Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (20): 628775-628775.doi: 10.7527/S1000-6893.2023.28775
• special column • Previous Articles
Honglun WANG1,2( ), Yanxiang WANG1,2,3, Yiheng LIU1,2,4
), Yanxiang WANG1,2,3, Yiheng LIU1,2,4
Received:2023-03-30
Revised:2023-04-27
Accepted:2023-05-30
Online:2023-06-07
Published:2023-06-05
Contact:
Honglun WANG
E-mail:wang_hl_12@126.com
Supported by:CLC Number:
Honglun WANG, Yanxiang WANG, Yiheng LIU. Recovery trajectory optimization for UAV towed aerial recovery based on trajectory mapping[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628775-628775.

Fig.1
Schematic diagram of towed aerial recovery structure[7]
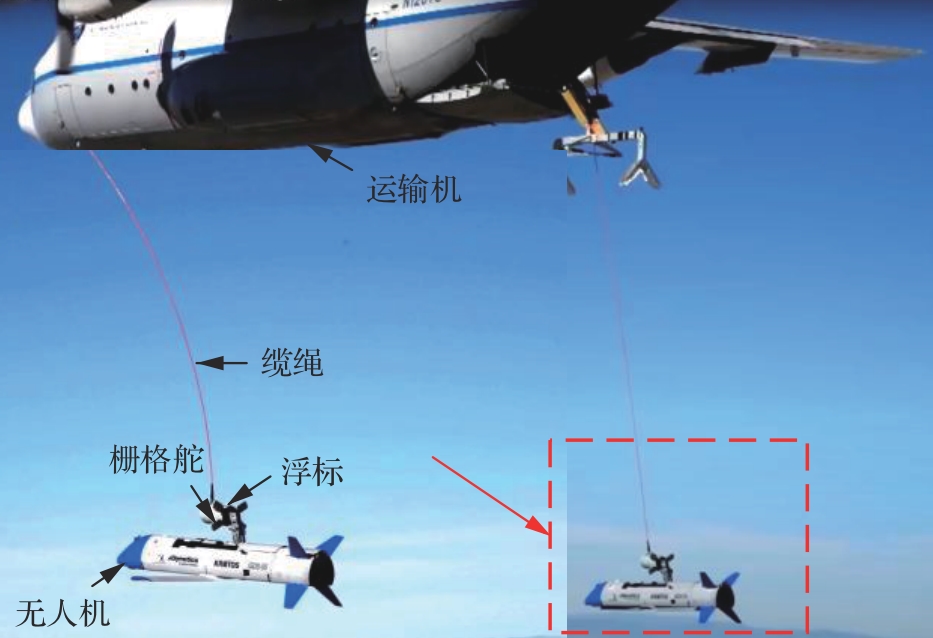

Fig.2
Model of cable-drogue-UAV assembly


Fig.3
Position tracking control scheme

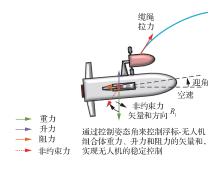
Fig.4
Schematic of force on drogue-UAV assembly

Fig.5
Optimization framework of UAV recovery trajectory based on trajectory mapping network
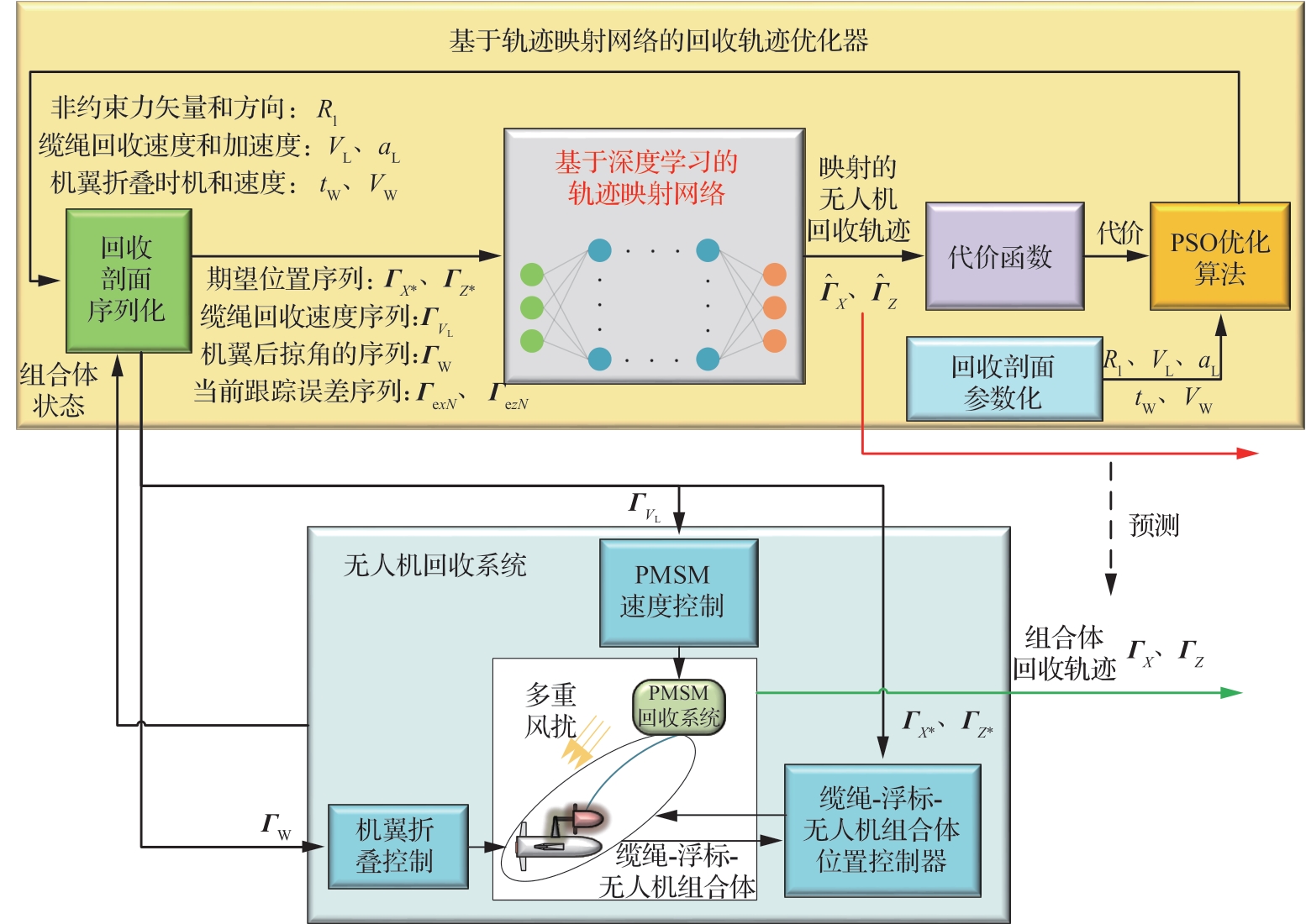
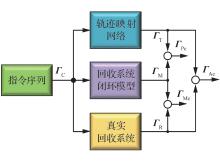
Fig.6
Error analysis of trajectory optimization
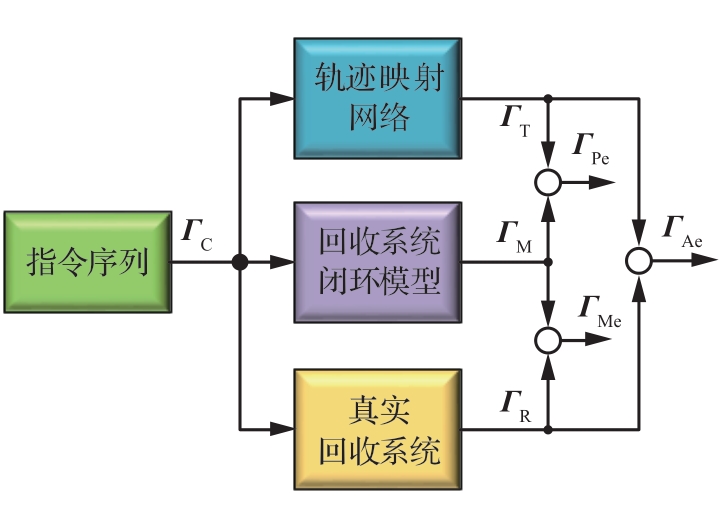

