Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (2): 332083.doi: 10.7527/S1000-6893.2025.32083
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Kang ZHANG1, Xinmin TANG1,2( ), Junwei GU1
), Junwei GU1
Received:2025-04-07
Revised:2025-05-19
Accepted:2025-07-01
Online:2025-07-21
Published:2025-07-15
Contact:
Xinmin TANG
E-mail:tangxinmin@nuaa.edu.cn
Supported by:CLC Number:
Kang ZHANG, Xinmin TANG, Junwei GU. Risk-aware autonomous avoidance for eVTOL[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(2): 332083.

Fig.1
Conservatively planned trajectory for eVTOL
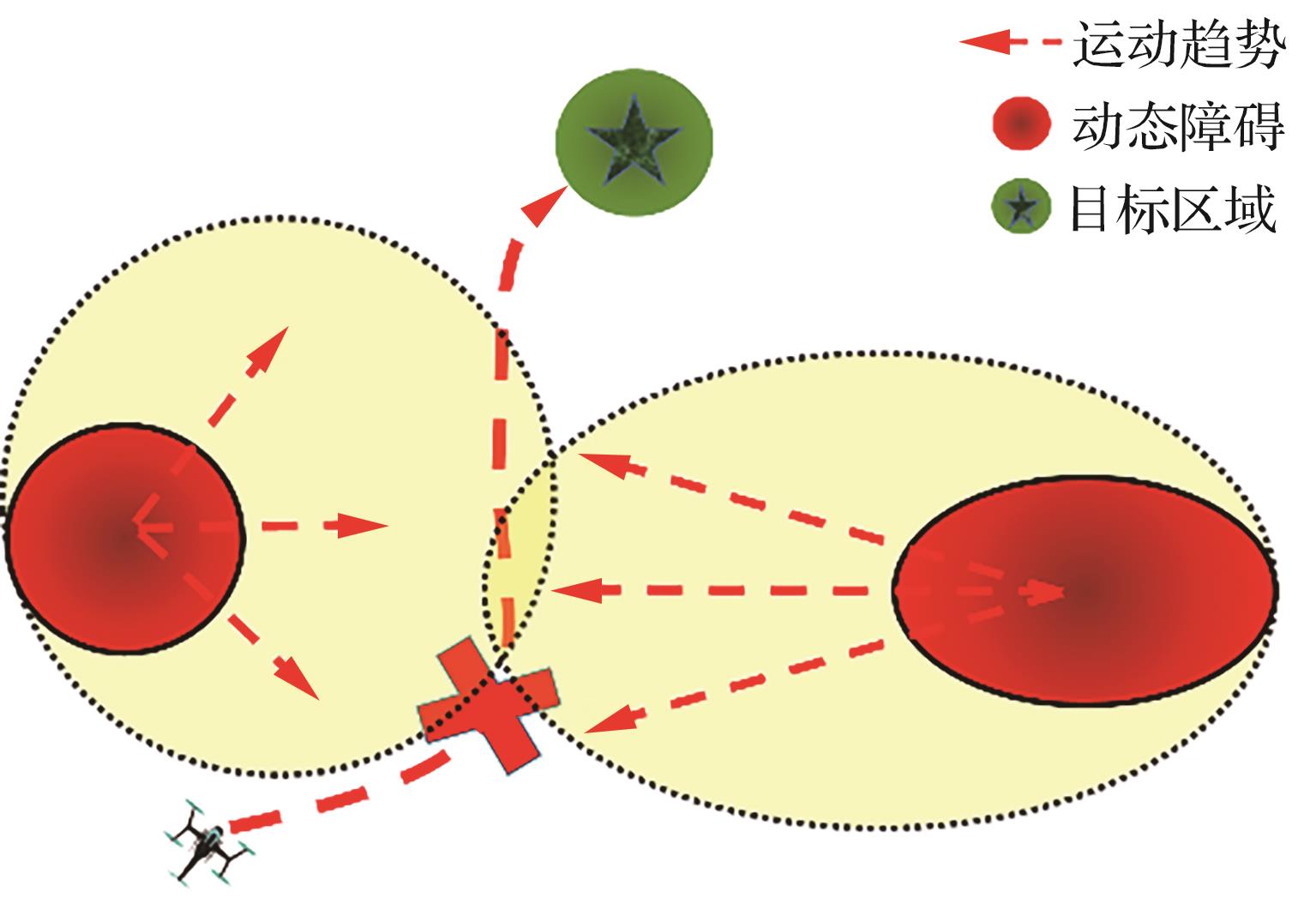
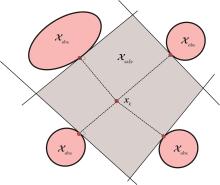
Fig.2
Convex approximation of ellipsoid constraints
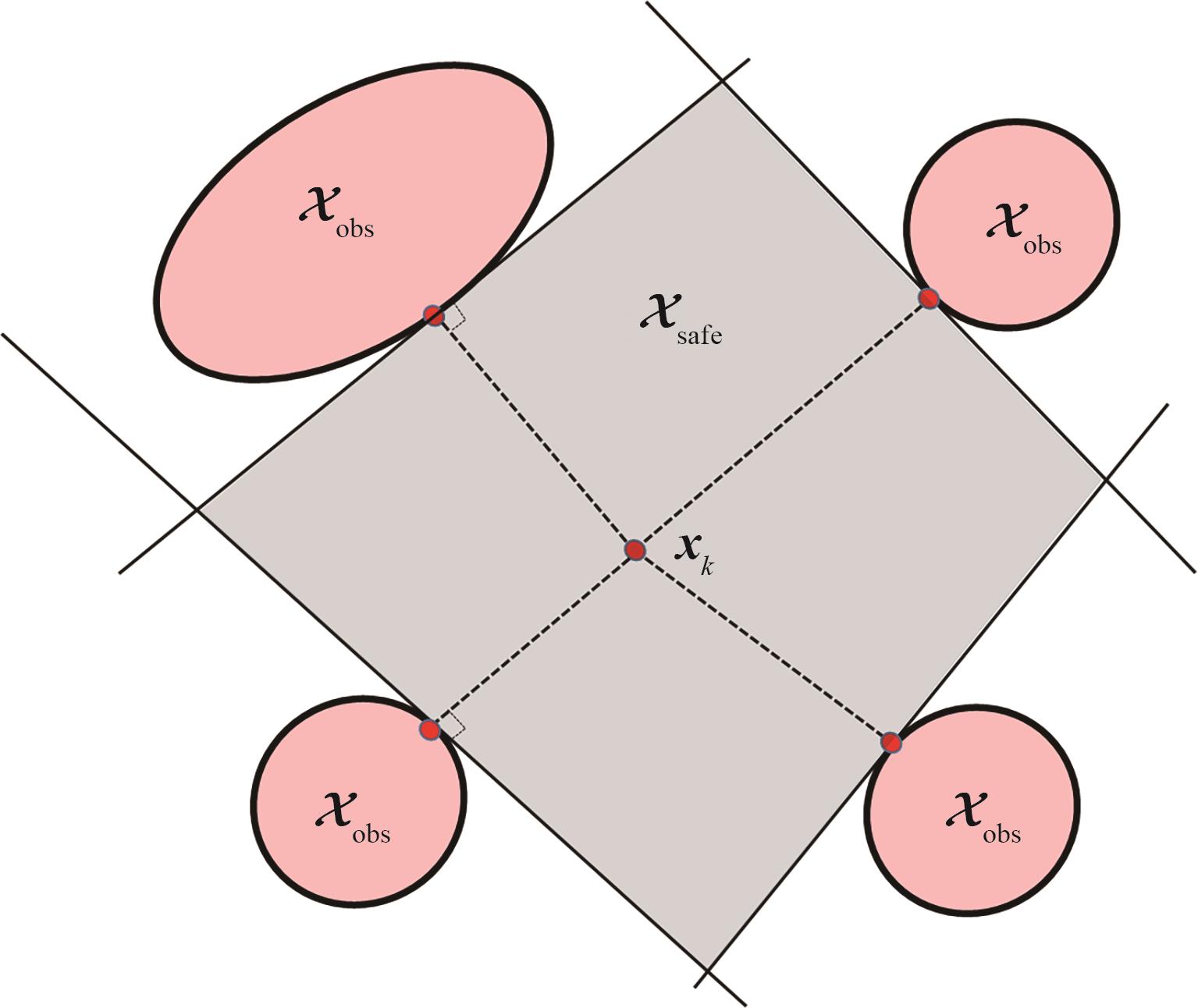
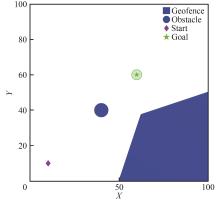
Fig.3
Initial configurations of the environment
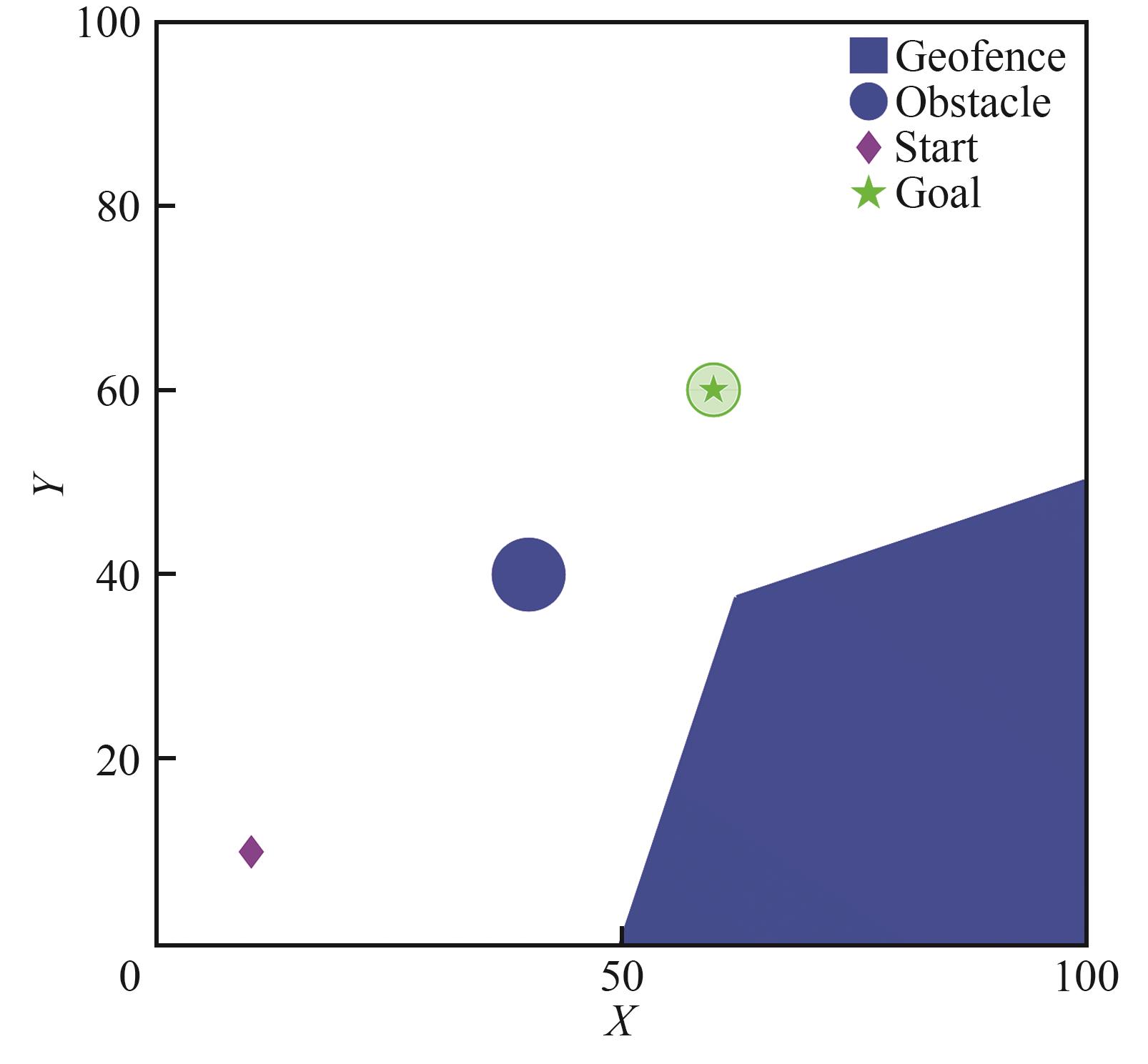
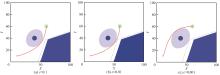
Fig.4
Open-loop trajectories under different safe thresholds
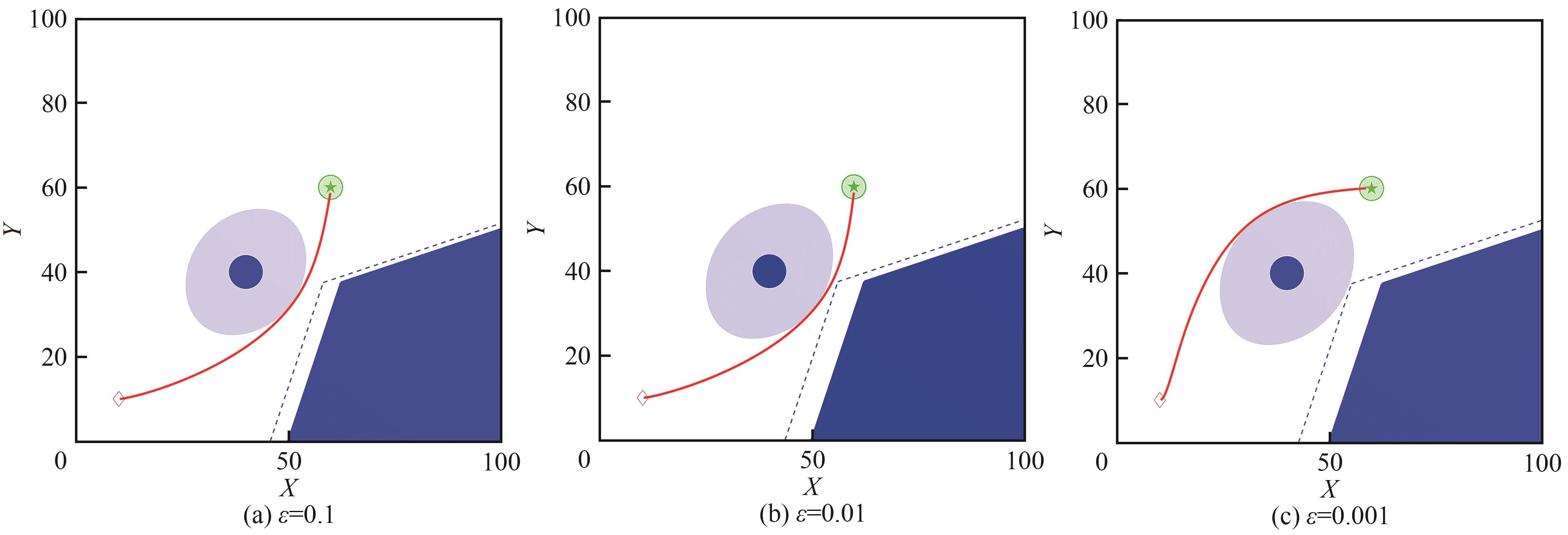
Table 1
Number of collisions and cost under different thresholds
| 安全阈值 | 碰撞次数 | 平均代价 |
|---|---|---|
| 0.001 | 1 | 83.738 9 |
| 0.01 | 6 | 62.623 8 |
| 0.1 | 33 | 57.688 9 |

Fig.5
Close-loop trajectory obtained over simulation
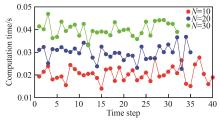
Fig.6
Computation times for various values of control horizon
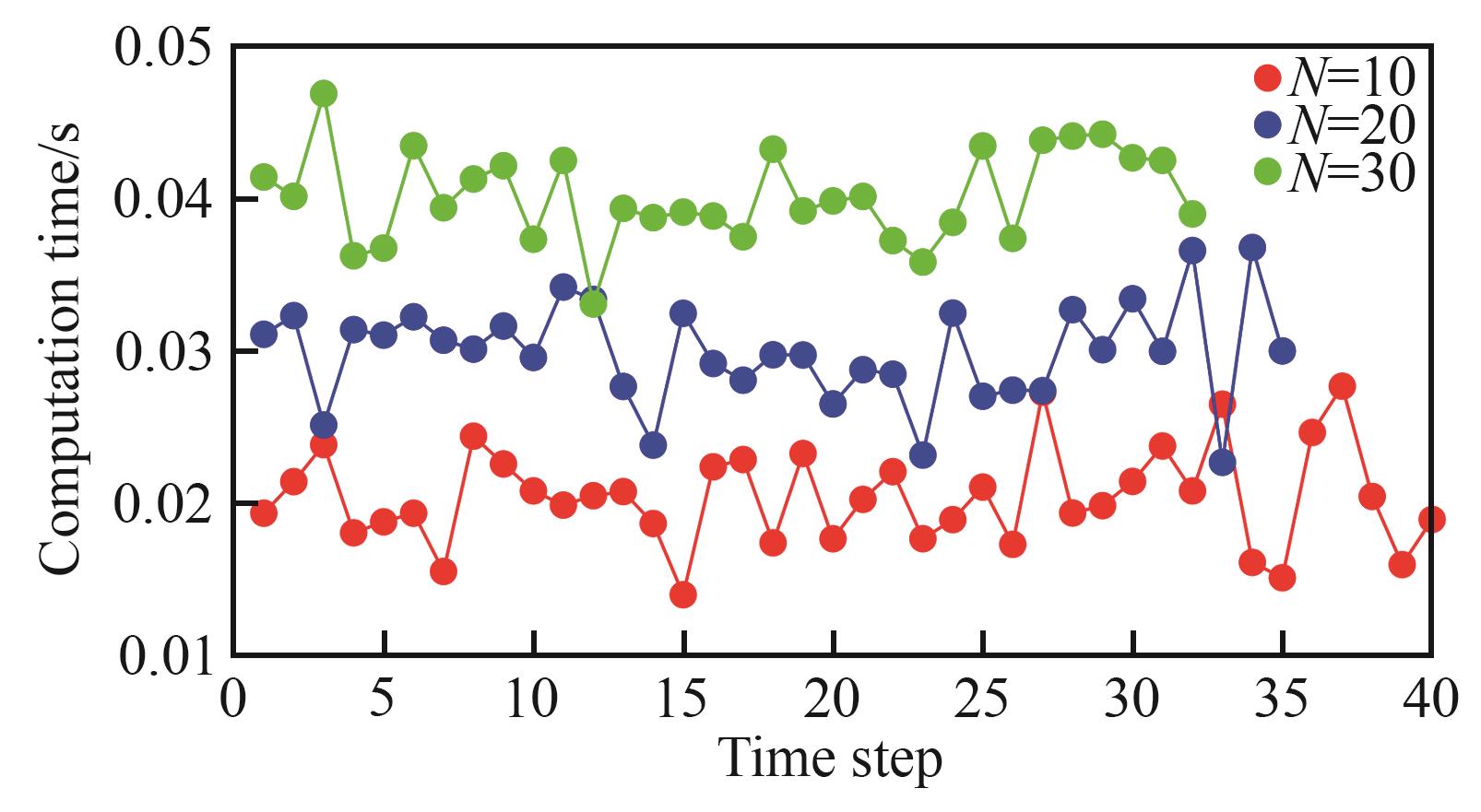

