ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (4): 426886-426886.doi: 10.7527/S1000-6893.2022.26886
• Material Engineering and Mechanical Manufacturing • Previous Articles
Xuan CHENG1, Yixi ZHAO1( ), Shuman YOU2
), Shuman YOU2
Received:2021-12-31
Revised:2022-01-25
Accepted:2022-03-13
Online:2022-06-09
Published:2022-06-08
Contact:
Yixi ZHAO
E-mail:yxzhao@sjtu.edu.cn
Supported by:CLC Number:
Xuan CHENG, Yixi ZHAO, Shuman YOU. Trajectory optimization of robot-assisted flexible flanging[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(4): 426886-426886.

Fig. 1
Schematic diagram of robot-assisted flexible flanging
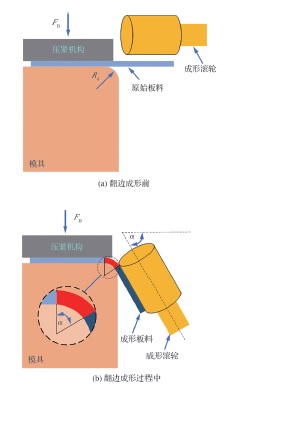

Fig. 2
Schematic diagram of robot-assisted flexible flanging trajectory
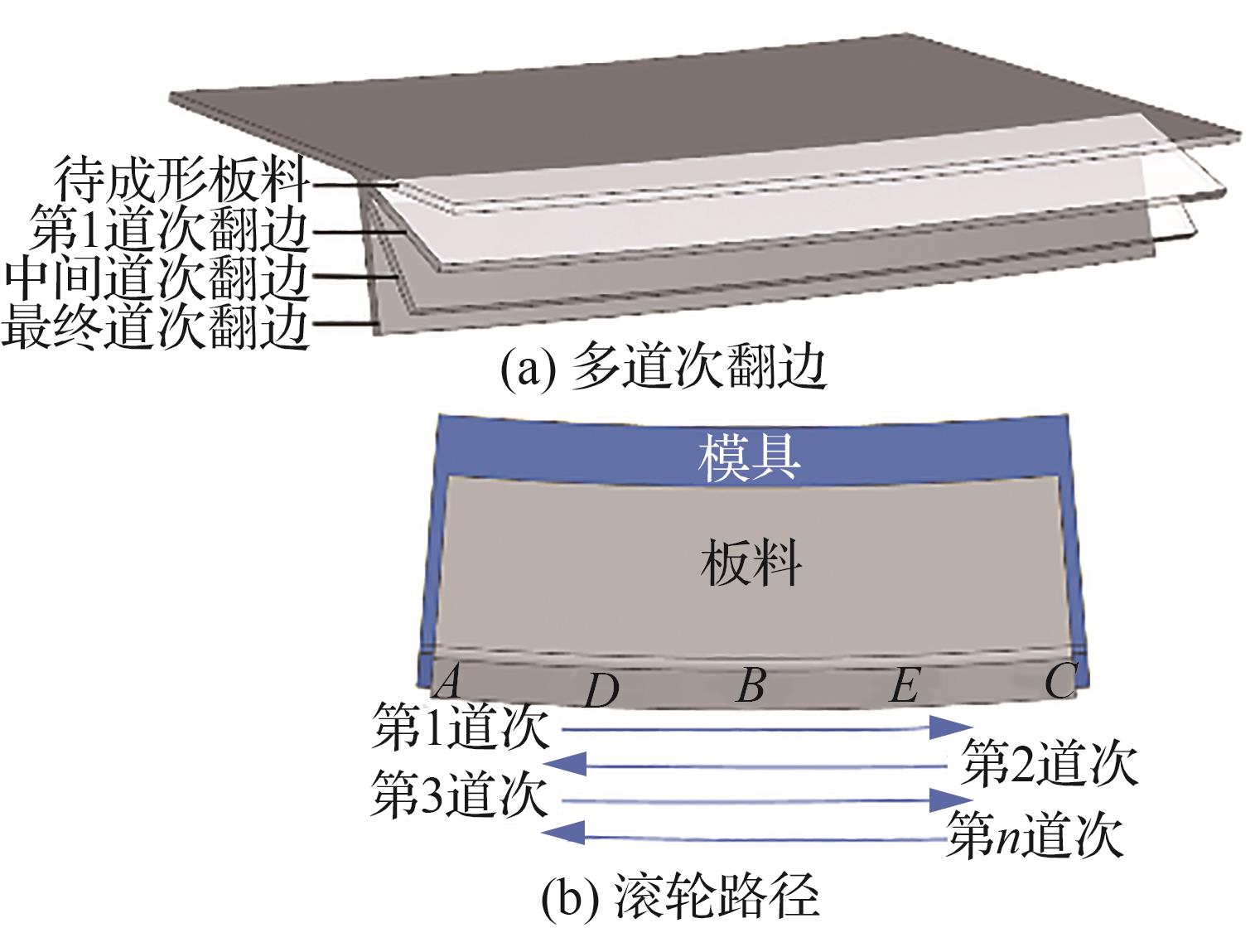

Fig. 3
Schematic diagram of characteristic flanging part
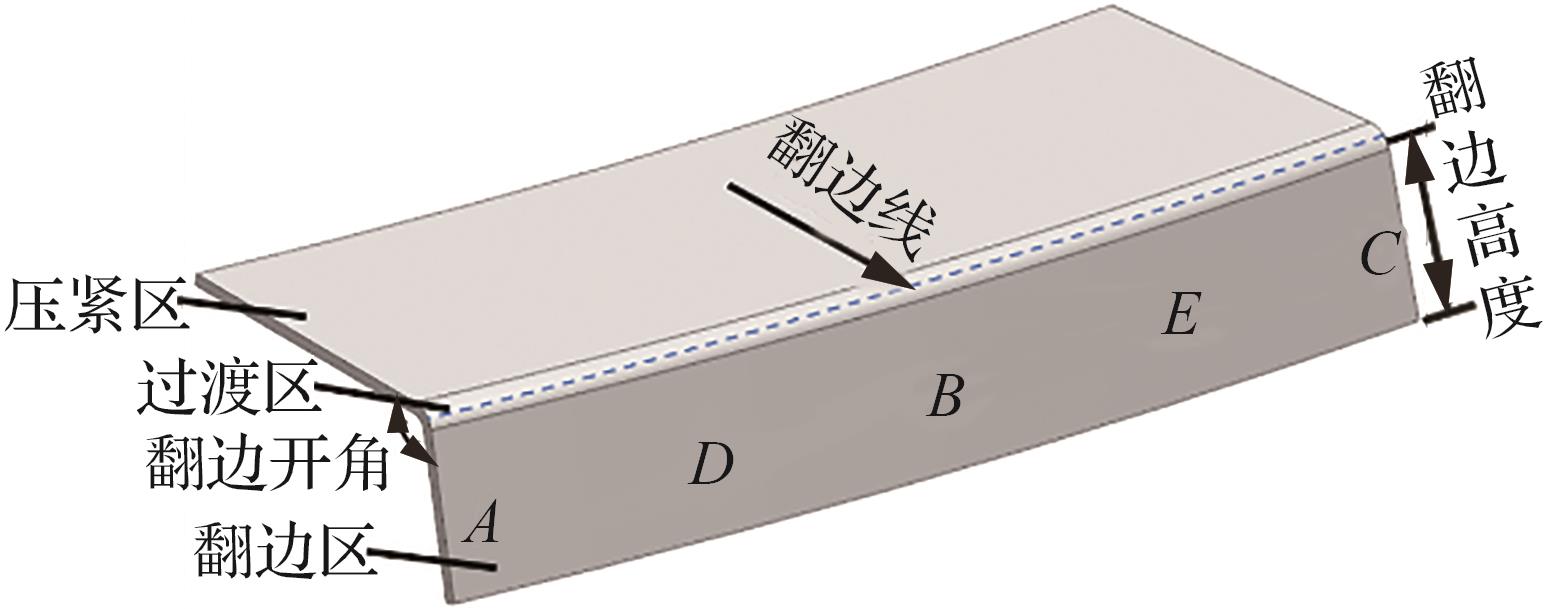

Fig. 4
Flanging path of characteristic flanging part
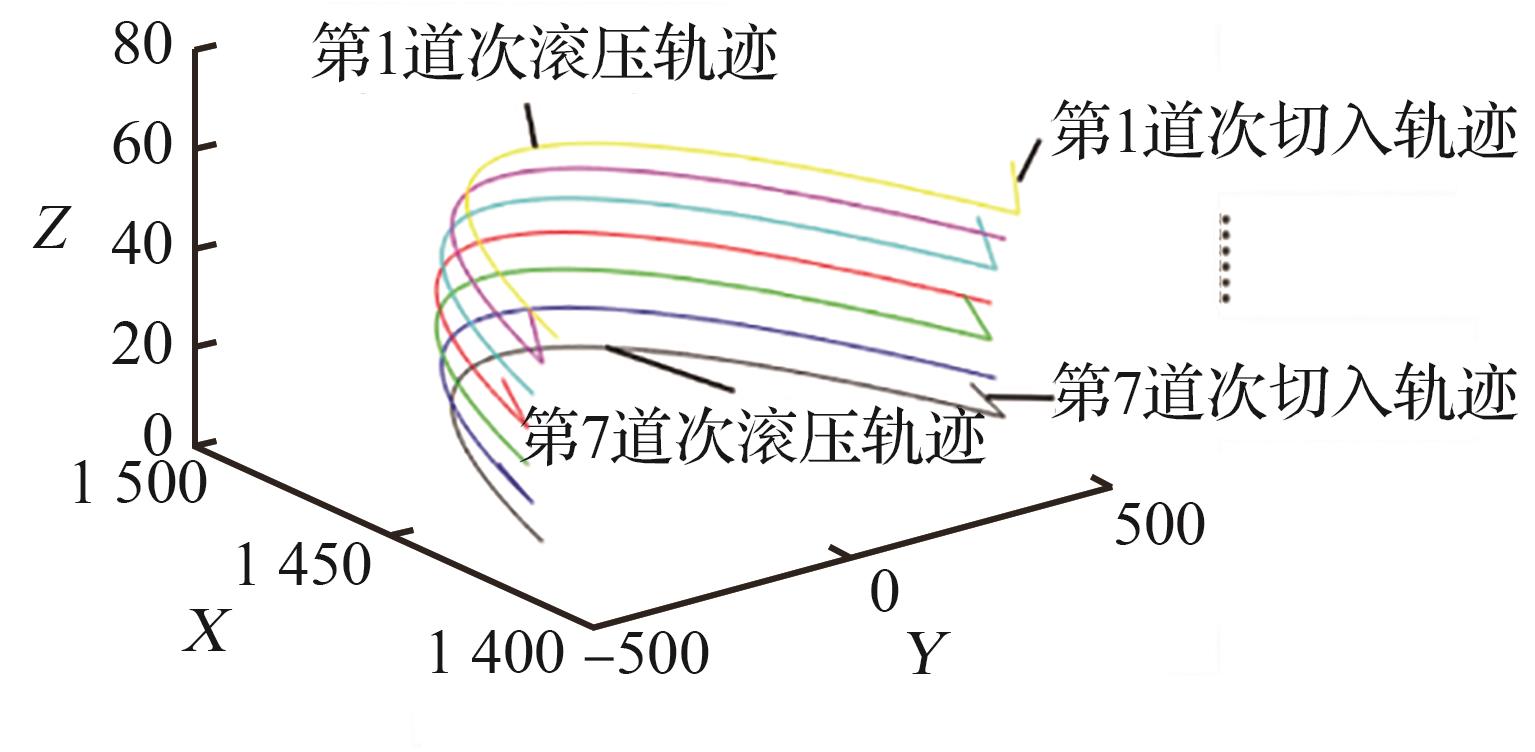

