ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (5): 326539.doi: 10.7827/S1000-6893.2021.26539
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Yong XU1, Hongtao YAN1( ), Tao JIA1, Yue MA1, Zehua DENG1, Duoneng LIU2
), Tao JIA1, Yue MA1, Zehua DENG1, Duoneng LIU2
Received:2021-10-19
Revised:2021-11-05
Accepted:2022-01-02
Online:2023-03-15
Published:2023-02-01
Contact:
Hongtao YAN
E-mail:yanhongtao@cardc.cn
Supported by:CLC Number:
Yong XU, Hongtao YAN, Tao JIA, Yue MA, Zehua DENG, Duoneng LIU. Aerial simulation docking technology of fixed-wing clustering UAVs[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 326539.

Fig. 1
Pipeline of aerial simulation docking process for clustering UAVs
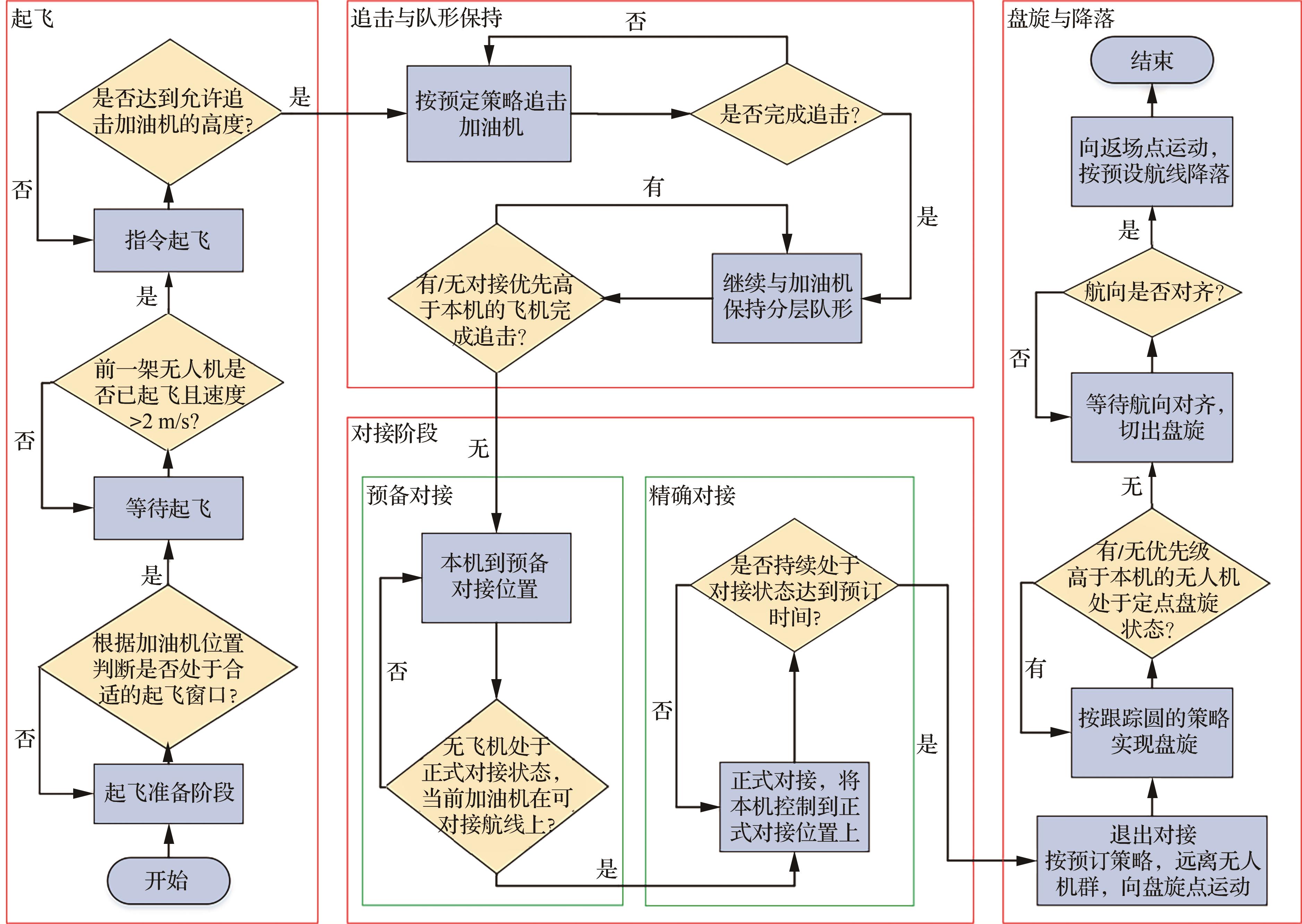

Fig. 2
Strategy for UAV to chase tanker aircraft
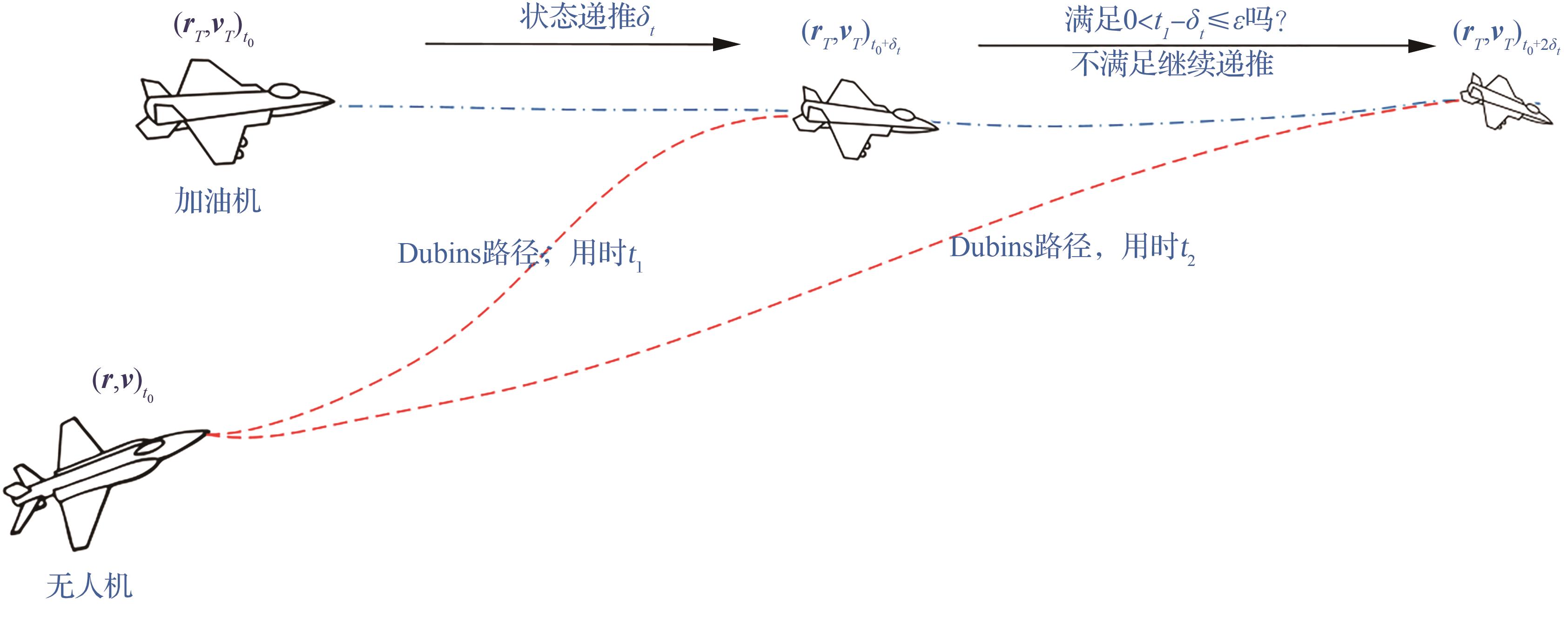