Fig.7
Close-loop trajectory obtained for different scenarios over simulation
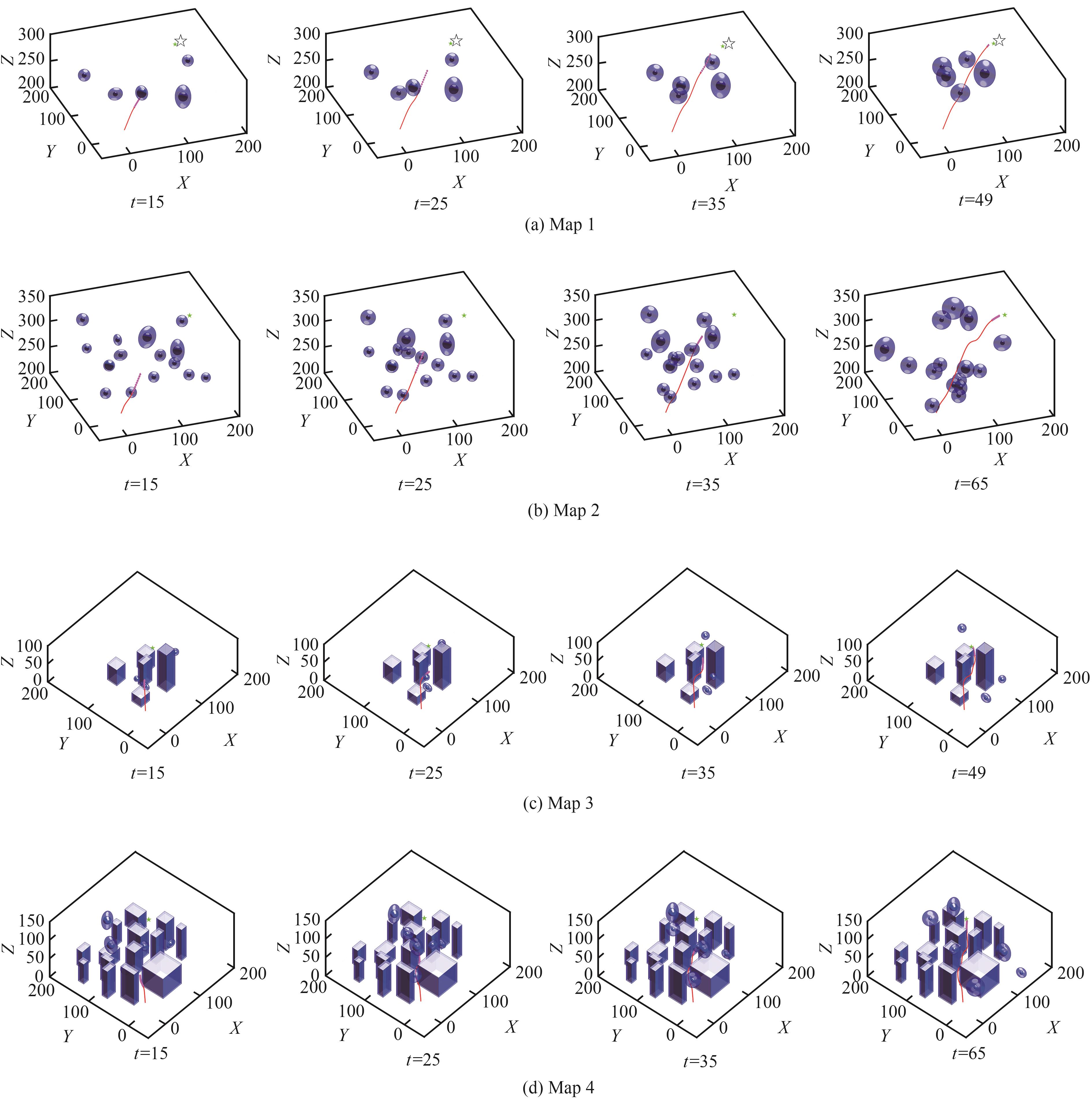
Table 2
Simulation settings for different maps
| 地图序号 | 起始点 | 目标点 |
|---|---|---|
| Map 1 | [10 10 200] | [130 100 300] |
| Map 2 | [10 10 200] | [180 140 300] |
| Map 3 | [10 10 10] | [130 100 20] |
| Map 4 | [10 10 10] | [180 140 20] |
Table 3
Comparison of performance metric between MPC and CC-MPC under different maps
| 性能指标 | Map 1 | Map 2 | Map 3 | Map 4 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| MPC | CC-MPC | MPC | CC-MPC | MPC | CC-MPC | MPC | CC-MPC | ||||
| Av.CT | 0.022 | 0.036 | 0.044 | 0.059 | 0.031 | 0.071 | 0.086 | 0.131 | |||
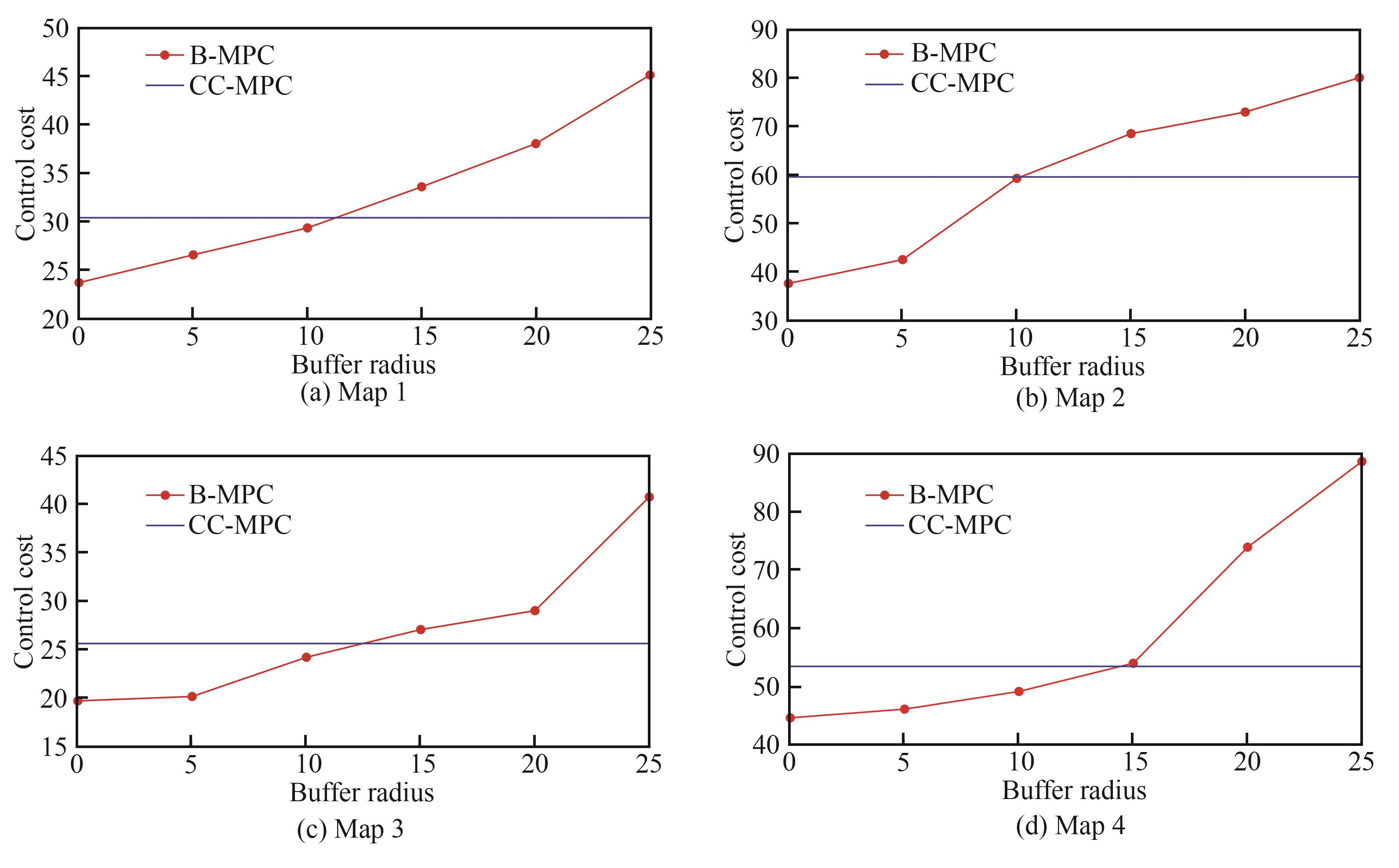
| CC | 24.657 | 30.361 | 37.709 | 59.617 | 19.660 | 25.582 | 44.635 | 53.478 | |||
| FR | 0.313 | 0.022 | 0.535 | 0.041 | 0.516 | 0.032 | 0.704 | 0.025 | |||
Fig.8
Comparison of failure rates between B-MPC and CC-MPC under different buffer radii
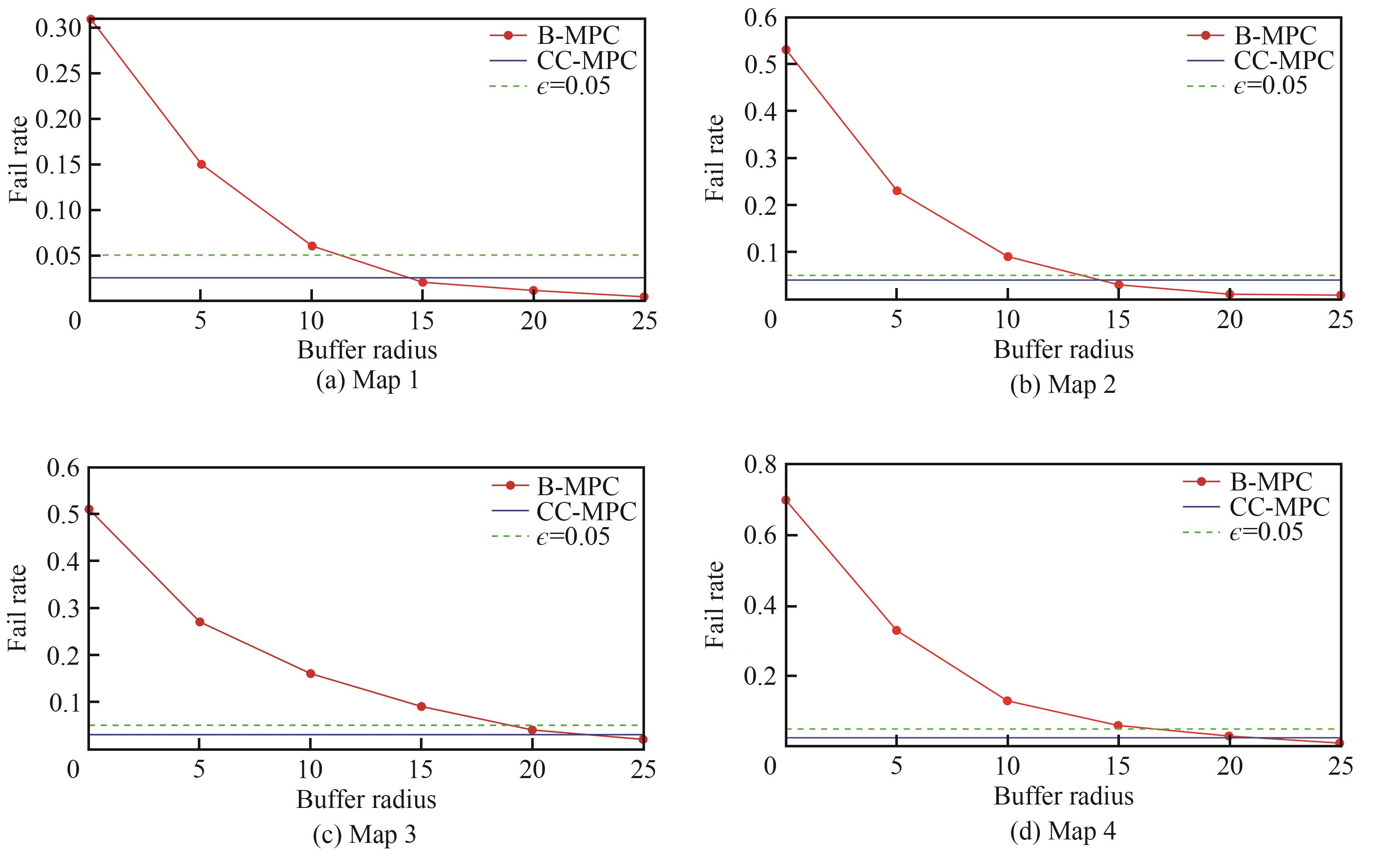
Fig.9
Comparison of control cost between B-MPC and CC-MPC under different buffer radii
| [1] | THIPPHAVONG D P, APAZA R, BARMORE B, et al. Urban air mobility airspace integration concepts and considerations: AIAA-2018-3676[R]. Reston: AIAA, 2018. |
| [2] | BARRETT-GONZALEZ R M, DENNELER M, SCHWAB Z, et al . Designing eVTOL and UAM aircraft for flight safety, EMP, and HIRF resistance EMI, certification FAA, insurability, ground safety and community acceptance[C]∥AIAA Aviation 2023 Forum. Reston: AIAA, 2023. |
