Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (15): 331587.doi: 10.7527/S1000-6893.2024.31587
• Electronics and Electrical Engineering and Control • Previous Articles
Jianye SUN, Dong YE( ), Yan XIAO
), Yan XIAO
Received:2024-11-29
Revised:2025-01-06
Accepted:2025-02-19
Online:2025-03-06
Published:2025-02-28
Contact:
Dong YE
E-mail:yed@hit.edu.cn
Supported by:CLC Number:
Jianye SUN, Dong YE, Yan XIAO. Active observation trajectory planning for non-cooperative spacecraft[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331587.
Table 1
Parameters of non-cooperative observation simulation scenarios
| 参数类型 | 漂移解轨道初值 | 周期解轨道初值 |
|---|---|---|
| 目标初始状态 | ||
| 目标协方差 | ||
| 服务航天器初始状态 |

Fig.1
State gain reachable set
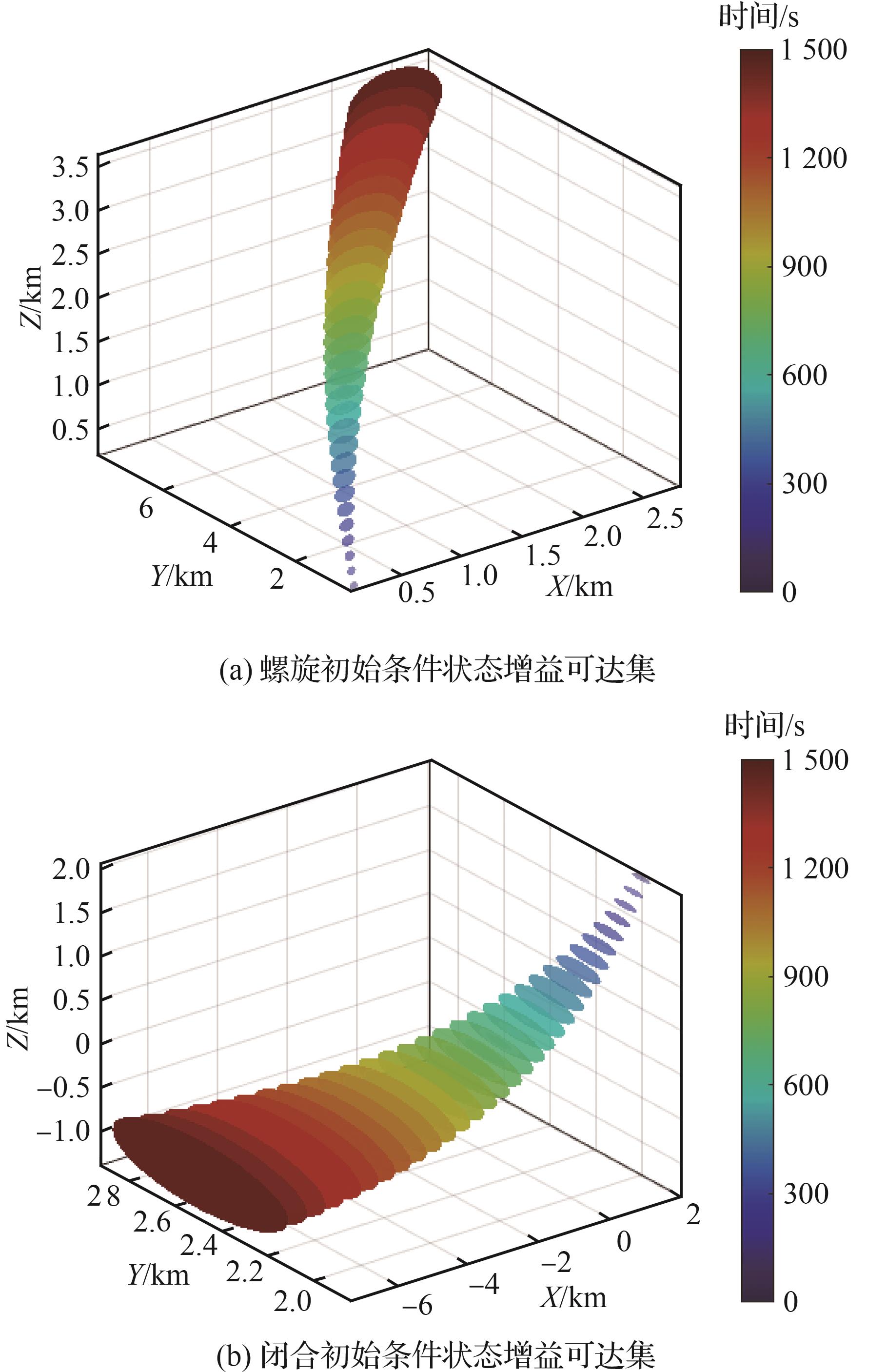

Fig.2
Monte Carlo simulation of state gain reachable set
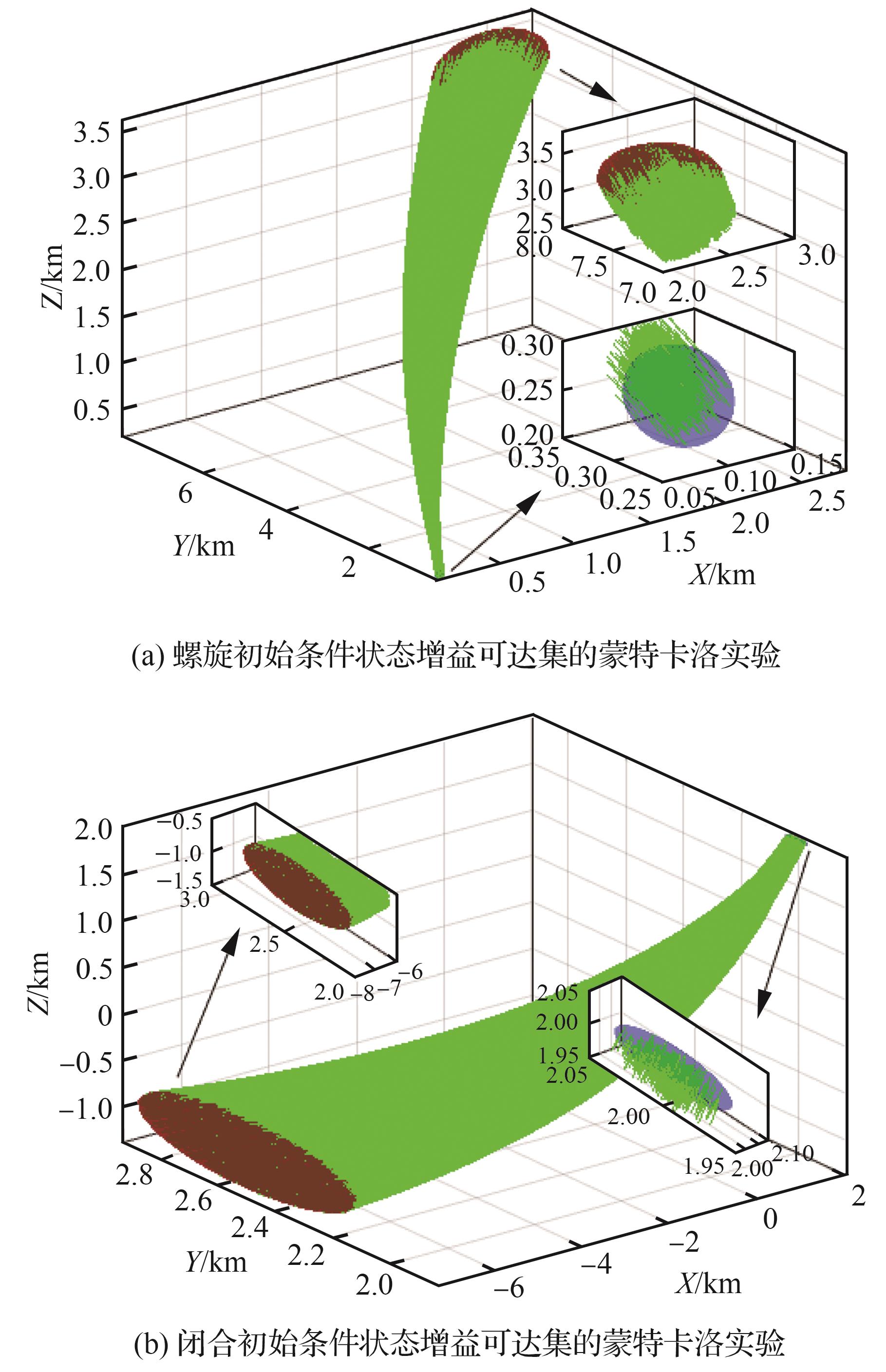
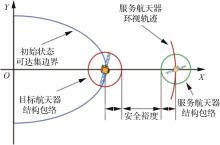
Fig.3
Illustration of safe collision avoidance strategy

Fig.4
Exact solution of safe collision avoidance ellipsoid
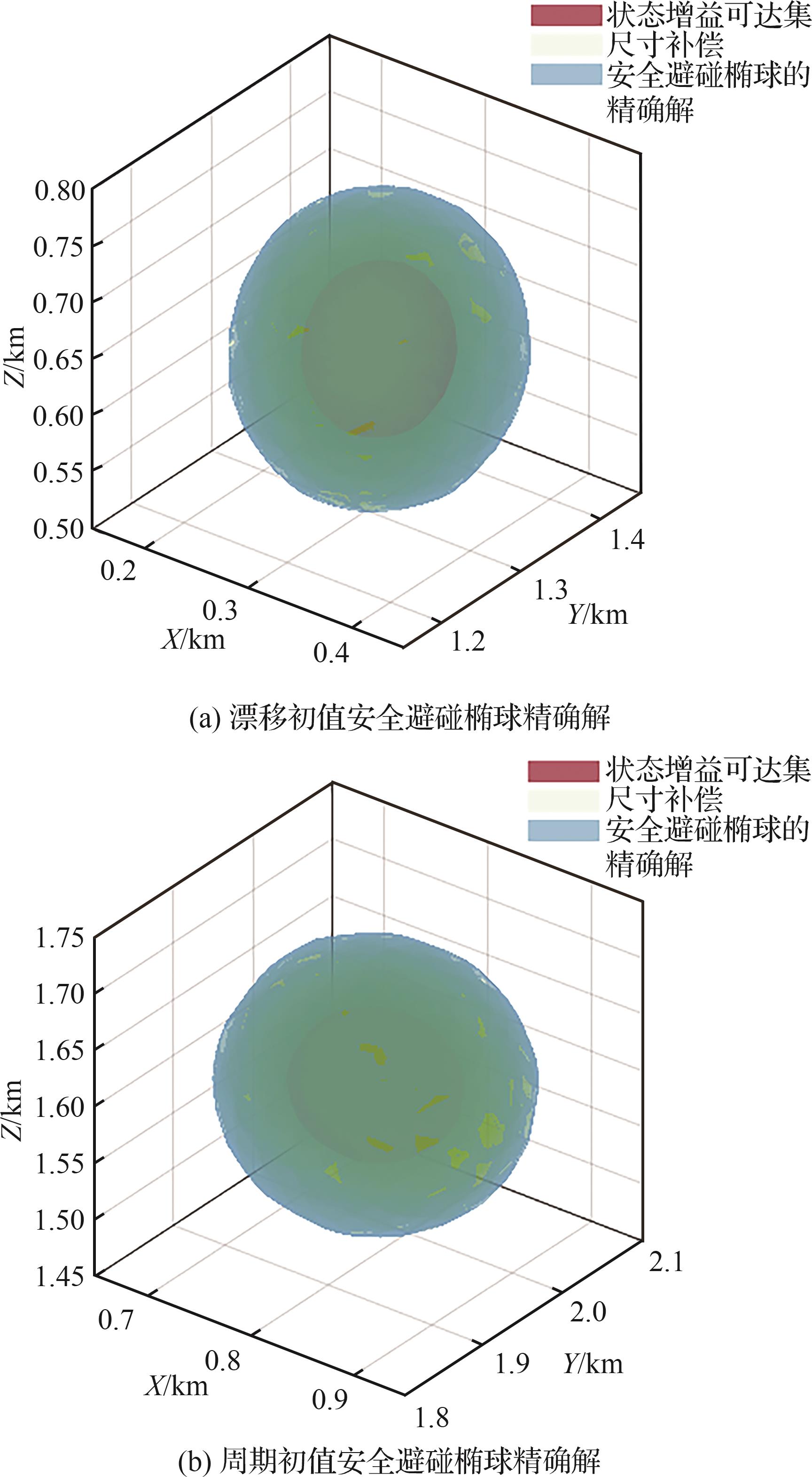
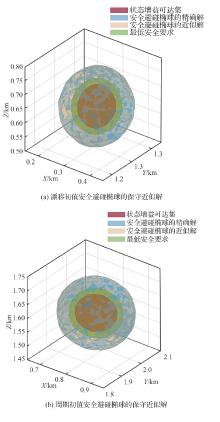
Fig.5
Conservative approximation solution of safe collision avoidance ellipsoid
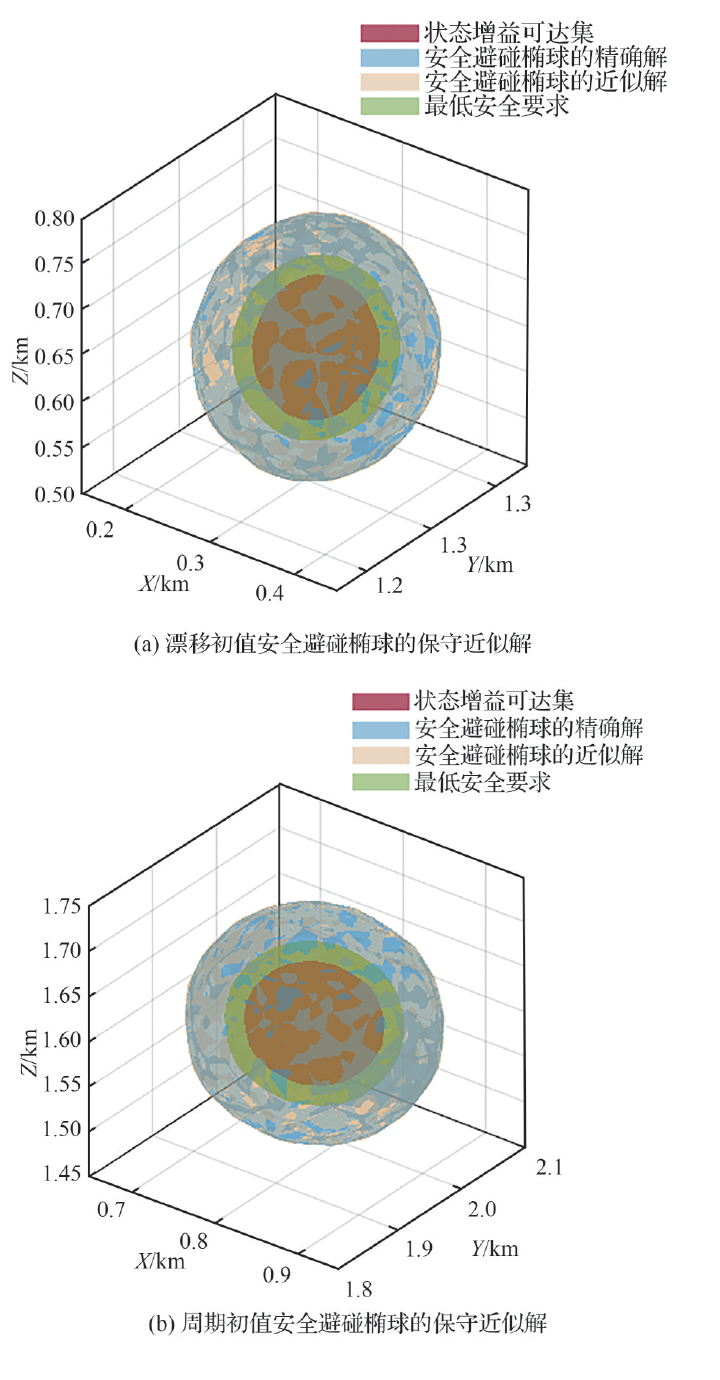
Table 2
