Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (6): 332451.doi: 10.7527/S1000-6893.2025.32451
• Electronics and Electrical Engineering and Control • Previous Articles
Sihua GAO, Bingyang ZHAO, Jianfu LI( )
)
Received:2025-06-20
Revised:2025-07-04
Accepted:2025-08-25
Online:2025-09-09
Published:2025-09-05
Contact:
Jianfu LI
E-mail:jfli@cauc.edu.cn
Supported by:CLC Number:
Sihua GAO, Bingyang ZHAO, Jianfu LI. UAV complete data collection trajectory planning algorithm based on time window constraints[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(6): 332451.
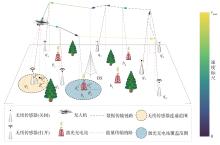
Fig.1
Illustration of the task
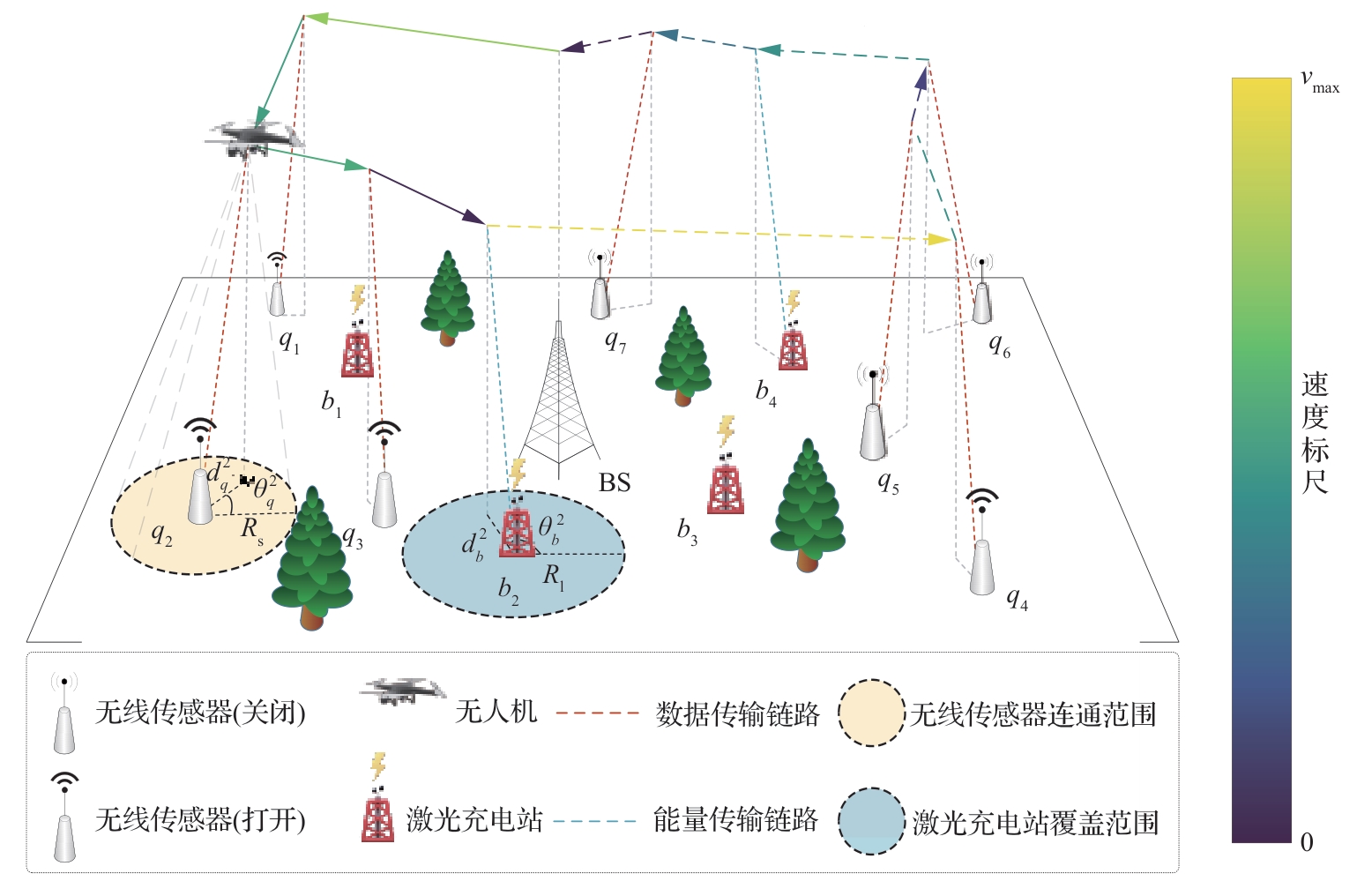

Fig.2
Network architecture of the hierarchical hybrid action representation model
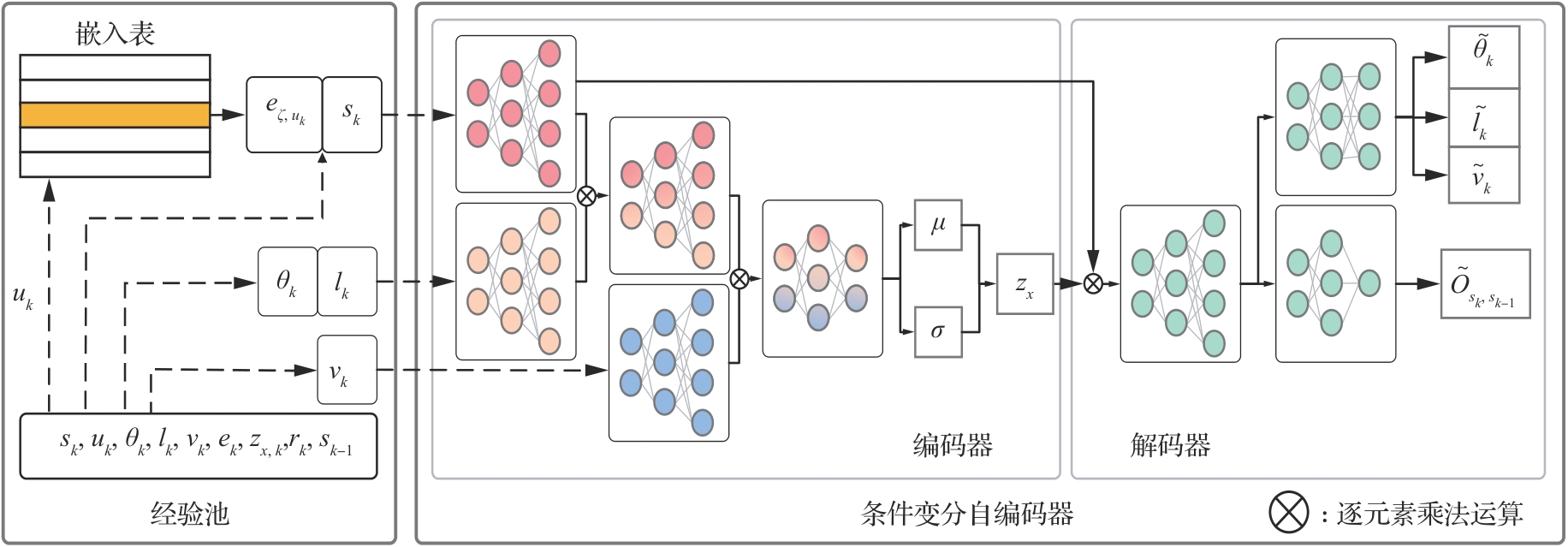

Fig.3
Network architecture of the hierarchical hybrid action representation framework
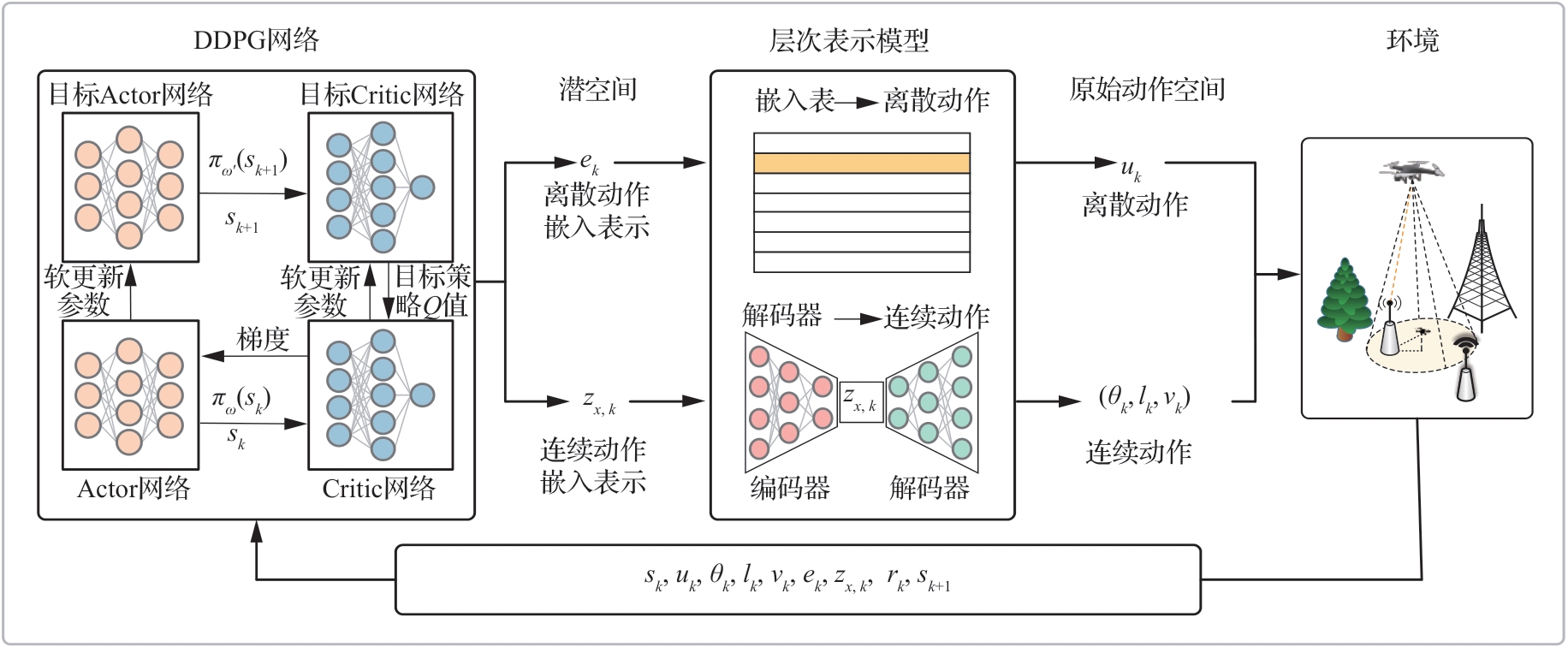
Table 1
Simulation parameters
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| 30 | |||
| 10 | 10 | ||
| 30 | 40 | ||
| 10, 0.6 | 1 | ||
| -20 | 0.2 | ||
| -30 | -90 | ||
| 2.3 | 79.86 | ||
| 88.63 | 120 | ||
| 1 | 4.03 | ||
| 0.6 | 1.225 | ||
| 0.05 | 0.503 | ||
| 2 | 0.15 | ||
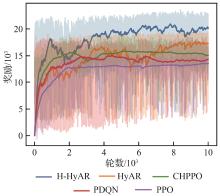
Fig.4
Training reward convergence curves
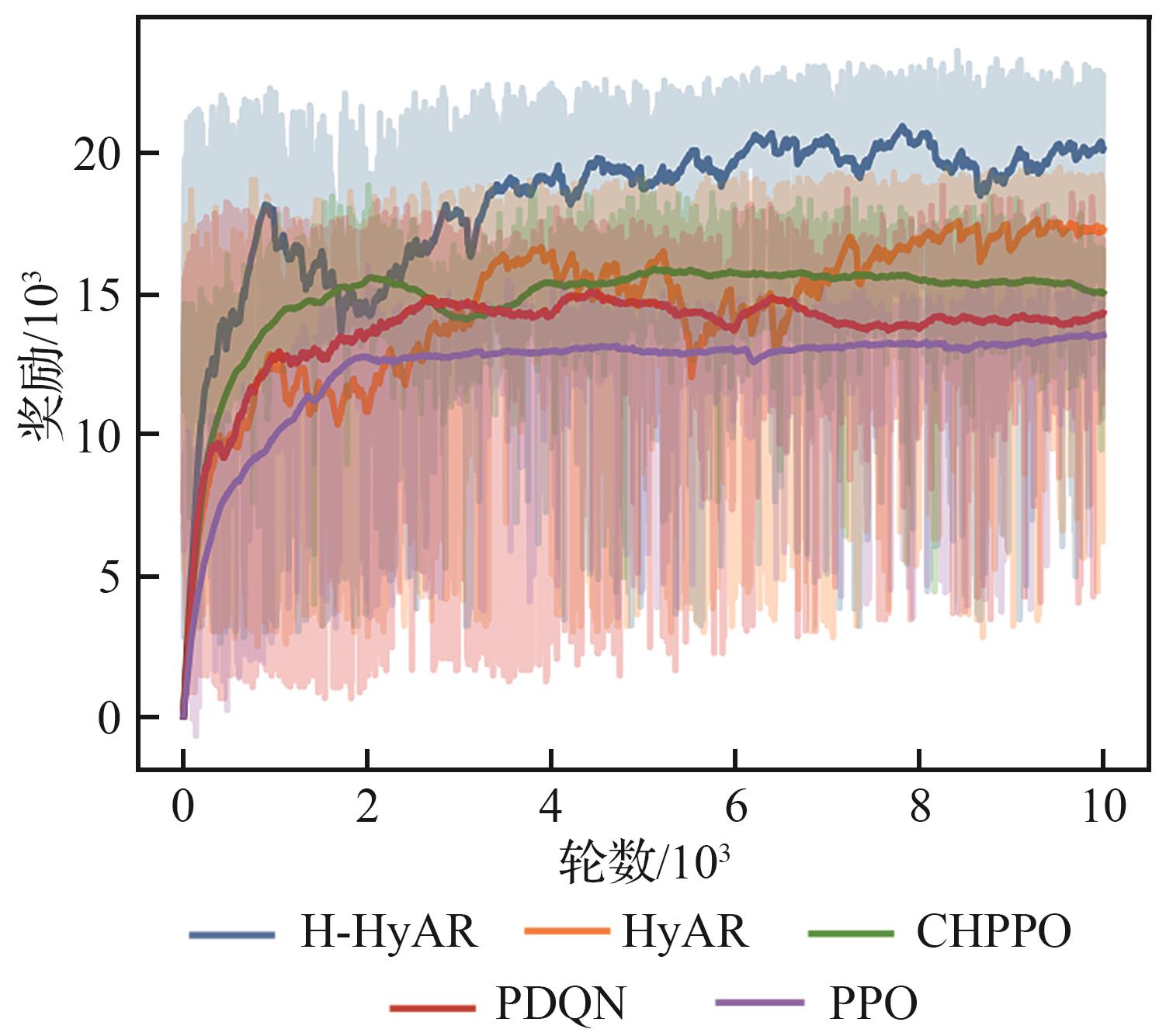
Table 2
Comparison of UAV flight distances of different algorithms under different time window lengths
任务 规模 | 时间窗长度/s | H-HyAR | HyAR | PDQN | CHPPO | PPO | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
飞行 距离/km | 完成 率/% | 飞行 距离/km | 完成 率/% | 飞行 距离/km | 完成 率/% | 飞行 距离/km | 完成 率/% | 飞行 距离/km | 完成 率/% | ||
| 60 | 400 | 15.36 | 97.4 | 16.43 | 95.6 | 18.73 | 94.9 | 17.74 | 95.0 | 19.82 | 93.5 |
| 600 | 15.06 | 97.5 | 16.24 | 96.4 | 17.50 | 95.2 | 17.27 | 96.3 | 19.98 | 94.3 | |
