Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (4): 332264.doi: 10.7527/S1000-6893.2025.32264
• Electronics and Electrical Engineering and Control • Previous Articles
Zicheng FENG1,2, Wenlong ZHANG1,2( ), Donghui LIU1,2, Qifeng YU1,2
), Donghui LIU1,2, Qifeng YU1,2
Received:2025-05-20
Revised:2025-07-14
Accepted:2025-08-19
Online:2025-09-08
Published:2025-09-05
Contact:
Wenlong ZHANG
E-mail:wenlong@nudt.edu.cn
Supported by:CLC Number:
Zicheng FENG, Wenlong ZHANG, Donghui LIU, Qifeng YU. Robust infrared target tracking algorithm for anti-UAV in complexbackgrounds[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332264.
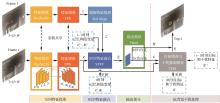
Fig.1
Overall framework of robust infrared UAV tracking algorithm
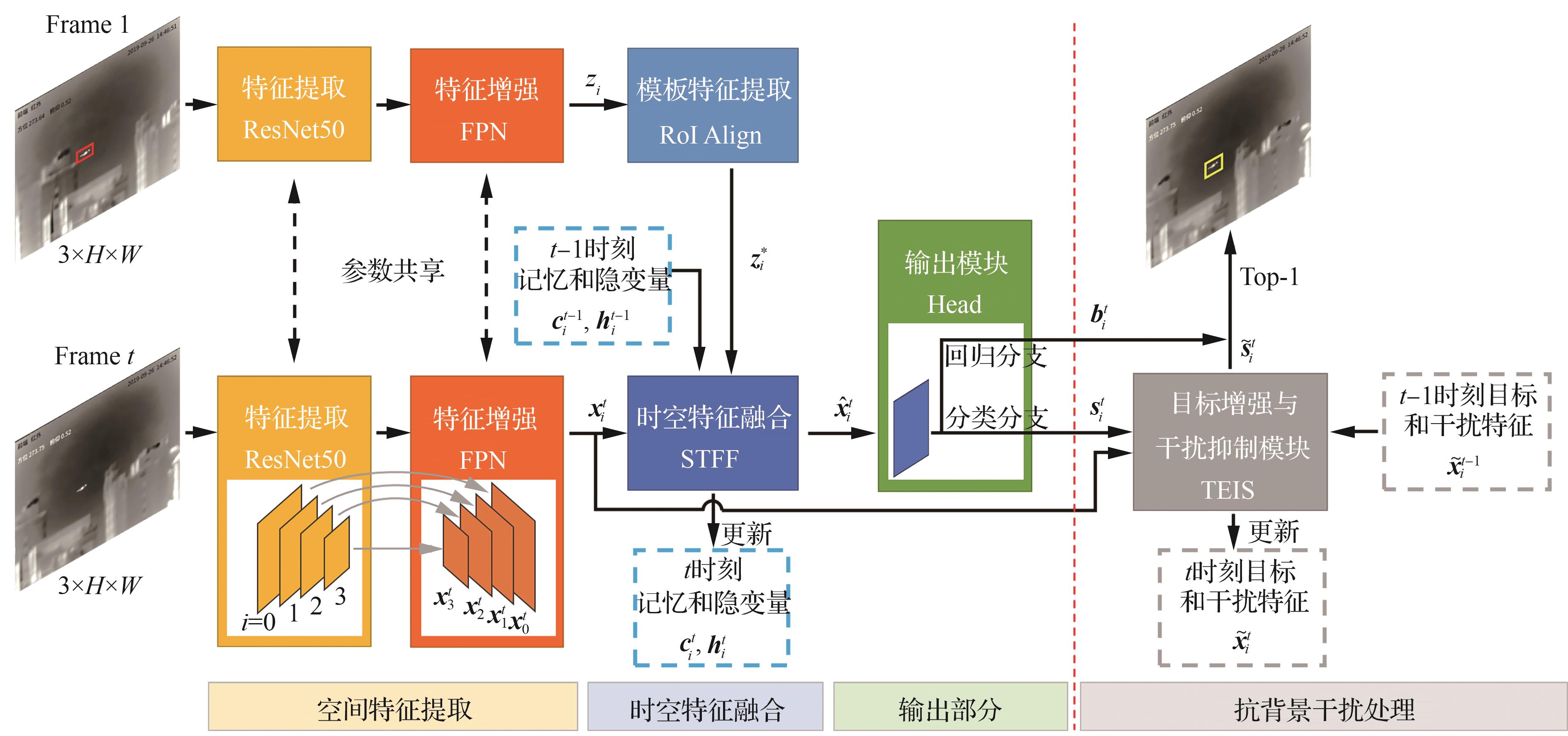

Fig.2
Spatio-temporal feature fusion module
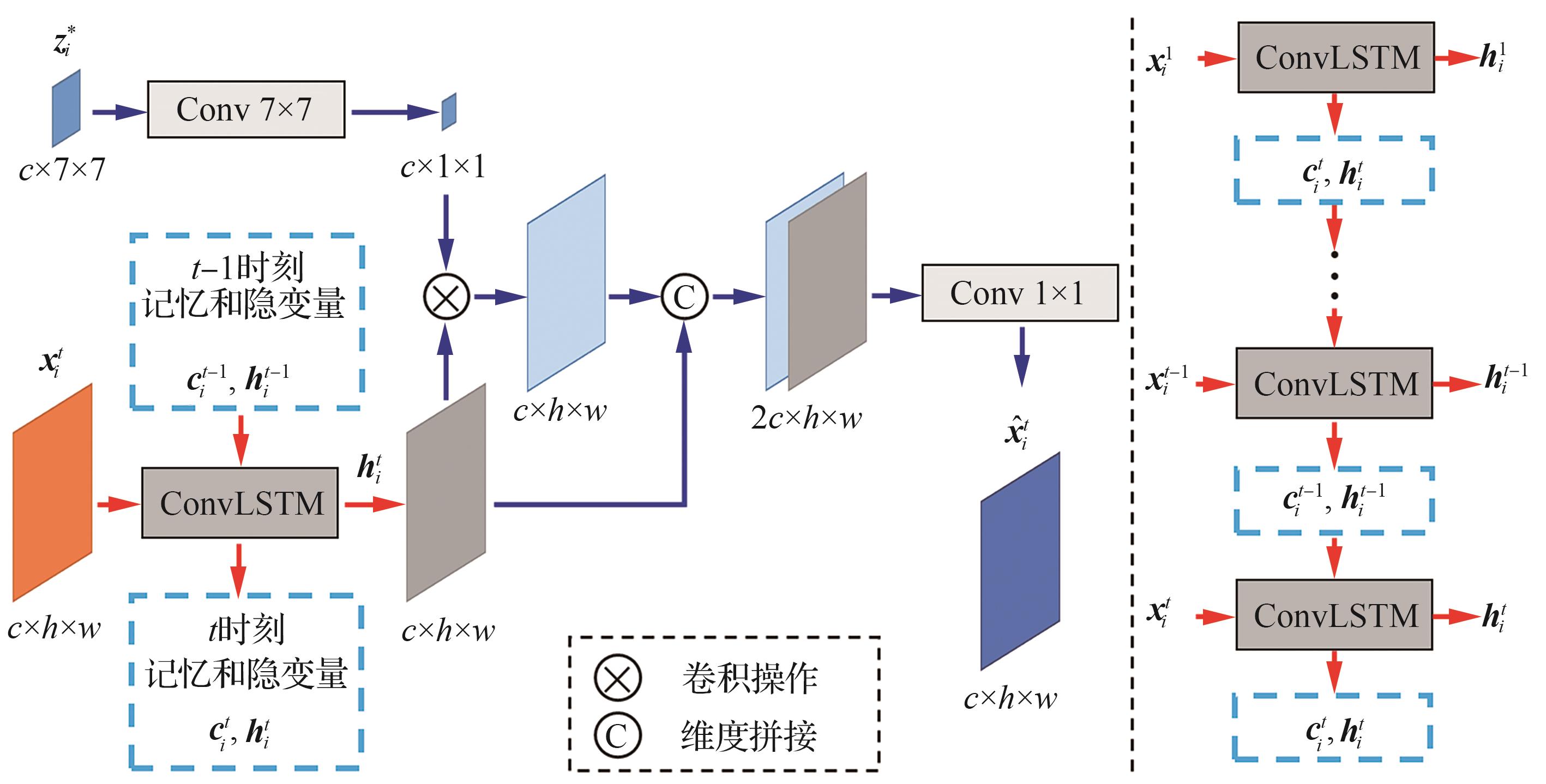
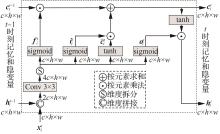
Fig.3
Convolutional long short-term memory network
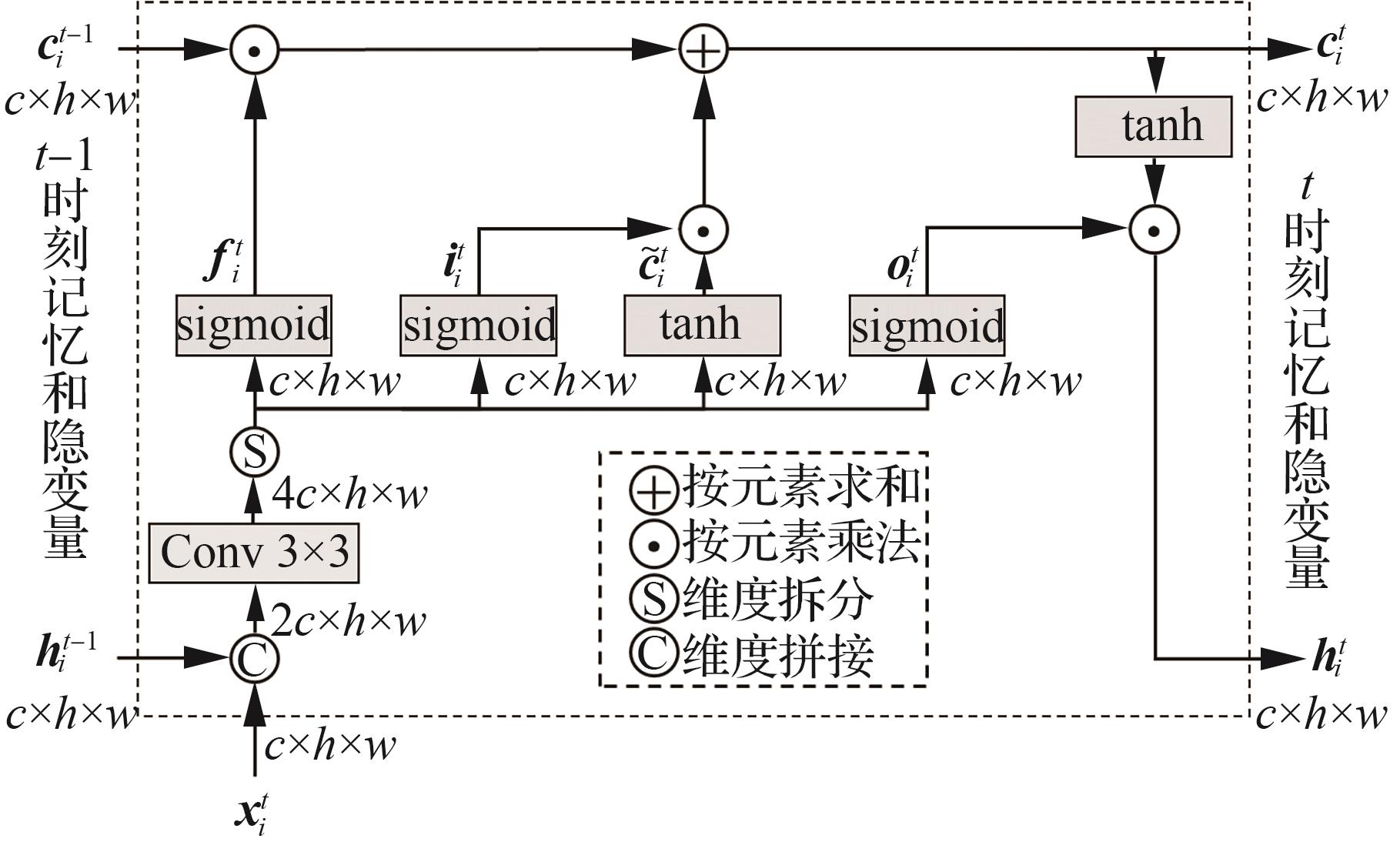
Fig.4
Structure of the output module
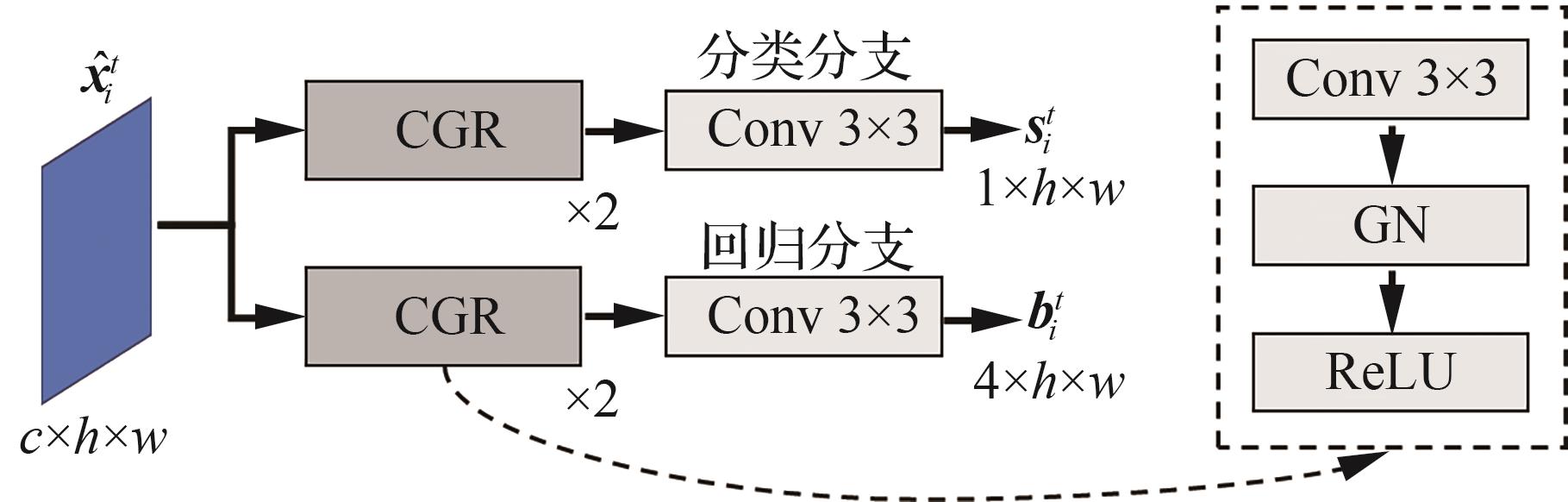

Fig.5
Example results of target enhancement and interference suppression module

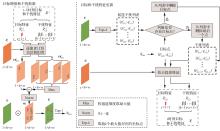
Fig.6
Target enhancement and interference suppression module
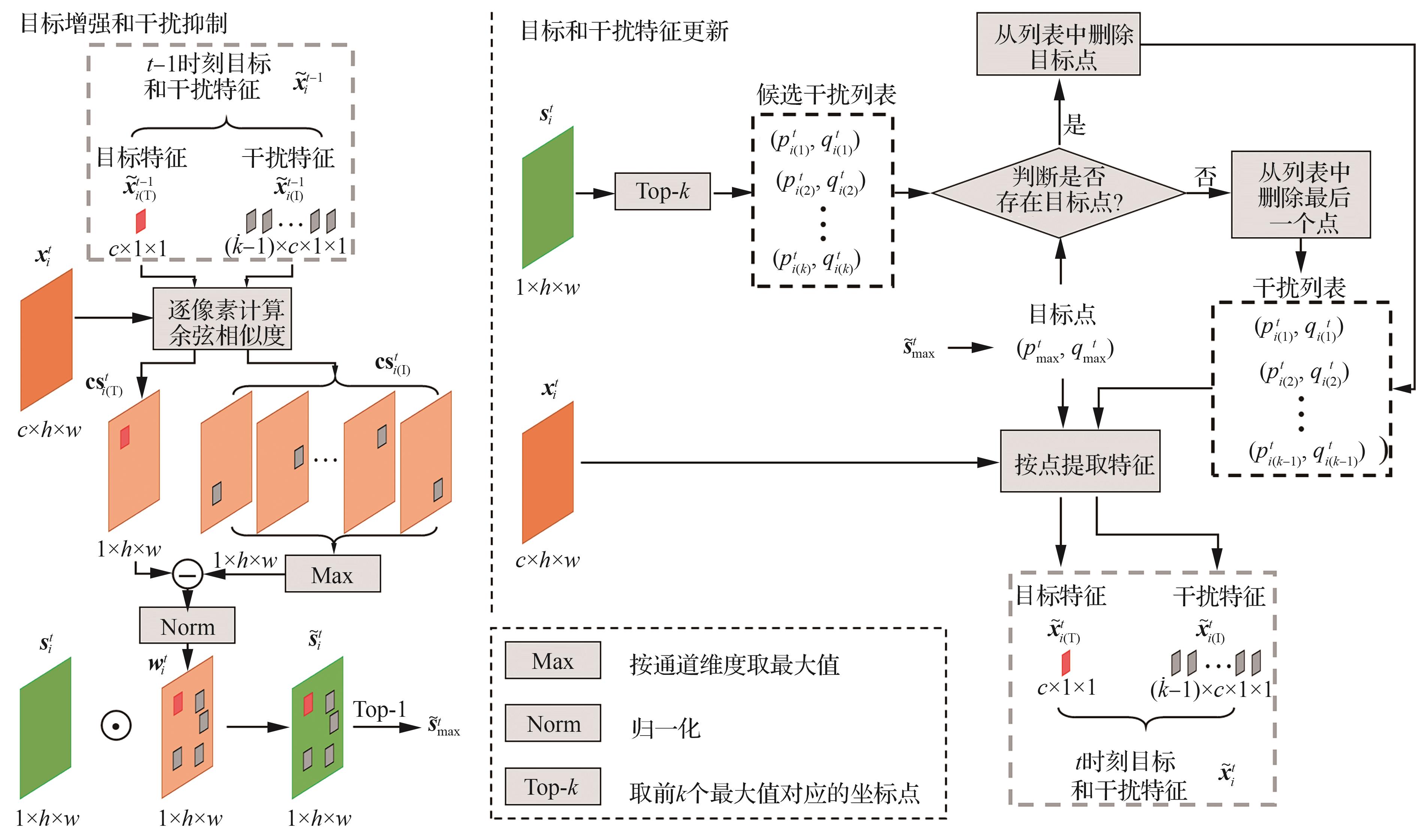
Fig.7