Fig. 3
Solving Dubins path by geometric method


Fig. 4
UAV tracking straight line
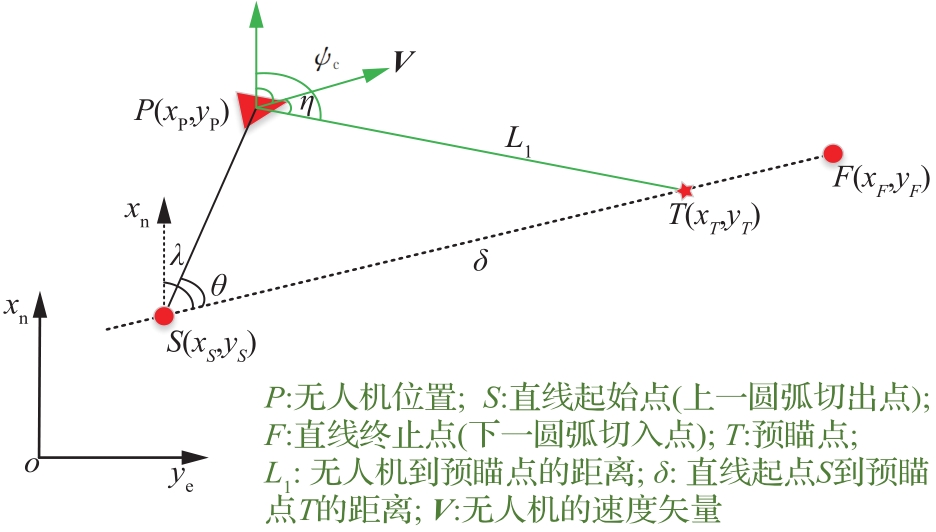

Fig. 5
UAV tracking circle
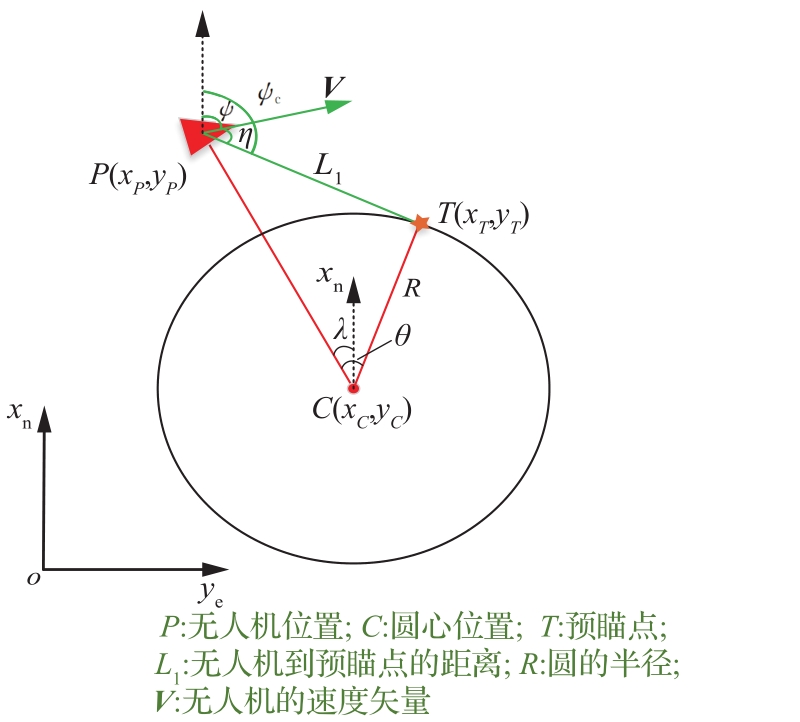
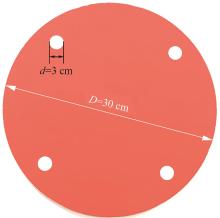
Fig. 6
Simulation drogue structure
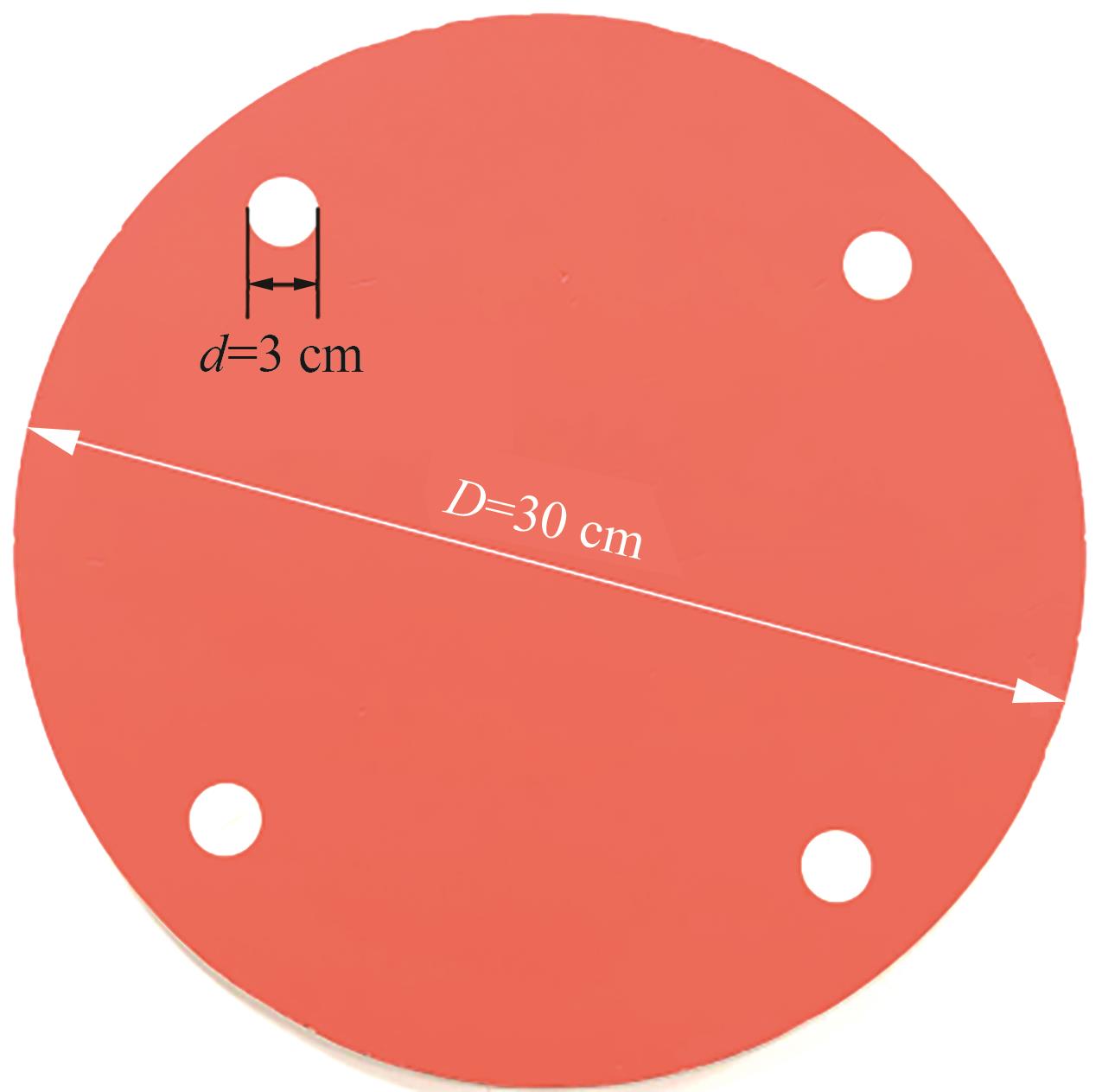

