| 1 |
王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732.
|
|
WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732 (in Chinese).
|
| 2 |
BEARD R W, MCLAIN T W, NELSON D B, et al. Decentralized cooperative aerial surveillance using fixed-wing miniature UAVs[J]. Proceedings of the IEEE, 2006, 94(7): 1306-1324.
|
| 3 |
SU Z K, WANG X W, WANG H L, Neural-adaptive constrained flight control for air ground recovery under terrain obstacles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 58(1): 374-390.
|
| 4 |
SU Z K, LI C T, ZHEN Z Y. Anti-disturbance constrained control of the air recovery carrier via an integral barrier Lyapunov function[J]. Aerospace Science and Technology, 2020, 106: 106157.
|
| 5 |
宋怡然, 申超, 李东兵. 美国分布式低成本无人机集群研究进展[J]. 飞航导弹, 2016(8): 17-22.
|
|
SONG Y R, SHEN C, LI D B. Research progress of distributed low-cost UAV cluster in America[J]. Aerodynamic Missile Journal, 2016(8): 17-22 (in Chinese).
|
| 6 |
SUN L, BEARD R W, COLTON M B, et al. Dynamics and control of cable-drogue system in aerial recovery of micro air vehicles based on Gauss's principle[C]∥ Proceedings of the 2009 conference on American Control Conference. New York: ACM, 2009.
|
| 7 |
SU Z K, LI C T, LIU Y H. Anti-disturbance dynamic surface trajectory stabilization for the towed aerial recovery drogue under unknown airflow disturbances[J]. Mechanical Systems and Signal Processing, 2021, 150: 107342.
|
| 8 |
SMITH J, KUNZ D. Simulation of the dynamically coupled KC-135 tanker and flying boom: AIAA-2007-6711[R]. Reston: AIAA, 2007.
|
| 9 |
SMITH J, KUNZ D. Dynamic coupling of the KC-135 tanker and boom for modeling and simulation[J]. Journal of Aircraft, 2007, 44(3): 1034-1039.
|
| 10 |
薛建平, 陈博, 王小平. 空中加油伸缩套管控制研究[J]. 飞行力学, 2008, 26(4): 14-18.
|
|
XUE J P, CHEN B, WANG X P. Control law research on aerial refueling boom[J]. Flight Dynamics, 2008, 26(4): 14-18 (in Chinese).
|
| 11 |
高久安, 贾秋玲. 自动空中加油杆LQR控制器设计[J]. 电子设计工程, 2014, 22(2): 102-104.
|
|
GAO J A, JIA Q L. LQR controller design for boom air-refueling bar[J]. Electronic Design Engineering, 2014, 22(2): 102-104 (in Chinese).
|
| 12 |
李俊国. 蜂群式固定翼无人机空基回收系统设计及动力学分析[D]. 哈尔滨: 哈尔滨工业大学, 2017: 1-47.
|
|
LI J G. Design and dynamics analysis of air base recovery system for colony type fixed wing UAV[D]. Harbin: Harbin Institute of Technology, 2017: 1-47 (in Chinese).
|
| 13 |
姚来鹏, 侯保林, 刘曦. 采用摩擦补偿的弹药传输机械臂自适应终端滑模控制[J]. 上海交通大学学报, 2020, 54(2): 144-151.
|
|
YAO L P, HOU B L, LIU X. Adaptive terminal sliding mode control of a howitzer shell transfer arm with friction compensation[J]. Journal of Shanghai Jiao Tong University, 2020, 54(2): 144-151 (in Chinese).
|
| 14 |
FENG Y, YU X H, MAN Z H. Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38(12): 2159-2167.
|
| 15 |
ZAARE S, SOLTANPOUR M R. Adaptive fuzzy global coupled nonsingular fast terminal sliding mode control of n-rigid-link elastic-joint robot manipulators in presence of uncertainties[J]. Mechanical Systems and Signal Processing, 2022, 163: 108165.
|
| 16 |
何雪涛, 程源, 黄钟,等. 齐次坐标变换在空间机构分析中的应用[J]. 北京化工大学学报(自然科学版), 1999, 26(1): 41-44.
|
|
HE X T, CHENG Y, HUANG Z, et al. Transformation of homogeneous coordinates and its application in the analysis of spatial mechanism[J]. Journal of Beijing University of Chemical Technology (Natural Science Edition), 1999, 26(1): 41-44 (in Chinese).
|
| 17 |
王永超. 刚体转动惯量的质量投影法[J]. 大学物理, 2010, 29(9): 16-18, 29.
|
|
WANG Y C. The mass projection method of rigid body rotational inertia[J]. College Physics, 2010, 29(9): 16-18, 29 (in Chinese).
|
| 18 |
刘鹏, 王强, 张伟. 机械臂动力学建模及控制仿真[J]. 自动化与仪表, 2017, 32(3): 9-12.
|
|
LIU P, WANG Q, ZHANG W. Dynamics modeling and control simulation of manipulator[J]. Automation & Instrumentation, 2017, 32(3): 9-12 (in Chinese).
|
| 19 |
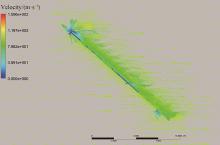
陈博, 董新民, 徐跃鉴, 等. 加油机尾流场建模与仿真分析[J]. 飞行力学, 2007, 25(4): 73-76.
|
|
CHEN B, DONG X M, XU Y J, et al. Modeling and simulation of the tanker's wake field[J]. Flight Dynamics, 2007, 25(4): 73-76 (in Chinese).
|
| 20 |
SU Z K, WANG H L, YAO P, et al. Back-stepping based anti-disturbance flight controller with preview methodology for autonomous aerial refueling[J]. Aerospace Science and Technology, 2017, 61: 95-108.
|
| 21 |
王福军. 计算流体动力学分析CFD软件原理与应用[M]. 北京: 清华大学出版社, 2004: 1-272.
|
|
WANG F J. Computational fluid dynamics analysis: Principle and application of CFD software[M]. Beijing: Tsinghua University Press, 2004: 1-272 (in Chinese).
|
| 22 |
UMENO T, HORI Y. Robust speed control of DC servomotors using modern two degrees-of-freedom controller design[J]. IEEE Transactions on Industrial Electronics, 1991, 38(5): 363-368.
|
| 23 |
UTKIN V. Variable structure systems with sliding modes[J]. IEEE Transactions on Automatic Control, 1977, 22(2): 212-222.
|
| 24 |
SU Z K, WANG H L, LI N. Anti-disturbance rapid vibration suppression of the flexible aerial refueling hose[J]. Mechanical Systems and Signal Processing, 2018, 104: 87-105.
|
| 25 |
YU S H, YU X H, SHIRINZADEH B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964.
|
| 26 |
ZUO Z Y. Non-singular fixed-time terminal sliding mode control of non-linear systems[J]. IET Control Theory and Applications, 2015, 9(4): 545-552.
|
| 27 |
ZHANG T, ZHANG M H, ZOU Y B. Time-optimal and smooth trajectory planning for robot manipulators[J]. International Journal of Control, Automation and Systems, 2021, 19(1): 521-531.
|
| 28 |
韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23.
|
|
HAN J Q. Auto-disturbances-rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 19-23 (in Chinese).
|
 ), 徐忠楠1, 李春涛1, 陈海通1, 王宏伦2
), 徐忠楠1, 李春涛1, 陈海通1, 王宏伦2