Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (15): 331503.doi: 10.7527/S1000-6893.2024.31503
• Electronics and Electrical Engineering and Control • Previous Articles
Shan HUANG1, Jingping SHI1,2, Qi ZHU1, Yongxi LYU1,2( ), Xiaobo QU1,2
), Xiaobo QU1,2
Received:2024-11-06
Revised:2024-12-05
Accepted:2025-01-03
Online:2025-01-07
Published:2025-01-07
Contact:
Yongxi LYU
E-mail:yongxilyu@nwpu.edu.cn
Supported by:CLC Number:
Shan HUANG, Jingping SHI, Qi ZHU, Yongxi LYU, Xiaobo QU. Prescribed-time incremental backstepping fault-tolerant control for wing-damaged aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331503.
Fig.1
Variation in aircraft aerodynamic forces and moment coefficients under normal and damage conditions
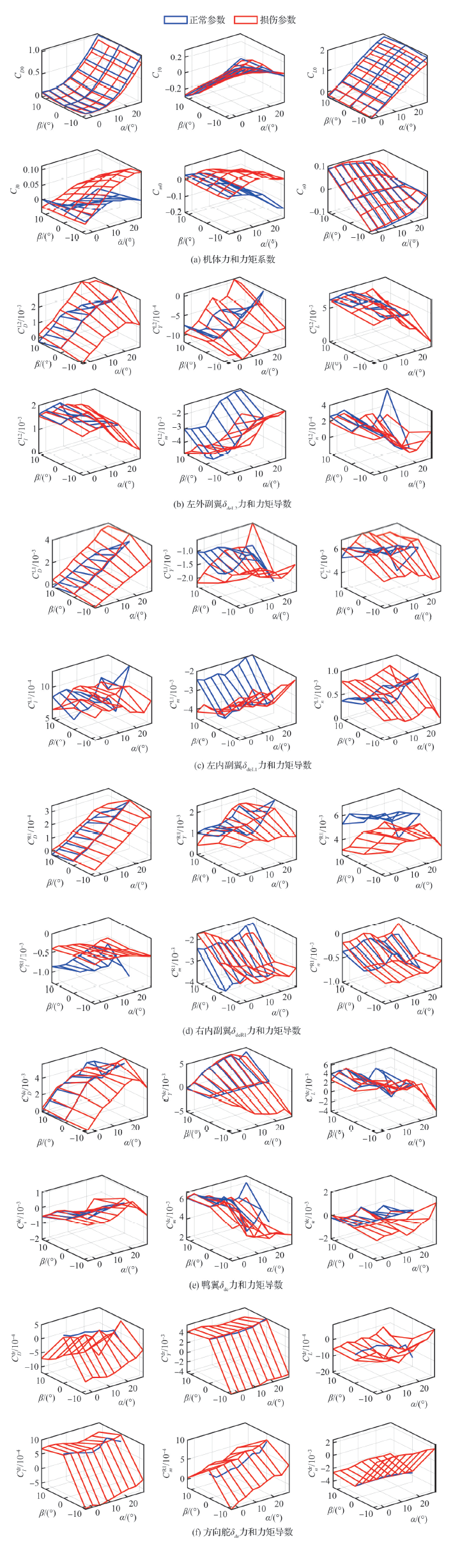
Table 1
Variation of parameters of wing-damaged aircraft
| 参数 | 数值 |
|---|---|
| 质量 | -1.7 |
| 展长 | -0.438 |
| 机翼面积 | -0.198 |
| 纵向重心位置Δx/m | 0.27 |
| 横向重心位置Δy/m | -0.32 |
| 立向重心位置Δz/m | -0.01 |

Fig.2
Architecture of the prescribed-time attitude fault-tolerant control algorithm
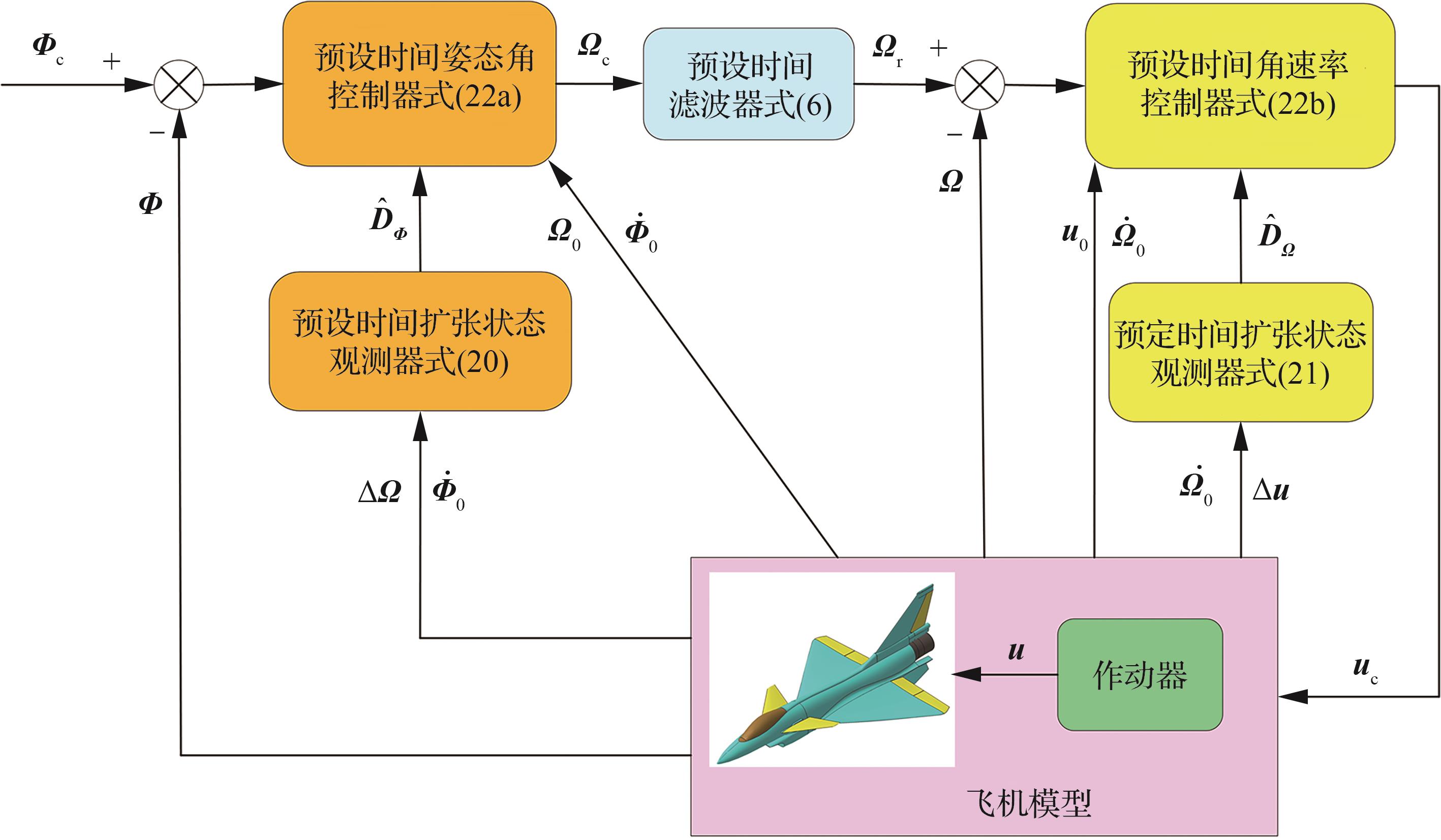
Fig.3
Aircraft model
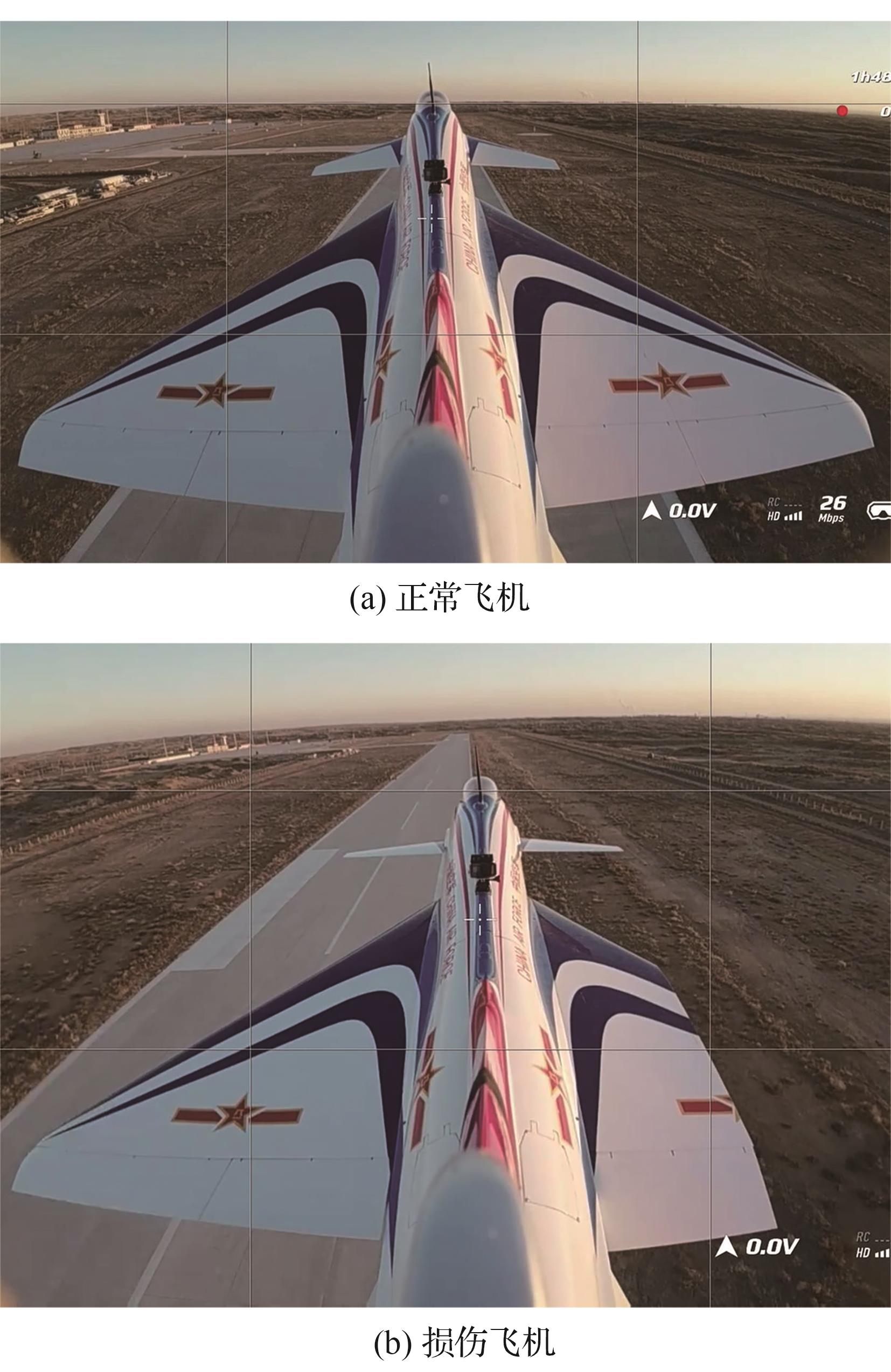
Table 2
Proposed algorithm and its parameters
| 算法 | 参数 |
|---|---|
| 滤波器式(6) | |
| 控制器式(9a) | |
| 控制器式(9b) | |
| 观测器式(20) | |
| 观测器式(21) |
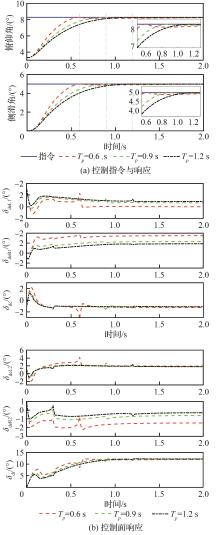
Fig.4
Commands and responses of the normal aircraft at different prescribed time
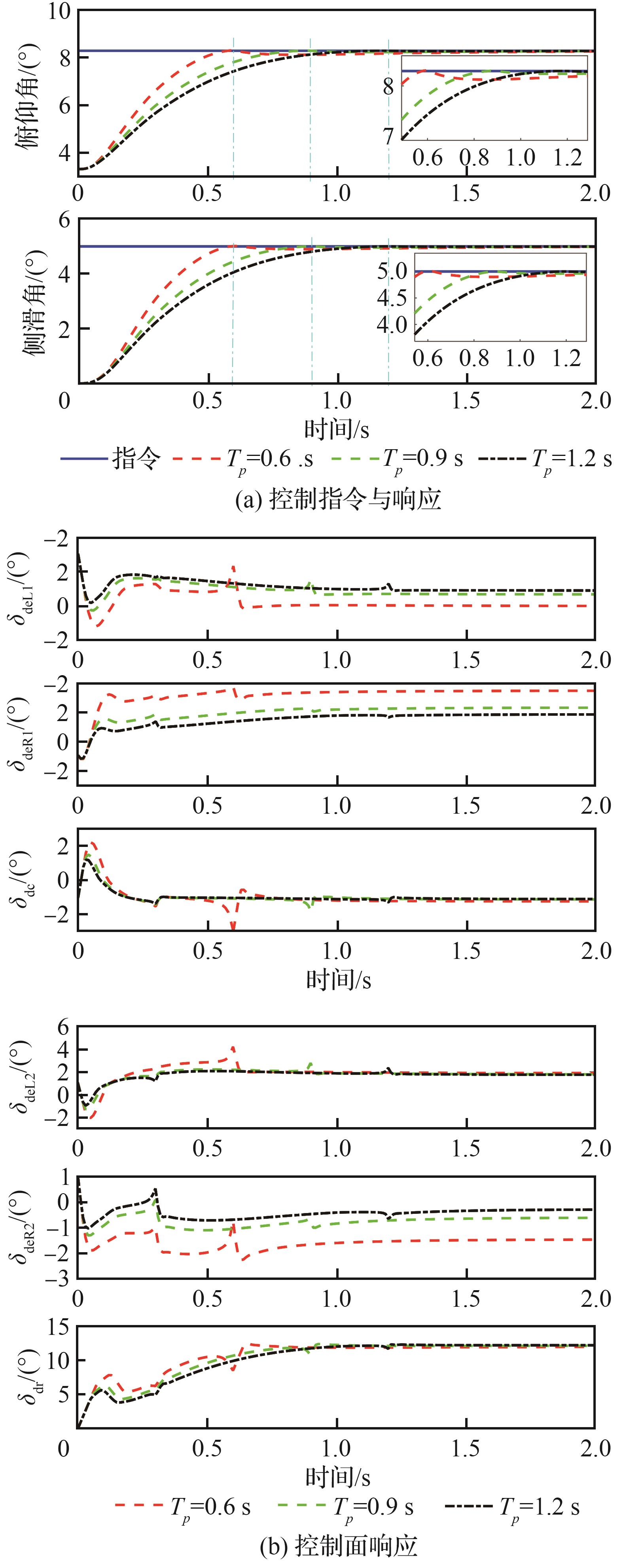
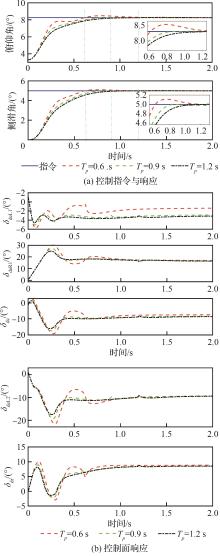
Fig.5
Commands and responses of the wing-damaged aircraft at different prescribed time