Fig.7
Cable recovery speed profile

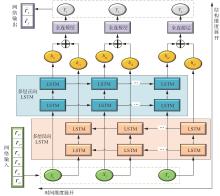
Fig.8
Structure diagram of trajectory mapping network based on BiLSTM


Fig.9
Data generation and training methods for trajectory mapping network

Table 1
Comparison between parameters and test results of BiLSTM and LSTM
| 网络参数 | BiLSTM | LSTM |
|---|---|---|
| 每层节点数 | 100 | 100 |
| 网路层数 | 3 | 3 |
| 训练集大小(轨迹条数) | 20 000 | 20 000 |
| 训练批量大小(轨迹条数) | 20 | 20 |
| 训练次数 | 10 000 | 10 000 |
| 初始学习率 | 0.001 | 0.001 |
| 优化器 | Adam | Adam |
| 测试集大小(轨迹条数) | 2 000 | 2 000 |
| 测试集的均方根误差 | 0.117 3 | 0.220 0 |

Fig.10
Trajectory mapping results of test set (Scenario 1)

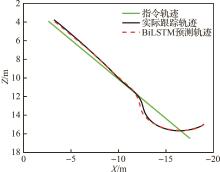
Fig.11
Trajectory mapping results of test set (Scenario 2)
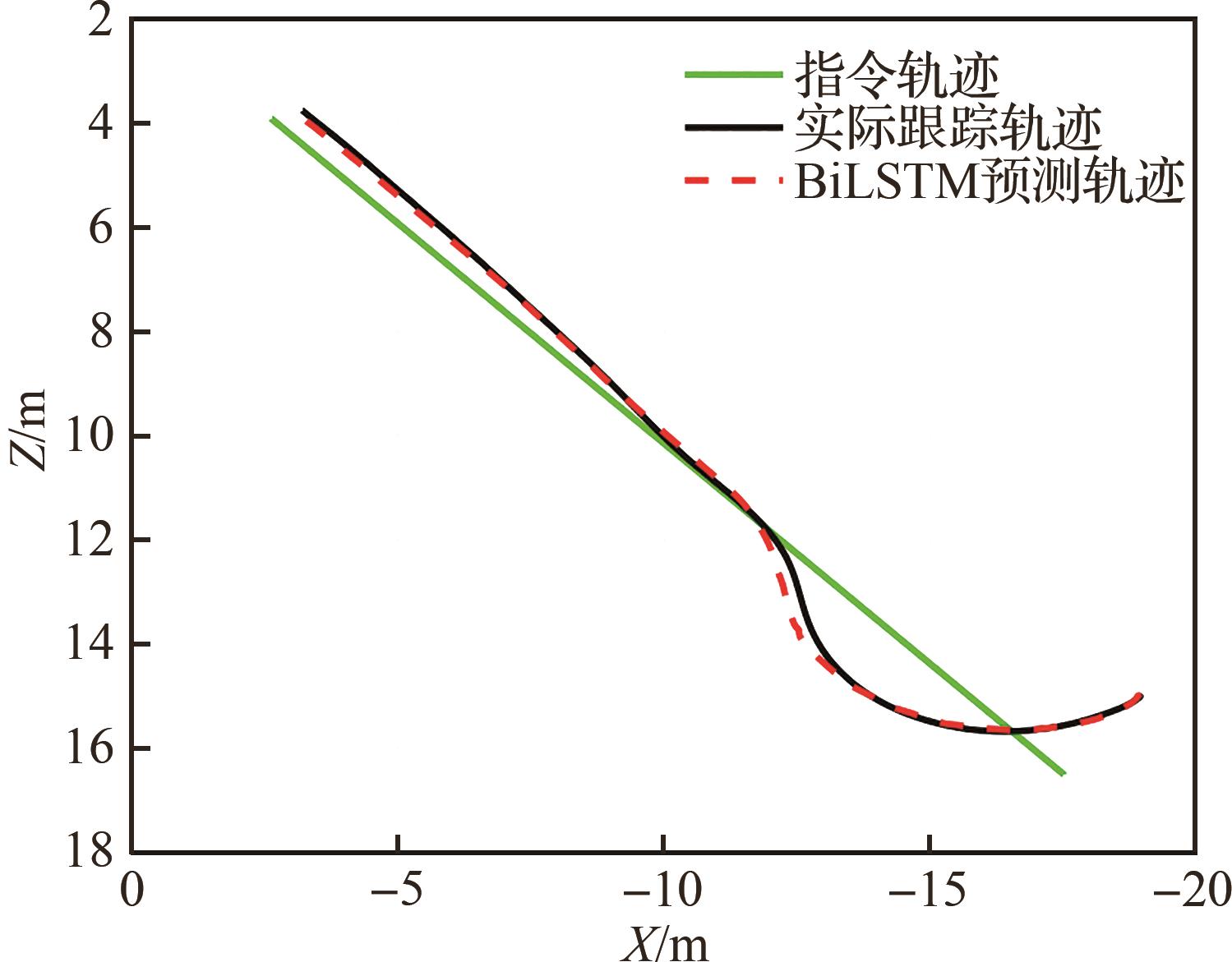
Fig.12
Trajectory mapping results of test set (Scenario 3)
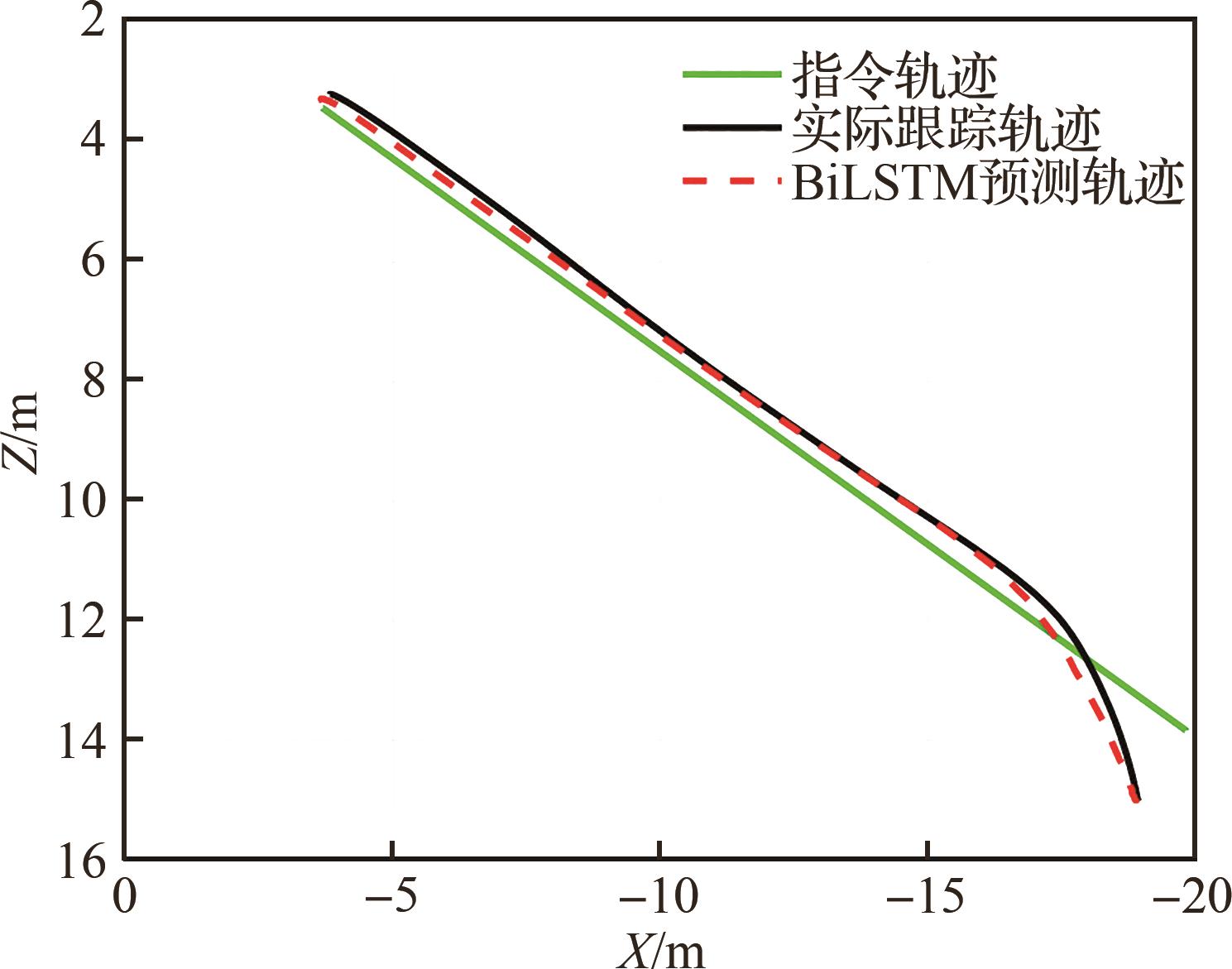

