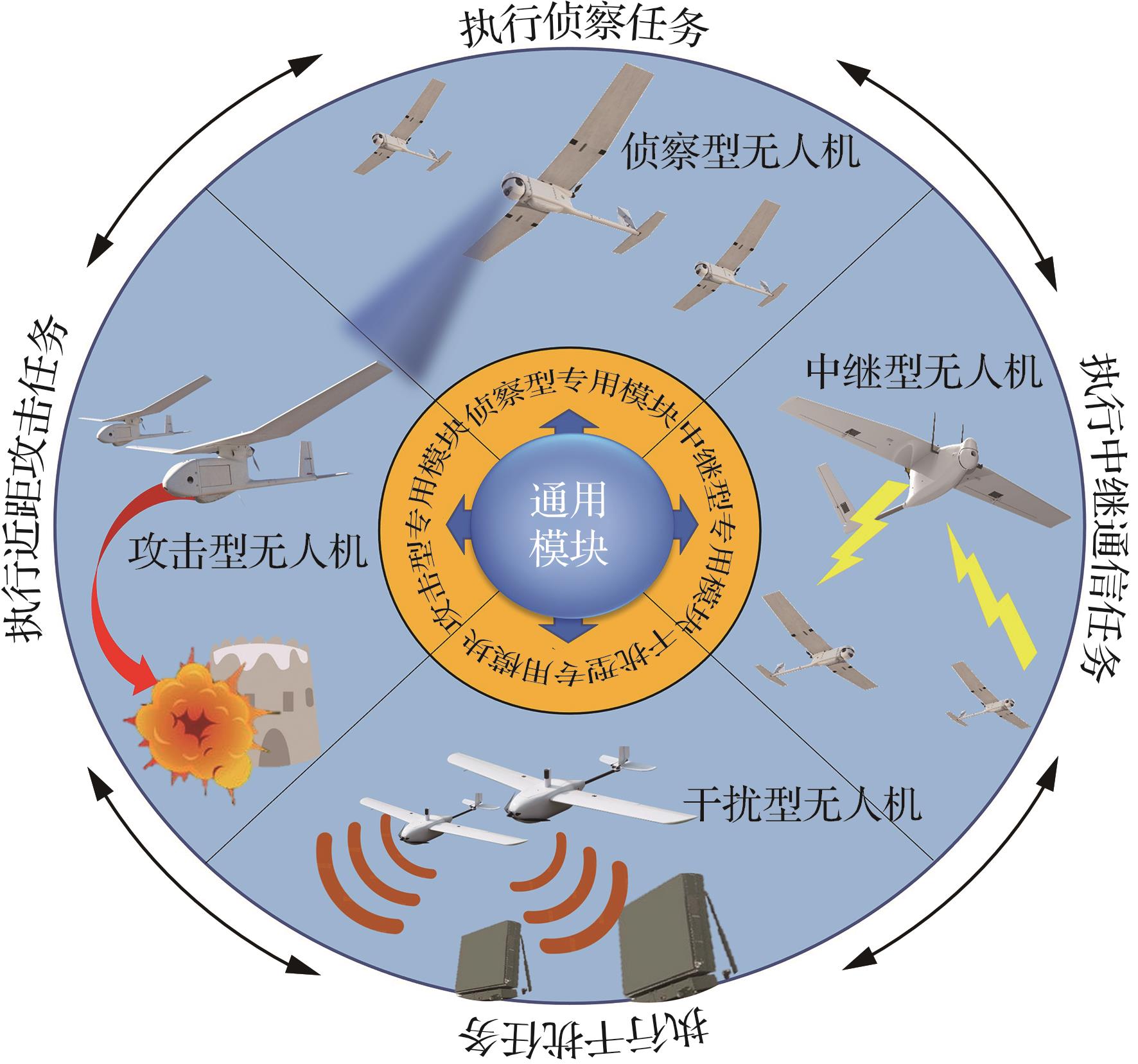

Fig. 2
Flow chart of modular UAV configuration


Fig. 3
Schematic diagram of task requirements description
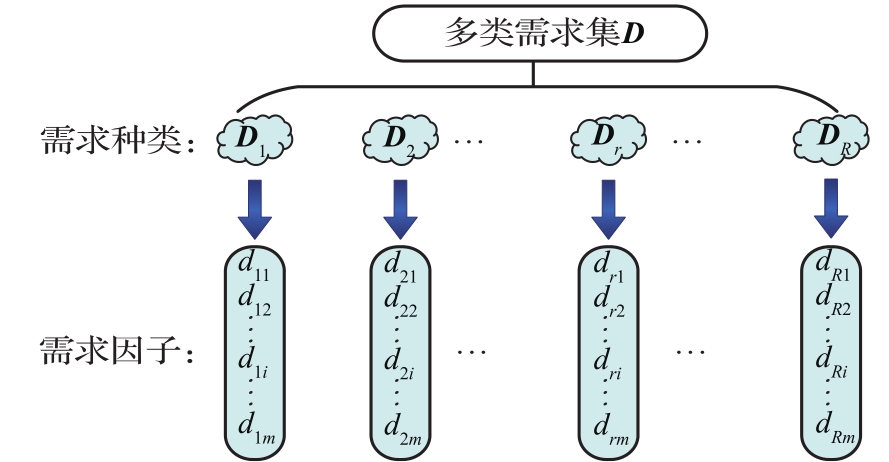

Fig. 4
Mapping relationship between dedicated module alternative elements and module composition attributes
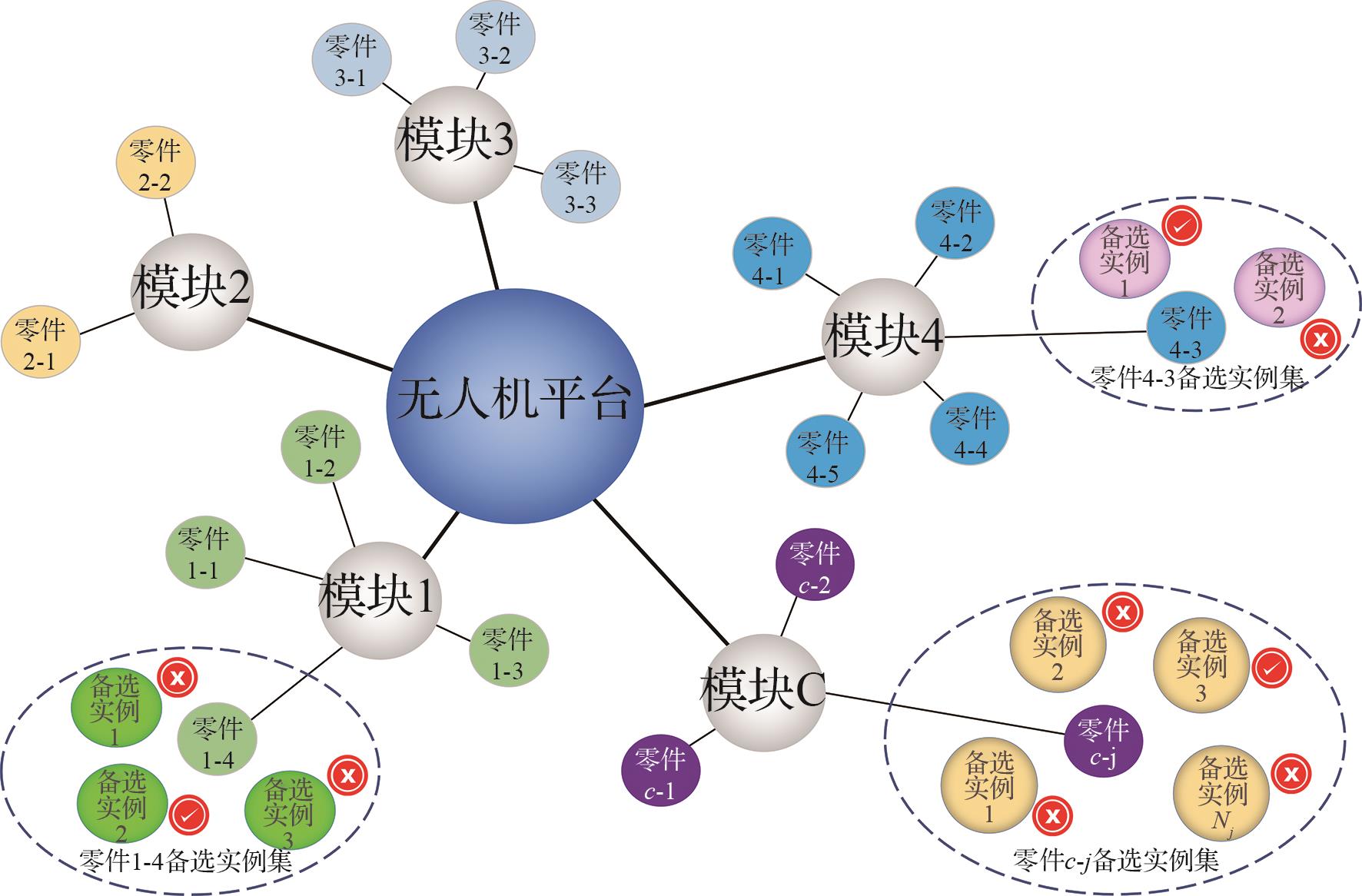
Table 1
Evaluation criteria of correlation relationship
| 序号 | 关联度 | 评判标准 | 含义 |
|---|---|---|---|
| 1 | 强关联关系 | 7~9 | 表示2个因素之间相辅相成,缺一不可 |
| 2 | 中等关联关系 | 4~6 | 表示2个因素之间具备辅助作用 |
| 3 | 弱关联关系 | 1~3 | 表示2个因素之间具备局部的联系 |
| 4 | 无关联关系 | 0 | 表示2个因素之间无任何关联 |
Table 2
Quality standards for expert evaluation
| 信度值 | 职称 | 专业领域 | 从业年限 |
|---|---|---|---|
| 0.7~0.9 | 正高 | 无人机总体 | 10 |
| 0.4~0.6 | 副高 | 无人机分系统 | 5~10 |
| 0.1~0.3 | 工程师 | 其他相关领域 | 低于5 |
Fig. 5
Variation of maximum fitness with number of iterations
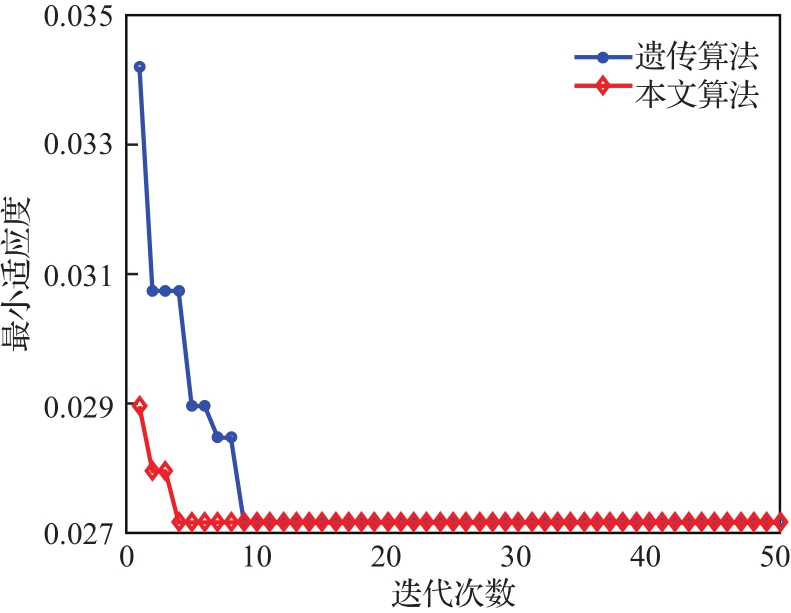
Fig. 6
Variation of average fitness with number of iterations
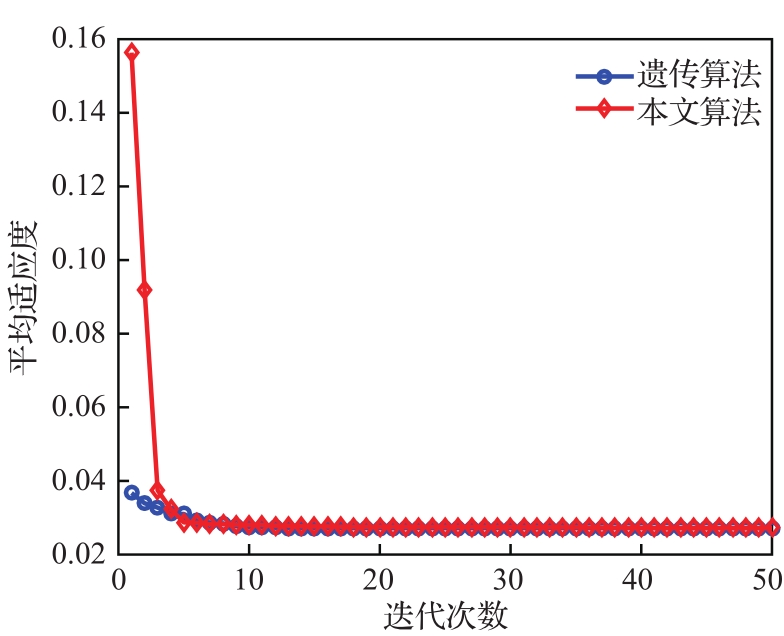
Table 3
Comparison of results of three optimization methods
| 算法 | 最小适应度 | 最大适应度迭代次数 | 第5次迭代的平均适应度 | 局部收敛次数 | 适应度函数调用次数 |
|---|---|---|---|---|---|
| 改进粒子群算法 | 0.027 2 | 4 | 0.029 2 | 0 | 235 |
| 对照遗传算法 | 0.027 2 | 9 | 0.031 | 3 | 810 |
| 文献中遗传算法 | 0.027 2 | 23 | ≈0.030 3 |

Fig. 7
View of UAV task scenario
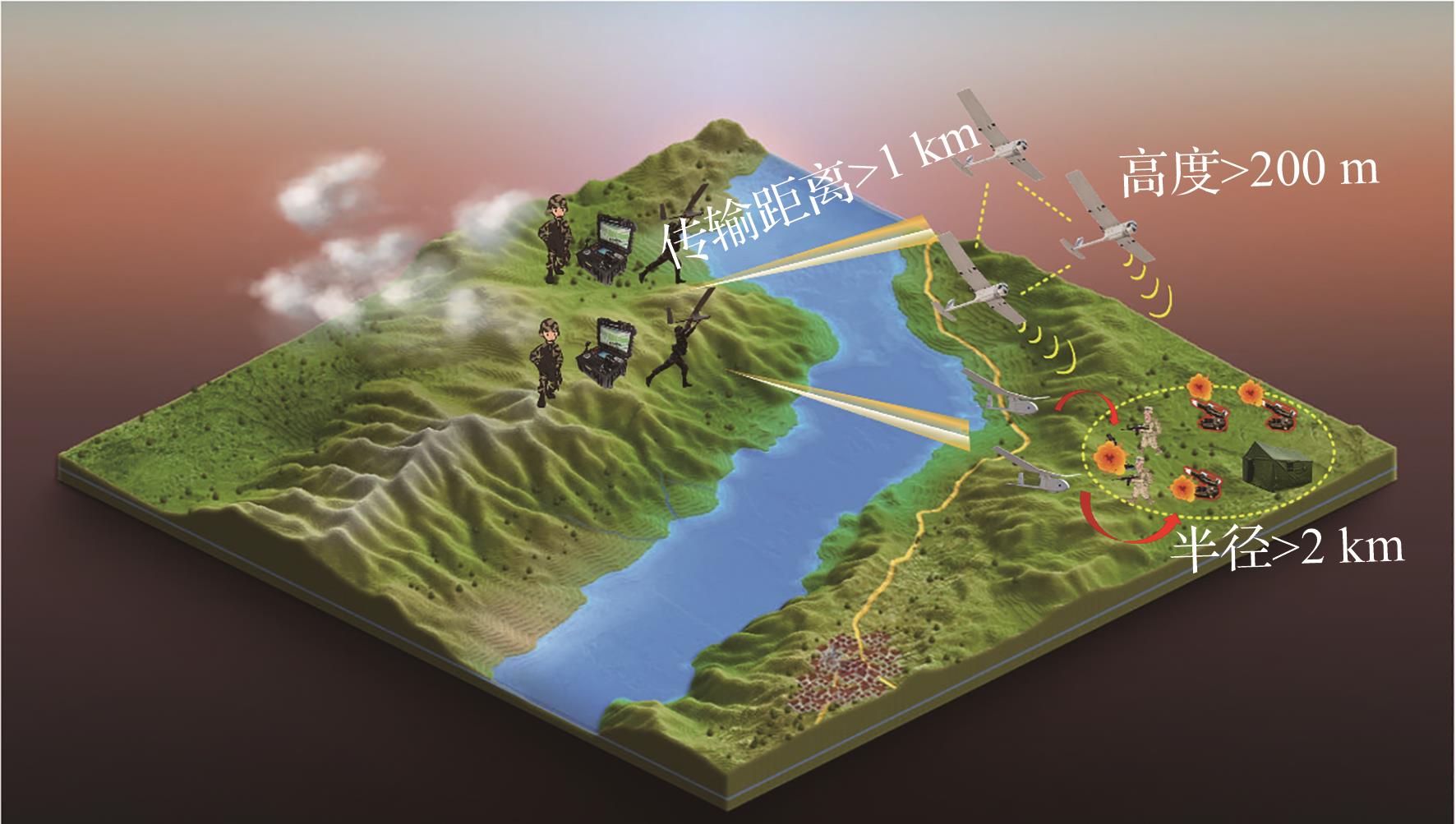
Table 4
Mission requirements of UAV
| 序号 | 编号 | 任务需求 | |
|---|---|---|---|
| 1 | 航程需求:覆盖敌方火力范围 | ||
| 2 | 航时需求:支撑无人机完成任务 | ||
| 3 | 隐蔽性需求:能够避开敌方地面人员视线 | ||
| 4 | 侦察需求:侦查范围覆盖敌方活动区域 | ||
| 5 | 攻击需求:具备一定的攻击能力 | ||
Table 5
Performance requirements of UAV
| 序号 | 编号 | 无人机性能 |
|---|---|---|
| 1 | 航程≥1 km | |
| 2 | 航时≥30 min | |
| 3 | 飞行高度≥200 m | |