Comparison of Computational Efficiency of Safety Strategies
| 安全策略 | 计算效率 | 漂移解 初值 | 周期解 初值 |
|---|---|---|---|
| 状态增益可达集 | 计算耗时/ | 0.036 993 | 0.031 149 |
| 安全避碰椭球 | 优化容错距离 | 38.910 | 38.899 |
| 近似解计算耗时/ | 0.042 362 | 0.050 129 | |
| 精确解计算耗时/ | 20.605 | 20.008 |

Fig.6
Illustration of Active Observation Trajectory for Non-Cooperative Spacecraft
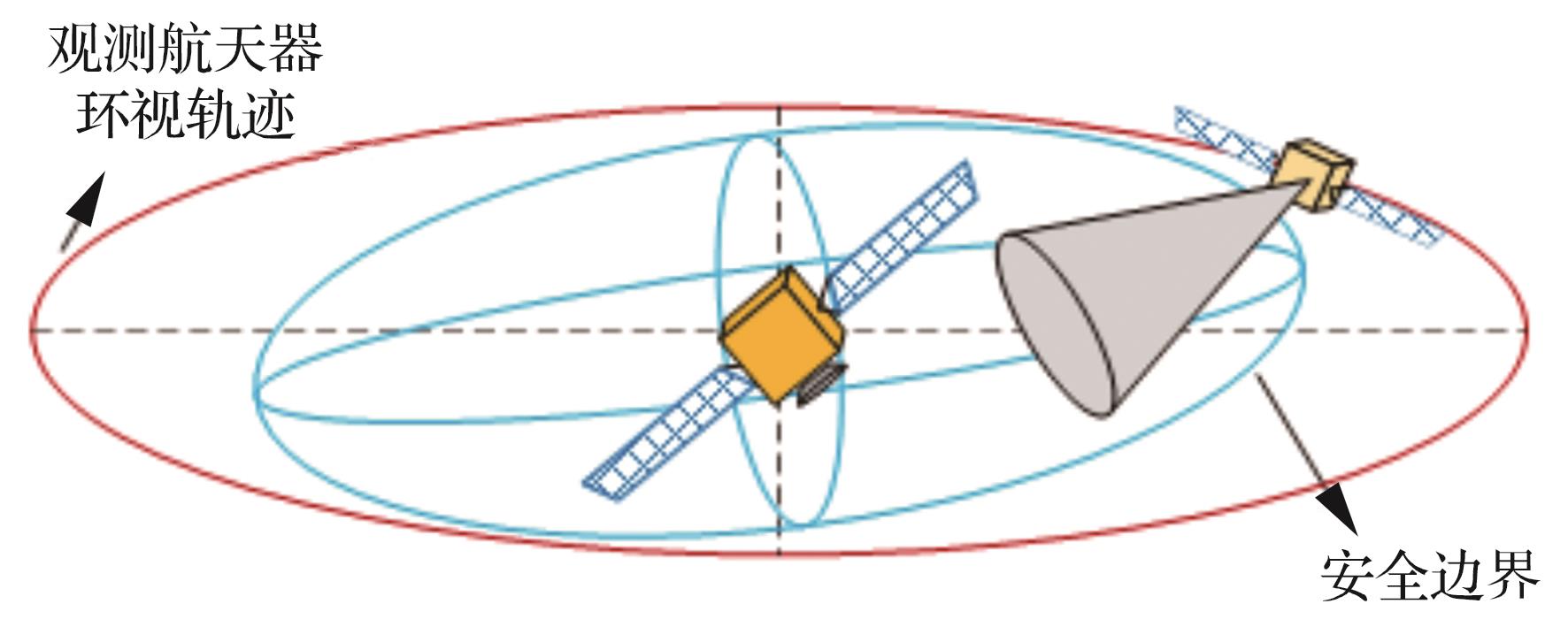

Fig.7
Safe collision avoidance ellipsoid and path points distribution
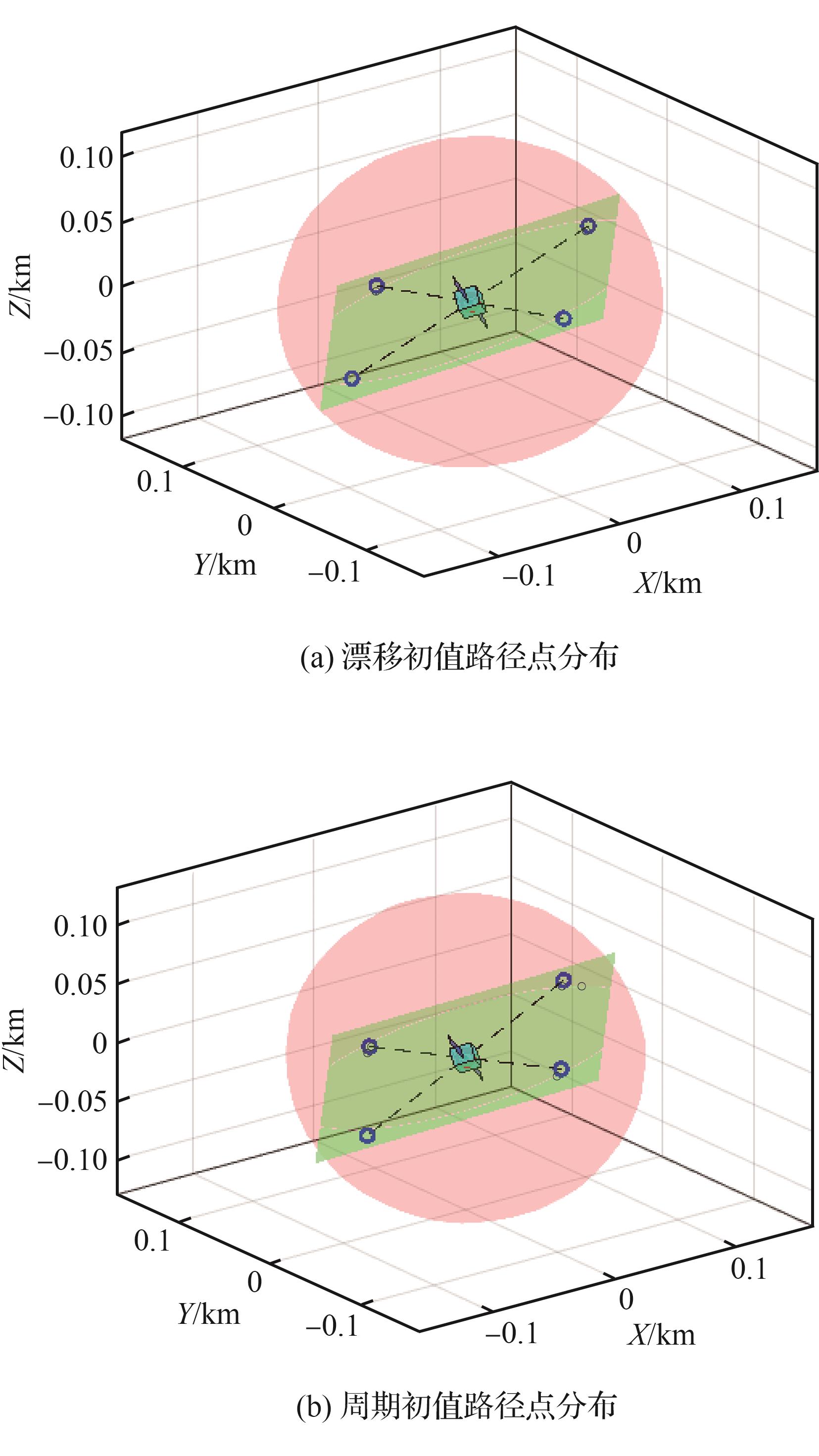

Fig.8
Safety avoidance strategies and absolute trajectories of active observation for non-cooperative target
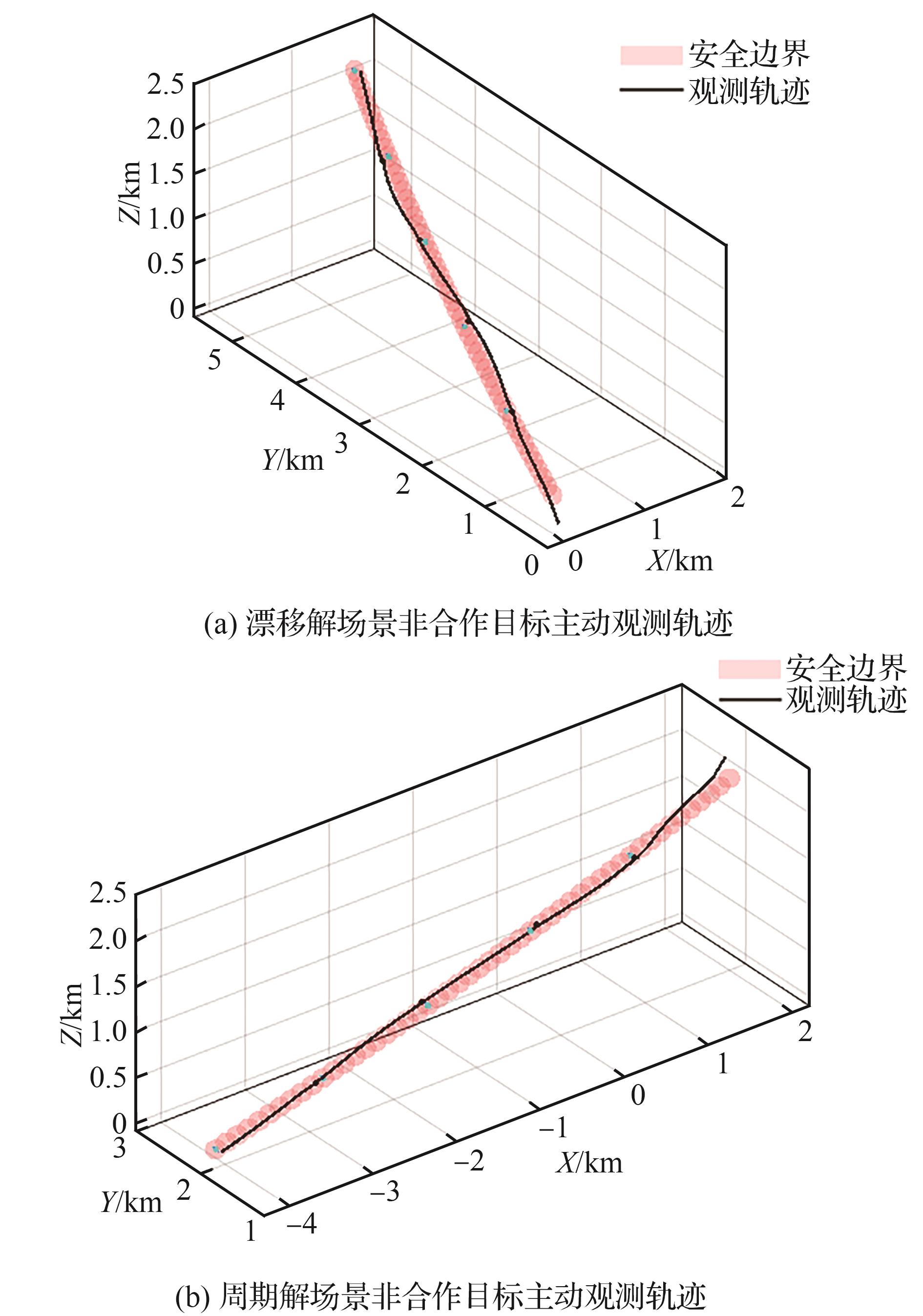
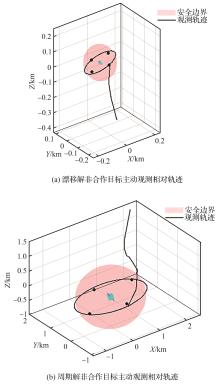
Fig.9
Safety avoidance strategies and relative trajectories of active observation for non-cooperative target
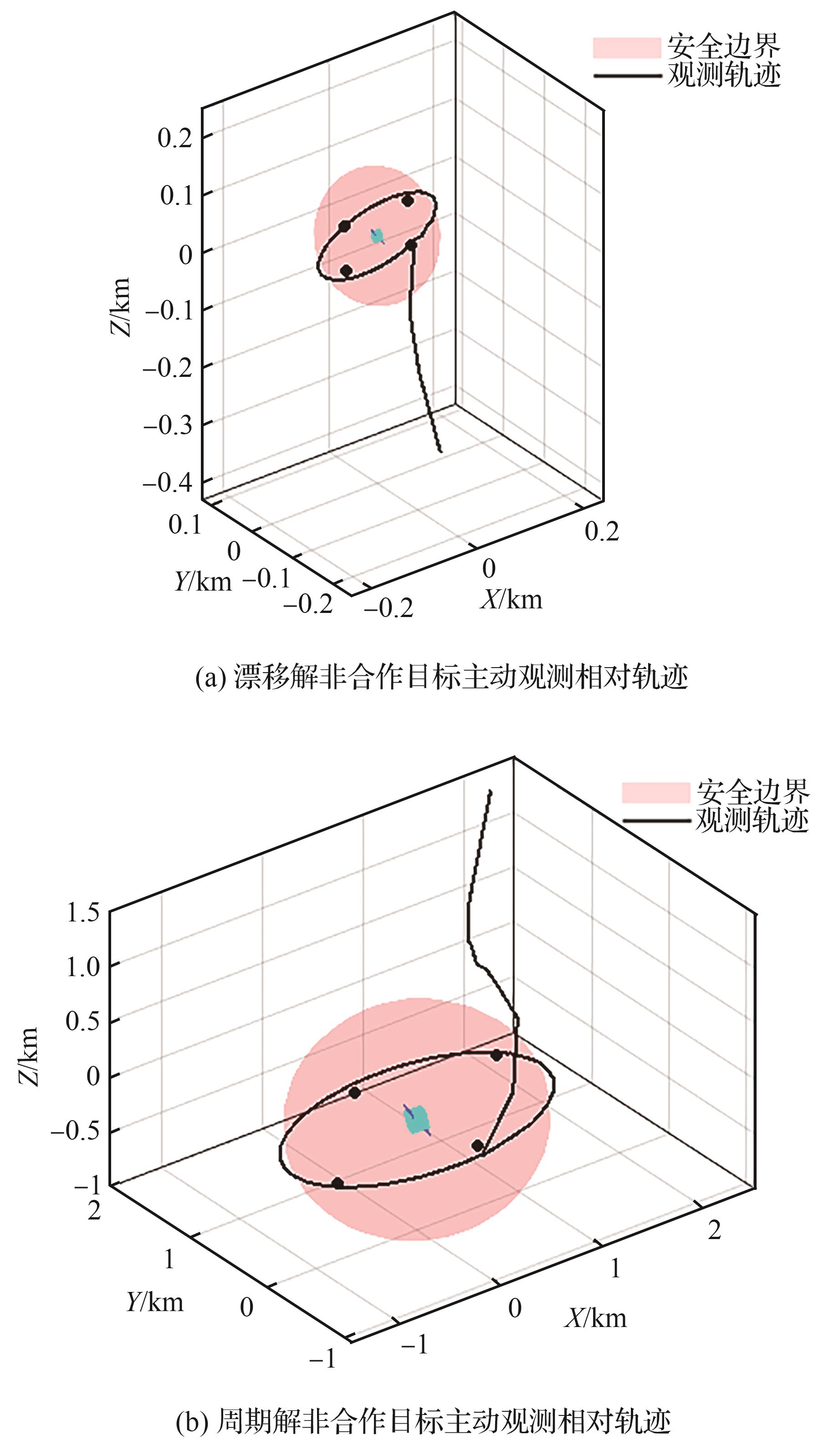

Fig.10
Comparison of trajectory planning results between Primal-Barrier-based FMPC and Fmincon explicit MPC
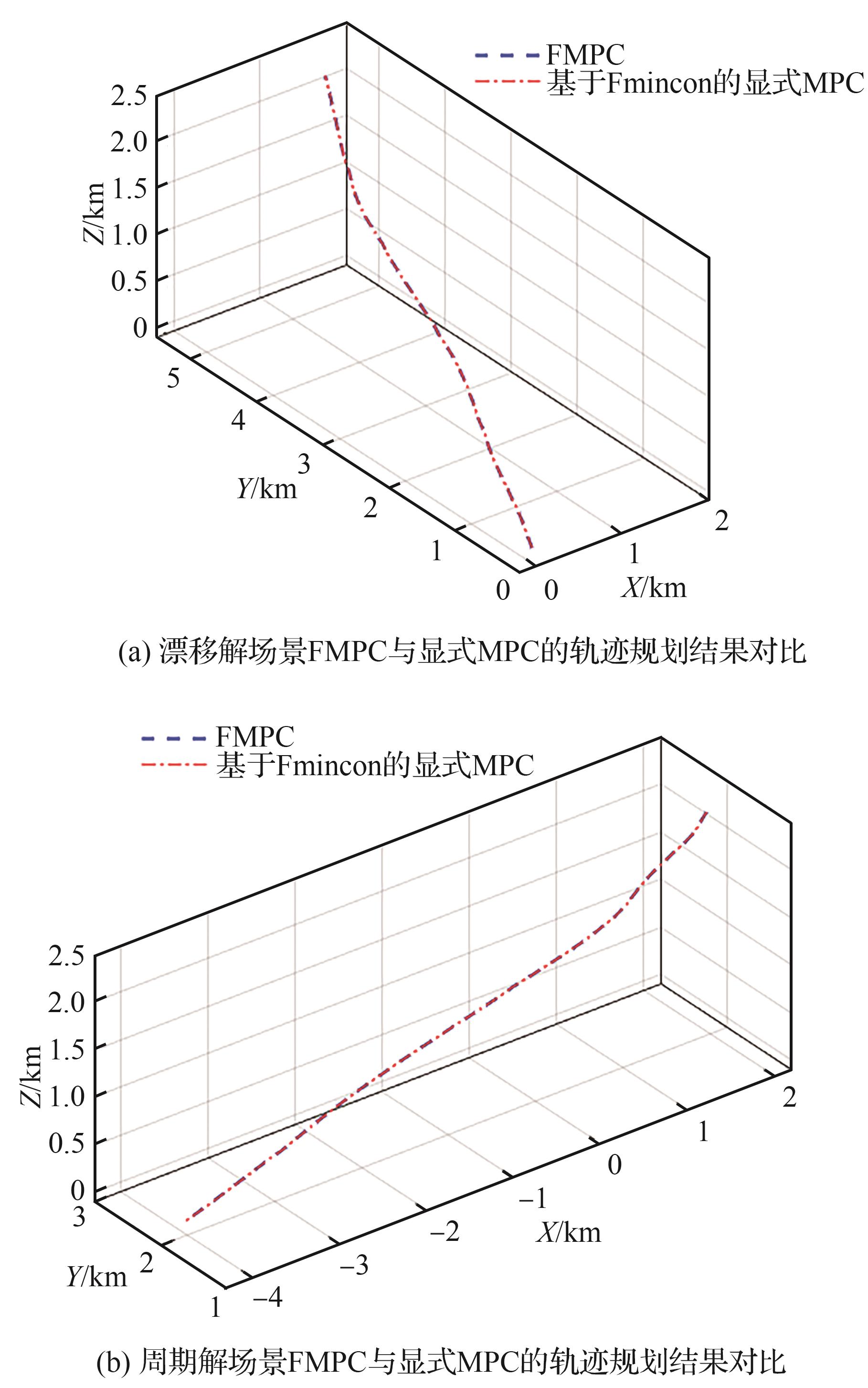

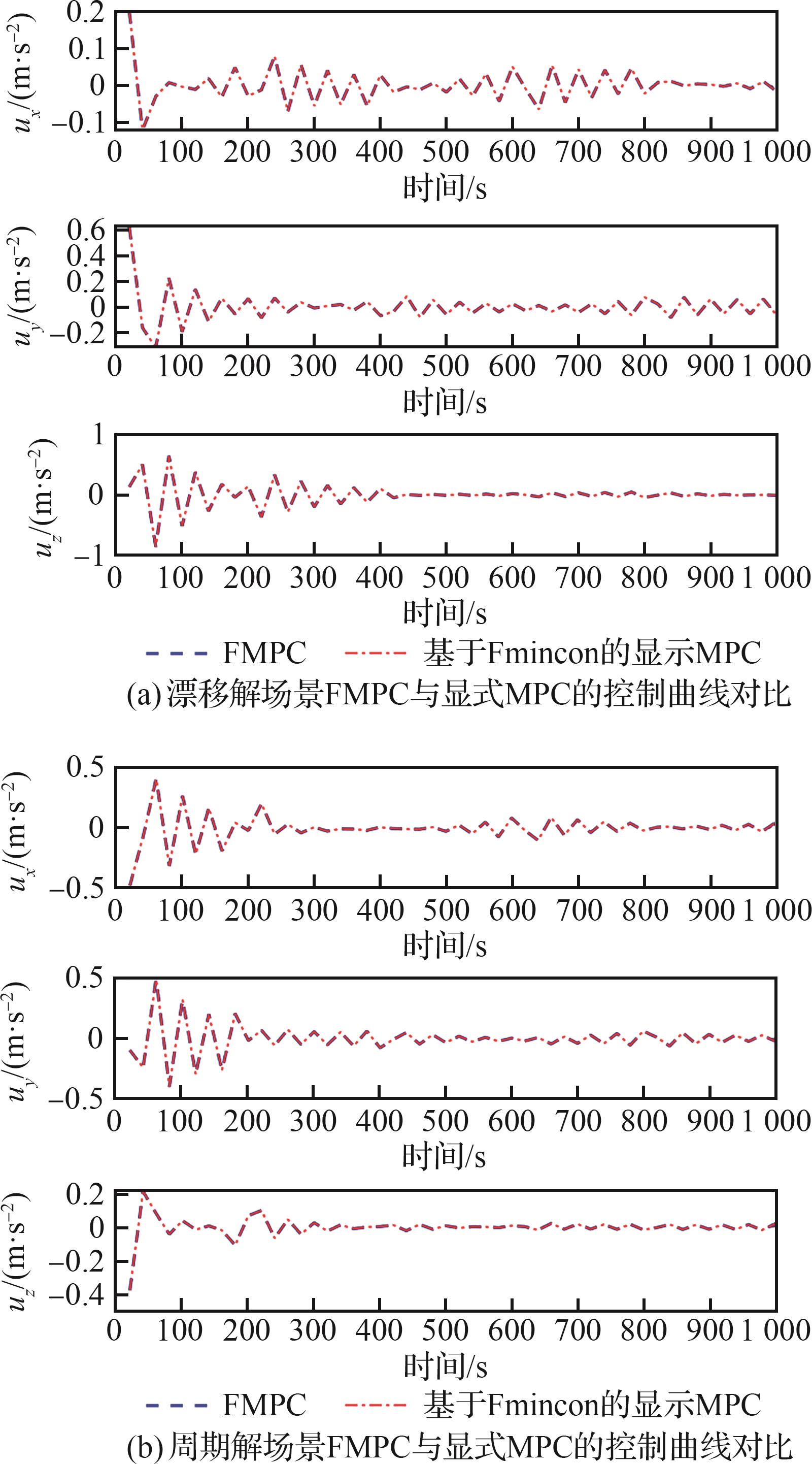
Fig.11
Comparison of control curves between primal-barrier-based FMPC and Fmincon explicit MPC
| [1] | FRIEND R B. Orbital express program summary and mission overview[C]∥Sensors and Systems for Space Applications II. San Francisco: SPIE, 2008: 6958. |