Fig.13
Average error distribution of trajectory mapping network


Fig.14
Comparison of running time of each mapping model
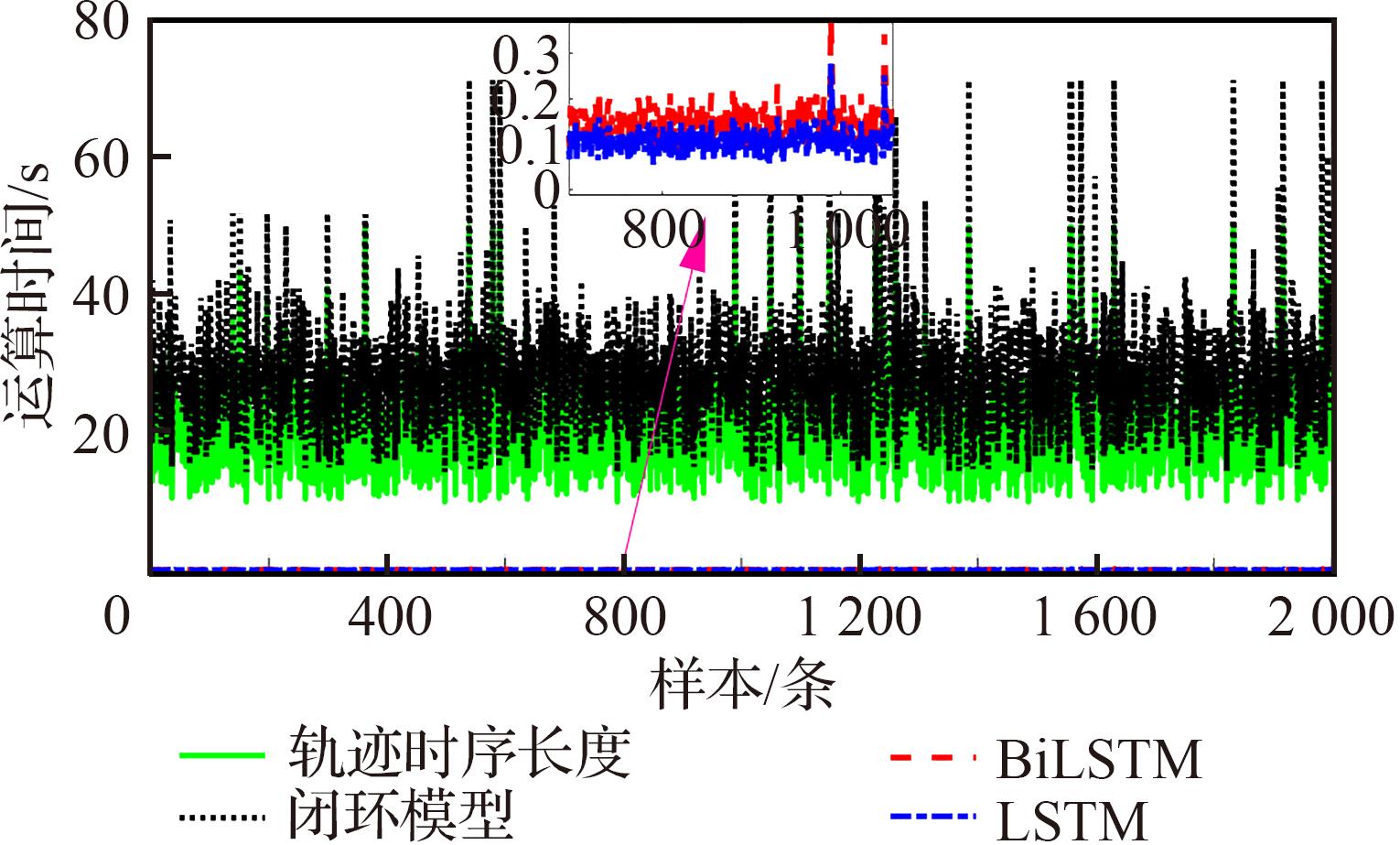