| [3] | 余莎莎, 陈星雨, 西华大学. 城市空中交通领域关键技术创新与挑战[J]. 航空学报, 2024, 45(): 730657. |
| YU S S, CHEN X Y, XI H. Key technological innovations and challenges in urban air mobility[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730657. | |
| [4] | 邓景辉. 电动垂直起降飞行器的技术现状与发展[J]. 航空学报, 2024, 45(5): 529937. |
| DENG J H. Technical status and development of electric vertical take-off and landing aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529937 (in Chinese). | |
| [5] | 吕洋, 康童娜, 潘泉, 等. 无人机感知与规避: 概念、技术与系统[J]. 中国科学: 信息科学, 2019, 49(5): 520-537. |
| LÜ/LV/LU/LYU) Y, KANG T N, PAN Q, et al. UAV sense and avoidance: Concepts, technologies, and systems[J]. Scientia Sinica (Informationis), 2019, 49(5): 520-537 (in Chinese). | |
| [6] | 汤新民, 顾俊伟, 刘冰, 等. 低空监视技术及其发展趋势综述[J]. 南京航空航天大学学报, 2024, 56(6): 973-993. |
| TANG X M, GU J W, LIU B, et al. Review on low-altitude surveillance technology and its development trend[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2024, 56(6): 973-993 (in Chinese). | |
| [7] | 景晓年, 梁晓龙, 张佳强, 等. 无人机感知避让技术分析[J]. 火力与指挥控制, 2017, 42(4): 1-5. |
| JING X N, LIANG X L, ZHANG J Q, et al. Analysis of UAV sense and avoid technology[J]. Fire Control & Command Control, 2017, 42(4): 1-5 (in Chinese). | |
| [8] | 王兴隆, 王友杰. 面向城市低空的多机型eVTOL安全间隔评估[J]. 航空学报, 2025, 46(1): 330604. |
