| [1] |
PETERSON B R, JOHNSON G, STEVENS J. Feasible architectures for joint precision approach and landing system (JPALS) for land and sea[C]∥Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation. Long Beach: ION GNSS, 2004: 544-554.
|
| [2] |
李强, 张淑丽, 蒙文巩. 国外舰载无人机着舰引导技术发展现状[J]. 无人系统技术, 2018, 1(2): 43-48.
|
|
LI Q, ZHANG S L, MENG W G. Surveys of carrier landing techniques for UAVs[J]. Unmanned Systems Technology, 2018, 1(2): 43-48 (in Chinese).
|
| [3] |
SHCHERBININ V V, KVETKIN G A, SVIYAZOV A V, et al. Navigation support of the UAV automated landing system[J]. Gyroscopy and Navigation, 2013, 4(2): 104-114.
|
| [4] |
HUANG C J, JAN S S. UAV shipboard landing with RTK[J]. GPS World, 2014, 5(25):34-42.
|
| [5] |
GUNNAM K, HUGHES D C, JUNKINS J L, et al. A DSP embedded optical navigation system[C]∥6th International Conference on Signal Processing, 2002. Piscataway: IEEE Press, 2002: 1735-1739.
|
| [6] |
ANITHA G, GIREESH KUMAR R N. Vision based autonomous landing of an unmanned aerial vehicle[J]. Procedia Engineering, 2012, 38: 2250-2256.
|
| [7] |
SANCHEZ-LOPEZ J L, PESTANA J, SARIPALLI S, et al. An approach toward visual autonomous ship board landing of a VTOL UAV[J]. Journal of Intelligent & Robotic Systems, 2014, 74(1): 113-127.
|
| [8] |
Corporation S A. Lidar-based shipboard tracking and state estimation for autonomous landing: 20160009410[P]. 2016-01-14.
|
| [9] |
刘基余. GPS卫星导航定位原理与方法[M]. 北京: 科学出版社, 2003: 334-363.
|
|
LIU J Y. Principles and methods of GPS satellite navigation and positioning[M]. Beijing: Science Press, 2003: 334-363 (in Chinese).
|
| [10] |
周煜, 伍逸夫, 赵峰. 航母着舰引导系统概述[J]. 舰船电子工程, 2011, 31(11): 22-24, 36.
|
|
ZHOU Y, WU Y F, ZHAO F. An overview of aircraft carrier landing guidance systems[J]. Ship Electronic Engineering, 2011, 31(11): 22-24, 36 (in Chinese).
|
| [11] |
LÖBL D, HOLZAPFEL F. Simulation analysis of a sensor data fusion for close formation flight[C]∥AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2014.
|
| [12] |
TANG D Q, JIAO Y K, CHEN J. On Automatic Landing System for carrier plane based on integration of INS, GPS and vision[C]∥2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC). Piscataway: IEEE Press, 2016: 2260-2264.
|
| [13] |
唐大全, 毕波, 王旭尚, 等. 自主着陆/着舰技术综述[J]. 中国惯性技术学报, 2010, 18(5): 550-555.
|
|
TANG D Q, BI B, WANG X S, et al. Summary on technology of automatic landing/carrier landing[J]. Journal of Chinese Inertial Technology, 2010, 18(5): 550-555 (in Chinese).
|
| [14] |
LARRY D A. Using radar derived location data in a GPS landing system:US9975648B2[P]. 2018-05-22.
|
| [15] |
YANG X L, MEJIAS L, GARRATT M. Multi-sensor data fusion for UAV navigation during landing operations[C]∥Proceedings of the 2011 Australian Conference on Robotics and Automation. New York: Curran Associates, Inc., 2011:1-10.
|
| [16] |
LIGGINS M E, CHONG C Y, KADAR I, et al. Distributed fusion architectures and algorithms for target tracking[J]. Proceedings of the IEEE, 1997, 85(1): 95-107.
|
| [17] |
沈晓静. 多传感器分布式检测和估计融合[J]. 中国科学: 数学, 2014, 44(2): 105-116.
|
|
SHEN X J. Multi-sensor distributed detection and estimation fusion[J]. Scientia Sinica (Mathematica), 2014, 44(2): 105-116 (in Chinese).
|
| [18] |
张康皓, 董希旺, 于江龙, 等. 多传感器融合状态估计方法综述[J]. 导航定位与授时, 2022, 9(5): 28-37.
|
|
ZHANG K H, DONG X W, YU J L, et al. A survey of multisensor data fusion state estimation methods[J]. Navigation Positioning and Timing, 2022, 9(5): 28-37 (in Chinese).
|
| [19] |
周峰, 梁禄扬, 林平. 协方差交叉融合的惯性/卫星/雷达组合导航研究[J]. 航天控制, 2021, 39(4): 22-27.
|
|
ZHOU F, LIANG L Y, LIN P. Research on INS/GNSS/RADAR integrated navigation with covariance intersection fusion[J]. Aerospace Control, 2021, 39(4): 22-27 (in Chinese).
|
| [20] |
HALL D, LLINAS J. Multisensor data fusion[M]. Boca Raton: CRC Press, 2001: 23-32.
|
| [21] |
CHEN L J, ARAMBEL P O, MEHRA R K. Estimation under unknown correlation: Covariance intersection revisited[J]. IEEE Transactions on Automatic Control, 2002, 47(11): 1879-1882.
