Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (15): 331568.doi: 10.7527/S1000-6893.2025.31568
• Electronics and Electrical Engineering and Control • Previous Articles
Lin CHEN1,2, Xiwen GU3, Zhiying CHEN1,2, Zhuo ZHANG1,2, Xiaoliang SUN1,2( )
)
Received:2024-11-25
Revised:2024-12-17
Accepted:2025-01-20
Online:2025-02-24
Published:2025-02-21
Contact:
Xiaoliang SUN
E-mail:alexander_sxl@nudt.edu.cn
Supported by:CLC Number:
Lin CHEN, Xiwen GU, Zhiying CHEN, Zhuo ZHANG, Xiaoliang SUN. High-precision monocular vision pose measurement for large distance span in carrier landing guidance[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331568.
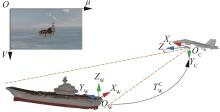
Fig.1
Diagram of relative pose measurement between aircraft and ship based on airborne monocular vision
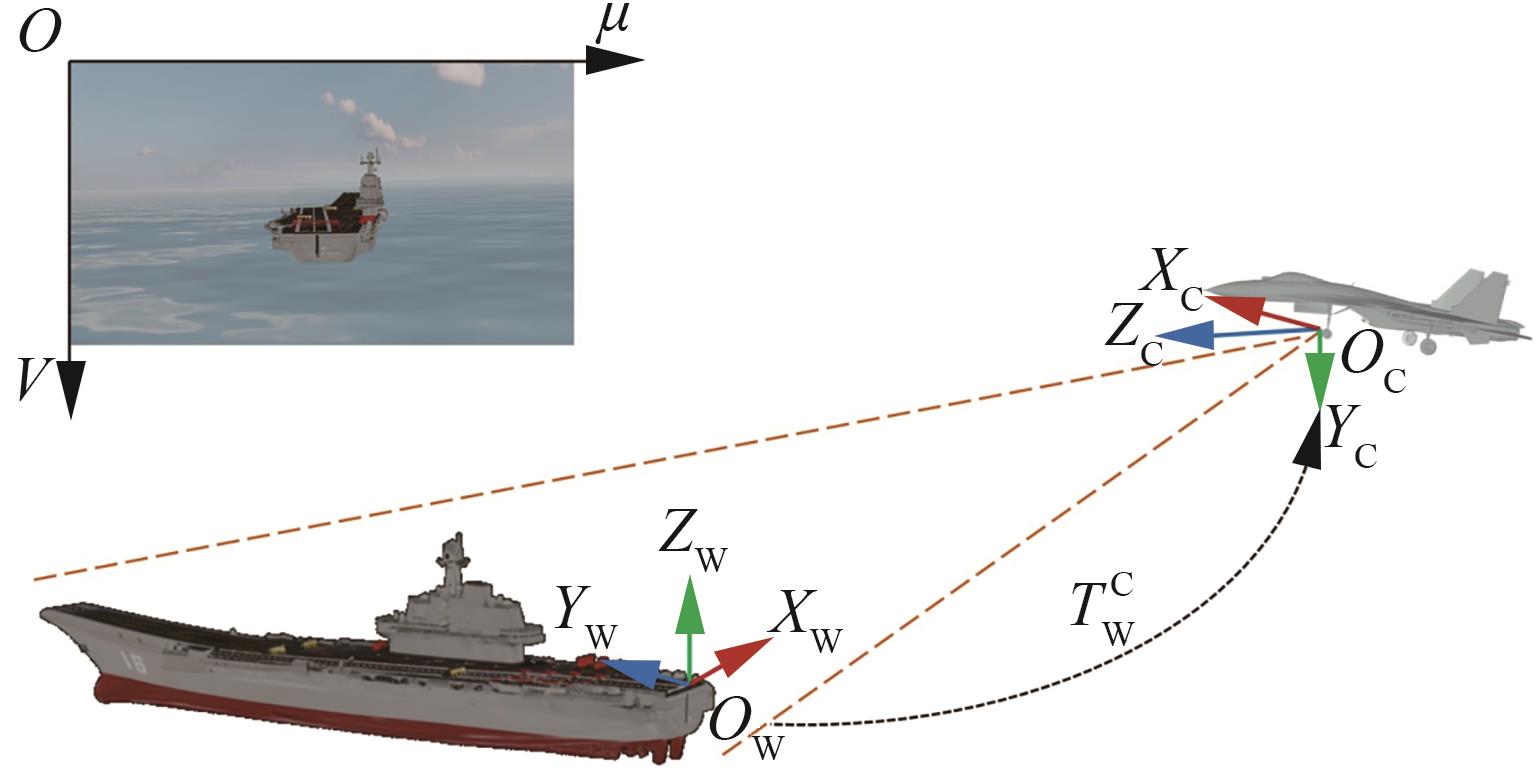

Fig.2
Sparse keypoint set repsentation of the ship


Fig.3
Keypoint detection performance at different input sizes
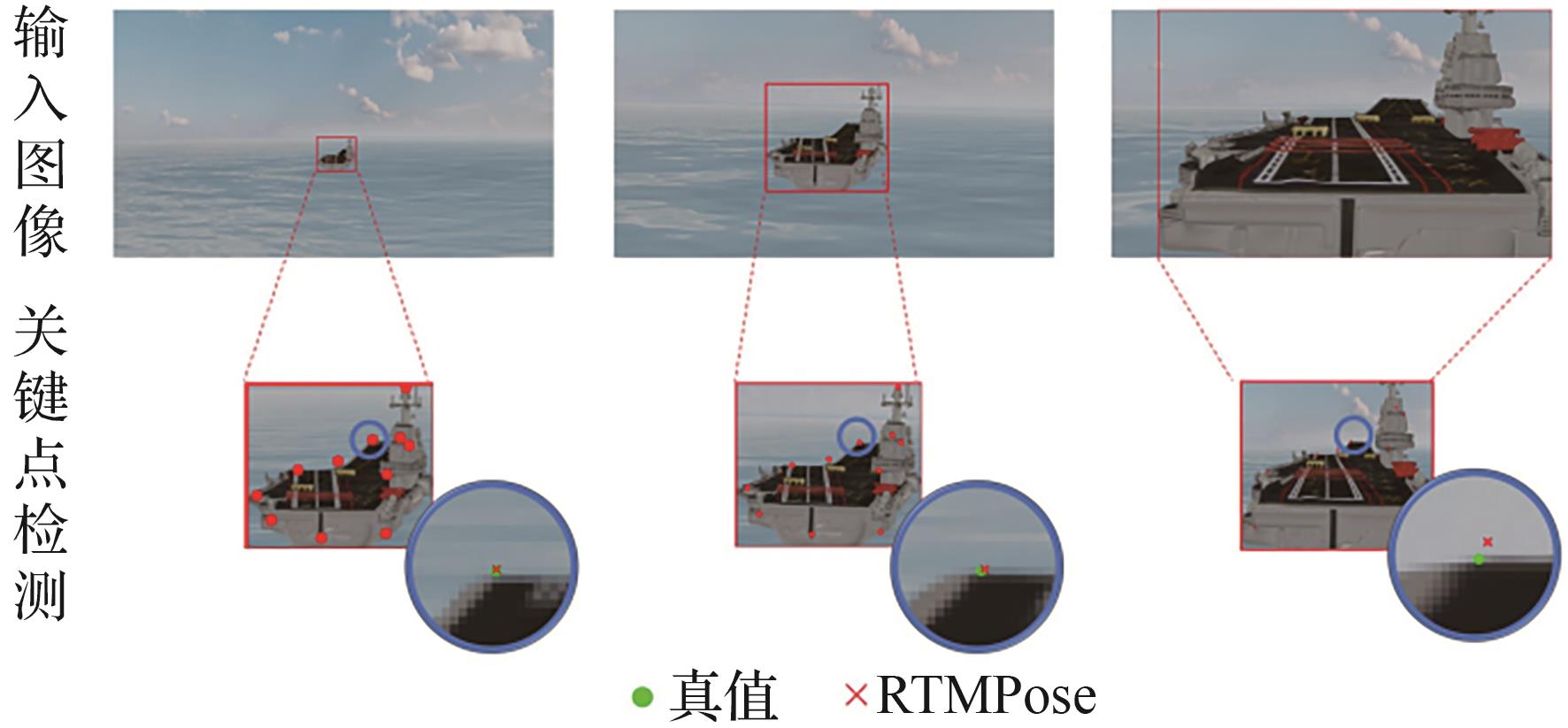
Fig.4
Keypoint detection error during aircraft landing
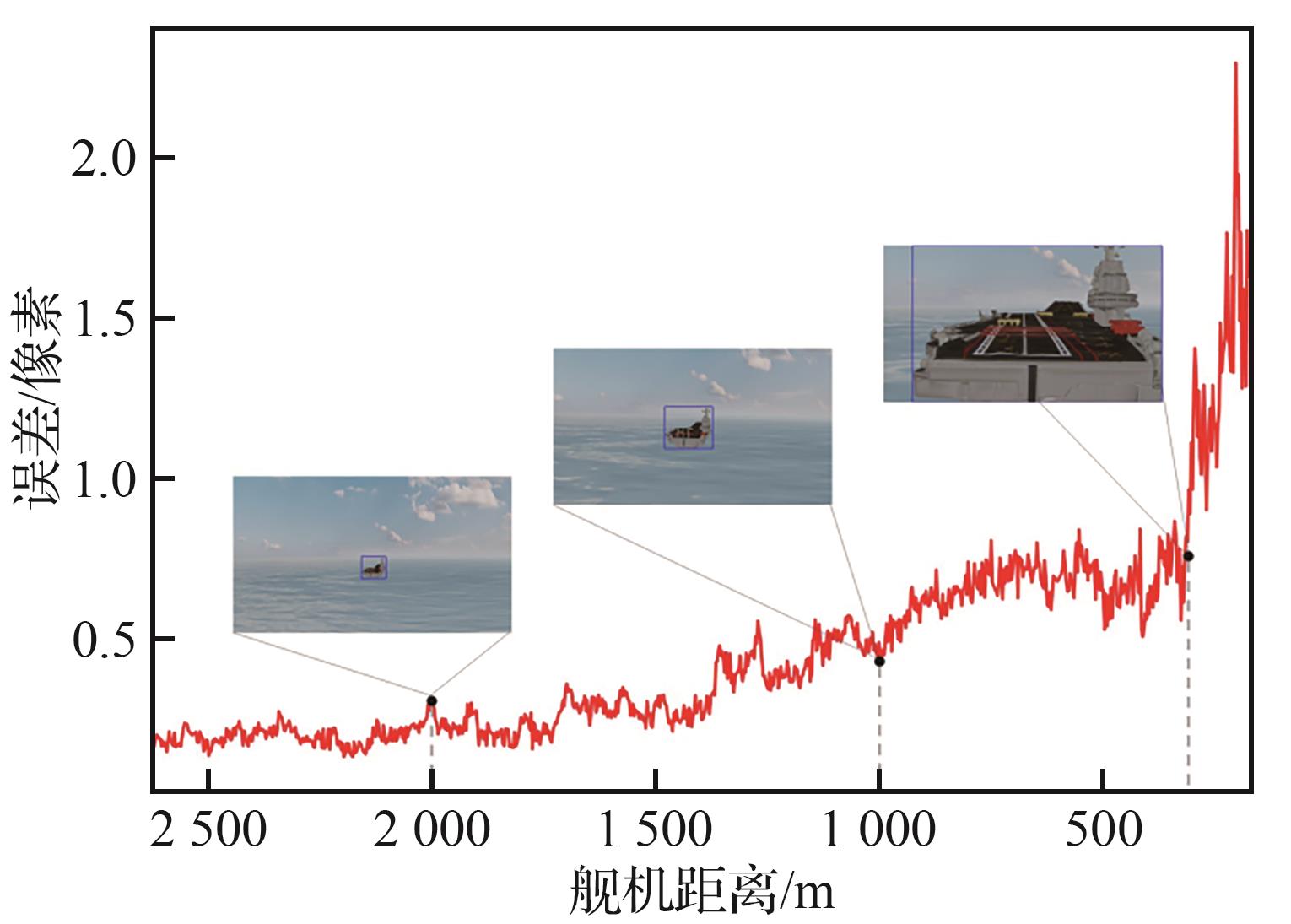
Table 1
RTMPose frame rate and floating point operations
| 方法 | 输入尺寸 | 帧率/(帧·s-1) | 浮点运算数/G |
|---|---|---|---|
| RTMPose | 256×256 | 95.39 | 5.508 |
| 384×384 | 83.25 | 12.385 | |
| 512×512 | 70.05 | 22.012 |
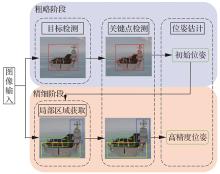
Fig.5
High-precision monocular vision pose measurement method for adapting to large distance variations in landing guidance
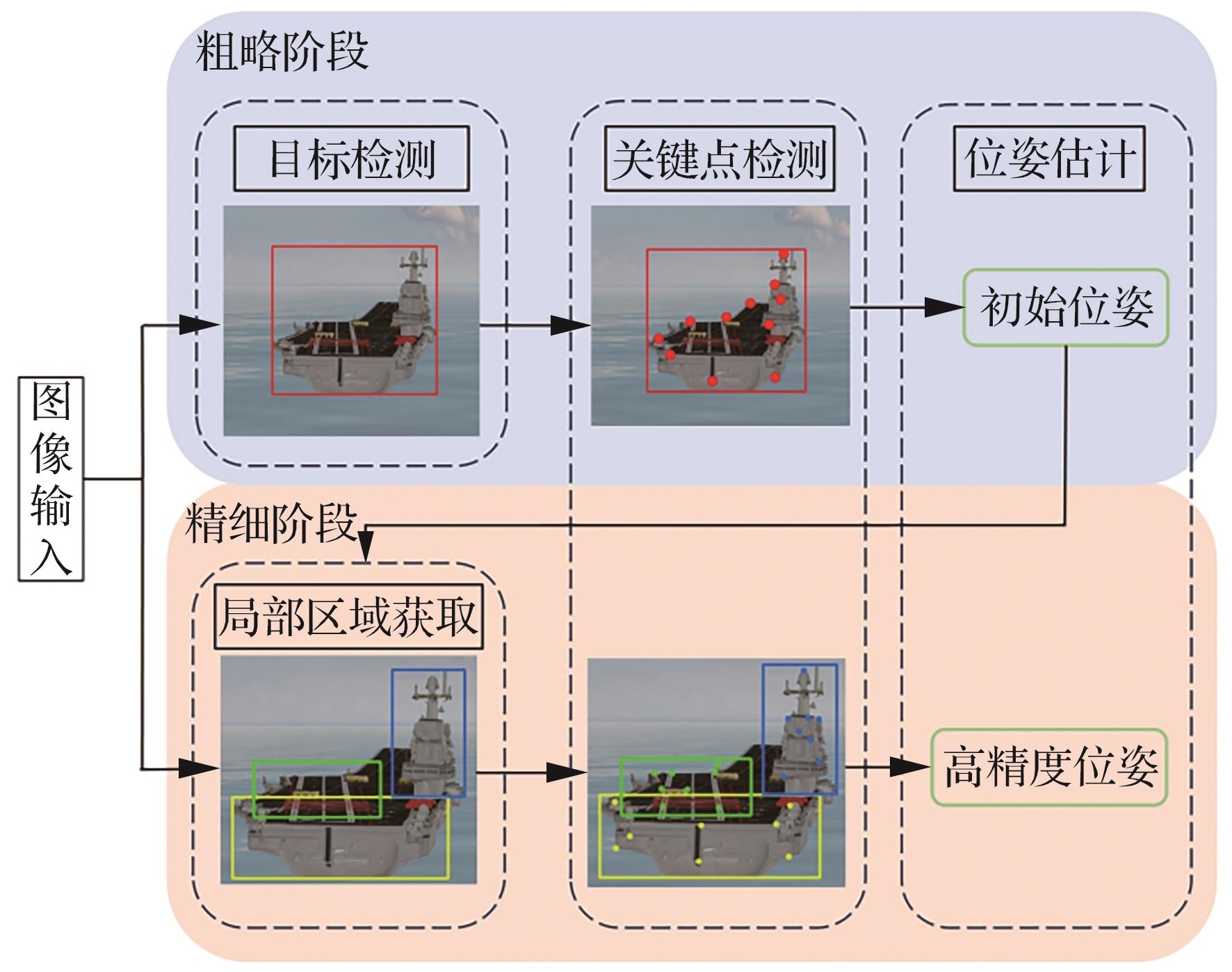

Fig.6
