李卫华1( ), 郭军龙1, 丁亮2, 高海波2
), 郭军龙1, 丁亮2, 高海波2
收稿日期:2021-09-07
修回日期:2021-10-09
接受日期:2022-01-25
出版日期:2023-01-15
发布日期:2022-02-28
通讯作者:
李卫华
E-mail:liweihua@hit.edu.cn
基金资助:
Weihua LI1(), Junlong GUO1, Liang DING2, Haibo GAO2
Received:2021-09-07
Revised:2021-10-09
Accepted:2022-01-25
Online:2023-01-15
Published:2022-02-28
Contact:
Weihua LI
E-mail:liweihua@hit.edu.cn
Supported by:摘要:
针对月球车在地球-月球大通信时延、月表复杂环境下的地面遥操作技术进行了分析,回顾了苏联、美国、中国已成功发射月球车的控制技术或者远程控制技术现状。为了解决当前月球车采用的“移动-等待”模式低效率难点,结合地面轮式移动机械臂在运动学约束、小时延、多自由度映射等方面的技术现状,从通信时延及时延补偿策略、月表松软月壤带来的纵向/侧向滑动、机器人遥操作理论等3个方面,对月球车进行连续遥操作所面临的关键技术进行了梳理。最后,对未来月球探测工程中的月球车地面遥操作技术发展方向进行了展望。
中图分类号:
李卫华, 郭军龙, 丁亮, 高海波. 月球车地面遥操作技术发展现状与未来展望[J]. 航空学报, 2023, 44(1): 26333-026333.
Weihua LI, Junlong GUO, Liang DING, Haibo GAO. State of art and prospects of ground teleoperation technology for lunar rover[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 26333-026333.

图1
Lunokhod-1与Lunokhod-2月球车遥操作框图[9]

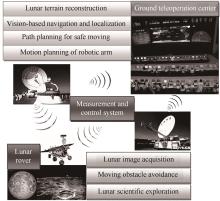
图2
“玉兔号”月球车遥操作系统示意图[11]
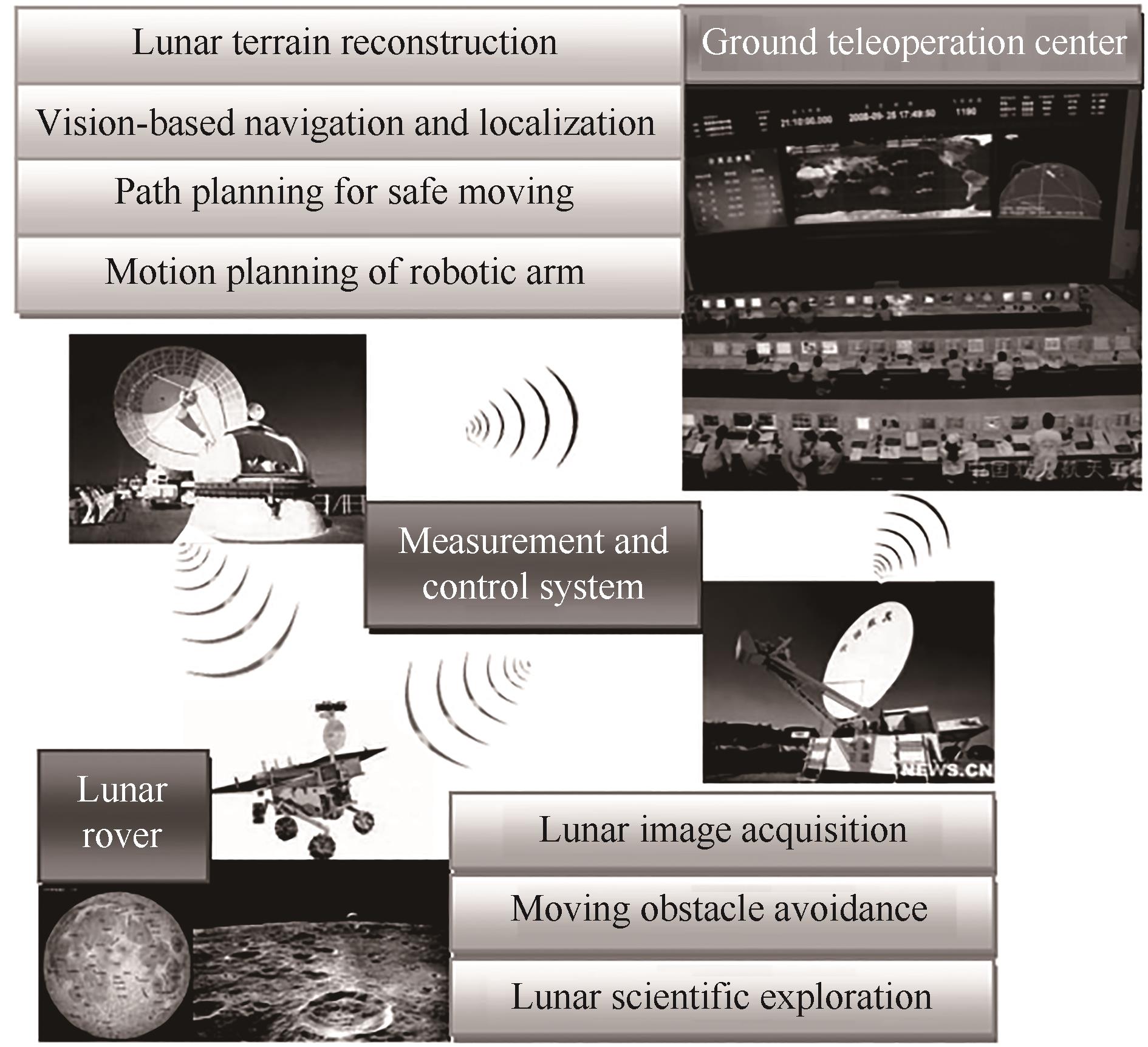

图3
航天员在轨遥操作地面K10漫游车[14]
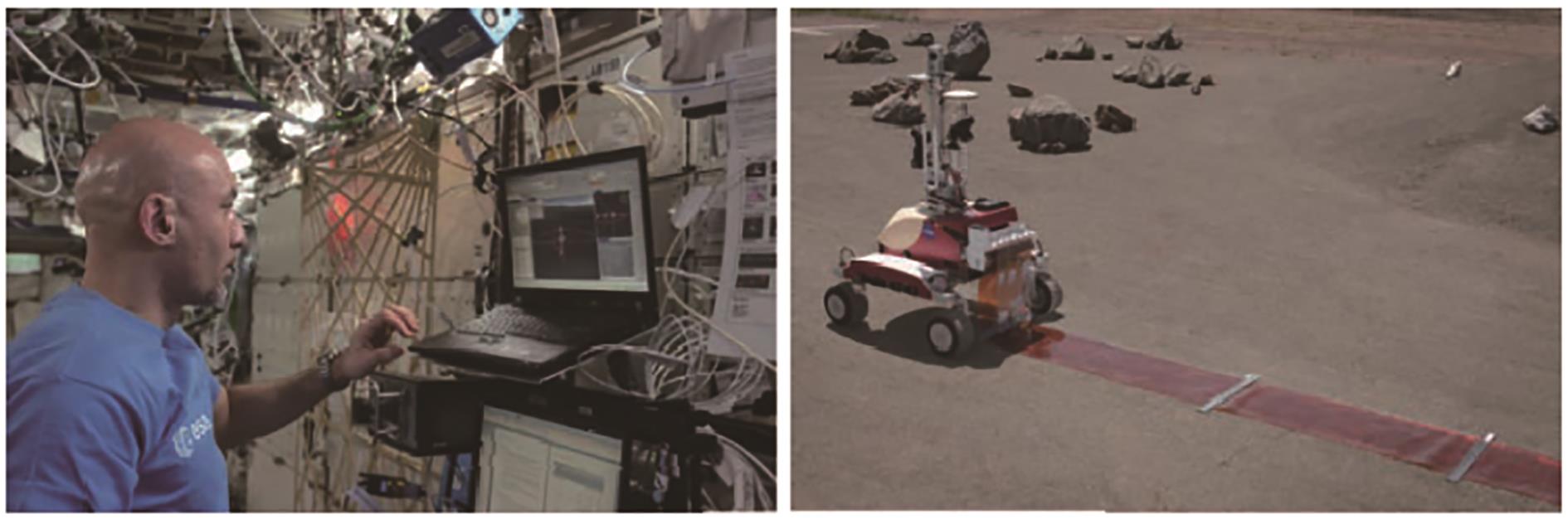
表1
3种遥操作模式性能对比
| 操作模式 | 通信时延/s | 指令生成 | 操作方式 | 效率 | 安全性 |
|---|---|---|---|---|---|
| 地面 | 3~10 | 离线 | 移动-等待 | 低 | 较高 |
地面+ 器上自主 | 3~10 | 离线+ 局部自主 | 移动-等待 | 中 | 高 |
| 在轨 | <2 | 在线 | 连续 | 高 | 较高 |

图4
机器人双边连续遥操作系统框图[16]


图5
轮式移动机器人遥操作示意图[17]
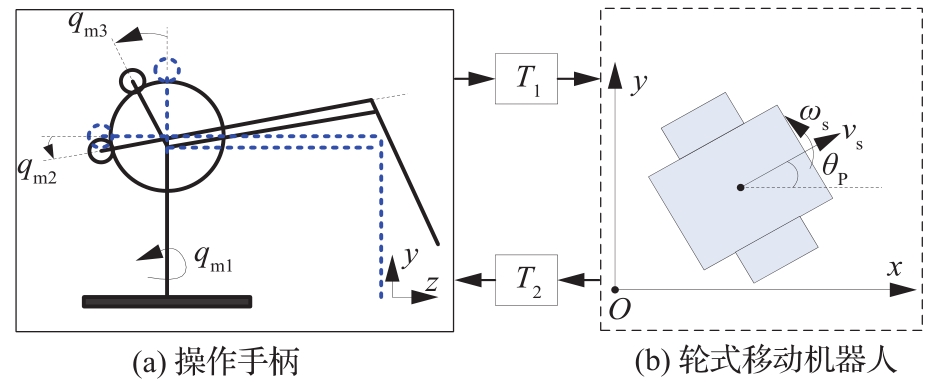

图6
轮式移动机器人双边遥操作系统框图[17]
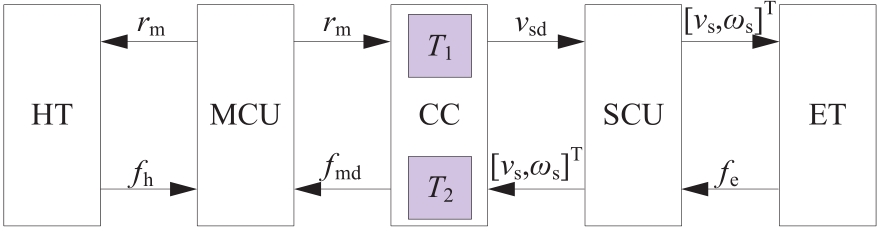
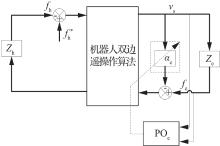
图7
采用TDPC的机器人双边遥操作系统框图[25]


图8
德国宇航中心星球探测用移动机械臂[35]
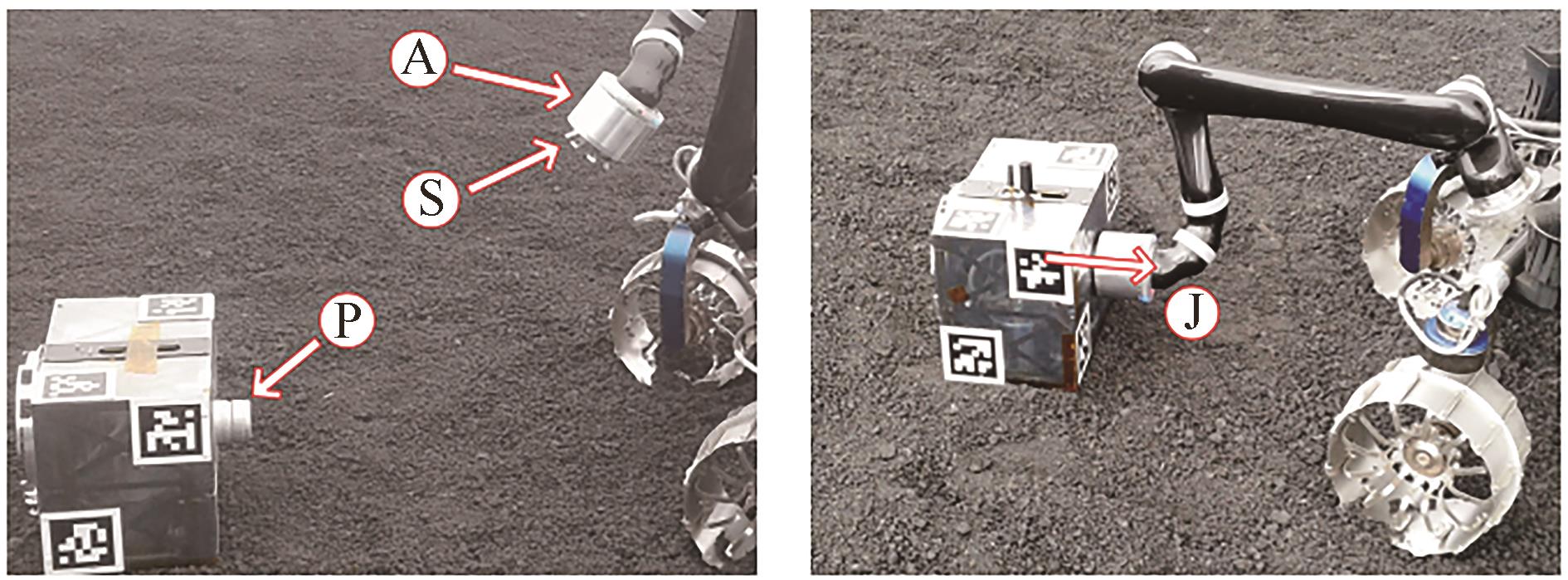
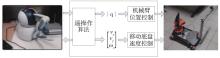
图9
移动机械臂位置-速度混合遥操作[36]


图10
单-双操作者对比示意图[39]


图11
波变换示意图[47]
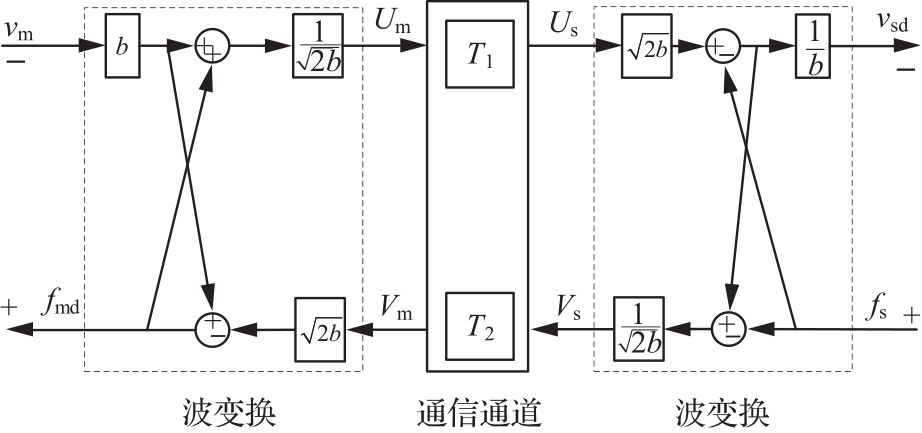

图12
ROSTDyn仿真平台[72]
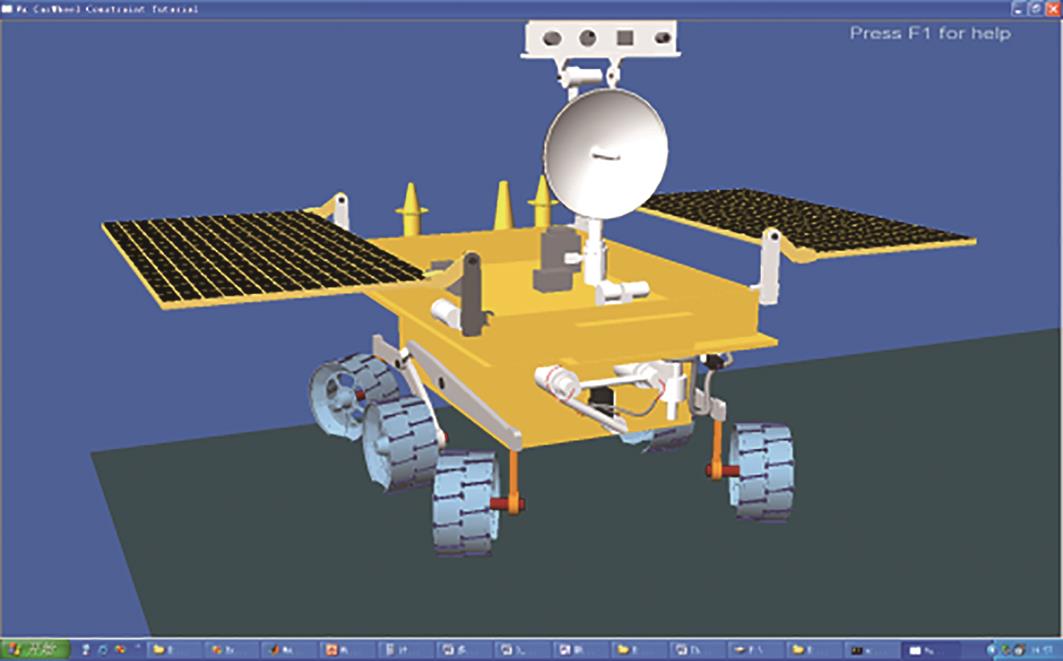

图13
月球车曲线行走与原地转弯规划仿真[80]


图14
基于数据驱动的三边共享遥操作架构[16]
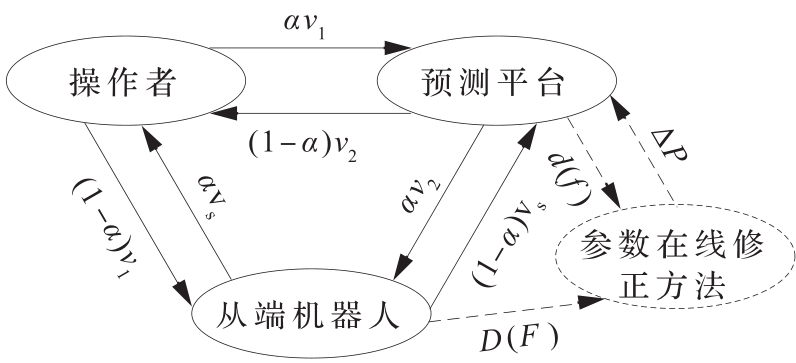
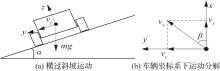
图15
月球车侧向运动示意图
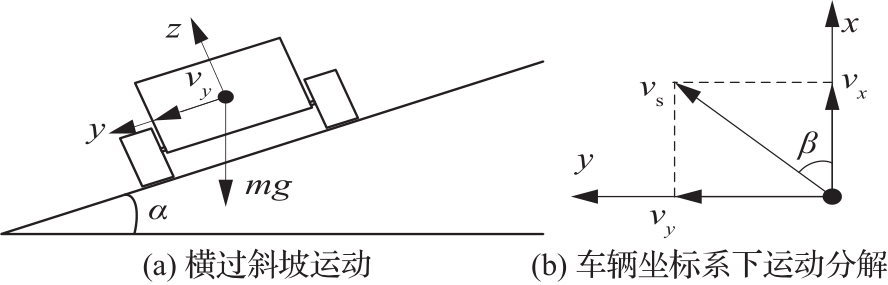
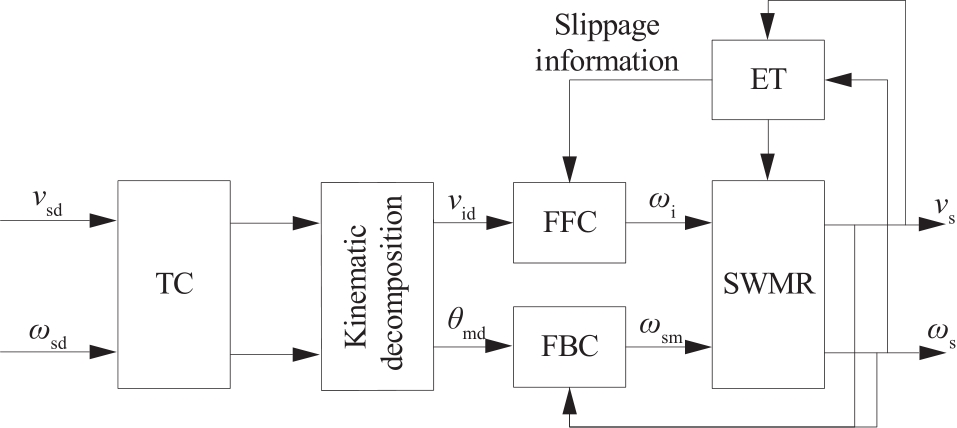
图16
六轮月球车遥操作控制框图[86]
| 1 | 徐西宝, 白成超, 陈宇燊, 等. 月/火探测软着陆制导技术发展综述[J]. 宇航学报, 2020, 41(6): 719-729. |
| XU X B, BAI C C, CHEN Y S, et al. A survey of guidance technology for moon/Mars soft landing[J]. Journal of Astronautics, 2020, 41(6): 719-729 (in Chinese). | |
| 2 | 李春来, 刘建军, 左维, 等. 中国月球探测进展(2011—2020年)[J]. 空间科学学报, 2021, 41(1): 68-75. |
| LI C L, LIU J J, ZUO W, et al. Progress of China’s lunar exploration(2011-2020)[J]. Chinese Journal of Space Science, 2021, 41(1): 68-75 (in Chinese). | |
| 3 | TEAM R. Characterization of the Martian surface deposits by the Mars Pathfinder rover, Sojourner[J]. Science, 1997, 278(5344): 1765-1768. |