Fig. 7
Process of simulation drogue detection based on prior information

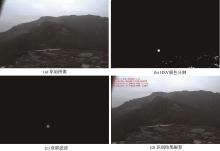
Fig. 8
Results of simulation drogue detection
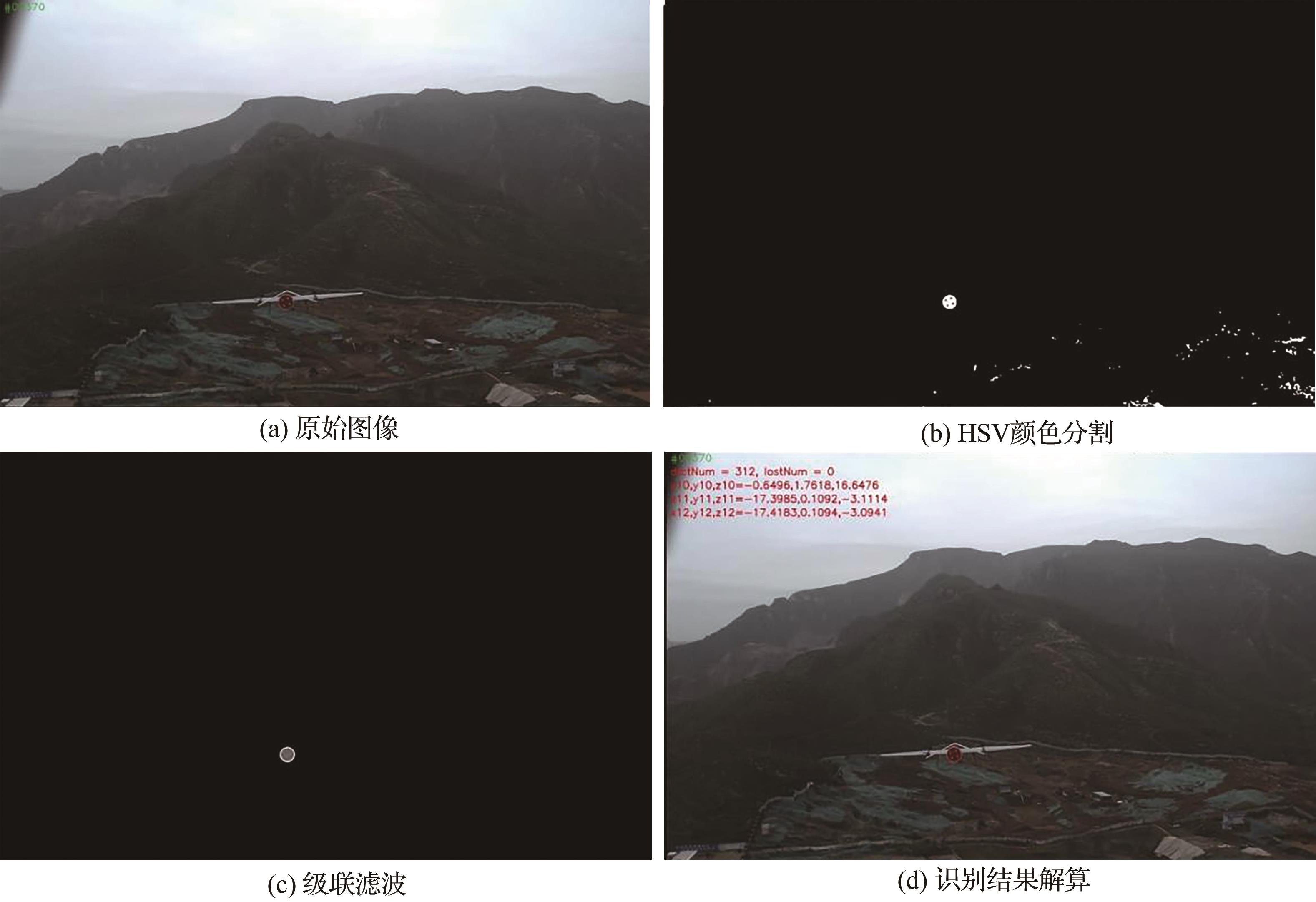