| [2] | WEISMULLER T, LEINZ M. GN & C technology demonstrated by the orbital express autonomous rendezvous and capture sensor system[C]∥29th annual AAS guidance and control conference. San Francisco: AAS, 2006: 4-8. |
| [3] | GAYLOR D E, BARBEE B W.Algorithms for safe spacecraft proximity operations[J].Advances in the Astronautical Sciences, 2007, 127: 133-152. |
| [4] | GELLER D K, OSHMAN Y. Negative collision measurements in position/velocity state estimation[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 1015-1022. |
| [5] | DENENBERG E, GURFIL P. Debris avoidance maneuvers for spacecraft in a cluster[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(6): 1428-1440. |
| [6] | WOODFORD N T, HARRIS M W, Petersen C D. Spherically constrained relative motion trajectories in low earth orbit[J]. Journal of Guidance, Control, and Dynamics, 2023, 46(4): 666-679. |
| [7] | WEISS A, PETERSEN C, BALDWIN M, et al. Safe positively invariant sets for spacecraft obstacle avoidance[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(4): 720-732. |
| [8] | KURZHANSKI A, VÁLYI I. Ellipsoidal calculus for estimation and control[M]. Boston: Birkhäuser, 1997: 27-32. |
| [9] | WEN C, GURFIL P. Relative reachable domain for spacecraft with initial state uncertainties[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(3): 462-473. |
| [10] | JIA-RICHARDS O, LOZANO P C. Analytical Maneuver Library for Remote Inspection with an Underactuated Spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(4): 611-622. |
| [11] | 张鸿林, 罗建军, 马卫华. 基于机器学习的航天器规避目标威胁博弈决策[J]. 航空学报, 2024, 45(8): 329136. |
| ZHANG H L, LUO J J, MA W H. Spacecraft game decision making for threat avoidance of space targets based on machine learning[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(8): 329136 (in Chinese). | |
| [12] | 张海涛, 王伟林, 张雅声, 等. 地球静止轨道航天器绕飞持续观测任务轨迹规划与控制[J]. 国防科技大学学报, 2024, 46(01): 74-86. |
| ZHANG H T, WANG W L, ZHANG Y S, et al. Trajectory planning and control of continuous observation missions for geosynchronous orbit spacecraft fly-around[J]. Journal of National University of Defense Technology, 2024, 46(1): 74-86 (in Chinese). | |
| [13] | FAGHIHI S, TAVANA S, DE RUITER A H J. Optimal pose design for close-proximity on-orbit inspection[J]. Journal of Guidance, Control, and Dynamics, 2024, 47(4): 609-622. |
| [14] | FU J, CHEN L, ZHANG D, et al. Disturbance observer-based prescribed performance predictive control for spacecraft on-orbit inspection[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(10): 1873-1889. |
