Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (18): 331837.doi: 10.7527/S1000-6893.2025.31837
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Chen WANG1, Caisheng WEI1( ), Zeyang YIN1, Kai JIN2, Xingchen LI3
), Zeyang YIN1, Kai JIN2, Xingchen LI3
Received:2025-01-22
Revised:2025-03-26
Accepted:2025-04-17
Online:2025-09-25
Published:2025-04-25
Contact:
Caisheng WEI
E-mail:caisheng_wei@csu.edu.cn
Supported by:CLC Number:
Chen WANG, Caisheng WEI, Zeyang YIN, Kai JIN, Xingchen LI. Collaborative planning of multi-UAV trajectories and communication strategies considering channel resource constraints[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 331837.
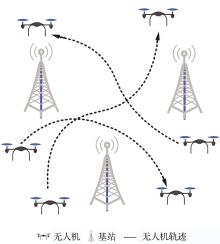
Fig.1
Multi-UAVs reconnaissance scene
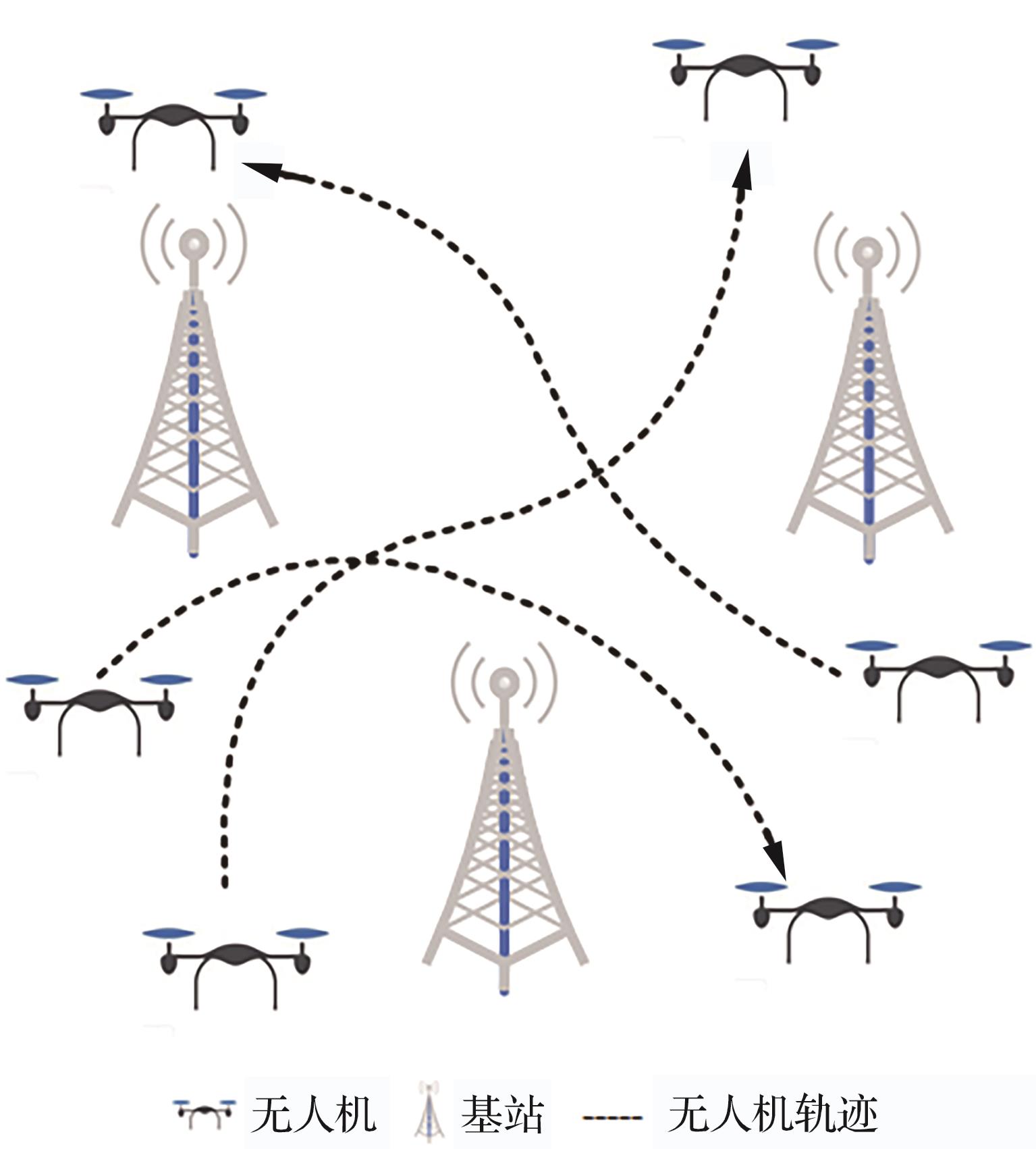
Fig.2
Diagram of force on UAV
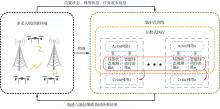
Fig.3
Framework diagram of a cooperative planning algorithm for Multi-UAV path and communication strategy based on MAPPO
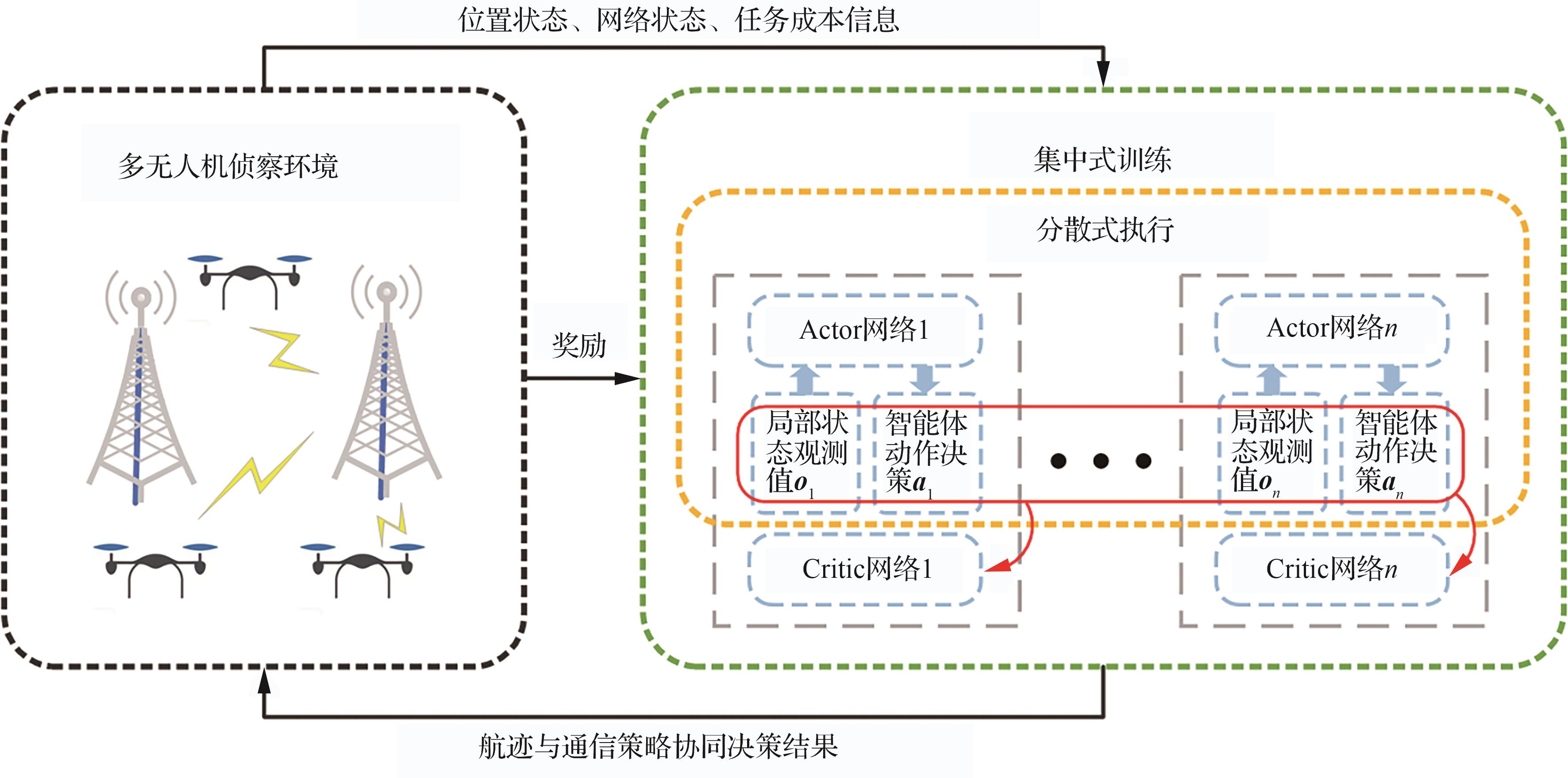
Table 1
Simulation parameters design
| 参数 | 参数含义 | 参数值设置 |
|---|---|---|
| 载波频率 | 2 | |
| 噪声功率谱密度 | -174 | |
| 带宽 | 1 | |
| 通信发射功率 | 10~20 | |
| 基站最大服务数 | 3 | |
| 策略网络的学习率 | 5×10-4 | |
| 评价网络的学习率 | 5×10-4 | |
| 总训练回合数 | 10×104 | |
| 每回合的最大步数 | 100 | |
| 折扣因子 | 0.99 | |
| Clip系数 | 0.2 | |
| 无人机最小线速度 | 0.1 | |
| 无人机最大线速度 | 12.5 | |
| 俯仰角最大变化值 | 1.047 2 | |
| 偏航角最大变化值 | 1.047 2 | |
| 线速度比例系数 | 0.1 | |
| 目标引力系数 | 1 | |
| 障碍物斥力系数 | 10 | |
| 安全距离阈值 | 500 | |
| 基站引力距离阈值 | 300 | |
| 飞行距离权重因子 | 0.1 | |
| 通信能耗权重因子 | 8 | |
| 信道容量权重因子 | 1 |
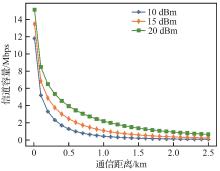
Fig.4