Fig. 9
Docking process coordinate systems
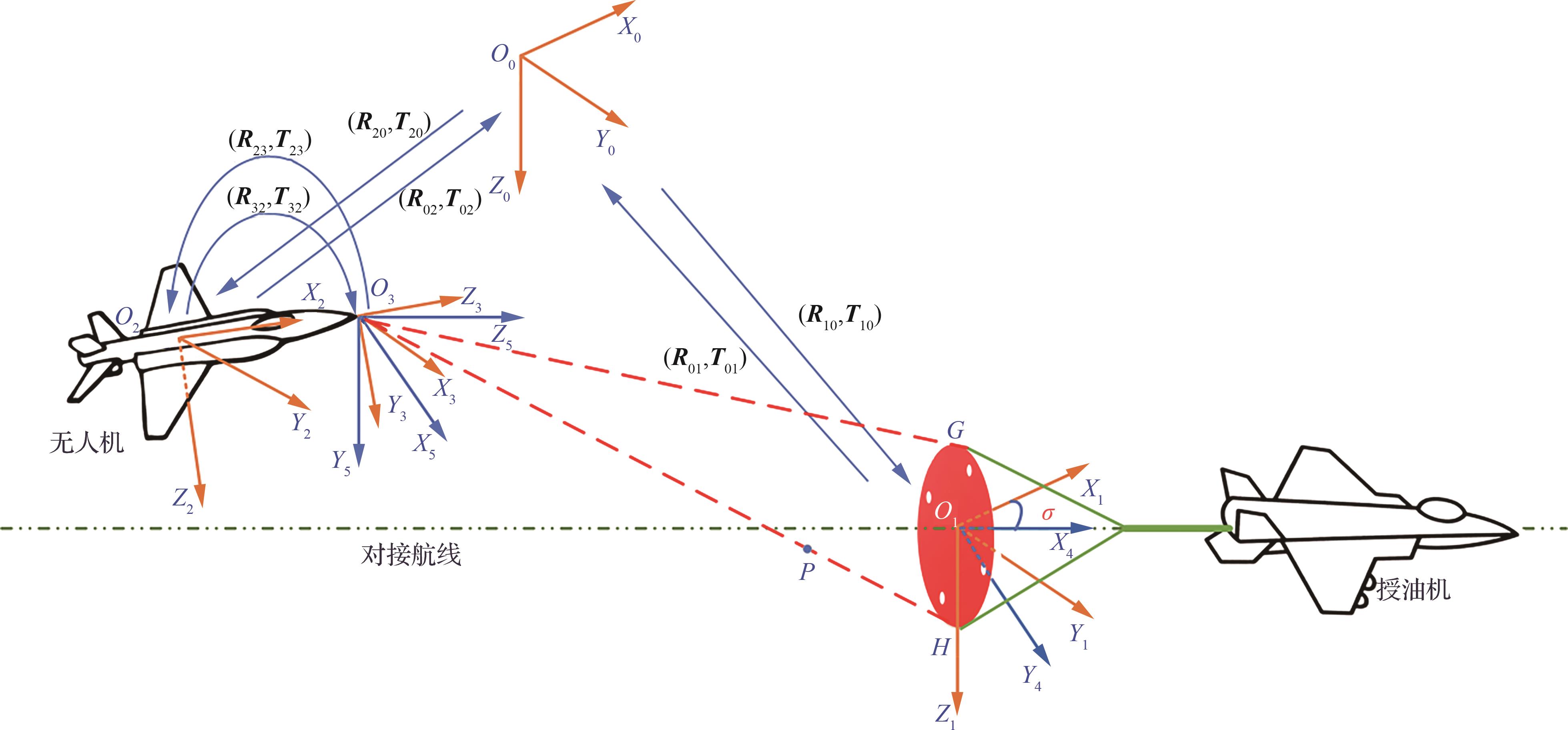
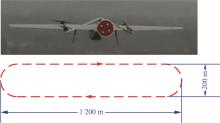
Fig. 10
Tanker aircraft and docking route
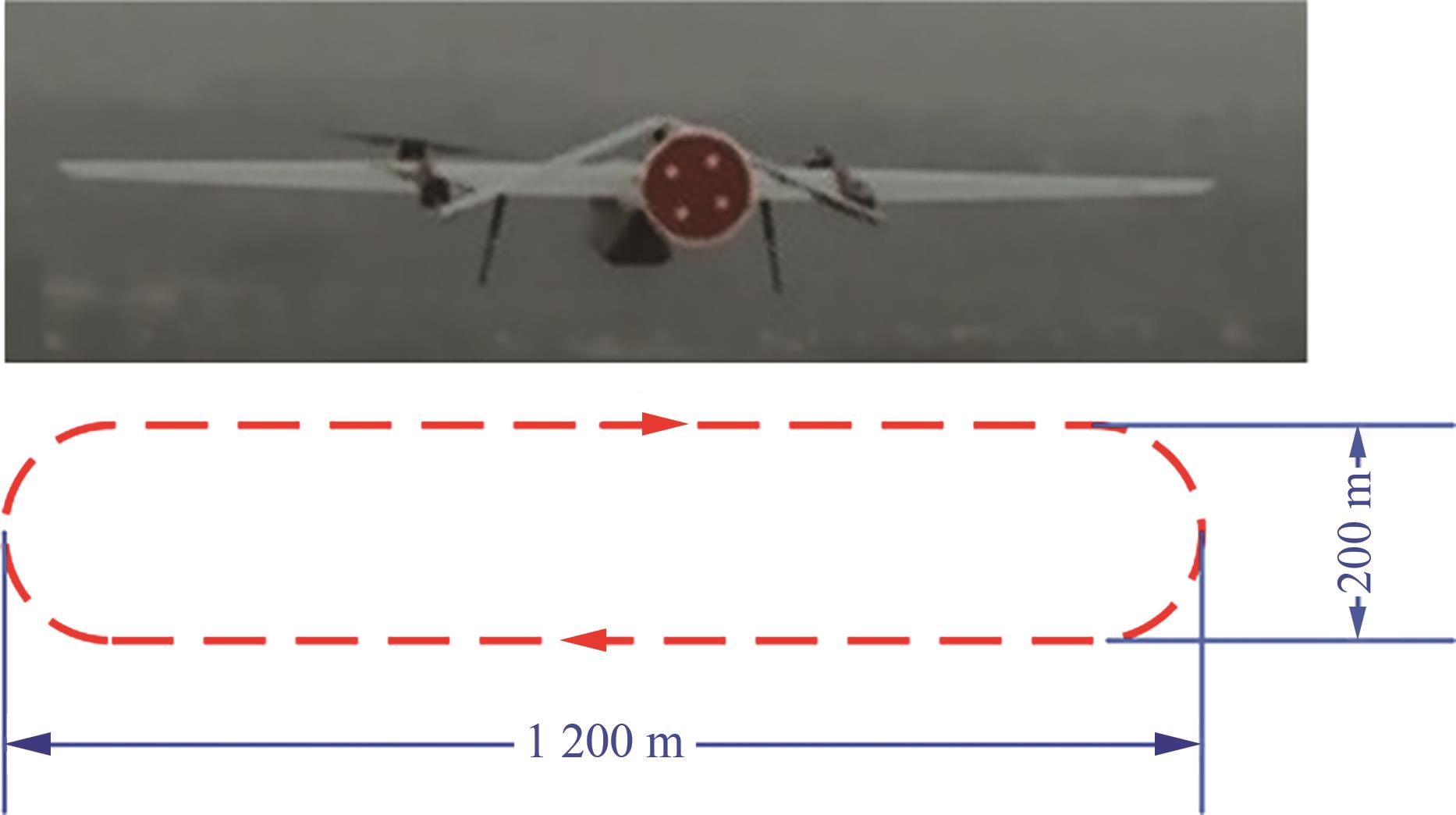

