| [1] |
王国庆, 熊焕, 侯俊杰. 数字时代的航天系统工程[J]. 机械工程学报, 2024, 60(14): 206-214.
|
|
WANG G Q, XIONG H, HOU J J. China aerospace systems engineering method in the digital age[J]. Journal of Mechanical Engineering, 2024, 60(14): 206-214 (in Chinese).
|
| [2] |
LONG J, HUANG C Y. Obligations and liabilities concerning the active removal of foreign space debris: A global governance perspective[J]. Acta Astronautica, 2024, 222: 422-435.
|
| [3] |
PANG B J, WANG D F, XIAO W K, et al. Space debris cumulative flux considering the interval distance-based method[J]. Advances in Space Research, 2021, 67(8): 2274-2281.
|
| [4] |
许英杰, 刘晓路, 贺仁杰, 等. 空间碎片主动移除任务规划研究综述[J]. 控制与决策, 2024, 39(2): 371-380.
|
|
XU Y J, LIU X L, HE R J, et al. Space debris active removal mission planning: A review[J]. Control and Decision, 2024, 39(2): 371-380 (in Chinese).
|
| [5] |
VIMALESH M, PHILIPPE W, CHRISTINE C. Design considerations and workspace computation of 2-X and 2-R planar cable-driven tensegrity-inspired manipulators[J]. Mechanism and Machine Theory, 2024, 195: 105610.
|
| [6] |
XU K, ZHUANG X H, QIAO A W, et al. Design and analysis of a novel deployable grasping manipulator for space object capture[J]. Acta Astronautica, 2024, 224: 266-280.
|
| [7] |
ZHANG Y, KANG X, LI B. A family of folding single-loop metamorphic mechanisms for aerospace manipulators: Synthesis, network, and analysis[J]. Mechanism and Machine Theory, 2024, 201: 105728.
|
| [8] |
ZHAO C, GUO H W, LIU R Q, et al. Actuation distribution and workspace analysis of a novel 3(3RRIS) metamorphic serial-parallel manipulator for grasping space non-cooperative targets[J]. Mechanism and Machine Theory, 2019, 139: 424-442.
|
| [9] |
LI G T, XU P, QIAO S L, et al. Stability analysis and optimal enveloping grasp planning of a deployable robotic hand[J]. Mechanism and Machine Theory, 2021, 158: 104241.
|
| [10] |
韩博, 杨名, 骆明炎, 等. 单驱动空间可展开变胞捕获机械手设计与分析[J]. 机械工程学报, 2024, 61(1): 30-43.
|
|
HAN B, YANG M, LUO M Y, et al. Design and analysis of a single-drive space deployable metamorphic capture manipulator[J]. Journal of Mechanical Engineering, 2024, 61(1): 30-43 (in Chinese).
|
| [11] |
QIAO S L, GUO H W, LIU R Q, et al. Self-adaptive grasp process and equilibrium configuration analysis of a 3-DOF UACT robotic finger[J]. Mechanism and Machine Theory, 2019, 133: 250-266.
|
| [12] |
ZHANG B T, SUN J L, HU H Y. Deployment dynamics and experiments of a tendon-actuated flexible manipulator[J]. Chinese Journal of Aeronautics, 2024, 38(2): 103008.
|
| [13] |
戴建生, 安伟, 王瑞钦, 等. 基于可重构虎克铰链副的仿人变胞手设计与分析[J]. 天津大学学报, 2022, 55(3): 221-229.
|
|
DAI J S, AN W, WANG R Q, et al. Design and analysis of a humanoid metamorphic hand based on reconfigurable Hooke joints[J]. Journal of Tianjin University, 2022, 55(3): 221-229 (in Chinese).
|
| [14] |
龙奕琳, 王彬峦, 金弘哲, 等. 基于差动轮系的变刚度执行器及变刚度柔性手爪[J]. 机械工程学报, 2023, 59(1): 91-102.
|
|
LONG Y L, WANG B L, JIN H Z, et al. Variable stiffness actuator and variable stiffness flexible gripper based on differential gear train[J]. Journal of Mechanical Engineering, 2023, 59(1): 91-102 (in Chinese).
|
| [15] |
WANG G, ZHANG Q H, HU X . et al. Capture dynamics and driving method of origami capture mechanism in orbit[J]. Thin-Walled Structures, 2024, 201: 112019.
|
| [16] |
WANG S, YAN P, HUANG H L, et al. Inflatable metamorphic origami[J]. Research, 2023, 6: 0133.