Sparse keypoint set presentation of the ship based on multiple components


Fig.7
Keypoint detection network structure
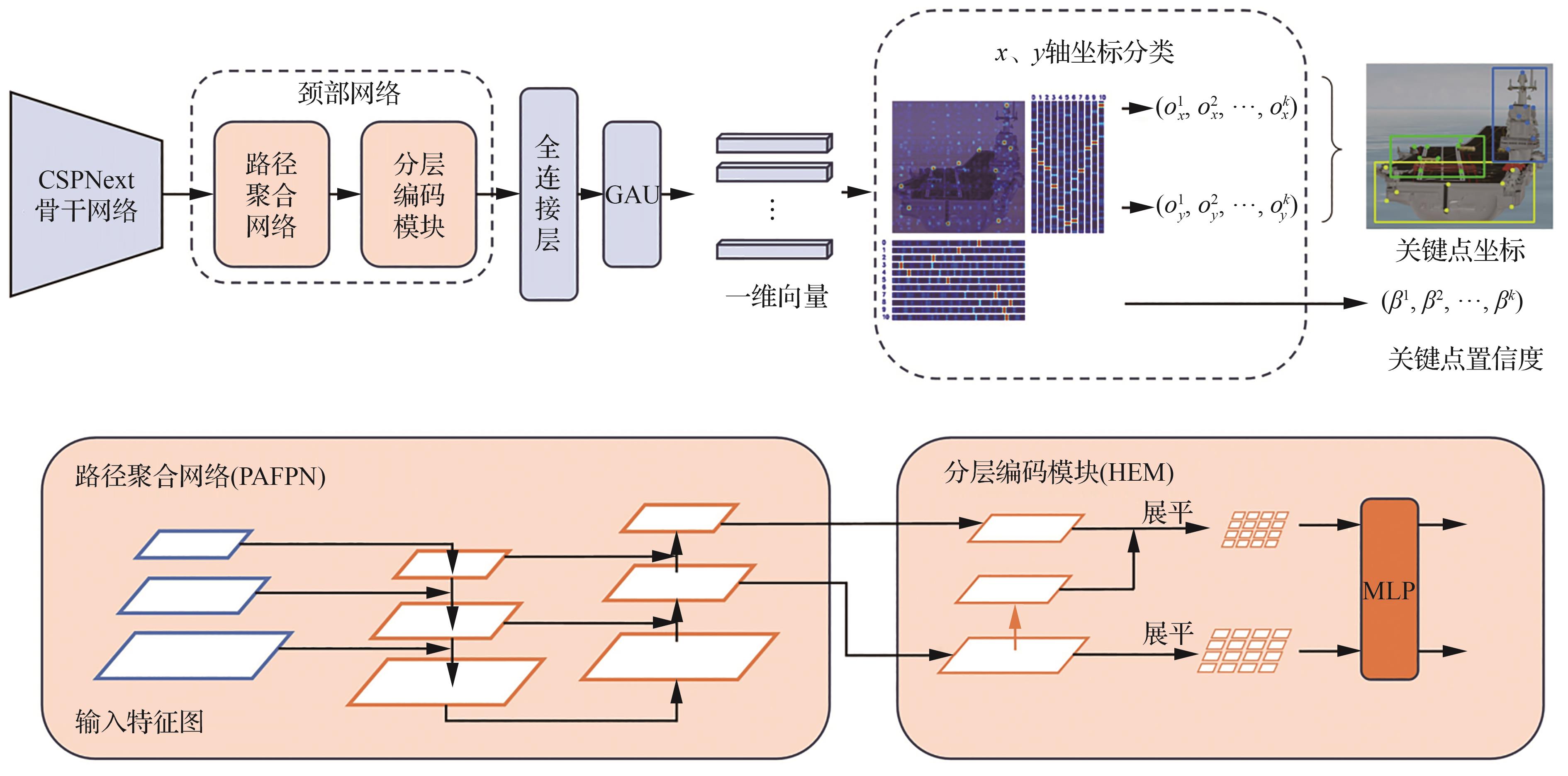
Table 2
Aircraft motion parameter configuration of test set
| 参数 | 俯仰/(°) | 偏航/(°) | 滚转/(°) | X/m | Y/m | Z/m |
|---|---|---|---|---|---|---|
| 周期/s | 6 | 5 | 3 | 5 | 4 | 4 |
| 初始值 | 11 | 0 | 0 | 0 | -2 600 | 218.7 |
| 扰动幅值 | 1 | 3 | 5 | 0~5 | 0~3 | 0~0.5 |
Fig.8
Aircraft motion trajectory of test set

Fig.9
Comparison of keypoint detection results in simulation experiments
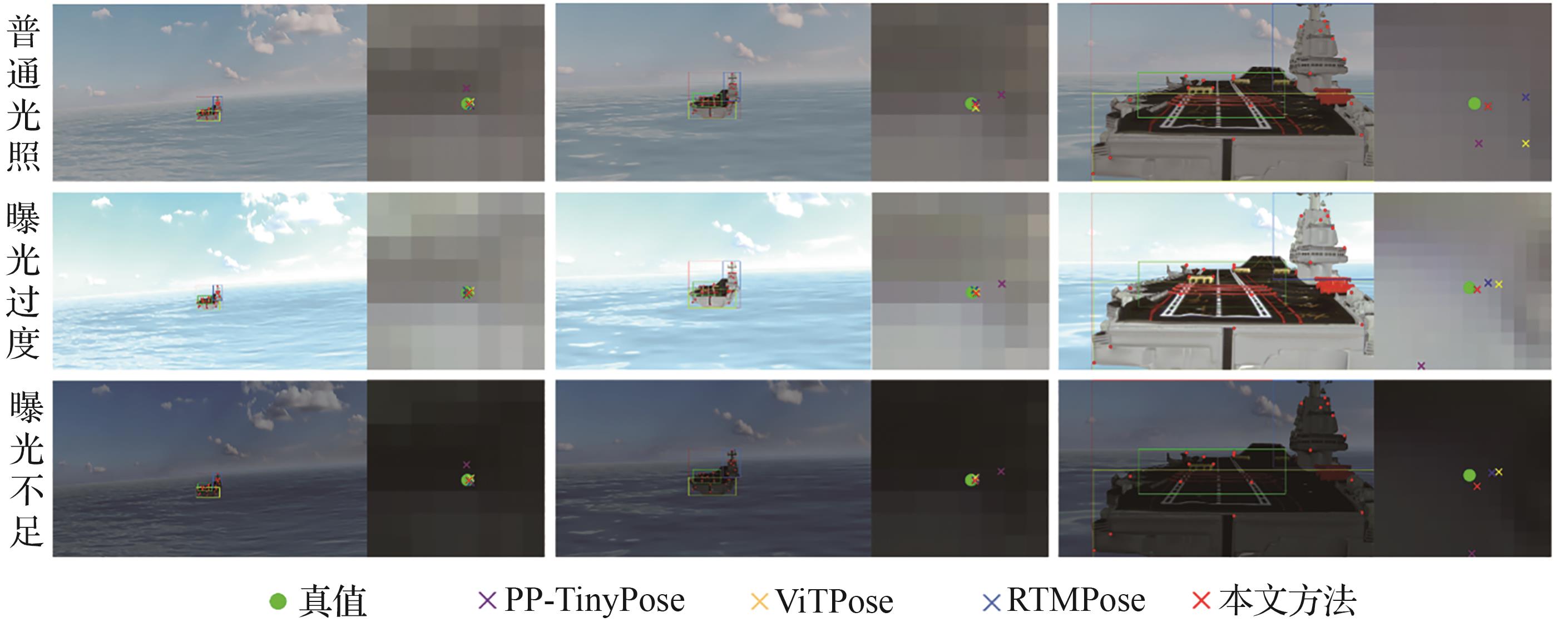
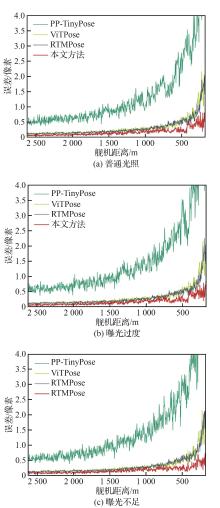
Fig.10
Comparison of keypoint detection errors under different lighting conditions
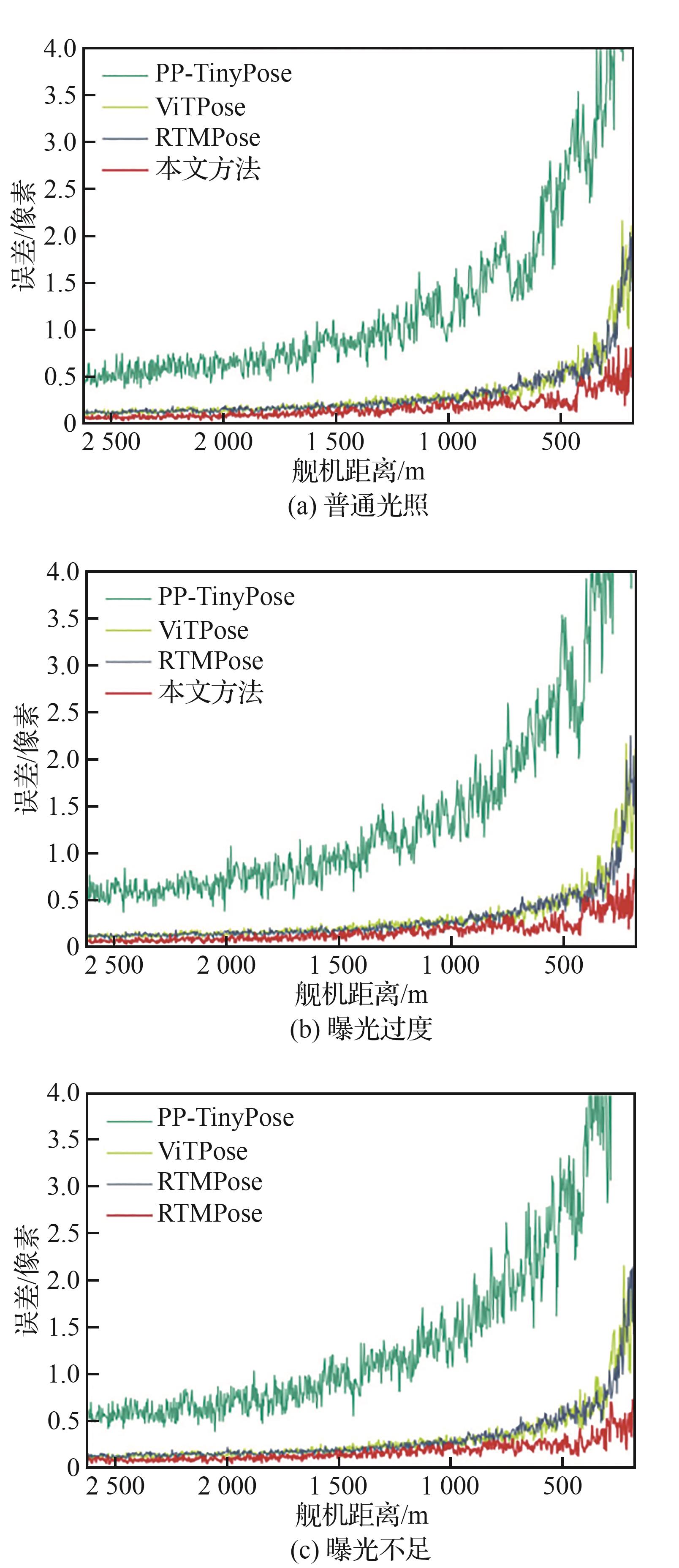
Table 3
Comparison of key point detection errors at different distance ranges
| 方法 | 平均误差/像素 | ||||
|---|---|---|---|---|---|
| >2.0 km | 1.0~2.0 km | 0.5~1.0 km | 0.2~0.5 km | <0.2 km | |
| PP-TinyPose | 0.55 | 0.80 | 1.56 | 2.83 | 4.69 |
| ViTPose | 0.12 | 0.19 | 0.49 | 0.61 | 1.30 |
| RTMPose | 0.16 | 0.24 | 0.43 | 0.55 | 1.21 |
| 本文方法 | 0.07 | 0.12 | 0.16 | 0.29 | 0.54 |
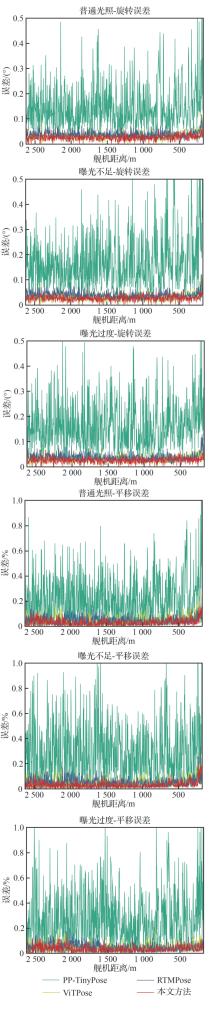
Fig.11
Comparison of pose estimation errors under different lighting conditions
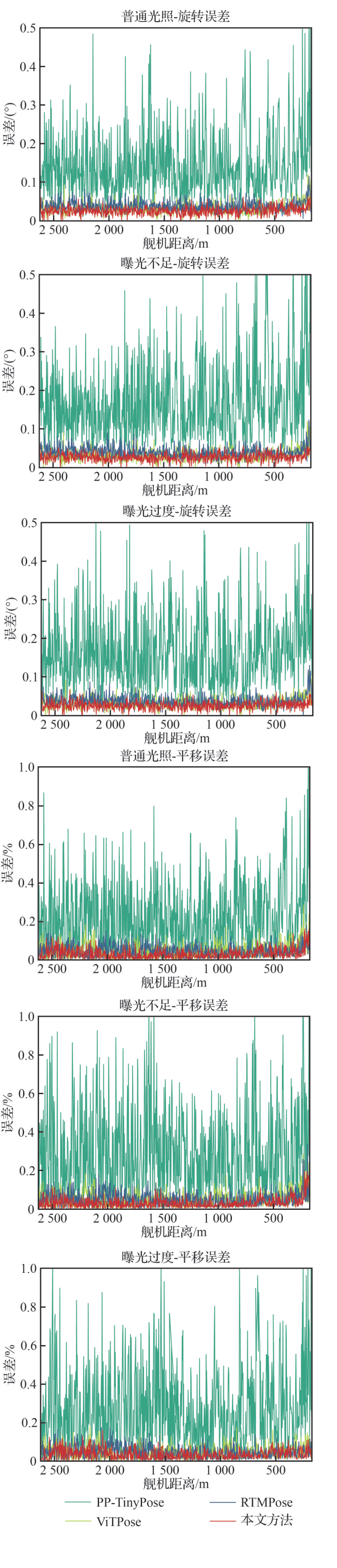

Fig.12
Gaussian noise test set
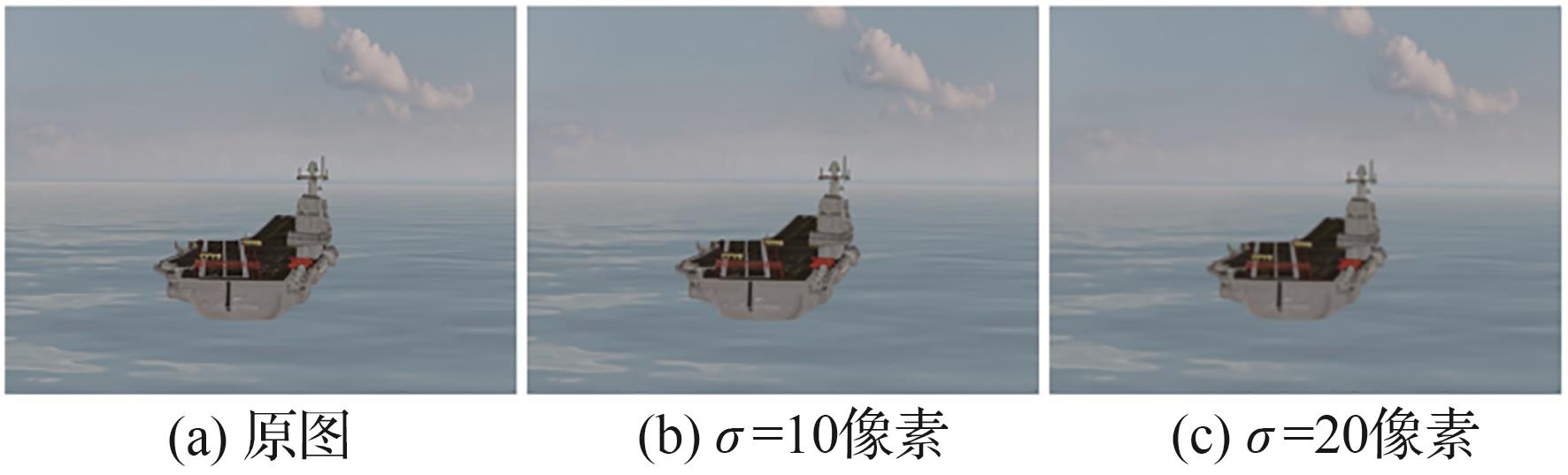
Fig.13
Keypoint detection error under Gaussian noise
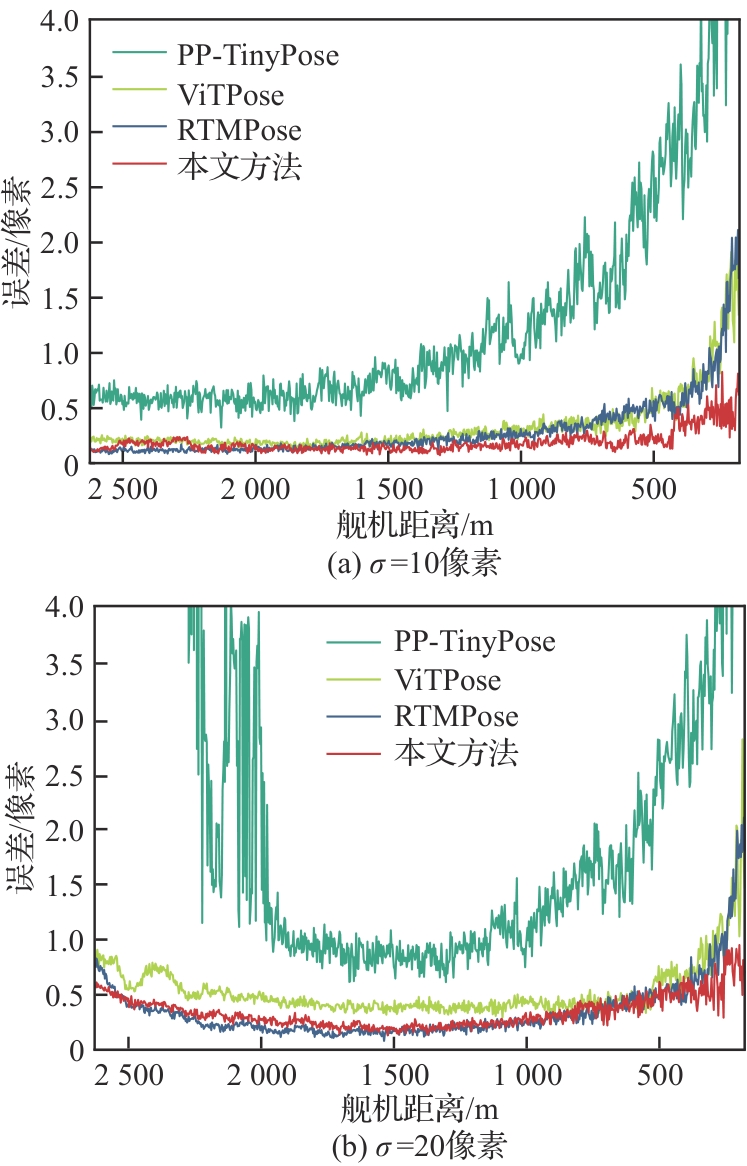
Table 4
Keypoint detection network ablation experiment
| 方法 | 平均误差/像素 | ||||