| 4 | HUNTRESS W T, MAROV M Y. Soviet robots in the solar system: Mission technologies and discoveries[M]. New York: Springer, 2011. |
| 5 | LI C L, WANG C, WEI Y, et al. China’s present and future lunar exploration program[J]. Science, 2019, 365(6450): 238-239. |
| 6 | 吴伟仁, 于登云, 王赤, 等. 嫦娥四号工程的技术突破与科学进展[J]. 中国科学: 信息科学, 2020, 50(12): 1783-1797. |
| WU W R, YU D Y, WANG C, et al. Technological breakthrough and scientific achievement of Chang’e-4 project[J]. Scientia Sinica (Informationis), 2020, 50(12): 1783-1797 (in Chinese). | |
| 7 | PEI Z Y, REN J J, PENG J, et al. Overall scheme trade-off design of Chang’E-5 mission[J]. Journal of Deep Space Exploration, 2021, 8(3): 215-226. |
| 8 | BASILEVSKY A T, KRESLAVSKY M A, KARACHEVTSEVA I P, et al. Morphometry of small impact craters in the Lunokhod-1 and Lunokhod-2 study areas[J]. Planetary and Space Science, 2014, 92: 77-87. |
| 9 | MALENKOV M. Self-propelled automatic chassis of Lunokhod-1: History of creation in episodes[J]. Frontiers of Mechanical Engineering, 2016, 11(1): 60-86. |
| 10 | 杨成, 宋军, 孙军, 等. 月球车实时遥操作方法研究[J]. 中国科学: 信息科学, 2014, 44(4): 461-472. |
| YANG C, SONG J, SUN J, et al. On real-time teleoperation of lunar rover[J]. Scientia Sinica (Informationis), 2014, 44(4): 461-472 (in Chinese). | |
| 11 | 吴伟仁, 周建亮, 王保丰, 等. 嫦娥三号“玉兔号”巡视器遥操作中的关键技术[J]. 中国科学: 信息科学, 2014, 44(4): 425-440. |
| WU W R, ZHOU J L, WANG B F, et al. Key technologies in the teleoperation of Chang’E-3 “Jade Rabbit” rover[J]. Scientia Sinica (Informationis), 2014, 44(4): 425-440 (in Chinese). | |
| 12 | 张立宪, 肖广洲, 王东哲, 等. 在轨对星球表面遥操作技术现状与展望[J]. 中国科学: 技术科学, 2020, 50(6): 716-728. |
| ZHANG L X, XIAO G Z, WANG D Z, et al. Review and prospects of orbit-to-surface teleoperation[J]. Scientia Sinica (Technologica), 2020, 50(6): 716-728 (in Chinese). | |
| 13 | LII N Y, LEIDNER D, BIRKENKAMPF P, et al. Toward scalable intuitive telecommand of robots for space deployment with the METERON SUPVIS Justin experiment [C]∥The 14th Symposium on Advanced Space Technologies for Robotics and Automation. Leiden: European Space Agency, 2017. |
| 14 | BURNS J O, MELLINKOFF B, SPYDELL M, et al. Science on the lunar surface facilitated by low latency telerobotics from a Lunar Orbital Platform-Gateway[J]. Acta Astronautica, 2019, 154: 195-203. |
| 15 | WEBER B, BALACHANDRAN R, RIECKE C, et al. Teleoperating robots from the international space station: Microgravity effects on performance with force feedback[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2019: 8144-8150. |
| 16 | 李卫华. 轮式移动机器人滑转率预测及遥操作技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2016. |
| LI W H. Research on slippage prediction and teleoperation of wheeled mobile robots[D]. Harbin: Harbin Institute of Technology, 2016 (in Chinese). | |