| WANG X L, WANG Y J. Safety interval evaluation for multi-aircraft eVTOL in urban low altitude[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330604 (in Chinese). | |
| [9] | ZOU Y Y, ZHANG H H, ZHONG G, et al. Collision probability estimation for small unmanned aircraft systems[J]. Reliability Engineering & System Safety, 2021, 213: 107619. |
| [10] | 薛震, 盛汉霖, 陈欣, 等. 基于剪枝可视性地图的无人机全局规划方法[J]. 航空学报, 2025, 46(10): 331279. |
| XUE Z, SHENG H L, CHEN X, et al. Global planning method for UAVs based on pruned visibility map[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 331279 (in Chinese). | |
| [11] | 郭华, 郭小和. 改进速度障碍法的无人机局部路径规划算法[J]. 航空学报, 2023, 44(11): 327586. |
| GUO H, GUO X H. Local path planning algorithm for UAV based on improved velocity obstacle method[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 327586 (in Chinese). | |
| [12] | HART P E, NILSSON N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| [13] | KARAMAN S, WALTER M R, PEREZ A, et al. Anytime motion planning using the RRT[C]∥2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2011: 1478-1483. |
| [14] | BETTS J T, CAMPBELL S, DIGIROLAMO C. Examination of solving optimal control problems with delays using GPOPS-Ⅱ[J]. Numerical Algebra, Control & Optimization, 2021, 11(2): 283. |
| [15] | OSBORNE M R. On shooting methods for boundary value problems[J]. Journal of Mathematical Analysis and Applications, 1969, 27(2): 417-433. |
