杜昕, 朱喆, 胡芳芳, 黄江涛( ), 刘刚, 章胜, 单恩光, 唐骥罡
), 刘刚, 章胜, 单恩光, 唐骥罡
收稿日期:2023-04-06
修回日期:2023-05-05
接受日期:2023-06-17
出版日期:2023-07-10
发布日期:2023-07-07
通讯作者:
黄江涛
E-mail:hjtcyfx@163.com
Xin DU, Zhe ZHU, Fangfang HU, Jiangtao HUANG(), Gang LIU, Sheng ZHANG, Enguang SHAN, Jigang TANG
Received:2023-04-06
Revised:2023-05-05
Accepted:2023-06-17
Online:2023-07-10
Published:2023-07-07
Contact:
Jiangtao HUANG
E-mail:hjtcyfx@163.com
摘要:
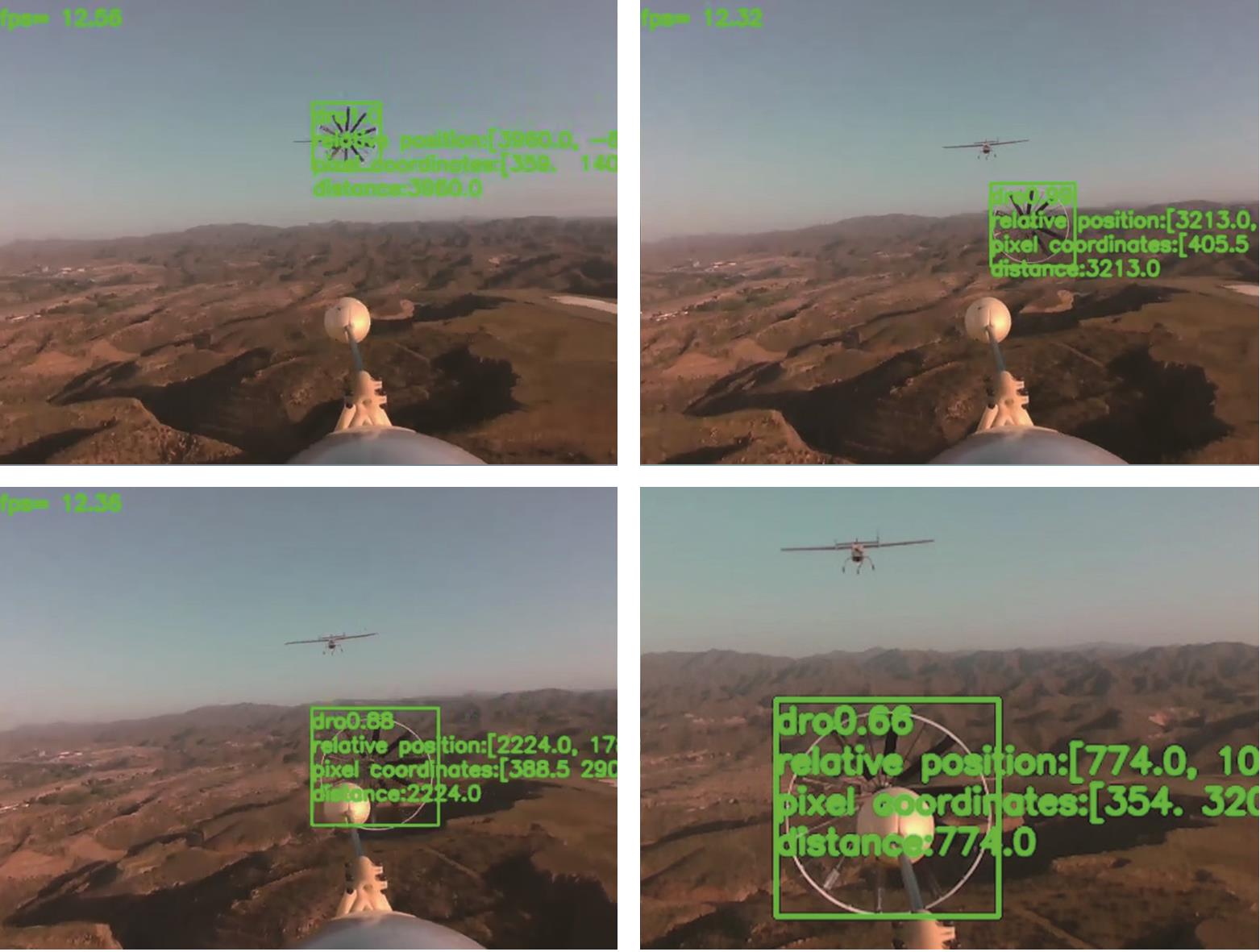
空中自主加油技术能大大提高无人机的航程航时,在军用和民用上都有着十分重要的意义。受编队气动干扰、模型不确定性、头波效应、阵风干扰等因素影响,空中无人加油的对接段是所有阶段中精度要求最高和控制难度最大的一个阶段,其导航制导与控制技术是目前研究的难点和热点。本文针对无人-无人空中自主加油场景,深入研究了软管式空中加油自主对接段的鲁棒抗扰导航制导与控制技术并进行了飞行试验验证。首先,为实现受油机加速对接时高度控制不出现振荡,采用总和能量法设计纵向制导律以实现对接末段高度和速度的协调控制;其次,为提高风干扰下的对接控制精度,分别针对加油机和受油机在不同飞行阶段的轨迹跟踪特点采用L1非线性制导思想设计了横向制导律,并采用鲁棒伺服方法设计内环姿态控制律,将积分环节引入角速率控制回路提升系统型别以更好抑制外界扰动对系统的影响;然后,基于单阶段深度学习目标检测算法YOLOV4开发了锥套识别与定位算法,在强光、云雾等复杂条件下进行采样和训练以大大提升视觉系统的鲁棒性,并采用扩展卡尔曼滤波算法将图像定位信息与RTK定位信息进行融合用于相对导航;最后,设计了无人机空中加油自主对接模拟飞行试验方案,在最大程度提高对接成功率的基础上降低安全风险,并通过飞行试验验证了本文提出的鲁棒抗扰导航制导与控制方案的有效性。
中图分类号:
杜昕, 朱喆, 胡芳芳, 黄江涛, 刘刚, 章胜, 单恩光, 唐骥罡. 空中无人加油自主对接导航制导与控制[J]. 航空学报, 2023, 44(20): 628827-628827.
Xin DU, Zhe ZHU, Fangfang HU, Jiangtao HUANG, Gang LIU, Sheng ZHANG, Enguang SHAN, Jigang TANG. Guidance, navigation and control for airborne docking of autonomous aerial refueling[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628827-628827.
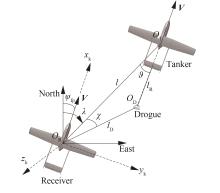
图 1
加油机和受油机相对位置定义
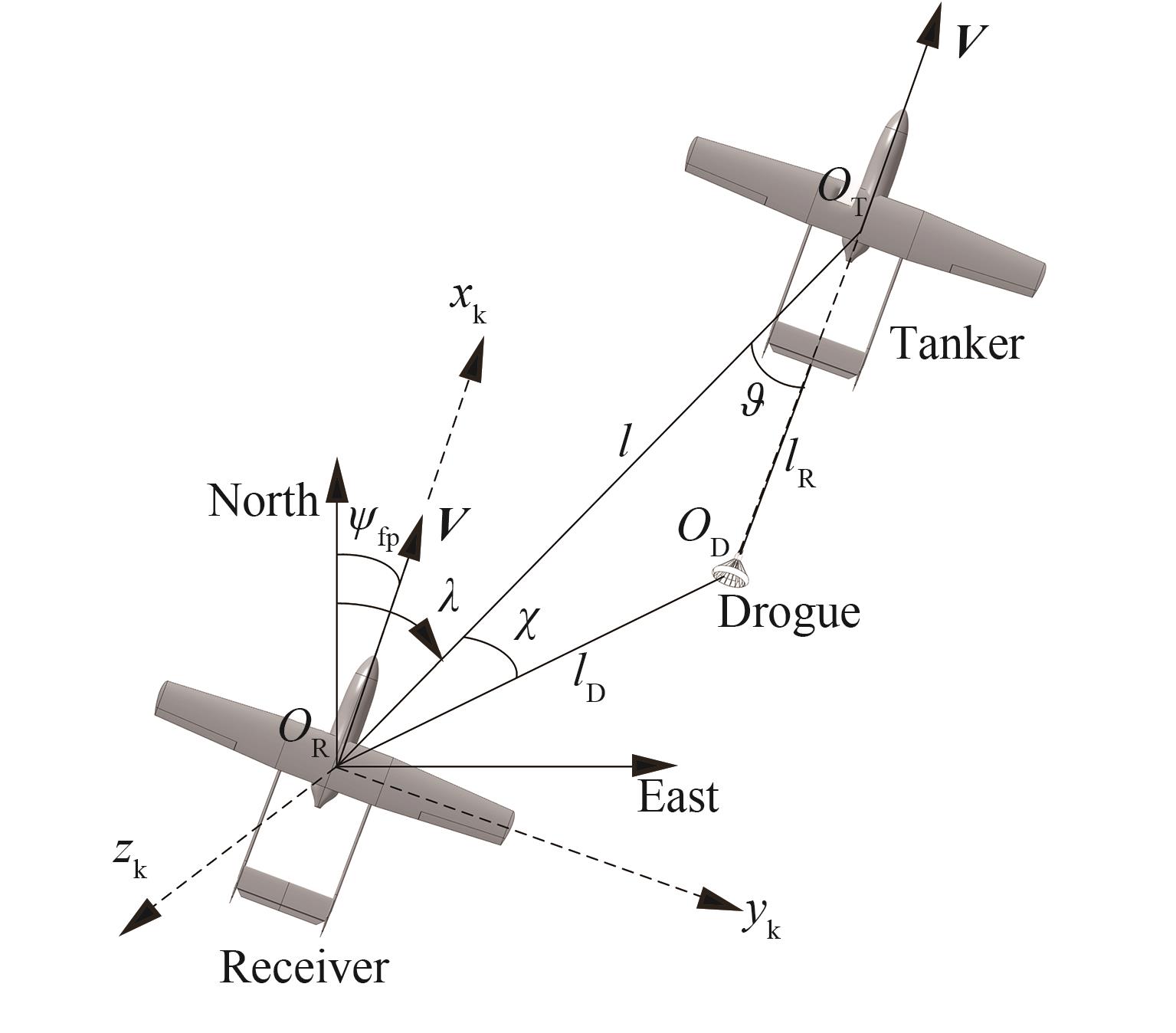
图 2
L1制导原理
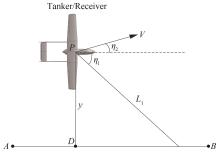
图 3
L1制导-航线跟踪
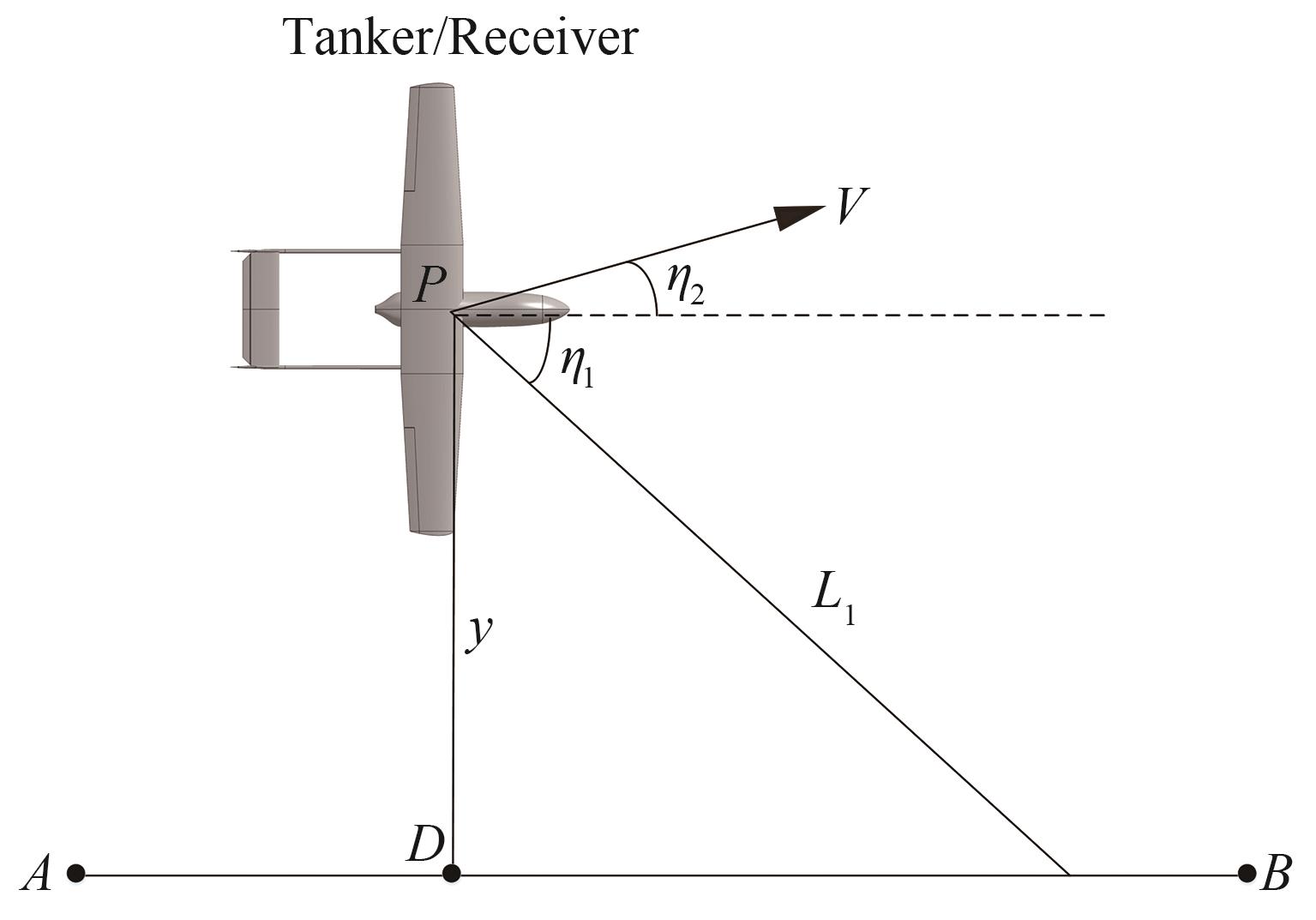
图 4
L1制导-跟踪锥套
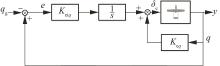
图 5
俯仰角回路控制器结构
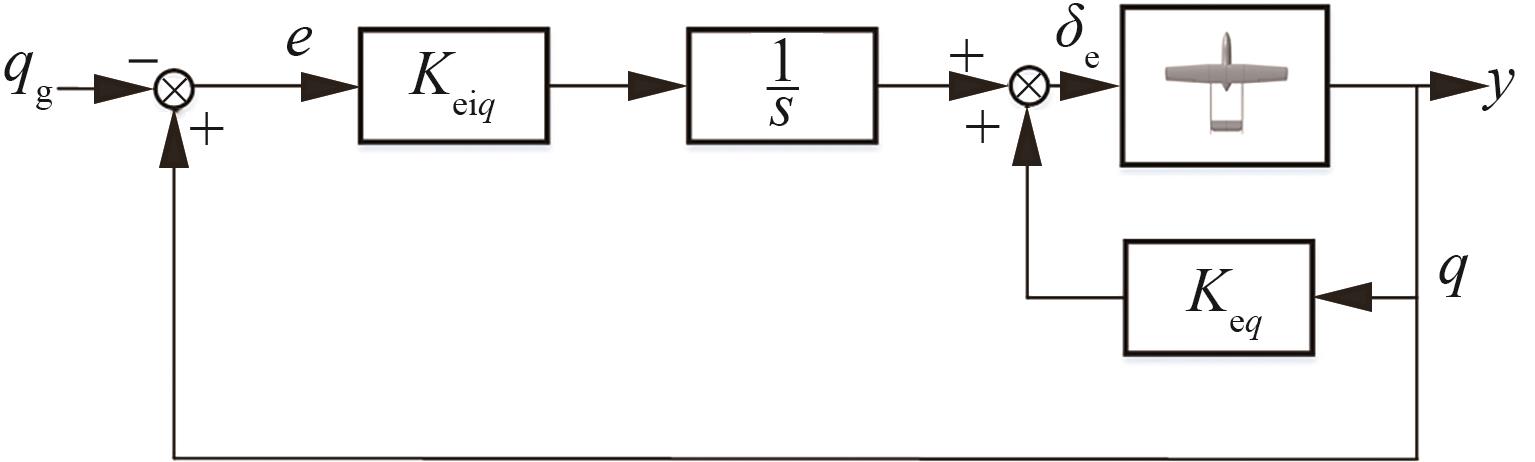

图 6
YOLOv4的网络结构
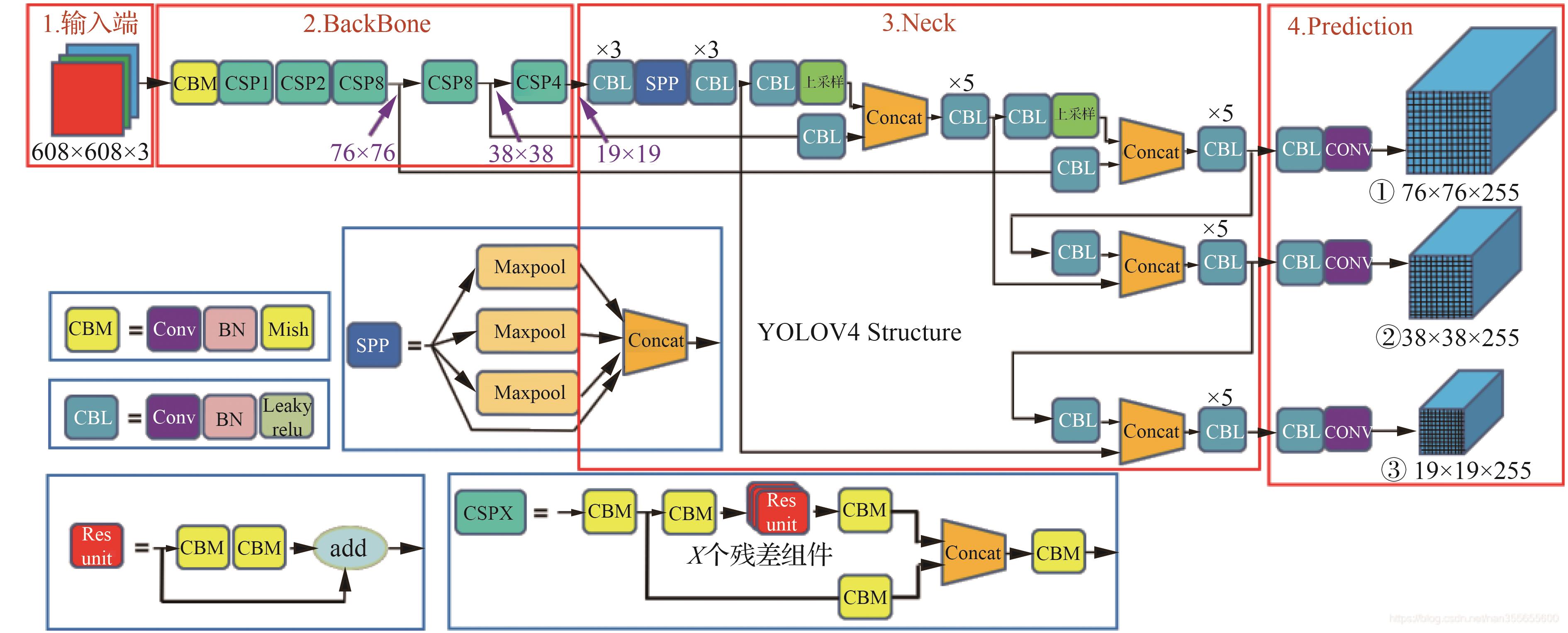

图 7
双目视觉相机与计算板
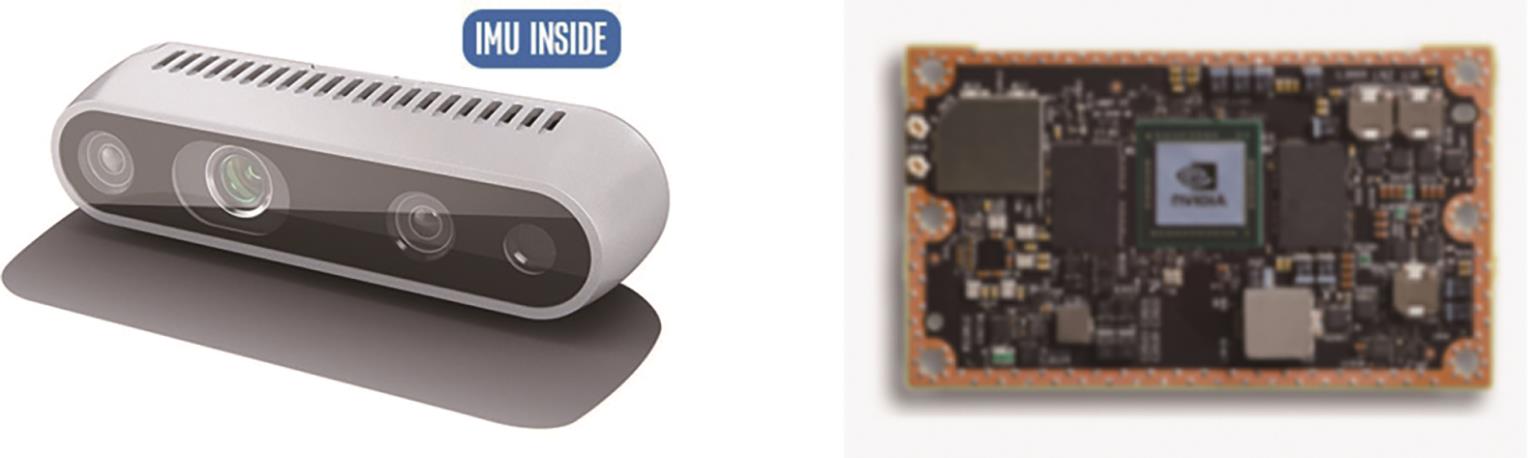
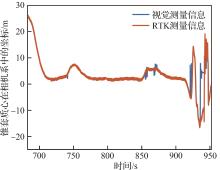
图 8
视觉测量信息与RTK信息(x方向)
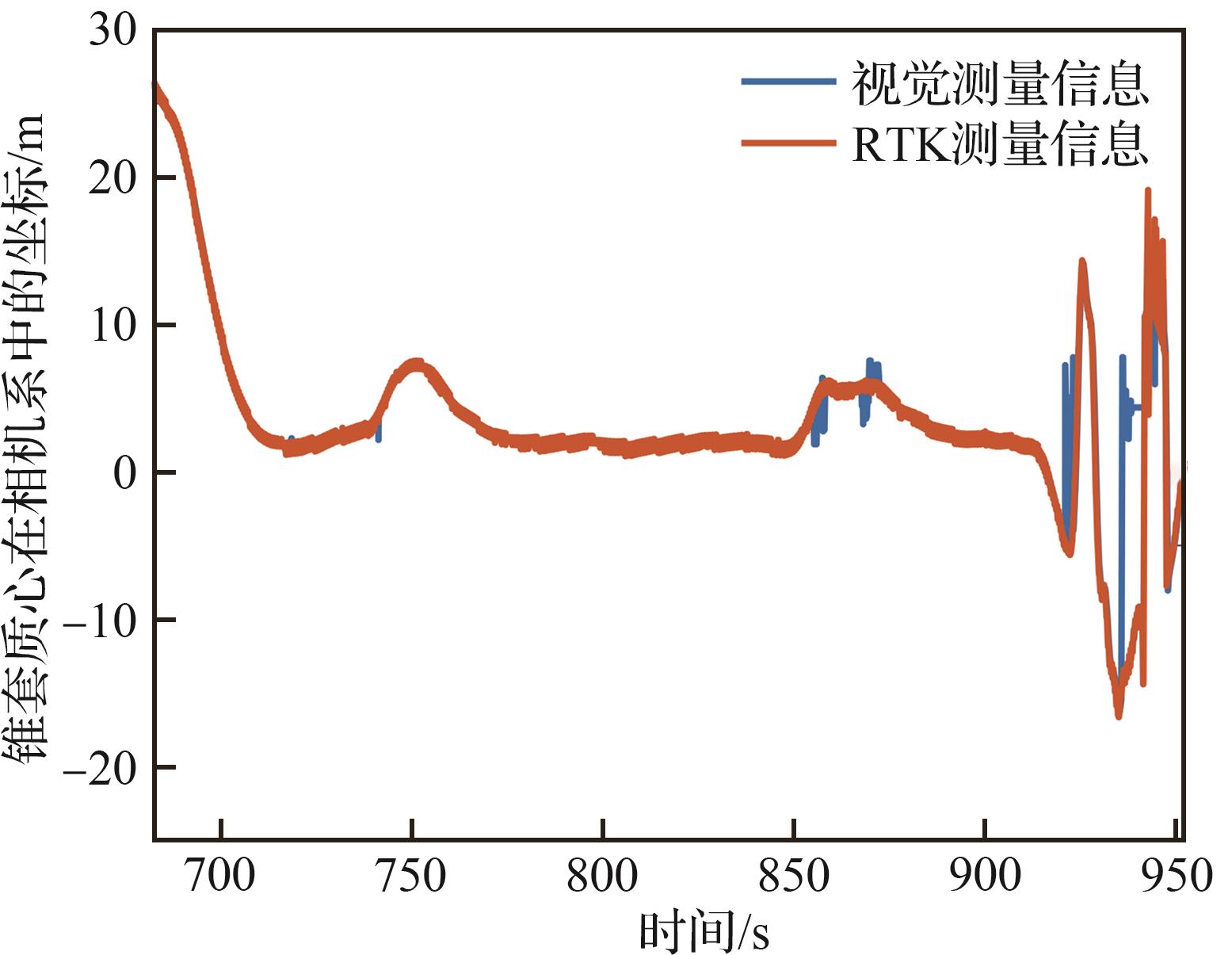
图 9
