Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (11): 531348.doi: 10.7527/S1000-6893.2024.31348
• Articles • Previous Articles
Weicheng DI1, Jinkui XU2, Zixing WEI1, Jinwu XIANG1, Zhan TU3( )
)
Received:2024-10-08
Revised:2024-12-06
Accepted:2024-12-17
Online:2024-12-31
Published:2024-12-30
Contact:
Zhan TU
E-mail:zhantu@buaa.edu.cn
CLC Number:
Weicheng DI, Jinkui XU, Zixing WEI, Jinwu XIANG, Zhan TU. Aerial-ground heterogeneous cooperation based on multi-round task allocation method[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531348.

Fig.1
Overview of heterogeneous collaborative task allocation algorithm for aerial-ground systems
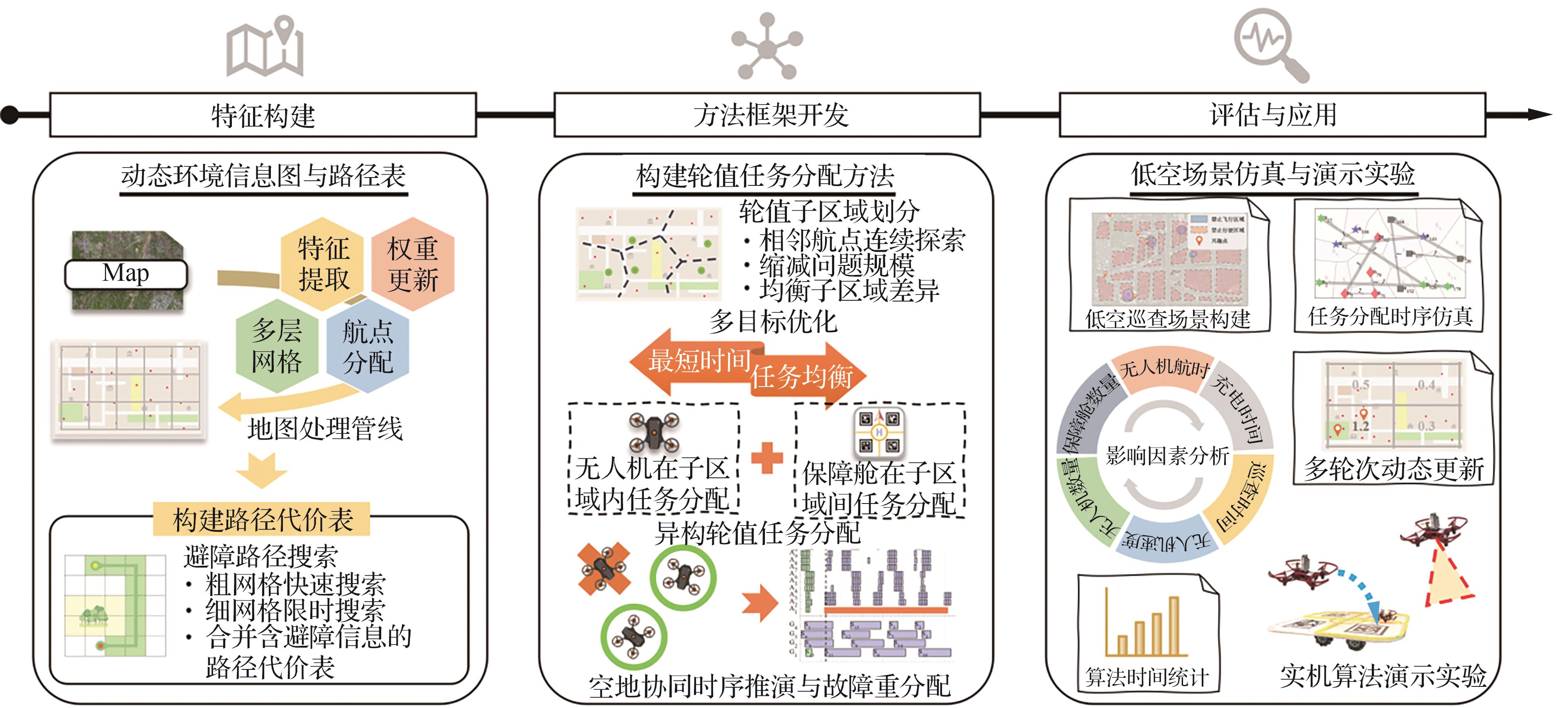

Fig.2
Dynamic updates of waypoints for different rounds
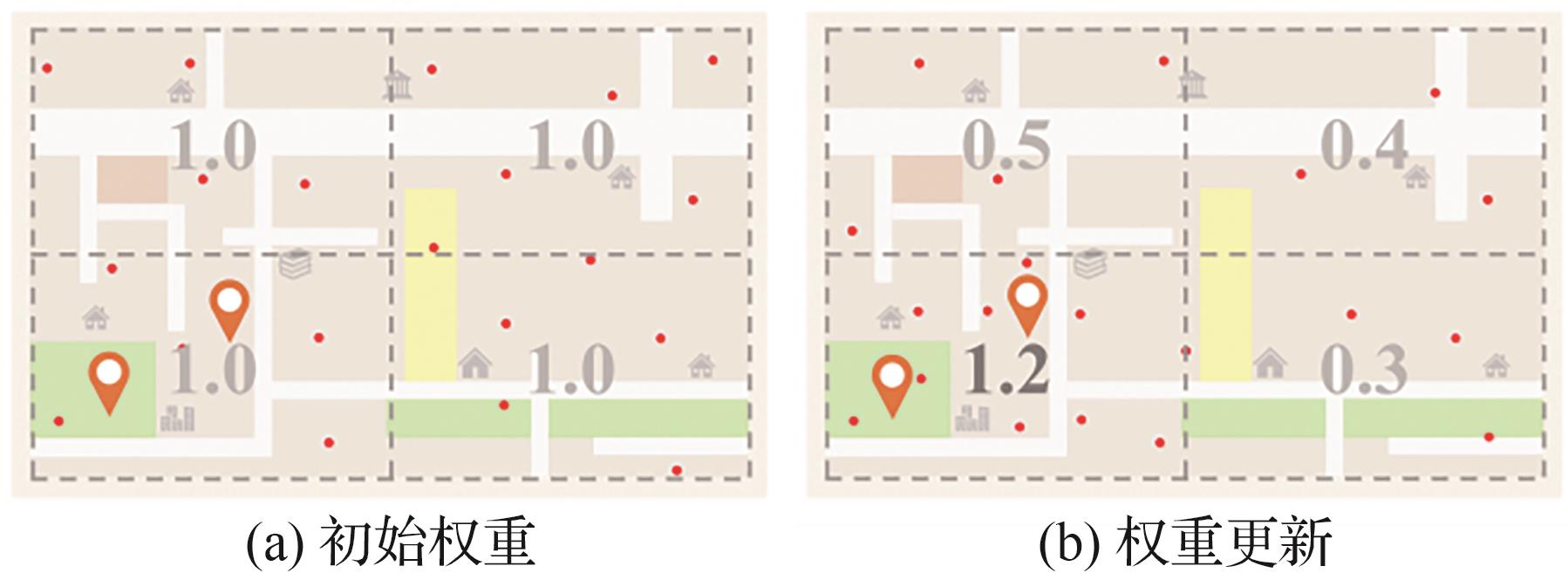
Fig.3
Schematic diagram of variable scale A* algorithm
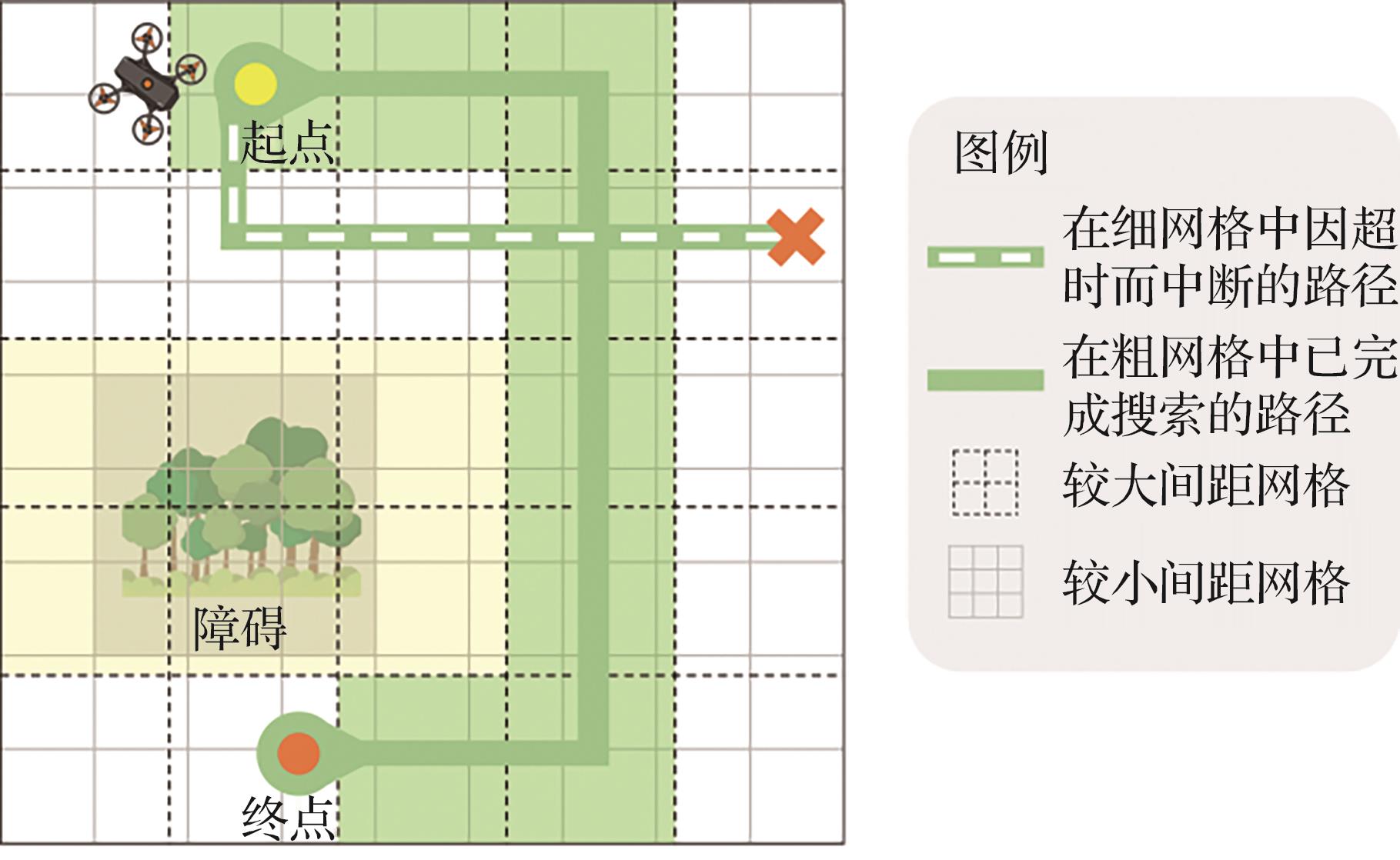

Fig.4
Schematic diagram of sub-region partitioning
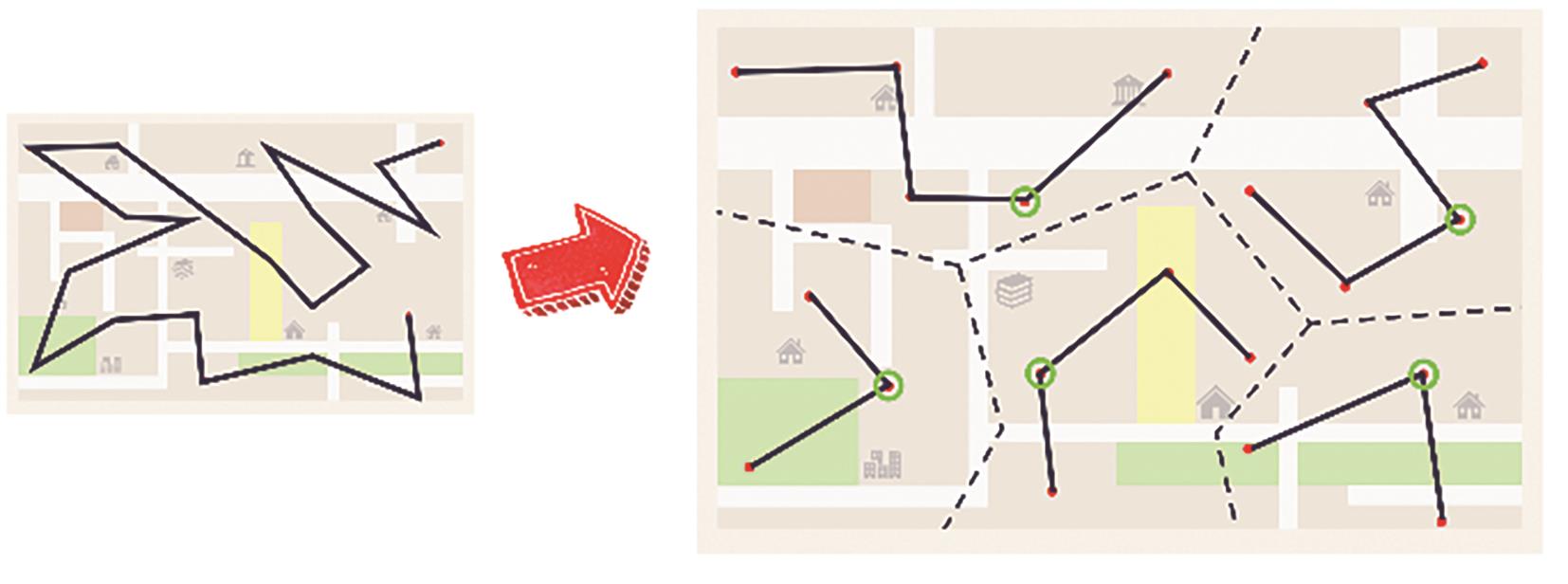
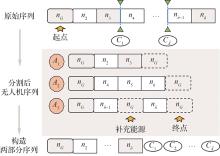
Fig.5
Schematic diagram of task allocation description
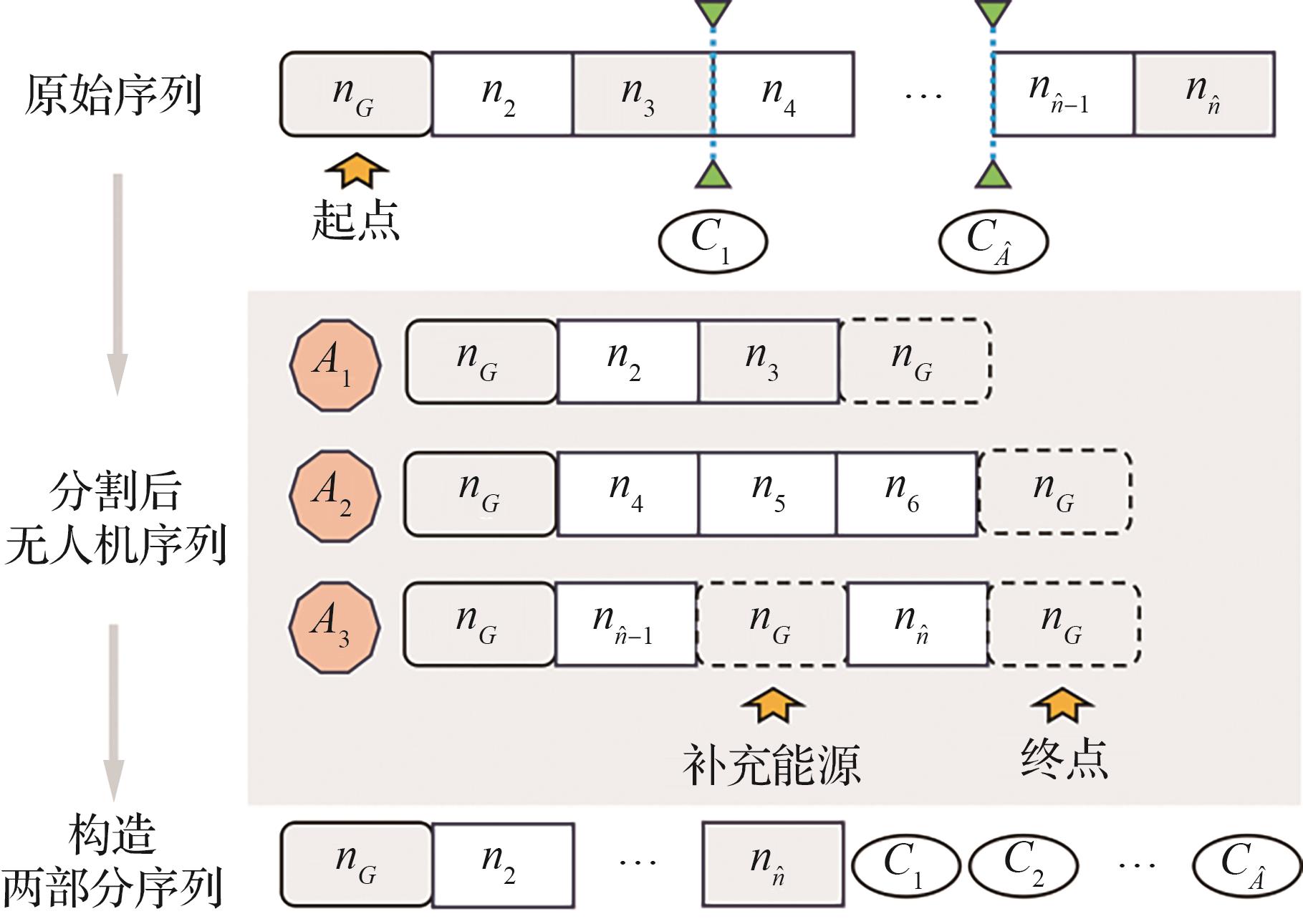
Fig.6
Optimization efficiency of different operators
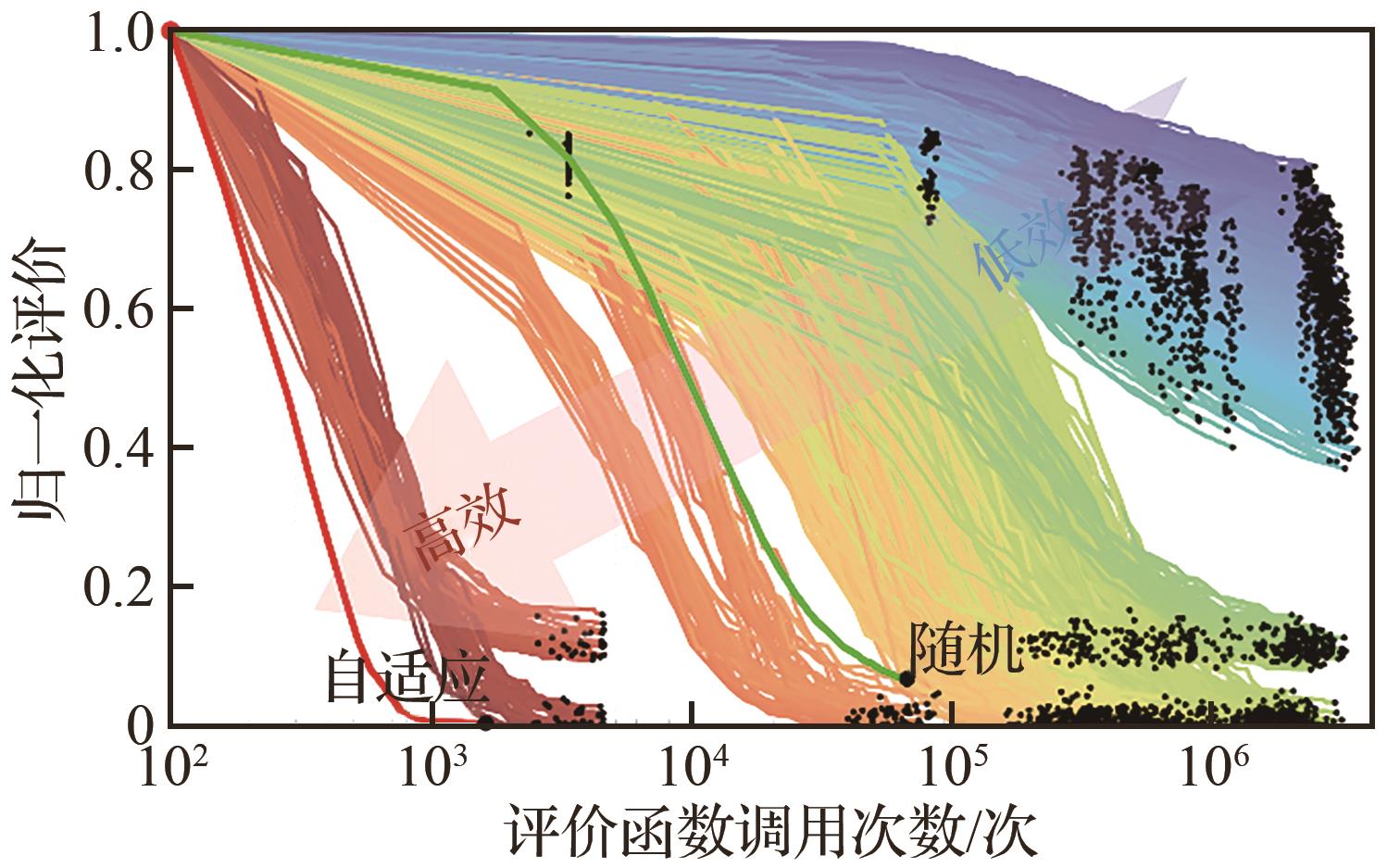
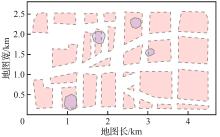
Fig.7
Information diagram of urban low-altitude patrol map
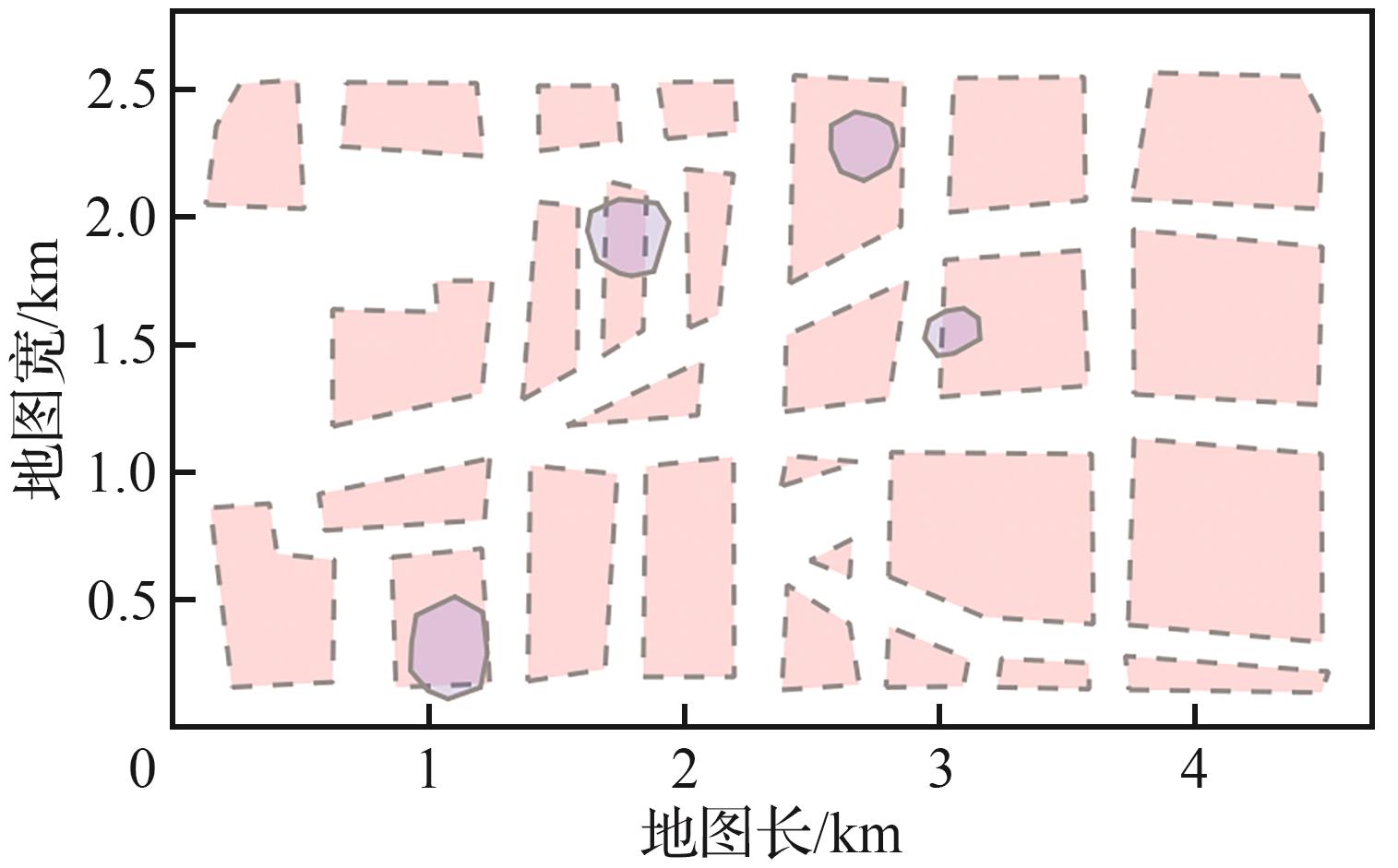
Table 1
Parameters of heterogeneous platforms in simulation experiments
| 异构平台 | 数量/个 | 速度/(m·s-1) | 续航/min | 充电时间/min |
|---|---|---|---|---|
| 保障舱 | 4 | 3.0 | ||
| 无人机 | 12 | 18.0 | 30.0 | 60.0 |
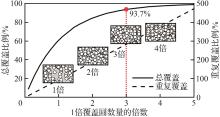
Fig.8
Effect of waypoints on coverage
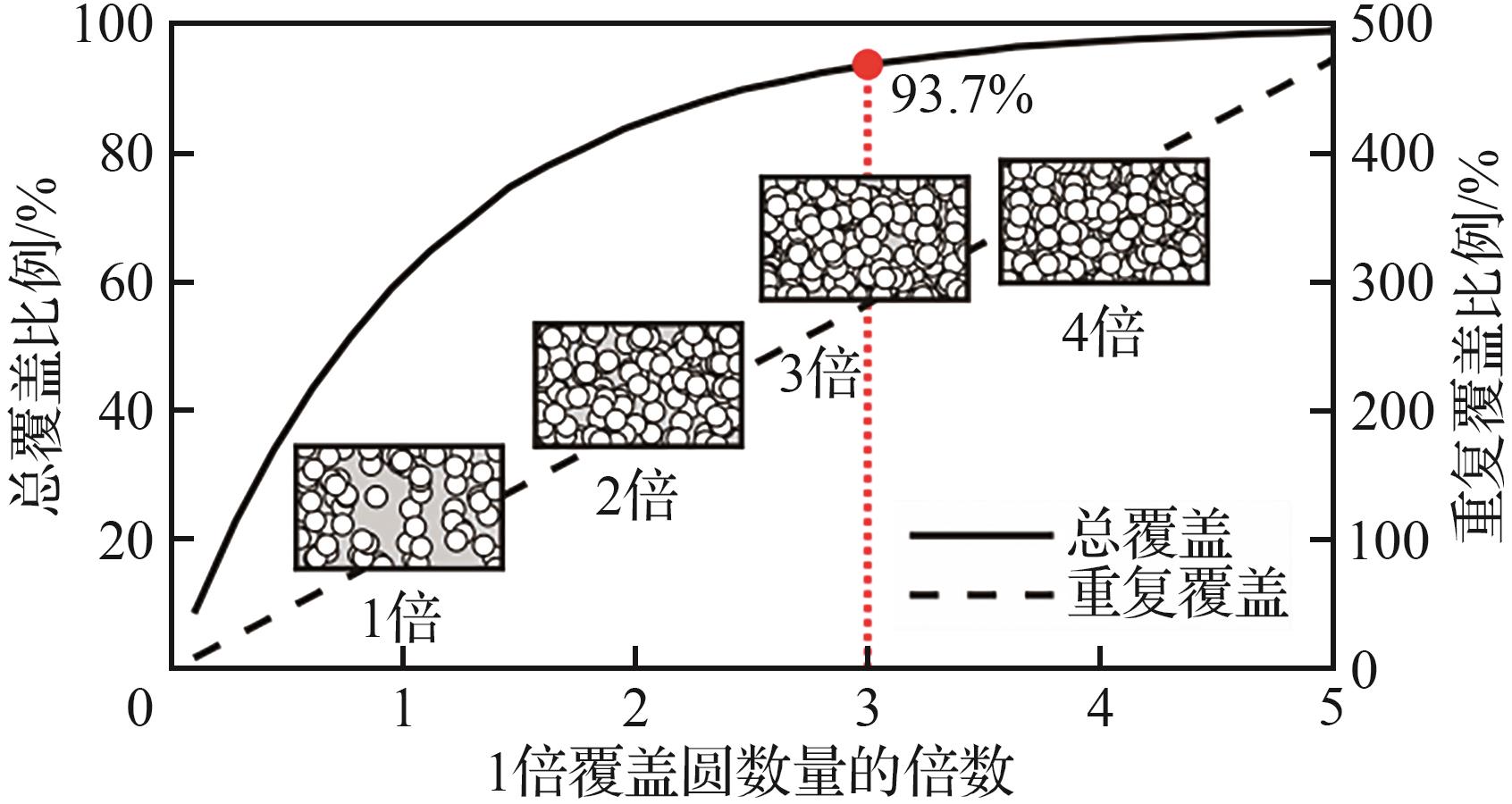