| 17 | LI W H, DING L, LIU Z, et al. Kinematic bilateral teledriving of wheeled mobile robots coupled with slippage[J]. IEEE Transactions on Industrial Electronics, 2017, 64(3): 2147-2157. |
| 18 | LEE D J, MARTINEZ-PALAFOX O, SPONG M W. Bilateral teleoperation of a wheeled mobile robot over delayed communication network[C]∥Proceedings 2006 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2006: 3298-3303. |
| 19 | 李振才. 松软地形下六轮星球车运动建模及跟踪控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| LI Z C. Research on motion modelling and tracking control of six-wheeled planetary rover on soft terrain[D]. Harbin: Harbin Institute of Technology, 2018 (in Chinese). | |
| 20 | LUO J, LIN Z D, LI Y N, et al. A teleoperation framework for mobile robots based on shared control[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 377-384. |
| 21 | QUANG H V, FARKHATDINOV I, RYU J H. Passivity of delayed bilateral teleoperation of mobile robots with ambiguous causalities: Time domain passivity approach[C]∥2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2012: 2635-2640. |
| 22 | MALYSZ P, SIROUSPOUR S. A task-space weighting matrix approach to semi-autonomous teleoperation control[C]∥2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2011: 645-652. |
| 23 | YUAN W, LI Z J. Brain teleoperation control of a nonholonomic mobile robot using quadrupole potential function[J]. IEEE Transactions on Cognitive and Developmental Systems, 2019, 11(4): 527-538. |
| 24 | 赵素娜. 脑控非完整移动机器人方法研究[D]. 广州: 华南理工大学, 2017. |
| ZHAO S N. Studies on brain-actuated methods for nonholonomic mobile robots[D]. Guangzhou: South China University of Technology, 2017 (in Chinese). | |
| 25 | LI W H, LIU Z, GAO H B, et al. Stable kinematic teleoperation of wheeled mobile robots with slippage using time-domain passivity control[J]. Mechatronics, 2016, 39: 196-203. |
| 26 | HUANG Y J, DING H T, ZHANG Y B, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2): 1376-1386. |
| 27 | 马小陆, 梅宏. 基于改进势场蚁群算法的移动机器人全局路径规划[J]. 机械工程学报, 2021, 57(1): 19-27. |
| MA X L, MEI H. Mobile robot global path planning based on improved ant colony system algorithm with potential field[J]. Journal of Mechanical Engineering, 2021, 57(1): 19-27 (in Chinese). | |
| 28 | DU G L, HAN R G, YAO G C, et al. A gesture- and speech-guided robot teleoperation method based on mobile interaction with unrestricted force feedback[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(1): 360-371. |
| 29 | 袁祖龙, 李会军, 宋爱国, 等. 基于视觉/力觉辅助的遥操作系统研究与实现[J]. 测控技术, 2018, 37(6): 112-116. |