| [16] | WANG Z P, ZHOU X, XU C, et al. Geometrically constrained trajectory optimization for multicopters[J]. IEEE Transactions on Robotics, 2022, 38(5): 3259-3278. |
| [17] | JANSON L, SCHMERLING E, PAVONE M. Monte Carlo motion planning for robot trajectory optimization under uncertainty[M]∥Robotics Research. Cham: Springer International Publishing, 2017: 343-361. |
| [18] | CALAFIORE G, CAMPI M C. Uncertain convex programs: Randomized solutions and confidence levels[J]. Mathematical Programming, 2005, 102(1): 25-46. |
| [19] | BLACKMORE L, ONO M, BEKTASSOV A, et al. A probabilistic particle-control approximation of chance-constrained stochastic predictive control[J]. IEEE Transactions on Robotics, 2010, 26(3): 502-517. |
| [20] | WU P C, YANG X X, WEI P, et al. Safety assured online guidance with airborne separation for urban air mobility operations in uncertain environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19413-19427. |
| [21] | LUDERS B, KOTHARI M, HOW J. Chance constrained RRT for probabilistic robustness to environmental uncertainty[C]∥AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010. |
| [22] | SAFAOUI S, GRAVELL B J, RENGANATHAN V, et al. Risk-averse RRT* planning with nonlinear steering and tracking controllers for nonlinear robotic systems under uncertainty[C]∥2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2021: 3681-3688. |