|
| [17] |
杨慧, 汪祥, 乔尚岭, 等. Kresling和Miura折痕混合型三指机械手的运动学分析及其设计[J]. 机器人, 2022, 44(1): 35-44.
|
|
YANG H, WANG X, QIAO S L, et al. Design and kinematics analysis of a three-finger manipulator with Kresling and Miura hybrid origami crease[J]. Robot, 2022, 44(1): 35-44 (in Chinese).
|
| [18] |
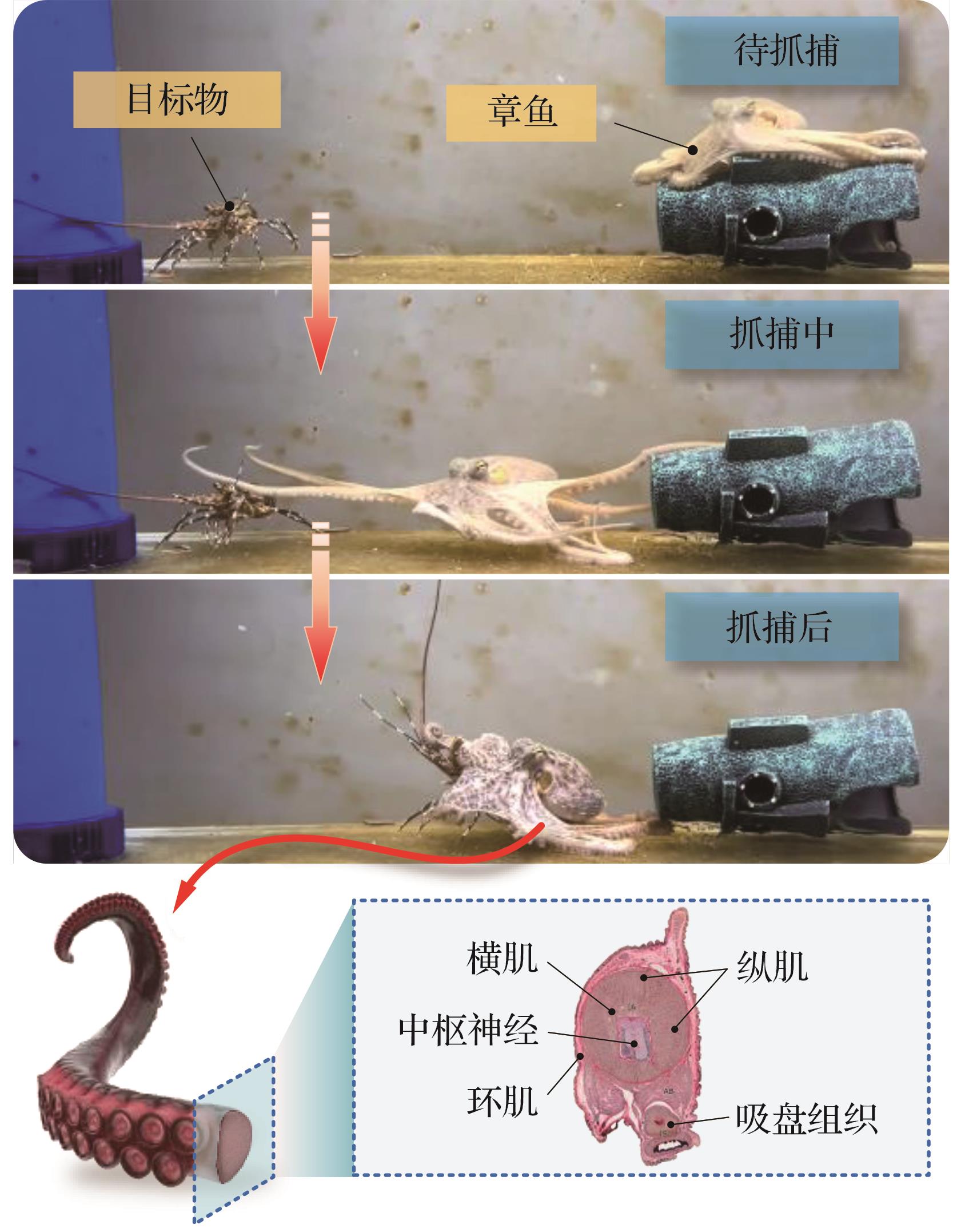
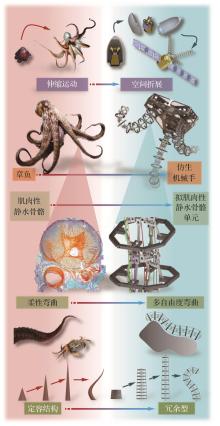
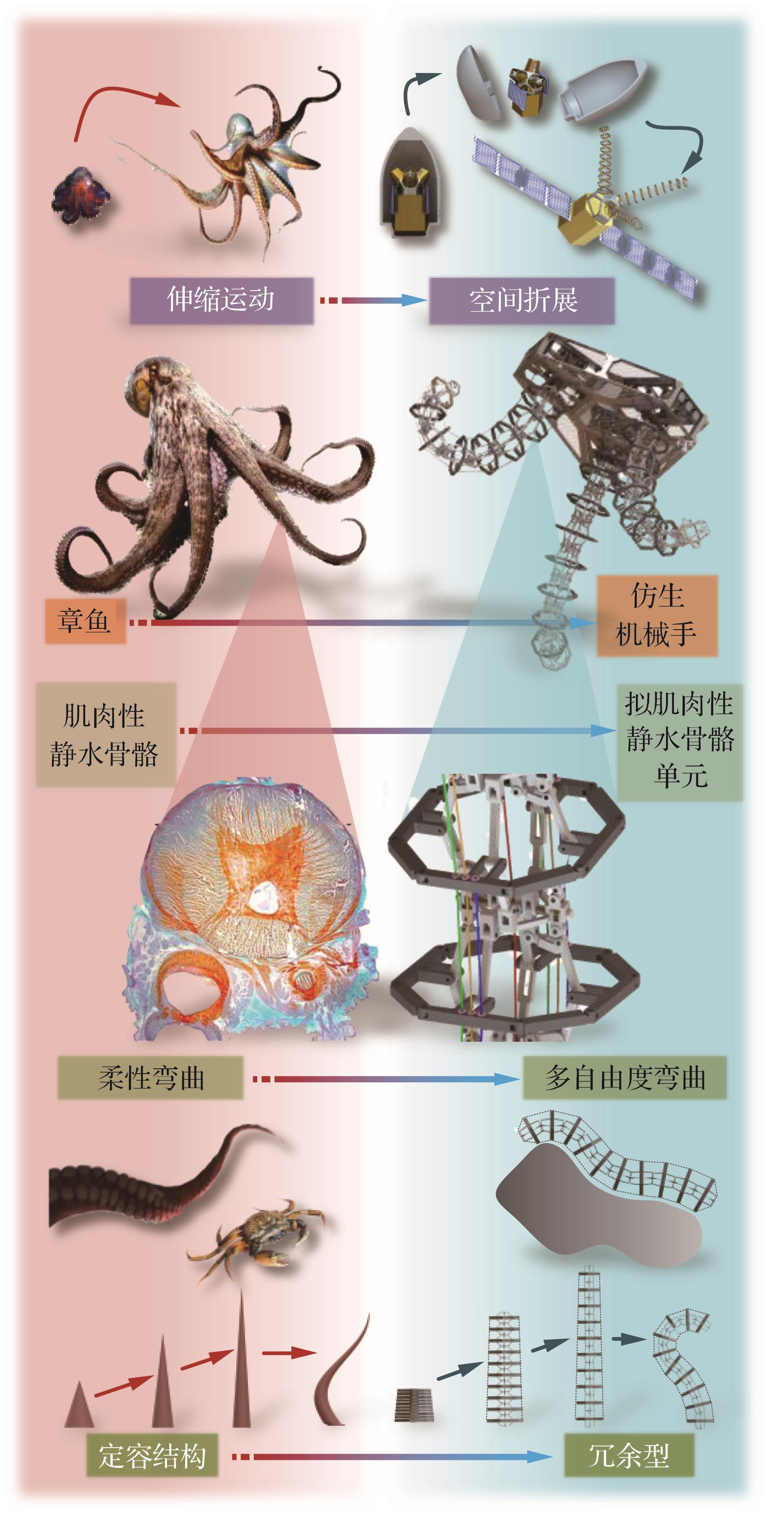
MARGHERI L, LASCHI C, MAZZOLAI B. Soft robotic arm inspired by the octopus: I. From biological functions to artificial requirements[J]. Bioinspiration & Biomimetics, 2012, 7(2): 1-12.
|
| [19] |
MATSUDA R, MAVINKURVE U, KANADA A, et al. A woodpecker’s tongue-inspired, bendable and extendable robot manipulator with structural stiffness[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 3334-3341.
|
| [20] |
XIE Z X, DOMEL AUGUST G., NING AN . et al. Octopus arm-inspired tapered soft actuators with suckers for improved grasping[J]. Soft Robotics, 2020, 7(5): 639-648.