Target similarity map and interference similarity map
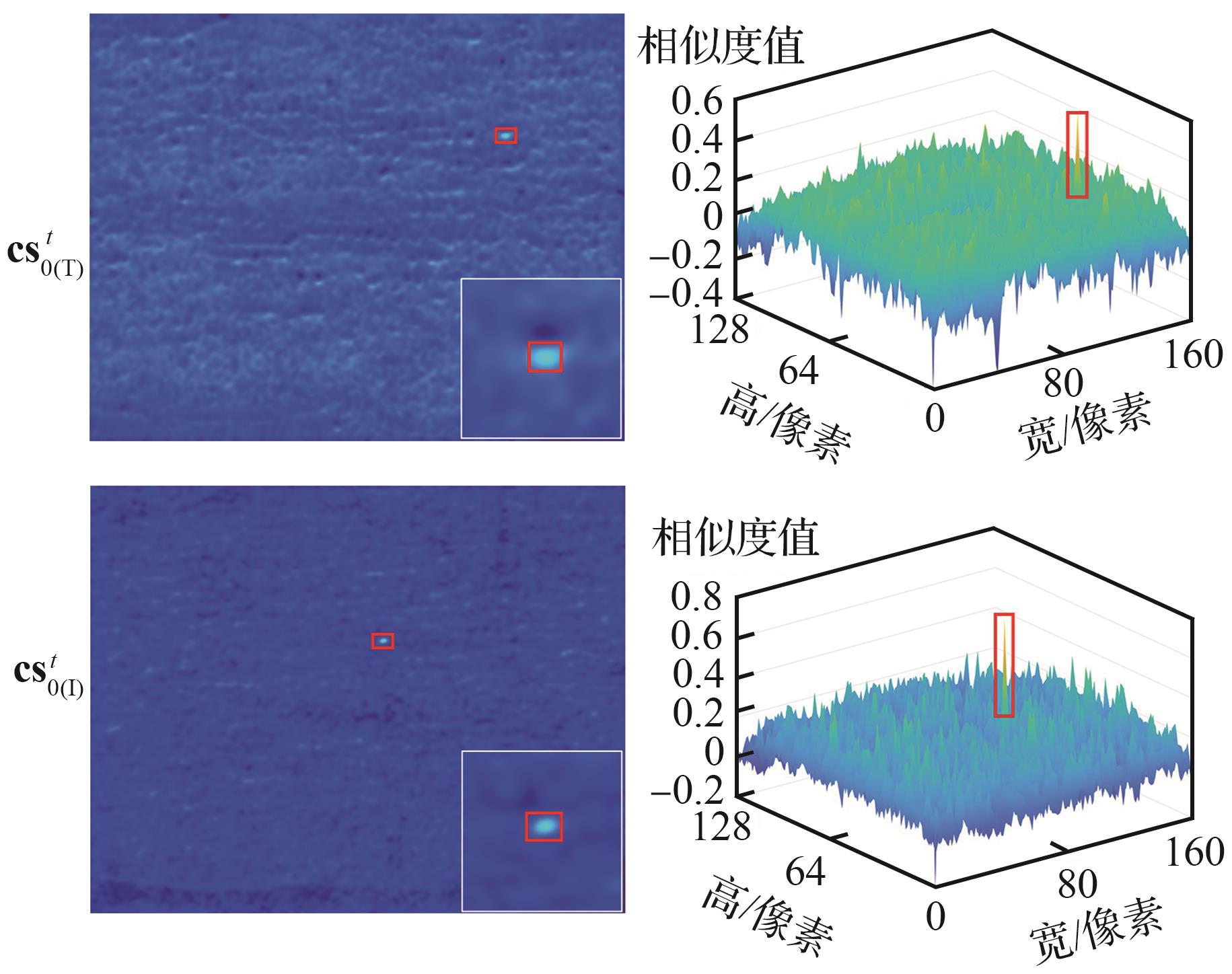
Table 1
Dynamic hierarchical acceleration method
| 前一帧最大得分 | 前一帧输出层级 | 动态层级加速策略 | FPN | FLOPs/G | Time/ms | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | ||||||||
| [0,0.3) | 0,1,2,3 | √ | √ | √ | √ | 0,1,2,3 | 352.84 | 41.28 | |||
| [0.3,0.7] | 0 | √ | √ | × | × | 0,1,2,3 | 335.54 | 36.35 | |||
| 1 | √ | √ | √ | × | 0,1,2,3 | 349.37 | 39.16 | ||||
| 2 | × | √ | √ | √ | 1,2,3 | 128.92 | 24.26 | ||||
| 3 | × | × | √ | √ | 2,3 | 72.27 | 18.91 | ||||
| (0.7,1] | 0 | √ | × | × | × | 0,1,2,3 | 280.23 | 31.54 | |||
| 1 | × | √ | × | × | 1,2,3 | 111.63 | 19.77 | ||||
| 2 | × | × | √ | × | 2,3 | 68.80 | 16.83 | ||||
| 3 | × | × | × | √ | 3 | 57.76 | 15.87 | ||||

Fig.8
Diagram of dynamic hierarchical acceleration method
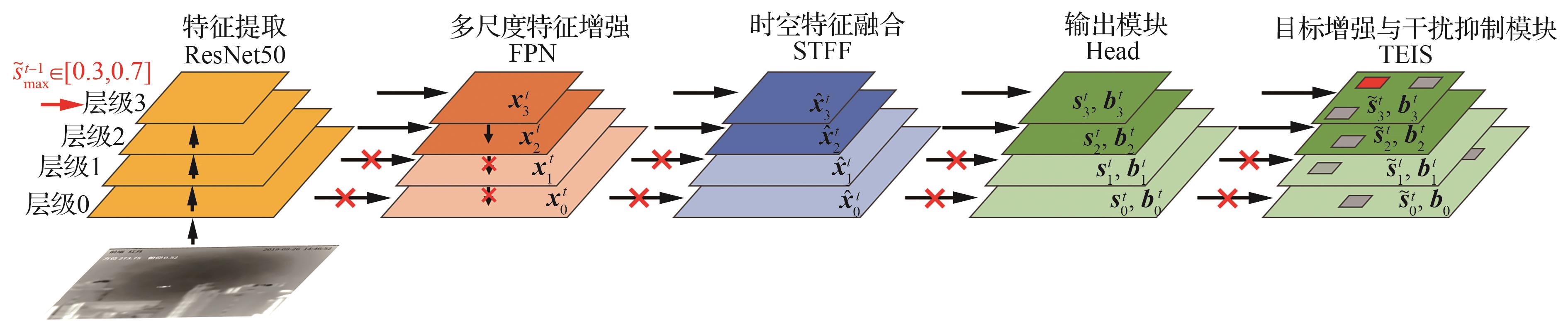
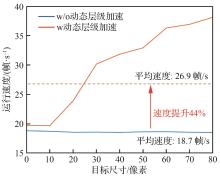
Fig.9
Relationship between target size and running speed

Table 2
Quantitative comparison of the proposed algorithm and 14 algorithms on three Anti-UAV Challenge test datasets
| 算法 | 来源 | 1st Anti-UAV test-dev | 2nd Anti-UAV test-dev | 3rd Anti-UAV val | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| P/% | AUC/% | P/% | AUC/% | P/% | AUC/% | |||||
| ATOM[ | CVPR 2019 | 79.3 | 61.6 | 72.5 | 54.1 | 58.5 | 43.1 | |||