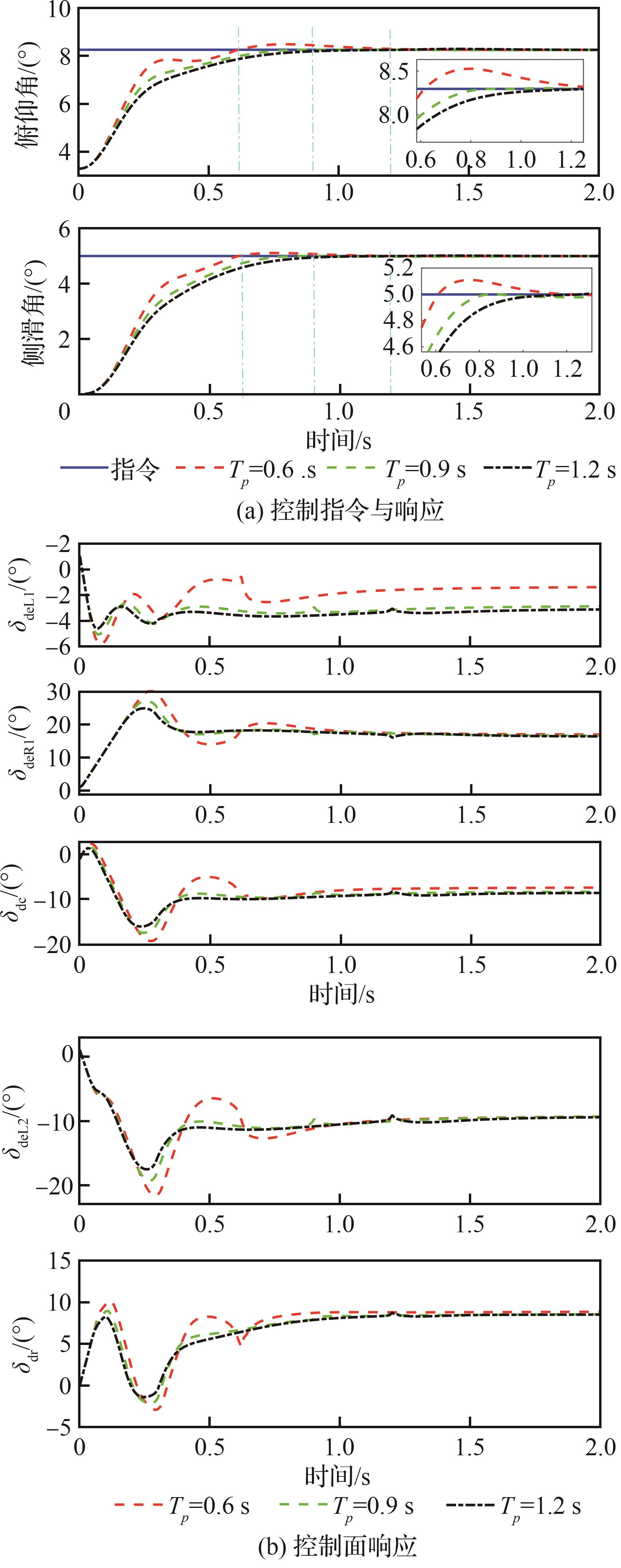
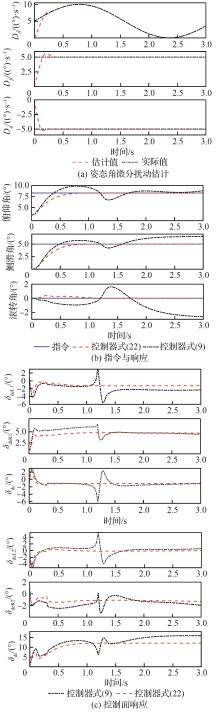
Fig.6
Aircraft response under disturbance of attitude angle differential signal
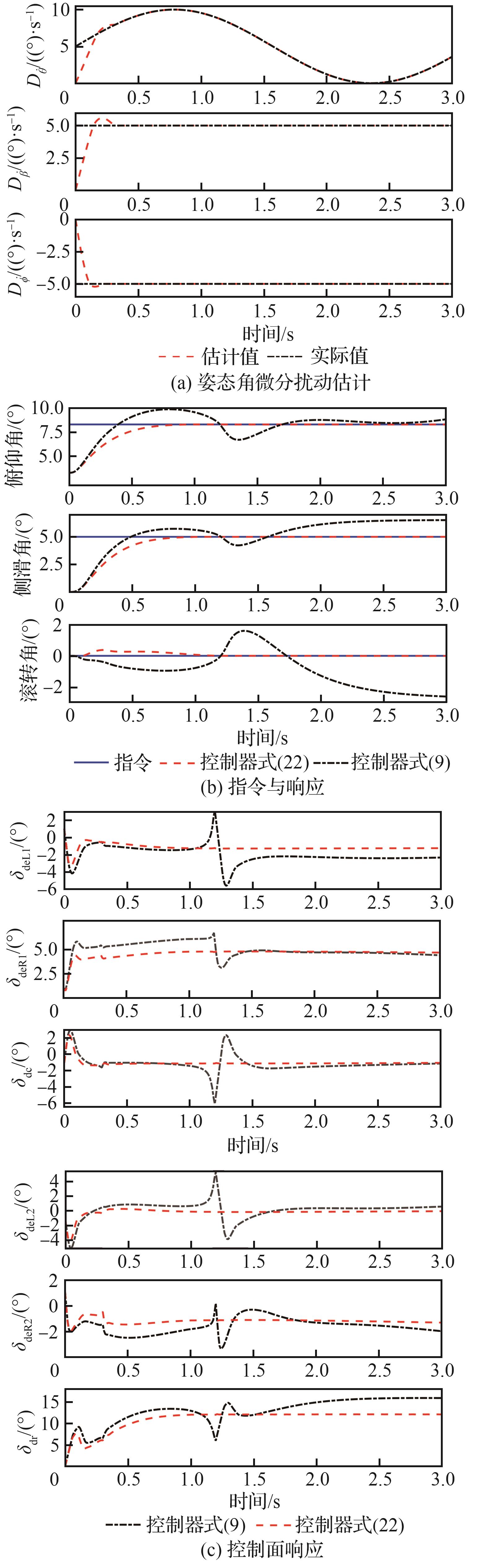
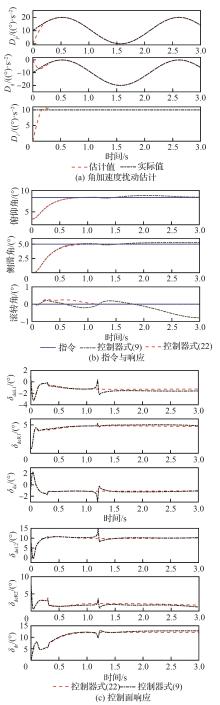
Fig.7
Aircraft response under the disturbance of angular acceleration signal
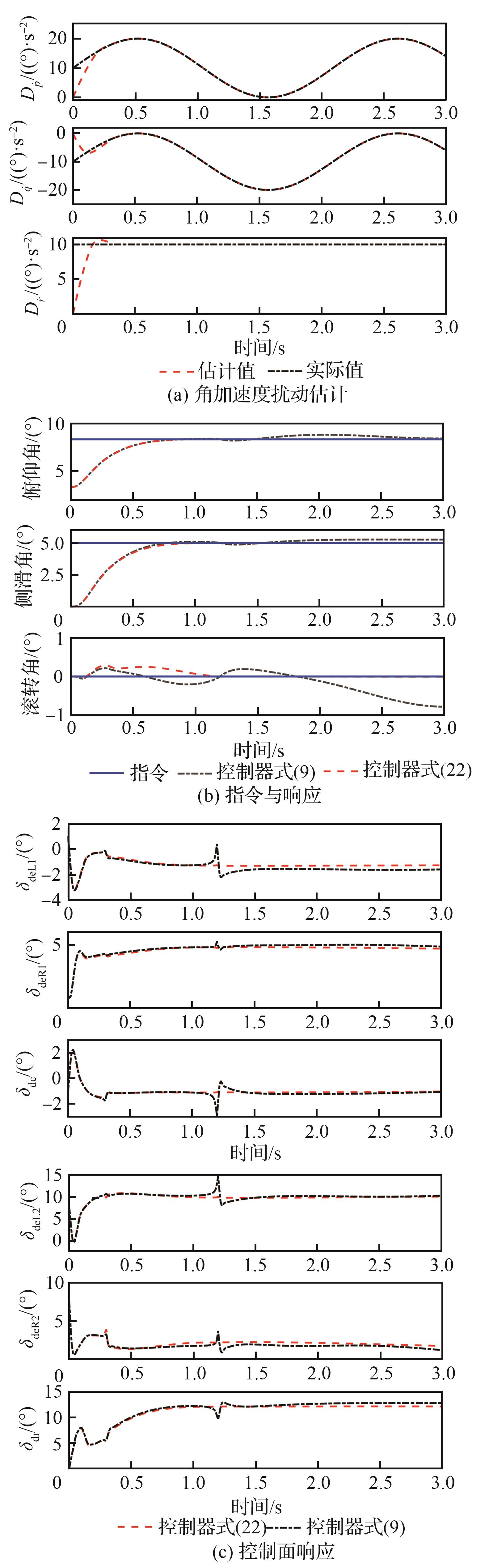
Fig.8
Comparison of PTDO and FTESO
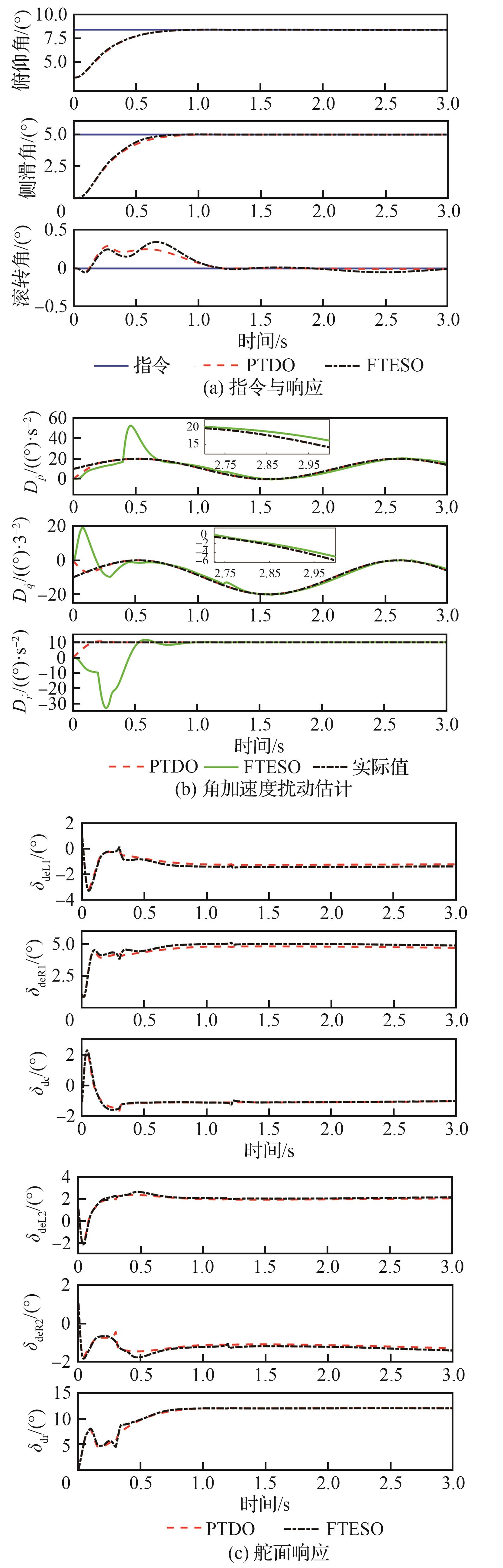
Table 3
Comparison algorithms and their parameters
| 算法 | 控制参数 |
|---|---|
| 对比算法1 | |
| 对比算法2 |
Fig.9
Comparison of simulations of the normal aircraft model with different control algorithms
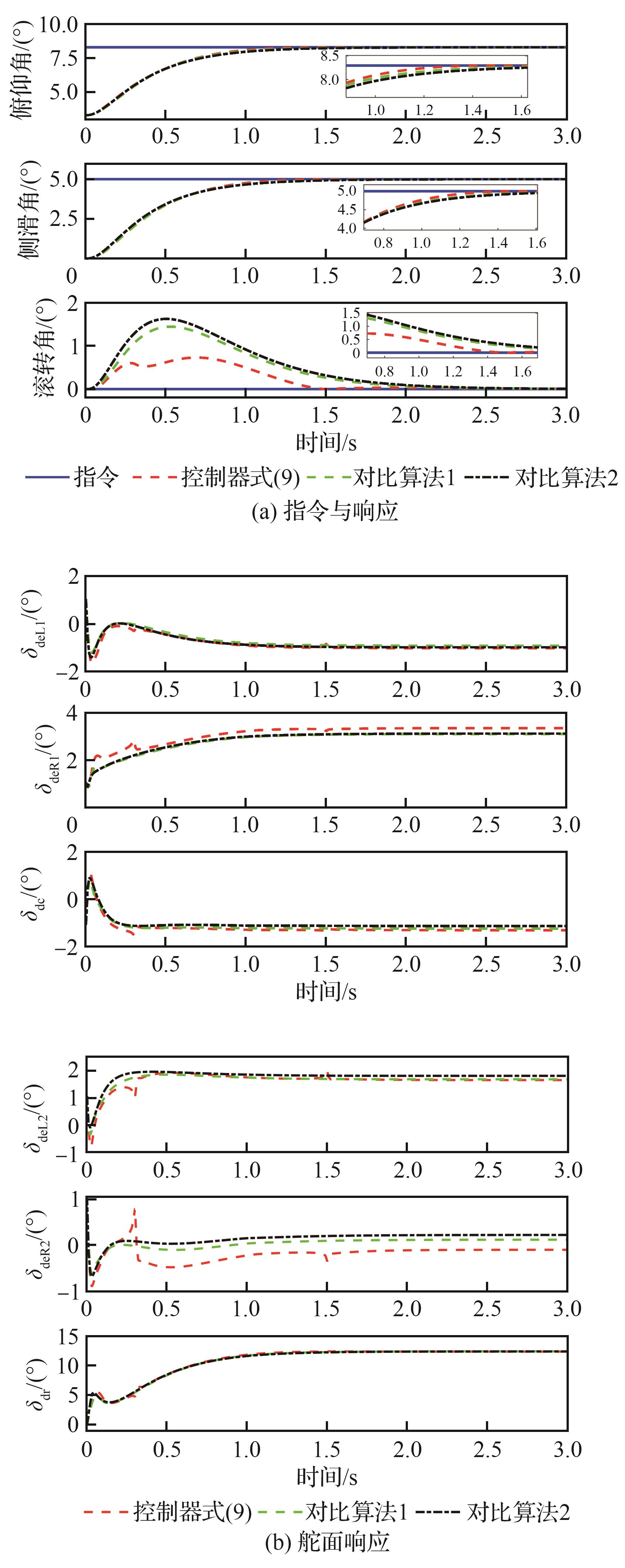
Fig.10
Comparison of the wing-damaged aircraft model with different control algorithms
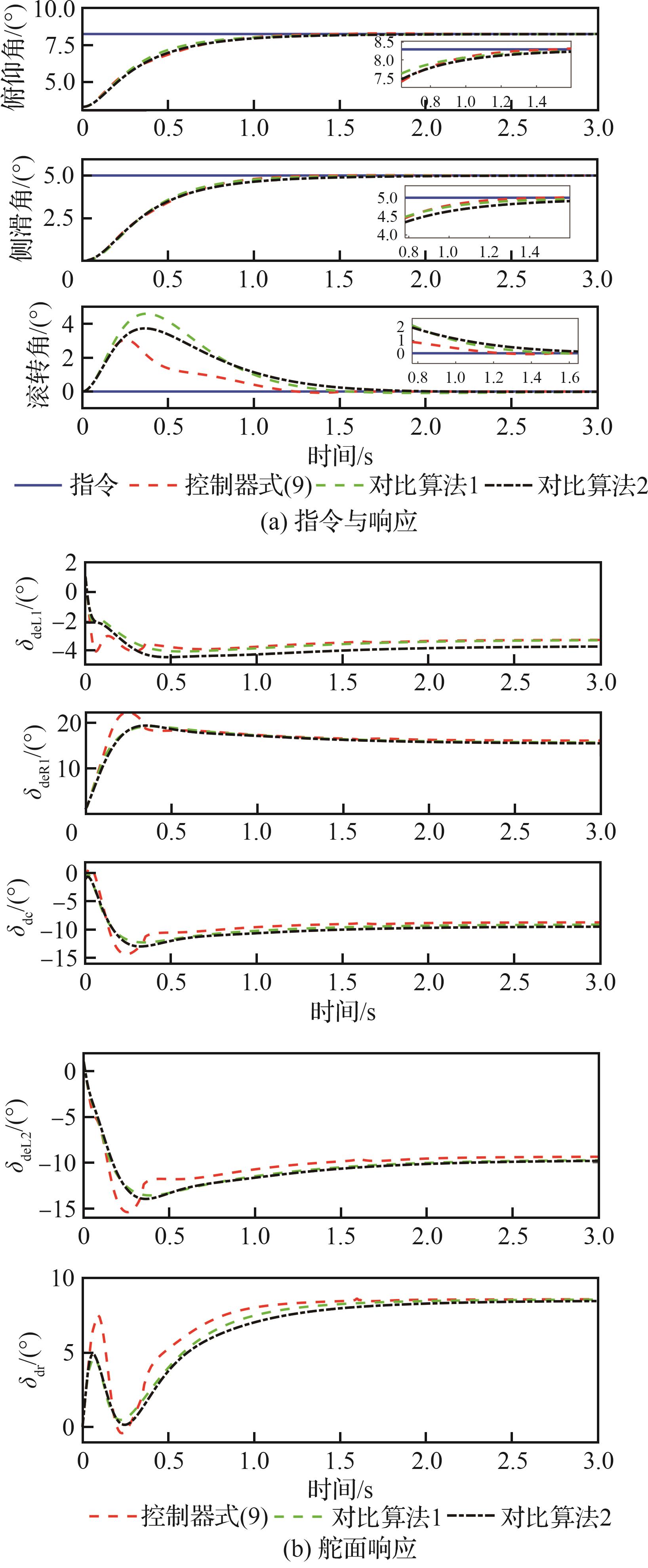
Fig.11
Comparison of different control algorithms under angular acceleration signal interference
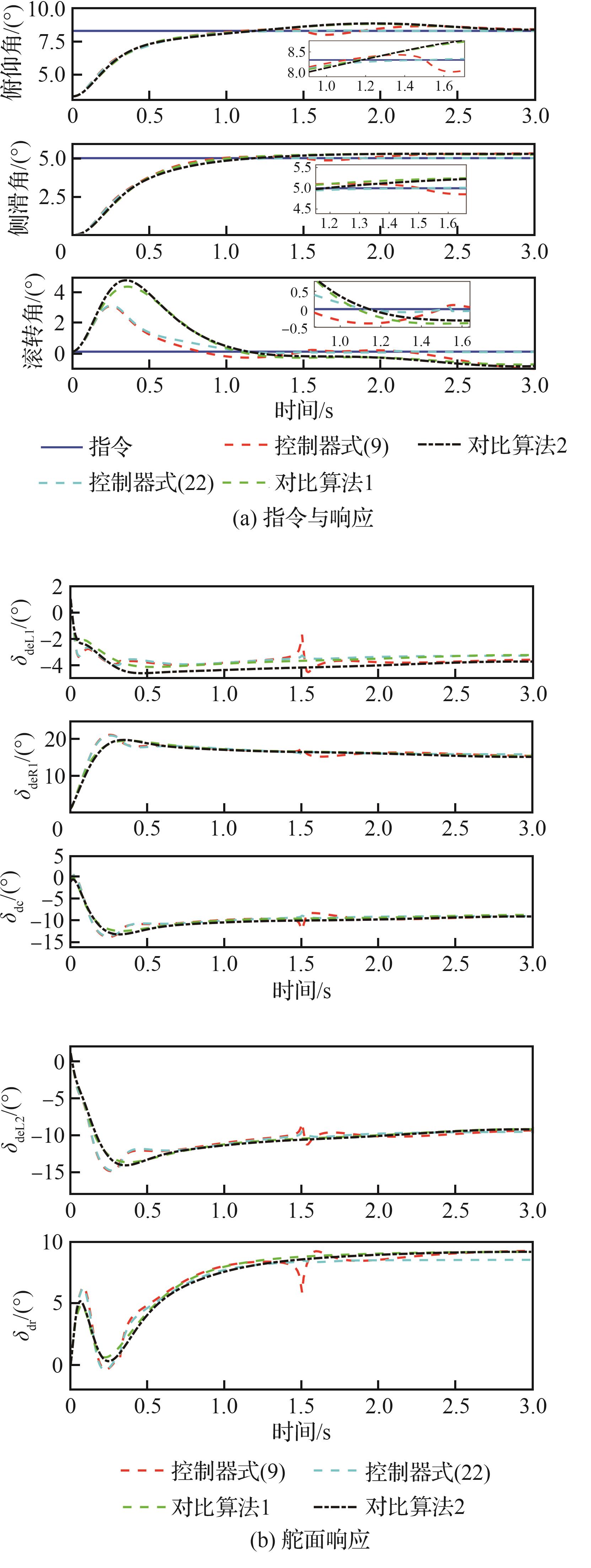

Fig.12
HIL simulation platform architecture
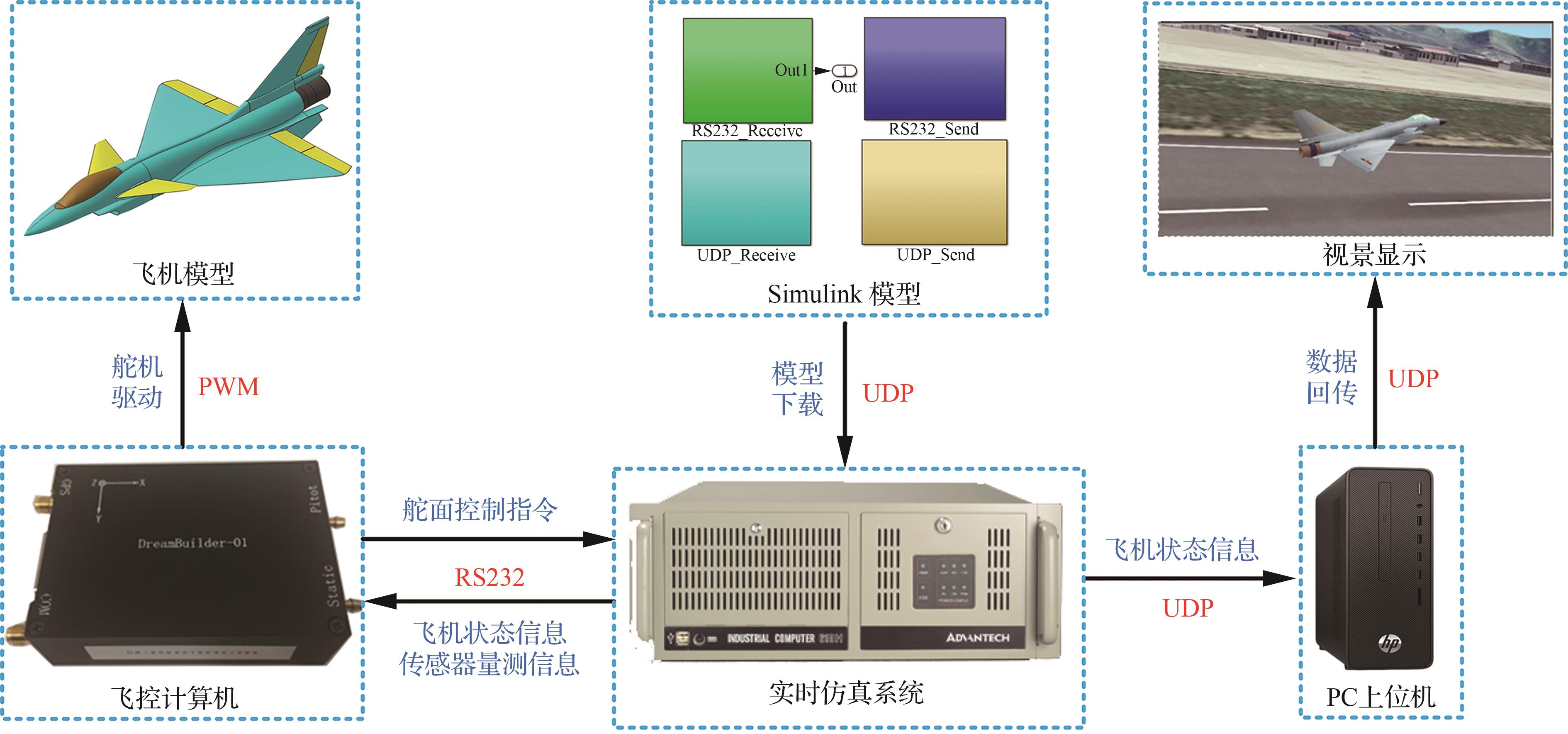

Fig.13
Display of HIL simulation platform
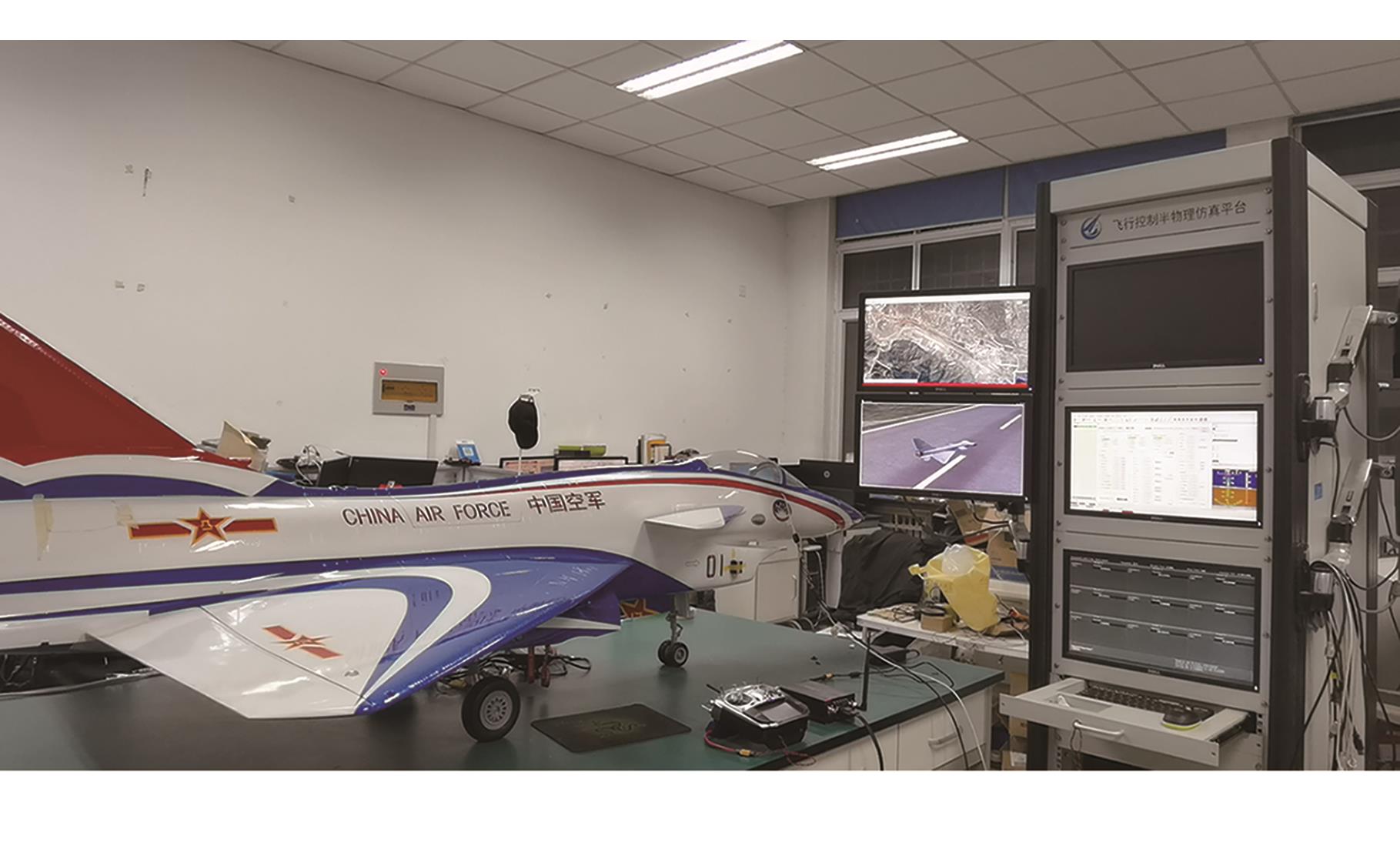
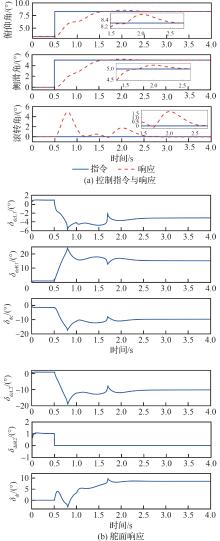
Fig.14
Results of HIL simulation
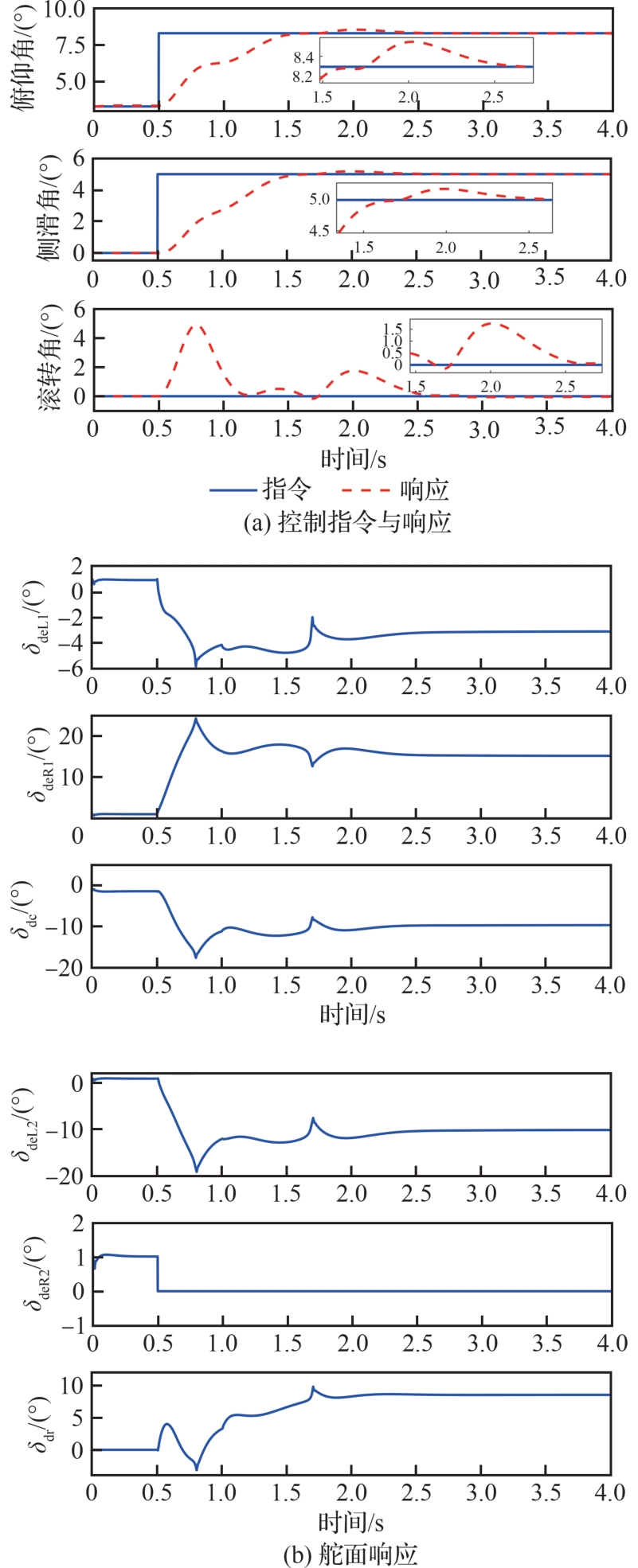
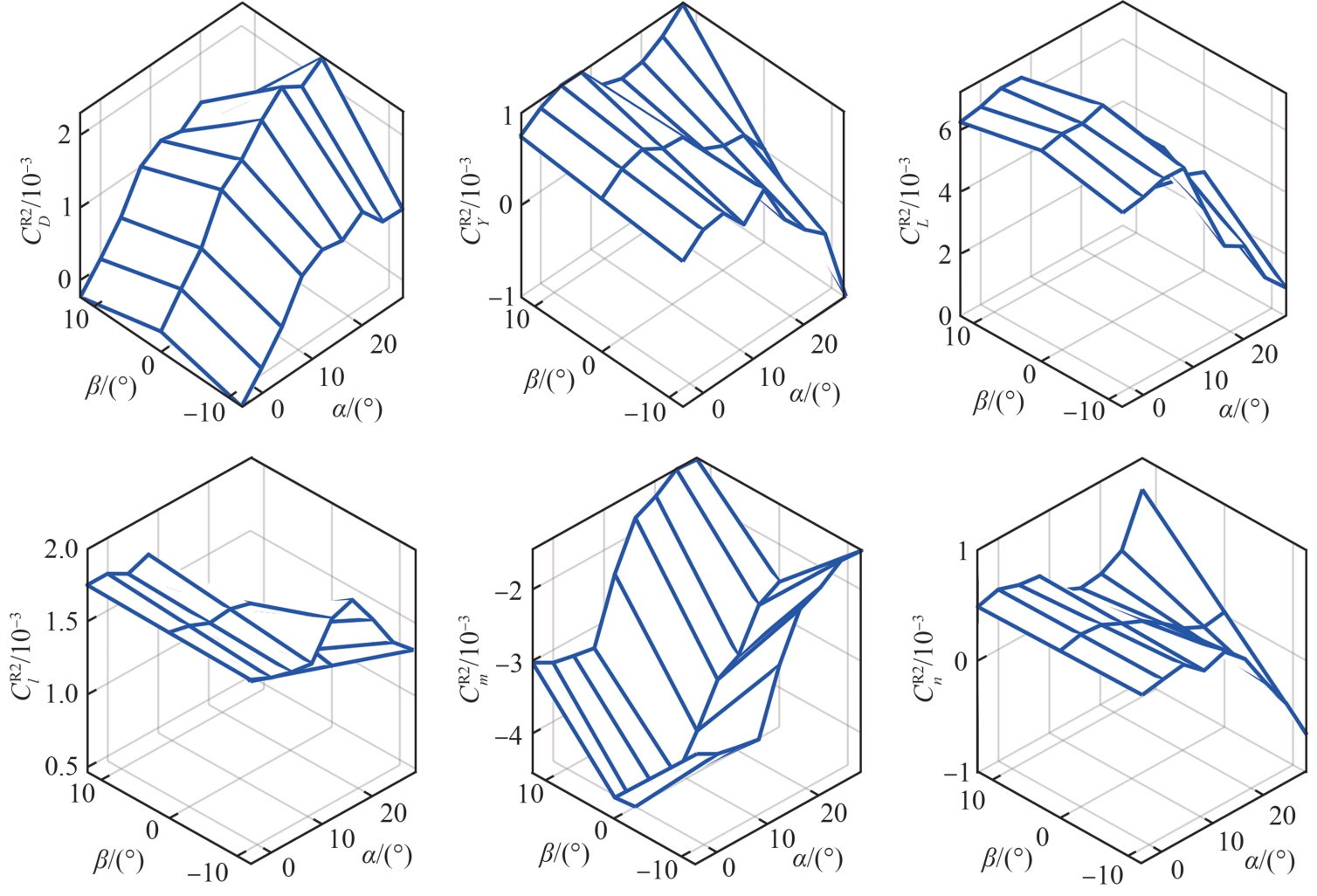
Fig.A1
Variation of force and moment derivatives of right lateral aileron δdeR2
| [1] | BELCASTRO C M, FOSTER J V, SHAH G H, et al. Aircraft loss of control problem analysis and research toward a holistic solution[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(4): 733-775. |