Fig. 5
Assembly diagram of simulation model


Fig. 6
Mesh subdivision in different areas of sheet
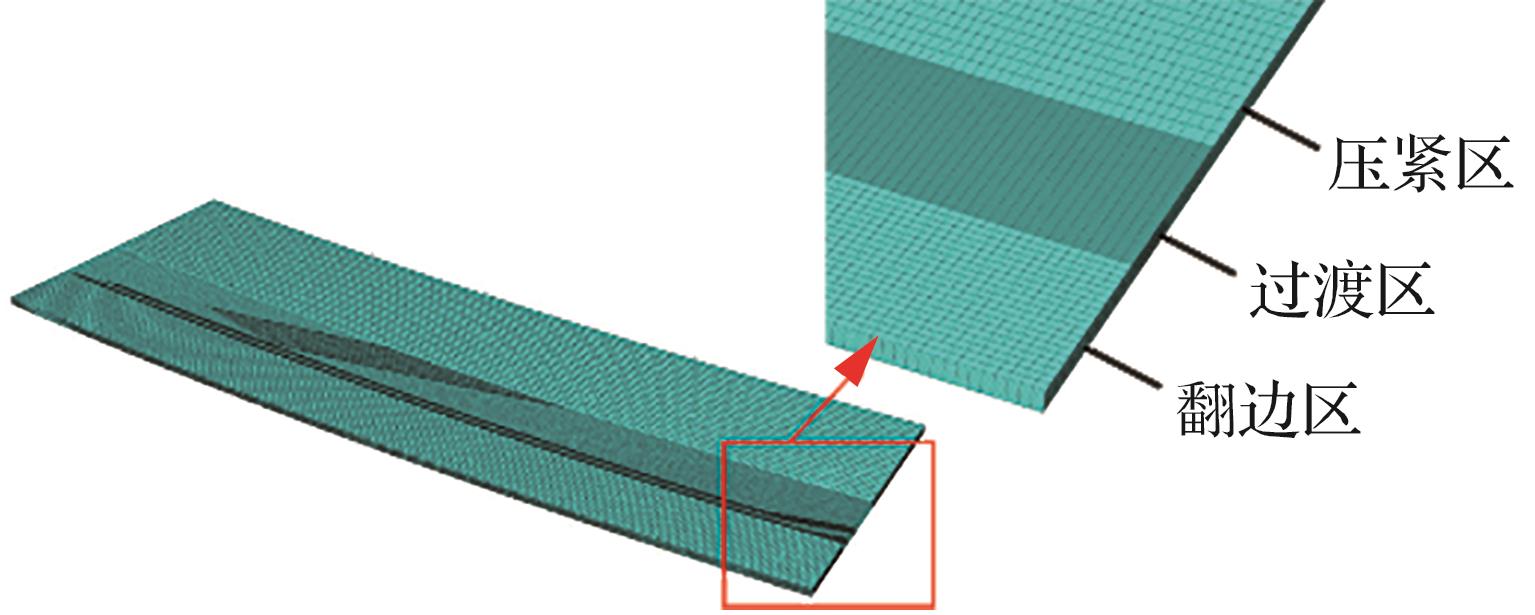
Table 1
Chemical composition of 5A06‑O sheet (wt%)
| 元素 | Al | Mg | Si | Mn | Zn | Cu | Fe |
|---|---|---|---|---|---|---|---|
| 含量 | 其余 | 5.8~8.8 | 0.4 | 0.5~0.8 | 0.2 | 0.1 | 0.4 |
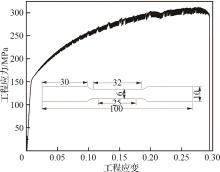
Fig. 7
Engineering stress-strain curve of 5A06-O aluminum alloy sheet


Fig. 8
True stress-strain curve of 5A06-O aluminum alloy sheet

Table 2
Basic mechanical properties of 5A06⁃O sheet
| 力学性能 | 数值 |
|---|---|
| 密度 ρ/(g·cm-3) | 2.64 |
| 泊松比 ν | 0.33 |
| 延伸率 δ/% | 27.36 |
| 杨氏模量 E/GPa | 70 |
| 屈服强度 σs/MPa | 158.8 |
| 强度系数 K/MPa | 127.73 |
| 应变硬化指数 n | 0.35 |
Fig. 9
Simulation results of characteristic flanging part flexible flanging forming
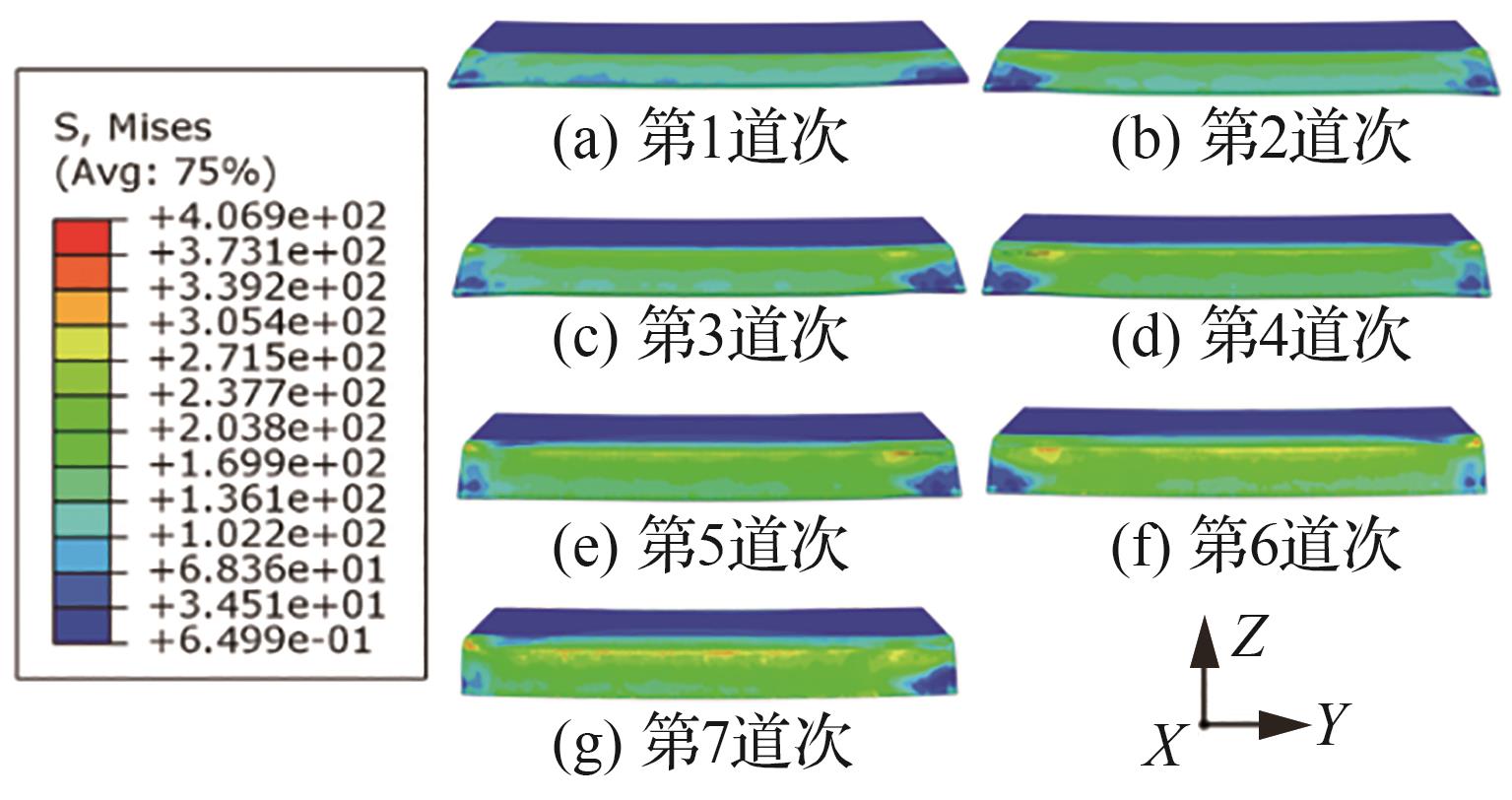
Fig. 10
Free end defects of flanging part after the final pass
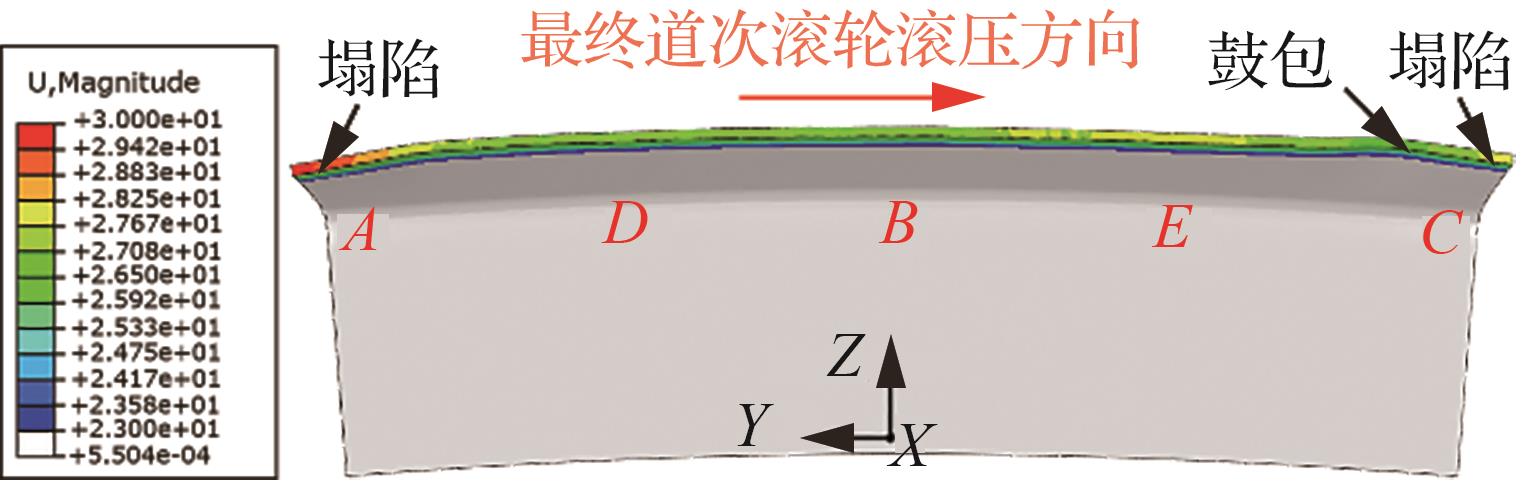
Fig. 11
Free end defects of flanging part after the sixth pass
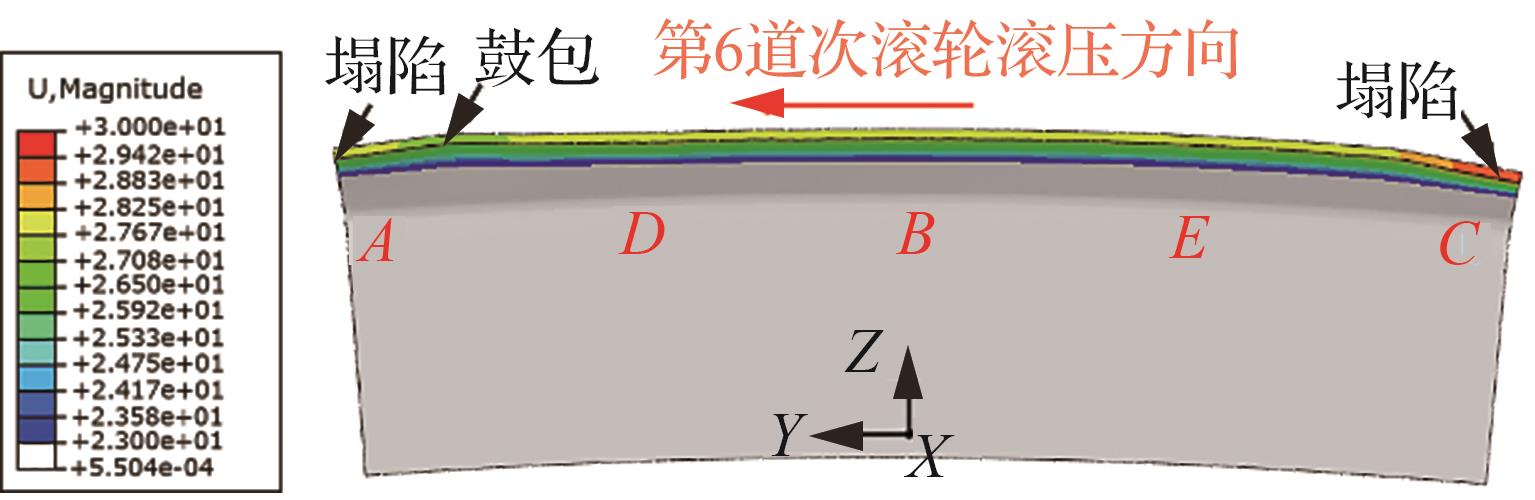