| [15] | NAKKA Y K, HÖNIG W, CHOI C, et al. Information-based guidance and control architecture for multi-spacecraft on-orbit inspection[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(7): 1184-1201. |
| [16] | 殷泽阳, 邢友朋, 韩飞, 等. 编队航天器协同绕飞非合作目标的全驱预设性能控制[J]. 航空学报, 2024, 45(1): 628904. |
| YIN Z Y, XING Y P, HAN F, et al. Fully-actuated prescribed performance control of spacecraft formation for flying cooperatively around non-cooperative target[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628904 (in Chinese). | |
| [17] | 李传江, 闫慧达, 郭延宁, 等. 混合空间目标下的多航天器抵近观测任务规划[J]. 宇航学报, 2023, 44 (12): 1871-1882. |
| LI C J, YAN H D, GUO Y N, et al. Mission Planning for Multiple Spacecraft Inspection of Mixed space Targets in Proximity [J]. Journal of Astronautics, 2023, 44 (12): 1871-1882 (in Chinese). | |
| [18] | 李敏, 袁利, 魏春岭. 基于混合状态机的航天器自主绕飞多模态控制[J]. 航空学报, 2023, 44(18): 328296. |
| LI M, YUAN L, WEI C L. Spacecraft autonomous fly-around multi-mode control based on hybrid state machine[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 328296 (in Chinese). | |
| [19] | YAN B, ZHANG J, LUO Y. Approximation of optimal impulsive flyby transfer with terminal inspection constraints[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(10): 1963-1972. |