| [2] | ROHITH G. An investigation into aircraft loss of control and recovery solutions[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(12): 4509-4522. |
| [3] | LU Z D, HONG H C, GERDTS M, et al. Flight envelope prediction via optimal control-based reachability analysis[J]. Journal of Guidance, Control, and Dynamics, 2021, 45(1): 185-195. |
| [4] | KRZYSIAK A. Wind tunnel tests of damage to the tu-154M aircraft wing[J]. Journal of Aerospace Engineering, 2019, 32(6): 04019083. |
| [5] | NABI H N, LOMBAERTS T, ZHANG Y, et al. Effects of structural failure on the safe flight envelope of aircraft[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(6): 1257-1275. |
| [6] | 钟友武, 倪少波, 杨凌宇, 等. 结构受损飞机动力学模型与飞行控制方法[J]. 北京航空航天大学学报, 2013, 39(2): 154-158. |
| ZHONG Y W, NI S B, YANG L Y, et al. Dynamic model and flight control method for structure damaged aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(2): 154-158 (in Chinese). | |
| [7] | OGUNWA T T, ABDULLAH E J. Flight dynamics and control modelling of damaged asymmetric aircraft[J]. IOP Conference Series: Materials Science and Engineering, 2016, 152: 012022. |
| [8] | JOURDAN D, PIEDMONTE M, GAVRILETS V, et al. Enhancing UAV survivability through damage tolerant control[C]∥AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010: 7548. |
| [9] | ZHANG J, YANG X K, YANG L Y. Virtual-command-based model reference adaptive control for abrupt structurally damaged aircraft[J]. Aerospace Science and Technology, 2018, 78: 452-460. |
| [10] | LI Y, LIU X X, HE Q Z, et al. L1 adaptive structure-based nonlinear dynamic inversion control for aircraft with center of gravity variations[J]. Journal of Intelligent & Robotic Systems, 2022, 106(1): 4. |