| 4 | 侦察范围半径≥0.5 km区域 | |
| 5 | 探测距离≥1 km | |
| 6 | 杀伤范围≥5 m |
Table 6
Alternative elements of special-use modules for disposable UAVs
| 模块名称 | 模块备选元素 | 成本/元 |
|---|---|---|
| 动力模块 | LY X3120电机 | 305 |
| EDF90 mm涵道风扇 | 420 | |
| HY电子调速器 | 265 | |
| EP-40A电子调速器 | 368 | |
| 铝合金桨夹 | 50 | |
| 钢制桨夹 | 35 | |
| 碳纤维桨叶 | 120 | |
| 木制桨叶 | 60 | |
| 通信与电源模块 | 镍氢电池 | 4 000 |
| 6S锂电池 | 5 000 | |
| 分立式电源管理板 | 1 000 | |
| 集成式电源管理板 | 1 500 | |
| 传输距离3 km数据链 | 20 000 | |
| 传输距离5 km数据链 | 30 000 | |
| 传输距离7 km数据链 | 40 000 | |
| 数据链共型天线 | 900 | |
| 数据链柱状天线 | 150 | |
| 单光导引头 | 10 000 | |
| 双光导引头 | 25 000 | |
| 三光导引头 | 50 000 | |
| 控制执行模块 | 碳纤维平尾、垂尾 | 800 |
| 玻璃钢平尾、垂尾 | 400 | |
| KST X80舵机 | 1 400 | |
| GDW DS1906B舵机 | 600 | |
| 发射与回收模块 | 手抛方式 | |
| 燃气组件 | 2 000 | |
| 弹射组件 | 1 000 | |
| 撞网回收组件 | 900 | |
| 伞降回收组件 | 1 200 | |
| 战斗模块 | 电子引信 | 5 000 |
| 机械引信 | 3 000 | |
| 0.5 kg战斗部 | 1 000 | |
| 1 kg战斗部 | 2 000 |
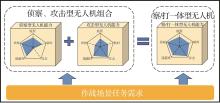
Fig. 8
Differences in task requirements at different stages
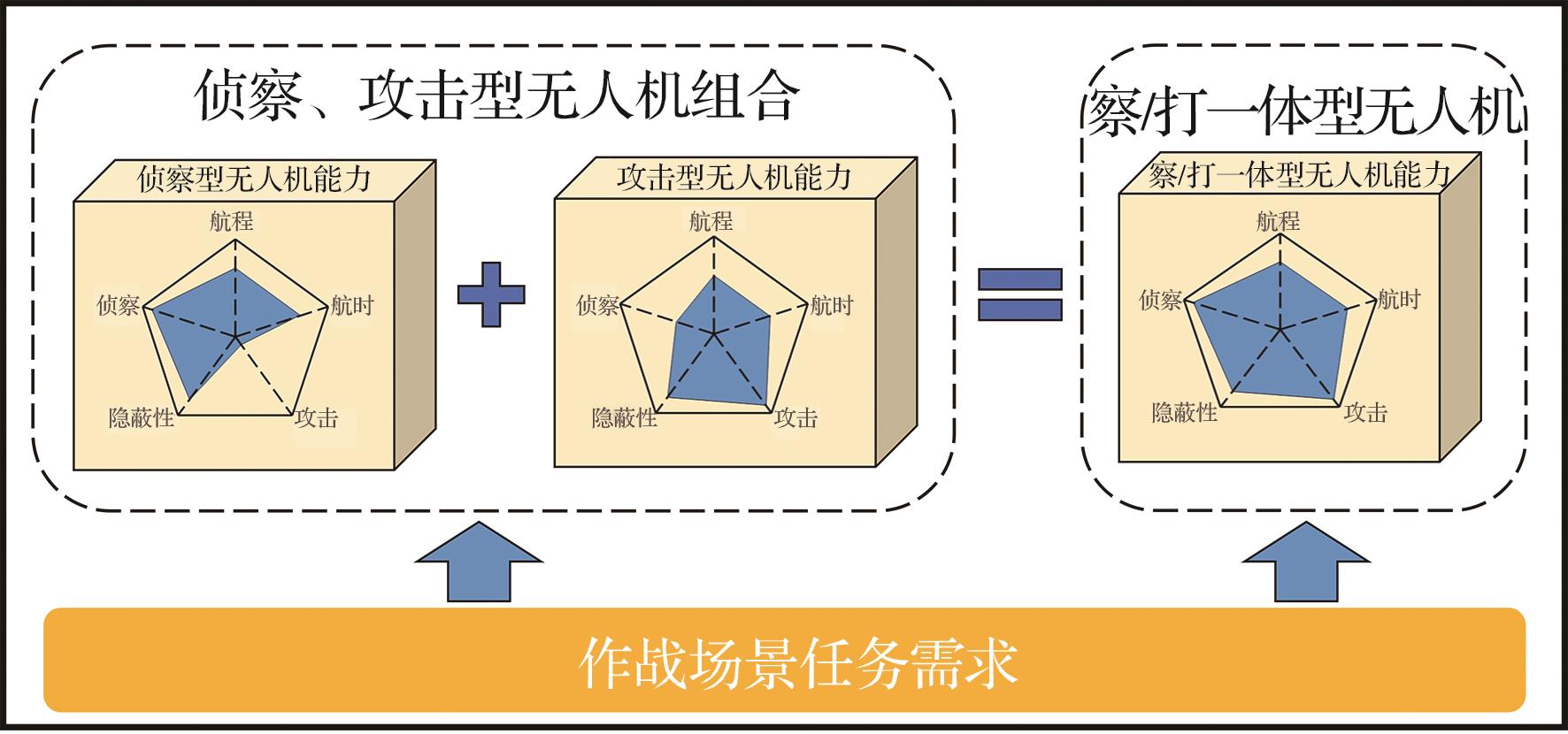
Table 7
Costs of parts of UAV
| 序号 | 模块(或部件)名称 | 成本/万元 | |
|---|---|---|---|
| 合计 | 10.0 | ||
| 1 | 通用模块 | 结构模块 | 0.5 |
| 2 | 飞控模块 | 2.5 | |
| 3 | 专用模块 | 配置专用模块 | 7.0 |
Fig.9
Optimal convergence curves of surveillance UAV
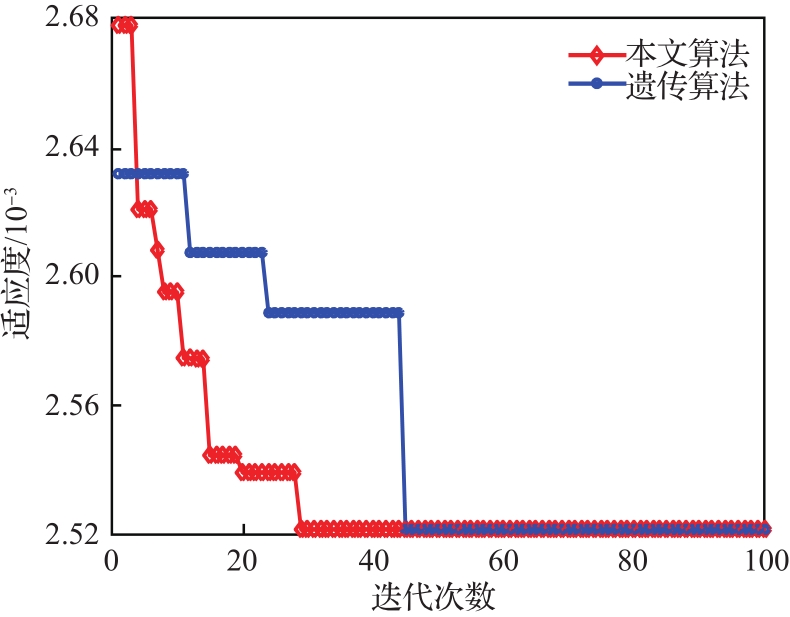
Table 8
Configuration plan of special-use modules for surveillance UAV
| 序号 | 专用模块名称 | 备选元素 | 成本/元 |
|---|---|---|---|
| 1 | 动力模块 | LY X3120电机 | 305 |
| 2 | HY电子调速器 | 265 | |
| 3 | 铝合金桨夹 | 50 | |
| 4 | 碳纤维桨叶 | 120 | |
| 5 | 通信与电源 模块 | 6S锂电池 | 5 000 |
| 6 | 集成式电源管理板 | 1 500 | |
| 7 | 传输距离5 km数据链 | 30 000 | |
| 8 | 数据链共型天线 | 900 | |
| 9 | 双光导引头 | 25 000 | |
| 10 | 控制执行 模块 | 碳纤维平尾、垂尾 | 800 |