| DiMP[ | ICCV 2019 | 85.2 | 66.8 | 77.7 | 59.1 | 64.4 | 47.4 | |||
| PrDiMP[ | CVPR 2020 | 89.1 | 69.2 | 82.2 | 61.3 | 66.4 | 49.0 | |||
| KYS[ | ECCV 2020 | 85.8 | 67.3 | 78.4 | 59.6 | 67.1 | 49.0 | |||
| STARK[ | ICCV 2021 | 89.4 | 69.5 | 82.2 | 62.0 | 69.0 | 48.8 | |||
| TOMP[ | CVPR 2022 | 83.0 | 65.8 | 74.3 | 57.8 | 60.8 | 43.8 | |||
| OSTrack[ | ECCV 2022 | 93.6 | 72.4 | 83.4 | 62.7 | 68.7 | 51.9 | |||
| SeqTrack[ | CVPR 2023 | 73.2 | 55.3 | 66.9 | 50.1 | 62.0 | 43.5 | |||
| AQATrack[ | CVPR 2024 | 90.9 | 70.3 | 80.7 | 60.9 | 66.2 | 47.5 | |||
| DaSiamRPN[ | ECCV 2018 | 90.7 | 68.7 | 77.2 | 57.7 | 59.6 | 42.0 | |||
| GlobalTrack[ | AAAI 2020 | 97.5 | 75.6 | 89.3 | 65.5 | 74.7 | 53.0 | |||
| LTMU[ | CVPR 2020 | 96.7 | 75.8 | 88.3 | 73.3 | |||||
| SiamSTA[ | ICCVW 2021 | 96.9 | 72.6 | 88.8 | 65.5 | |||||
| SiamDT[ | PAMI 2024 | 68.5 | 53.3 | |||||||
| STGT++(本文) | 98.0 | 76.5 | 92.4 | 69.4 | 78.7 | 56.5 | ||||

Fig.10
Precision plots and success plots of the proposed algorithm and 13 algorithms on three Anti-UAV Challenge test datasets
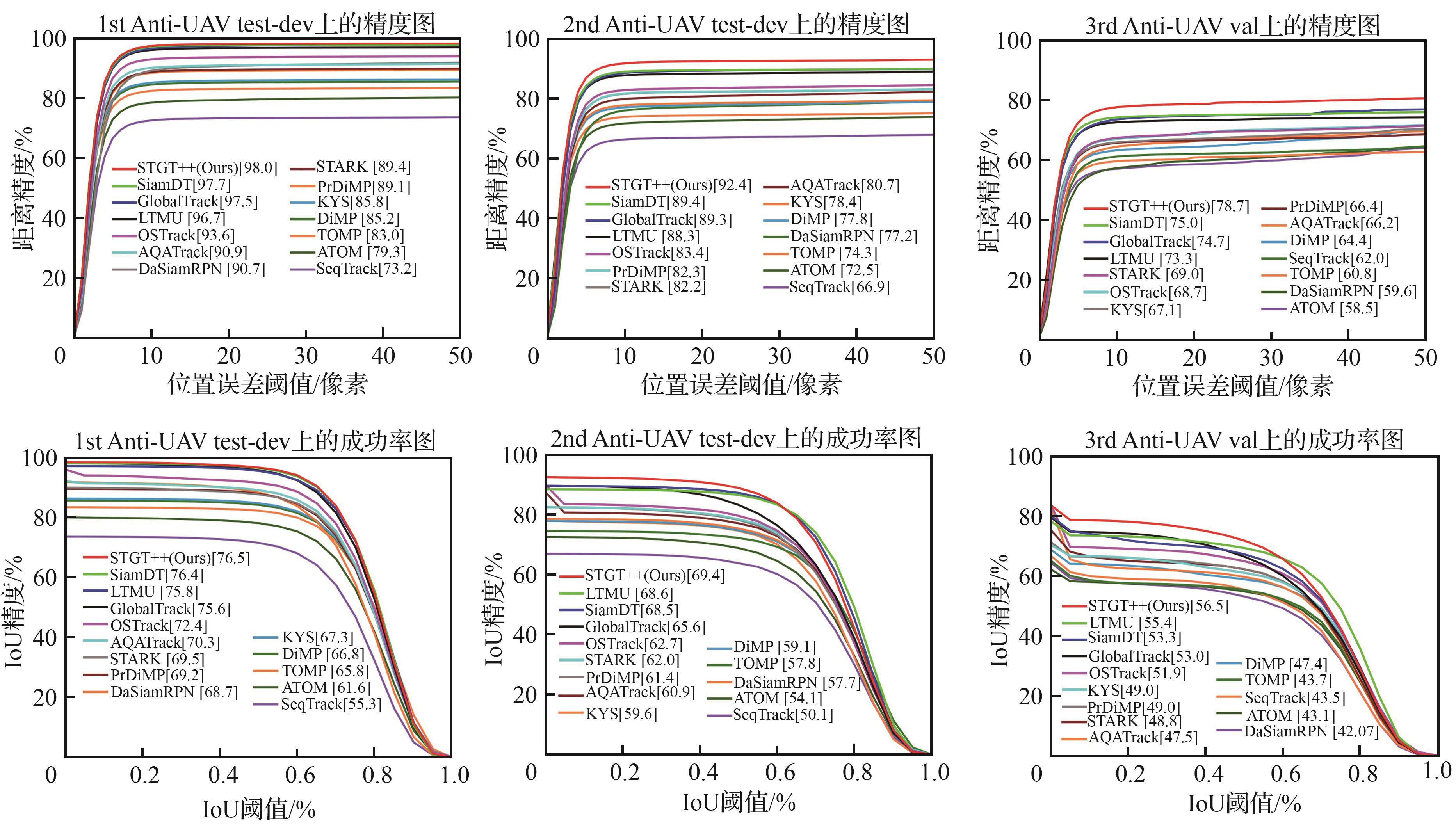
Table 3
Comparison results of the proposed algorithms and 3 algorithms for tracking targets with different sizes
| 算法 | 尺寸范围 | |||
|---|---|---|---|---|
| GlobalTrack | 58.1/36.3 | 49.1/31.4 | 94.4/71.3 | 94.3/77.0 |