视觉测量信息与RTK信息(y方向)
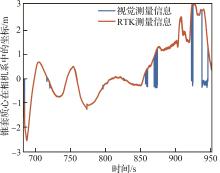
图 10
视觉测量信息与RTK信息(z方向)
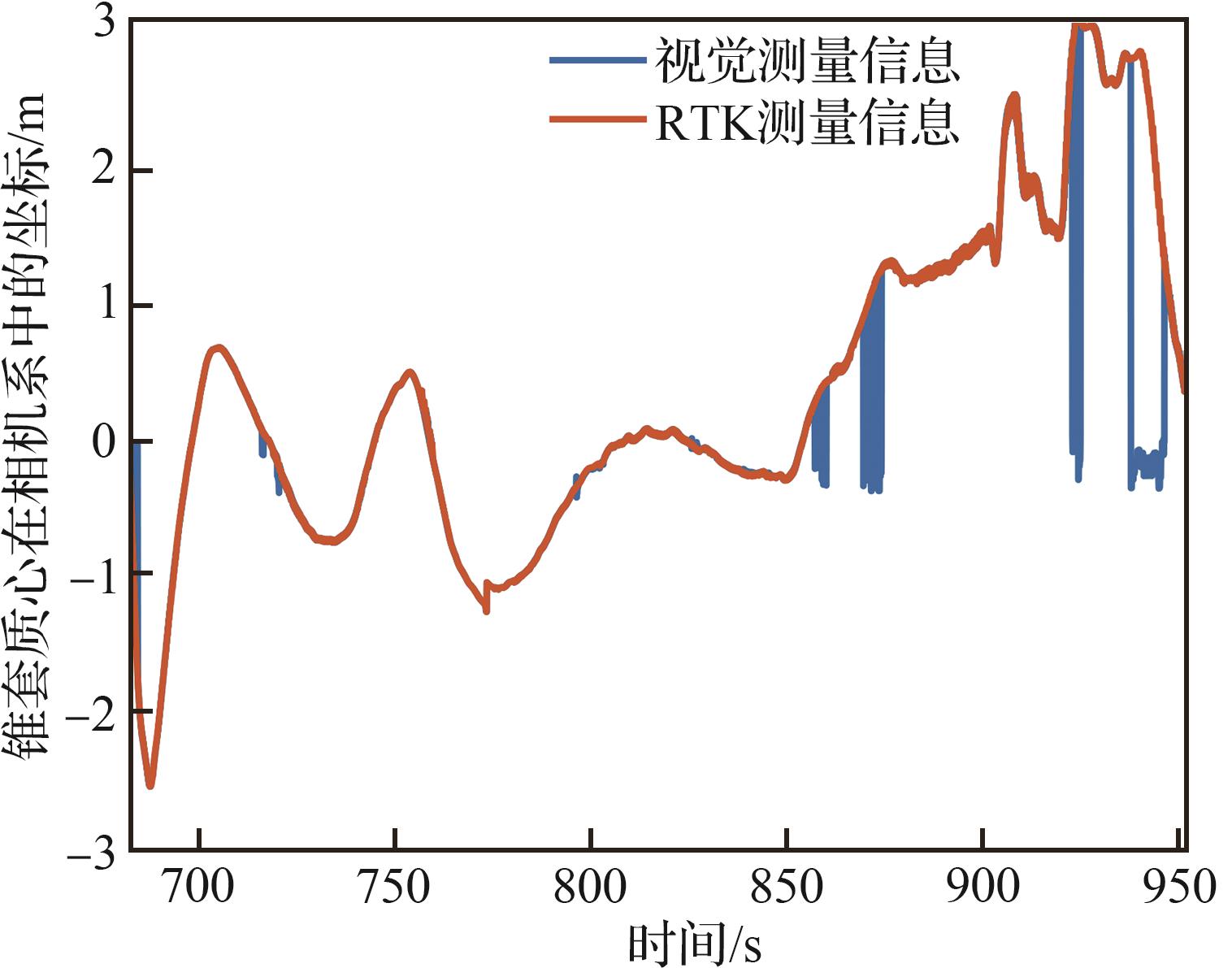

图 11
预期飞行航线


图 12
试验无人机


图 13
飞控计算机和惯导系统
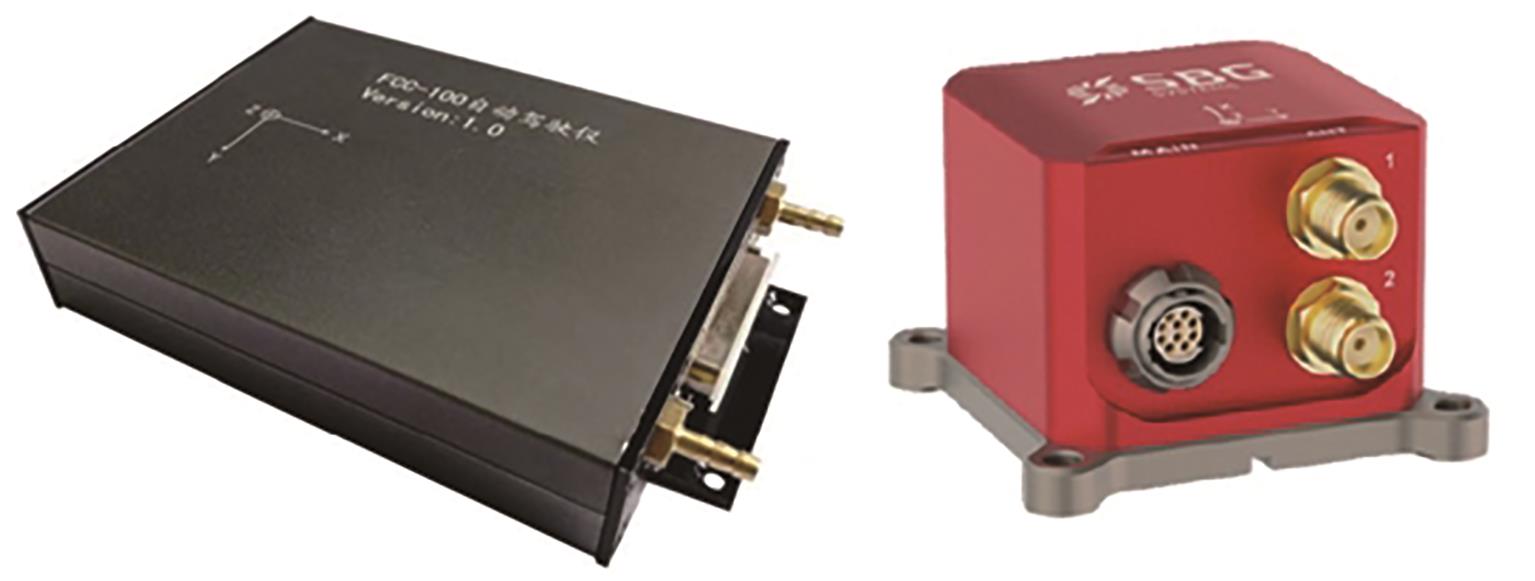
图 14
高度跟踪曲线
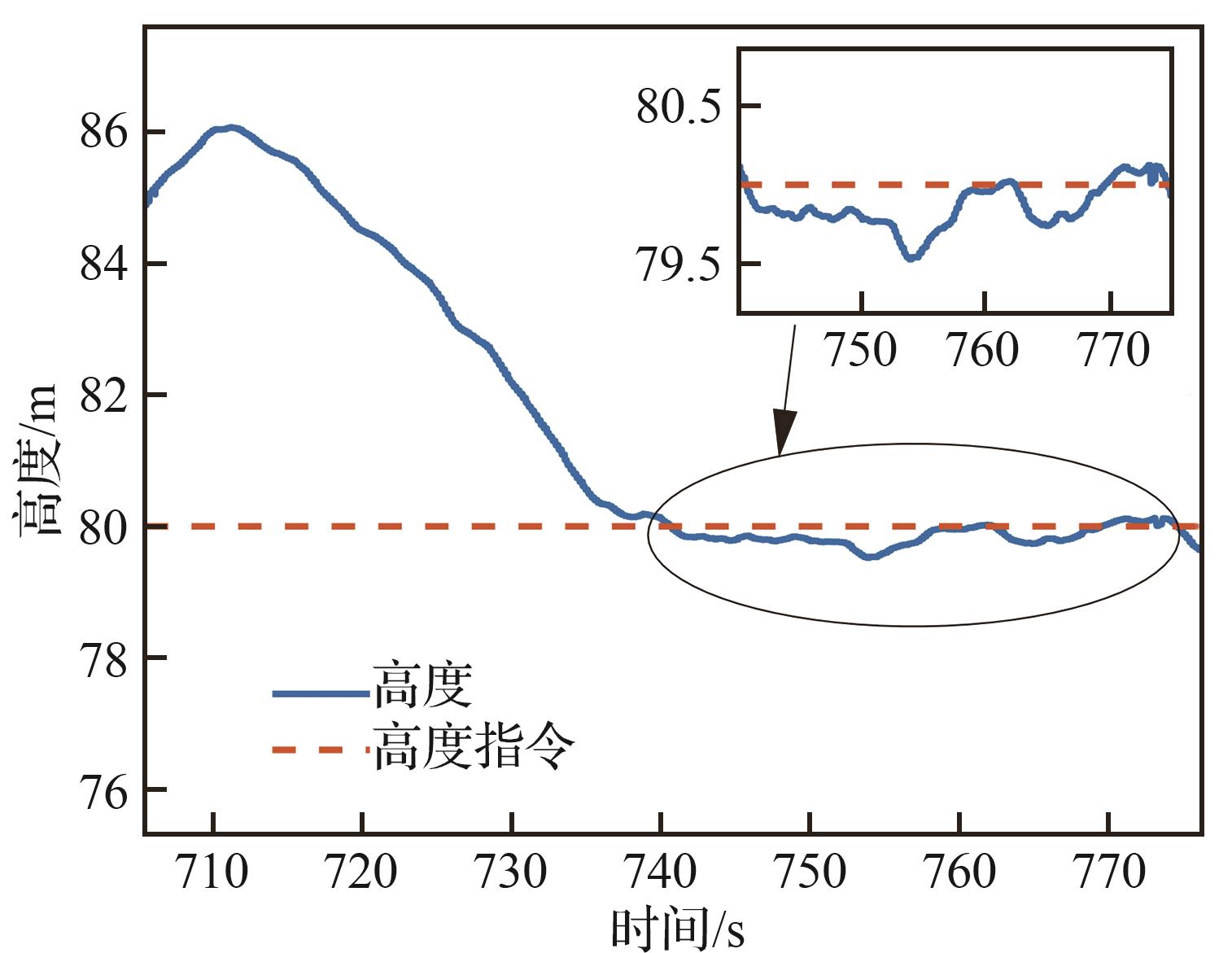
图 15
飞行速度跟踪曲线
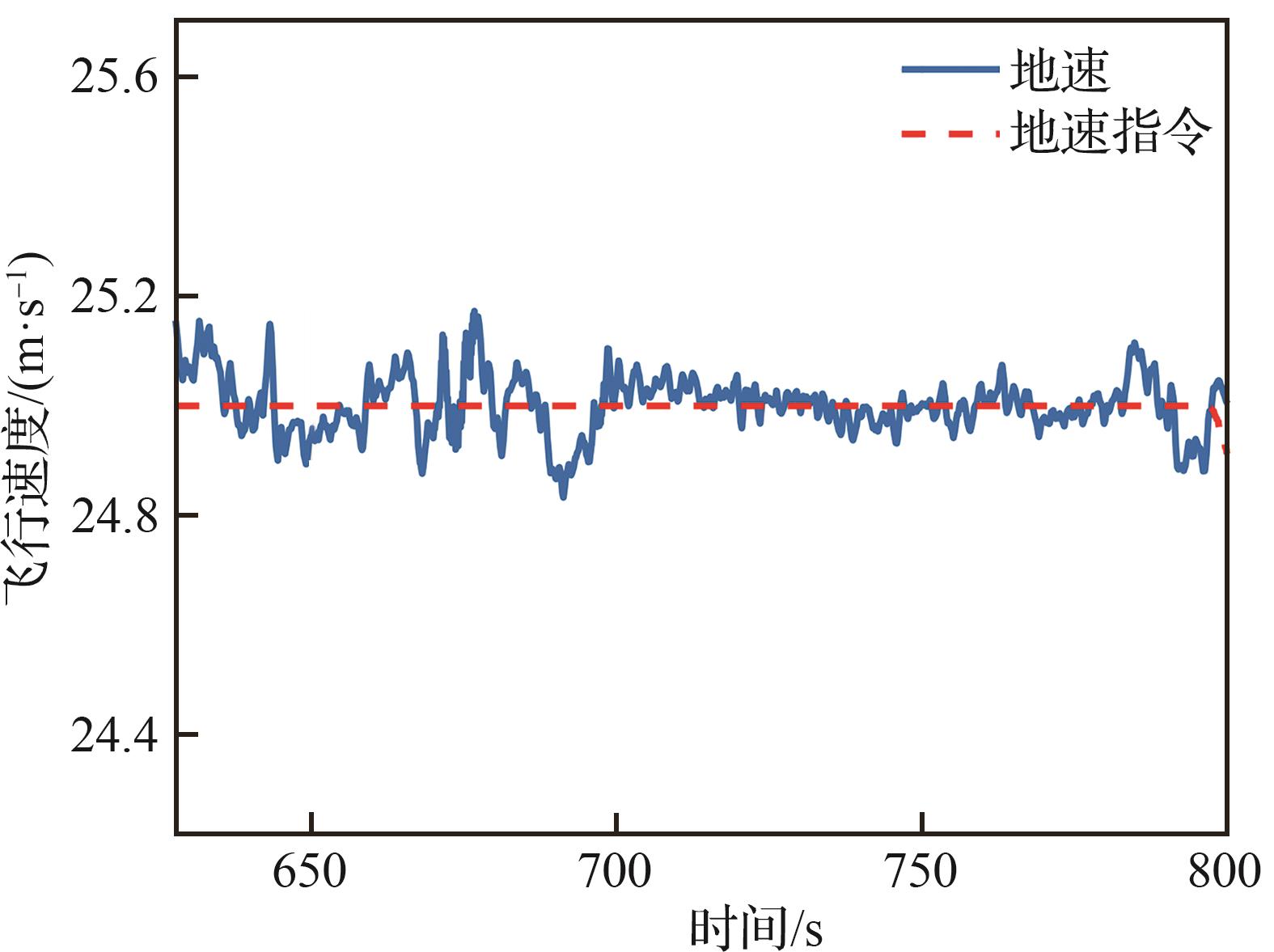
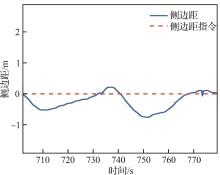
图 16
航线跟踪侧边距曲线
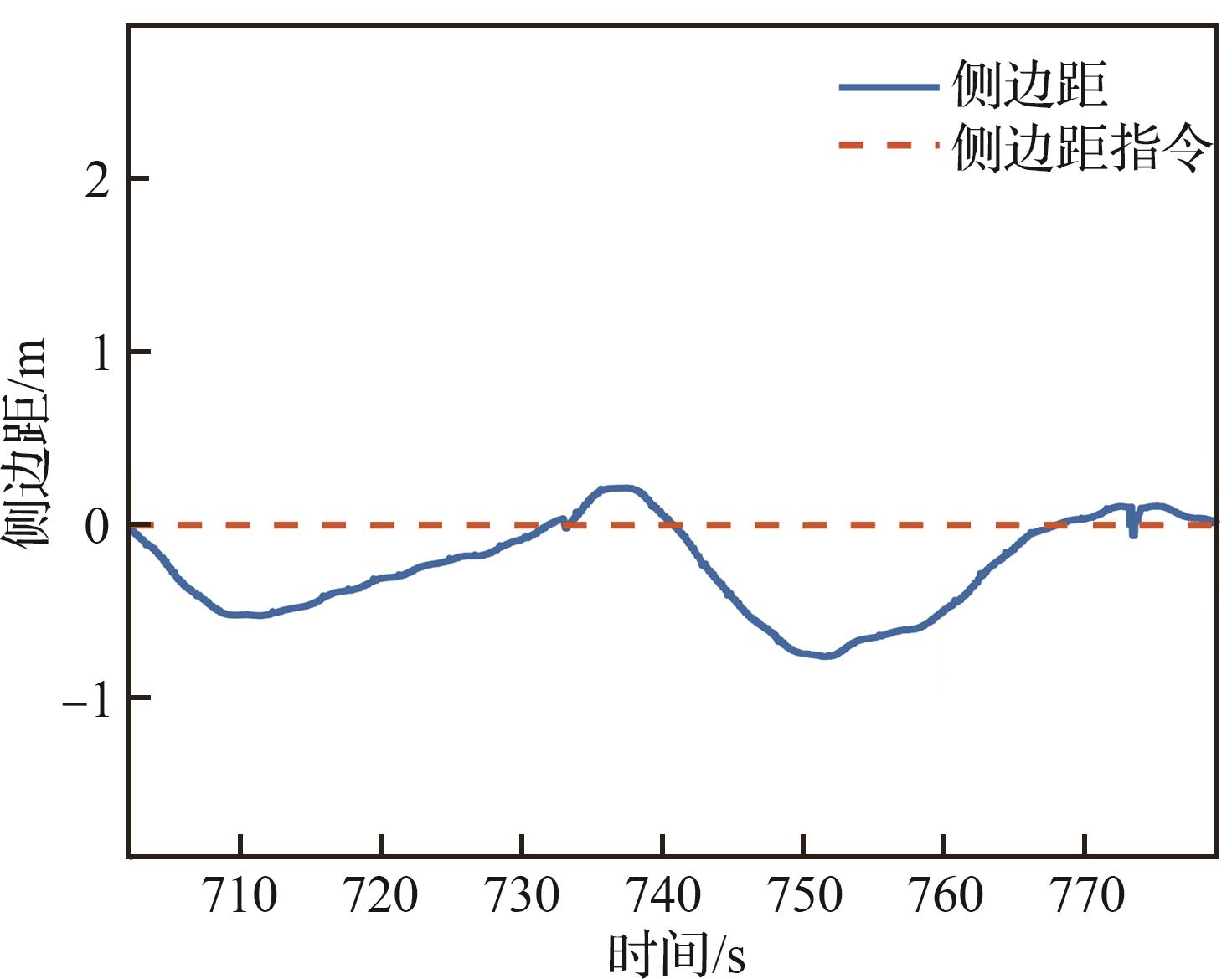
图 17
俯仰角控制曲线
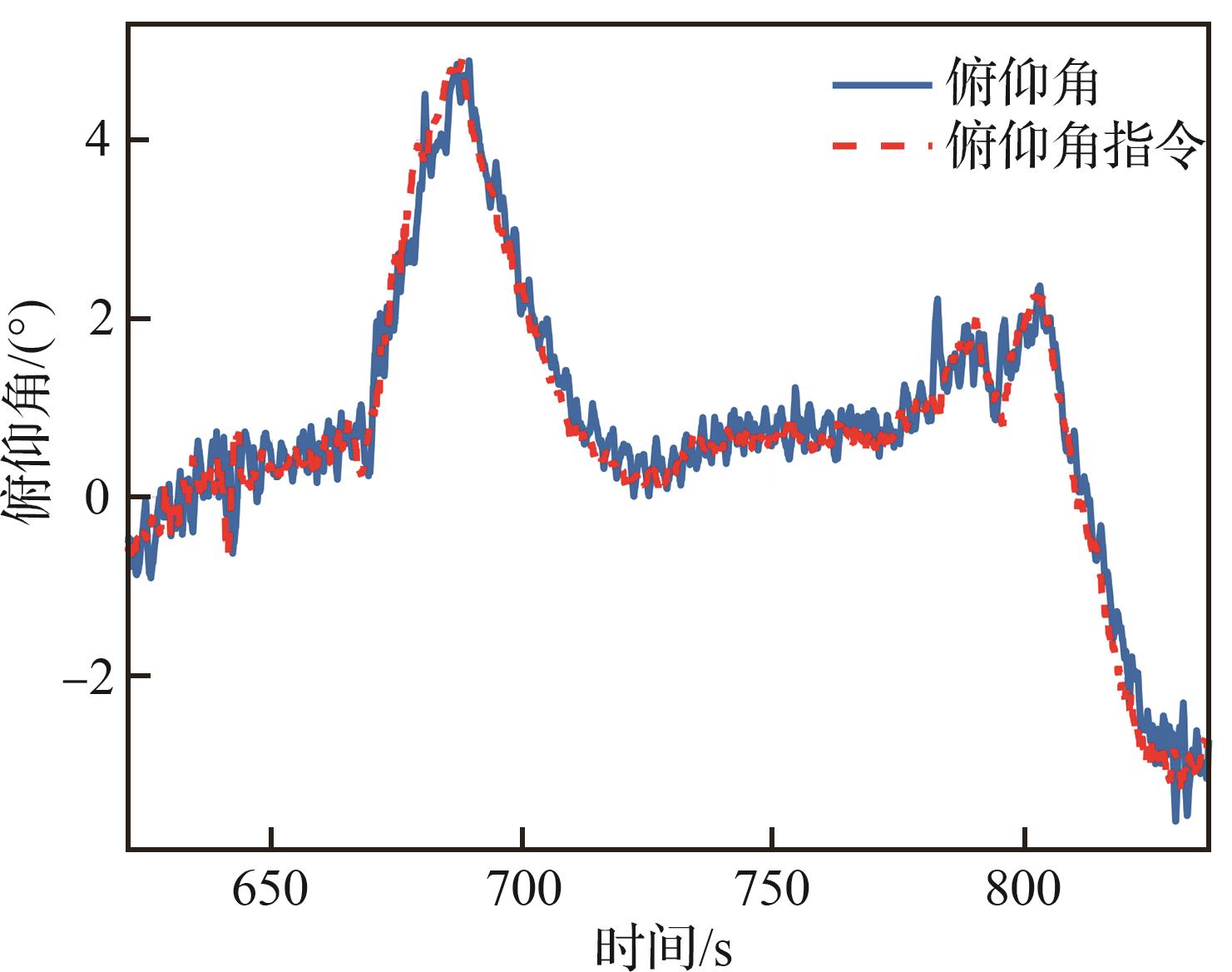
图 18
滚转角控制曲线
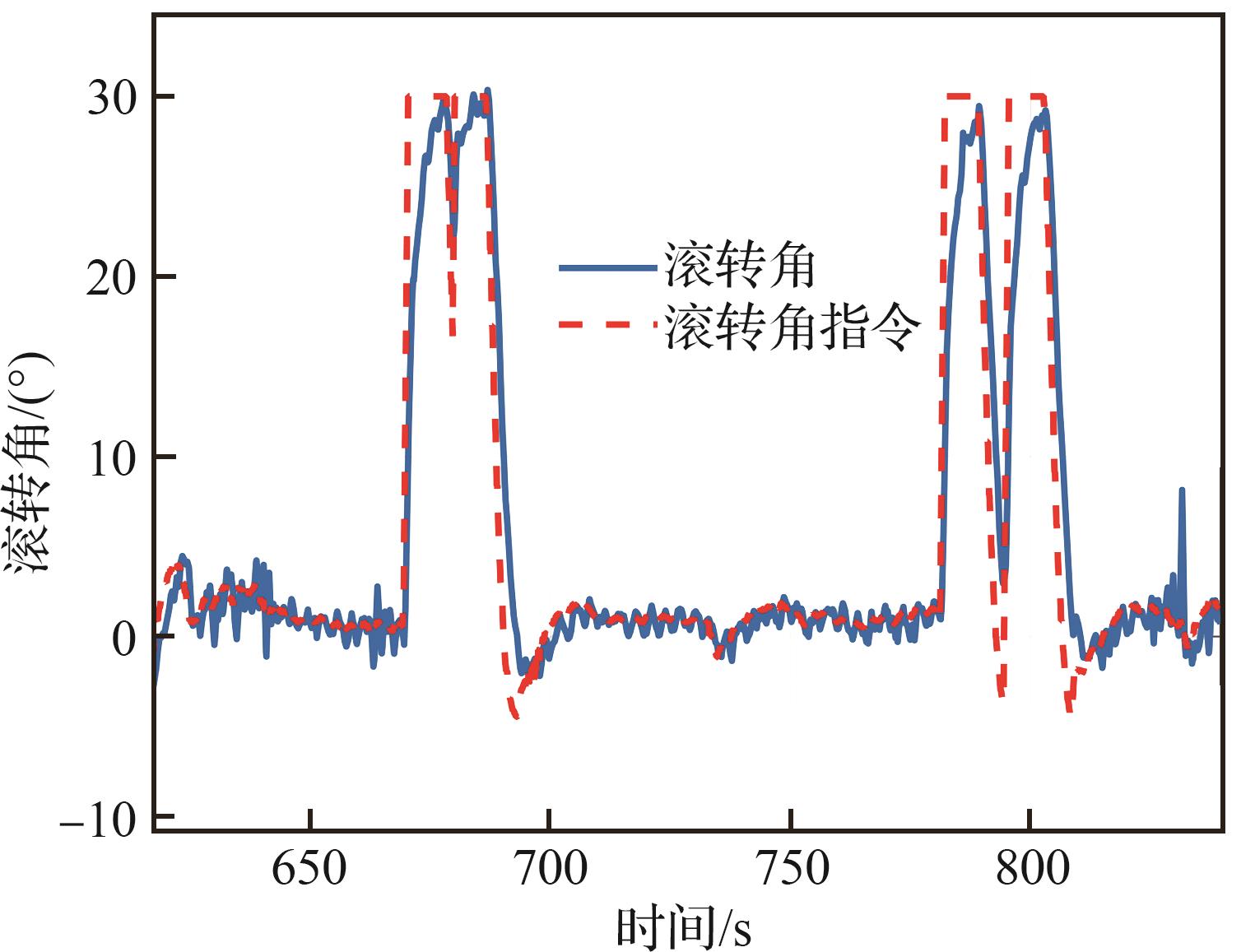
图 19
近距编队飞行结果
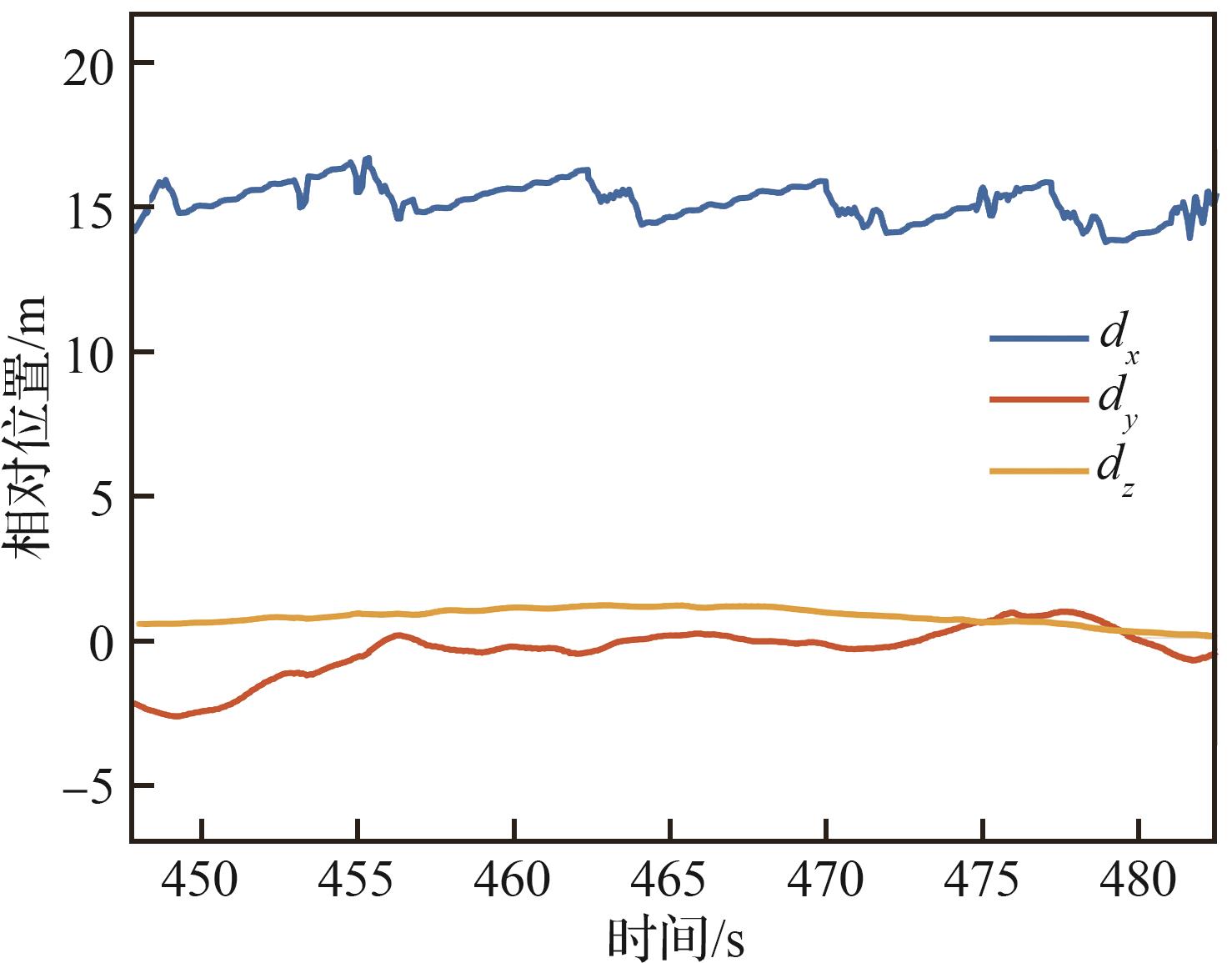
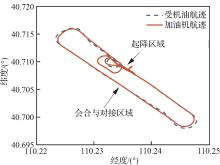
图 20
双机航迹(水平面投影)
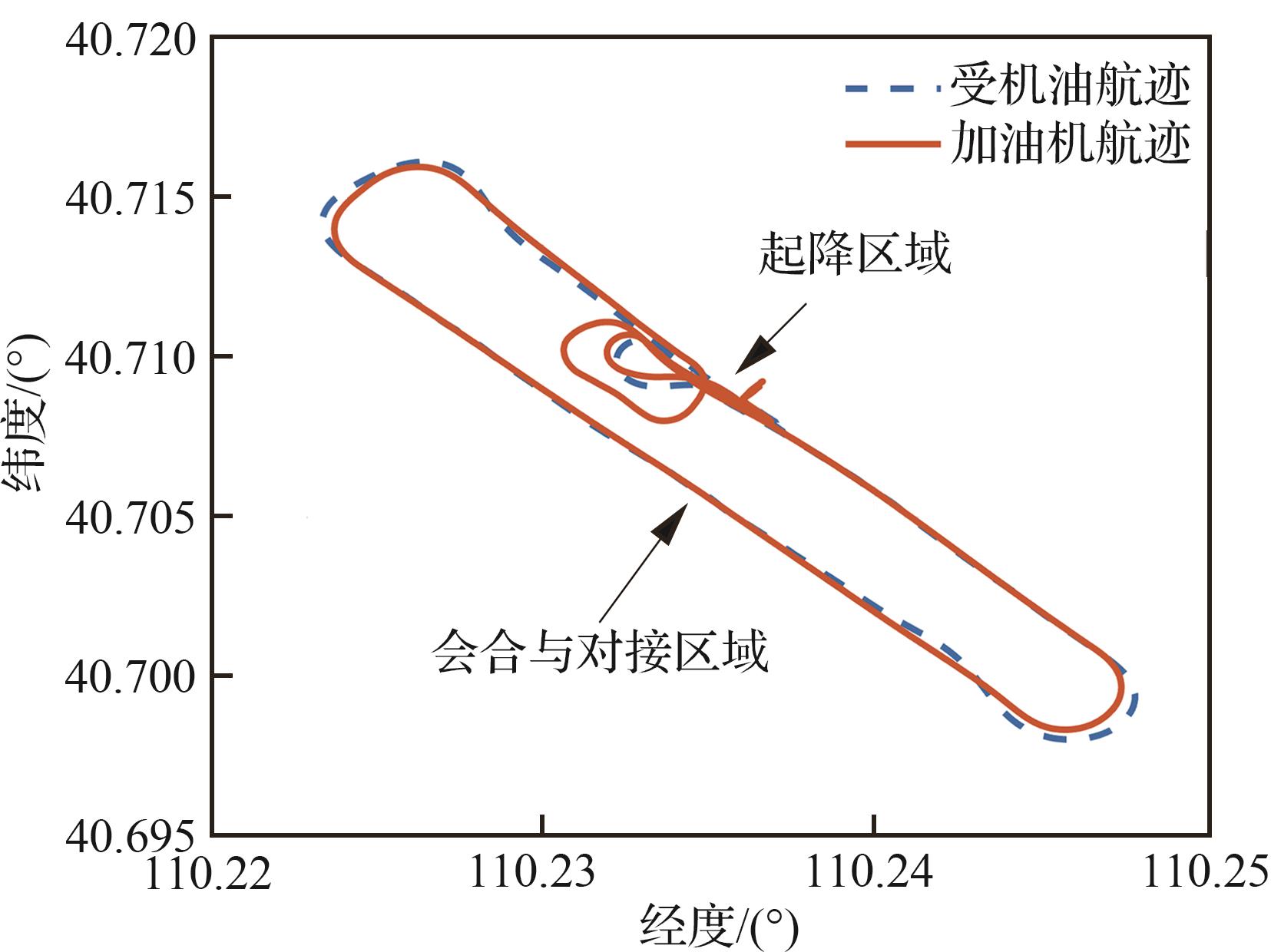
图 21
连续2次对接尝试
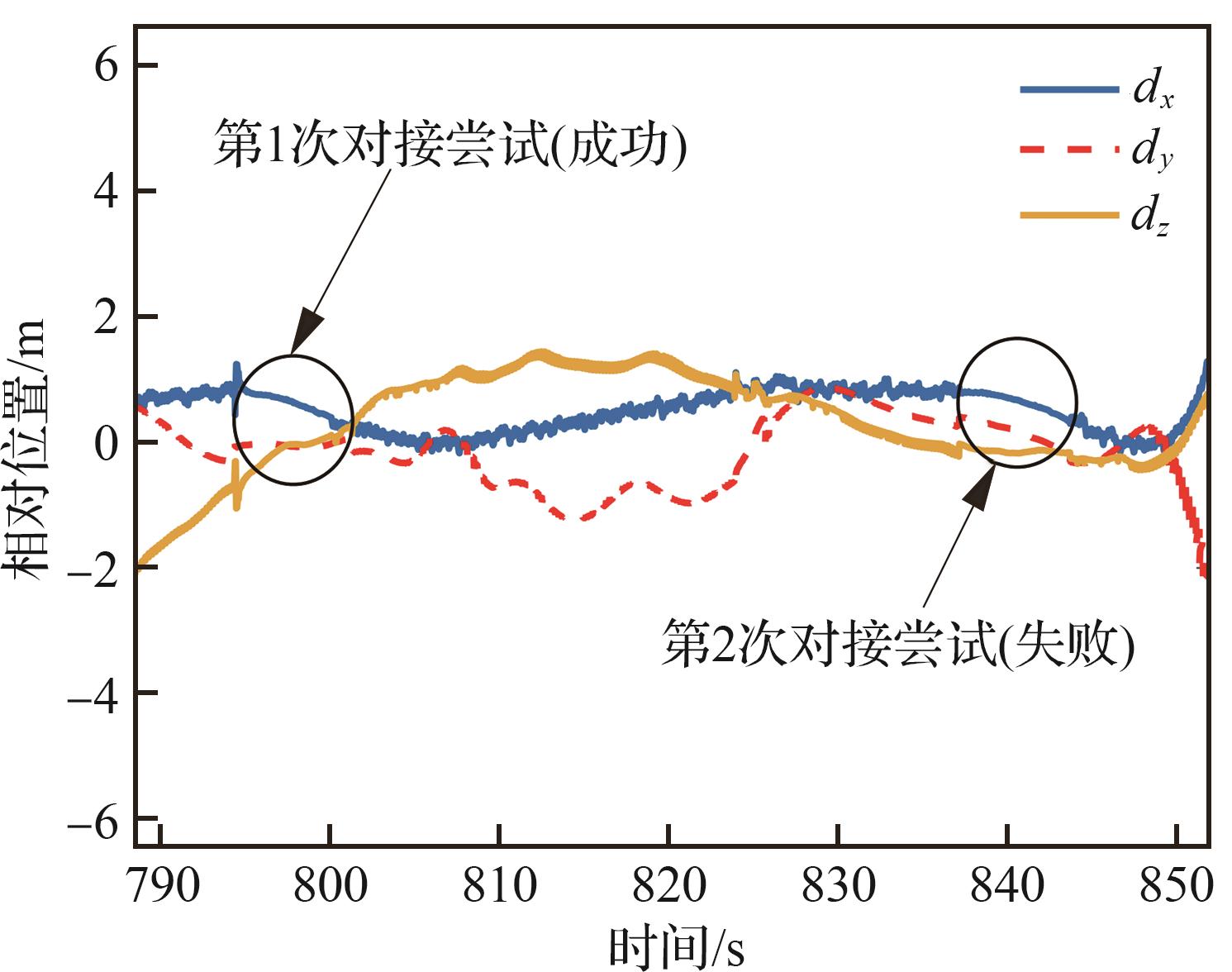
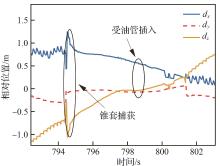
图 22
自主对接过程的相对位置曲线
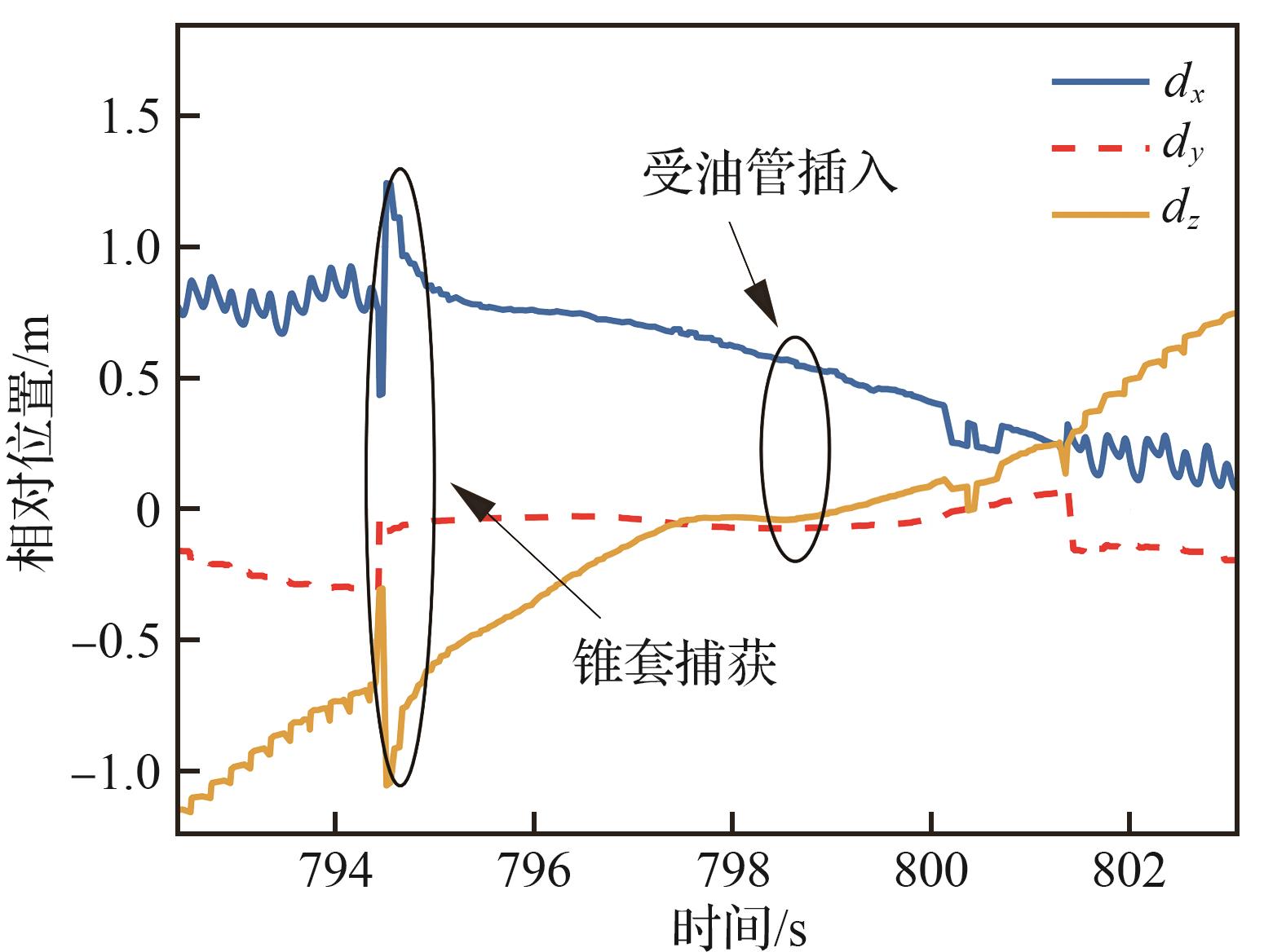
图 23
视觉系统拍摄的对接过程图
| 1 | 全权, 魏子博, 高俊, 等. 软管式自主空中加油对接阶段中的建模与控制综述[J]. 航空学报, 2014, 35(9): 2390-2410. |
| QUAN Q, WEI Z B, GAO J, et al. A survey on modeling and control problems for probe and drogue autonomous aerial refueling at docking stage[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(9): 2390-2410 (in Chinese). | |
| 2 | DANIEL B W. Guidance, navigation and control for UAV close formation flight and airborne docking[D]. Sydney: The University of Sydney, 2015. |
| 3 | 陈冠宇. 无人机空中加油对接引导技术[D]. 南京: 南京航空航天大学, 2019. |
| CHEN G Y. Docking guidance technology for aerial refueling of unmanned aerial vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019 (in Chinese). | |
| 4 | DIBLEY R, ALLEN M, NABAA N. Autonomous airborne refueling demonstration phase I flight-test results: AIAA-2007-6639[R]. Reston: AIAA, 2007. |
| 5 | HANSEN J, MURRAY J, CAMPOS N. The NASA Dryden AAR project: A flight test approach to an aerial refueling system: AIAA-2004-4939[R]. Reston: AIAA, 2004. |
| 6 | MCMORROW S E, SHERRARD R. Mission information and test systems summary of accomplishments: NASA/TM-2013-216043.2011[R]. Washington, D.C.: NASA, 2013. |