| [23] | BLACKMORE L, ONO M, WILLIAMS B C. Chance-constrained optimal path planning with obstacles[J]. IEEE Transactions on Robotics, 2011, 27(6): 1080-1094. |
| [24] | WU P C, XIE J F, CHEN J. Safe path planning for unmanned aerial vehicle under location uncertainty[C]∥2020 IEEE 16th International Conference on Control & Automation (ICCA). Piscataway: IEEE Press, 2020: 342-347. |
| [25] | WAKABAYASHI T, SUZUKI S. Dynamic obstacle avoidance for multi-rotor UAV using chance-constraints based on obstacle velocity[J]. Robotics and Autonomous Systems, 2023, 160: 104320. |
| [26] | ZHANG X X, MA J, CHENG Z L, et al. Trajectory generation by chance-constrained nonlinear MPC with probabilistic prediction[J]. IEEE Transactions on Cybernetics, 2021, 51(7): 3616-3629. |
| [27] | KURZHANSKI A B, VARAIYA P. Ellipsoidal techniques for reachability analysis[C]∥Hybrid Systems: Computation and Control. Berlin: Springer, 2000: 202-214. |
| [1] | Yujie YUAN, Jiashuai LI, Xinyi ZHAO, Yantao WANG. eVTOL scheduling schemes for dynamic demand and variable intervals [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(1): 631907-631907. |
| [2] | Xudong LI, Wei ZHONG, Zhen WANG, Tongguang WANG, Jinlong LI. Ratio of propeller thrust to total thrust of ducted propellers [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 230829-230829. |