Fig.15
Comparison of wing folding and cable retrieval profiles


Fig.16
Comparison between commands and actual recovery trajectories

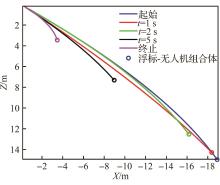
Fig.17
Shape change curves of cable during recovery
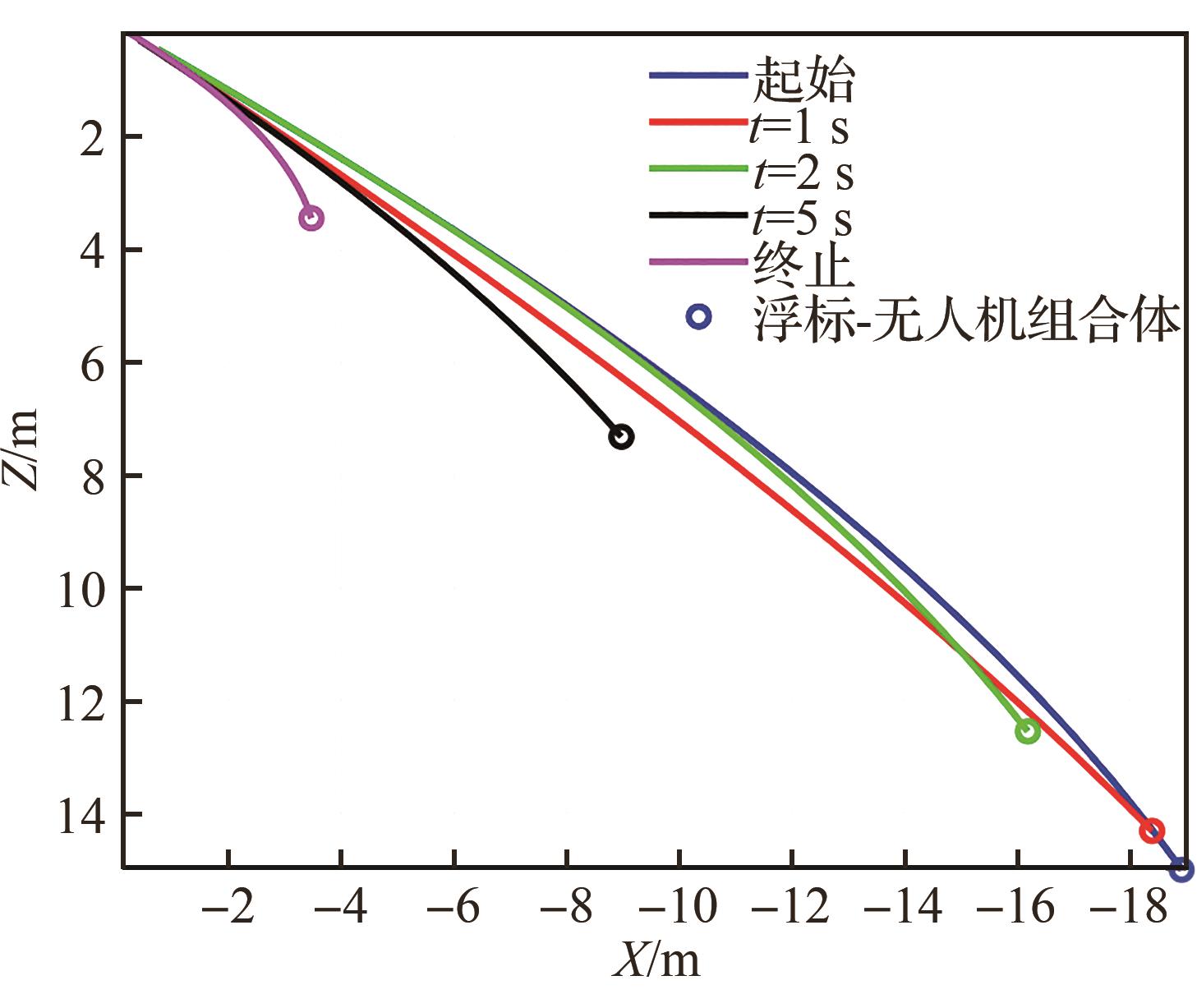
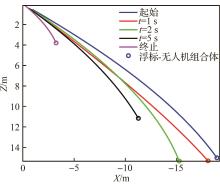
Fig.18
Change curves of cable of comparison method

Fig.19
Comparison of combination state curves in recovery process
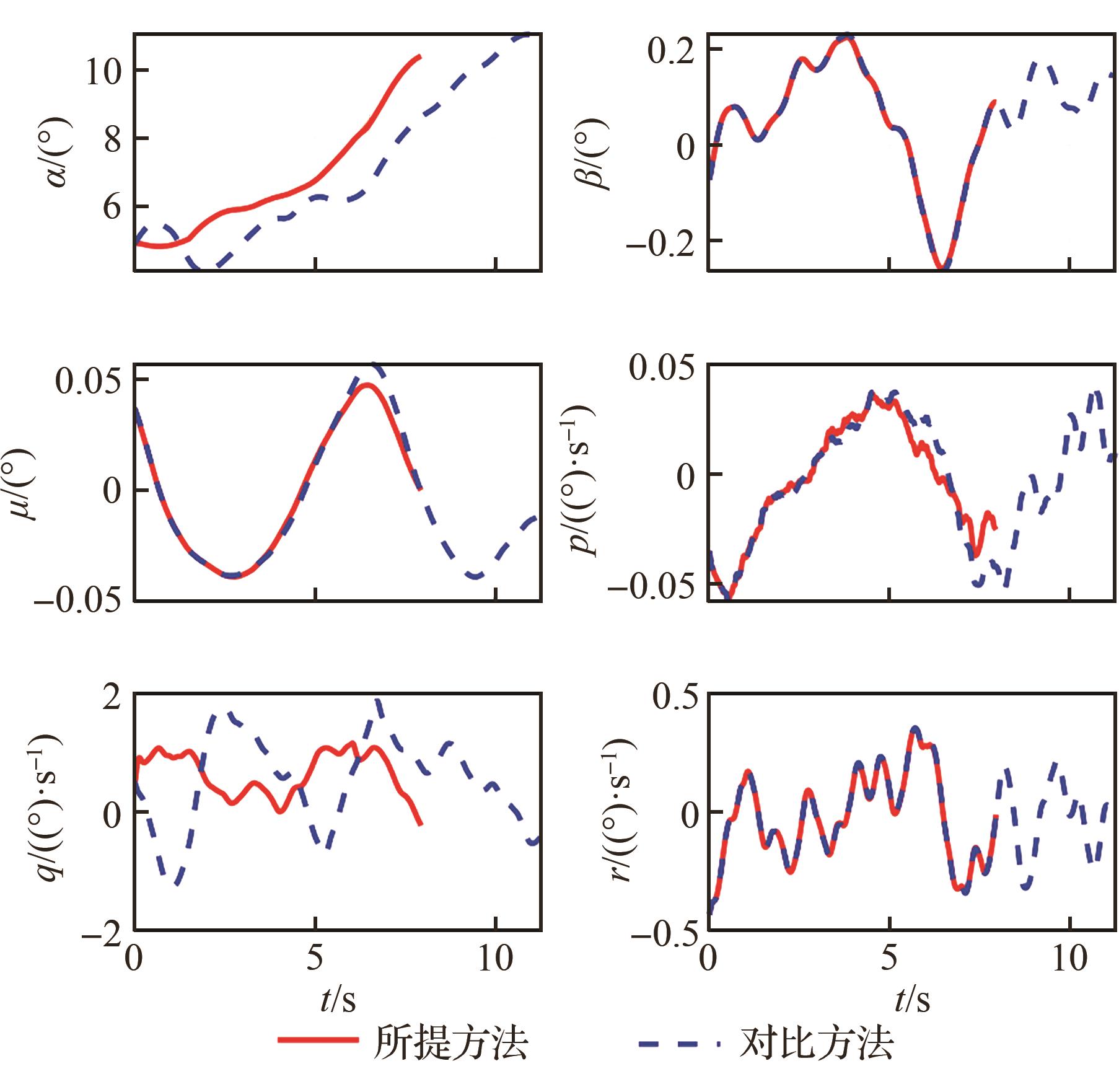