| [11] | LI Y, LIU X X, MING R C, et al. Improved model reference-based adaptive nonlinear dynamic inversion for fault-tolerant flight control[J]. International Journal of Robust and Nonlinear Control, 2023, 33(17): 10328-10359. |
| [12] | ZUO Z Y, MALLIKARJUNAN S. L1 adaptive backstepping for robust trajectory tracking of UAVs[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 2944-2954. |
| [13] | Park H, Kim Y. L1 adaptive backstepping control of aircraft under actuator failures[C]∥2019 European Conference for Aeronautics and Aerospace Science. Paris: EDP science and Torus press, 2019: 1-14. |
| [14] | ASADI D, BAGHERZADEH S. Nonlinear adaptive sliding mode tracking control of an airplane with wing damage[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2018, 232(8): 1405-1420. |
| [15] | ASADI D, AHMADI K. Nonlinear robust adaptive control of an airplane with structural damage[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2020, 234(14): 2076-2088. |
| [16] | PETTERSSON A, ÅSTRÖM K J, ROBERTSSON A, et al. Analysis of linear L1 adaptive control architectures for aerospace applications[C]∥2012 IEEE 51st IEEE Conference on Decision and Control (CDC). Piscataway: IEEE Press, 2012: 1136-1141. |
| [17] | LI Y, LIU X X, LU P, et al. Angular acceleration estimation-based incremental nonlinear dynamic inversion for robust flight control[J]. Control Engineering Practice, 2021, 117: 104938. |