| 800 | 14.89 | 99.3 | 15.73 | 99.2 | 17.29 | 98.5 | 17.02 | 99.1 | 19.55 | 98.2 | |
| 80 | 400 | 17.24 | 93.6 | 17.40 | 93.4 | 19.43 | 92.5 | 18.61 | 92.3 | ||
| 600 | 16.51 | 95.2 | 17.21 | 94.9 | 19.23 | 94.3 | 18.11 | 93.2 | 20.76 | 92.7 | |
| 800 | 16.47 | 96.7 | 17.05 | 95.3 | 19.16 | 94.6 | 18.28 | 95.0 | 20.11 | 93.3 | |
| 100 | 400 | 22.16 | 92.1 | 23.89 | 91.7 | 24.84 | 89.9 | 24.75 | 91.2 | ||
| 600 | 20.87 | 94.2 | 22.27 | 93.7 | 23.28 | 93.4 | 22.78 | 92.4 | 24.95 | 91.2 | |
| 800 | 19.74 | 95.7 | 20.60 | 94.6 | 22.42 | 93.8 | 22.38 | 94.5 | 23.86 | 91.5 | |
Table 3
Comparison of UAV energy replenishment of different algorithms under different time window lengths
| 任务规模 | 时间窗长度/s | 能量补充量/(104 J) | ||||
|---|---|---|---|---|---|---|
| H-HyAR | HyAR | PDQN | CHPPO | PPO | ||
| 60 | 400 | 13.70 | 13.82 | 14.95 | 13.83 | 14.14 |
| 600 | 11.09 | 12.02 | 13.57 | 12.94 | 14.50 | |
| 800 | 10.56 | 10.98 | 11.10 | 11.77 | 14.31 | |
| 80 | 400 | 15.48 | 15.62 | 16.53 | 15.51 | |
| 600 | 14.11 | 14.79 | 14.53 | 14.72 | 15.75 | |
| 800 | 12.56 | 12.90 | 13.02 | 13.31 | 15.36 | |
| 100 | 400 | 16.47 | 16.76 | 19.27 | 17.41 | |
| 600 | 14.22 | 15.62 | 17.64 | 15.50 | 19.48 | |
| 800 | 13.63 | 14.29 | 16.70 | 14.49 | 18.88 | |

Fig.5
UAV flight trajectories and speeds under different algorithms
Table 4
Comparison of UAV flight distances under different numbers of laser charging stations
任务 规模 | 激光充电站 数量 | H-HyAR算法 | HyAR算法 | PDQN算法 | CHPPO算法 | PPO算法 | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
飞行 距离/km | 完成率/% | 飞行 距离/km | 完成率/% | 飞行 距离/km | 完成率/% | 飞行 距离/km | 完成率/% | 飞行 距离/km | 完成率/% | ||
| 60 | 2 | 17.79 | 95.9 | 18.21 | 94.5 | 19.12 | 93.3 | 18.61 | 93.7 | 20.44 | 92.8 |
| 4 | 15.36 | 97.4 | 16.43 | 95.6 | 18.73 | 94.9 | 17.74 | 95.0 | 19.82 | 93.5 | |