| LTMU | 50.4/37.2 | 55.1/39.6 | 95.8/74.8 | 95.0/78.1 |
| SiamDT | 55.8/33.1 | 52.8/37.7 | 95.2/72.7 | 95.6/78.3 |
| STGT | 62.4/40.0 | 55.7/39.7 | 96.3/73.7 | 94.8/77.5 |
| STGT++ | 65.1/41.7 | 57.2/40.4 | 96.8/74.1 | 95.3/77.7 |
Table 4
Comparison results of parameters, FLOPs and inference performance among the proposed algorithm and 4 algorithms
| 性能指标 | DaSiamRPN | GlobalTrack | LTMU | SiamDT | STGT++ w/o DHA | STGT++ |
|---|---|---|---|---|---|---|
| 参数量/M | 60.1 | 59.0 | 112.1 | 62.4 | 59.3 | 59.3 |
| 计算量/G | 103.7 (541.1) | 287.7 | 148.5 (346.9) | 372.6 | 352.8 | 57.8~352.8 |
| 速度/(帧·s-1) | 22.7 | 22.3 | 1.5 | 9.1 | 18.7 | 26.9 |
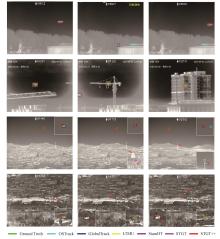
Fig.11
Tracking result visualization
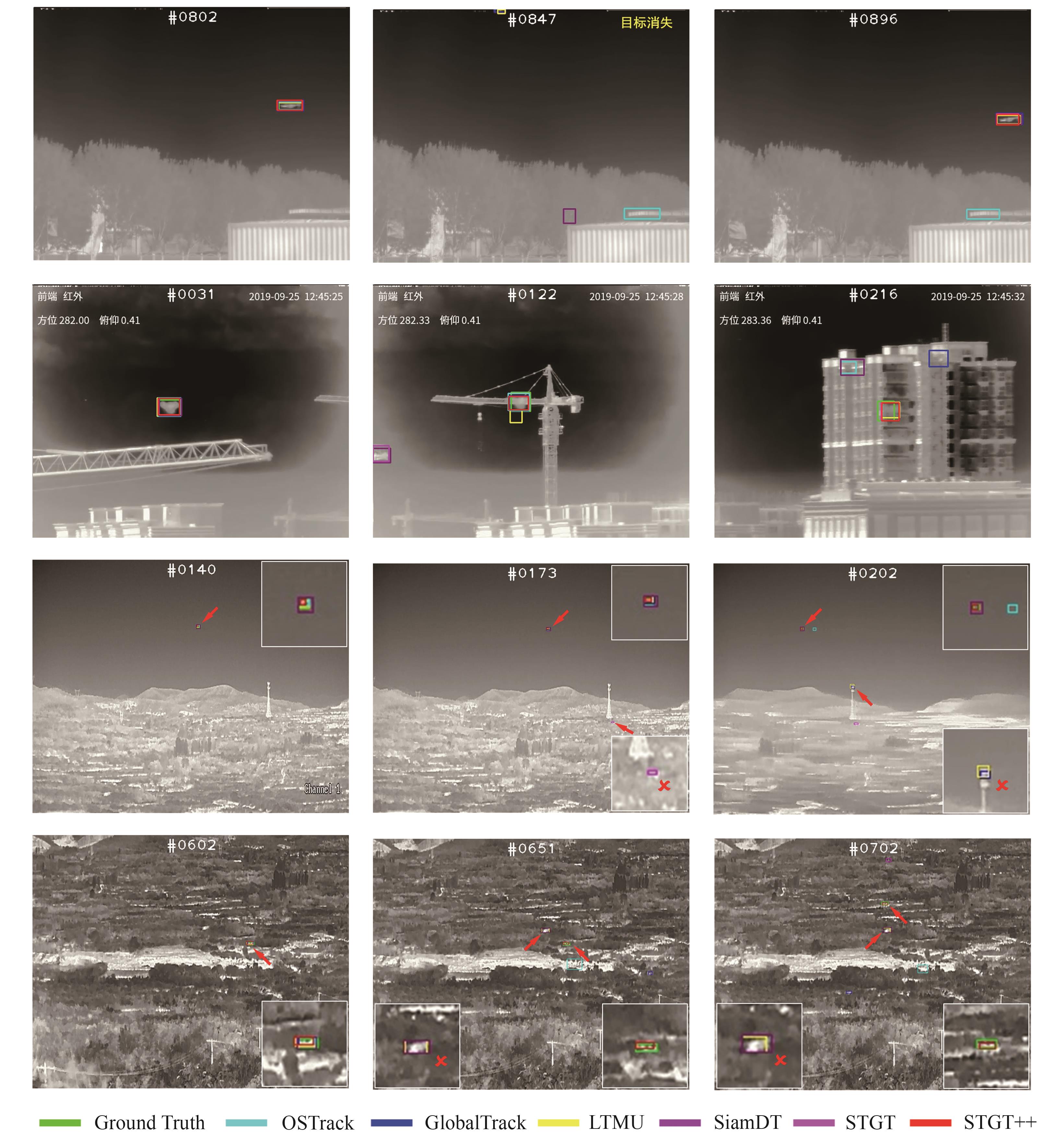

Fig.12
Tracking trajectory visualization
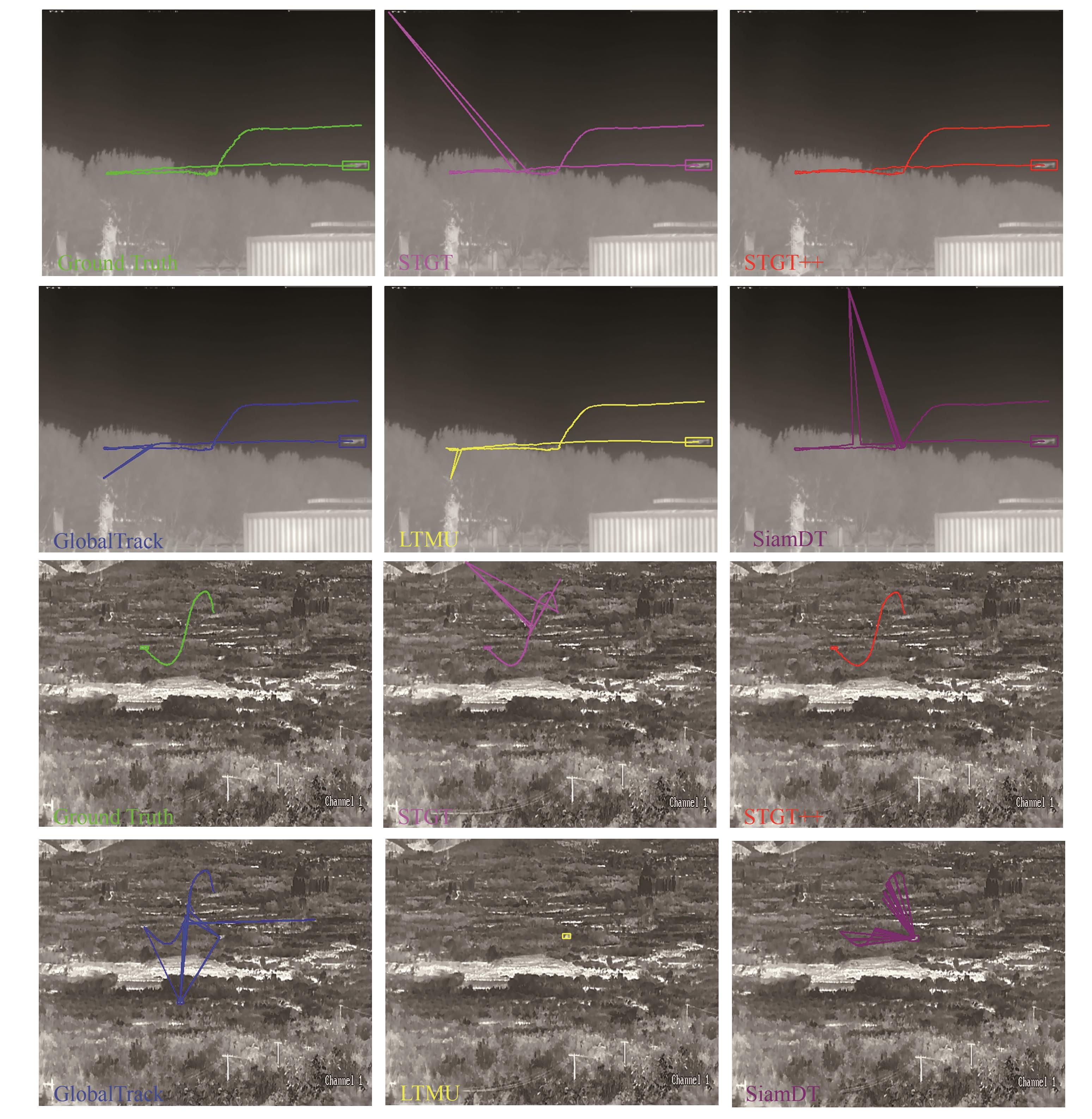
Table 5
Ablation study
| STFF | TEIS | DHA | P/% | AUC/% | 速度/ (帧·s-1) | |||
|---|---|---|---|---|---|---|---|---|
| FF | Conv LTSM | B | ||||||
| √ | 76.6 | 55.2 | 30.9 | |||||
| √ | √ | 77.2 | 55.6 | 21.1 | ||||
| √ | √ | √ | 77.4 | 55.8 | 20.8 | |||
| √ | √ | √ | √ | 78.8 | 56.6 | 18.7 | ||
| √ | √ | √ | √ | √ | ||||
Table 6
Impact of ResNet with different depths
| 性能指标 | 特征提取网络 | |||
|---|---|---|---|---|
| ResNet18 | ResNet34 | ResNet50 | ResNet101 | |