| 11 | GDW DS1906B舵机 | 600 | |
| 12 | 发射与回收 模块 | 手抛方式 | 0 |
| 13 | 伞降回收组件 | 1 200 | |
| 合计 | 65 740 | ||

Fig. 10
Cost proportion of surveillance UAV
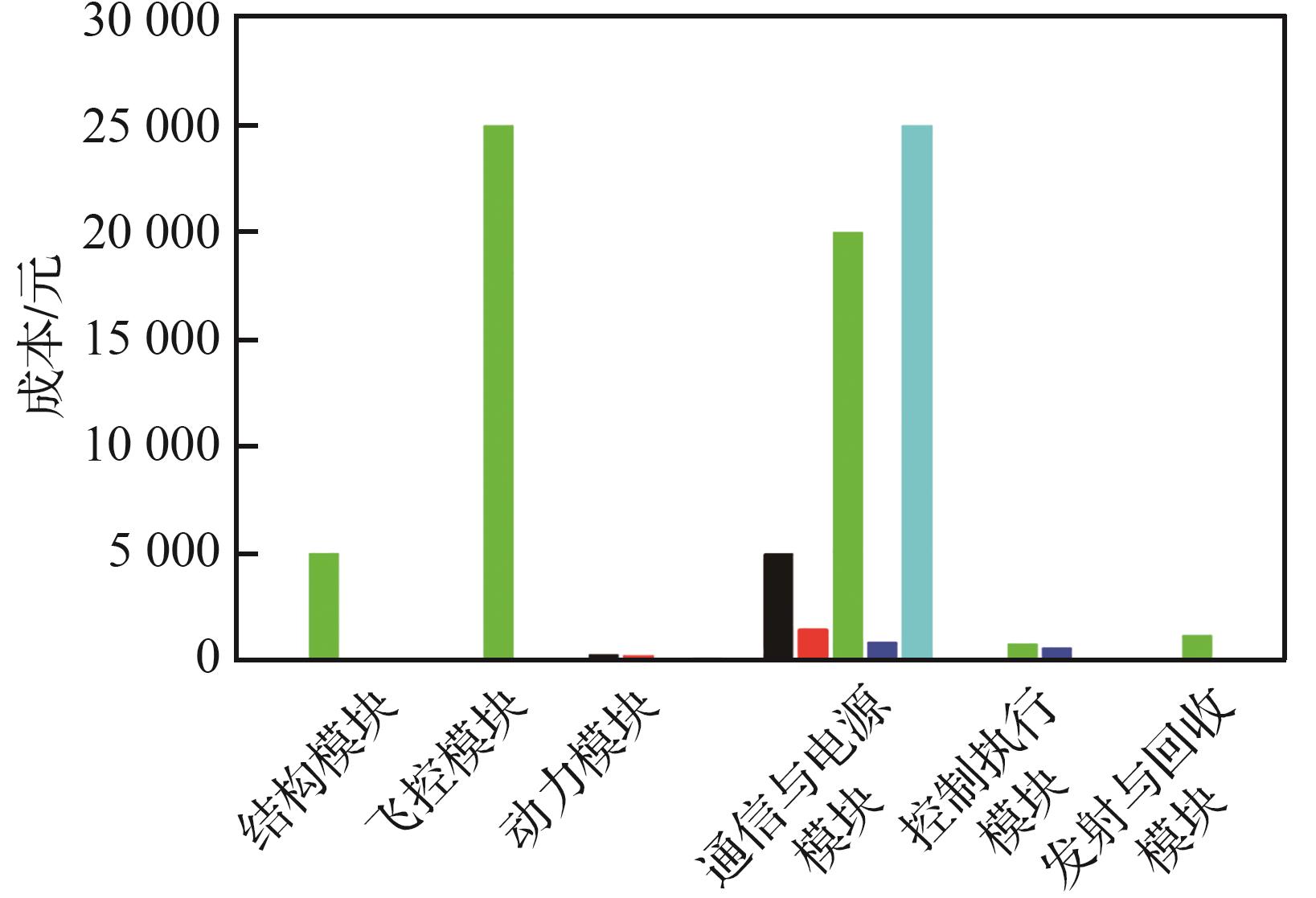
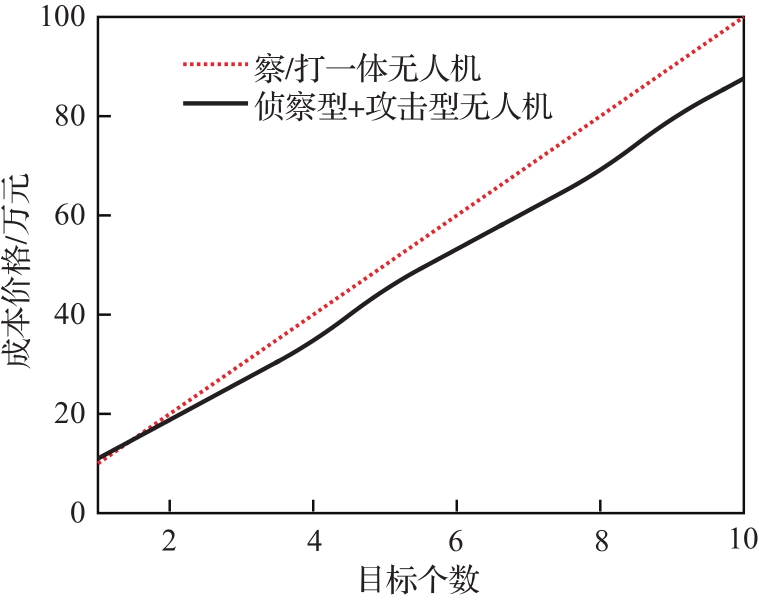
Fig. 11
Task cost varied with target number
| 1 | 焦士俊, 王冰切, 刘剑豪, 等. 国内外无人机蜂群研究现状综述[J]. 航天电子对抗, 2019, 35(1): 61-64. |
| JIAO S J, WANG B Q, LIU J H, et al. Review of drone swarm research at home and abroad[J]. Aerospace Electronic Warfare, 2019, 35(1): 61-64 (in Chinese). | |
| 2 | 贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41(S1): 723738. |
| JIA Y N, TIAN S Y, LI Q. Recent development of unmanned aerial vehicle swarms[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723738 (in Chinese). | |
| 3 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732. |
| WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732 (in Chinese). | |
| 4 | ZHOU F, JI Y J, JIAO R J. Affective and cognitive design for mass personalization: Status and prospect[J]. Journal of Intelligent Manufacturing, 2013, 24(5): 1047-1069. |
| 5 | BERRY C. Product architecting for personalization[J]. Journal of Manufacturing Systems, 2013, 32(3): 404-411. |
| 6 | KUMAR A. From mass customization to mass personalization: A strategic transformation[J]. International Journal of Flexible Manufacturing Systems, 2007, 19(4): 533-547. |
| 7 | 盛步云, 汪星刚, 萧筝, 等. 基于客户需求分析的模块化产品配置方法[J]. 计算机集成制造系统, 2017, 23(10): 2091-2100. |
| SHENG B Y, WANG X G, XIAO Z, et al. Modular product configuration method based on customer requirement analysis[J]. Computer Integrated Manufacturing Systems, 2017, 23(10): 2091-2100 (in Chinese). | |