Relationship between channel capacity and communication distance under different communication transmission powers
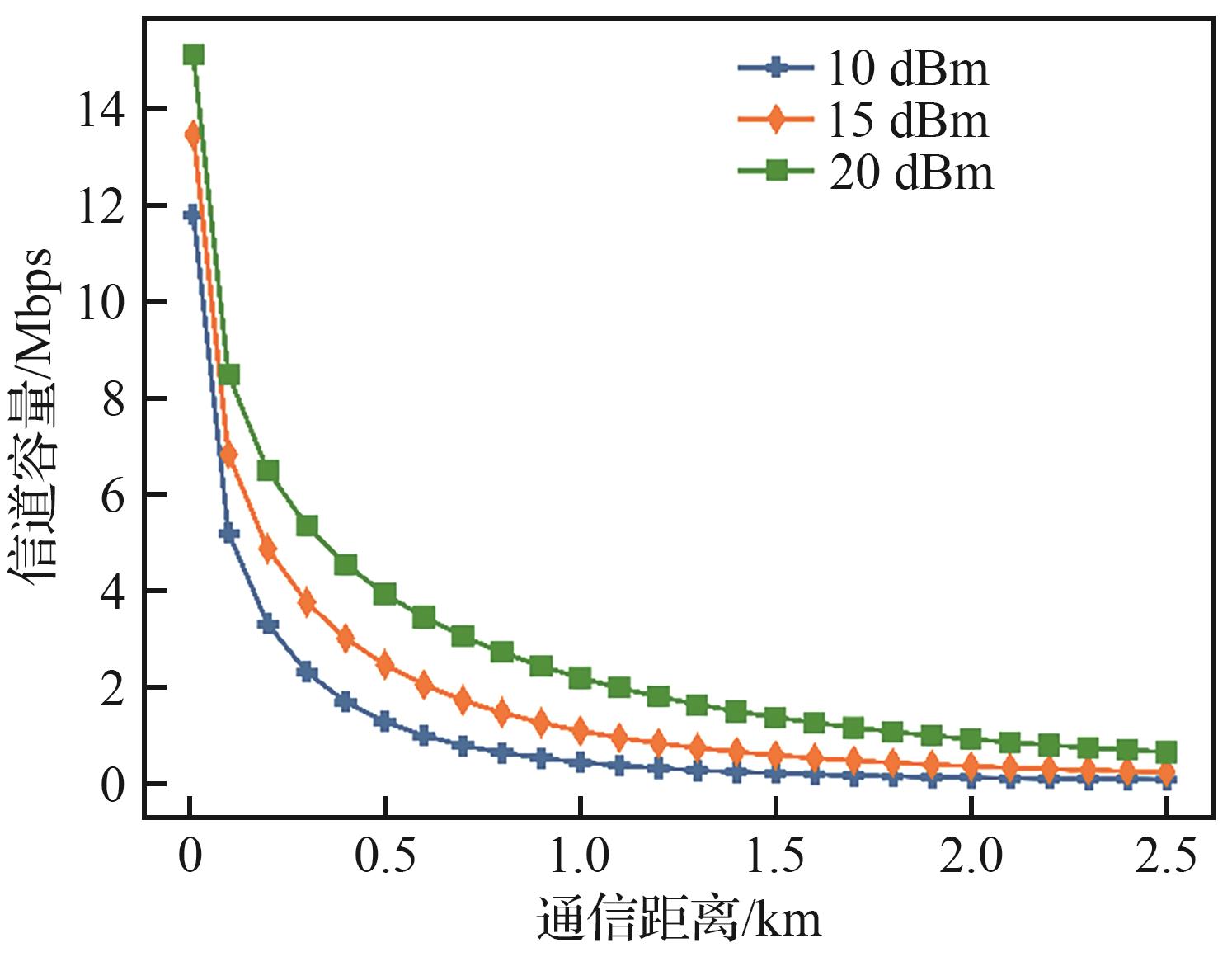
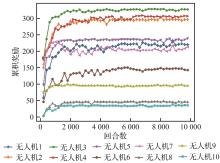
Fig.5
Variation of cumulative reward of each UAV per episode during training process
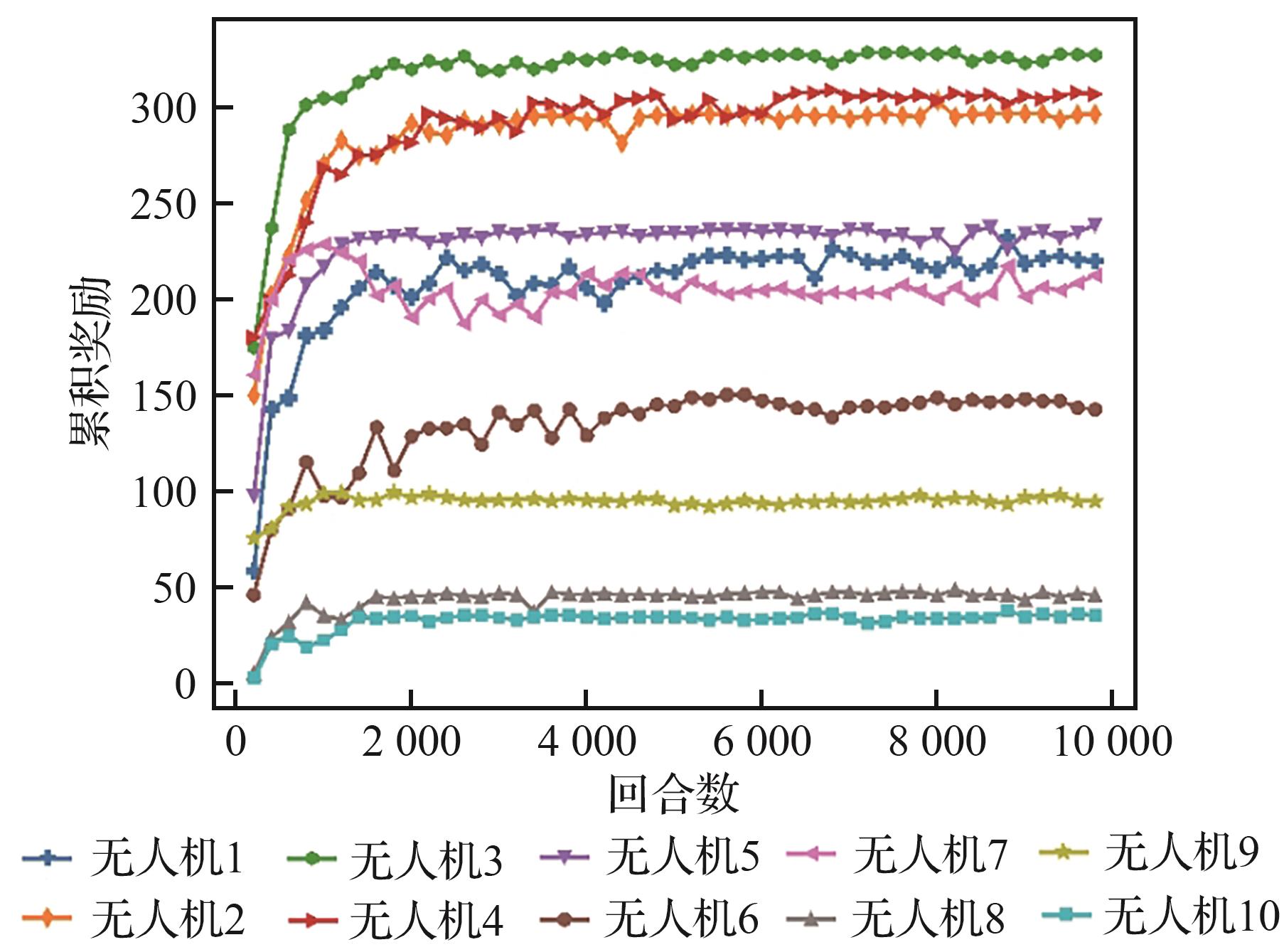
Fig.6
Variation of cumulative reward of all UAVs variation per episode during training process

Fig.7
Path planning results for multi-UAVs
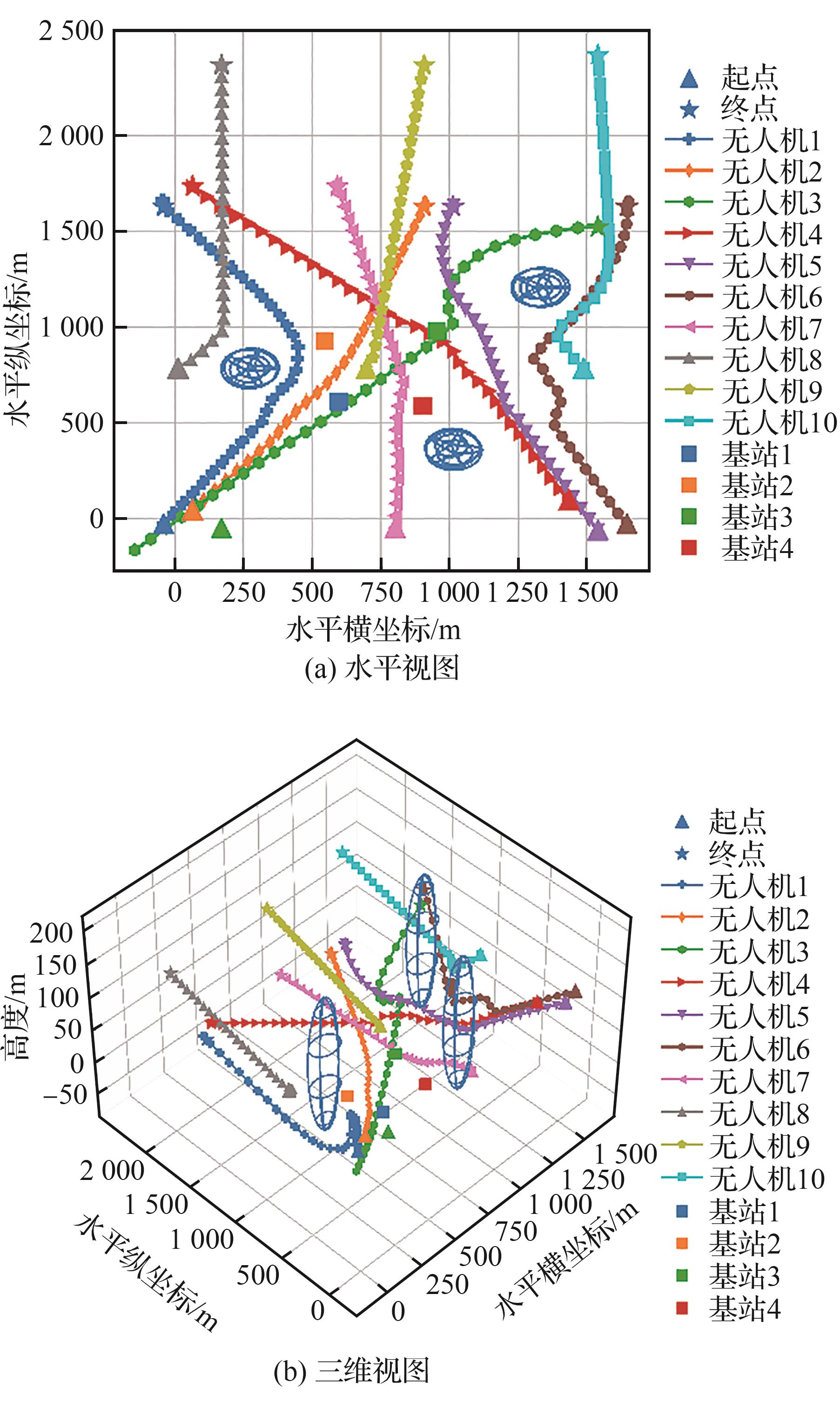

Fig.8
Variation of UAVs position during flight process
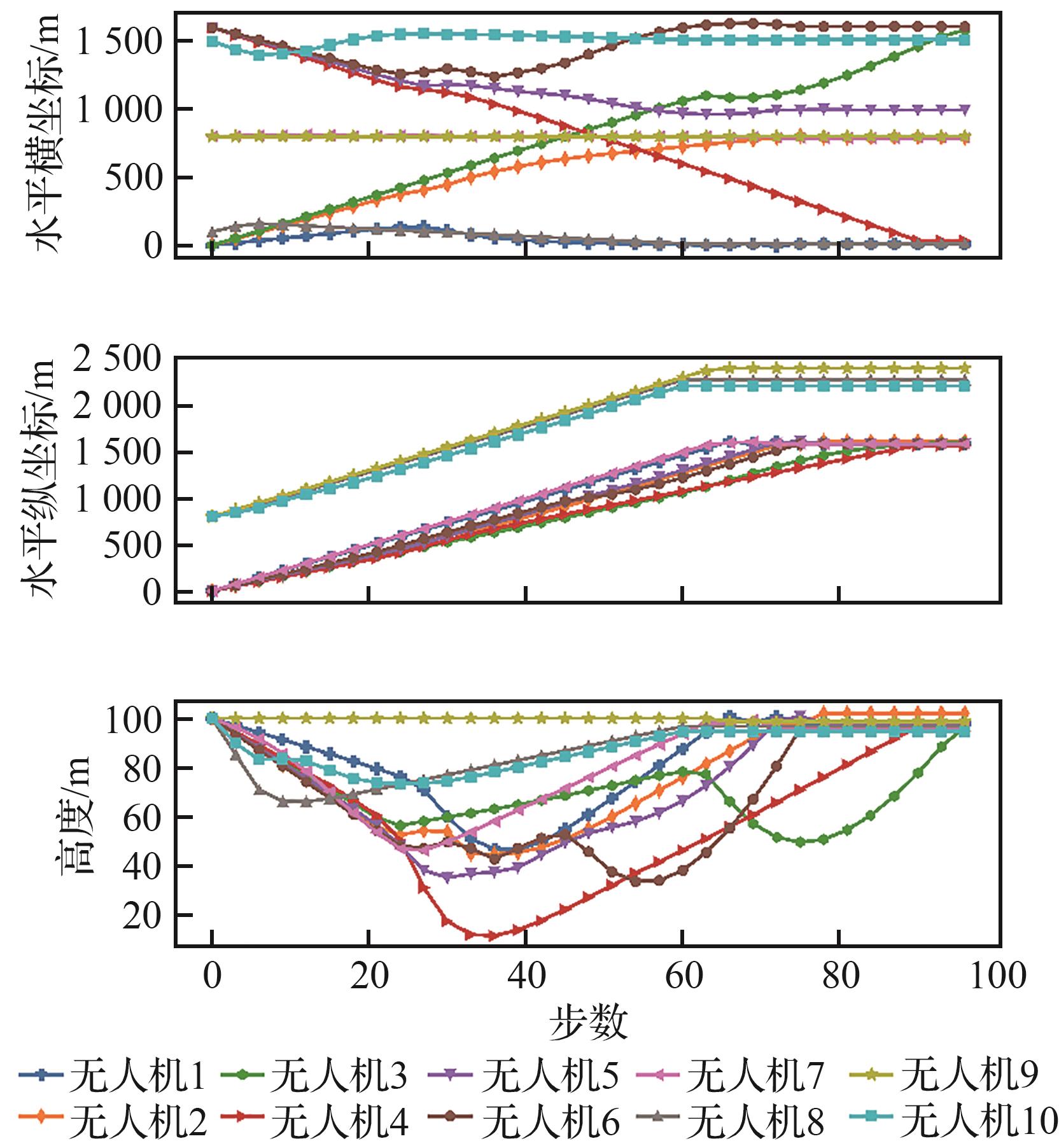
Fig.9
Variation of UAVs communication transmission power during flight process
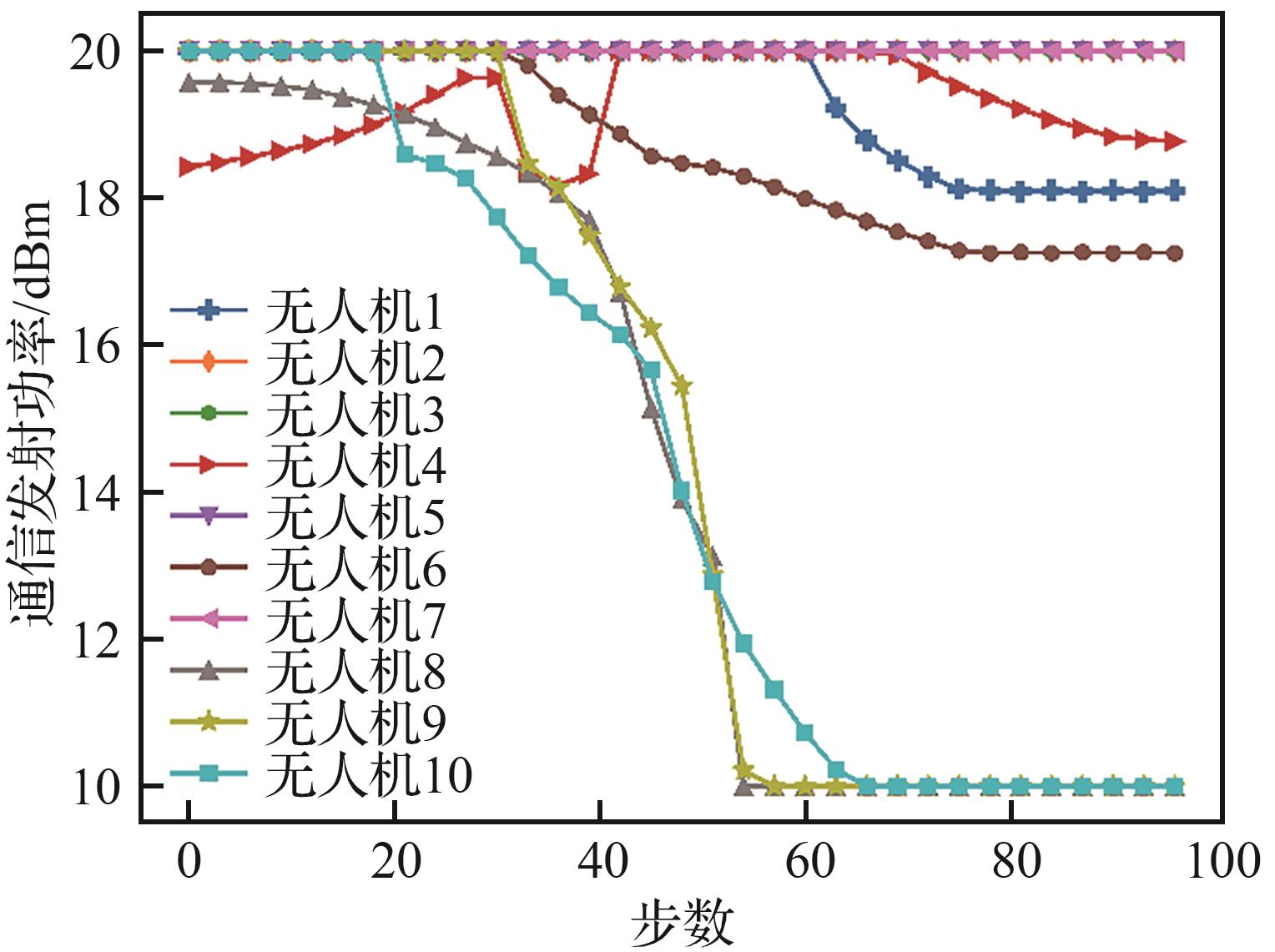
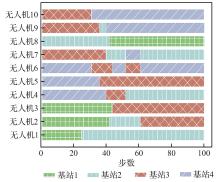
Fig.10
Variation of UAVs communication connection strategies during flight process
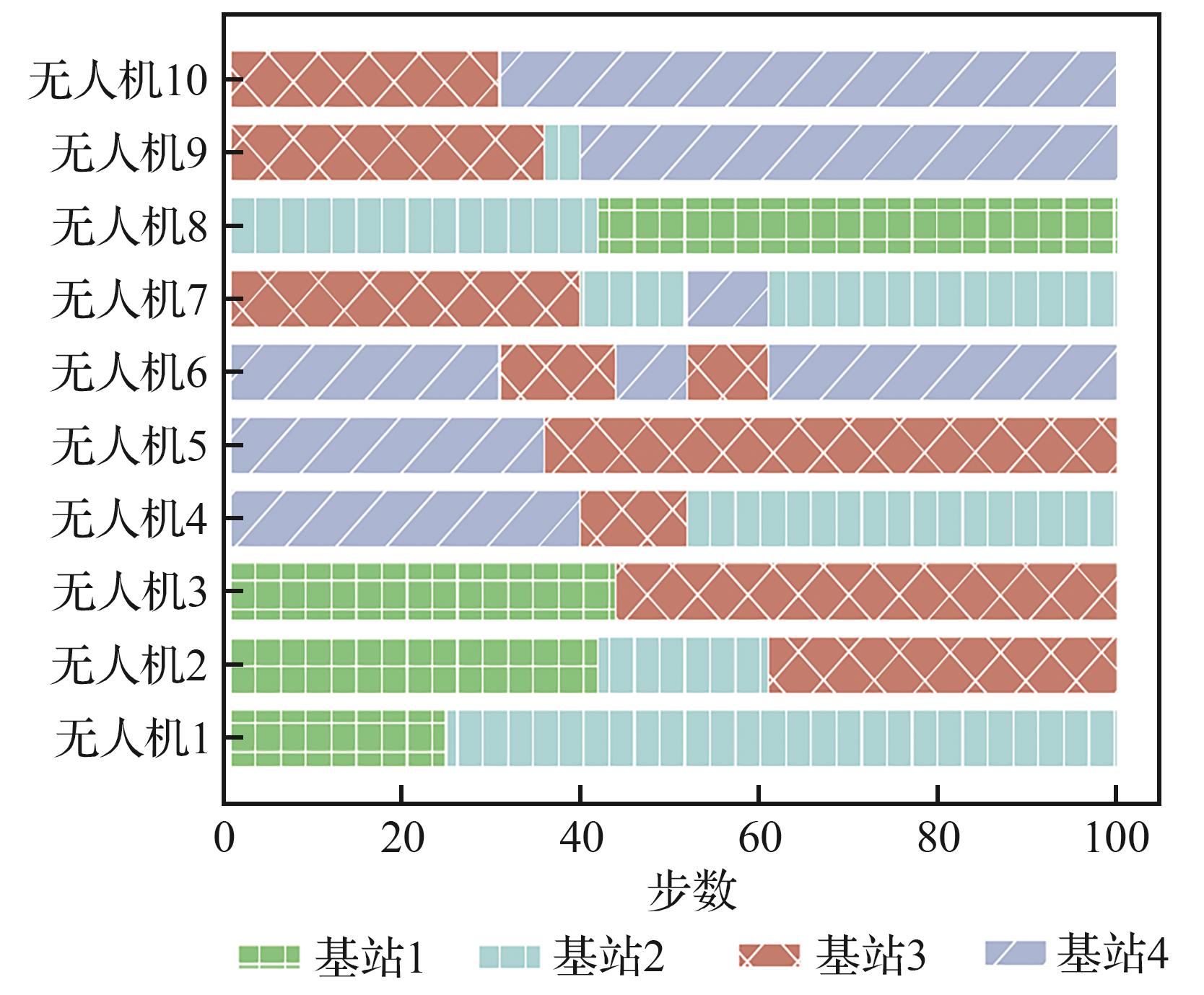
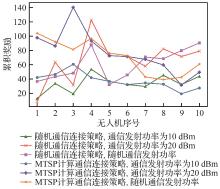
Fig.11
Influence of different communication connection strategies and different communication transmission powers on the cumulative reward value of each UAV
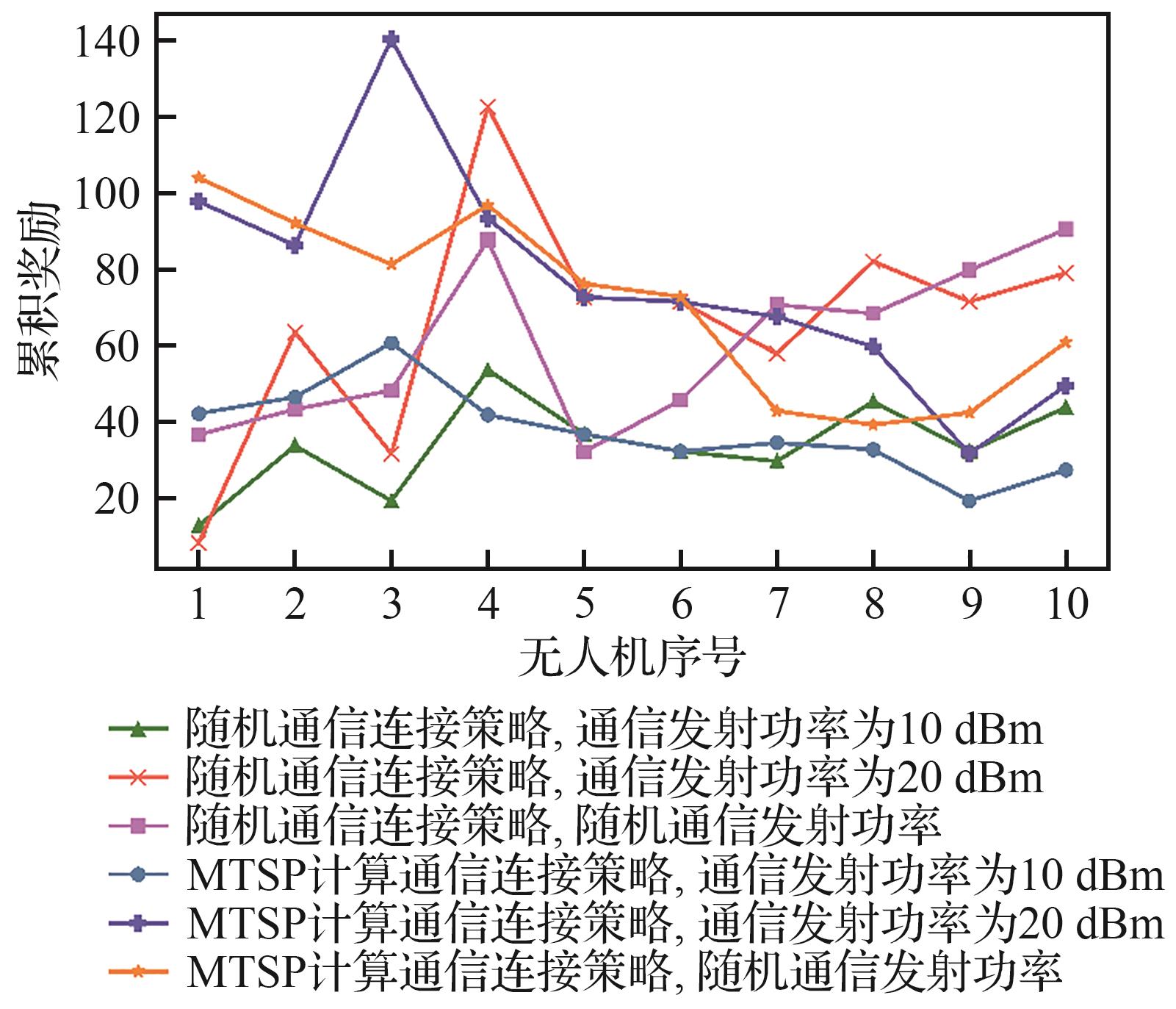
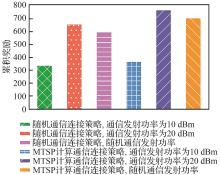
Fig.12
Influence of different communication connection strategies and different communication transmission powers on the sum of cumulative reward values of all UAVs
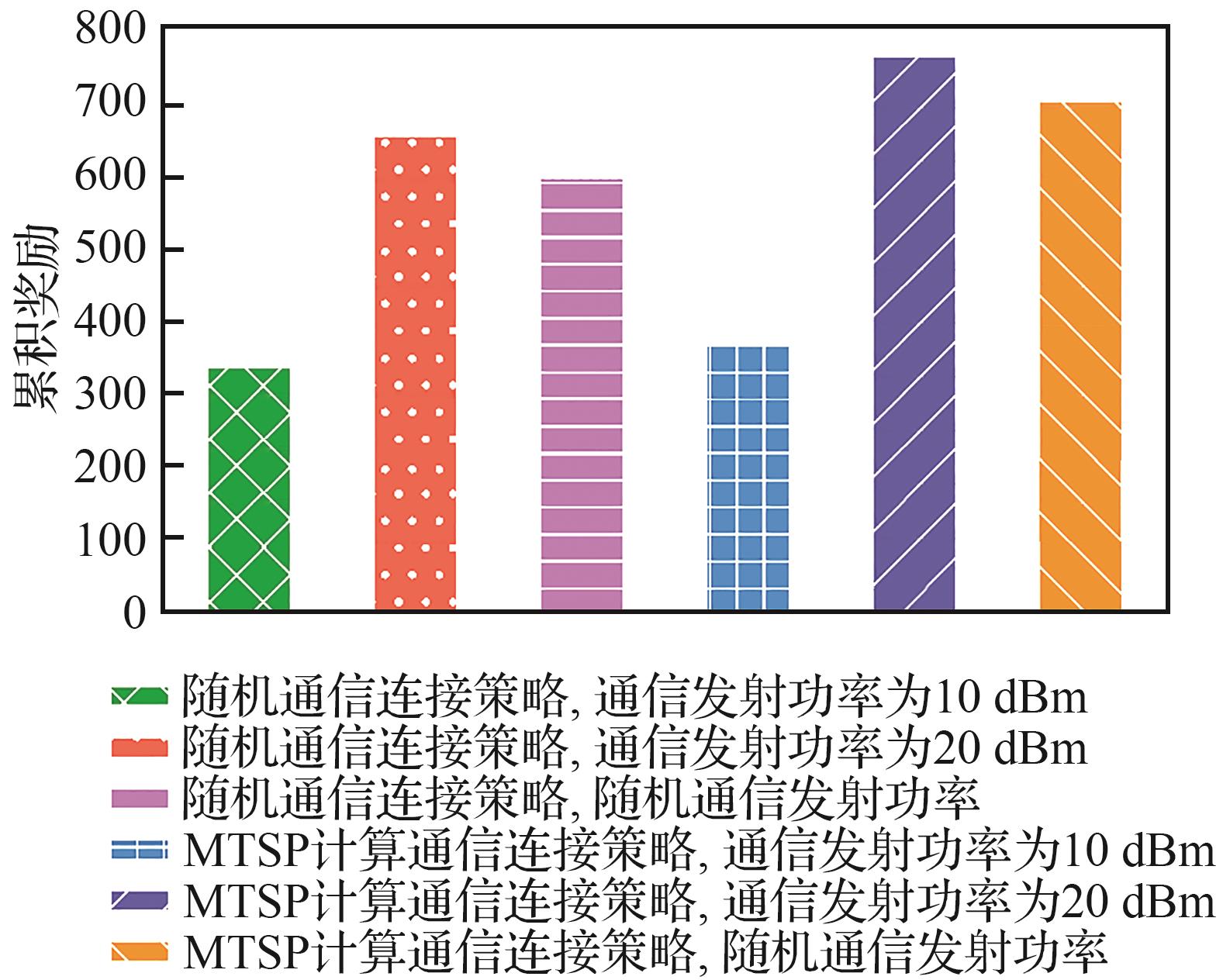
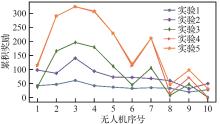
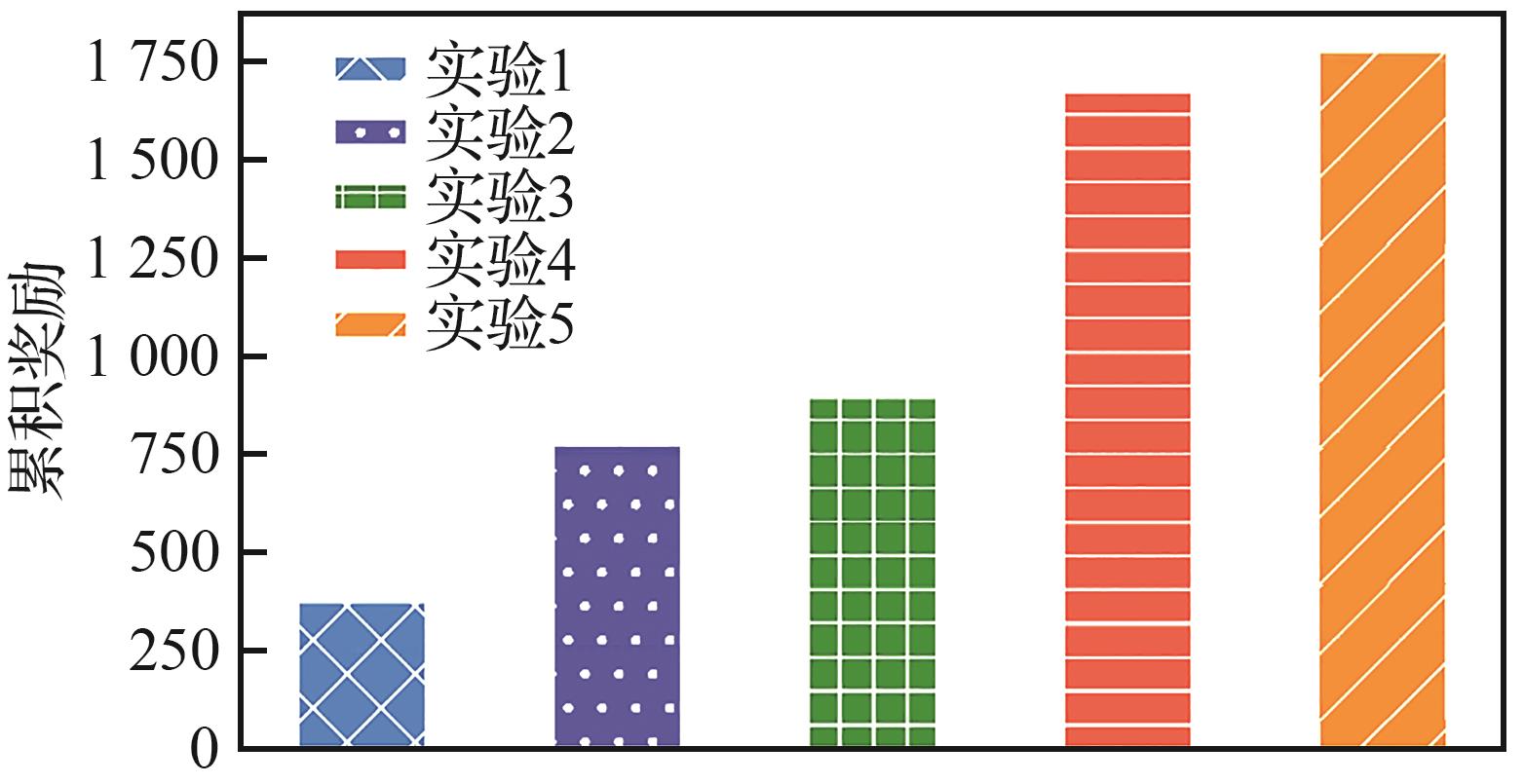
Fig.13
Comparison of reinforcement learning methods and the staged methods in terms of cumulative rewards accumulated by each UAV
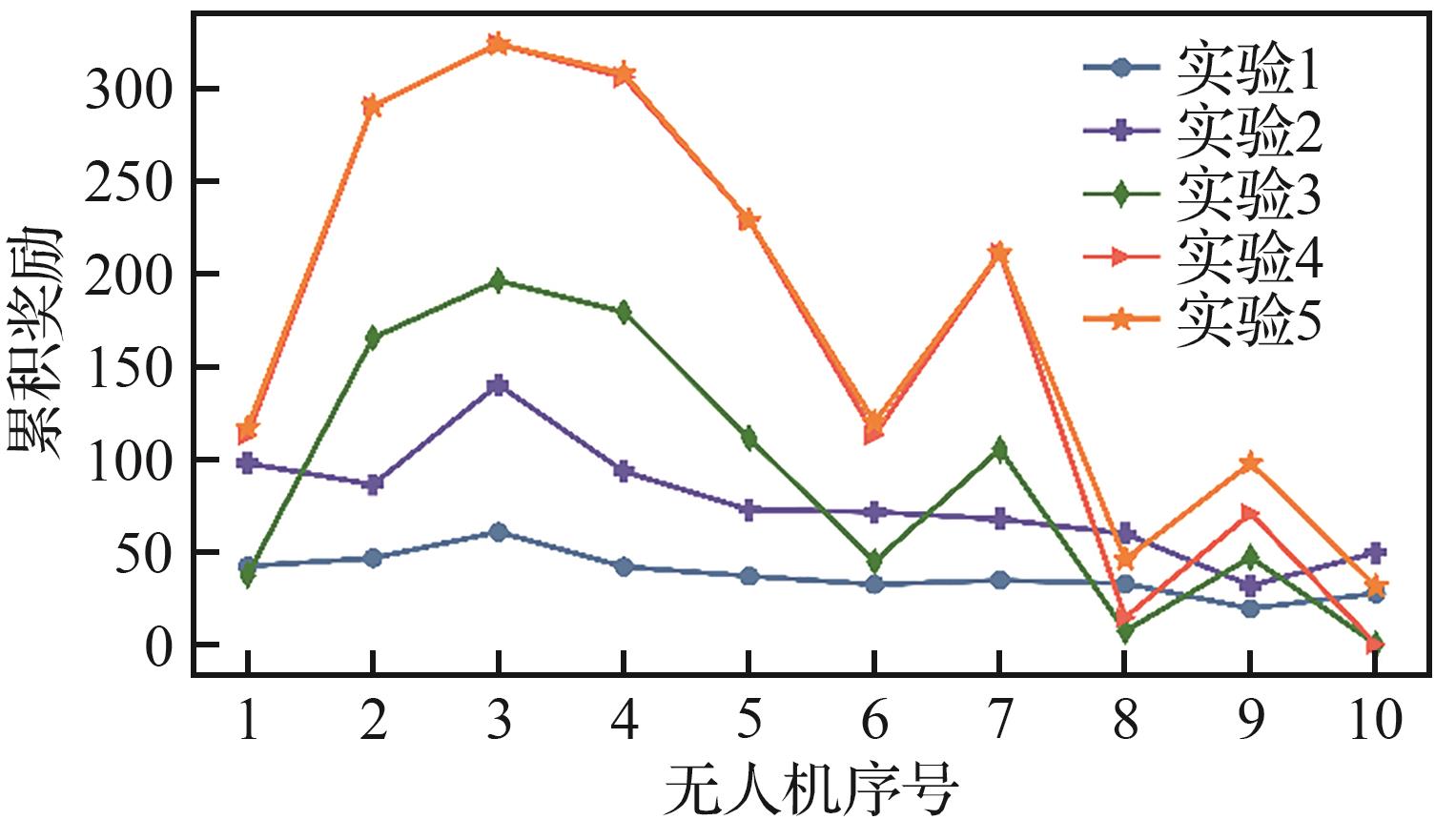
Fig.14