Fig. 11
Fixed-wing clustering UAVs system


Fig. 12
Flight path of UAV formation tracking tanker
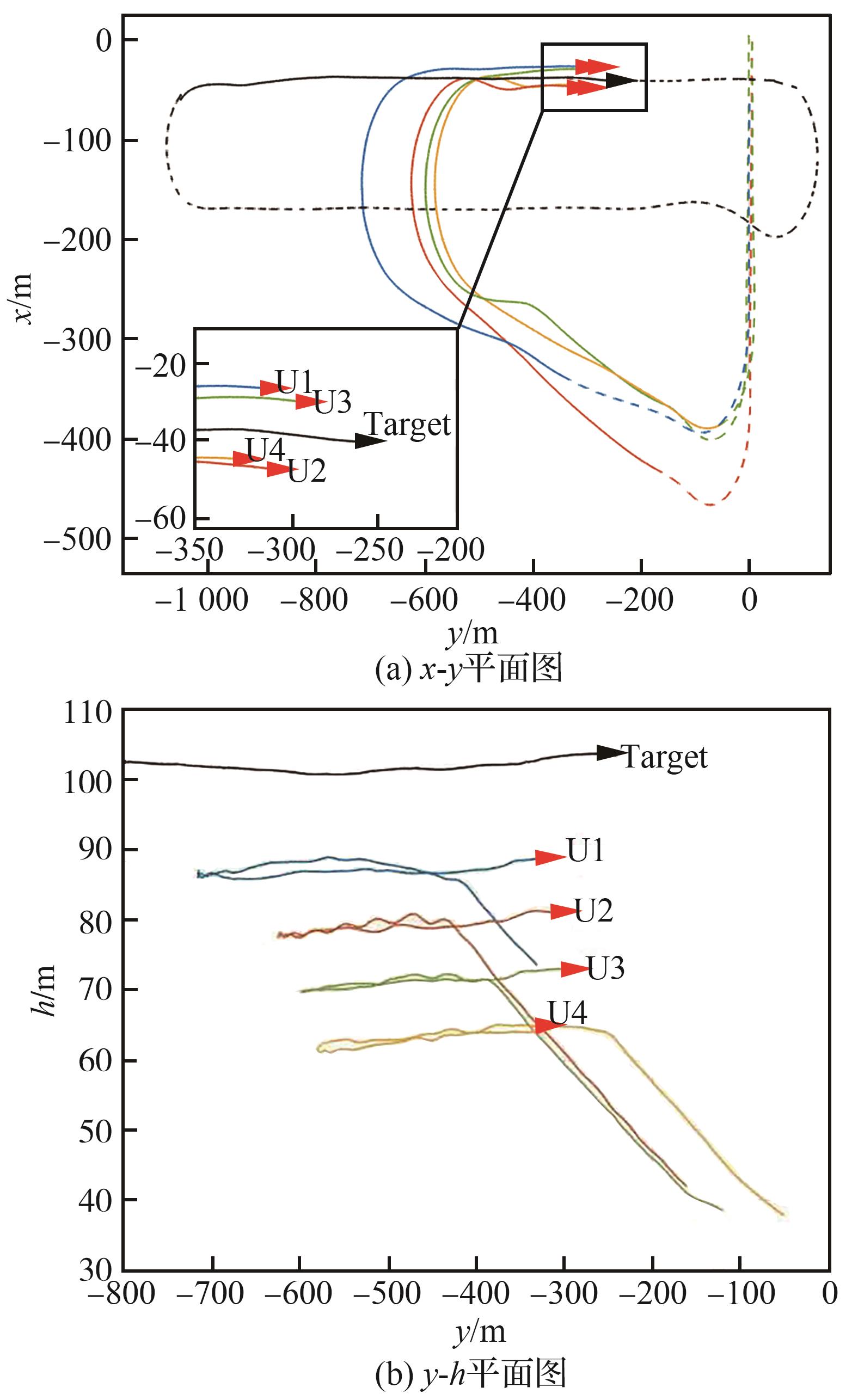