| 8 | 李浩, 陶飞, 文笑雨, 等. 面向大规模个性化的产品服务系统模块化设计[J]. 中国机械工程, 2018, 29(18): 2204-2214, 2249. |
| LI H, TAO F, WEN X Y, et al. Modular design of product-service systems oriented to mass personalization[J]. China Mechanical Engineering, 2018, 29(18): 2204-2214, 2249 (in Chinese). | |
| 9 | 张英英, 夏一, 杜纲. 产品族配置与考虑升级的再制造设计主从关联优化[J]. 计算机集成制造系统, 2021, 27(7): 2053-2064. |
| ZHANG Y Y, XIA Y, DU G. Leader-follower joint optimization of product family configuration and remanufacturing design considering upgrade[J]. Computer Integrated Manufacturing Systems, 2021, 27(7): 2053-2064 (in Chinese). | |
| 10 | 杜纲, 张铁斌, 缪琛璐, 等. 产品族模块化设计与平台配置的主从关联优化[J]. 计算机集成制造系统, 2018, 24(2): 455-463. |
| DU G, ZHANG T B, MIAO C L, et al. Hierarchical joint optimization for modular design in product family coordinated with product platform configuration[J]. Computer Integrated Manufacturing Systems, 2018, 24(2): 455-463 (in Chinese). | |
| 11 | KOTARSKI D, PILJEK P, PRANJI\U 0107 M, et al. A modular multirotor unmanned aerial vehicle design approach for development of an engineering education platform[J]. Sensors (Basel, Switzerland), 2021, 21(8): 2737. |
| 12 | CHOWDHURY S, MALDONADO V, TONG W Y, et al. New modular product-platform-planning approach to design macroscale reconfigurable unmanned aerial vehicles[J]. Journal of Aircraft, 2016, 53(2): 309-322. |
| 13 | 杨延平, 张子健, 应培, 等. 集群组合式柔性无人机:创新、机遇及技术挑战[J]. 飞行力学, 2021, 39(2): 1-9, 15. |
| YANG Y P, ZHANG Z J, YING P, et al. Flexible modular swarming UAV: Innovative, opportunities, and technical challenges[J]. Flight Dynamics, 2021, 39(2): 1-9, 15 (in Chinese). | |
| 14 | 罗利龙, 王立凯, 聂小华. 一种面向模块化可重构机翼的分步补偿优化方法[J]. 北京航空航天大学学报, 2019, 45(5): 930-935. |