|---|---|---|---|---|---|
| >2.0 km | 1.0~2.0 km | 0.5~1.0 km | 0.2~0.5 km | <0.2 km | |
| 粗略阶段结果 | 0.16 | 0.25 | 0.42 | 0.55 | 1.10 |
| RTMPose | 0.10 | 0.14 | 0.28 | 0.35 | 0.59 |
| +PAFPN | 0.07 | 0.12 | 0.18 | 0.33 | 0.57 |
| +HEM | 0.08 | 0.13 | 0.17 | 0.30 | 0.54 |
| +PAFPN+HEM | 0.07 | 0.10 | 0.16 | 0.29 | 0.54 |
Fig.14
Hardware used in scaled physical experiment
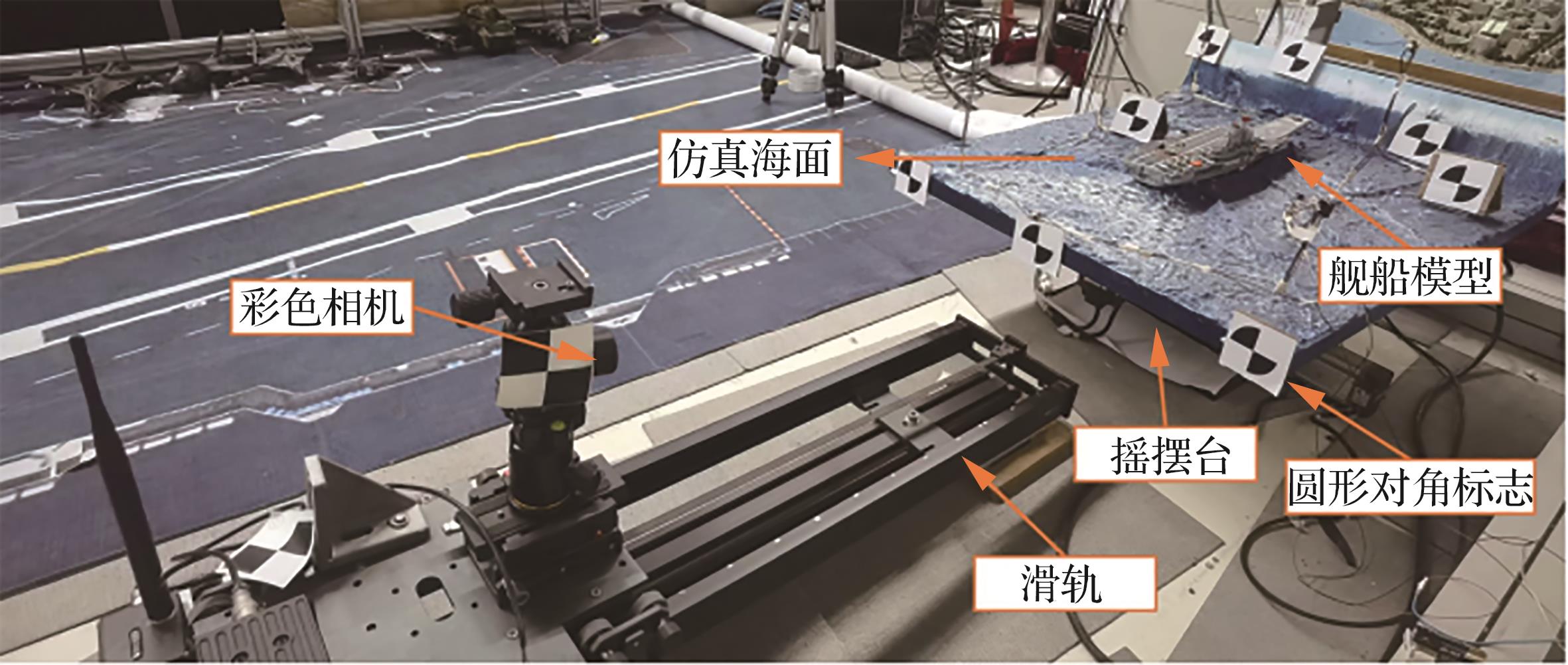

Fig.15
Comparison of keypoint detection in scaled physical experiments
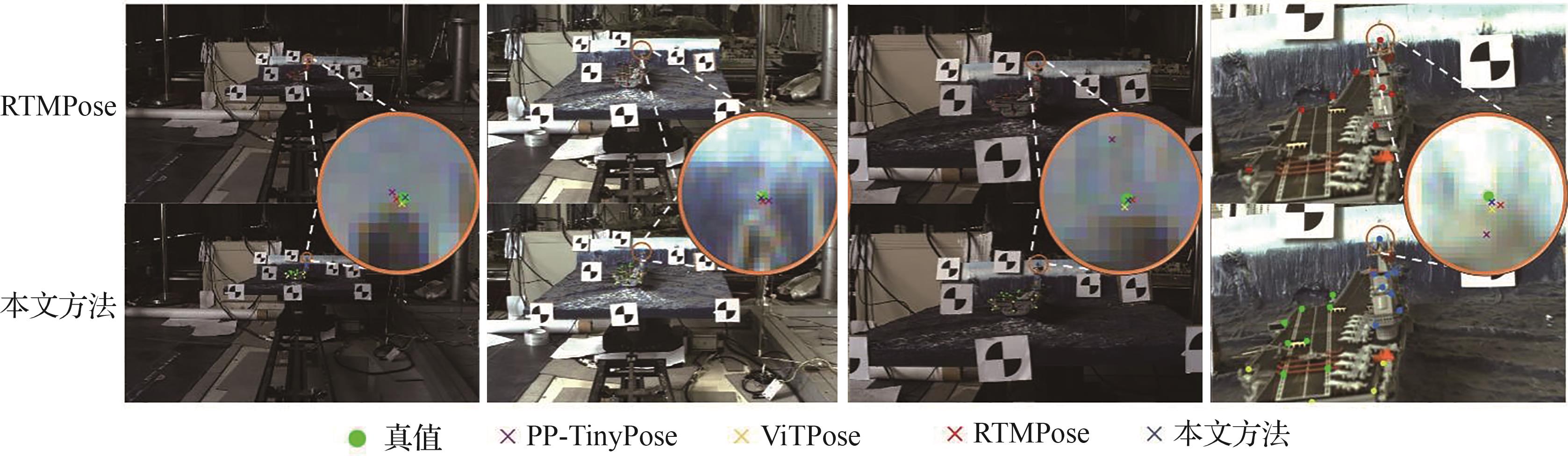
Fig.16
Scaled physical experiment keypoint detection error
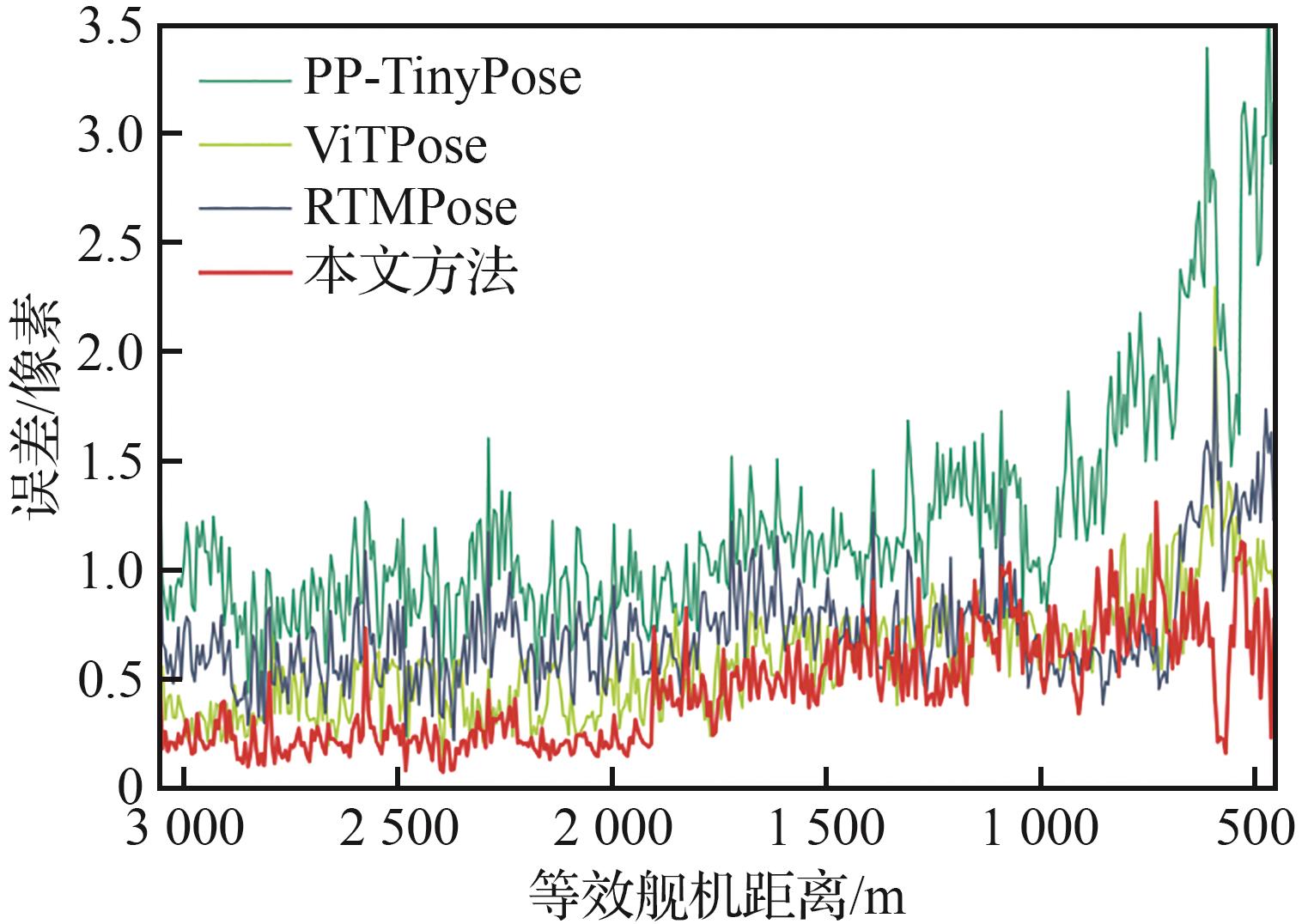
Table 5
Scaled physical experiment pose estimation error
| 方法 | |||
|---|---|---|---|
| PP-TinyPose | 1.21 | 0.43 | 0.71 |
| ViTPose | 0.59 | 0.29 | 0.40 |
| RTMPose | 0.72 | 0.30 | 0.47 |
| 本文方法 | 0.44 | 0.27 | 0.34 |
Table 6
Jetson AGX Xavier embedded platform parameters
| 参数 | 数值 |
|---|---|
| CPU | 8核Carmel ARMv8.2 64处理器 |
| GPU | 512核Volta架构 |
| 内存 | 32 GB |
| 储存 | 32 GB |
| 峰值算力 | 32 TOPS |
Table 7
Computational efficiency of the proposed method
| 方法 | 目标检测耗时/ms | 关键点检测耗时/ms | 位姿估计耗时/ms | 总耗时/ms |
|---|---|---|---|---|
| RTMPose | 9.2 | 20.8 | 1.8 | 31.8 |
| 本文方法 | 9.2 | 28.9 | 1.9 | 40.0 |
| [1] | WICKRAMASURIYA M, LEE T, SNYDER M. Deep monocular relative 6D pose estimation for ship-based autonomous UAV[C]∥AIAA SCITECH 2024 Forum. Reston: AIAA, 2024. |
| [2] | 胡小兵, 周大鹏, 曲晓雷. 国外舰载机全自动着舰技术综述[J]. 飞机设计, 2021, 41(2): 32-36. |