Comparison of reinforcement learning methods and the staged methods in the aggregate cumulative rewards across all UAVs
| [1] | PENG G Z, XIA Y X, ZHANG X J, et al. UAV-aided networks for emergency communications in areas with unevenly distributed users[C]∥2018 IEEE International Conference on Communication Systems (ICCS). Piscataway: IEEE Press, 2018: 25-29. |
| [2] | SAADI A AIT, SOUKANE A, MERAIHI Y, et al. UAV path planning using optimization approaches: A survey[J]. Archives of Computational Methods in Engineering, 2022, 29(6): 4233-4284. |
| [3] | 庞磊, 曹志强, 喻俊志. 基于A*和TEB融合的行人感知无碰跟随方法[J]. 航空学报, 2021, 42(4): 524909. |
| PANG L, CAO Z Q, YU J Z. A pedestrian-aware collision-free following approach for mobile robots based on A* and TEB[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524909 (in Chinese). | |
| [4] | REN Z Q, RATHINAM S, LIKHACHEV M, et al. Multi-objective path-based D* lite[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 3318-3325. |
| [5] | HUANG H X, SHANG Y X, LIU X F, et al. An improved Bi-RRT*-based path planning algorithm with adaptive search strategy assignment mechanism for ultra-low-altitude penetration of fixed-wing aircraft[J]. Aerospace Science and Technology, 2024, 152: 109363. |
| [6] | 符歆国, 关成启, 杨婷, 等. 基于改进RRT*的RLV在线再入轨迹规划算法[J]. 飞控与探测, 2025, 8(1): 57-66. |
| FU X G, GUAN C Q, YANG T, et al. Online re-entry trajectory planning algorithm for reusable launch vehicle based on improved RRT* [J]. Flight Control & Detection, 2025, 8(1): 57-66 (in Chinese). | |
| [7] | YANG H X, XU X M, HONG J C. Automatic parking path planning of tracked vehicle based on improved A* and DWA algorithms[J]. IEEE Transactions on Transportation Electrification, 2023, 9(1): 283-292. |