| [18] | SMEUR E J J, CHU Q P, DE CROON G C H E. Adaptive incremental nonlinear dynamic inversion for attitude control of micro air vehicles[J]. Journal of Guidance, Control, and Dynamics, 2015, 39(3): 450-461. |
| [19] | LI Y, LIU X X, MING R C, et al. A cascaded nonlinear fault-tolerant control for fixed-wing aircraft with wing asymmetric damage[J]. ISA Transactions, 2023, 136: 503-524. |
| [20] | WANG Y C, CHEN W S, ZHANG S X, et al. Command-filtered incremental backstepping controller for small unmanned aerial vehicles[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(4): 954-967. |
| [21] | JEON B J, SEO M G, SHIN H S, et al. Understandings of classical and incremental backstepping controllers with model uncertainties[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(4): 2628-2641. |
| [22] | LIU J, SUN L G, TAN W Q, et al. Finite time observer based incremental nonlinear fault-tolerant flight control[J]. Aerospace Science and Technology, 2020, 104: 105986. |
| [23] | HUANG D Q, HUANG T P, QIN N, et al. Finite-time control for a UAV system based on finite-time disturbance observer[J]. Aerospace Science and Technology, 2022, 129: 107825. |
| [24] | CORDEIRO R A, AZINHEIRA J R, MOUTINHO A. Robustness of incremental backstepping flight controllers: the boeing 747 case study[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 3492-3505. |
| [25] | WANG X R, VAN KAMPEN E J, CHU Q P, et al. Incremental sliding-mode fault-tolerant flight control[J]. Journal of Guidance, Control, and Dynamics, 2018, 42(2): 244-259. |
| [26] | LIU J H, SHAN J Y, WANG J N, et al. Incremental sliding-mode control and allocation for morphing-wing aircraft fast manoeuvring[J]. Aerospace Science and Technology, 2022, 131: 107959. |