Table 2
Parameters of grid partitioning for heterogeneous platform path planning
| 栅格所属 | 保障舱 | 无人机-细 | 无人机-粗 |
|---|---|---|---|
| 栅格尺度/m | 80 | 80 | 150 |
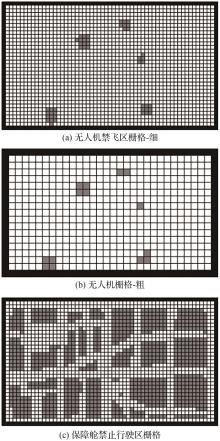
Fig.9
Multi-layer obstacle grid mapping for heterogeneous platforms
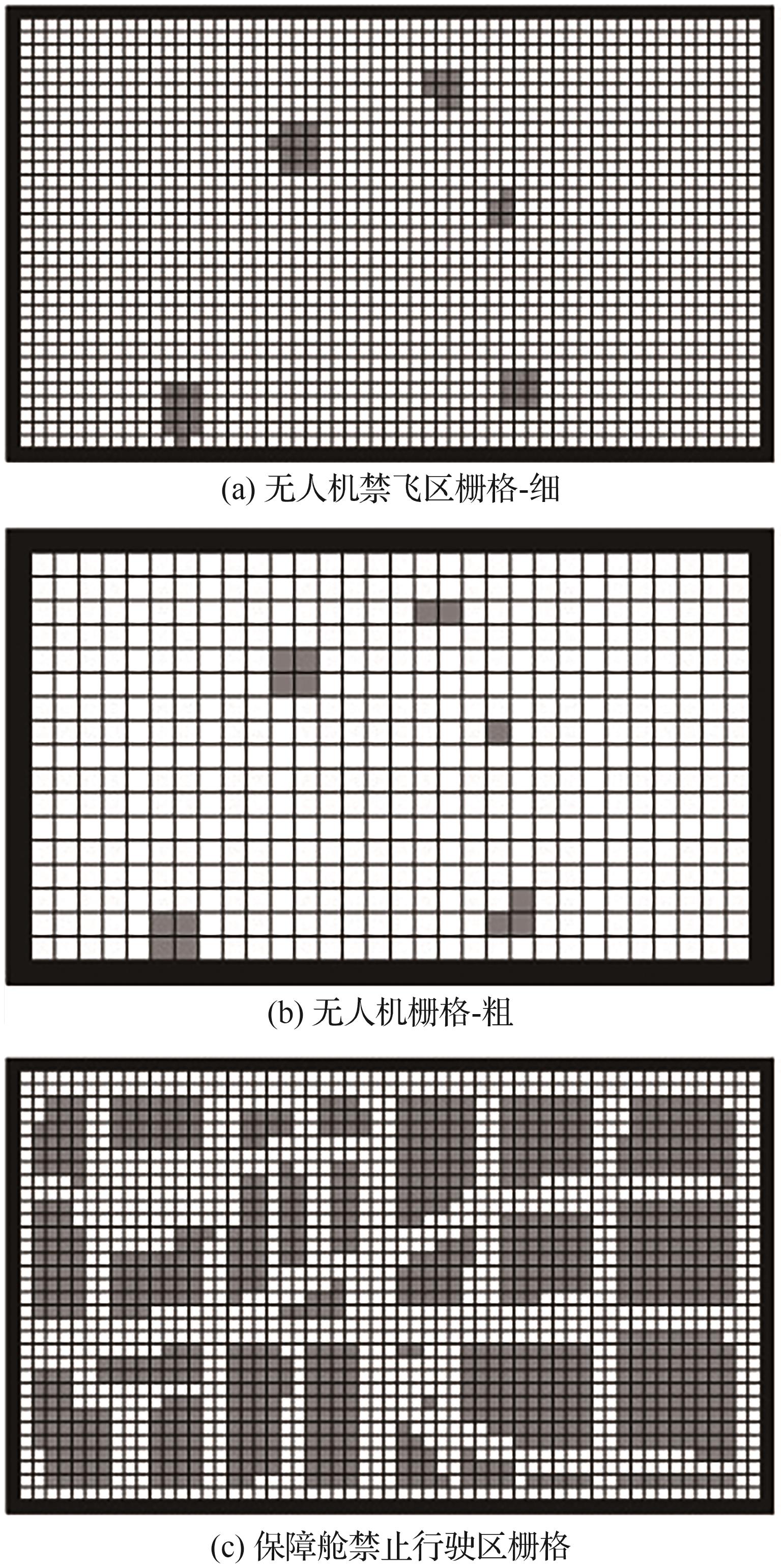
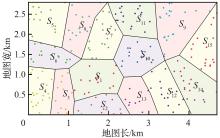
Fig.10
Result of uniform partitioning of subregions
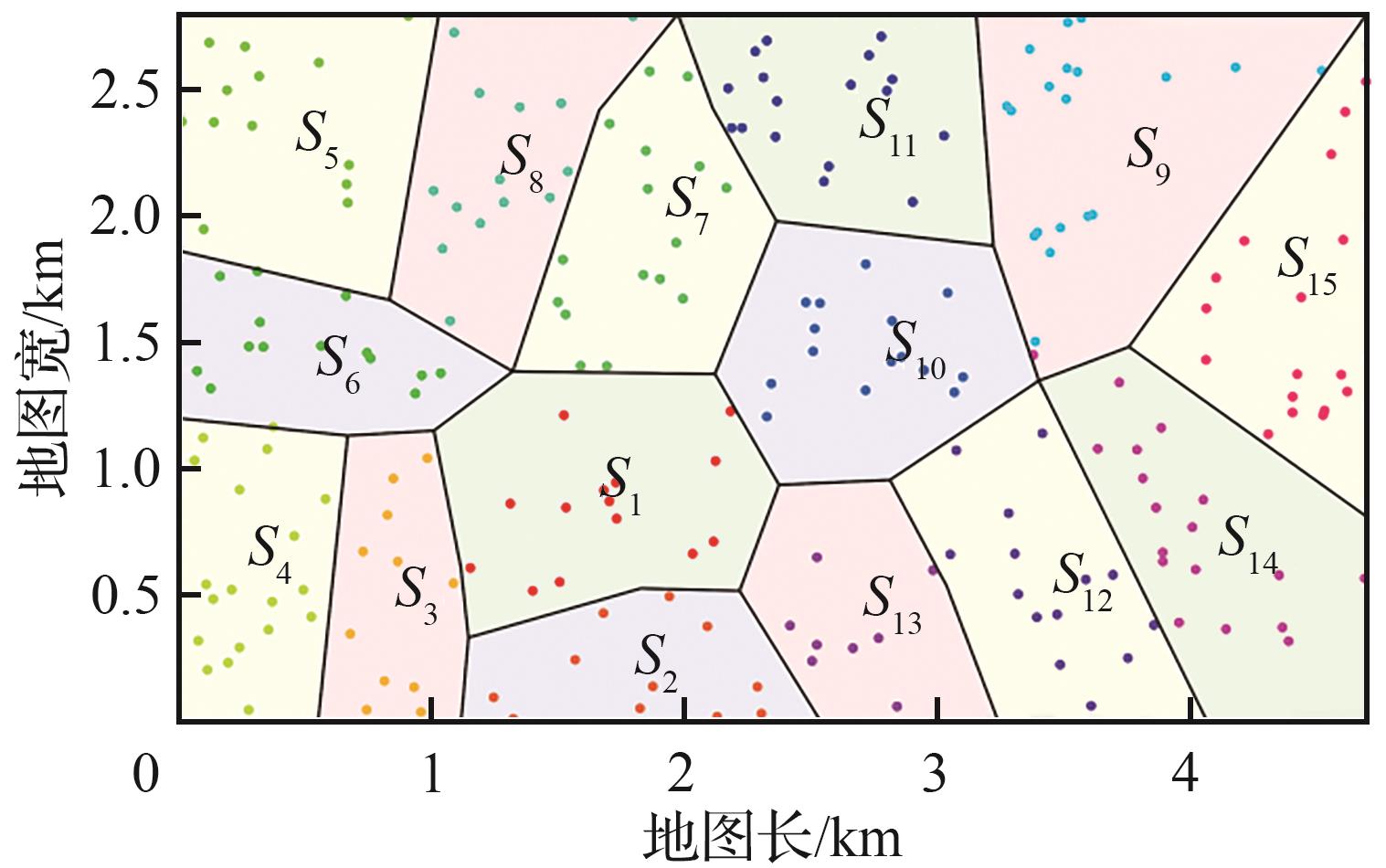
Table 3
Waypoint allocation for subregion partitioning
| 子区域 | 航点编号 | 数量/个 |
|---|---|---|
| S1 | 12-64-69-74-78-79-80-81-82-83-84-8-87-89 | 14 |
| S2 | 65-66-67-68-70-71-72-73-75-76-77 | 11 |
| S3 | 5-6-7-11-14-16-17-21-25-29-30 | 11 |
| S4 | 1-2-3-4-8-9-10-13-15-18-19-20-22-23-26-27-28-32-34 | 19 |
| S5 | 46-50-51-52-53-54-55-57-58-59-60-61-63 | 13 |
| S6 | 24-31-33-35-36-39-40-41-42-44-45-47-48-49 | 14 |
| S7 | 90-92-94-95-97-98-99-100-101-103-106-107-109-111-113-115 | 16 |
| S8 | 37-38-43-56-62-91-93-96-104-105-108-117-118-120 | 14 |
| S9 | 143-144-148-152-157-158-166-168-169-170-172-173-209-210-213-215-217-218-219 | 19 |
| S10 | 86-88-137-138-139-140-145-147-149-150-151-153-154-155-156 | 15 |
| S11 | 102-110-112-114-116-119-142-159-160-161-162-163-164-165-167-171-174 | 17 |
| S12 | 121-124-125-126-127-131-135-136-141-176-179-180-181-184 | 14 |
| S13 | 122-123-128-129-130-132-133-134 | 8 |
| S14 | 146-175-177-178-182-183-185-186-187-188-190-192-194-196-197-198-199-203 | 18 |
| S15 | 189-191-193-195-200-201-202-204-205-206-207-208-211-212-214-216-220 | 17 |
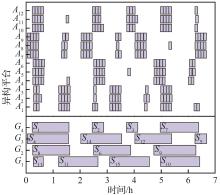
Fig.11
Results of single-round task allocation
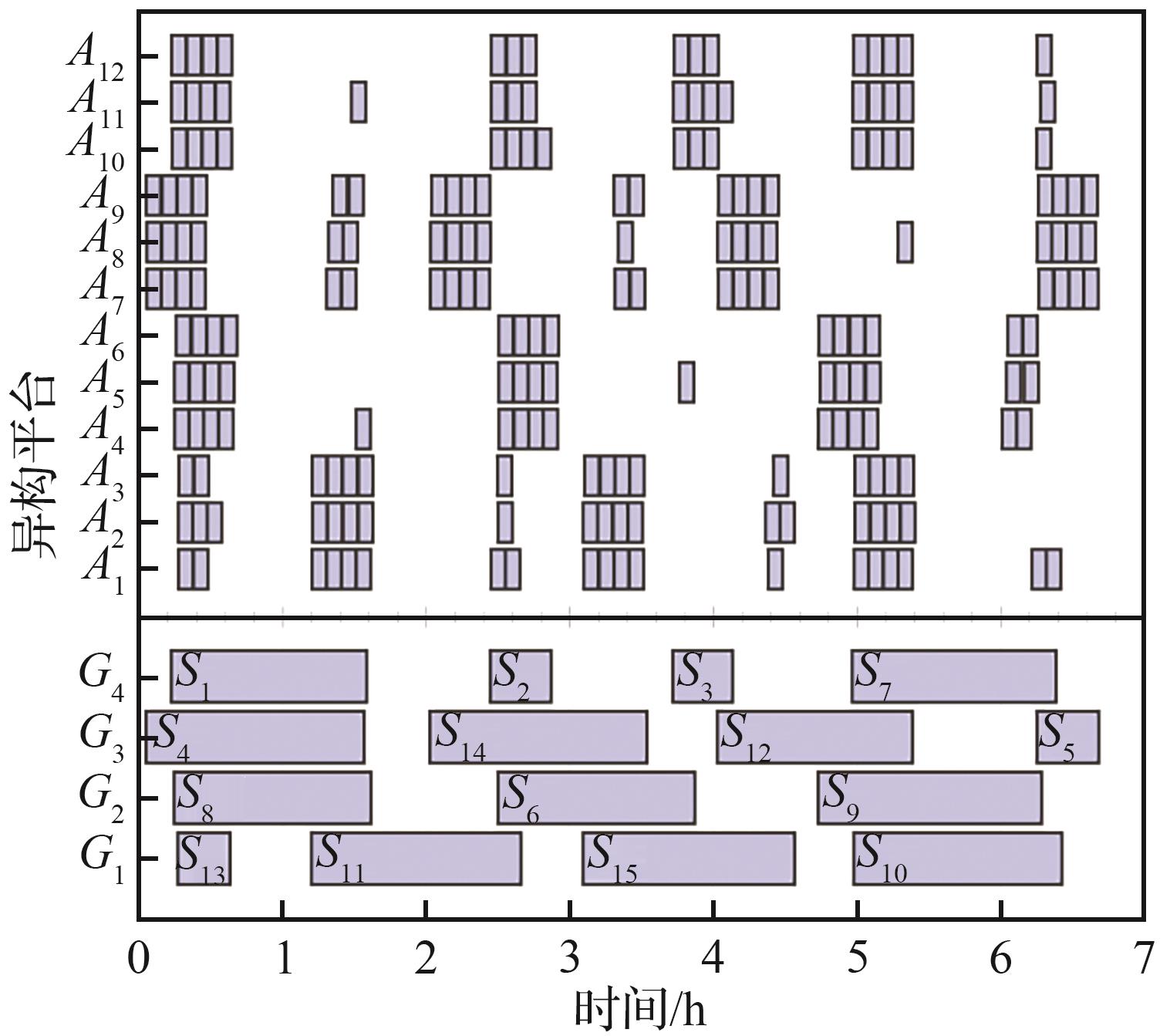