| [8] | SHENG H L, ZHANG J, YAN Z Y, et al. New multi-UAV formation keeping method based on improved artificial potential field[J]. Chinese Journal of Aeronautics, 2023, 36(11): 249-270. |
| [9] | 王羿, 叶辉, 杨晓飞. 基于无源性与势场法的四旋翼避障与位置控制[J]. 航空学报, 2023, 44(S1): 727492. |
| WANG Y, YE H, YANG X F. A position control and obstacle avoidance method for quadrotor via approach based on passivity and artificial potential filed[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727492. | |
| [10] | SHIN Y, KIM E. Hybrid path planning using positioning risk and artificial potential fields[J]. Aerospace Science and Technology, 2021, 112: 106640. |
| [11] | 于全友, 徐止政, 段纳, 等. 基于改进ACO的带续航约束无人机全覆盖作业路径规划[J]. 航空学报, 2023, 44(12): 327856. |
| YU Q Y, XU Z Z, DUAN N, et al. Coverage operation path planning of UAV with endurance constraints based on improved ACO[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(12): 327856 (in Chinese). | |
| [12] | LI Y P, ZHANG L X, CAI B, et al. Unified path planning for composite UAVs via Fermat point-based grouping particle swarm optimization[J]. Aerospace Science and Technology, 2024, 148: 109088. |
| [13] | JIANG W, LYU Y X, LI Y F, et al. UAV path planning and collision avoidance in 3D environments based on POMPD and improved grey wolf optimizer[J]. Aerospace Science and Technology, 2022, 121: 107314. |
| [14] | 周彬, 郭艳, 李宁, 等. 基于导向强化Q学习的无人机路径规划[J]. 航空学报, 2021, 42(9): 325109. |
| ZHOU B, GUO Y, LI N, et al. Path planning of UAV using guided enhancement Q-learning algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(9): 325109 (in Chinese). | |