Fig. 13
U2 docking process
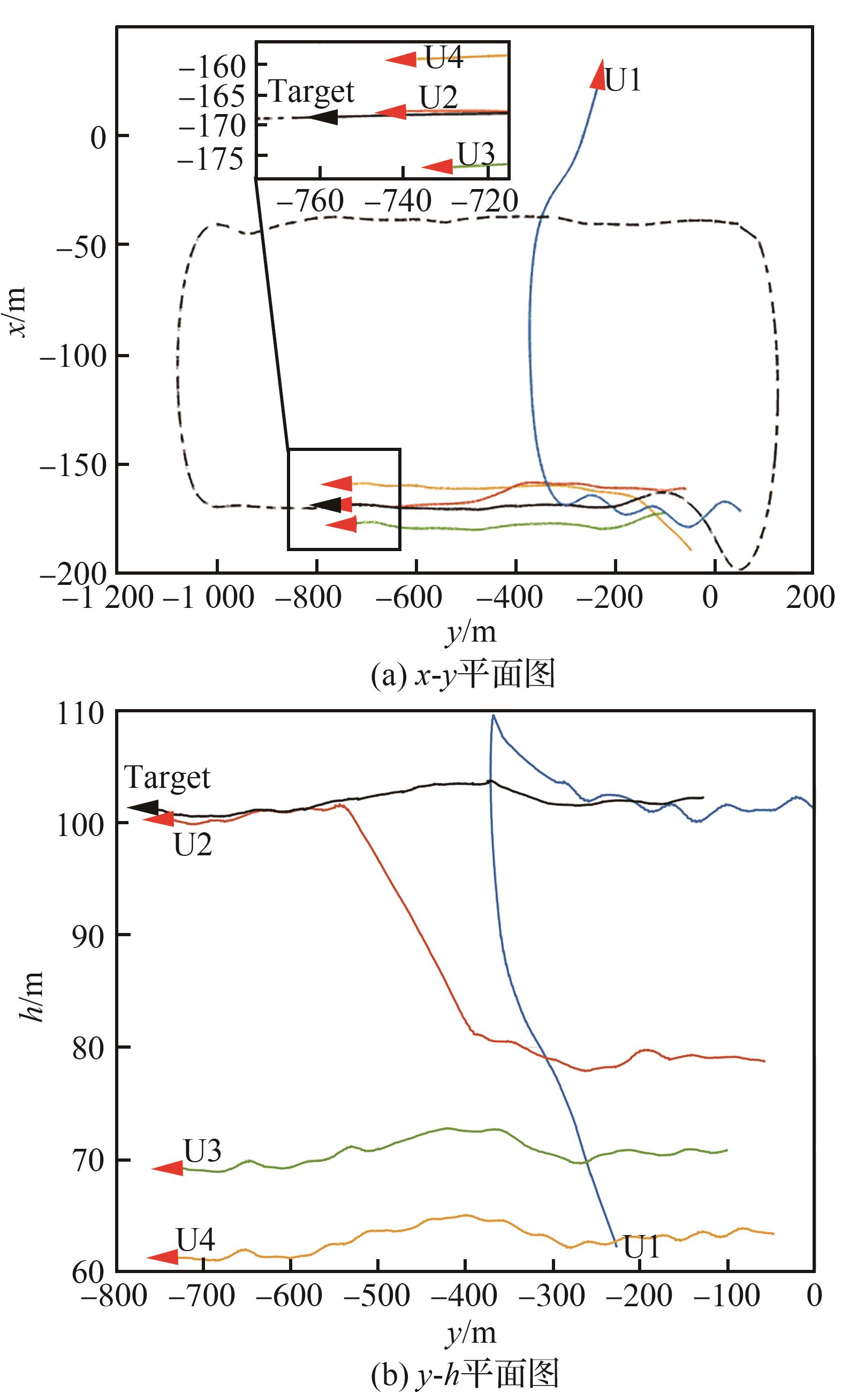

Fig. 14
Software interface of optical 3D motion capture system
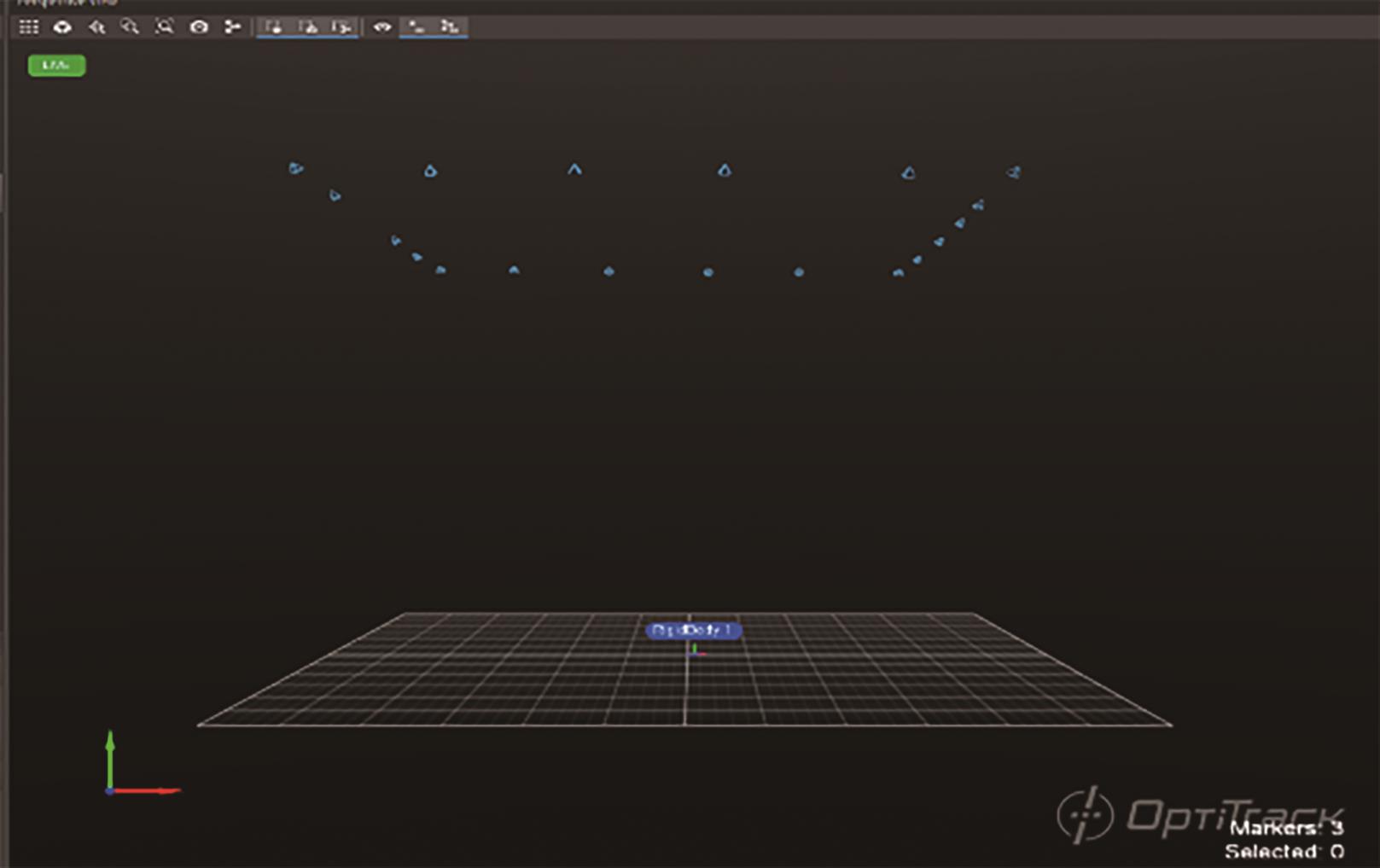

Fig. 15
Installation manner of motion capture balls

Table 1
Visual measurement accuracy at different distances
| 距离/m | 测量误差均值/m |
|---|---|
| 6 | 0.048 |
| 9 | 0.052 |
| 12 | 0.057 |
| 15 | 0.059 |
| 20 | 0.093 |

Fig. 16
Confidence of simulation drogue detection
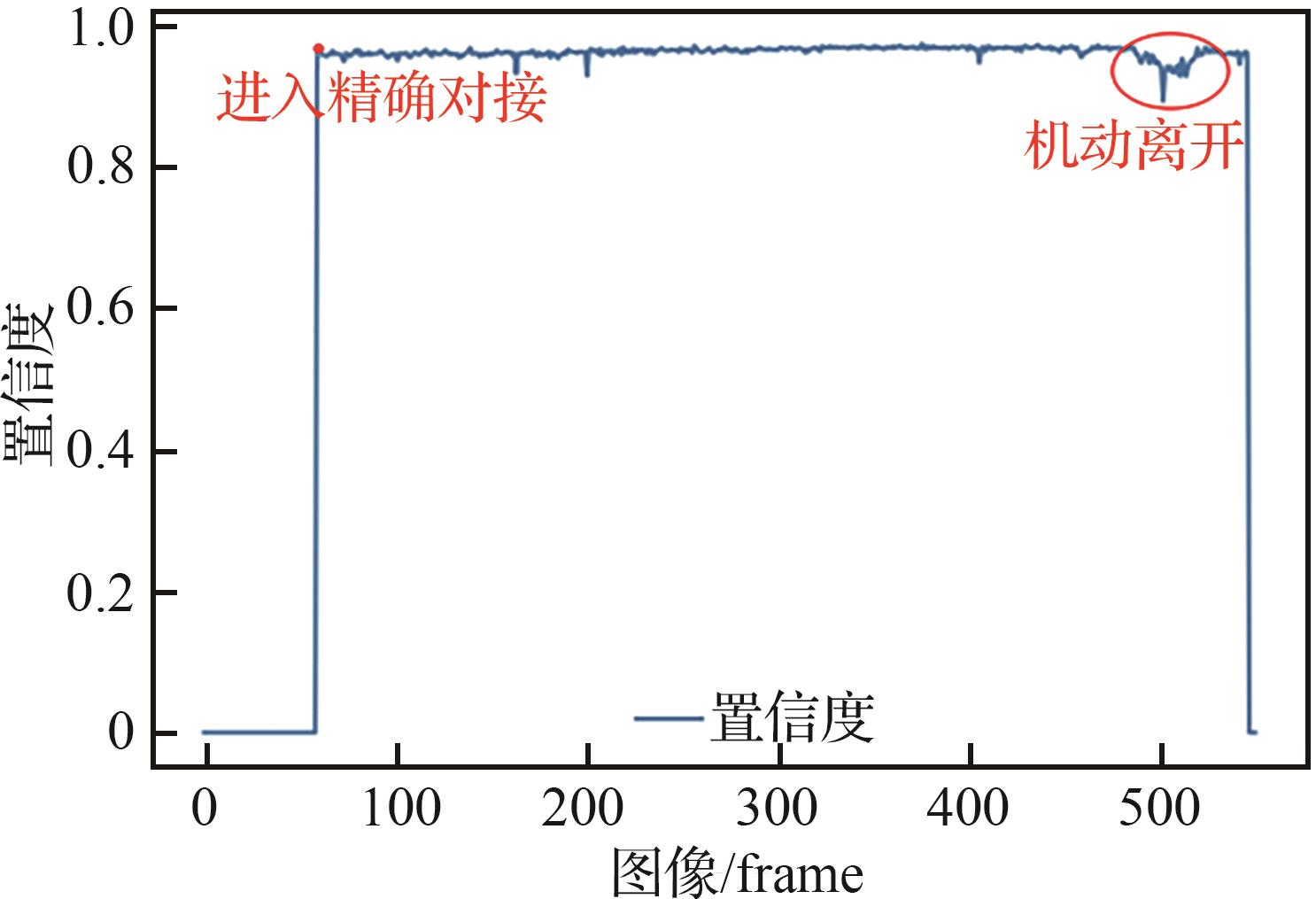