| YUAN Z L, LI H J, SONG A G, et al. Research and implementation of teleoperation system based on visual-haptic aid[J]. Measurement & Control Technology, 2018, 37(6): 112-116 (in Chinese). | |
| 30 | FRANCHI A, SECCHI C, SON H I, et al. Bilateral teleoperation of groups of mobile robots with time-varying topology[J]. IEEE Transactions on Robotics, 2012, 28(5): 1019-1033. |
| 31 | 张颖, 宋光明, 孙慧玉, 等. 多移动机器人双边遥操作系统中反馈力信息设计与研究[J]. 东南大学学报(自然科学版), 2017, 47(1): 50-55. |
| ZHANG Y, SONG G M, SUN H Y, et al. Design and research on feedback force in bilateral teleoperation system for multiple mobile robots[J]. Journal of Southeast University (Natural Science Edition), 2017, 47(1): 50-55 (in Chinese). | |
| 32 | QIU Y, LI B Q, SHI W X, et al. Visual servo tracking of wheeled mobile robots with unknown extrinsic parameters[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8600-8609. |
| 33 | CUI M Y, HUANG R J, LIU H Z, et al. Adaptive tracking control of wheeled mobile robots with unknown longitudinal and lateral slipping parameters[J]. Nonlinear Dynamics, 2014, 78(3): 1811-1826. |
| 34 | 冷舒, 居鹤华. 行星车动力学建模及解算方法综述[J]. 清华大学学报(自然科学版), 2019, 59(9): 689-698. |
| LENG S, JU H H. Review of rover dynamics modeling methods[J]. Journal of Tsinghua University (Science and Technology), 2019, 59(9): 689-698 (in Chinese). | |
| 35 | LEHNER P, BRUNNER S, DÖMEL A, et al. Mobile manipulation for planetary exploration[C]∥2018 IEEE Aerospace Conference. Piscataway: IEEE Press, 2018: 1-11. |
| 36 | PEPE A, CHIARAVALLI D, MELCHIORRI C. A hybrid teleoperation control scheme for a single-arm mobile manipulator with omnidirectional wheels[C]∥2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2016: 1450-1455. |
| 37 | GARCIA M A R, ROJAS R A, PIRRI F. Object-centered teleoperation of mobile manipulators with remote center of motion constraint[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 1745-1752. |
| 38 | WU Y Q, BALATTI P, LORENZINI M, et al. A teleoperation interface for loco-manipulation control of mobile collaborative robotic assistant[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3593-3600. |
| 39 | MALYSZ P, SIROUSPOUR S. Task performance evaluation of asymmetric semiautonomous teleoperation of mobile twin-arm robotic manipulators[J]. IEEE Transactions on Haptics, 2013, 6(4): 484-495. |
| 40 | ZHAI D H, XIA Y Q. Adaptive fuzzy control of multilateral asymmetric teleoperation for coordinated multiple mobile manipulators[J]. IEEE Transactions on Fuzzy Systems, 2016, 24(1): 57-70. |
| 41 | SHAHBAZI M, ATASHZAR S F, PATEL R V. A systematic review of multilateral teleoperation systems[J]. IEEE Transactions on Haptics, 2018, 11(3): 338-356. |
| 42 | 李文皓, 张珩, 冯冠华. 复杂大时延的多主多从共享遥操作方法[J]. 航空学报, 2021, 42(1): 523896. |