| 6 | 15.28 | 97.7 | 16.37 | 95.8 | 18.68 | 95.2 | 17.19 | 95.4 | 19.60 | 94.5 | |
| 80 | 2 | 19.25 | 92.3 | 19.55 | 91.5 | 20.58 | 90.3 | 20.42 | 91.4 | ||
| 4 | 17.24 | 93.6 | 17.40 | 93.4 | 19.43 | 92.5 | 18.61 | 92.3 | |||
| 6 | 17.07 | 94.0 | 17.21 | 93.9 | 19.20 | 93.1 | 18.59 | 92.8 | 21.95 | 92.5 | |
| 100 | 2 | 25.11 | 91.5 | 25.38 | 90.6 | 25.85 | 89.2 | 25.72 | 90.5 | ||
| 4 | 22.16 | 92.1 | 23.89 | 91.7 | 24.84 | 89.9 | 24.75 | 91.2 | |||
| 6 | 22.08 | 92.8 | 22.35 | 92.3 | 24.74 | 90.8 | 24.51 | 91.9 | 25.73 | 90.7 | |
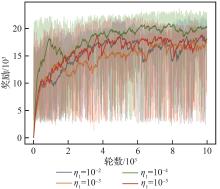
Fig.6
Reward convergence of DDPG network under different learning rates
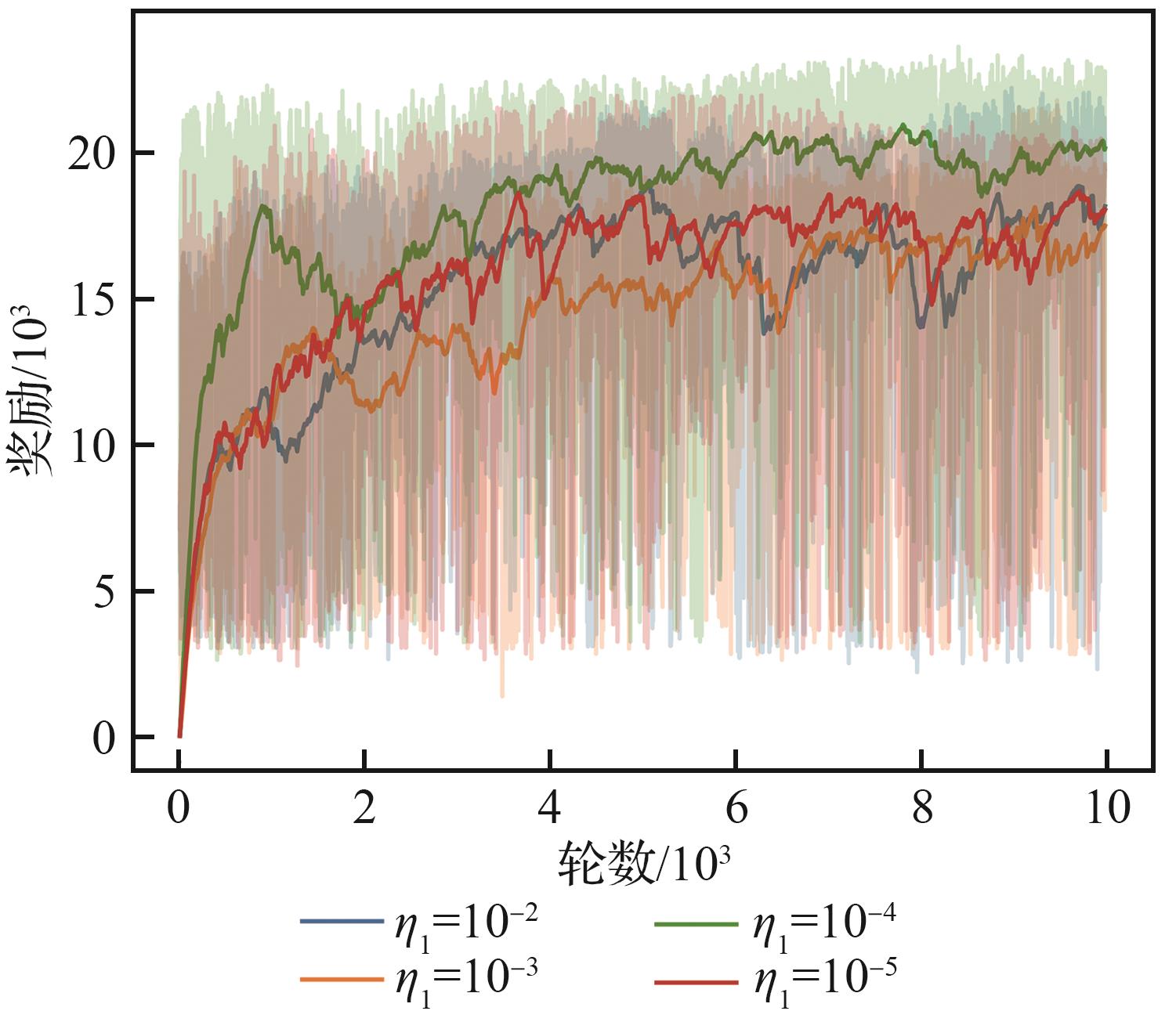
Fig.7
Reward convergence of hierarchical hybrid action representation model under different learning rates
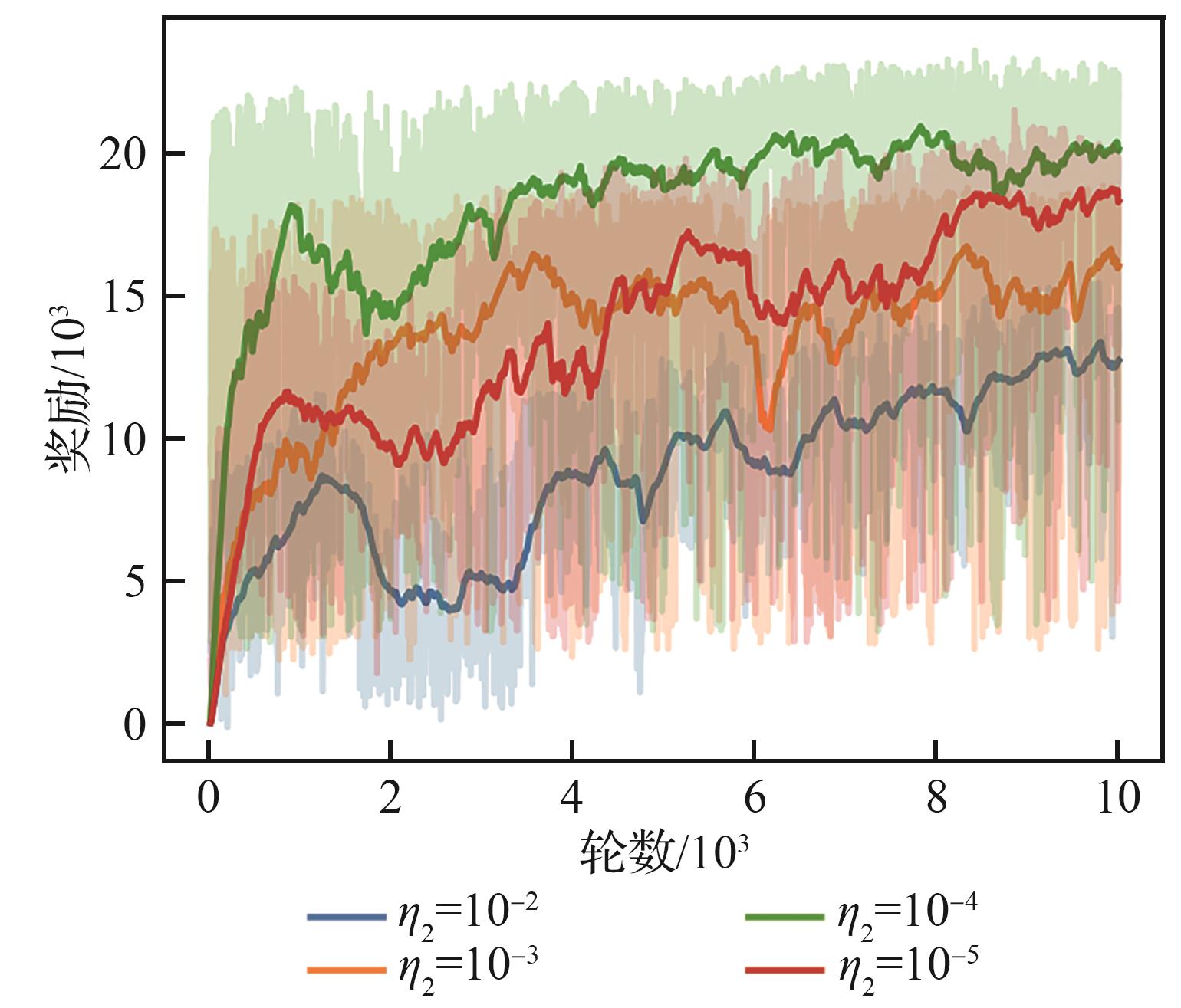
Fig.8
Reward convergence of DDPG network under different discount factors
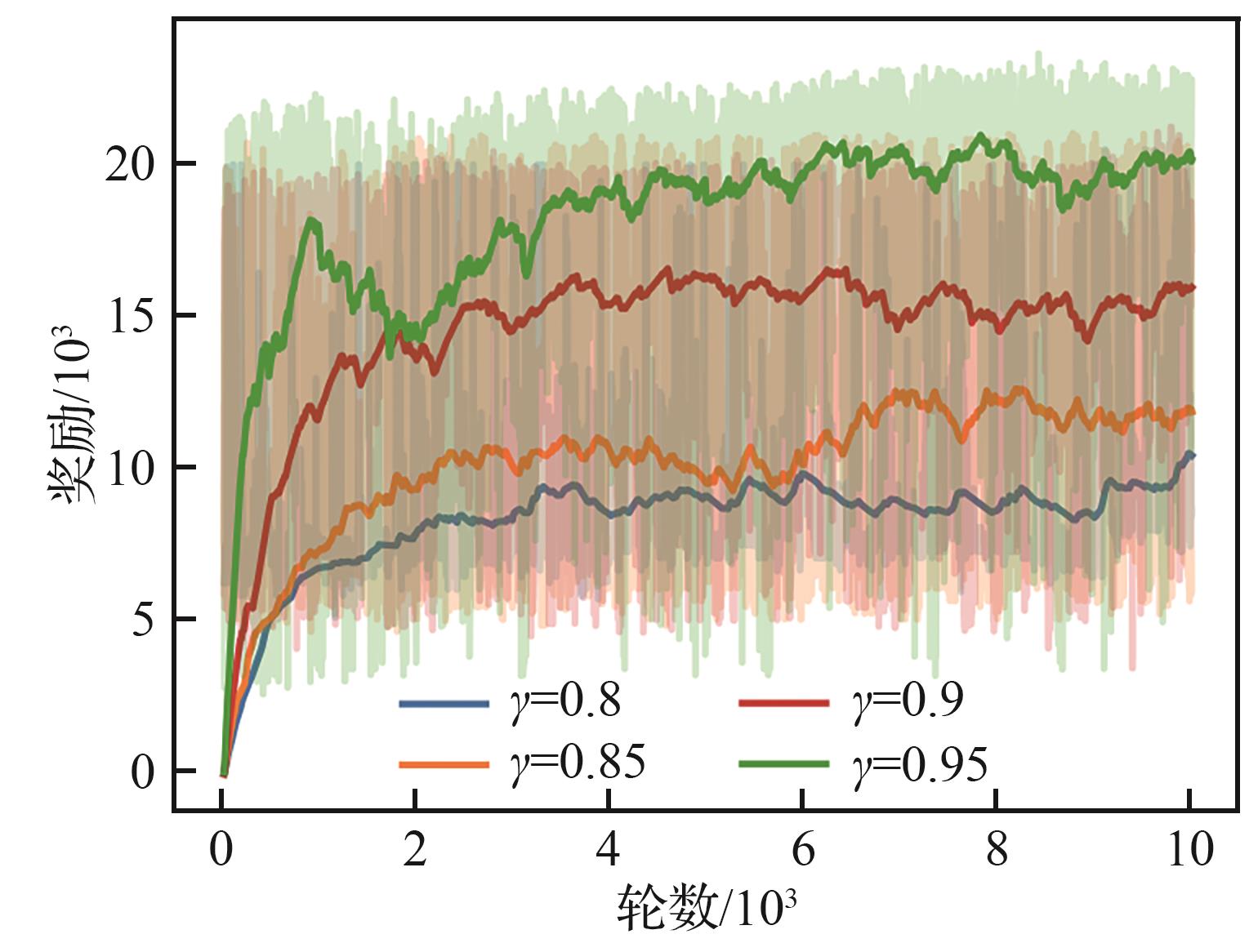
Fig.9
Reward convergence of DDPG network under different soft update parameters
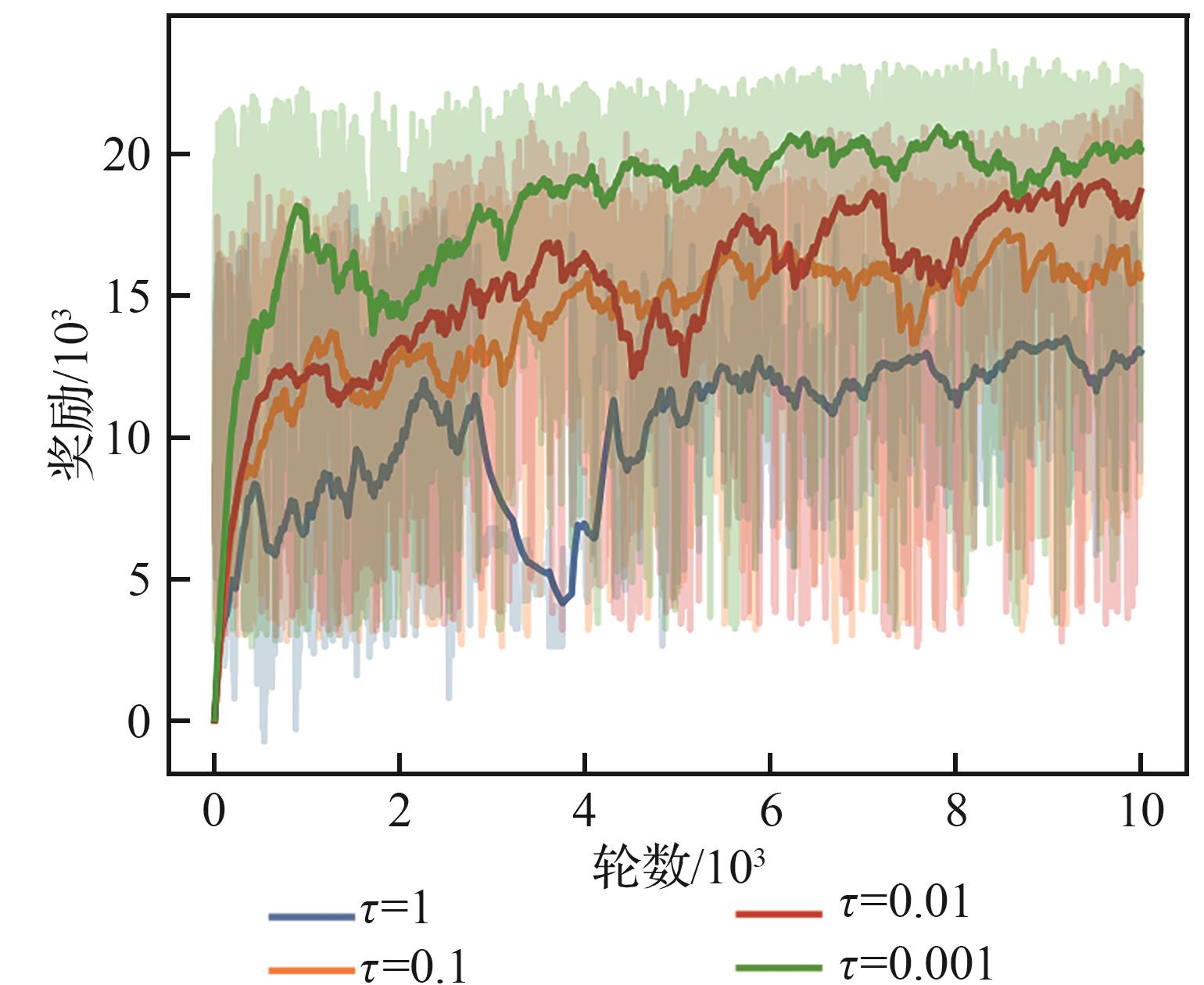
Table 5
Comparison of various metrics under different data collection reward parameters
| 时间窗长度/s | 飞行距离/km | 完成率/% | |
|---|---|---|---|
| 400 | 22.16 | 92.1 | |
| 22.76 | 91.7 | ||
| 22.36 | 91.9 | ||
| 600 | 20.87 | 94.2 | |
| 21.34 | 93.8 | ||
| 21.17 | 94.1 | ||
| 800 | 19.74 | 95.7 | |
| 20.19 | 95.3 | ||
| 20.14 | 95.5 |
Table 6
Comparison of various metrics under different charging reward parameters
| 时间窗长度/s | 飞行距离/km | 完成率/% | |
|---|---|---|---|
| 400 | 22.16 | 92.1 | |
| 23.05 | 91.8 | ||
| 22.64 | 91.5 | ||
| 600 | 20.87 | 94.2 | |
| 21.41 | 93.9 | ||
| 20.95 | 94.0 | ||
| 800 | 19.74 | 95.7 | |
| 20.46 | 95.5 | ||
| 20.55 | 95.1 |
Table 7
Comparison of various metrics under different terminal reward parameters