| HU X B, ZHOU D P, QU X L. Review on full automatic carrier landing technique of foreign shipboard aircraft[J]. Aircraft Design, 2021, 41(2): 32-36 (in Chinese). | |
| [3] | 甄子洋, 王新华, 江驹, 等. 舰载机自动着舰引导与控制研究进展[J]. 航空学报, 2017, 38(2): 020435. |
| ZHEN Z Y, WANG X H, JIANG J, et al. Research progress in guidance and control of automatic carrier landing of carrier-based aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(2): 020435 (in Chinese). | |
| [4] | 张志冰, 甄子洋, 江驹, 等. 舰载机自动着舰引导与控制综述[J]. 南京航空航天大学学报, 2018, 50(6): 734-744. |
| ZHANG Z B, ZHEN Z Y, JIANG J, et al. Review on development in guidance and control of automatic carrier landing of carrier-based aircraft[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2018, 50(6): 734-744 (in Chinese). | |
| [5] | 魏振忠. 舰载机着舰位姿视觉测量技术概述[J]. 测控技术, 2020, 39(8): 2-6. |
| WEI Z Z. Overview of visual measurement technology for landing position and attitude of carrier-based aircraft[J]. Measurement & Control Technology, 2020, 39(8): 2-6 (in Chinese). | |
| [6] | GUI Y, GUO P Y, ZHANG H L, et al. Airborne vision-based navigation method for UAV accuracy landing using infrared lamps[J]. Journal of Intelligent & Robotic Systems, 2013, 72(2): 197-218. |
| [7] | POLVARA R, SHARMA S, WAN J, et al. Towards autonomous landing on a moving vessel through fiducial markers[C]∥2017 European Conference on Mobile Robots (ECMR). Piscataway: IEEE Press, 2017: 1-6. |
| [8] | XU G L, QI X P, ZENG Q H, et al. Use of Land’s cooperative object to estimate UAV’s pose for autonomous landing[J]. Chinese Journal of Aeronautics, 2013, 26(6): 1498-1505. |