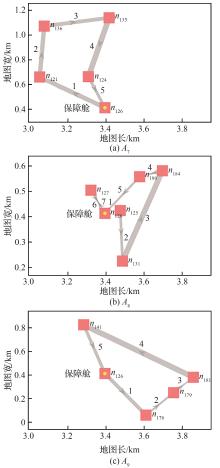
Fig.12
Allocation results within subregions
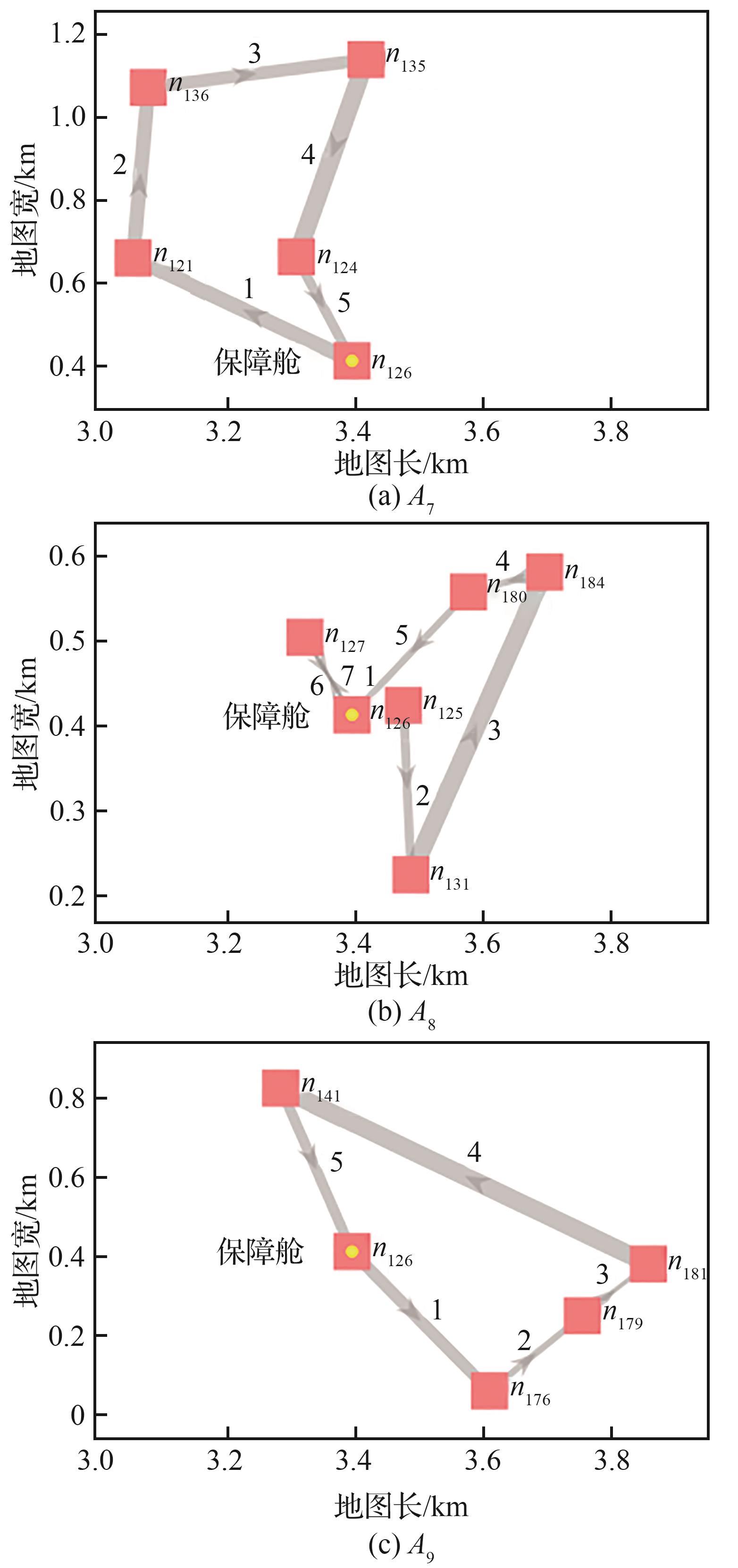
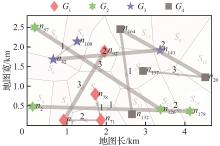
Fig.13
Task allocation sequence for mobile ground-based UGVs among subregions
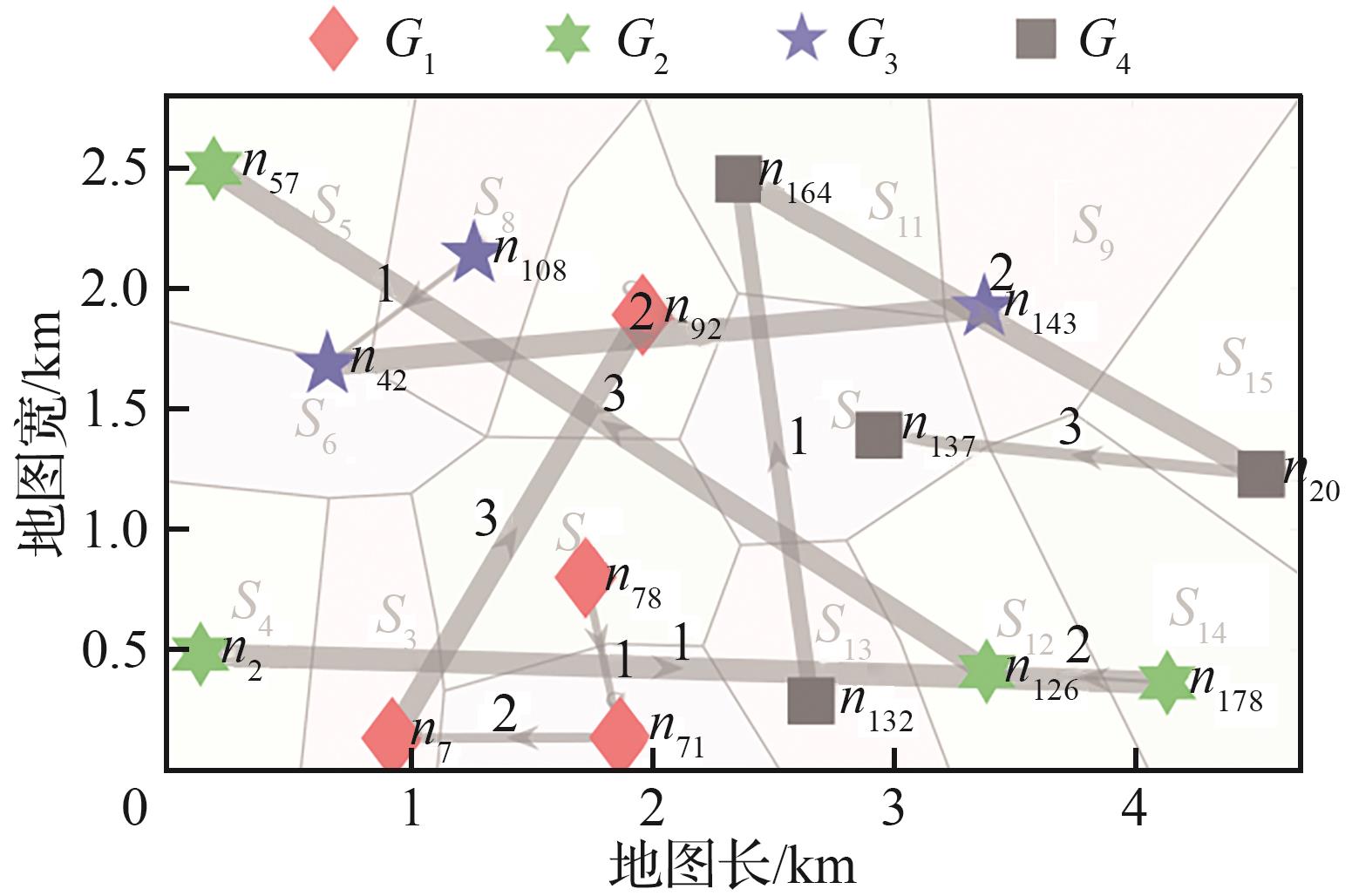

Fig.14
Time consumption for single-round task allocation
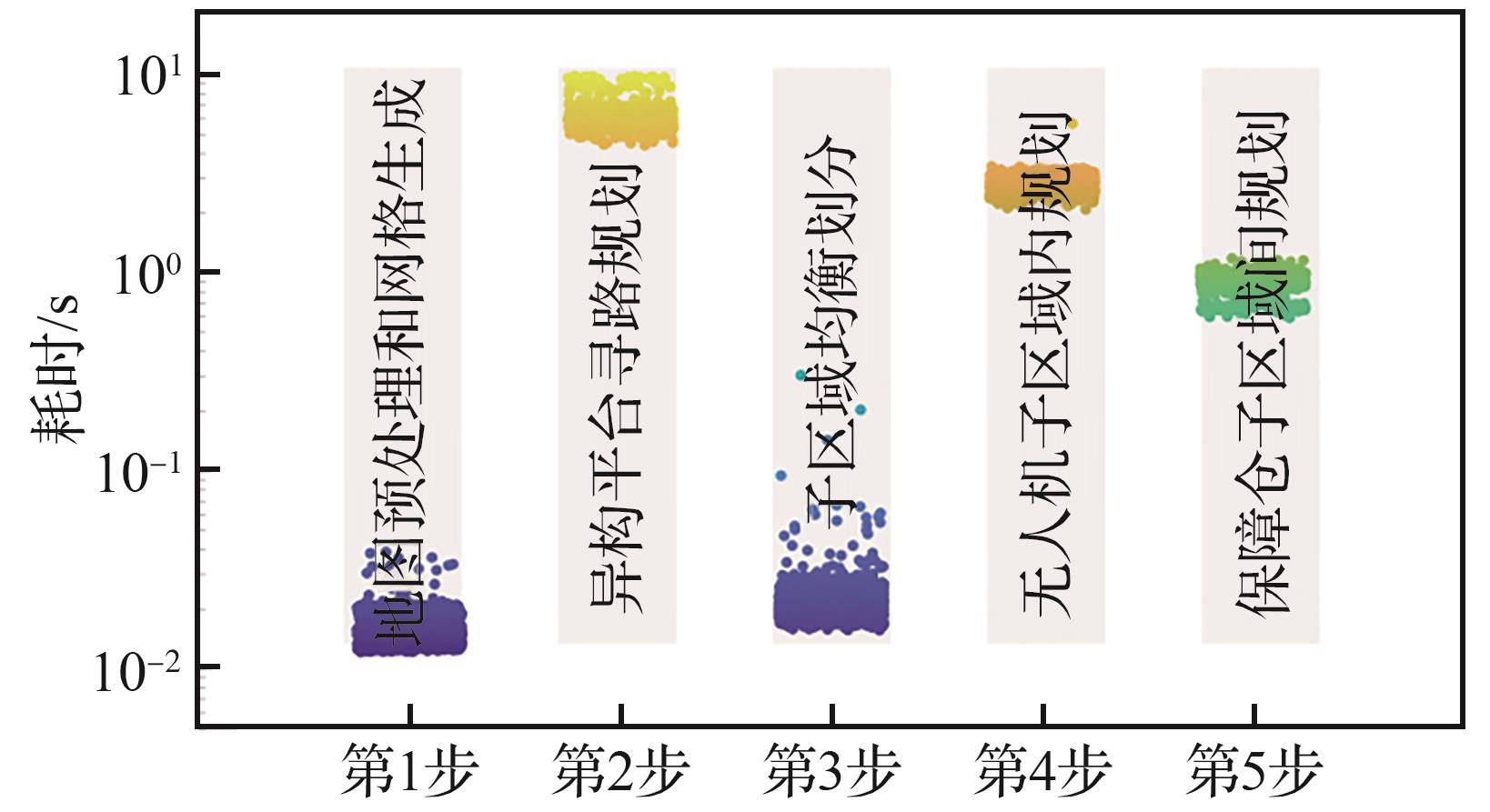
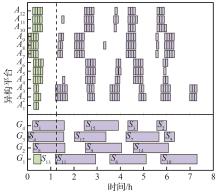
Fig.15
Results of reallocation after A1 offline
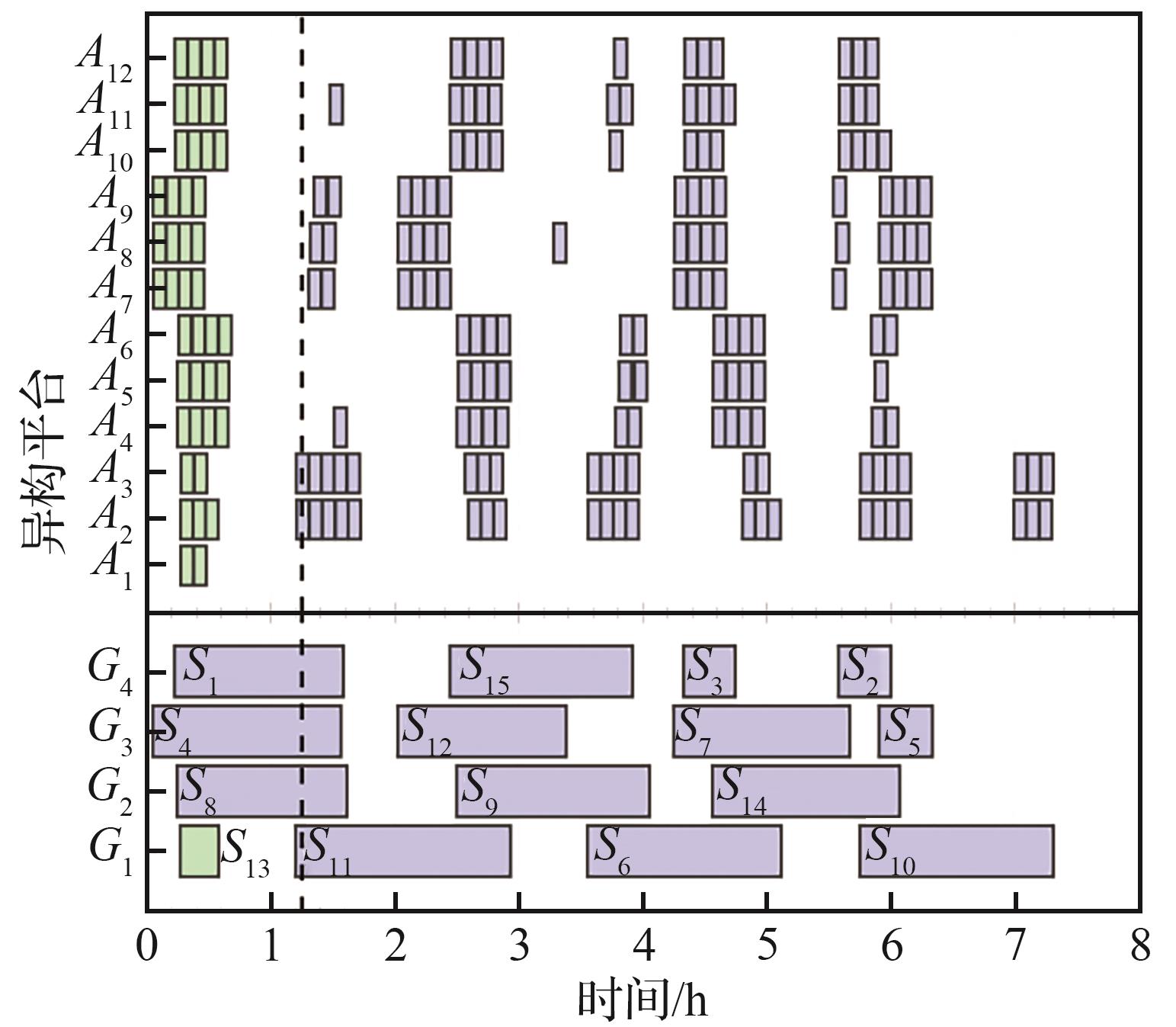
Fig.16
Results of time not reassigned after failure
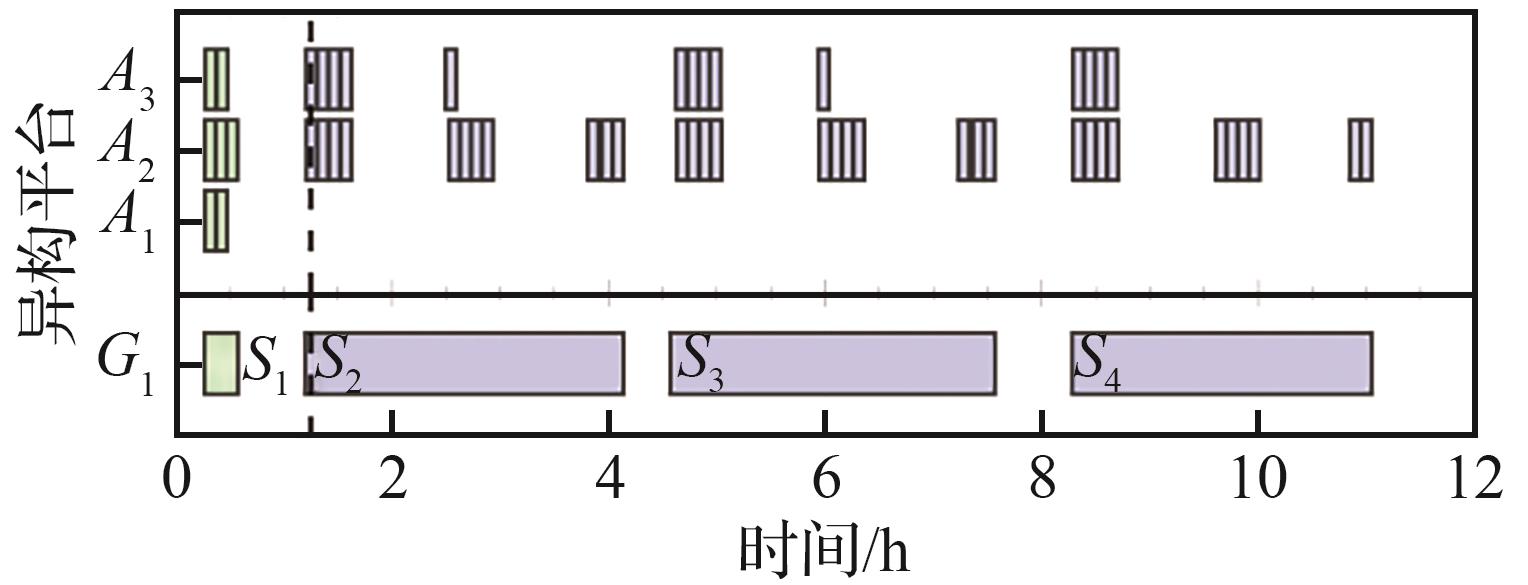
Table 4
Parameters for dynamic information map updates
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 衰减系数 | 0.92 | 探测半径 | 240 |
| 兴趣权重 | 3.2 | 最小权重 | 0.5 |
| 覆盖权重 | 0.8 | 最大权重 | 4 |

Fig.17
Change of weight in multi-round simulation
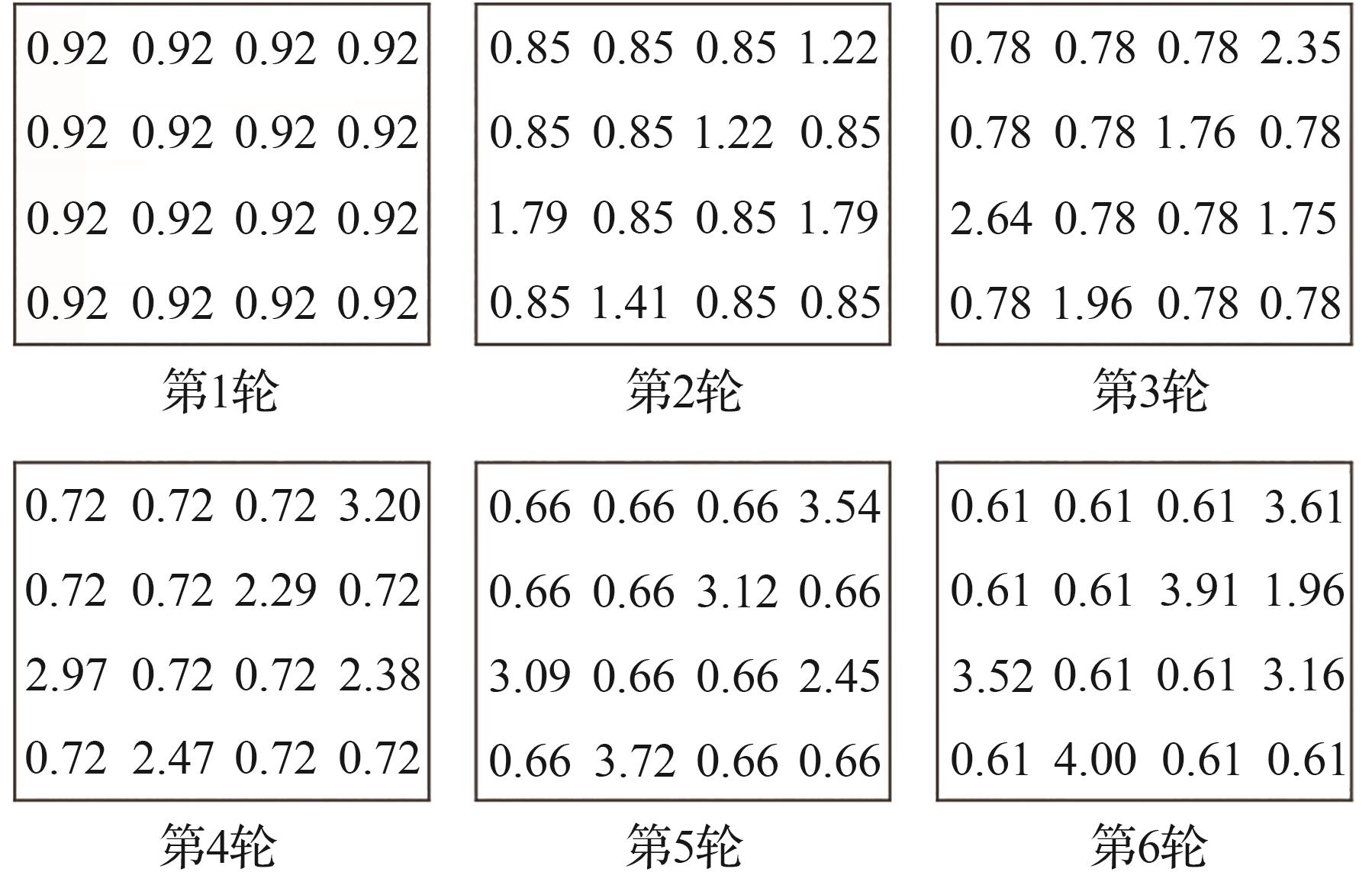
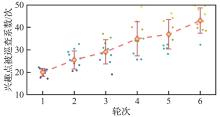
Fig.18
Patterns of multi-round patrol of interest point inspections
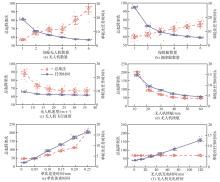
Fig.19
Effect of different heterogeneous platform parameters
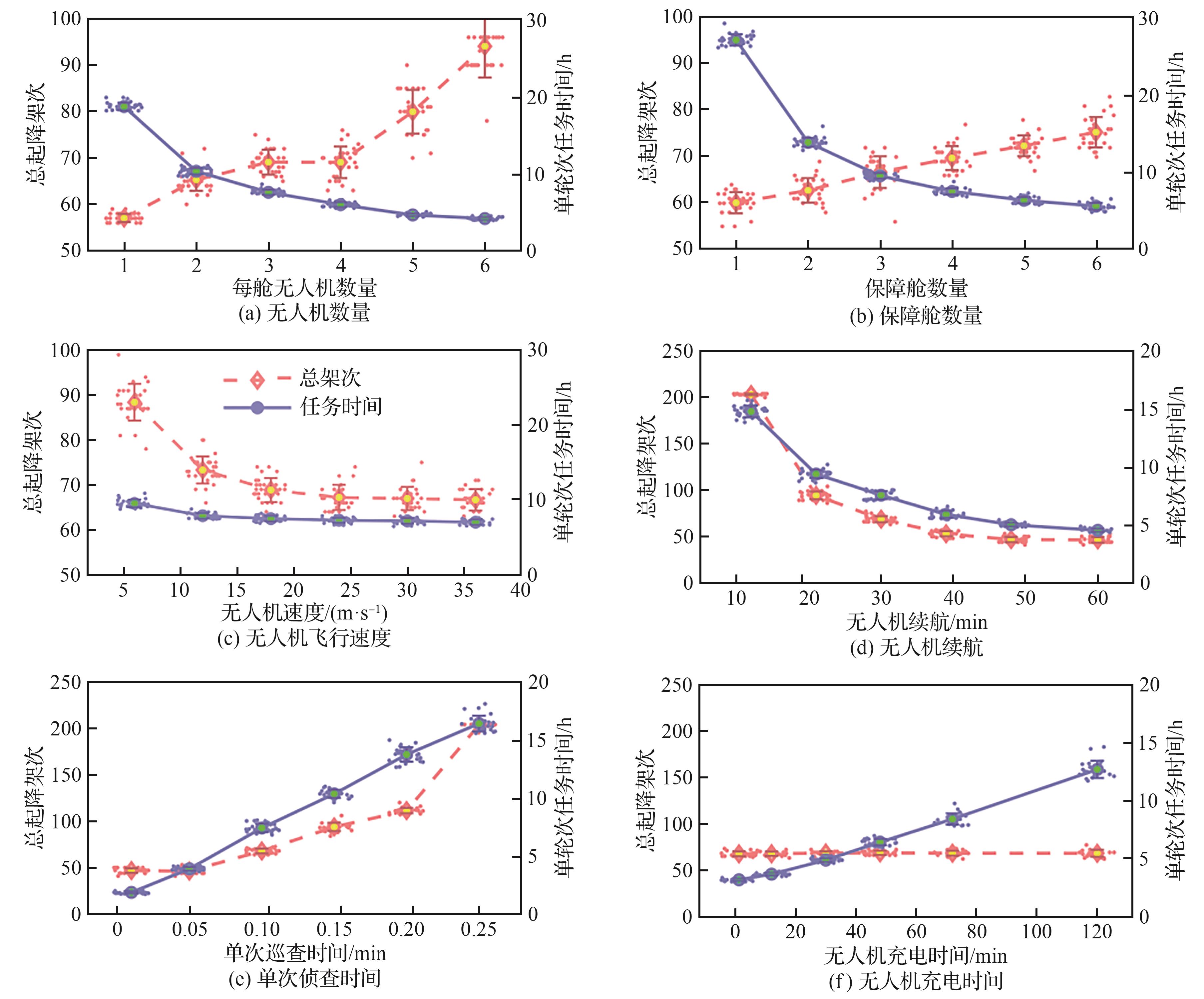

Fig.20
Platform used in the demonstration
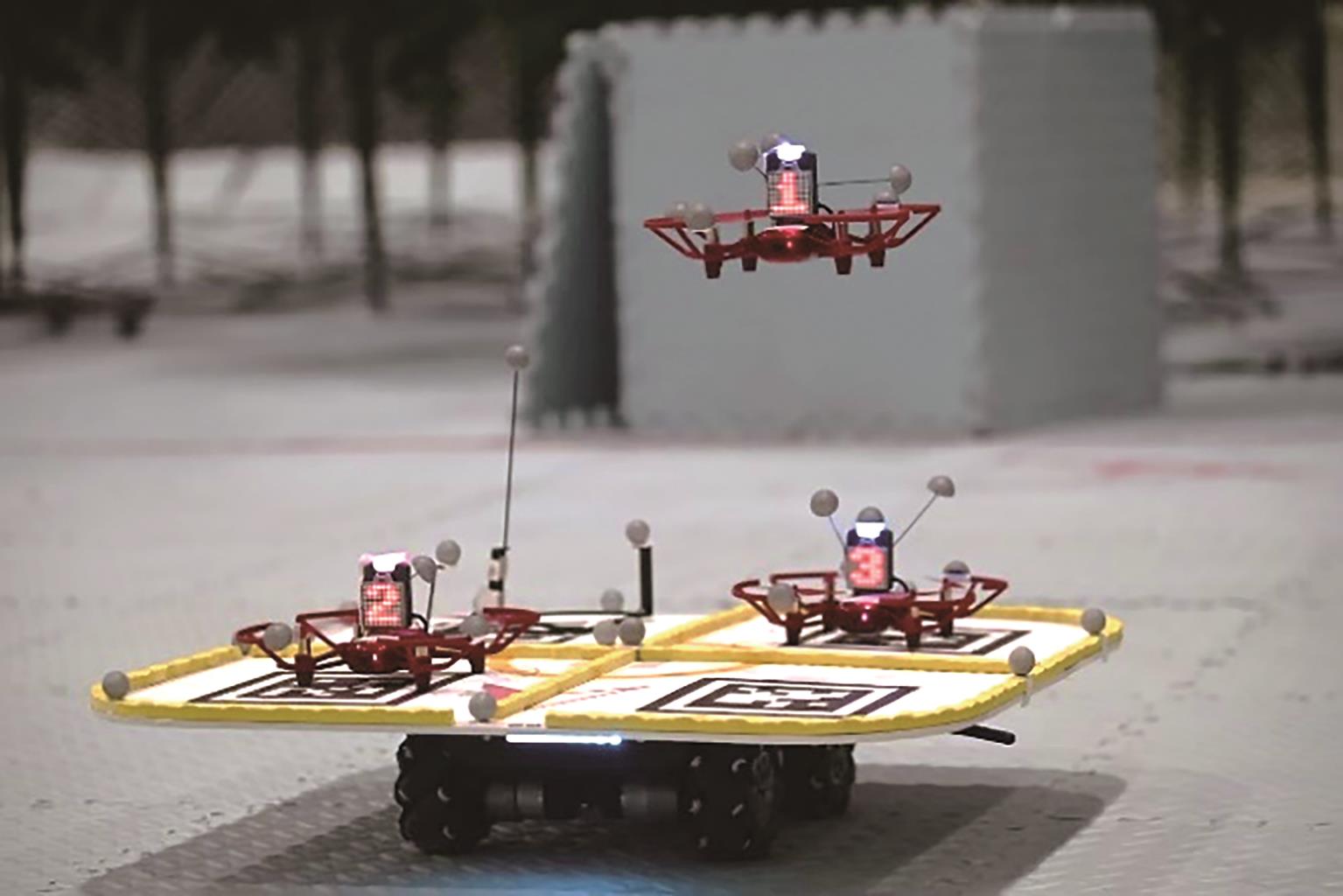
Table 5
Platform parameters for demonstration
| 异构平台 | 数量/个 | 速度/(m·s-1) | 续航/s | 充电时间/s |
|---|---|---|---|---|
| 保障舱 | 3 | 0.5 | ||
| 无人机 | 9 | 1.0 | 35.0 | 20.0 |
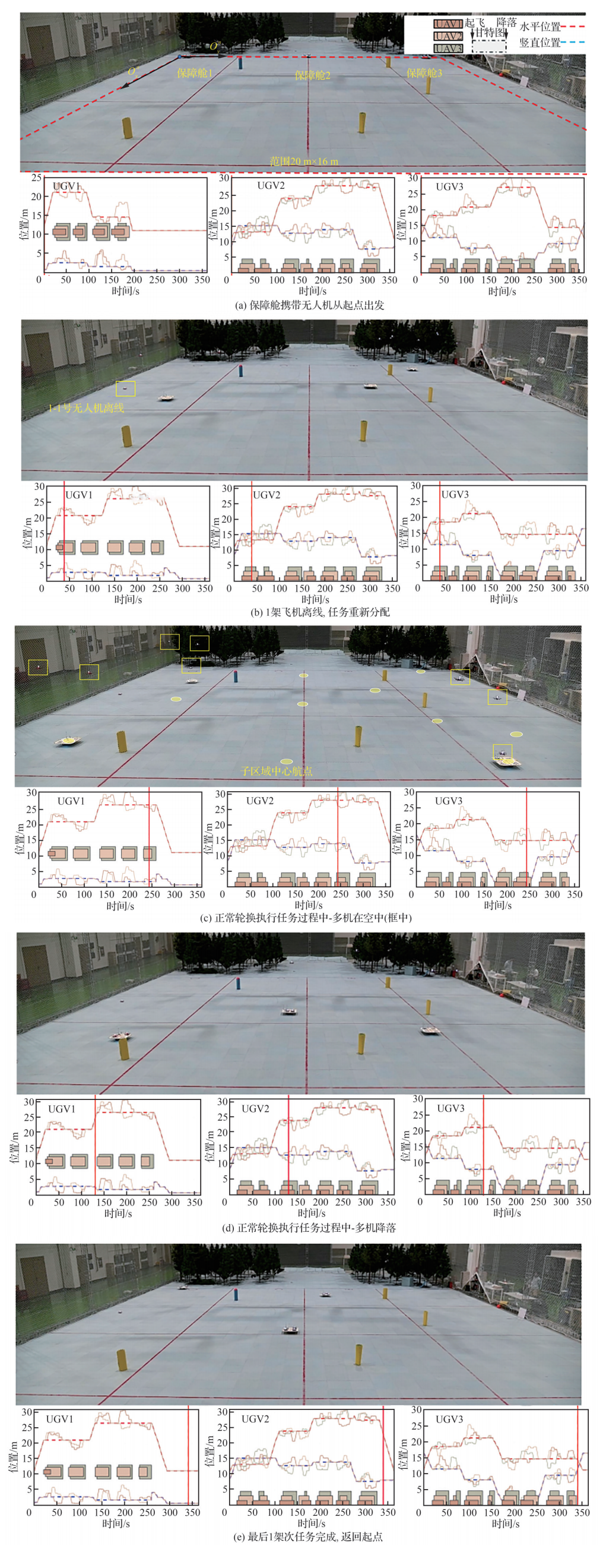
Fig.21
Video snapshot of the time-sequenced demonstration with reallocation
| [1] | LEE H W, LEE C S. Research on logistics of intelligent unmanned aerial vehicle integration system[J]. Journal of Industrial Information Integration, 2023, 36: 100534. |