| 时间窗长度/s | 飞行距离/km | 完成率/% | |
|---|---|---|---|
| 400 | 22.16 | 92.1 | |
| 22.39 | 91.9 | ||
| 22.53 | 91.5 | ||
| 600 | 20.87 | 94.2 | |
| 20.89 | 93.8 | ||
| 21.23 | 93.7 | ||
| 800 | 19.74 | 95.7 | |
| 19.97 | 95.6 | ||
| 20.07 | 95.2 |
| [1] | YANG M, BI W H, ZHANG A, et al. A distributed task reassignment method in dynamic environment for multi-UAV system[J]. Applied Intelligence, 2022, 52(2): 1582-1601. |
| [2] | SAMIR M, SHARAFEDDINE S, ASSI C M, et al. UAV trajectory planning for data collection from time-constrained IoT devices[J]. IEEE Transactions on Wireless Communications, 2020, 19(1): 34-46. |
| [3] | CUI W, LI R L, FENG Y X, et al. Distributed task allocation for a multi-UAV system with time window constraints[J]. Drones, 2022, 6(9): 226. |
| [4] | WAN P F, WANG S K, XU G Y, et al. Hybrid heuristic-based multi-UAV route planning for time-dependent data collection[J]. IEEE Internet of Things Journal, 2024, 11(13): 24134-24147. |
| [5] | CHAPNEVIS A, BULUT E. Time-efficient approximate trajectory planning for AoI-centered multi-UAV IoT networks[J]. Internet of Things, 2025, 29: 101461. |
| [6] | 张薇, 何若俊. 面向物联网数据收集的无人机自主路径规划[J]. 航空学报, 2024, 45(8): 329054. |
| ZHANG W, HE R J. Autonomous trajectory design for IoT data collection by UAV[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 329054 (in Chinese). | |
| [7] | KUO H A, SHEU J P, VAN CUONG N. Profit maximization for UAV trajectory planning in time-constrained data collection[C]∥ICC 2023-IEEE International Conference on Communications. Piscataway: IEEE Press, 2023: 5413-5418. |
| [8] | LIU K, ZHENG J. UAV trajectory planning with interference awareness in UAV-enabled time-constrained data collection systems[J]. IEEE Transactions on Vehicular Technology, 2024, 73(2): 2799-2815. |