|
| [21] |
曹晟阁, 于靖军, 潘杰, 等. 滚动接触柔性连续体机器人的设计与运动能力分析[J]. 机械工程学报, 2021, 57(19): 21-29.
|
|
CAO S G, YU J J, PAN J, et al. Design and moving capability analysis of a flexible continuum robot with rolling contact[J]. Journal of Mechanical Engineering, 2021, 57(19): 21-29 (in Chinese).
|
| [22] |
梁斌, 徐文福, 王学谦, 等. 自由漂浮空间机器人捕获翻滚目标的力-位-型融合控制方法[J]. 宇航学报, 2024, 45(6): 958-969.
|
|
LIANG B, XU W F, WANG X Q, et al. Force-position-model fusion control of free-floating space robots for capturing tumbling targets[J]. Journal of Astronautics, 2024, 45(6): 958-969 (in Chinese).
|
| [23] |
SHEN W J, YANG G L, ZHENG T J, et al. An accuracy enhancement method for a cable-driven continuum robot with a flexible backbone[J]. IEEE Access, 2020, 8: 37474-37481.
|
| [24] |
冯笑笑, 胡海燕, 李龙委, 等. 基于力感知的结肠镜机器人柔顺控制[J]. 机器人, 2016, 38(2): 217-224.
|
|
FENG X X, HU H Y, LI L W, et al. A compliant control of a colonoscopy robot based on force sensing[J]. Robot, 2016, 38(2): 217-224 (in Chinese).
|
| [25] |
孟光, 韩亮亮, 张崇峰. 空间机器人研究进展及技术挑战[J]. 航空学报, 2021, 42(1): 523963.
|
|
MENG G, HAN L L, ZHANG C F. Research progress and technical challenges of space robot[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523963 (in Chinese).
|
| [26] |
潘杰, 于靖军, 裴旭. 柔性手爪机构设计与变刚度技术研究发展综述[J]. 机械工程学报, 2024, 60(13): 281-296.
|
|
PAN J, YU J J, PEI X. Development of flexible gripper mechanism design and variable stiffness technology research[J]. Journal of Mechanical Engineering, 2024, 60(13): 281-296 (in Chinese).
|
| [27] |
陶永, 刘海涛, 王田苗, 等. 我国服务机器人技术研究进展与产业化发展趋势[J]. 机械工程学报, 2022, 58(18): 56-74.
|
|
TAO Y, LIU H T, WANG T M, et al. Research progress and industrialization development trend of Chinese service robot[J]. Journal of Mechanical Engineering, 2022, 58(18): 56-74 (in Chinese).
|
| [28] |
GAOZHANG W L, LI Y, SHI J L, et al. A novel stiffness-controllable joint using antagonistic actuation principles[J]. Mechanism and Machine Theory, 2024, 196: 105614.
|
| [29] |
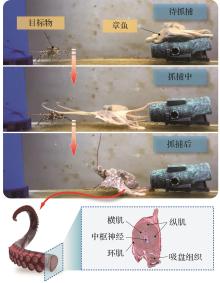
KIER W M, STELLA M P. The arrangement and function of octopus arm musculature and connective tissue[J]. Journal of Morphology, 2007, 268(10): 831-843.
|
| [30] |
邓宗全. 空间折展机构设计[M]. 哈尔滨: 哈尔滨工业大学出版社, 2013: 93-98.
|
|
DENG Z Q. Design of space deployable and foldable mechanisms[M]. Harbin: Harbin Institute of Technology Press, 2013: 93-98 (in Chinese).
|
| [31] |
黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社, 2006: 121-137.
|
|
HUANG Z, ZHAO Y S, ZHAO T S. Advanced spatial mechanism[M]. Beijing: Higher Education Press, 2006: 121-137 (in Chinese).
|
| [32] |
GARRIGA-CASANOVAS A, RODRIGUEZ Y BAENA F. Kinematics of continuum robots with constant curvature bending and extension capabilities[J]. Journal of Mechanisms and Robotics, 2019, 11(1): 011010.
|
| [33] |
王巍, 綦磊, 闫军, 等. 微小空间碎片多参数在轨探测技术[J]. 空间科学与试验学报, 2024, 1(2): 100-105.
|
|
WANG W, QI L, YAN J, et al. Micro-space-debris multiple-parameter in-situ measurement[J]. Journal of Space Science Experiment, 2024, 1(2): 100-105 (in Chinese).
|
 ), 张立永1, 樊峻辰1, 刘荣强4
), 张立永1, 樊峻辰1, 刘荣强4