| LUO L L, WANG L K, NIE X H. A step-compensation optimization method for modular reconfigurable airfoil[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(5): 930-935 (in Chinese). | |
| 15 | 李春鹏, 张铁军, 钱战森, 等. 多用途无人机模块化布局气动设计[J]. 航空学报, 2022, 43(7): 125411. |
| LI C P, ZHANG T J, QIAN Z S, et al. Aerodynamic design of modular configuration for multi-mission unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(7): 125411 (in Chinese). | |
| 16 | 华厚强. 模块化低空长航时无人机的设计与实现[J]. 电子测量技术, 2021, 44(9): 13-21. |
| HUA H Q. Design and implementation of a modular low-altitude long-endurance UAV[J]. Electronic Measurement Technology, 2021, 44(9): 13-21 (in Chinese). | |
| 17 | 郏维强, 刘振宇, 刘达新, 等. 基于模糊关联的复杂产品模块化设计方法及其应用[J]. 机械工程学报, 2015, 51(5): 130-142. |
| JIA W Q, LIU Z Y, LIU D X, et al. Modular design method and application for complex product based on fuzzy correlation analysis[J]. Journal of Mechanical Engineering, 2015, 51(5): 130-142 (in Chinese). | |
| 18 | 任彬, 张树有, 伊国栋. 基于模糊多属性决策的复杂产品配置方法[J]. 机械工程学报, 2010, 46(19): 108-116. |
| REN B, ZHANG S Y, YI G D. Configuration design of complex products based on fuzzy multi-attribute decision-making[J]. Journal of Mechanical Engineering, 2010, 46(19): 108-116 (in Chinese). | |
| 19 | 黄柏雄, 周德俭, 袁海英. 基于改进加权和算法的模块化产品配置设计[J]. 机械设计与制造, 2016(4): 245-248. |
| HUANG B X, ZHOU D J, YUAN H Y. Modular product configuration design based on the improved weighted and algorithm[J]. Machinery Design & Manufacture, 2016(4): 245-248 (in Chinese). | |
| 20 | 武浩远, 黎荣, 王建, 等. 客户需求驱动的两阶段配置设计[J]. 机械设计与制造, 2020(12): 216-220. |
| WU H Y, LI R, WANG J, et al. Two-stage configuration design for customer requirement-driven[J]. Machinery Design & Manufacture, 2020(12): 216-220 (in Chinese). | |