| [27] | SUN J L, YI J Q, PU Z Q, et al. Fixed-time sliding mode disturbance observer-based nonsmooth backstepping control for hypersonic vehicles[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(11): 4377-4386. |
| [28] | WANG X, GUO J, TANG S J, et al. Fixed-time disturbance observer based fixed-time back-stepping control for an air-breathing hypersonic vehicle[J]. ISA Transactions, 2019, 88: 233-245. |
| [29] | SONG Y D, YE H F, LEWIS F L. Prescribed-time control and its latest developments[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(7): 4102-4116. |
| [30] | 吴慈航, 闫建国, 钱先云, 等. 受油机指定时间姿态稳定控制[J]. 航空学报, 2022, 43(2): 324996. |
| WU C H, YAN J G, QIAN X Y, et al. Predefined-time attitude stabilization control of receiver aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(2): 324996 (in Chinese). | |
| [31] | LI Y, WEN C Y, LIU X X, et al. Prescribed-time fault-tolerant flight control for aircraft subject to structural damage[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, PP(99): 1-12. |
| [32] | 徐世昊, 关英姿, 浦甲伦, 等. VTHL运载器再入返回预设时间滑模控制[J]. 航空学报, 2023, 44(7): 326857. |
| XU S H, GUAN Y Z, PU J L, et al. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(7): 326857 (in Chinese). | |
| [33] | CHEN H L, WANG P, TANG G J. Prescribed-time control for hypersonic morphing vehicles with state error constraints and uncertainties[J]. Aerospace Science and Technology, 2023, 142: 108671. |
| [1] | Naigang CUI, Guoxin QU, Xinhai MA, Shihao XU, Changzhu WEI. Adaptive prescribed-time/performance control for plane-symmetric aircraft in boost phase [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531470-531470. |