| P/% | 75.9 | 76.5 | 77.4 | 77.0 |
| AUC/% | 55.0 | 55.1 | 55.8 | 55.7 |
速度/ (帧·s-1) | 23.6 | 22.2 | 20.8 | 17.8 |
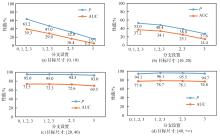
Fig.13
Impact of multi-level setting
Table 7
Comparison of different spatio-temporalfeature fusion methods
| 性能指标 | 时空特征融合方法 | ||
|---|---|---|---|
| 无 | ConvLSTM | Video SwinTransformer | |
| P/% | 76.8 | 77.4 | 75.0 |
| AUC/% | 55.3 | 55.8 | 54.2 |
| 速度/(帧·s-1) | 30.5 | 20.8 | 16.2 |
Fig.14
Effect of using spatio-temporal feature fusion on score maps
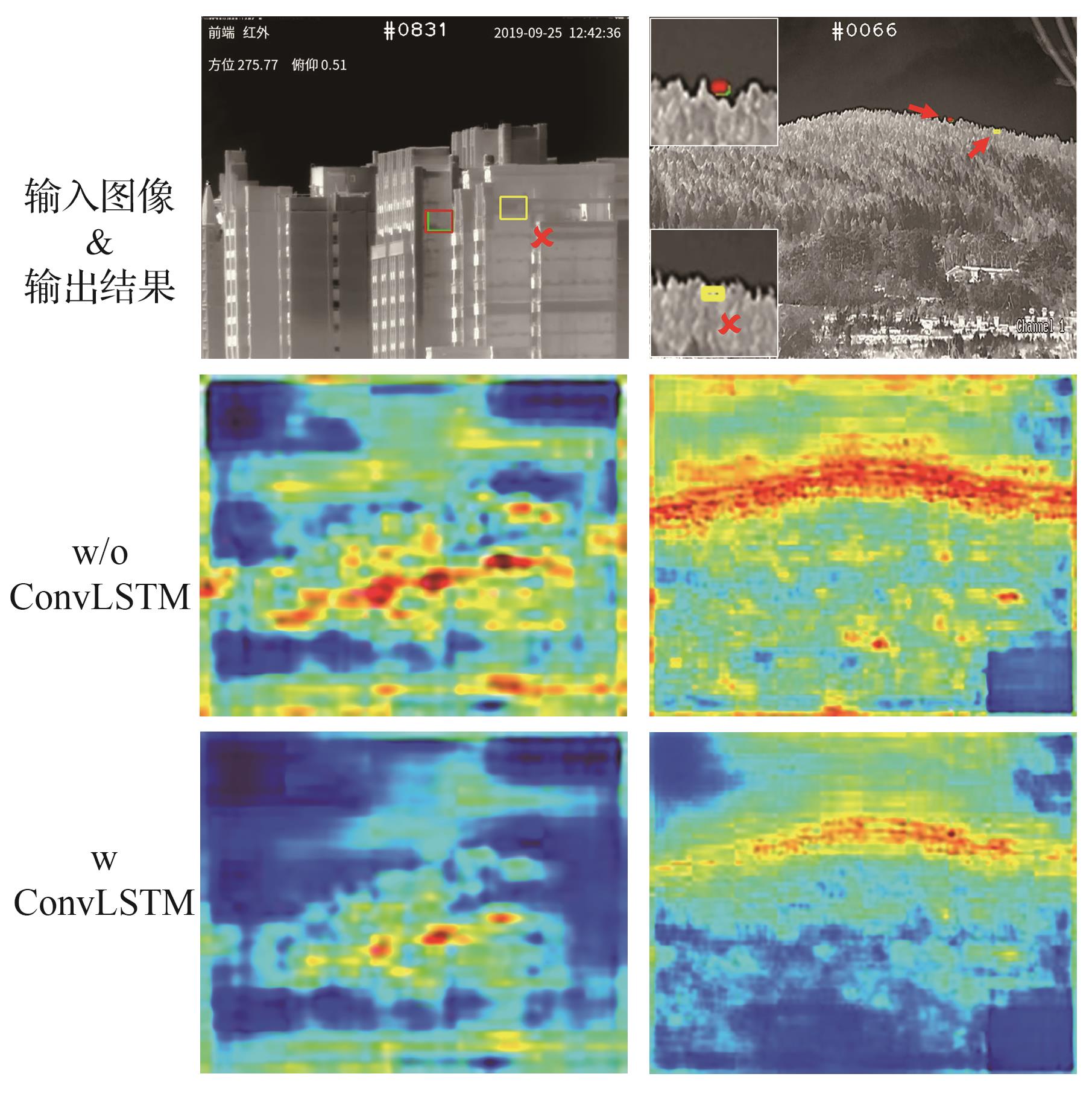
Table 8
Ablation study in TEIS
| 参数设置 | Mean w/o TE | Mean w TE | Max w/o TE | Max w TE |
|---|---|---|---|---|
| P/% | 77.6 | 78.2 | 78.6 | 78.8 |
| AUC/% | 56.1 | 56.3 | 56.5 | 56.6 |

Fig.15
Effect of different interference similarity map fusion methods on weights
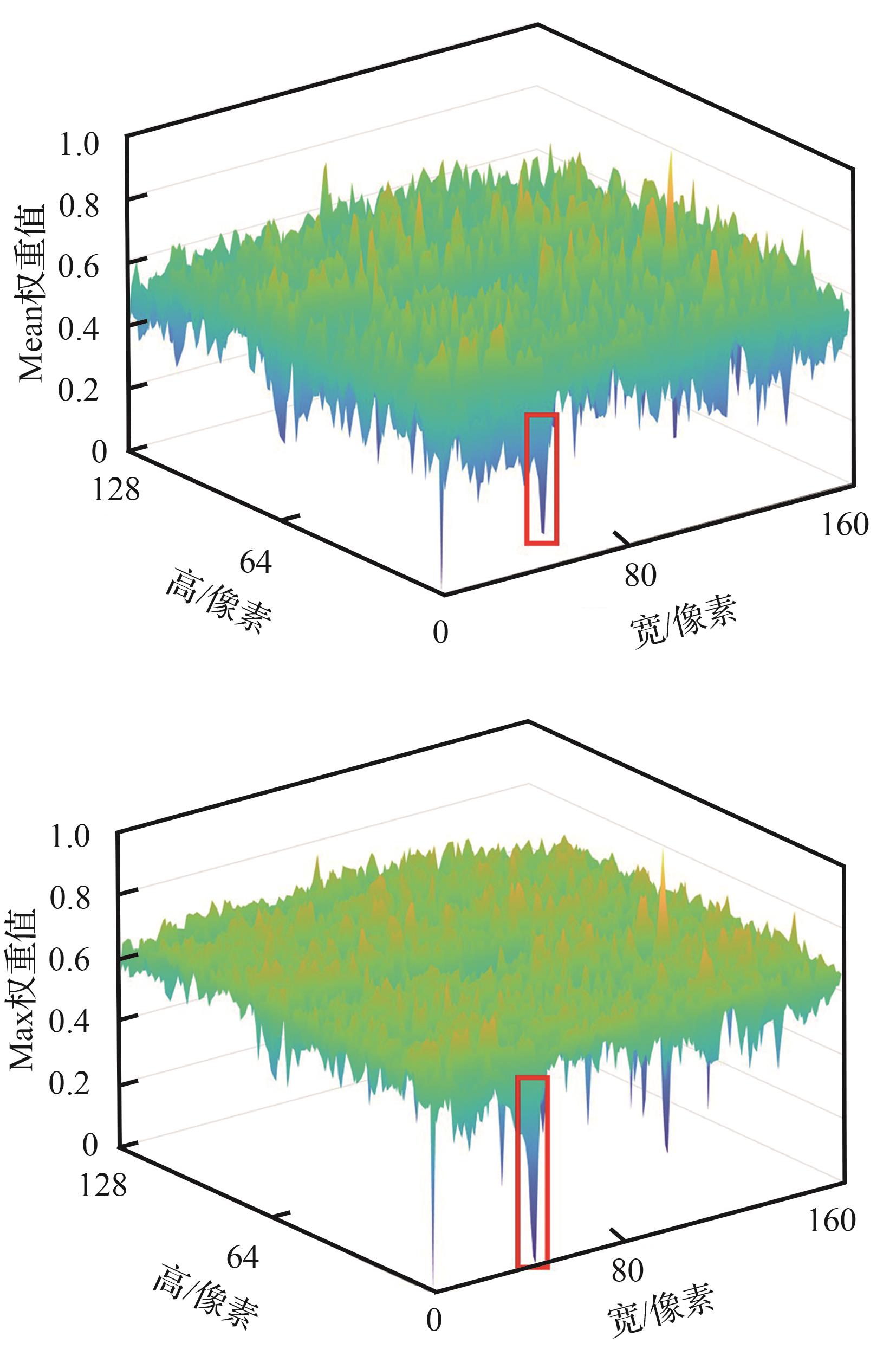
Table 9
Parameter analysis of the output module
| 性能指标 | CGR数量 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| P/% | 76.8 | 77.4 | 77.2 | 77.4 |
| AUC/% | 55.1 | 55.8 | 55.9 | 55.7 |
| 速度/(帧·s-1) | 23.3 | 20.8 | 18.6 | 16.3 |
Fig.16
Parameter analysis of TEIS
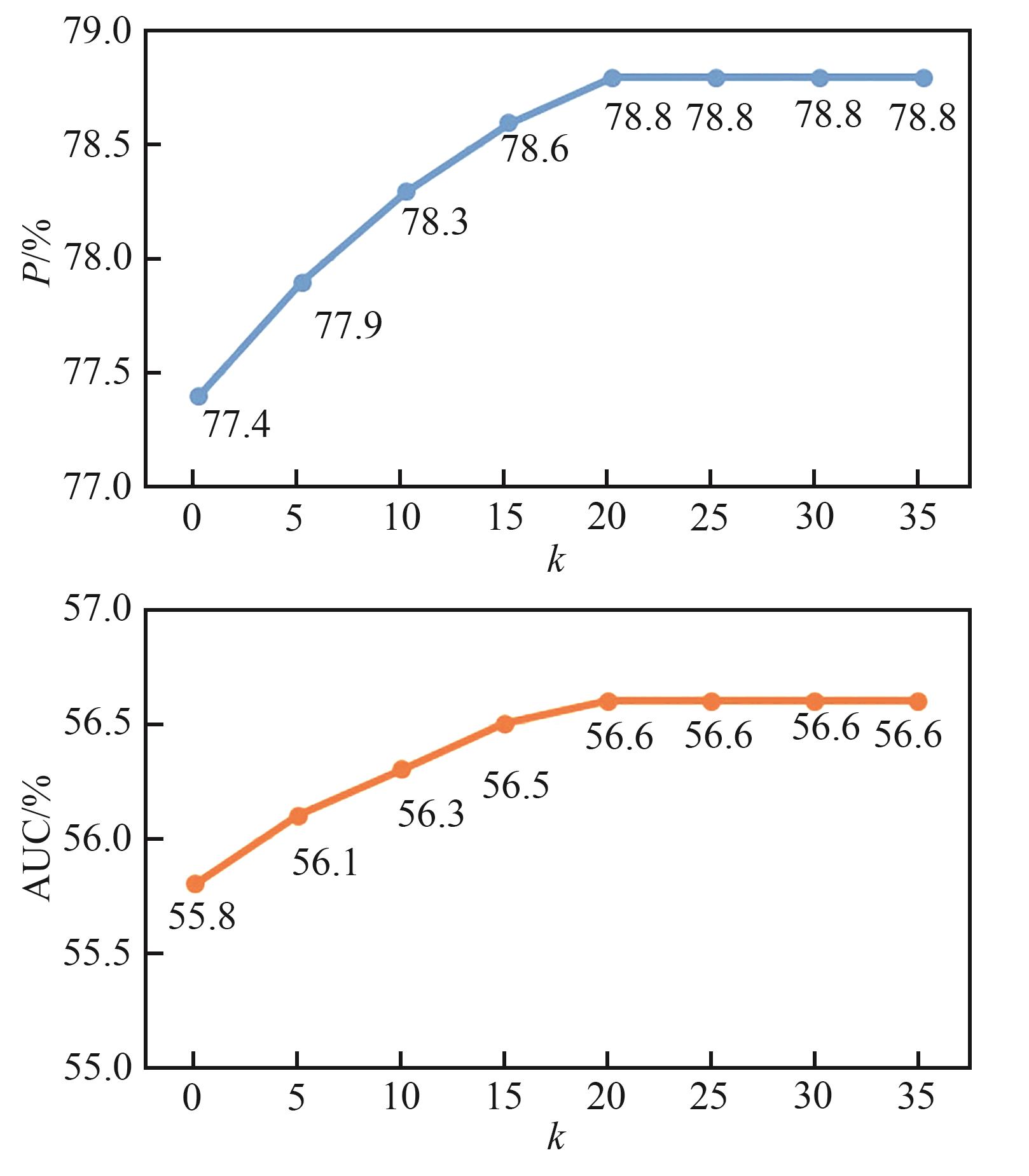
Table 10
Parameter analysis of DHA
| 0.6 | 0.7 | 0.8 | |
|---|---|---|---|
| 0.2 | 78.4/56.3/28.9 | 78.6/56.4/27.4 | 78.6/56.4/25.7 |