| 21 | 杨建峰, 肖和业, 李亮, 等. 基于模糊聚类和专家评分机制的无人机多层次模块划分方法[J]. 系统工程与电子技术, 2022, 44(8): 2530-2539. |
| YANG J F, XIAO H Y, LI L, et al. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism[J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539 (in Chinese). | |
| 22 | 郭伟. 一款用于森林防火的小型无人机设计[D]. 南京: 南京航空航天大学, 2015. |
| GUO W. Design of small unmanned aerial vehicle used in forest fire prevention[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2015 (in Chinese). | |
| 23 | 王相兵, 杜全斌, 周航, 等. 客户需求驱动的柔性产品平台模块化设计方法研究[J]. 机械设计, 2020, 37(9): 100-111. |
| WANG X B, DU Q B, ZHOU H, et al. Research on modular design method of flexible product platform driven by customer demand[J]. Journal of Machine Design, 2020, 37(9): 100-111 (in Chinese). | |
| 24 | 史康云, 江屏, 闫会强, 等. 基于柔性产品平台的产品族开发[J]. 计算机集成制造系统, 2009, 15(10): 1880-1889. |
| SHI K Y, JIANG P, YAN H Q, et al. Product family design based on flexible product platform[J]. Computer Integrated Manufacturing Systems, 2009, 15(10): 1880-1889 (in Chinese). | |
| 25 | TIAN D P, SHI Z Z. MPSO: Modified particle swarm optimization and its applications[J]. Swarm and Evolutionary Computation, 2018, 41: 49-68. |
| 26 | ZHANG X W. A modified particle swarm optimization for multimodal multi-objective optimization[J]. Engineering Applications of Artificial Intelligence, 2020, 95: 103905. |
| 27 | HOLLAND J H. Genetic algorithms[J]. Scientific American, 1992, 267(1): 66-72. |
| 28 | 王硕, 施冬梅, 陶贵明, 等. 单兵巡飞弹发展现状及关键技术分析[J]. 飞航导弹, 2020(3): 40-45, 65. |
| WANG S, SHI D M, TAO G M, et al. Analysis of development status and key technologies of individual soldier patrol missile[J]. Aerodynamic Missile Journal, 2020(3): 40-45, 65 (in Chinese). | |