| 7 | SHULGIN D. X-47B unmanned aircraft demonstrates the first autonomous aerial refueling[EB/OL]. (2015-04-23)[2015-04-26]. . |
| 8 | 李大伟, 王宏伦. 自动空中加油阶段加油机尾涡流场建模与仿真[J]. 北京航空航天大学学报, 2010, 36(7): 776-780, 797. |
| LI D W, WANG H L. Wake vortex effect modeling and simulation in automated aerial refueling[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(7): 776-780, 797 (in Chinese). | |
| 9 | 胡孟权, 柳平, 聂鑫, 等. 大气紊流对空中加油软管锥套运动的影响[J]. 飞行力学, 2010, 28(5): 20-23. |
| HU M Q, LIU P, NIE X, et al. Influence of air turbulence on the movement of hose-drogue[J]. Flight Dynamics, 2010, 28(5): 20-23 (in Chinese). | |
| 10 | 程钊, 于方圆. 受油机扰动特性的建模与仿真[J]. 兵工自动化, 2013, 32(10): 8-11. |
| CHENG Z, YU F Y. Modeling and simulation of receiver aircraft disturbance characteristics[J]. Ordnance Industry Automation, 2013, 32(10): 8-11 (in Chinese). | |
| 11 | 陈乐乐. 软式空中加油气动相容性及动态特性研究[D]. 南京: 南京航空航天大学, 2017. |
| CHEN L L. Research on aerodynamic compatibility and dynamic characteristics of hose-drogue aerial refuling system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017 (in Chinese). | |
| 12 | 徐坚, 张晓非. 软式空中加油头波效应建模与仿真[J]. 飞行力学, 2019, 37(5): 40-44. |
| XU J, ZHANG X F. Dynamic modeling and simulation of bow wave effect in hose-drogue aerial refueling system[J]. Flight Dynamics, 2019, 37(5): 40-44 (in Chinese). | |
| 13 | 王健, 董新民, 徐跃鉴, 等. 软式空中加油受油机头波数值仿真分析[J]. 飞行力学, 2016, 34(1): 54-58. |
| WANG J, DONG X M, XU Y J, et al. Simulation and analysis of the bow wave effect of the receiver in hose-drogue aerial refueling[J]. Flight Dynamics, 2016, 34(1): 54-58 (in Chinese). | |
| 14 | 刘海洲. 考虑头波效应影响的自主空中加油对接技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| LIU H Z. Reseach on autonomous aerial refueling docking under bow wave[D]. Harbin: Harbin Institute of Technology, 2020 (in Chinese). | |