|
| [22] |
REINHARDT M, NOACK B, ARAMBEL P O, et al. Minimum covariance bounds for the fusion under unknown correlations[J]. IEEE Signal Processing Letters, 22(9): 1210-1214.
|
| [23] |
韩崇昭, 朱洪艳, 段战胜. 多源信息融合[M]. 3版. 北京: 清华大学出版社, 2022: 306-309.
|
|
HAN C Z, ZHU H Y, DUAN Z S. Multisource information fusion[M]. 3rd ed. Beijing: Tsinghua University Press, 2022: 306-309 (in Chinese).
|
| [24] |
CHANG K C, SAHA R K, BAR-SHALOM Y. On optimal track-to-track fusion[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(4): 1271-1276.
|
| [25] |
LI X R, ZHU Y M, WANG J, et al. Optimal linear estimation fusion.I. Unified fusion rules[J]. IEEE Transactions on Information Theory, 2003, 49(9): 2192-2208.
|
| [26] |
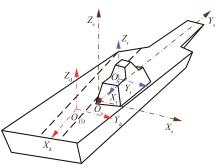
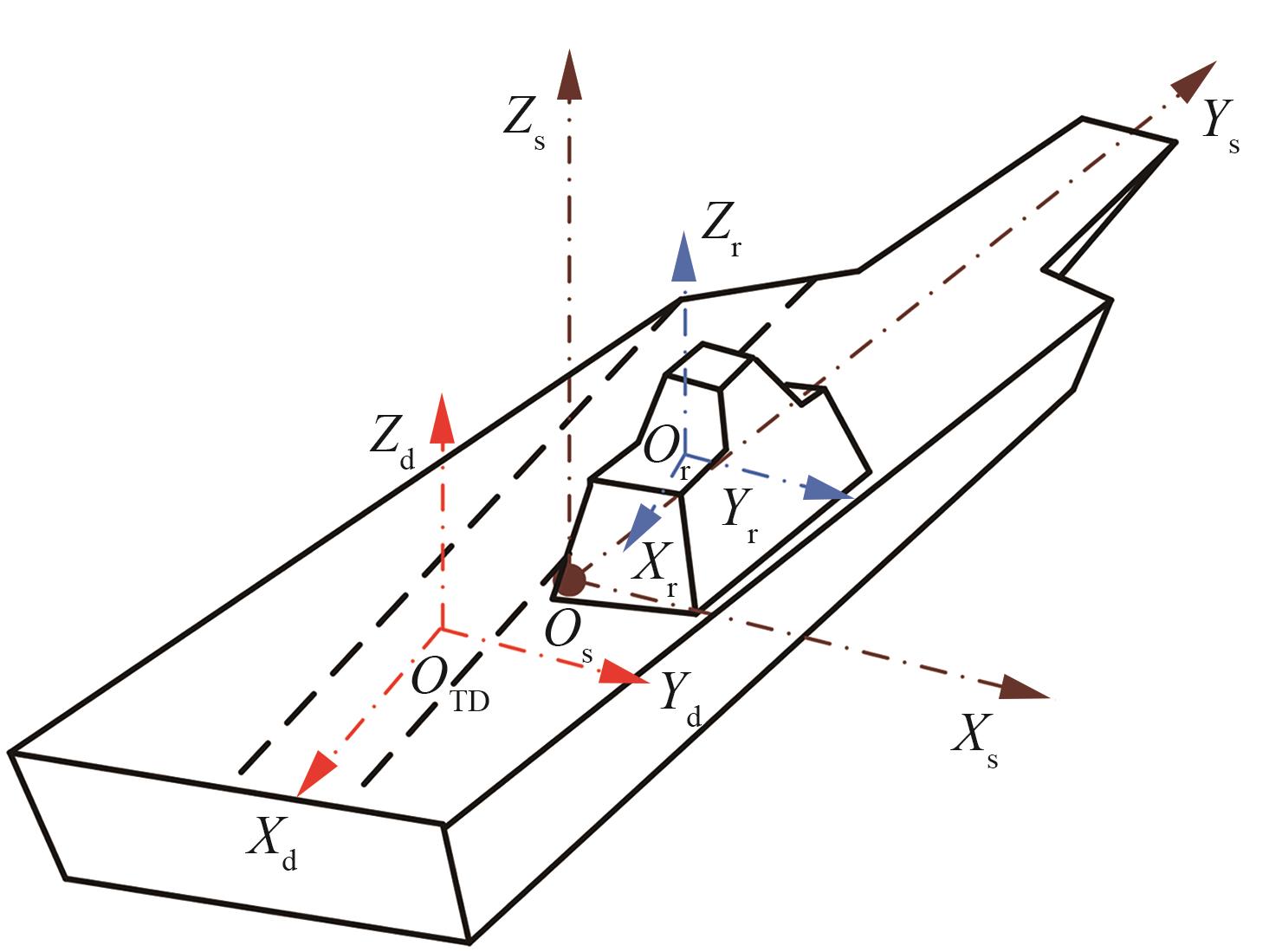
张志远, 罗国富. 舰船姿态坐标变换及稳定补偿分析[J]. 舰船科学技术, 2009, 31(4): 34-40.
|
|
ZHANG Z Y, LUO G F. Coordinate transformation of warship pose and analysis of stabilization compensation[J]. Ship Science and Technology, 2009, 31(4): 34-40 (in Chinese).
|
 ), 张超1, 苏婧婷2
), 张超1, 苏婧婷2