| [2] | CHEN X, WU Y, XU S T. Mission planning of UAVs and UGV for building inspection in rural area[J]. Algorithms, 2024, 17(5): 177. |
| [3] | CHEN X L, LI G, MEHMOOD M S, et al. Integration and differentiation: Comparison of photography behaviors using unmanned aerial vehicle data in China and Europe[J]. Humanities and Social Sciences Communications, 2023, 10(1): 683. |
| [4] | MAINI P, SUJIT P B. On cooperation between a fuel constrained UAV and a refueling UGV for large scale mapping applications[C]∥ 2015 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2015: 1370-1377. |
| [5] | ZHAO N, LU W D, SHENG M, et al. UAV-assisted emergency networks in disasters[J]. IEEE Wireless Communications, 2019, 26(1): 45-51. |
| [6] | 孙冰, 王川, 杨强, 等. 面向多起点均衡多旅行商问题的进化算法[J]. 计算机工程与设计, 2023, 44(7): 2030-2038. |
| SUN B, WANG C, YANG Q, et al. Improved evolutionary algorithm for balanced multiple traveling salesmen problem with multiple starting points[J]. Computer Engineering and Design, 2023, 44(7): 2030-2038 (in Chinese). | |
| [7] | 毕文豪, 张梦琦, 高飞, 等. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| BI W H, ZHANG M Q, GAO F, et al. Review on UAV swarm task allocation technology[J]. Systems Engineering and Electronics, 2024, 46(3): 922-934 (in Chinese). | |
| [8] | 张曼, 王桢. 基于任务拆分的多无人机任务分配多目标优化[J]. 火力与指挥控制, 2024, 49(2): 69-74. |
| ZHANG M, WANG Z. Multi-objective optimization of multi-UAV task assignment based on task splitting[J]. Fire Control & Command Control, 2024, 49(2): 69-74 (in Chinese). | |
| [9] | 张安, 杨咪, 毕文豪, 等. 基于多策略GWO算法的不确定环境下异构多无人机任务分配[J]. 航空学报, 2023, 44(8): 327115. |