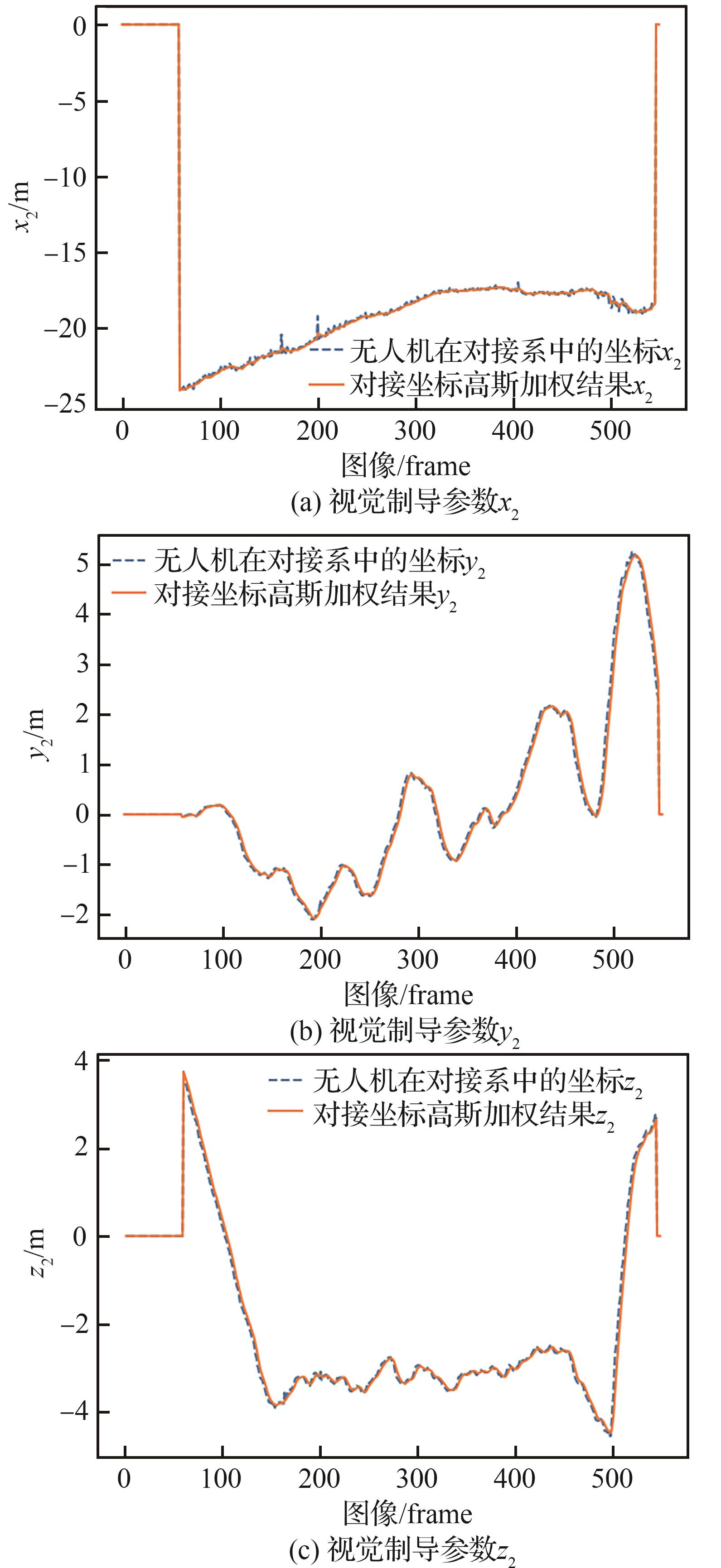
Fig. 17
Results of estimated visual guidance parameters during precise docking
| 1 | 刘多能. 固定翼无人机动态滑翔机理与航迹优化研究[D]. 长沙: 国防科学技术大学, 2016: 1-5. |
| LIU D N. Research on dynamic gliding mechanism and track optimization of fixed-wing UAV[D]. Changsha: National University of Defense Technology, 2016: 1-5. (in Chinese) | |
| 2 | 钟德星, 李永强, 李严桵. 无人机自主空中加油技术现状及发展趋势[J]. 航空科学技术, 2014, 25(5): 1-6. |
| ZHONG D X, LI Y Q, LI Y R. State-of-the-art and tendency of autonomous aerial refueling technologies for unmanned aerial vehicles[J]. Aeronautical Science & Technology, 2014, 25(5): 1-6 (in Chinese). | |
| 3 | 马跃博. 基于卷积神经网络的自主空中加油识别测量技术研究[D]. 成都: 中国科学院大学(中国科学院光电技术研究所), 2020: 1- 14. |
| MA Y B. Research on autonomous aerial refueling recognition and measurement technology based on convolutional neural network[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2020: 1- 14. (in Chinese) | |
| 4 | DUBINS L. On curves of minimal length with a con-straint on average curvature, and with prescribed initial and terminal positions and tangents[J]. American Journal of Mathermatics, 1957, 79(3):497-516. |
| 5 | SONG X Q, HU S Q. 2D path planning with dubins-path-based A* algorithm for a fixed-wing UAV[C]∥ 2017 3rd IEEE International Conference on Control Science and Systems Engineering. Piscataway: IEEE Press, 2017: 69-73. |
| 6 | BURNS B, BLUE P, ZOLLARS M. Autonomous control for automated aerial refueling with minimum-time rendezvous: AIAA-2007-6739[R]. Reston: AIAA, 2007. |
| 7 | WILSON D B, SOTO M Á T, GÖKTOĞAN A H, et al. Real-time rendezvous point selection for a nonholonomic vehicle[C]∥ 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2013 : 3941-3946. |
| 8 | 龚全铨, 袁锁中, 张进. 基于Dubins路径的空中加油自主会合制导与控制[J]. 哈尔滨工程大学学报, 2016, 37(8): 1081-1088. |
| GONG Q Q, YUAN S Z, ZHANG J. Guidance and control of autonomous rendezvous in aerial refueling based on Dubins path planning[J]. Journal of Harbin Engineering University, 2016, 37(8): 1081-1088 (in Chinese). | |
| 9 | GUELMAN M. A qualitative study of proportional navigation[J]. IEEE Transactions on Aerospace and Electronic Systems, 1971, AES-7(4): 637-643. |
| 10 | SMITH A L. Proportional navigation with adaptive terminal guidance for aircraft rendezvous[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(6): 1832-1836. |
| 11 | PARK S, DEYST J, HOW J. A new nonlinear guidance logic for trajectory tracking: AIAA-2004-4900[R]. Reston: AIAA, 2004. |
| 12 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732. |
| WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732 (in Chinese). | |
| 13 | WANG X K. Multi-agent distributed coordination control: Developments and directions via graph viewpoint[J]. Neurocomputing, 2016, 199: 204-218. |
| 14 | 吴立尧, 韩维, 张勇, 等. 基于领航-跟随的有人/无人机编队队形保持控制[J]. 控制与决策, 2021, 36(10): 2435-2441. |
| WU L Y, HAN W, ZHANG Y, et al. Formation keeping control for manned/unmanned aerial vehicle formation based on leader-follower strategy[J]. Control and Decision, 2021, 36(10): 2435-2441 (in Chinese). | |
| 15 | 胡阳修, 贺亮, 赵长春, 等. 基于路径跟随的改进领航-跟随无人机协同编队方法[J]. 飞控与探测, 2021, 4(2): 26-35. |
| HU Y X, HE L, ZHAO C C, et al. Improved method of leader-follower UAV coordinated formation based on path following[J]. Flight Control & Detection, 2021, 4(2): 26-35 (in Chinese). | |
| 16 | 邵壮, 祝小平, 周洲, 等. 三维动态环境下多无人机编队分布式保持控制[J]. 控制与决策, 2016, 31(6): 1065-1072. |
| SHAO Z, ZHU X P, ZHOU Z, et al. Distributed formation keeping control of UAVs in 3-D dynamic environment[J]. Control and Decision, 2016, 31(6): 1065-1072 (in Chinese). | |
| 17 | KIM S, KIM Y. Optimum design of three-dimensional behavioural decentralized controller for UAV formation flight[J]. Engineering Optimization, 2009, 41(3): 199-224. |
| 18 | MATTEI M, SCORDAMAGLIA V. Task priority approach to the coordinated control of a team of flying vehicles in the presence of obstacles[J]. IET Control Theory & Applications, 2012, 6(13): 2103-2110. |
| 19 | VIOLA P, JONES M. Rapid object detection using a boosted cascade of simple features[C]∥ Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2001: 2103-2110. |
| 20 | FELZENSZWALB P, MCALLESTER D, RAMANAN D. A discriminatively trained, multiscale, deformable part model[C]∥ 2008 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2008: 1-8. |
| 21 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single Shot multiBox Detector[C]∥ Computer Vision - ECCV 2016. Cham: Springer International Publishing, 2016: 21-37. |
| 22 | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal speed and accuracy of object detection[DB/OL]. arXiv preprint: 2004.10934, 2020. |