| [15] | SCHLICHTING M R, NOTTER S, FICHTER W. Long short-term memory for spatial encoding in multi-agent path planning[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(5): 952-961. |
| [16] | 魏瑶, 刘小毛, 张晗, 等. 基于DDPG的单目无人机避障算法[J]. 飞控与探测, 2023, 6(3): 52-62. |
| WEI Y, LIU X M, ZHANG H, et al. Obstacle avoidance algorithm for monocular UAV based on DDPG[J]. Flight Control & Detection, 2023, 6(3): 52-62 (in Chinese). | |
| [17] | 谭富威, 何永宁, 孙晓晖, 等. 基于深度强化学习的飞行器过载和姿态智能控制研究[J]. 飞控与探测, 2025, 8(1): 25-31. |
| TAN F W, HE Y N, SUN X H, et al. Intelligent control of aircraft overload and attitude based on deep reinforcement learning[J]. Flight Control & Detection, 2025, 8(1): 25-31 (in Chinese). | |
| [18] | ZHANG S W, ZENG Y, ZHANG R. Cellular-enabled UAV communication: A connectivity-constrained trajectory optimization perspective[J]. IEEE Transactions on Communications, 2019, 67(3): 2580-2604. |
| [19] | FONTANESI G, ZHU A D, ARVANEH M, et al. A transfer learning approach for UAV path design with connectivity outage constraint[J]. IEEE Internet of Things Journal, 2022, 10(6): 4998-5012. |
| [20] | WANG X Y, GURSOY M C. Learning-based UAV trajectory optimization with collision avoidance and connectivity constraints[J]. IEEE Transactions on Wireless Communications, 2021, 21(6): 4350-4363. |
| [21] | NGUYEN K K, DUONG T Q, DO-DUY T, et al. 3D UAV trajectory and data collection optimisation via deep reinforcement learning[J]. IEEE Transactions on Communications, 2022, 70(4): 2358-2371. |
| [22] | WANG X J, YI M J, LIU J, et al. Cooperative data collection with multiple UAVs for information freshness in the internet of things[J]. IEEE Transactions on Communications, 2023, 71(5): 2740-2755. |