| [9] | LIAU Y S, HONG Y W P, SHEU J P. Laser-powered UAV trajectory and charging optimization for sustainable data-gathering in the Internet of Things[J]. IEEE Transactions on Mobile Computing, 2025, 24(5): 4278-4295. |
| [10] | LUO C W, LIU N, HOU Y N, et al. Trajectory optimization of laser-charged UAV to minimize the average age of information for wireless rechargeable sensor network[J]. Theoretical Computer Science, 2023, 945: 113680. |
| [11] | 乌兰, 刘全, 黄志刚, 等. 离线强化学习研究综述[J]. 计算机学报, 2025, 48(1): 156-187. |
| WU L, LIU Q, HUANG Z G, et al. A review of research on offline reinforcement learning[J]. Chinese Journal of Computers, 2025, 48(1): 156-187 (in Chinese). | |
| [12] | WAN P F, XU G Y, CHEN J W, et al. Deep reinforcement learning enabled multi-UAV scheduling for disaster data collection with time-varying value[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 6691-6702. |
| [13] | CAI M, FAN S, XIAO G, et al. Deep reinforcement learning-based UAV path planning algorithm in agricultural time-constrained data collection[J]. Advances in Electrical and Computer Engineering, 2023, 23(2): 101-108. |
| [14] | WANG J Y, LI S Y, CHEN D Z, et al. Flight trajectory control with network-oriented hierarchical reinforcement learning for UAVs-assisted data time-sensitive IoT[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(5): 6332-6345. |
| [15] | HU Y M, LIU Y, KAUSHIK A, et al. Timely data collection for UAV-based IoT networks: A deep reinforcement learning approach[J]. IEEE Sensors Journal, 2023, 23(11): 12295-12308. |
| [16] | BOUHAMED O, GHAZZAI H, BESBES H, et al. A UAV-assisted data collection for wireless sensor networks: Autonomous navigation and scheduling[J]. IEEE Access, 2020, 8: 110446-110460. |
| [17] | 高思华, 李军辉, 李建伏, 等. 面向公平性数据采集和能量补充的无人机路径规划算法研究[J]. 电子学报, 2024, 52(11): 3699-3710. |