| LI W H, ZHANG H, FENG G H. Cooperative teleoperation for multi-master/multi-slave systems with large time-varying delays[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523896 (in Chinese). | |
| 43 | ISHIGAMI G, MIWA A, NAGATANI K, et al. Terramechanics-based model for steering maneuver of planetary exploration rovers on loose soil[J]. Journal of Field Robotics, 2007, 24(3): 233-250. |
| 44 | GUO J L, LI W H, DING L, et al. Linear expressions of drawbar pull and driving torque for grouser-wheeled planetary rovers without terrain mechanical parameters[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8197-8204. |
| 45 | OLSON C F, MATTHIES L H, SCHOPPERS M, et al. Rover navigation using stereo ego-motion[J]. Robotics and Autonomous Systems, 2003, 43(4): 215-229. |
| 46 | ANDERSON R J, SPONG M W. Bilateral control of teleoperators with time delay[J]. IEEE Transactions on Automatic Control, 1989, 34(5): 494-501. |
| 47 | NIEMEYER G, SLOTINE J J E. Telemanipulation with time delays[J]. The International Journal of Robotics Research, 2004, 23(9): 873-890. |
| 48 | PITAKWATCHARA P. Wave correction scheme for task space control of time-varying delayed teleoperation systems[J]. IEEE Transactions on Control Systems Technology, 2018, 26(6): 2223-2231. |
| 49 | 吴超, 宋荆洲. 基于波变量的时域无源双边遥操作控制方法研究[J]. 载人航天, 2020, 26(6): 767-776, 782. |
| WU C, SONG J Z. Research on time domain passive bilateral teleoperation control method based on wave variable[J]. Manned Spaceflight, 2020, 26(6): 767-776, 782 (in Chinese). | |
| 50 | HANNAFORD B. A design framework for teleoperators with kinesthetic feedback[J]. IEEE Transactions on Robotics and Automation, 1989, 5(4): 426-434. |
| 51 | TSUMAKI Y, UCHIYAMA M. Predictive display of virtual beam for space teleoperation[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 1996: 1544-1549. |
| 52 | SMITH C, JENSFELT P. A predictor for operator input for time-delayed teleoperation[J]. Mechatronics, 2010, 20(7): 778-786. |
| 53 | 张波, 李海阳, 唐国金. 环月轨道遥操作交会对接预测共享控制[J]. 宇航学报, 2014, 35(3): 315-323. |
| ZHANG B, LI H Y, TANG G J. Predictive shared control of teleoperation rendezvous and docking in lunar orbit[J]. Journal of Astronautics, 2014, 35(3): 315-323 (in Chinese). | |
| 54 | HIRZINGER G, LANDZETTEL K, FAGERER C. Telerobotics with large time delays-the ROTEX experience[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’94). Piscataway: IEEE Press, 1994: 571-578. |
| 55 | 倪得晶, 宋爱国, 李会军. 基于虚拟现实的机器人遥操作关键技术研究[J]. 仪器仪表学报, 2017, 38(10): 2351-2363. |
| NI D J, SONG A G, LI H J. Survey on robot teleoperation based on virtual reality[J]. Chinese Journal of Scientific Instrument, 2017, 38(10): 2351-2363 (in Chinese). | |