| [20] | MAESTRINI M, DI LIZIA P. Guidance strategy for autonomous inspection of unknown non-cooperative resident space objects[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(6): 1126-1136. |
| [21] | HIBBARD M, CUBUKTEPE M, SHUBERT M, et al. Trajectory synthesis for the coordinated inspection of a spacecraft with safety guarantees[J]. Journal of Guidance, Control, and Dynamics, 2023, 46(12): 2245-2264. |
| [22] | ZAGARIS C, PARK H, VIRGILI-LLOP J, et al. Model predictive control of spacecraft relative motion with convexified keep-out-zone constraints[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(9): 2054-2062. |
| [23] | BASHNICK C, ULRICH S. Fast model predictive control for spacecraft rendezvous and docking with obstacle avoidance[J]. Journal of Guidance, Control, and Dynamics, 2023, 46(5): 998-1007. |
| [24] | WANG Y, BOYD S. Fast model predictive control using online optimization[J]. IEEE Transactions on control systems technology, 2009, 18(2): 267-278. |
| [25] | YE D, SUN J, XIAO Y, et al. Energy optimal guidance for proximity approach with obstacle avoidance[J]. Aerospace Science and Technology, 2022, 130: 107949. |
| [26] | ROCKAFELLAR, TYRELL R. Convex analysis[M]. Princeton: Princeton University Press, 2015: 147-153. |