| GAO S H, LI J H, LI J F, et al. Research on UAV path planning algorithm for fairness data collection and energy supplement[J]. Acta Electronica Sinica, 2024, 52(11): 3699-3710 (in Chinese). | |
| [18] | 高思华, 刘宝煜, 惠康华, 等. 信息年龄约束下的无人机数据采集能耗优化路径规划算法[J]. 电子与信息学报, 2024, 46(10): 4024-4034. |
| GAO S H, LIU B Y, HUI K H, et al. Energy-efficient UAV trajectory planning algorithm for AoI-constrained data collection[J]. Journal of Electronics & Information Technology, 2024, 46(10): 4024-4034 (in Chinese). | |
| [19] | LI B, TANG H, ZHENG Y, et al. HyAR: Addressing discrete-continuous action reinforcement learning via hybrid action representation[DB/OL]. arXiv preprint: 2109.05490, 2021. |
| [20] | YU Y, TANG J, HUANG J Y, et al. Multi-objective optimization for UAV-assisted wireless powered IoT networks based on extended DDPG algorithm[J]. IEEE Transactions on Communications, 2021, 69(9): 6361-6374. |
| [21] | WEI Z Q, ZHU M Y, ZHANG N, et al. UAV-assisted data collection for Internet of Things: A survey[J]. IEEE Internet of Things Journal, 2022, 9(17): 15460-15483. |
| [22] | FU Q Y, JIA R H, LYU F, et al. Collection point matters in time-energy tradeoff for UAV-enabled data collection of IoT devices[J]. IEEE Internet of Things Journal, 2024, 11(19): 31492-31506. |
| [23] | GONG H, HUANG B Q, JIA B, et al. Modeling power consumptions for multirotor UAVs[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 7409-7422. |
| [24] | SCHULMAN J, WOLSKI F, DHARIWAL P, et al. Proximal policy optimization algorithms[DB/OL]. arXiv preprint: 1707.06347, 2017. |
| [25] | LAHMERI M A, KISHK M A, ALOUINI M S. Charging techniques for UAV-assisted data collection: Is laser power beaming the answer?[J]. IEEE Communications Magazine, 2022, 60(5): 50-56. |