| 15 | 张博连. 无人机自主空中加油对接控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| ZHANG B L. Docking control method for autonomous aerial refueling for unmanned aerial vehicles[D]. Harbin: Harbin Institute of Technology, 2018 (in Chinese). | |
| 16 | 宋海军. 无人机空中加油会合阶段制导控制研究[D]. 南京: 南京航空航天大学, 2014. |
| SONG H J. Research on guidance and control technology of the rendezvous for autonomous aerial refueling of unmanned aerial vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014 (in Chinese). | |
| 17 | 吴腾飞. 无人机软式自主空中加油视觉导航技术研究[D]. 南京: 南京航空航天大学, 2015. |
| WU T F. Vision-based navigation for UAV probe and drogue autonomous aerial refueling[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2015 (in Chinese). | |
| 18 | 慕春棣, 李波睿. 基于视觉的自动空中加油技术[J]. 清华大学学报(自然科学版), 2012, 52(5): 670-676, 681. |
| MU C D, LI B R. Vision-based autonomous aerial refueling[J]. Journal of Tsinghua University (Science and Technology), 2012, 52(5): 670-676, 681 (in Chinese). | |
| 19 | 解洪文, 王宏伦. 基于双目视觉的自动空中加油近距导航方法[J]. 北京航空航天大学学报, 2011, 37(2): 206-209. |
| XIE H W, WANG H L. Binocular vision-based short-range navigation method for autonomous aerial refueling[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(2): 206-209 (in Chinese). | |
| 20 | 郭军, 董新民, 徐跃鉴, 等. 无人机空中加油自主会合控制器设计[J]. 控制与决策, 2010, 25(4): 567-571. |
| GUO J, DONG X M, XU Y J, et al. Design of UAV autonomous controller for rendezvous in aerial refueling[J]. Control and Decision, 2010, 25(4): 567-571 (in Chinese). | |
| 21 | 盖文东, 王宏伦, 李大伟. 基于自适应动态逆的自动空中加油轨迹跟踪[J]. 北京航空航天大学学报, 2012, 38(5): 585-590. |
| GAI W D, WANG H L, LI D W. Trajectory tracking for automated aerial refueling based on adaptive dynamic inversion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(5): 585-590 (in Chinese). | |
| 22 | KHANSARI-ZADEH S M, SAGHAFI F. Vision-based navigation in autonomous close proximity operations using neural networks[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 864-883. |