| ZHANG A, YANG M, BI W H, et al. Task allocation of heterogeneous multi-UAVs in uncertain environment based on multi-strategy integrated GWO[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(8): 327115 (in Chinese). | |
| [10] | YU K, BUDHIRAJA A K, BUEBEL S, et al. Algorithms and experiments on routing of unmanned aerial vehicles with mobile recharging stations[J]. Journal of Field Robotics, 2019, 36(3): 602-616. |
| [11] | DODGE M, MIRHASSANI S ALI, HOOSHMAND F. A modelling and solution approach for wind-affected drone-truck routing problem under uncertainty[J]. Expert Systems with Applications, 2024, 257: 124996. |
| [12] | 张尚义, 李文光, 葛佳昊. 复杂场景下考虑能源特性的多太阳能无人机任务分配方法[J]. 战术导弹技术, 2024(5): 99-110. |
| ZHANG S Y, LI W G, GE J H. Multi solar-powered UAV task assignment method considering energy characteristics in complex scenarios[J]. Tactical Missile Technology, 2024(5): 99-110 (in Chinese). | |
| [13] | 陈志旺, 夏顺, 李建雄, 等. 考虑分配次序的无人机协同目标分配建模与遗传算法求解[J]. 控制理论与应用, 2019, 36(7): 1072-1082. |
| CHEN Z W, XIA S, LI J X, et al. Modeling of unmanned aerial vehicles cooperative target assignment with allocation order and its solving of genetic algorithm[J]. Control Theory & Applications, 2019, 36(7): 1072-1082 (in Chinese). | |
| [14] | 王然然, 魏文领, 杨铭超, 等. 考虑协同航路规划的多无人机任务分配[J]. 航空学报, 2020, 41(Sup.2): 724234. |
| WANG R R, WEI W L, YANG M C, et al. Task allocation of multiple UAVs considering cooperative route planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(Sup.2): 724234 (in Chinese). | |
| [15] | ZHAO M, LI D C. Collaborative task allocation of heterogeneous multi-unmanned platform based on a hybrid improved contract net algorithm[J]. IEEE Access, 2021, 9: 78936-78946. |