| 23 | WANG Q, ZHANG L, BERTINETTO L, et al. Fast online object tracking and segmentation: A unifying approach[C]∥ 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2019: 1328-1338. |
| 24 | HE K M, ZHANG X Y, REN S Q, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. |
| 25 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]∥ 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 936-944. |
| 26 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 27 | LAW H, DENG J. CornerNet: Detecting objects as paired keypoints[J]. International Journal of Computer Vision, 2020, 128(3): 642-656. |
| 28 | DUAN K W, BAI S, XIE L X, et al. CenterNet: Keypoint triplets for object detection[C]∥ 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2019: 6568-6577. |
| 29 | TIAN Z, SHEN C H, CHEN H, et al. FCOS: Fully convolutional one-stage object detection[C]∥ 2019 IEEE/ CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2019: 9626-9635. |
| 30 | CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers[DB/OL]. arXiv preprint: 2005.12872, 2020. |
| 31 | FORNACIARI M. A fast and effective ellipse detector for embedded vision applications[J]. Pattern Recognition, 2014, 47(11): 3693-3708. |
| 32 | MENG C, LI Z X, BAI X Z, et al. Arc adjacency matrix-based fast ellipse detection[J]. IEEE Transactions on Image Processing, 2020, 29: 4406-4420. |
| 33 | CHEN Q, WU H Y, WADA T. Camera calibration with two arbitrary coplanar circles[C]∥ Proceedings of the 2004 European Conference on Computer Vision (ECCV). Berlin: Springer, 2004: 521-532. |
| 34 | PAUL F, JÉRÔME M, JÖRN R. Visual-inertial calibration toolbox Kalibr[EB/OL]. (2021-10-15)[2021-10-19]. . |
| [1] | Xiangsong HUANG, Mengyu WANG, Dapeng PAN. Adversarial reinforcement learning-based UAV escape path planning method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331637-331637. |
| [2] | Dan CHEN, Cheng TANG, Yu XIE, Yuanyuan MA, Tianshu XU. Real time dual layer path planning of unmanned aerial vehicles for urban low altitude logistics distribution [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331621-331621. |
| [3] | Jianjian LIANG, Shoukun WANG, Shaoming HE. Segmented action guidance strategy for autonomous shipborne landing of fixed-wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531116-531116. |
| [4] | Yifeng WANG, Yiming PENG, Long LI, Xiaohui WEI, Hong NIE. DQN-based active arrest and recovery technique for UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 231448-231448. |
| [5] | Zhen XUE, Hanlin SHENG, Xin CHEN, Pengxuan WEI, Jiacheng LI, Qian CHEN. Global planning method for UAVs based on pruned visibility map [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 331279-331279. |
| [6] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [7] | Zhu WANG, Mengtong ZHANG, Zhenpeng ZHANG, Guangtong XU. Multi-UAV cooperative path planning based on multi-index dynamic priority [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328816-328816. |
| [8] | Jiang ZHAO, Xuan ZHANG, Pei CHI, Yingxun WANG. Self⁃adaptive formation control and dynamic path planning for air⁃ground heterogeneous swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809-329809. |
| [9] | Cheng HE, Yuqi TONG, Xinglu XIA, Gang CHEN. Integrated optimization of energy management strategy and mission path for hybrid-electric VTOL UAVs in cargo transportation [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 229606-229606. |
| [10] | Yanheng GUO, Neng WAN, Qixin ZHUANG, Bo LIU, Xinxin LI, Dao WANG. Optimization method for five⁃axis on⁃machine measurement path based on error distribution graph [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 629261-629261. |
| [11] | Jiayu HAO, Yiming PENG, Xiaohui WEI, Hui MA. Design and analysis of active control arresting device based on MR technology [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 428818-428818. |
| [12] | Xuejian WANG, Yongming WEN, Xiaorong SHI, Ningning ZHANG, Jiexi LIU. Design of hybrid intelligent decision framework for multi⁃agent and multi⁃coupling tasks [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729770-729770. |
| [13] | Lianbo YU, Pinzhao CAO, Liang SHI, Jie LIAN, Dong WANG. An improved conflict⁃based search algorithm for multi⁃agent path planning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727648-727648. |
| [14] | Tongyan WU, Mengzhen HUO, Haibin DUAN, Yimin DENG. Biologically eagle-eye and midbrain mechanism-based saliency detection of UAV aerial refueling targets [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628492-628492. |
| [15] | Xinyu ZHANG, Siyu XIE, Yang TAO, Gun LI. A robust control method for close formation of aerial-refueling UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628425-628425. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341