| [9] | SHI F H, ZHANG X Y, LIU Y C. A new method of camera pose estimation using 2D-3D corner correspondence[J]. Pattern Recognition Letters, 2004, 25(10): 1155-1163. |
| [10] | ZHOU L P, KOPPEL D, KAESS M. A complete, accurate and efficient solution for the perspective-N-line problem[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 699-706. |
| [11] | 毕道明, 黄辉, 范静, 等. 视觉着舰中非合作结构化特征匹配算法[J]. 南京航空航天大学学报, 2021, 53(3): 395-401. |
| BI D M, HUANG H, FAN J, et al. Non-cooperative structural feature matching algorithm in visual landing[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2021, 53(3): 395-401 (in Chinese). | |
| [12] | 王秋富, 石治国, 张倬, 等. 舰载机着舰引导中鲁棒单目视觉相对位姿测量[J]. 航空学报, 2024, 45 (23): 330309. |
| WANG Q F, SHI Z G, ZHANG Z, et al. Robust monocular relative pose measurement for carrier-based aircraft landing guidance[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45 (23): 330309 (in Chinese). | |
| [13] | SUN X L, ZHANG Z, LIU J, et al. Visual pose measurement for automatic landing on an aircraft carrier[C]∥2022 IEEE International Conference on Unmanned Systems (ICUS). Piscataway: IEEE Press, 2022: 891-895. |
| [14] | ZHANG Z, WANG Q F, BI D M, et al. MC-LRF based pose measurement system for shipborne aircraft automatic landing[J]. Chinese Journal of Aeronautics, 2023, 36(8): 298-312. |
| [15] | WICKRAMASURIYA M, LEE T, SNYDER M. Deep transformer network for monocular pose estimation of ship-based UAV[DB/OL]. arXiv preprint: 2406.09260, 2024. |