| [16] | MA Z Y, XIONG J, GONG H J, et al. Adaptive depth graph neural network-based dynamic task allocation for UAV-UGVs under complex environments[J]. IEEE Transactions on Intelligent Vehicles, 2024, 14(8): 1-14. |
| [17] | 程亚南, 王晓峰, 刘凇佐, 等. 求解多起点多旅行商问题的K-means聚类信息传播算法[J]. 科学技术与工程, 2022, 22(23): 10146-10154. |
| CHENG Y N, WANG X F, LIU S Z, et al. K-means clustering information propagation algorithm for multiple depots multiple traveling salesman problem[J]. Science Technology and Engineering, 2022, 22(23): 10146-10154 (in Chinese). | |
| [18] | NI J J, TANG M, CHEN Y N, et al. An improved cooperative control method for hybrid unmanned aerial-ground system in multitasks[J]. International Journal of Aerospace Engineering, 2020, 2020: 9429108. |
| [19] | XIA Y S, CHEN C, LIU Y, et al. Two-layer path planning for multi-area coverage by a cooperative ground vehicle and drone system[J]. Expert Systems with Applications, 2023, 217: 119604. |
| [20] | ROPERO F, MUÑOZ P, R-MORENO M D. TERRA: A path planning algorithm for cooperative UGV-UAV exploration[J]. Engineering Applications of Artificial Intelligence, 2019, 78: 260-272. |
| [21] | 赵晓林, 魏兆恬, 赵博欣, 等. 异构资源类型下多无人机任务分配[J]. 国防科技大学学报, 2023, 45(4): 232-242. |
| ZHAO X L, WEI Z T, ZHAO B X, et al. Task allocation of multiple UAVs under heterogeneous resource types[J]. Journal of National University of Defense Technology, 2023, 45(4): 232-242 (in Chinese). | |
| [22] | 张瑞鹏, 冯彦翔, 杨宜康. 多无人机协同任务分配混合粒子群算法[J]. 航空学报, 2022, 43(12): 326011. |
| ZHANG R P, FENG Y X, YANG Y K. Hybrid particle swarm algorithm for multi-UAV cooperative task allocation[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(12): 326011 (in Chinese). | |