Fig.20
Comparison of drogue-UAV-assembly control inputs in recovery process
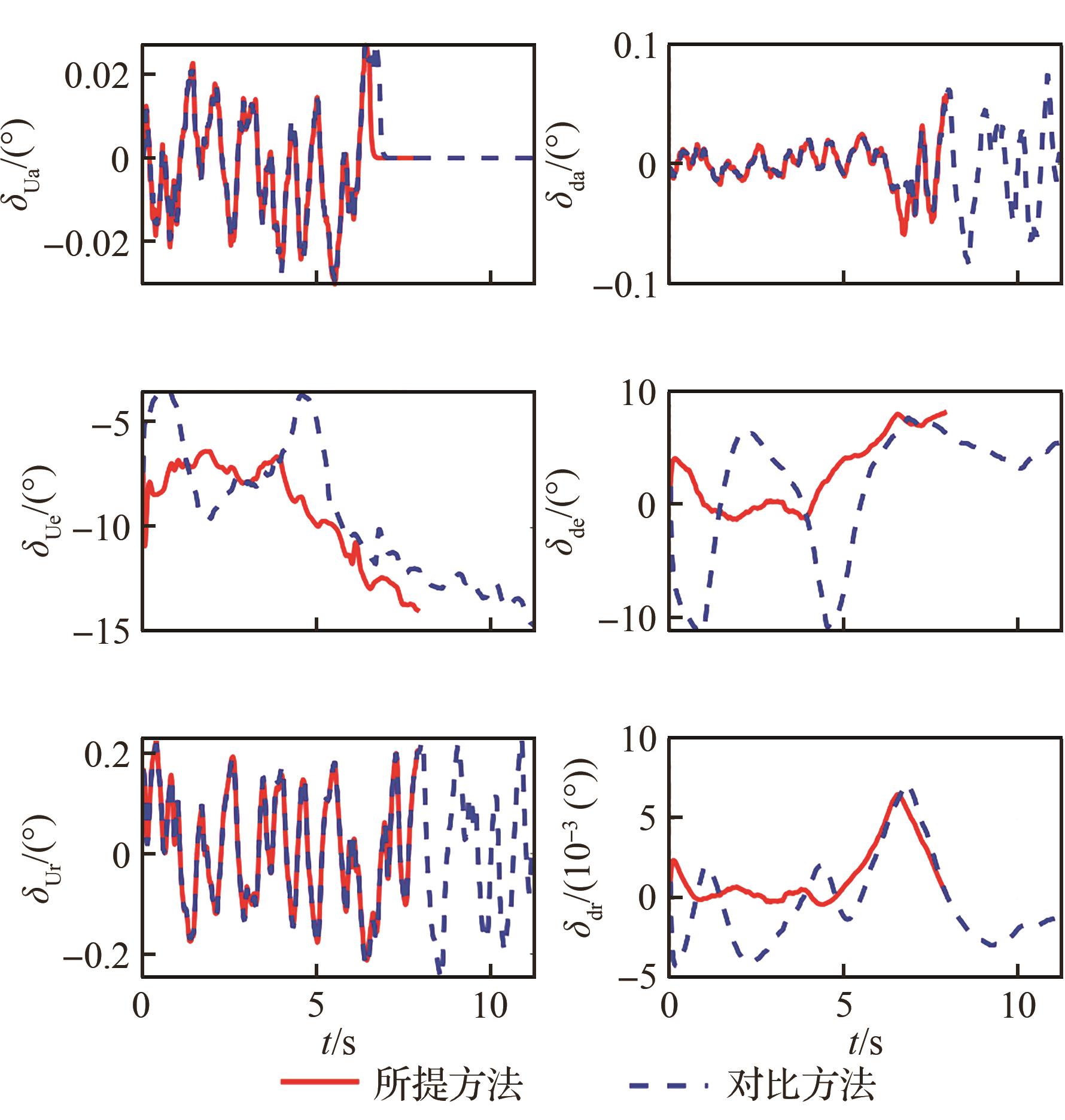