| [23] | 张薇, 何若俊. 面向物联网数据收集的无人机自主路径规划[J]. 航空学报, 2024, 45(8): 329054. |
| ZHANG W, HE R J. Autonomous trajectory design for IoT data collection by UAV[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 329054 (in Chinese). | |
| [24] | WANG L, WANG K Z, PAN C H, et al. Deep reinforcement learning based dynamic trajectory control for UAV-assisted mobile edge computing[J]. IEEE Transactions on Mobile Computing, 2022, 21(10): 3536-3550. |
| [25] | ZHANG Y, MOU Z Y, GAO F F, et al. UAV-enabled secure communications by multi-agent deep reinforcement learning[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 11599-11611. |
| [26] | 雷耀麟, 丁文锐, 罗祎喆, 等. 无人机数据采集任务中的航迹与资源优化[J/OL]. 北京航空航天大学学报, (2023-10-19)[2025-01-15]. . |
| LEI Y L, DING W R, LUO Y Z, et al. Trajectory planning and resource allocation methods in UAV data collection missions[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2023-10-19)[2025-01-15]. (in Chinese). | |
| [27] | 胥彪, 赵琛钰, 李爽, 等. 基于深度强化学习的高超声速飞行器动态面控制方法[J]. 飞控与探测, 2023, 6(1): 15-23. |
| XU B, ZHAO C Y, LI S, et al. Dynamic surface control method for hypersonic vehicle based on deep reinforcement learning[J]. Flight Control & Detection, 2023, 6(1): 15-23 (in Chinese). | |
| [28] | BANACIA A S, BRIOSO J G, SAWADA H, et al. Experimental verification of ITU-R P.1411 as path loss prediction model for IEEE 802.11af[C]∥21st International Symposium on Wireless Personal Multimedia Communications (WPMC), 2018. |
| [29] | 王雪松, 王荣荣, 程玉虎. 基于表征学习的离线强化学习方法研究综述[J]. 自动化学报, 2024, 50(6): 1104-1128. |