| [23] | 王峰, 付青坡, 韩孟臣, 等. LeCMPSO算法求解异构无人机协同多任务重分配问题[J]. 控制理论与应用, 2024, 41(6): 1009-1017. |
| WANG F, FU Q P, HAN M C, et al. Learning-guided coevolution multi-objective particle swarm optimization for heterogeneous UAV cooperative multi-task reallocation problem[J]. Control Theory & Applications, 2024, 41(6): 1009-1017 (in Chinese). | |
| [24] | 马秀娟, 武帅, 蔡春伟, 等. 应用于无人机的无线充电技术研究[J]. 电机与控制学报, 2019, 23(8): 1-9. |
| MA X J, WU S, CAI C W, et al. Research on wireless charging technology applied to UAVs[J]. Electric Machines and Control, 2019, 23(8): 1-9 (in Chinese). |
| [1] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [2] | Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879-530879. |
| [3] | Yumei HU, Quan PAN, Bao DENG. A Fisher information based adaptive filtering algorithm for sensor trajectory planning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 629825-629825. |
| [4] | Zhe LIU, Xige ZHANG, Changzhu WEI, Naigang CUI. High-precision adaptive convex programming for reentry trajectories of suborbital vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729430-729430. |
| [5] | Xuejian WANG, Yongming WEN, Xiaorong SHI, Ningning ZHANG, Jiexi LIU. Design of hybrid intelligent decision framework for multi⁃agent and multi⁃coupling tasks [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729770-729770. |
| [6] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [7] | An ZHANG, Mi YANG, Wenhao BI, Baichuan ZHANG, Yunong WANG. Task allocation of heterogeneous multi-UAVs in uncertain environment based on multi-strategy integrated GWO [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327115-327115. |