| 56 | HADDADI A, HASHTRUDI-ZAAD K. Real-time identification of hunt-crossley dynamic models of contact environments[J]. IEEE Transactions on Robotics, 2012, 28(3): 555-566. |
| 57 | 倪得晶. 面向空间机器人遥操作的环境建模与人机交互技术研究[D]. 南京: 东南大学, 2018. |
| NI D J. Research on technology of environment modelling and human-robot interaction for space robot teleoperation[D]. Nanjing: Southeast University, 2018 (in Chinese). | |
| 58 | WALACH E, WIDROW B. The least mean fourth (LMF) adaptive algorithm and its family[J]. IEEE Transactions on Information Theory, 1984, 30(2): 275-283. |
| 59 | YAMAMOTO T, BERNHARDT M, PEER A, et al. Techniques for environment parameter estimation during telemanipulation[C]∥2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Piscataway: IEEE Press, 2008: 217-223. |
| 60 | SERAJI H, COLBAUGH R. Force tracking in impedance control[J]. International Journal of Robotics Research, 1997, 16(1): 97-117. |
| 61 | DIOLAITI N, MELCHIORRI C, STRAMIGIOLI S. Contact impedance estimation for robotic systems[J]. IEEE Transactions on Robotics, 2005, 21(5): 925-935. |
| 62 | GAO H B, LI W H, DING L, et al. A method for on-line soil parameters modification to planetary rover simulation[J]. Journal of Terramechanics, 2012, 49(6): 325-339. |
| 63 | SU H, QI W, YANG C G, et al. Deep neural network approach in robot tool dynamics identification for bilateral teleoperation[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2943-2949. |
| 64 | BEKKER M G. Introduction to terrain-vehicle systems[M]. Ann Arbor: University of Michigan Press, 1969 |
| 65 | JANOSI Z, HANAMOTO B. Analytical determination of drawbar pull as a function of slip for tracked vehicle in deformable soils[C]∥Proceedings of the 1st International Conference of ISTVES, 1961: 707-726. |
| 66 | SENATORE C, IAGNEMMA K. Analysis of stress distributions under lightweight wheeled vehicles[J]. Journal of Terramechanics, 2014, 51: 1-17. |
| 67 | AGARWAL S, SENATORE C, ZHANG T N, et al. Modeling of the interaction of rigid wheels with dry granular media[J]. Journal of Terramechanics, 2019, 85: 1-14. |
| 68 | 丁亮. 月/星球车轮地作用地面力学模型及其应用研究[D]. 哈尔滨: 哈尔滨工业大学, 2010. |
| DING L. Wheel-soil interaction terramechanics for lunar/planetary exploration rovers: Modeling and application[D]. Harbin: Harbin Institute of Technology, 2010 (in Chinese). | |
| 69 | SOHL G, JAIN A. Wheel-terrain contact modeling in the ROAMS planetary rover simulation[C]∥Proceedings of ASME 2005 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 2008: 89-97. |
| 70 | PATEL N, ELLERY A, ALLOUIS E, et al. Rover mobility performance evaluation tool (RMPET): A systematic tool for rover chassis evaluation via application of bekker theory [C]∥The 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation. Noordwijk: European Space Agency, 2004: 1-9. |