Fig. 12
Sheet metal forming during rolling-in process

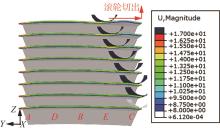
Fig. 13
Sheet metal forming during rolling-out process

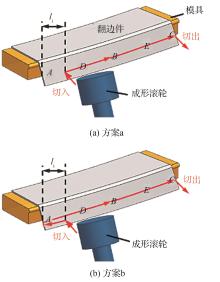
Fig. 14
Improvement schemes of rolling-in path
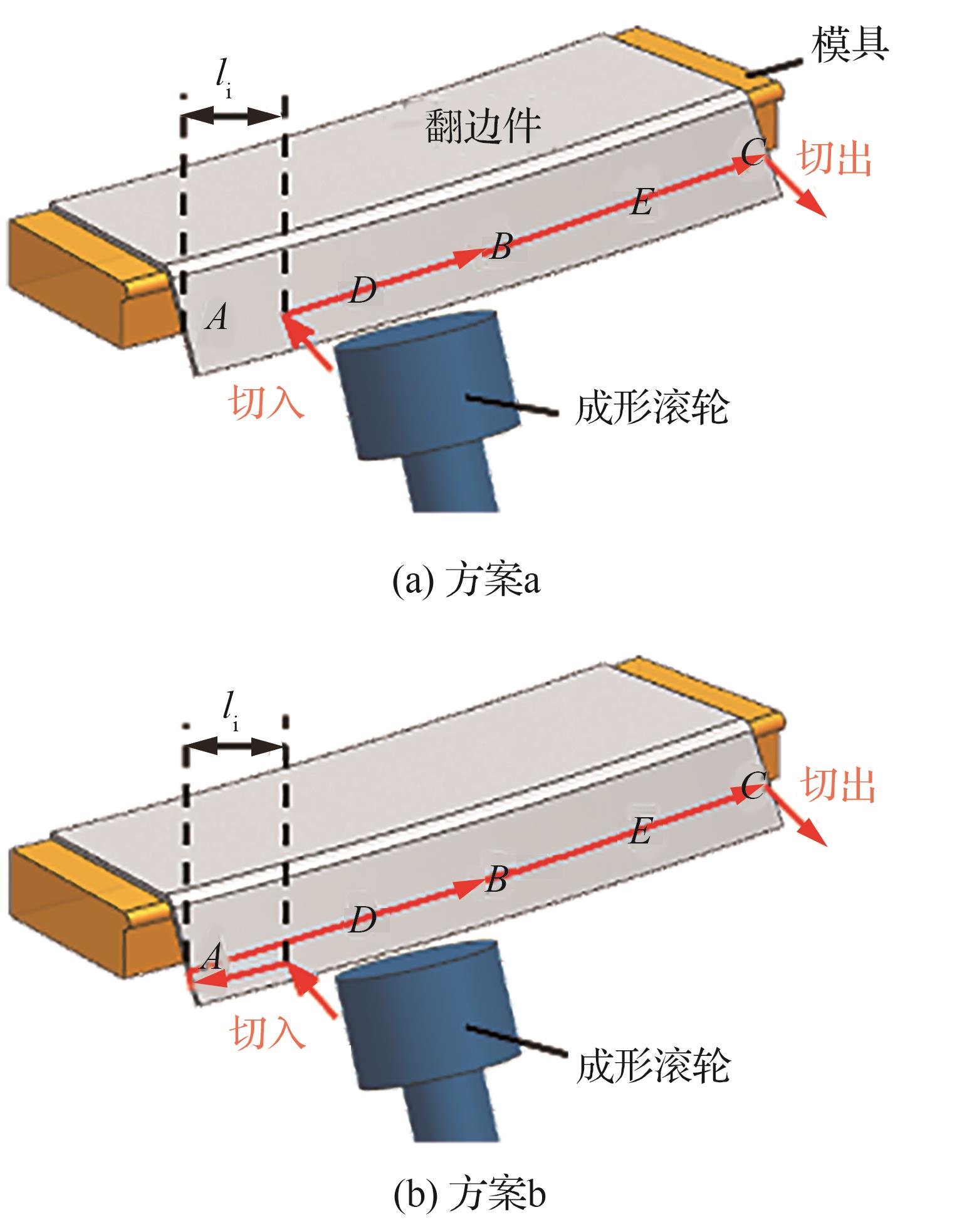

Fig. 15
Improvement schemes of rolling-out path

Table 3
Optimization of rolling-in paths
| 序 号 | 优化方案 | li/mm | lo/mm |
|---|---|---|---|
| 1 | a | 5 | 0 |
| 2 | a | 12.5 | 0 |
| 3 | a | 20 | 0 |
| 4 | a | 25 | 0 |
| 5 | a | 35 | 0 |
| 6 | a | 50 | 0 |
| 7 | b | 5 | 0 |
| 8 | b | 12.5 | 0 |
| 9 | b | 20 | 0 |
| 10 | b | 25 | 0 |
| 11 | b | 35 | 0 |
| 12 | b | 50 | 0 |
Table 4
Optimization of rolling-out paths
| 序 号 | 优化方案 | li/mm | lo/mm |
|---|---|---|---|
| 1 | a | 0 | 5 |
| 2 | a | 0 | 12.5 |
| 3 | a | 0 | 20 |
| 4 | a | 0 | 25 |
| 5 | a | 0 | 35 |
| 6 | a | 0 | 50 |
| 7 | b | 0 | 5 |
| 8 | b | 0 | 12.5 |
| 9 | b | 0 | 20 |
| 10 | b | 0 | 25 |
| 11 | b | 0 | 35 |
| 12 | b | 0 | 50 |