| [2] | Zhicheng ZHANG, Yuan ZHOU, Yu ZHAO, Weimin BAO. Cooperative formation control for multi-satellite system applied to distributed prescribed-time networking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330932-330932. |
| [3] | Tao CHEN, Jian CHEN. Learning-observer-based resilient fault-tolerant control for quadrotor unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531346-531346. |
| [4] | Jie LI, Wenxin HUANG, Yiming CAI, Siyuan WANG, Yufei GAO, Xuefeng JIANG. Fault diagnosis and fault tolerant control of position sensor based on DFPMM [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 329307-329307. |
| [5] | Wu LIU, Yunyan WU, Wei LIU, Mingming TIAN, Tianpeng HUANG. Re-entry robust fault tolerant attitude control for RLVs considering unknown disturbances [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727787-727787. |
| [6] | Bojian LIU, Aijun LI, Yong GUO, Changqing WANG. Fault-tolerant containment control for precise formation of UAVs with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327414-327414. |
| [7] | Zhongsen WANG, Yuxin LIAO, Caisheng WEI, Ting DAI. Fast terminal sliding mode fault⁃tolerant control of hypersonic vehicle with guaranteed performance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476-328476. |
| [8] | Wanli ZHAO, Yingqing GUO, Kejie XU, Cansen WANG, Haojie YING, Xinxin TAO. Review of key technologies for fault diagnosis and accommodation for multi⁃electric distributed engine control system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 27519-027519. |