| [16] | YU G H, CHANG Q Y, LV W Y, et al. PP-PicoDet: A better real-time object detector on mobile devices[DB/OL]. arXiv preprint: 2111.00902, 2021. |
| [17] | JIANG T, LU P, ZHANG L, et al. RTMPose: real-time multi-person pose estimation based on MMPose[DB/OL]. arXiv preprint: 2303.07399, 2023. |
| [18] | FISCHLER M A, BOLLES R C. Random sample consensus[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [19] | LEPETIT V, MORENO-NOGUER F, FUA P. EPnP: An accurate O(n) solution to the PnP problem[J]. International Journal of Computer Vision, 2009, 81(2): 155-166. |
| [20] | LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 8759-8768. |
| [21] | RAZAVI A, VAN DEN OORD A, VINYALS O. Generating diverse high-fidelity images with VQ-VAE-2[DB/OL]. arXiv preprint: 1906.00446, 2019. |
| [22] | LI Y J, YANG S, LIU P D, et al. SimCC: A simple coordinate classification perspective for human pose estimation[M]∥Computer Vision-ECCV 2022. Cham: Springer Nature Switzerland, 2022: 89-106. |
| [23] | GitHub. MMPose: OpenMMlab pose estimation toolbox and benchmark[DB/OL]. . |
| [24] | PaddlePaddle. Object detection and instance segmentation toolkit based on PaddlePaddle[DB/OL]. (2024-12-05)[2025-01-08]. . |
| [25] | XU Y F, ZHANG J, ZHANG Q M, et al. ViTPose: Simple vision transformer baselines for human pose estimation[J]. Advances in Neural Information Processing Systems, 2022, 35: 38571-38584. |
| [26] | GUO L C, CHEN L, WANG Q F, et al. Joint optimization of the 3D model and 6D pose for monocular pose estimation[J]. Drones, 2024, 8(11): 626. |