Fig. 16
Clearance in different roll-in schemes
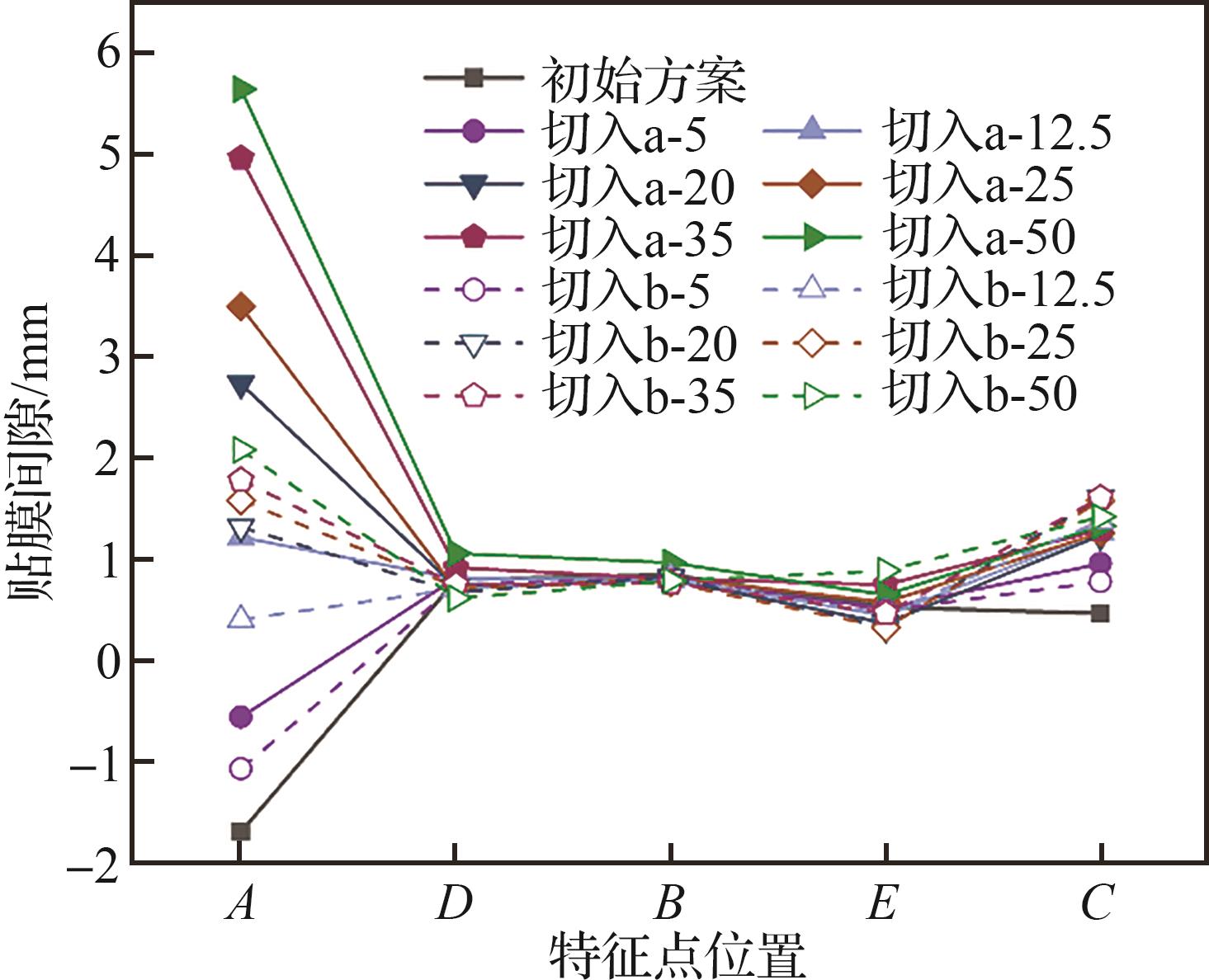

Fig. 17
Clearance in different roll-out schemes
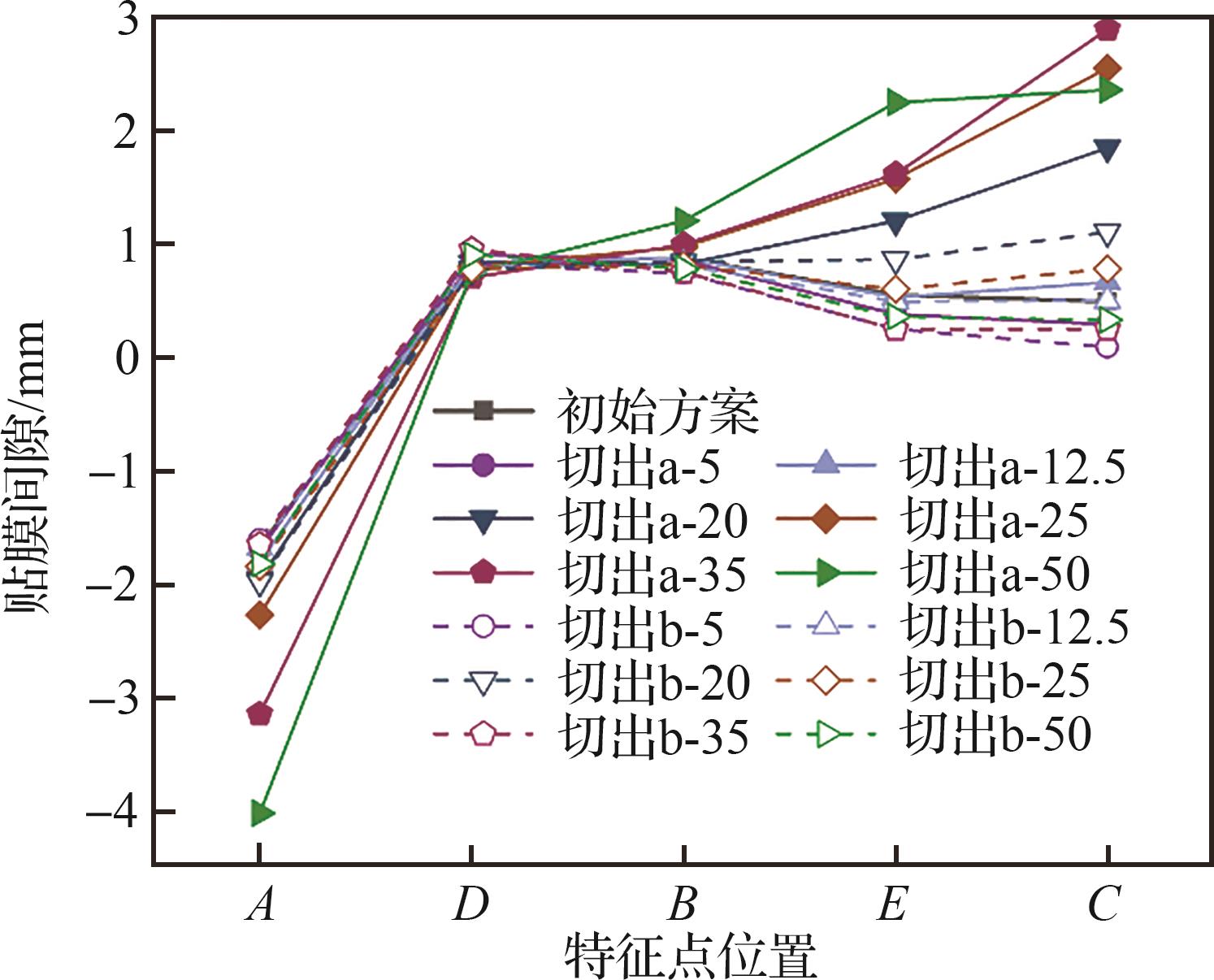

Fig. 18
Range of clearance in different optimized schemes
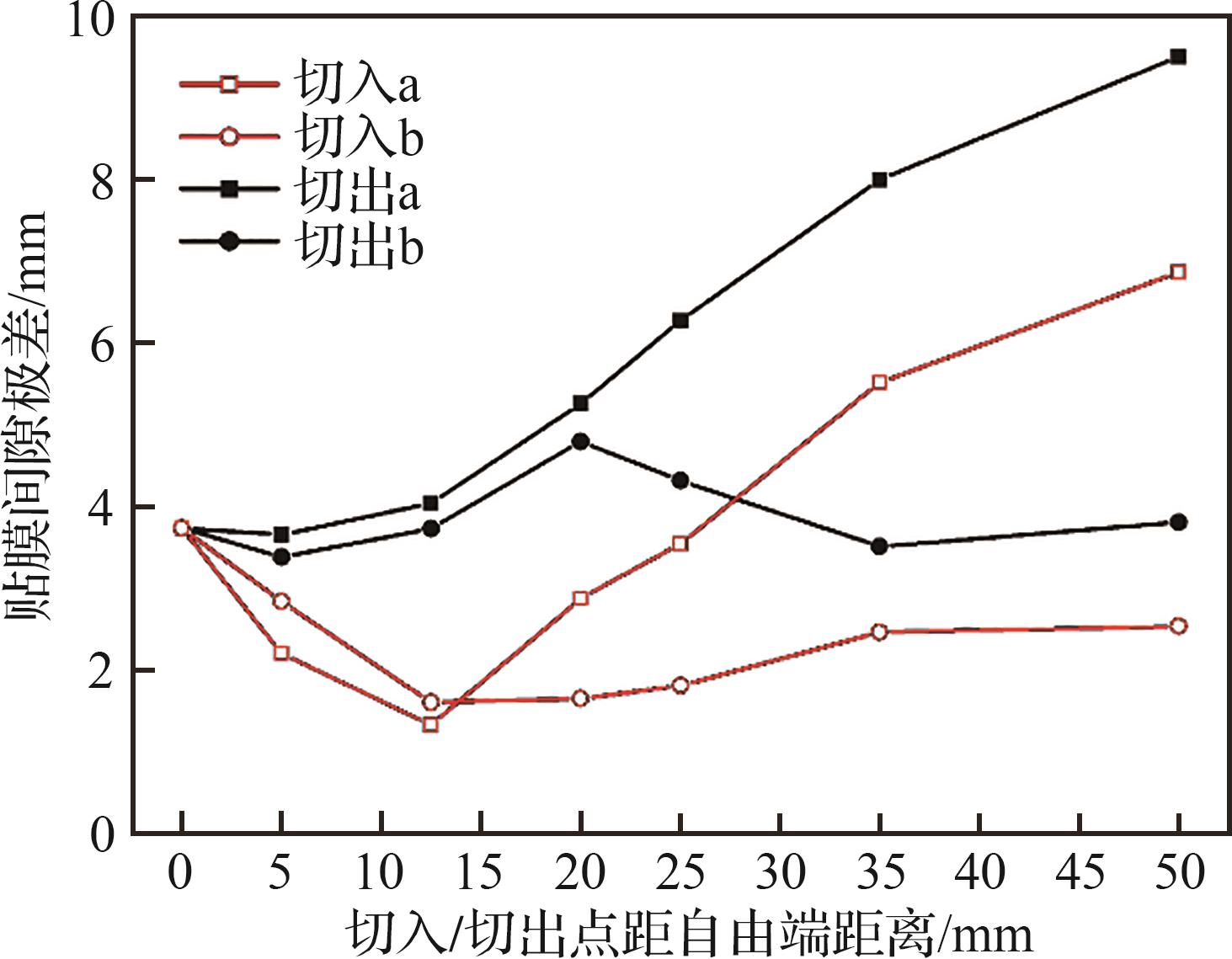
Fig. 19
Standard deviation of clearance in different optimized schemes