| 29 | 李增彦, 李小民. 单兵无人机发展现状及关键技术分析[J]. 飞航导弹, 2017(6): 23-29. |
| LI Z Y, LI X M. Analysis of development status and key technologies of individual UAV[J]. Aerodynamic Missile Journal, 2017(6): 23-29 (in Chinese). |
| [1] | . Topology optimization design of thermoelastic multi-configuration gradi-ent lattice structures [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [2] | Mi XU, Zebei MAO, Bo WANG, Tong LI. An equivalent⁃deformation⁃modulus algorithm for fast optimization of anisotropic material distribution in thin plates [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 229273-229273. |
| [3] | Jiaqi LIU, Rongqian CHEN, Jinhua LOU, Xu HAN, Hao WU, Yancheng YOU. Aerodynamic shape optimization of high-speed helicopter rotor airfoil based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529828-529828. |
| [4] | . Analysis of the characteristics of large-scale wavelength protuberances wings near the critical angle [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [5] | Jinzhao DAI, Haixin CHEN. Optimization design method of three⁃dimensional wave cancellation biplane derived by shock⁃wave morphology [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 628942-628942. |
| [6] | Shusheng CHEN, Muliang JIA, Yanxu LIU, Zhenghong GAO, Xinghao XIANG. Deformation modes and key technologies of aerodynamic layout design for morphing aircraft: Review [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629595-629595. |
| [7] | Chao AN, Guixi HUO, Yang MENG, Changchuan XIE, Chao YANG. Aerodynamic modeling methods and influence of layout parameters for wingtip⁃hinged multi⁃body combined UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629587-629587. |