| [9] | YANG Xiaowei, GE Yaowen, DENG Wenxiang, YAO Jianyong, ZHOU Ning. Active fault-tolerant control for hydraulic actuating cylinders of aeroengine guide vane control mechanisms [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 625464-625464. |
| [10] | HU Qinglei, SHAO Xiaodong, YANG Haoyang, DUAN Chao. Spacecraft attitude planning and control under multiple constraints: Review and prospects [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(10): 527351-527351. |
| [11] | LIANG Xiaohui, HU Changhua, ZHOU Zhijie, WANG Qing. ADP-based intelligent attitude fault-tolerant control for launch vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524915-524915. |
| [12] | LIU Deyuan, LIU Hao, Frank L LEWIS. Robust fault-tolerant formation control for tail-sitters [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(2): 324296-324296. |
| [13] | SI Binqiang, HUANG Yuping, ZHU Jihong, YU Hang. Active reconfigurable and fault-tolerant control technology for high reliability motor system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524853-524853. |
| [14] | MEI Yafei, LIAO Ying, GONG Kejie, LUO Da. Fixed-time fault-tolerant control for coupled spacecraft on SE(3) [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 525089-525089. |
| [15] | JIANG Bin, ZHANG Ke, YANG Hao, CHENG Yuehua, MA Yajie, CHENG Wanglei. Fault-tolerant control of satellite attitude control systems: Review [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524662-524662. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341