| [26] | HU H M, XIONG K, QU G, et al. AoI-minimal trajectory planning and data collection in UAV-assisted wireless powered IoT networks[J]. IEEE Internet of Things Journal, 2021, 8(2): 1211-1223. |
| [27] | WU M P, SU L J, CHEN J X, et al. Development and prospect of wireless power transfer technology used to power unmanned aerial vehicle[J]. Electronics, 2022, 11(15): 2297. |
| [28] | ZHANG Q Q, FANG W, LIU Q W, et al. Distributed laser charging: A wireless power transfer approach[J]. IEEE Internet of Things Journal, 2018, 5(5): 3853-3864. |
| [29] | ZENG Y, XU J, ZHANG R. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329-2345. |
| [1] | Lei ZHANG, Can TIAN, Fangqing WEN, Qinghe ZHANG, Han LIU. Multi-objective evolution with deep deterministic strategy gradient algorithm for mobile edge networks [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(3): 631880-631880. |
| [2] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [3] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [4] | Min YANG, Guanjun LIU, Ziyuan ZHOU. Control of lunar landers based on secure reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630553-630553. |
| [5] | Qichao XIE, Chengyu CAO, Yiyun ZHAO, Fanbiao LI. Integrated guidance and control method based on deep reinforcement learning parameter tuning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 632345-632345. |
| [6] | Chen WANG, Caisheng WEI, Zeyang YIN, Kai JIN, Xingchen LI. Collaborative planning of multi-UAV trajectories and communication strategies considering channel resource constraints [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 331837-331837. |
| [7] | Yu WANG, Zhipeng XIE, Yongjian TIAN, Guanglei MENG. Distributed UAV formation control with virtual structure guided reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331354-331354. |