Fig. 20
Flanging angle in different roll-in schemes
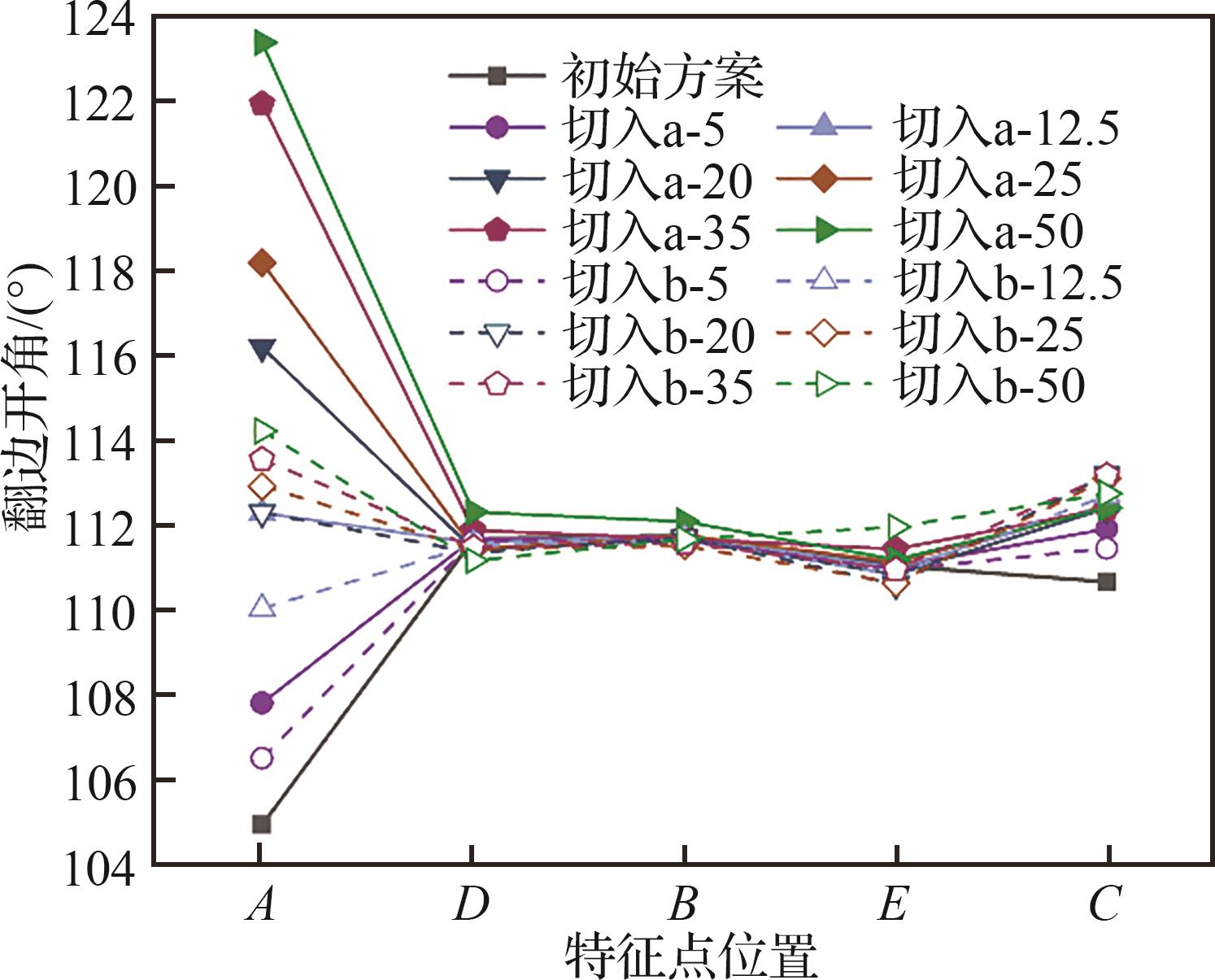

Fig. 21
Flanging angle in different roll-out schemes

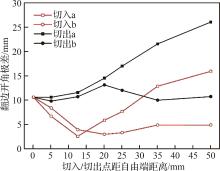
Fig. 22
Range of flanging angle in different optimized schemes
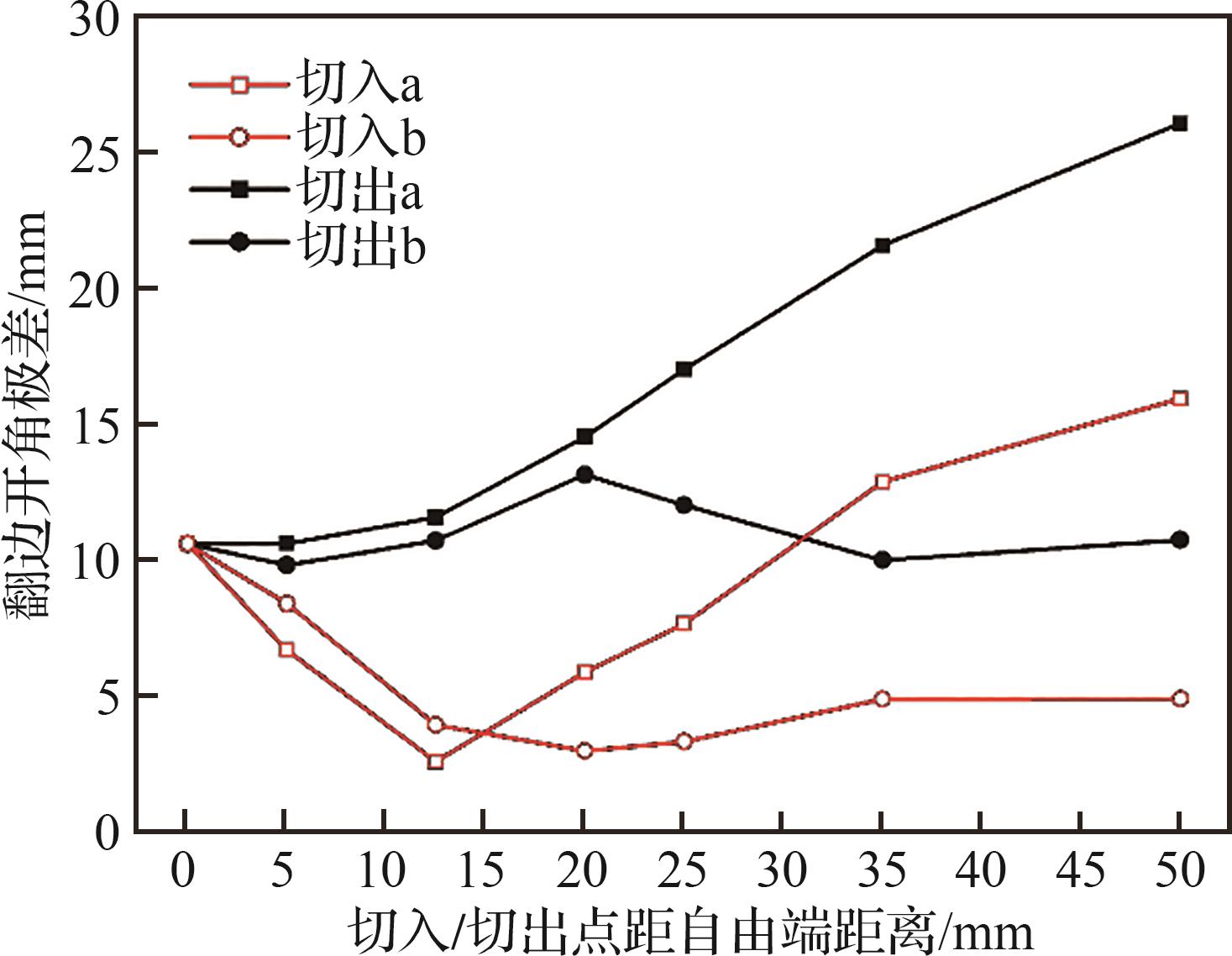