| [3] | Yongze MIAO, Xinggang FAN, Dawei LI, Wei SUN, Lihao HUANG, Shengqiao HAO, Haiyang FANG, Ronghai QU, Yancheng YOU. Research advances in electrical propulsion systems for electric vertical take-off and landing aircrafts: A comprehensive review [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 332000-332000. |
| [4] | Jianye SUN, Dong YE, Yan XIAO. Active observation trajectory planning for non-cooperative spacecraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331587-331587. |
| [5] | Jufeng YANG, Wenxin HUANG, Jiukang SUN, Zhongchen MA, Guodong FAN, Xi ZHANG. Joint estimation of multidimensional battery health indicators for electric vertical take-off and landing aircraft applications [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(14): 331440-331440. |
| [6] | Jianjian LIANG, Shoukun WANG, Shaoming HE. Segmented action guidance strategy for autonomous shipborne landing of fixed-wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531116-531116. |
| [7] | Yuhan LI, Shuguang ZHANG, Yibing WU. Handling qualities assessing of SVO-based eVTOL aircraft through EMG and eye data [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531315-531315. |
| [8] | Menglong DING, Daochun LI, Yaoming ZHOU, Chuanyan FENG, Haoyuan SHAO, Jinwu XIANG. Crashworthiness analysis and optimization for eVTOL vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531282-531282. |
| [9] | Ziyi ZONG, Xin DONG, Zhan TU, Jinwu XIANG. Countermeasures against uncooperative drones based on swarm encirclement [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531349-531349. |
| [10] | Changxiao ZHAO, Yixuan SUN. A safe scheduling model for eVTOL avionics systems for airworthiness requirements [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531252-531252. |
| [11] | Xinglong WANG, Youjie WANG. Safety interval evaluation for multi-aircraft eVTOL in urban low altitude [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330604-330604. |
| [12] | Shasha YU, Xingyu CHEN. Key technological innovations and challenges in urban air mobility [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730657-730657. |
| [13] | Yunpeng CAI, Dapeng ZHOU, Jiangchuan DING. Intelligent collaborative control of UAV swarms with collision avoidance safety constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529683-529683. |
| [14] | Jinghui DENG. Technical status and development of electric vertical take⁃off and landing aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529937-529937. |
| [15] | Bochen LI, Shuangcheng NIU, Lu DING, Chenggang WANG, Lei SONG, Yuqiang JIN. Unmanned group resilient motion planning for attacking sea surface targets [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 329455-329455. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341