| [1] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [2] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [3] | Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879-530879. |
| [4] | Junzhi LI, Teng LONG, Jingliang SUN, Hongyu MIAO, Zhenlin ZHOU. Differential flatness-based spatial-temporal hierarchical trajectory planning for fixed-wing UAVs in urban environments [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531369-531369. |
| [5] | Weicheng DI, Jinkui XU, Zixing WEI, Jinwu XIANG, Zhan TU. Aerial-ground heterogeneous cooperation based on multi-round task allocation method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531348-531348. |
| [6] | Yumei HU, Quan PAN, Bao DENG. A Fisher information based adaptive filtering algorithm for sensor trajectory planning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 629825-629825. |
| [7] | Zhe LIU, Xige ZHANG, Changzhu WEI, Naigang CUI. High-precision adaptive convex programming for reentry trajectories of suborbital vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729430-729430. |
| [8] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [9] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [10] | Gang LEI, Wei LUO, Yunshu LI, Canhui LAI. Optimization of reentry maneuver trajectory for hypersonic glide vehicles in multiple no-fly zones [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528769-528769. |
| [11] | Qilei GUO, Weimin SANG, Junjie NIU, Ye YUAN. UAV flight strategy considering icing risk under complex meteorological conditions [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 627518-627518. |
| [12] | RAN Qingbo, XIAO Hong, YANG Fuhong, DUAN Yugang. Trajectory planning algorithm for automatic wire laying on perforated surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 425602-425602. |
| [13] | SUN Yang, CHANG Min, BAI Junqiang. Trajectory planning and control for micro-quadrotor perching on vertical surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325756-325756. |
| [14] | XIE Hua, LI Zihong, YANG Lei, ZHU Yongwen, LIU Fangzi. Optimization of four-dimensional trajectory of city pair with limited capacity [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 325581-325581. |
| [15] | XU Guangtong, WANG Zhu, CAO Yan, SUN Jingliang, LONG Teng. Dynamic-priority-decoupled UAV swarm trajectory planning using distributed sequential convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 325059-325059. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341