Fig.21
Wind on UAV during recovery process using proposed method
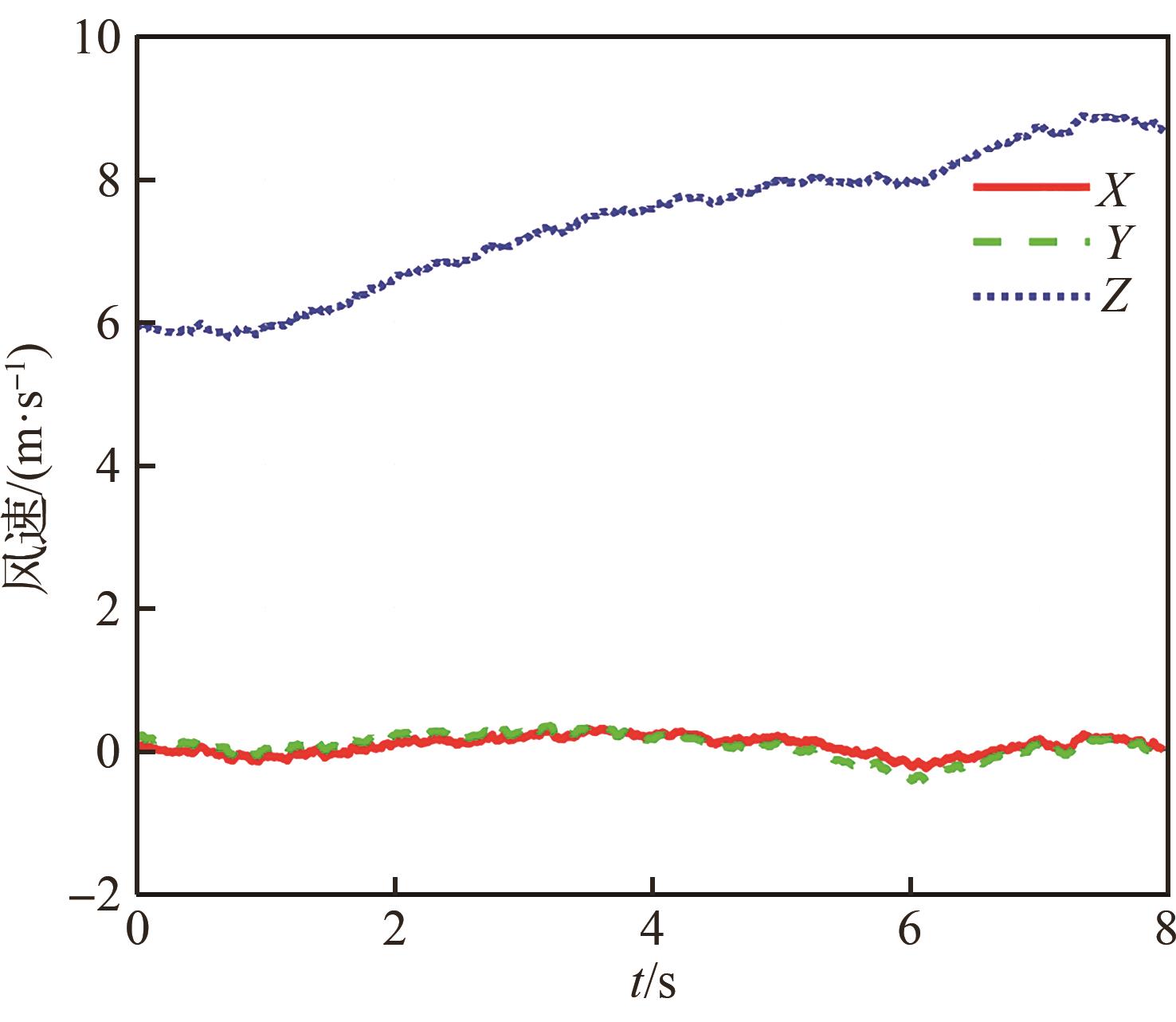
Table 2
Comparison of UAV recovery trajectory indicators through 50 Monte Carlo simulations
参数 摄动/% | 所提方法 | 对比方法 | ||||
|---|---|---|---|---|---|---|
摆动 幅度/m | 回收 时间/s | 总代价 | 摆动 幅度/m | 回收 时间/s | 总代价 | |
| -20 | 0.456 | 8.01 | 8.922 | 1.915 | 11.29 | 15.120 |
| 0 | 0.439 | 8.01 | 8.888 | 1.857 | 11.29 | 15.004 |
| 20 | 0.504 | 8.01 | 9.018 | 2.031 | 11.29 | 15.352 |
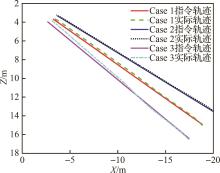
Fig.22
Trajectory optimization results at different initial positions
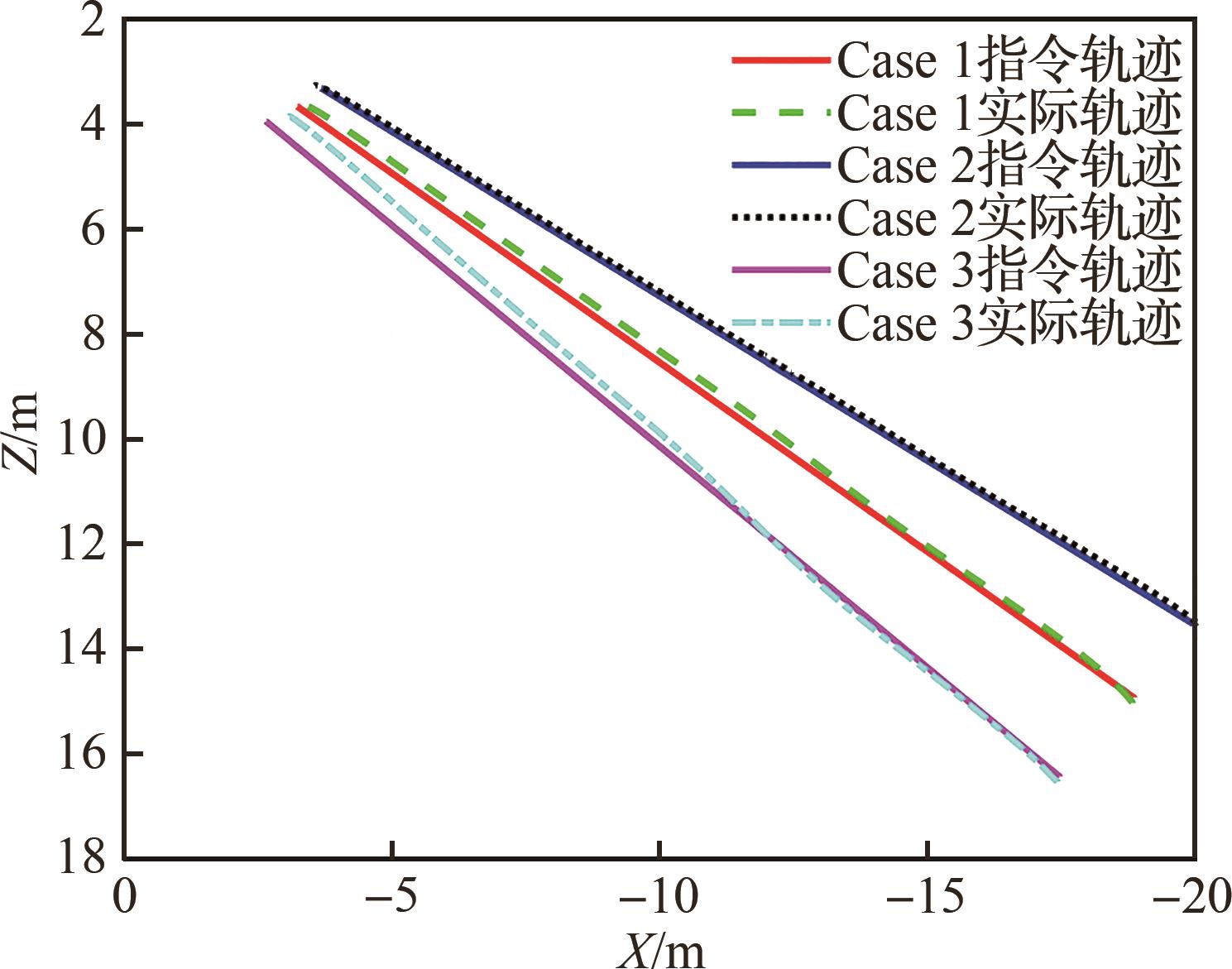