| WANG X S, WANG R R, CHENG Y H. A review of offline reinforcement learning based on representation learning[J]. Acta Automatica Sinica, 2024, 50(6): 1104-1128 (in Chinese). | |
| [30] | YU C, VELU A, VINITSKY E, et al. The surprising effectiveness of PPO in cooperative, multi-agent games[C]∥36th Conference on Neural Information Processing Systems (NeurIPS 2022) Track on Datasets and Benchmarks,2022. |
| [31] | WU W, WANG Q, WU X L, et al. Joint offloading and resource allocation for scalable vehicular edge computing[C]∥2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall). Piscataway: IEEE Press, 2020. |
| [32] | SCHULMAN J, MORTIZ P, LEVINE S, et al. High-dimensional continuous control using generalized advantage estimation[DB/OL]. arXiv preprint:1506.02438,2021. |
| [1] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [2] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [3] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [4] | Min YANG, Guanjun LIU, Ziyuan ZHOU. Control of lunar landers based on secure reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630553-630553. |
| [5] | Xunliang YAN, Yuxuan YANG, Jiawei SHI, Peichen WANG. Rapid ascent-phase trajectory planning for near-optimal fuel consumption of RBCC vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 231876-231876. |
| [6] | Xunliang YAN, Peichen WANG, Yang GUO. Review of trajectory planning and guidance methods for entry glide maneuvering penetration [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331810-331810. |
| [7] | Jianye SUN, Dong YE, Yan XIAO. Active observation trajectory planning for non-cooperative spacecraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331587-331587. |