Fig. 23
Standard deviation of flanging angle in different optimized schemes

Fig. 24
Fillet radius in different roll-in schemes
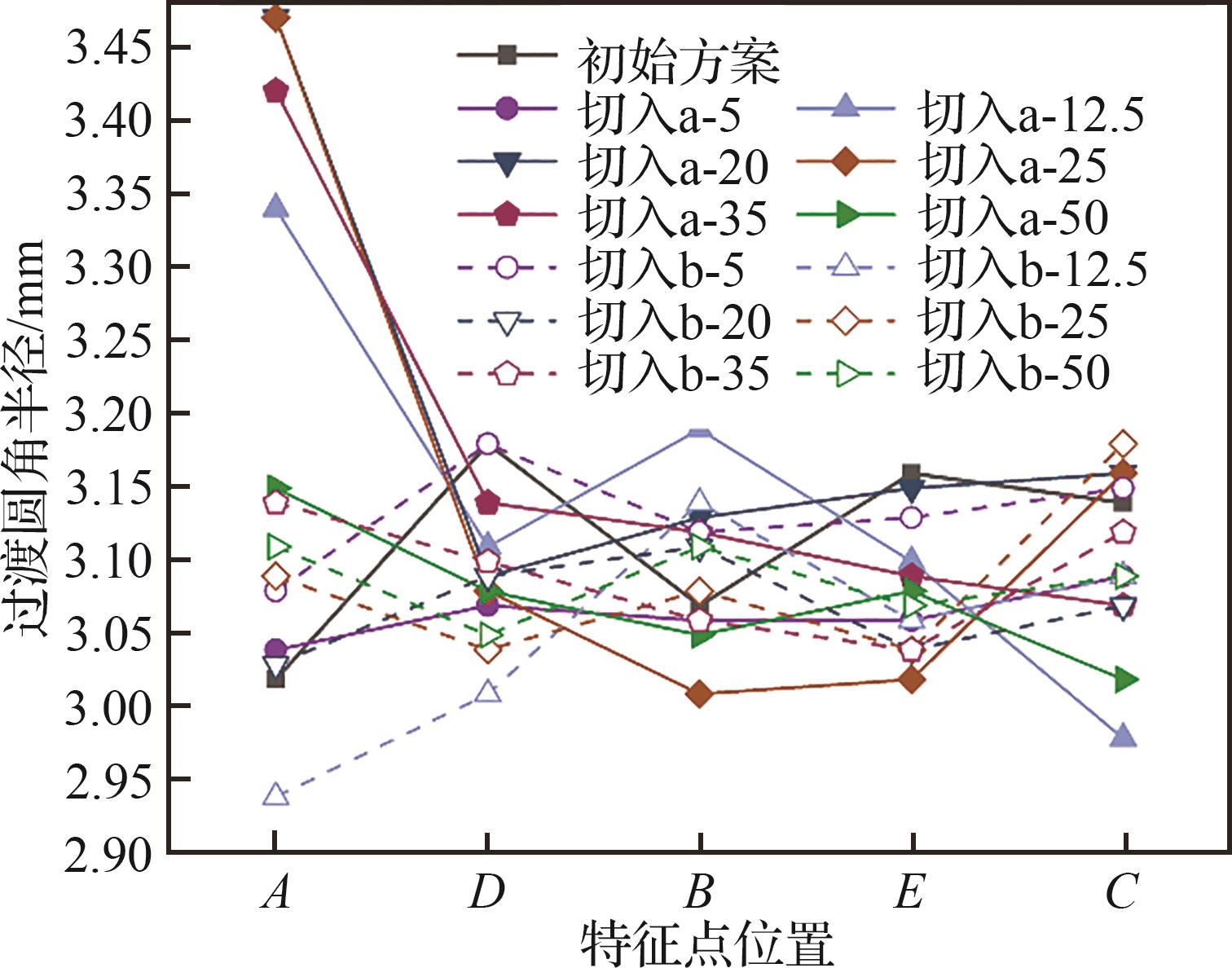

Fig. 25
Fillet radius in different roll-out schemes


Fig. 26
Range of fillet radius in different optimized schemes
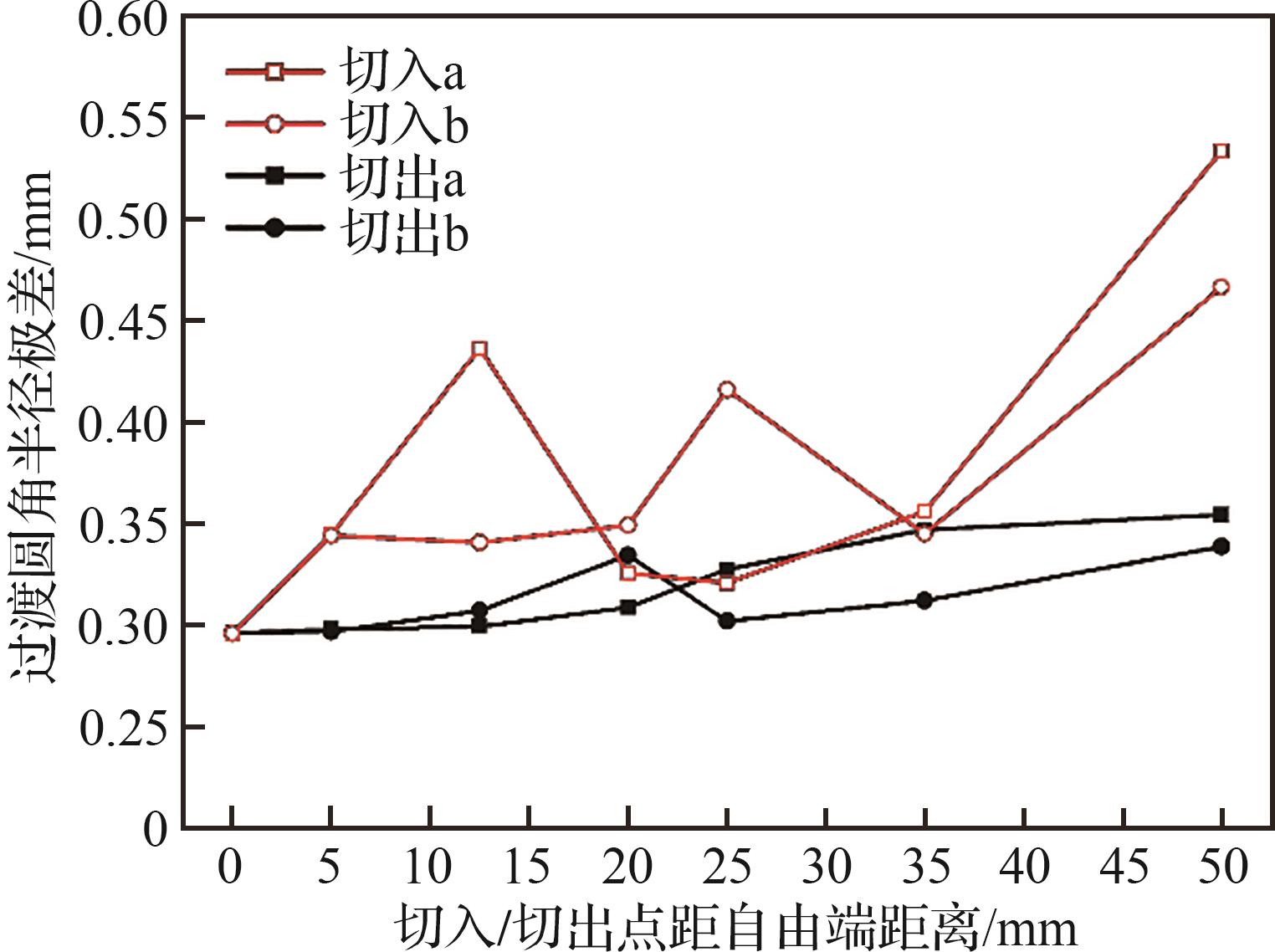
Fig. 27
Standard deviation of fillet radius in different optimized schemes
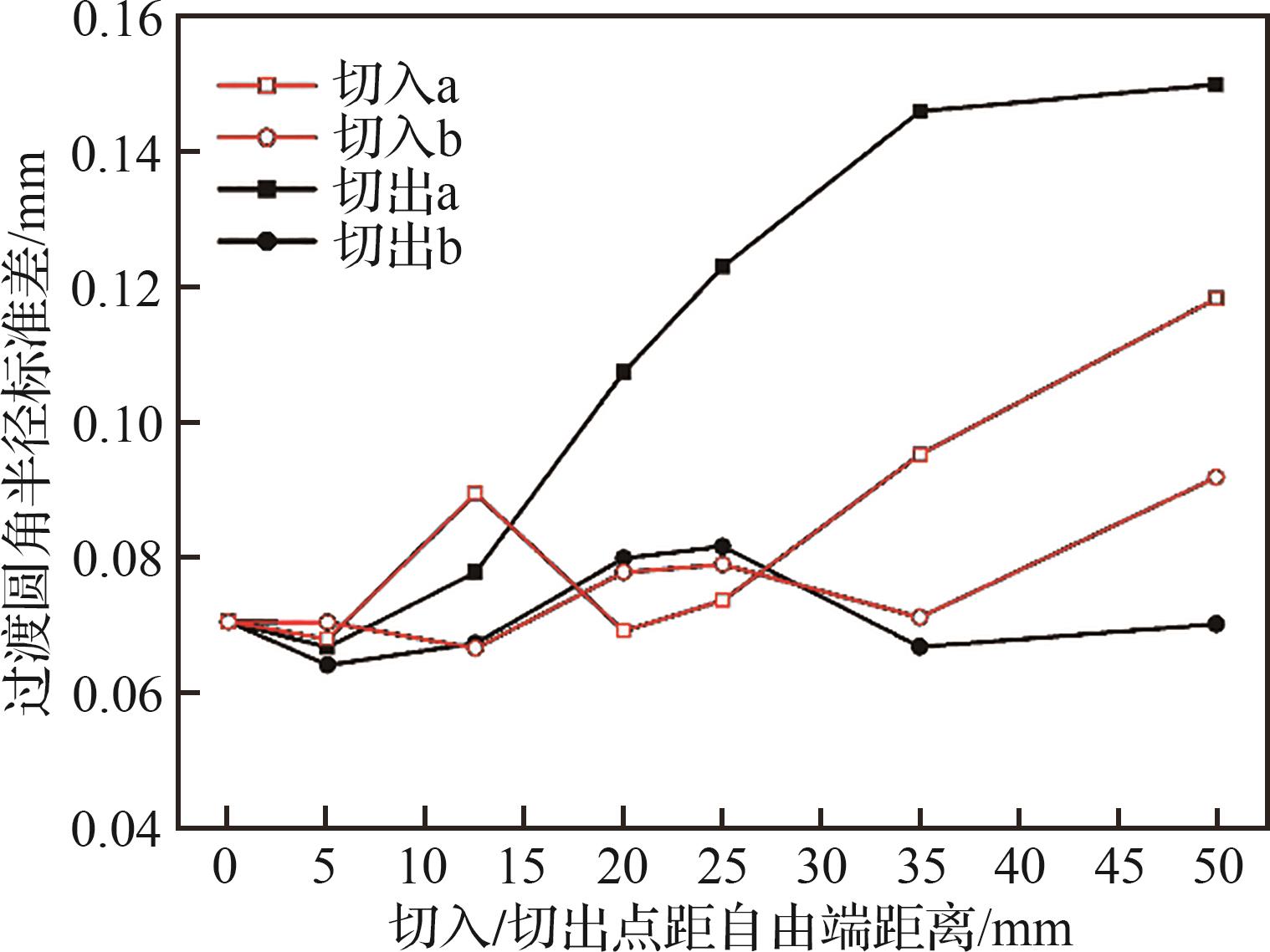

Fig. 28
Simulation results of original/optimized scheme


Fig. 29
Simulation results of clearance in original/optimized scheme


Fig. 30
Simulation results of flanging angle and fillet radius in original/optimized scheme