| 23 | HOWARD J M, VETH M J. Image aided relative navigation for air vehicles using a passive, statistical predictive rendering approach[C]∥ 24th International Technical Meeting of the Satellite Division of the Institute of Navigation 2011. Manassas: ION, 2011: 3546-3556. |
| 24 | DOEBBLER J, VALASEK J, MONDA M, et al. Boom and receptacle autonomous air refueling using a visual pressure snake optical sensor: AIAA-2006-6504[R]. Reston: AIAA, 2006. |
| 25 | MAMMARELLA M, CAMPA G, NAPOLITANO M R, et al. Machine vision/GPS integration using EKF for the UAV aerial refueling problem[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2008, 38(6): 791-801. |
| 26 | MAMMARELLA M, CAMPA G, NAPOLITANO M R, et al. Comparison of point matching algorithms for the UAV aerial refueling problem[J]. Machine Vision and Applications, 2010, 21(3): 241-251. |
| 27 | MARTINEZ C, RICHARDSON T, CAMPOY P. Towards autonomous air-to-air refueling for UAVs using visual information[C]∥ 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2013: 26-31. |
| 28 | NICHOLS J W, SUN L, BEARD R W, et al. Aerial rendezvous of small unmanned aircraft using a passive towed cable system[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(4): 1131-1142. |
| 29 | 许勇, 颜鸿涛, 贾涛, 等. 固定翼集群无人机空中模拟对接技术[J]. 航空学报, 2023, 44(5): 326539. |
| XU Y, YAN H T, JIA T, et al. Aerial simulation docking technology of fixed-wing clustering UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(5): 326539 (in Chinese). | |
| 30 | CAMPA G, FRAVOLINI M L, FICOLA A, et al. Autonomous aerial refueling for UAVs using a combined GPS-machine vision guidance: AIAA-2004-5350[R]. Reston: AIAA, 2004. |
| 31 | DARLING M B. Autonomous close formation flight of small UAVS using vision-based localization[D]. Pasadena: California Polytechnic State University, 2014. |