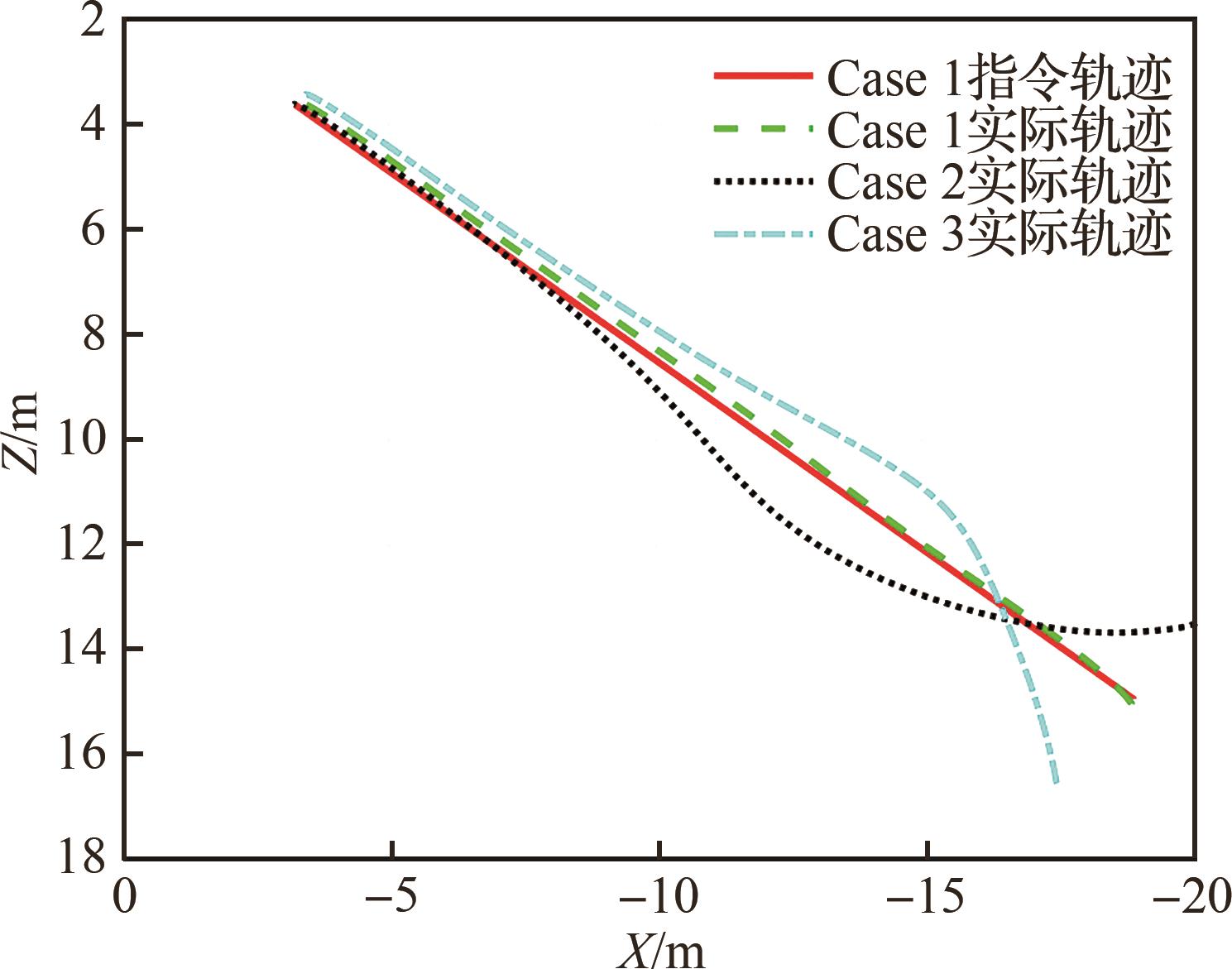
Fig.23
Recovery trajectories under the same optimization command at different initial positions
| 1 | 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732. |
| WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732 (in Chinese). | |
| 2 | 苏子康, 徐忠楠, 李春涛, 等. 伸缩套臂式无人机空基回收建模与对接控制[J]. 航空学报, 2023, 44(1): 227-244. |
| SU Z K, XU Z N, LI C T, et al. Modeling and docking control of UAV aerial recovery in form of telescopic boom[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(1): 227-244 (in Chinese). | |
| 3 | 向锦武, 董希旺, 丁文锐, 等. 复杂环境下无人集群系统自主协同关键技术[J]. 航空学报, 2022, 43(10): 527570. |
| XIANG J W, DONG X W, DING W R, et al. Key technologies for autonomous cooperation of unmanned swarm systems in complex environments[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(10): 527570 (in Chinese). | |
| 4 | 黄雷. 美军小精灵无人机群项目发展现状综述[J]. 飞航导弹, 2018(7): 44-47. |
| HUANG L. Summary of the development status of the US army elf UAV group project[J]. Aerodynamic Missile Journal, 2018(7): 44-47 (in Chinese). | |
| 5 | WANG Y X, WANG H L, LIU B L, et al. A visual navigation framework for the aerial recovery of UAVs [J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-13. |
| 6 | 苏子康, 陈海通, 李春涛, 等. 非匹配包线下无人机空基回收拖曳系统协调运动规划[J]. 航空学报, 2023, 44(10): 195-211. |
| SU Z K, CHEN H T, LI C T, et al. Coordinating motion planning for towed cable system in UAV aerial recovery with unmatched envelope[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(10): 195-211 (in Chinese). | |
| 7 | HOCHSTETLER R D, BOSMA J, CHACHAD G, et al. Lighter-than-air (LTA) “AirStation” - unmanned aircraft system (UAS) carrier concept[C]∥ Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference. Reston, Virginia: AIAA, 2016: AIAA2016-4223. |
| 8 | 陈嘉, 李雪兵, 徐忠楠, 等. 空基回收无人机头部扰流场CFD仿真与分析[J]. 航空科学技术, 2022, 33(10): 103-110. |
| CHEN J, LI X B, XU Z N, et al. CFD simulation and analysis of aerial recovery UAV bow wave[J]. Aeronautical Science & Technology, 2022, 33(10): 103-110 (in Chinese). | |
| 9 | SU Z K, LI C T, WU J F, et al. Neuro-adaptive prescribed performance control for aerial-recovery drogue with actuator constraints[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(8): 1451-1465. |
| 10 | SU Z K, LIU Y H, WANG H L. Probe dynamics direct control for aerial recovery with preassigned docking performance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 3509-3523. |
| 11 | LIU Y H, WANG H L, FAN J X, et al. Trajectory stabilization control for aerial recovery of cable-drogue-UAV assembly[J]. Nonlinear Dynamics, 2021, 105(4): 3191-3210. |
| 12 | WILLIAMS P, SGARIOTO D, TRIVAILO P M. Constrained path-planning for an aerial-towed cable system[J]. Aerospace Science and Technology, 2008, 12(5): 347-354. |
| 13 | 陈海通,苏子康,李春涛,等.空基回收拖曳系统直线-盘旋转接段运动轨迹设计[J/OL].北京航空航天大学学报,(2022-11-08) [2023-05-13]. . |
| CHEN H T, SU Z K, LI C T, et al. Trajectory design for transition flight process of the aerial recovery system [J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2022-11-08) [2023-05-13] (in Chinese) . | |
| 14 | NICHOLS J W, SUN L, BEARD R W, et al. Aerial rendezvous of small unmanned aircraft using a passive towed cable system[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(4): 1131-1142. |
| 15 | SUN L A, HEDENGREN J D, BEARD R W. Optimal trajectory generation using model predictive control for aerially towed cable systems[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(2): 525-539. |
| 16 | MERZ M, JOHANSEN T A. Control of an end body towed by a circling unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(12): 2677-2686. |
| 17 | 苏子康,李春涛,余跃,等. 绳系拖曳飞行器高抗扰轨迹跟踪控制[J]. 北京航空航天大学学报,2021, 47(11): 2234-2248. |
| SU Z K, LI C T, YU Y, et al. High anti-disturbance trajectory tracking control for cable towed vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(11): 2234-2248 (in Chinese). | |
| 18 | TANAKA K, TANAKA M, TAKAHASHI Y, et al. 3-D flight path tracking control for unmanned aerial vehicles under wind environments[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 11621-11634. |
| 19 | 苏子康. 多重复杂干扰作用下无人机软式自主空中加油精准对接控制[D]. 北京:北京航空航天大学,2018: 49-56. |
| SU Z K. Accurate docking control for UAV autonomous probe-drogue refueling under multiple complex disturbances[D]. Beijing: Beihang University, 2018: 49-56 (in Chinese). | |
| 20 | WANG H T, DONG X M, XUE J P, et al. Dynamic modeling of a hose-drogue aerial refueling system and integral sliding mode backstepping control for the hose whipping phenomenon[J]. Chinese Journal of Aeronautics, 2014, 27(4): 930-946. |
| 21 | SONG N N, PENG H J, KAN Z Y, et al. A novel nonsmooth approach for flexible multibody systems with contact and friction in 3D space[J]. Nonlinear Dynamics, 2020, 102(3): 1375-1408. |
| 22 | 蔡云鹏, 王延祥, 王大勇, 等. 加油软管释放过程中的动态特性研究[J]. 战术导弹技术, 2022(6): 54-62. |
| CAI Y P, WANG Y X, WANG D Y, et al. Study on dynamic characteristics of refueling hose during release[J]. Tactical Missile Technology, 2022(6): 54-62 (in Chinese). | |
| 23 | WANG Y X, WANG H L, LIU Y H, et al. Modeling and predefined-time anti-disturbance control for the aerial refueling phase of receiver aircraft[J]. Applied Mathematical Modelling, 2022, 112: 540-559. |