| 71 | 陈百超. 月球车新型移动系统设计[D]. 长春: 吉林大学, 2009. |
| CHEN B C. Design of a new locomotion system for lunar rover[D]. Changchun: Jilin University, 2009 (in Chinese). | |
| 72 | LI W H, DING L, GAO H B, et al. ROSTDyn: Rover simulation based on terramechanics and dynamics[J]. Journal of Terramechanics, 2013, 50(3): 199-210. |
| 73 | IAGNEMMA K, KANG S, SHIBLY H, et al. Online terrain parameter estimation for wheeled mobile robots with application to planetary rovers[J]. IEEE Transactions on Robotics, 2004, 20(5): 921-927. |
| 74 | HUTANGKABODEE S, ZWEIRI Y H, SENEVIRATNE L D, et al. Performance prediction of a wheeled vehicle on unknown terrain using identified soil parameters[C]∥Proceedings 2006 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2006: 3356-3361. |
| 75 | DING L, YOSHIDA K, NAGATANI K, et al. Parameter identification for planetary soil based on a decoupled analytical wheel-soil interaction terramechanics model[C]∥2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2009: 4122-4127. |
| 76 | LI W H, LIU Z, GAO H B, et al. Soil parameter modification used for boosting predictive fidelity of planetary rover’s slippage[J]. Journal of Terramechanics, 2014, 56: 173-184. |
| 77 | 陶飞, 刘蔚然, 刘检华, 等. 数字孪生及其应用探索[J]. 计算机集成制造系统, 2018, 24(1): 1-18. |
| TAO F, LIU W R, LIU J H, et al. Digital twin and its potential application exploration[J]. Computer Integrated Manufacturing Systems, 2018, 24(1): 1-18 (in Chinese). | |
| 78 | 孟松鹤, 叶雨玫, 杨强, 等. 数字孪生及其在航空航天中的应用[J]. 航空学报, 2020, 41(9): 023615. |
| MENG S H, YE Y M, YANG Q, et al. Digital twin and its aerospace applications[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): 023615 (in Chinese). | |
| 79 | 赵正旭. 非可及环境的镜像孪生与实时可视化遥操控[J]. 青岛理工大学学报, 2020, 41(6): 1-16, 60. |
| ZHAO Z X. Twin imaging and real-time visualized remote manipulating in inaccessible environments[J]. Journal of Qingdao University of Technology, 2020, 41(6): 1-16, 60 (in Chinese). | |
| 80 | 金晟毅, 李海飞, 彭松, 等. 嫦娥四号巡视器遥操作地面支持系统设计[J]. 航天器工程, 2019, 28(4): 116-124. |
| JIN S Y, LI H F, PENG S, et al. Design of tele-operation ground support system for Chang’e-4 rover[J]. Spacecraft Engineering, 2019, 28(4): 116-124 (in Chinese). | |
| 81 | 金晟毅, 邓湘金, 郑燕红, 等. 月面采样封装操控系统方案设计与实现[J]. 中国科学: 技术科学, 2021, 51(8): 912-920. |
| JIN S Y, DENG X J, ZHENG Y H, et al. Design and implementation of an operation system for lunar surface soil sampling & encapsulation[J]. Scientia Sinica (Technologica), 2021, 51(8): 912-920 (in Chinese). | |
| 82 | 刘潇翔, 汤亮, 曾海波, 等. 航天控制系统基于数字孪生的智慧设计仿真[J]. 系统仿真学报, 2019, 31(3): 377-384. |