| 32 | FOSBURY A M, CRASSIDIS J L. Relative navigation of air vehicles[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(4): 824-834. |
| 33 | LUGO J J, MASSELLI A, ZELL A. Following a quadrotor with another quadrotor using onboard vision[C]∥ 2013 European Conference on Mobile Robots. Piscataway: IEEE Press, 2013: 5756-5762. |
| 34 | VALASEK J, GUNNAM K, KIMMETT J, et al. Vision-based sensor and navigation system for autonomous air refueling[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(5): 979-989. |
| 35 | TANDALE M D, BOWERS R, VALASEK J. Trajectory tracking controller for vision-based probe and drogue autonomous aerial refueling[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(4): 846-857. |
| 36 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]∥ 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2014: 580-587. |
| 37 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 38 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single shot MultiBox detector[C]∥ European Conference on Computer Vision. Cham: Springer Cham, 2016: 21-37. |
| 39 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]∥ 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016: 779-788. |
| 40 | WANG Y X, WANG H L, LIU B L, et al. A visual navigation framework for the aerial recovery of UAVs[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-13. |
| 41 | DOGAN A, BLAKE W, HAAG C. Bow wave effect in aerial refueling: Computational analysis and modeling[J]. Journal of Aircraft, 2013, 50(6): 1856-1868. |
| 42 | BHANDARI U, THOMAS P, BULLOCK S, et al. Bow wave effect in probe and drogue aerial refuelling: AIAA-2013-4695[R]. Reston: AIAA, 2013 |
| 43 | LEWIS T A. Flight data analysis and simulation of wind effects during aerial refueling[D]. Arlington: The University of Texas at Arlington, 2008. |
| 44 | MAHBOUBI Z, KOLTER Z, WANG T, et al. Camera based localization for autonomous UAV formation flight: AIAA-2011-1658[R]. Reston: AIAA, 2011. |