Fig. 31
Robot-assisted flexible flanging forming experimental system
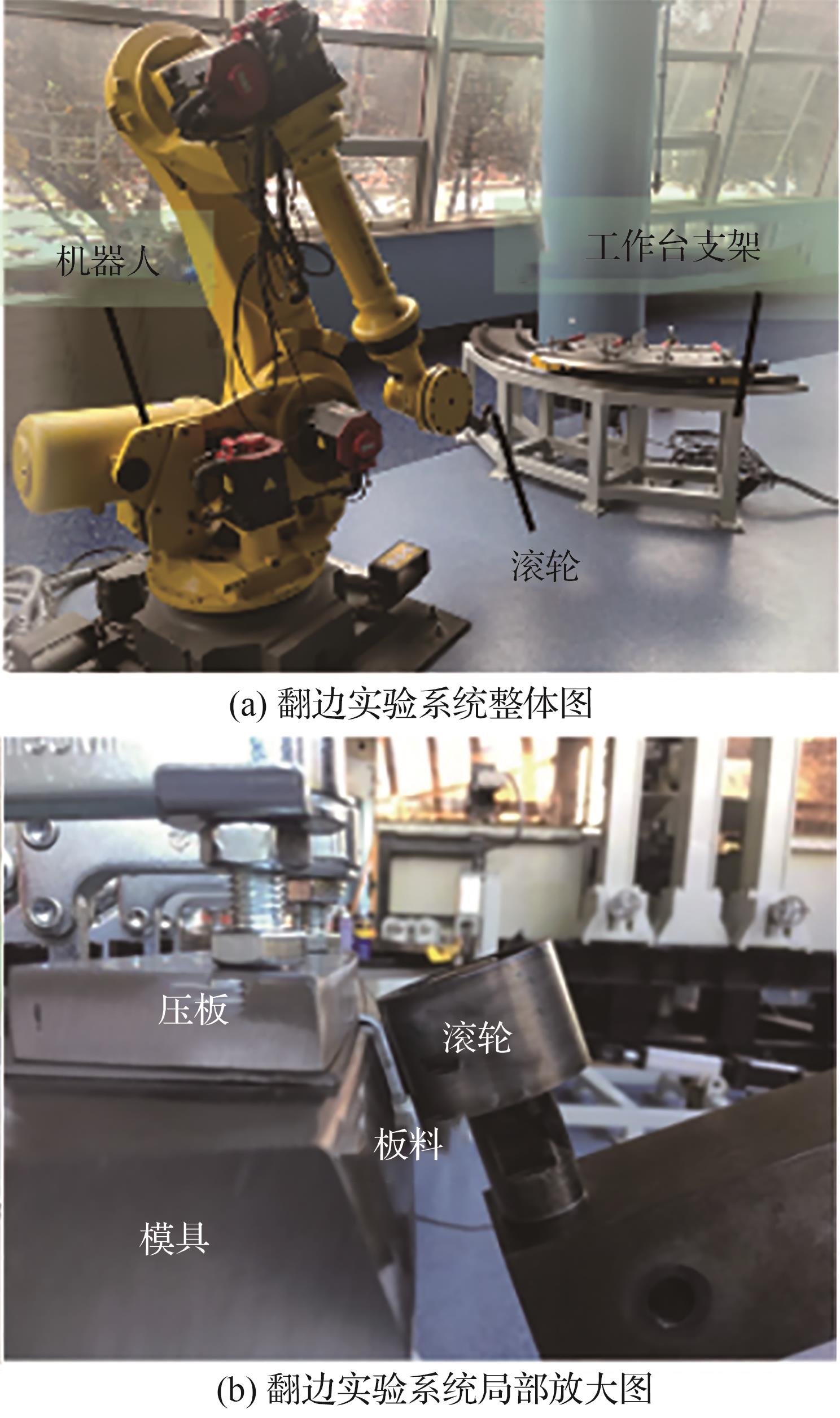