| [27] | DENNINGER M, SUNDERMEYER M, WINKELBAUER D, et al. BlenderProc[DB/OL]. arXiv preprint: 1911.01911, 2019. |
| [1] | Jianyu XU, Li ZHOU, Zhanxue WANG, Jie SHI, Hao SHI. Calculation method for hypersonic plume infrared radiation based on a fast line-by-line calculation model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 630778-630778. |
| [2] | Lingjie MENG, Hongguang LI, Xinjun LI. SAR image simulation method guided by geomorphic category information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(7): 331003-331003. |
| [3] | Zhihao ZHAO, Zhaohua YANG, Yun WU, Yuanjin YU. Single-photon counting imaging denoising method based on deep learning in low-light environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630531-630531. |
| [4] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [5] | Ligong LI, Chao ZHANG, Jingting SU. Distributed fusion technology for multi-source landing guidance information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531461-531461. |
| [6] | Qiufu WANG, Daoming BI, Zhuo ZHANG, Xiaoliang SUN, Qifeng YU. Onboard visual-inertial relative pose and deck motion easurement for autonomous landing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531268-531268. |
| [7] | Qijun LI, Kaikai CUI. Redundancy design and analysis of automatic carrier landing guidance system [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531743-531743. |
| [8] | Zhibing ZHANG, Ziyang ZHEN. Research progress on guidance and control of fixed-wing manned and unmanned carrier-based aircraft landing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 532336-532336. |