| 45 | PARK S, DEYST J, HOW J. A new nonlinear guidance logic for trajectory tracking: AIAA-2004-4900[R]. Reston: AIAA, 2004. |
| 46 | WATANABE Y, JOHNSON E, CALISE A. Stochastically optimized monocular vision-based guidance design: AIAA-2007-6865[R]. Reston: AIAA, 2007. |
| 47 | FRAVOLINI M L, FICOLA A, CAMPA G, et al. Modeling and control issues for autonomous aerial refueling for UAVs using a probe-drogue refueling system[J]. Aerospace Science and Technology, 2004, 8(7): 611-618. |
| 48 | REHAN M, KHAN Z H. Robust formation control for aerial refueling[C]∥ 2012 International Conference of Robotics and Artificial Intelligence. Piscataway: IEEE Press, 2012: 11-18. |
| 49 | 王宏伦, 杜熠, 盖文东. 无人机自动空中加油精确对接控制[J]. 北京航空航天大学学报, 2011, 37(7): 822-826. |
| WANG H L, DU Y, GAI W D. Precise docking control in unmanned aircraft vehicle automated aerial refueling[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(7): 822-826 (in Chinese). | |
| 50 | KIMMETT J, VALASEK J, JUNKINS J. Autonomous aerial refueling utilizing: A vision based navigation system: AIAA-2002-4469[R]. Reston: AIAA, 2002. |
| 51 | 李大伟, 王宏伦. 无人机自动空中加油飞行控制技术[J]. 系统仿真学报, 2010, 22(S1): 126-130. |
| LI D W, WANG H L. UAV Flight control in automated aerial refueling[J]. Journal of System Simulation, 2010, 22(S1): 126-130 (in Chinese). | |
| 52 | REN J R, DAI X H, QUAN Q A, et al. Reliable docking control scheme for probe⁃drogue refueling[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(11): 2511-2520. |
| 53 | COOPER J R, ROTHHAAR P M. Dynamics and control of in-flight wingtip docking[J]. Journal of Guidance, Control, and Dynamics: A Publication of the American Institute of Aeronautics and Astronautics Devoted to the Technology of Dynamics and Control, 2018, 41(11): 2327-2337. |
| 54 | 段镇. 无人机鲁棒伺服LQR飞行控制律设计[J]. 计算机测量与控制, 2015, 23(8): 2713-2715. |