Fig. 32
Flanging part with optimization scheme
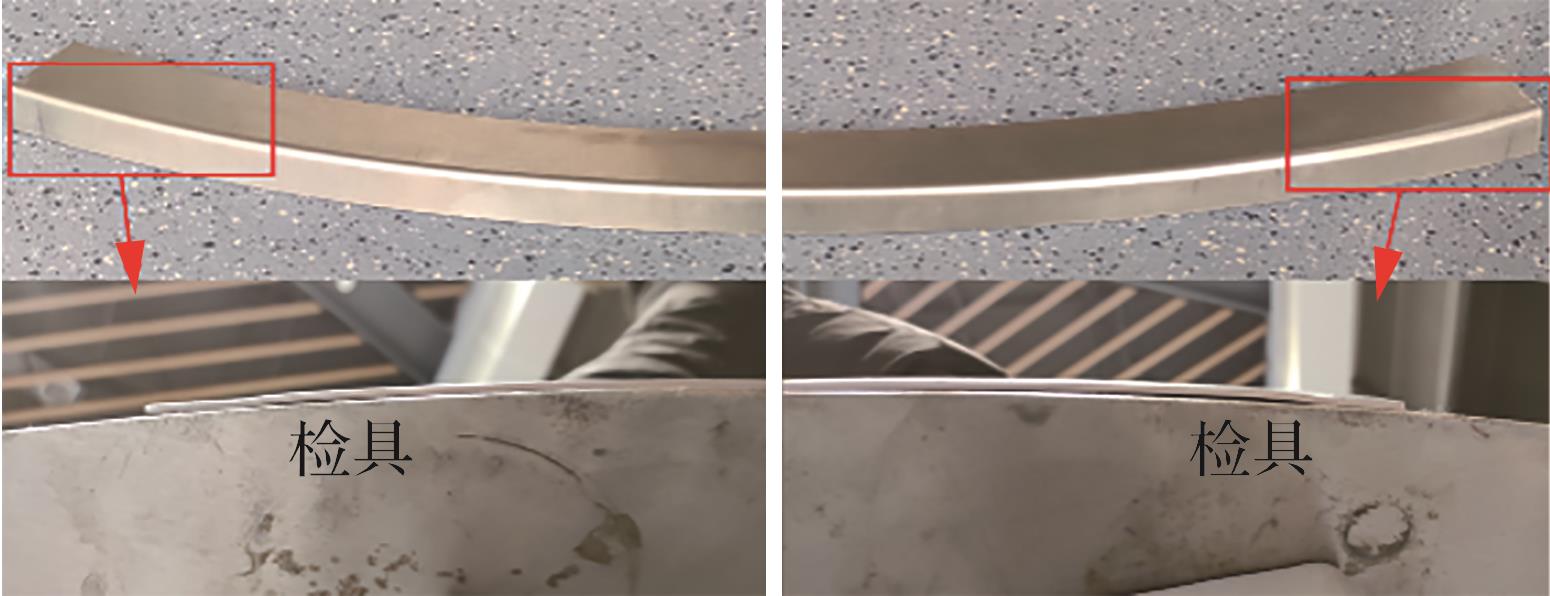
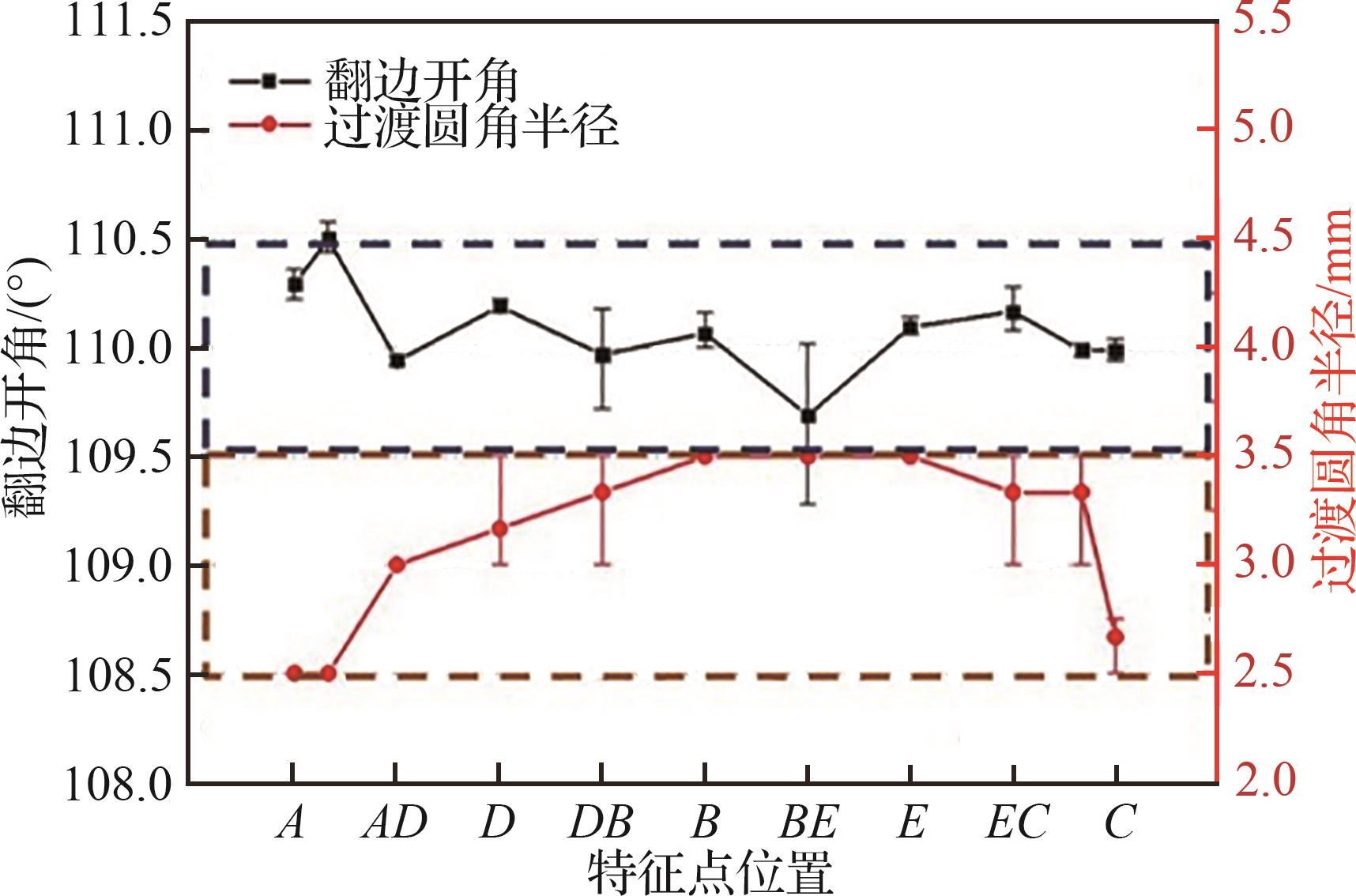
Fig. 33
Experimental results of flanging angle and fillet radius
| 1 | LÓPEZ J A, CENTENO G, MARTíNEZ A J, et al. Stretch-flanging of AA2024-T3 sheet by single-stage SPIF [J]. Thin-Walled Structures, 2021, 160: 107338. |
| 2 | CAO T, LU B, OU H, et al. Investigation on a new hole-flanging approach by incremental sheet forming through a featured tool [J]. International Journal of Machine Tools and Manufacture, 2016, 110: 1-17. |
| 3 | XU F, LIN Z Q, LI S H, et al. Study on the influences of geometrical parameters on the formability of stretch curved flanging by numerical simulation [J]. Journal of Materials Processing Technology, 2004, 145(1): 93-98. |
| 4 | HU P, LI D Y, LI Y X. Analytical models of stretch and shrink flanging [J]. International Journal of Machine Tools & Manufacture, 2003, 43(13): 1367-1373. |
| 5 | ZHANG G, YAO J, HU S J, et al. Shrink flanging with surface contours [J]. Journal of Manufacturing Processes, 2003, 5(2): 143-153. |
| 6 | LIVATYALI H, WU H C, ALTAN T. Prediction and elimination of springback in straight flanging using computer-aided design methods Part 2: FEM predictions and tool design [J]. Journal of Materials Processing Technology, 2002, 120(1-3): 348-354. |
| 7 | LIN H S, LEE C Y, WU C H. Hole flanging with cold extrusion on sheet metals by FE simulation [J]. International Journal of Machine Tools and Manufacture, 2007, 47(1): 168-174. |
| 8 | GOLOVASHCHENKO S F. Sharp flanging and flat hemming of aluminum exterior body panels [J]. Journal of Materials Engineering and Performance, 2005, 14(4): 508-515. |
| 9 | BURANATHITI T, CAO J. An effective analytical model for springback prediction in straight flanging processes [J]. International Journal of Materials & Product Technology, 2004, 21(1-3): 137-153. |
| 10 | 崔笑蕾, 詹梅, 高鹏飞, 等. 虑及板坯几何和性能波动的薄壁件塑性成形数值模拟研究进展 [J]. 航空学报, 2021, 42(10): 525145. |
| CUI X L, ZHAN M, GAO P F, et al. Advances in numerical simulation of plastic forming of thin walled components considering blank geometry and performance fluctuation [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(10): 525145 (in Chinese). | |
| 11 | GU Z, WANG G, YU G. Investigation on fracture of a 6014-T4 aluminum alloy sheet in the flanging and hemming process based on numerical and experimental methods [J]. Metals, 2020, 10(1): 1-14. |
| 12 | HAN K, LI X Q, PENG X Y, et al. Experimental and numerical study on the deformation mechanism of straight flanging by incremental sheet forming [J]. International Journal of Mechanical Sciences, 2019, 160: 75-89. |
| 13 | EFTHYMIADIS P, HAZRA S, CLOUGH A, et al. Revealing the mechanical and microstructural performance of multiphase steels during tensile, forming and flanging operations [J]. Materials Science and Engineering: A, 2017, 701: 174-186. |
| 14 | CHEN L, CHEN H Q, WANG Q Y, et al. Studies on wrinkling and control method in rubber forming using aluminium sheet shrink flanging process [J]. Materials & Design, 2015, 65: 505-510. |
| 15 | WEN T, ZHANG S, ZHENG J, et al. Bi-directional dieless incremental flanging of sheet metals using a bar tool with tapered shoulders [J]. Journal of Materials Processing Technology, 2016, 229: 795-803. |
| 16 | SU H, HUANG L, LI J, et al. Two-step electromagnetic forming: A new forming approach to local features of large-size sheet metal parts [J]. International Journal of Machine Tools and Manufacture, 2018, 124: 99-116. |
| 17 | RAJAK A K, KORE S D. Experimental investigation of aluminium–copper wire crimping with electromagnetic process: Its advantages over conventional process [J]. Journal of Manufacturing Processes, 2017, 26: 57-66. |
| 18 | YU H, ZHENG Q, WANG S, et al. The deformation mechanism of circular hole flanging by magnetic pulse forming [J]. Journal of Materials Processing Technology, 2018, 257: 54-64. |
| 19 | KUMAR S, AHMED M, PANTHI S K. Effect of punch profile on deformation behaviour of AA5052 sheet in stretch flanging process [J]. Archives of Civil and Mechanical Engineering, 2020, 20(18): 1-17. |
| 20 | 章绍昆, 毕庆贞, 王宇晗. 镜像铣削加工奇异区域刀具路径优化 [J]. 航空学报, 2021, 42(10): 524591. |
| ZHANG S K, BI Q Z, WANG Y H. Too path optimization for mirror milling in singular area [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(10): 524591 (in Chinese). | |
| 21 | 徐勇, 尹阔, 夏亮亮, 等 面向航空铝合金薄壁深腔构件的冲击液压成形工艺优化 [J]. 航空学报, 2021, 42(10): 524831. |
| XU Y, YIN K, XIA L L, et al. Optimization of impact hydroforming process for aeronautical components of aluminum alloy sheets with thin wall and deep cavity [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(10): 524831 (in Chinese). | |
| 22 | BORREGO M, MORALES-PALMA D, MARTINEZ-DONAIRE A J, et al. Experimental study of hole-flanging by single-stage incremental sheet forming [J]. Journal of Materials Processing Technology, 2016, 237: 320-330. |
| 23 | DEWANG Y, PANTHI S K, HORA M S. Binder force effect on stretch flange forming of aluminum alloy [J]. Materials and Manufacturing Processes, 2019, 34(13): 1516-1527. |
| 24 | DEWANG Y, HORA M S, PANTHI S K. Prediction of crack location and propagation in stretch flanging process of aluminum alloy AA-5052 sheet using FEM simulation [J]. Transactions of Nonferrous Metals Society of China, 2015, 25(7): 2308-2320. |
| 25 | LE PORT A, THUILLIER S, MANACH P Y. Characterization of surface defects after flanging of metallic sheets [J]. Journal of Materials Processing Technology, 2011, 211(12): 2062-2071. |
| 26 | HAMEDON Z, ABE Y, MORI K. Improvement of formability of high strength steel sheets in shrink flanging[C]∥IOP Conference Series: Materials Science and Engineering, 2016, 114(1): 012001. |
| 27 | 胡逸辉, 李杰, 赵亦希, 等. 机器人柔性翻边新工艺 [J]. 机械设计与研究, 2020, 36(3): 100-110. |
| HU Y H, LI J, ZHAO Y X, et al. New process for robot flexible flanging [J]. Machine Design and Research, 2020, 36(3): 100-110 (in Chinese). | |
| 28 | 尤舒曼, 李杰, 赵亦希, 等. 柔性翻边成形工艺参数研究 [J]. 上海交通大学学报, 2021, 55(10): 1246-1254. |
| YOU S M, LI J, ZHAO Y X, et al. Process parameters of flexible flanging [J]. Journal of Shanghai Jiaotong University, 2021, 55(10): 1246-1254 (in Chinese). |
| [1] | Chen ZHANG, Hao ZHANG. Lunar-gravity-assisted low-energy transfer from Earth into Distant Retrograde Orbit (DRO) [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 326507-326507. |
| [2] | JIANG Peng, GUO Dong, HAN Liang, LI Qingdong, REN Zhang. Trajectory optimization for cooperative reentry of multiple hypersonic glide vehicle [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723776-723776. |
| [3] | AN Ze, XIONG Fenfen, LIANG Zhuonan. Landing-phase guidance of rocket using bias proportional guidance and convex optimization [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(5): 323606-323606. |
| [4] | MA Dongli, ZHANG Liang, YANG Muqing, XIA Xinglu, WANG Shaoqi. Review of key technologies of ultra-long-endurance solar powered unmanned aerial vehicle [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(3): 623418-623418. |
| [5] | ZHANG Rouhe, FAN Yazhuo, SHE Zhiyong, CUI Naigang. TSTO vehicle first-stage return trajectory: Optimization and onboard generation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(11): 623856-623856. |
| [6] | WANG Jiawei, ZHANG Ran, HAO Zeming, LI Huifeng. Real-time trajectory optimization for hypersonic vehicles with Proximal-Newton-Kantorovich convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(11): 624051-624051. |
| [7] | TIAN Bailing, LI Zhiyu, WU Siyuan, ZONG Qun. Reentry trajectory optimization, guidance and control methods for reusable launch vehicles: Review [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(11): 624072-624072. |
| [8] | YONG Enmi, LIU Shenshen, CHENG Yanqing, QIAN Weiqi. Mode stability analysis of hypersonic reentry vehicle for trajectory optimization [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(7): 122666-122666. |
| [9] | ZHANG Liming, XING Jianjun, CHEN Ziang, WANG Yi, YU Yang. Effect of Dryden atmospheric turbulence on minimum-energy trajectory of stratospheric airships [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(1): 120180-120180. |
| [10] | DU Xin, LI Haiyang, SHEN Hongxin. Skip Reentry Trajectory Optimization Based on Analysis of Path Constraints [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2014, 35(5): 1265-1275. |
| [11] | RUAN Jian'gang, HE Guoqiang, LYU Xiang. Trajectory Optimization Method in Two-stage-to-orbit RBCC-RKT Launch Vehicle [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2014, 35(5): 1284-1291. |
| [12] | YAN Liang, LI Yuan, ZHAO Jiguang, DU Xiaoping. Trajectory Real-time Optimization Based on Variable Node Inverse Dynamics in the Virtual Domain [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2013, 34(12): 2794-2803. |
| [13] | MENG Wanli, CHEN Renliang. Trajectory Optimization of Helicopter Autorotation Landing After One Engine Failure [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2011, 32(9): 1599-1607. |
| [14] | Shang Haibin;Cui Pingyuan;Qiao Dong. Analytical Gradient-based Optimization Method for Low-thrust Transfer Trajectories [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(12): 2365-2372. |
| [15] | Yong Enmi;Chen Lei;Tang Guojin. Trajectory Optimization of Hypersonic Gliding Reentry Vehicle Based on the Physical Programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2008, 29(5): 1091-1097. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341