| 0.3 | 78.5/56.3/28.6 | 78.7/56.5/26.9 | 78.7/56.5/25.5 |
| 0.4 | 78.5/56.4/27.9 | 78.7/56.5/26.3 | 78.7/56.5/25.0 |
| 0.5 | 78.6/56.4/26.9 | 78.7/56.5/25.5 | 78.8/56.5/23.8 |
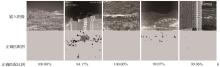
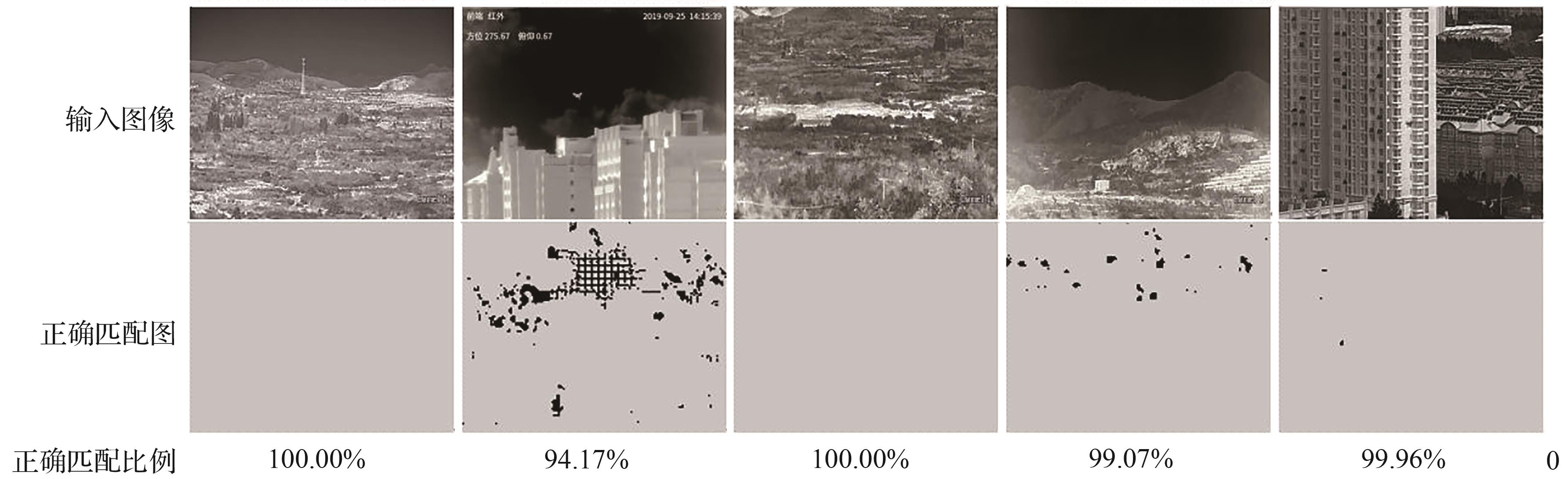
Fig.A1
Correct match maps and correct match ratios of different scenarios
| [1] | 王传云, 苏阳, 王琳霖, 等. 面向反制无人机集群的多目标连续鲁棒跟踪算法[J]. 航空学报, 2024, 45(7): 329017. |
| WANG C Y, SU Y, WANG L L, et al. Multi-object continuous robust tracking algorithm for anti-UAV swarm[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 329017 (in Chinese). | |
| [2] | 王红涛, 邓淼磊, 赵文君, 等. 基于深度学习的单目标跟踪算法综述[J]. 计算机系统应用, 2022, 31(5): 40-51. |
| WANG H T, DENG M L, ZHAO W J, et al. Survey on single object tracking algorithms based on deep learning[J]. Computer Systems and Applications, 2022, 31(5): 40-51 (in Chinese). | |
| [3] | YAN B, PENG H W, FU J L, et al. Learning spatio-temporal transformer for visual tracking[C]∥2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2021: 10428-10437. |
| [4] | YE B T, CHANG H, MA B P, et al. Joint feature learning and relation modeling for tracking: A one-stream framework[C]∥Computer Vision-ECCV 2022. Cham: Springer, 2022: 341-357. |
| [5] | CHEN X, PENG H W, WANG D, et al. SeqTrack: Sequence to sequence learning for visual object tracking[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2023: 14572-14581. |