| DUAN Z. Robust servo LQR flight control law design of UAV[J]. Computer Measurement & Control, 2015, 23(8): 2713-2715 (in Chinese). | |
| 55 | LAVRETSKY E, WISE K A. Robust and adaptive control with output feedback[M]∥ Robust and Adaptive Control. London: Springer London, 2013: 417-449. |
| 56 | 廖伟. 扑翼飞行器自主控制技术研究[D]. 杭州: 浙江大学, 2020. |
| LIAO W. Research of autonomous control technology for the flapping-wing aircraft[D]. Hangzhou: Zhejiang University, 2020 (in Chinese). |
| [1] | 张怀捷, 马静雅, 刘浩源, 郭品, 邓慧超, 徐坤, 丁希仑. 视觉与惯性融合的多旋翼飞行机器人室内定位技术[J]. 航空学报, 2023, 44(5): 426964-426964. |
| [2] | 宋亚辉, 樊高宇, 瞿丽霞, 张跃林, 徐悦, 韩硕. 航空器声爆飞行试验测量技术研究进展[J]. 航空学报, 2023, 44(2): 626186-626186. |
| [3] | 王平, 付辉, 徐贵力. 基于旋转搜索的相机位姿估计和对应点匹配[J]. 航空学报, 2023, 44(2): 326695-326695. |
| [4] | 张刘, 黄勇, 陈辅政, 朱正龙, 郭天豪, 姜裕标, 周铸. 基于环量控制的无尾飞翼俯仰和滚转两轴无舵面姿态控制飞行试验[J]. 航空学报, 2023, 44(18): 128224-128224. |
| [5] | 刘博, 孟中杰. 软管连接约束下的加油机/无人机编队跟踪控制[J]. 航空学报, 2023, 44(17): 328210-328210. |
| [6] | 丁军亮, 赵利利, 杨涛, 张海妮, 申晓霞. 自然结冰飞行试验技术综述[J]. 航空学报, 2023, 44(17): 28270-028270. |
| [7] | 章胜, 周攀, 何扬, 黄江涛, 刘刚, 唐骥罡, 贾怀智, 杜昕. 基于深度强化学习的空战机动决策试验[J]. 航空学报, 2023, 44(10): 128094-128094. |
| [8] | 邵帅, 郭正, 贾高伟, 陈清阳, 侯中喜, 张来平. 中等展弦比飞翼布局无人机后缘射流滚转控制[J]. 航空学报, 2023, 44(10): 127437-127437. |
| [9] | 赵鲲, 梁俊彪, Ivan BELYAEV, Victor KOPIEV, Gareth BENNETT. 民用飞机起落架噪声及其控制技术研究进展[J]. 航空学报, 2022, 43(8): 26996-026996. |
| [10] | 岑飞, 刘志涛, 蒋永, 郭天豪, 张磊, 孔轶男. 民机极限飞行状态非定常气动力建模[J]. 航空学报, 2022, 43(8): 125582-125582. |
| [11] | 周宜涛, 杨阳, 吴志刚, 杨超. 大展弦比无人机平台的阵风减缓飞行试验[J]. 航空学报, 2022, 43(6): 526126-526126. |
| [12] | 陈广强, 豆国辉, 魏昊功, 邹昕, 李齐, 刘周, 周伟江. 火星探测器大气数据测量方法[J]. 航空学报, 2022, 43(3): 626619-626619. |
| [13] | 王猛, 李玉军, 赵荣奂, 衷洪杰. 基于在线加热涂层的宽速域转捩探测技术[J]. 航空学报, 2022, 43(11): 526820-526820. |
| [14] | 周桢尧, 吕飞, 周斌, 杨钊. 自然层流减阻验证方法及验证翼段布局设计[J]. 航空学报, 2022, 43(11): 526751-526751. |
| [15] | 王浩, 钟敏, 华俊, 钟海, 杨体浩, 王猛, 雷国东. 自然层流飞行测试翼套的仿真和试验[J]. 航空学报, 2022, 43(11): 526785-526785. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学