| [8] | Liu LIU, Xianhong XIANG, Yufei ZHANG, Haixin CHEN, Chuang WEI, Jian ZHU, Pu YANG. A high lift-to-drag ratio unconventional blended-wing-body aerodynamic configuration with swallow tail [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 629630-629630. |
| [9] | Haifeng WANG. Key technologies in collaborative airframe⁃engine design for high performance fighters [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529978-529978. |
| [10] | Haoda LI, Teng LONG, Renhe SHI, Nianhui YE. Kriging?based mixed?integer optimization method using sample mapping mechanism for flight vehicle design [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(3): 228726-228726. |
| [11] | . Research progress of flapping wing aircraft with multimodal motion ability [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [12] | . Overall parameter design of solar UAV considering uncertainty [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [13] | . Integrated optimization of energy management strategy and mission path for hybrid-electric VTOL UAVs in cargo transportation [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [14] | Xuhui ZHANG, Chunlei XIE, Sijia LIU, Ming YAN, Siyuan XING. Development needs and difficulty analysis for smart morphing aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 529302-529302. |
| [15] | Yufei WU, Teng LONG, Renhe SHI, Yao ZHANG. Non⁃hierarchical multi⁃model fusion order reduction based on aerodynamic and aerothermodynamic characteristics for cross⁃domain morphing aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 528259-528259. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341