| LIU X X, TANG L, ZENG H B, et al. Smart design and simulation of aerospace control system based on digital twin[J]. Journal of System Simulation, 2019, 31(3): 377-384 (in Chinese). | |
| 83 | LI W H, GAO H B, DING L, et al. Trilateral predictor-mediated teleoperation of a wheeled mobile robot with slippage[J]. IEEE Robotics and Automation Letters, 2016, 1(2): 738-745. |
| 84 | LI W H, YANG N, WANG J F, et al. Kinematic teleoperation of wheeled mobile robot with slippage compensation on soft terrains[J]. IEEE Access, 2019,7: 110982-110991. |
| 85 | LI W H, GUO J L, DING L, et al. Slippage-dependent teleoperation of wheeled mobile robots on soft terrains[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4962-4969. |
| 86 | LI W H, LI Z C, LIU Y Q, et al. Semi-autonomous bilateral teleoperation of six-wheeled mobile robot on soft terrains[J]. Mechanical Systems and Signal Processing, 2019, 133: 106234. |
| 87 | 梁振杰, 江磊, 苏波, 等. 人机共融机器人的月面驻留服务及应用展望[J]. 载人航天, 2019, 25(5): 680-687. |
| LIANG Z J, JIANG L, SU B, et al. Lunar residence service and application prospect of tri-Co robot[J]. Manned Spaceflight, 2019, 25(5): 680-687 (in Chinese). |
| [1] | 李博, 王潇. 共轴双旋翼/尾推桨/传动耦合系统动力学建模与固有特性分析[J]. 航空学报, 2024, 45(9): 528945-528945. |
| [2] | 聂博文, 王亮权, 黄志银, 何龙, 杨仕鹏, 颜鸿涛, 章贵川. 复合式高速无人直升机飞行动力学建模与控制策略设计[J]. 航空学报, 2024, 45(9): 529848-529848. |
| [3] | 周洪淼, 于剑桥, 于勇. 敏捷转弯伞弹系统动力学建模与分岔特性分析[J]. 航空学报, 2024, 45(7): 229012-229012. |
| [4] | 刘小川, 惠旭龙, 张欣玥, 白春玉, 闫亚斌, 李肖成, 牟让科. 典型民用飞机全机坠撞实验研究[J]. 航空学报, 2024, 45(5): 529664-529664. |
| [5] | 胡明辉, 高金吉, 江志农, 王维民, 邹利民, 周涛, 凡云峰, 王越, 冯家欣, 李晨阳. 航空发动机振动监测与故障诊断技术研究进展[J]. 航空学报, 2024, 45(4): 630194-630194. |
| [6] | 葛向东, 吴法勇, 刘永泉, 安中彦, 乔保栋, 高强, 秦天龙, 周笑阳. 航空发动机整机振动问题研究方法及工程应用[J]. 航空学报, 2024, 45(4): 628353-628353. |
| [7] | 朱清玉, 韩清凯, 王维民, 江志农. 航空发动机多支撑附件系统振动传递路径分析[J]. 航空学报, 2024, 45(4): 628303-628303. |
| [8] | 李帅, 李启行, 谌璨, 方志法, 王维民. 融合柔性基础传递函数的转子系统建模方法及验证[J]. 航空学报, 2024, 45(3): 229250-229250. |
| [9] | 司和勇, 王瑶俐, 曹丽华, 陈东超. 超临界二氧化碳涡轮升速过渡中密封-转子系统的动力学行为[J]. 航空学报, 2024, 45(2): 228652-228652. |
| [10] | 赵清风, 周洲, 李明浩, 徐德. 分布式动力翼-诱导翼面推进-气动耦合模型[J]. 航空学报, 2024, 45(10): 129252-129252. |
| [11] | 王四季, 张羽薇, 黄开明, 吕彪, 赵海凤, 王虎, 廖明夫. 基于改进粒子群算法的直升机动力涡轮转子系统优化方法[J]. 航空学报, 2024, 45(1): 228608-228608. |
| [12] | 张贺, 刘清扬, 李留刚, 许靖尧. 变构型飞行器多刚体非定常仿真技术[J]. 航空学报, 2023, 44(S2): 729421-729421. |
| [13] | 张程, 任浩源, 史泰龙, 戴雯迪. 含非线性连接的折叠舵全时域多学科耦合分析方法及应用[J]. 航空学报, 2023, 44(S2): 729461-729461. |
| [14] | 叶致凡, 赵瑾, 李志辉, 孙向春, 文东升. 基于气固界面热化学反应模型的热防护材料烧蚀过程多尺度耦合计算方法[J]. 航空学报, 2023, 44(S2): 729469-729469. |
| [15] | 喻世杰, 周兴华, 黄锐. 变弯度机翼参数化气动弹性建模与颤振特性分析[J]. 航空学报, 2023, 44(8): 227346-227346. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学