| [8] | Wei CHEN, Lulu LI, Dong CHEN, Shaohui ZHANG, Yafei LI, Ke WANG, Yuanyuan JIN, Mingliang XU. Multi-aircraft cooperative decision-making methods driven by differentiated support demands for carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531274-531274. |
| [9] | Xudong CHEN, Qiqi CHEN, Yizhe LUO, Jiabao WANG, Mingliang XU. Dynamic parallel scheduling of heterogeneous carrier-based aircraft deck support operations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531329-531329. |
| [10] | Zheng WANG, Hua WANG, Keke CUI, Chaochao LI, Junnan LIU, Mingliang XU. Locally guided reinforcement learning for autonomous dispatching of carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531333-531333. |
| [11] | Xiaohua HAN, Wei HAN, Shimeng LU, Na LI, Fang GUO, Bing WAN, Xichao SU. Mission planning for ship-helicopter group wave launch and recovery oriented to mission time windows [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531773-531773. |
| [12] | Wenhui LING, Chunhui MU, Lingcong NIE, Xian DU, Ximing SUN. Improved DDPG-based multipoint pressure distribution control of variable geometry scramjet combustor at wide range velocities [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 131092-131092. |
| [13] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [14] | Shuyi GAO, Defu LIN, Duo ZHENG, Cheng XU. Intelligent maneuvering penetration guidance strategies for aerial vehicles considering interceptor detection capability limitations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 331304-331304. |
| [15] | Honglin ZHANG, Jianjun LUO, Weihua MA. Spacecraft game decision making for threat avoidance of space targets based on machine learning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 329136-329136. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341