| [8] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [9] | Gang LEI, Wei LUO, Yunshu LI, Canhui LAI. Optimization of reentry maneuver trajectory for hypersonic glide vehicles in multiple no-fly zones [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528769-528769. |
| [10] | Lei DONG, Hongbing CHEN, Xi CHEN, Changxiao ZHAO. Distributed multi-agent coalition task allocation strategy for single pilot operation mode based on DQN [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(13): 327895-327895. |
| [11] | Qilei GUO, Weimin SANG, Junjie NIU, Ye YUAN. UAV flight strategy considering icing risk under complex meteorological conditions [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 627518-627518. |
| [12] | RAN Qingbo, XIAO Hong, YANG Fuhong, DUAN Yugang. Trajectory planning algorithm for automatic wire laying on perforated surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 425602-425602. |
| [13] | SUN Yang, CHANG Min, BAI Junqiang. Trajectory planning and control for micro-quadrotor perching on vertical surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325756-325756. |
| [14] | XIE Hua, LI Zihong, YANG Lei, ZHU Yongwen, LIU Fangzi. Optimization of four-dimensional trajectory of city pair with limited capacity [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 325581-325581. |
| [15] | XU Guangtong, WANG Zhu, CAO Yan, SUN Jingliang, LONG Teng. Dynamic-priority-decoupled UAV swarm trajectory planning using distributed sequential convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 325059-325059. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341