| [8] | Yu WANG, Zhipeng XIE, Yongjian TIAN, Guanglei MENG. Distributed UAV formation control with virtual structure guided reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331354-331354. |
| [9] | Wei CHEN, Lulu LI, Dong CHEN, Shaohui ZHANG, Yafei LI, Ke WANG, Yuanyuan JIN, Mingliang XU. Multi-aircraft cooperative decision-making methods driven by differentiated support demands for carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531274-531274. |
| [10] | Xudong CHEN, Qiqi CHEN, Yizhe LUO, Jiabao WANG, Mingliang XU. Dynamic parallel scheduling of heterogeneous carrier-based aircraft deck support operations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531329-531329. |
| [11] | Zheng WANG, Hua WANG, Keke CUI, Chaochao LI, Junnan LIU, Mingliang XU. Locally guided reinforcement learning for autonomous dispatching of carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531333-531333. |
| [12] | Wenhui LING, Chunhui MU, Lingcong NIE, Xian DU, Ximing SUN. Improved DDPG-based multipoint pressure distribution control of variable geometry scramjet combustor at wide range velocities [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 131092-131092. |
| [13] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [14] | Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879-530879. |
| [15] | Junzhi LI, Teng LONG, Jingliang SUN, Hongyu MIAO, Zhenlin ZHOU. Differential flatness-based spatial-temporal hierarchical trajectory planning for fixed-wing UAVs in urban environments [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531369-531369. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341