| 24 | LIU Y H, WANG H L, FAN J X, et al. Control-oriented UAV highly feasible trajectory planning: a deep learning method[J]. Aerospace Science and Technology, 2021, 110: 106435. |
| 25 | LIU Y H, WANG H L, FAN J X. Novel docking controller for autonomous aerial refueling with probe direct control and learning-based preview method[J]. Aerospace Science and Technology, 2019, 94: 105403. |
| 26 | 李文成. 变体飞行器动力学建模与稳定性分析及控制[D]. 南京: 南京航空航天大学,2018: 7. |
| LI W C. Dynamics modeling, stability analysis and control of morphing aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018: 7 (in Chinese). | |
| 27 | LIU Y H, WANG H L, WANG Y X, et al. Anti-swing coordinated control of the UAV wing folding during the aerial recovery process[C]∥International Conference on Guidance, Navigation and Control. Singapore: Springer, 2023: 5212-5220. |
| 28 | KENNEDY J, EBERHART R. Particle swarm optimization[C]∥ Proceedings of ICNN’95 - International Conference on Neural Networks. Piscataway: IEEE Press, 2002: 1942-1948. |
| 29 | HORNIK K, STINCHCOMBE M, WHITE H. Multilayer feedforward networks are universal approximators[J]. Neural Networks, 1989, 2(5): 359-366. |
| 30 | 杨超, 张开富. 基于PSO-BiLSTM神经网络的机身筒段应力预测[J]. 航空学报, 2023, 44(7): 266-275. |
| YANG C, ZHANG K F. Stress prediction of fuselage tube section based on PSO-BiLSTM neural network[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(7): 266-275 (in Chinese). | |
| 31 | WU T C, WANG H L, YU Y, et al. Hierarchical fault-tolerant control for over-actuated hypersonic reentry vehicles[J]. Aerospace Science and Technology, 2021, 119: 107134. |
| 32 | 王志刚, 王业光, 杨宁, 等. 基于LSTM的飞行数据挖掘模型构建方法[J]. 航空学报, 2021, 42(8): 525800. |
| WANG Z G, WANG Y G, YANG N, et al. Construction method of flight data mining model based on LSTM[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525800 (in Chinese). |
| [1] | Zhongzhi LI, Jinyi MA, Jianliang AI, Yiqun DONG. Fault detection and classification of aerospace sensors using deep neural networks finetuned from VGG16 [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727615-727615. |
| [2] | Wu LIU, Yunyan WU, Wei LIU, Mingming TIAN, Tianpeng HUANG. Re-entry robust fault tolerant attitude control for RLVs considering unknown disturbances [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727787-727787. |
| [3] | Chenyang LIU, Dawei WU, Yize GUO, Xinsai LV, Jiani ZHOU, Shuyi SHAO. Robust adaptive attitude control of quadrotor with uncertain strong coupling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645-727645. |
| [4] | Zhikai WANG, Sheng CHEN, Wei FAN. Effect of neural network width on combustor emission prediction [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 126816-126816. |
| [5] | Lei HE, Weiqi QIAN, Kangsheng DONG, Xian YI, Congcong CHAI. Aerodynamic characteristics modeling of iced airfoil based on convolution neural networks [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 126434-126434. |
| [6] | Xuan CHENG, Yixi ZHAO, Shuman YOU. Trajectory optimization of robot-assisted flexible flanging [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(4): 426886-426886. |
| [7] | Chen ZHANG, Hao ZHANG. Lunar-gravity-assisted low-energy transfer from Earth into Distant Retrograde Orbit (DRO) [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 326507-326507. |
| [8] | Wei LI, Yan GUO, Ning LI, Cuntao LIU, Hao YUAN. Intelligent reflector surface assisted UAV mobile edge computing task data maximization method [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 328486-328486. |
| [9] | Xiangwei ZHU, Dan SHEN, Kai XIAO, Yuexin MA, Xiang LIAO, Fuqiang GU, Fangwen YU, Kefu GAO, Jingnan LIU. Mechanisms, algorithms, implementation and perspectives of brain⁃inspired navigation [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 28569-028569. |
| [10] | Chenglei YUE, Xuechuan WANG, Xiaokui YUE, Ting SONG. A spacecraft rendezvous and docking method based on inverse reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 328420-328420. |
| [11] | Huailu LI, Xu WANG, Xiao WANG, Tong ZHAO, Weiwei ZHANG. Aerodynamic modeling and flight simulation of maneuver flight at high angle of attack [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 128410-128410. |
| [12] | Yiming LIANG, Guangning LI, Min XU. Method for numerical virtual flight with intelligent control based on machine learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 128098-81280986. |
| [13] | Lianzi WANG, Ling WANG, Daiyin ZHU. An ISAR autofocus imaging algorithm based on FCN and transfer learing [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328172-328172. |
| [14] | Leliang REN, Yong XIAN, Shaopeng LI, Gang LEI, Wei WU, Bing LI. A neural network model for impact point prediction of ballistic missile based on improved second-order optimizer with parallel learning [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 327964-327964. |
| [15] | Yucun SONG, Quanbo GE, Junlong ZHU, Zhenyu LU. Improved YOLOX object detection algorithm based on gradient difference adaptive learning rate optimization [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(14): 327951-327951. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341