| [9] | Bin SUN, Hang YOU, Wenbo LI, Xiangrui LIU, Jiayi MA. Dual-band payload image fusion and its applications in low-altitude remote sensing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531343-531343. |
| [10] | Fanteng MENG, Yong QIN, Jing CUI, Yunpeng WU, Zicheng ZHANG, Shaowei WEI. Unknown risk detection in external environment of railroad using UAV images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531262-531262. |
| [11] | Weishi CHEN, Hongchuang NIU, Xin WANG, Jian WAN, Xianfeng LU, Jie ZHANG, Qingbin WANG. Review on multi-source detection technologies for birds and drones in airport clearance area [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 31251-031251. |
| [12] | Jie LIN, Zhigong TANG, Weiqi QIAN, Yueqing WANG, Peng ZHANG, Weixia XU, Jie LIU. Research progress and prospects of aircraft aerodynamic design based on generative models [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 631679-631679. |
| [13] | Yonghai WANG, Haoge LI, Jiaxin LI, Yi DUAN, Chuan TIAN, Lingxi GUO, Xusheng WU. Rapid aircraft shape generation based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 631614-631614. |
| [14] | Jiaqi LIU, Rongqian CHEN, Jinhua LOU, Xu HAN, Hao WU, Yancheng YOU. Aerodynamic shape optimization of high-speed helicopter rotor airfoil based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529828-529828. |
| [15] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341