| [6] | DAI K N, ZHANG Y H, WANG D, et al. High-performance long-term tracking with meta-updater[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 6297-6306. |
| [7] | YU Q J, MA Y C, HE J F, et al. A unified transformer-based tracker for anti-UAV tracking[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway: IEEE Press, 2023: 3036-3046. |
| [8] | HUANG L H, ZHAO X, HUANG K Q. GlobalTrack: A simple and strong baseline for long-term tracking[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(7): 11037-11044. |
| [9] | HUANG B, LI J N, CHEN J J, et al. Anti-UAV410: A thermal infrared benchmark and customized scheme for tracking drones in the wild[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(5): 2852-2865. |
| [10] | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN:Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| [11] | FANG H Z, WANG X L, LIAO Z K, et al. A real-time anti-distractor infrared UAV tracker with channel feature refinement module[C]∥2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). Piscataway: IEEE Press, 2021: 1240. |
| [12] | JIANG N, WANG K R, PENG X K, et al. Anti-UAV: A large-scale benchmark for vision-based UAV tracking[J]. IEEE Transactions on Multimedia, 2021, 25: 486-500. |
| [13] | LI S J, ZHAO S, CHENG B, et al. Robust visual tracking via hierarchical particle filter and ensemble deep features[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2020, 30(1): 179-191. |
| [14] | HARE S, GOLODETZ S, SAFFARI A, et al. Struck: Structured output tracking with kernels[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(10): 2096-2109. |
| [15] | HENRIQUES J F, CASEIRO R, MARTINS P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[C]∥Computer Vision-ECCV 2012. Cham: Springer, 2012: 702-715. |
| [16] | LI B, WU W, WANG Q, et al. SiamRPN++: Evolution of Siamese visual tracking with very deep networks[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2019: 4277-4286. |
| [17] | 丁奇帅, 雷帮军, 吴正平. 基于孪生网络的轻量型无人机单目标跟踪算法 [J]. 航空学报, 2025, 46(4): 330925. |
| DING Q S, LEI B J, WU Z P. A lightweight single object tracking algorithm for UAVs based on Siamese network [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330925 (in Chinese). | |
| [18] | MAYER C, DANELLJAN M, BHAT G, et al. Transforming model prediction for tracking[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 8721-8730. |
| [19] | ZHU Z, WANG Q, LI B, et al. Distractor-aware Siamese networks for visual object tracking[C]∥Computer Vision-ECCV 2018. Cham: Springer, 2018: 103-119. |
| [20] | HUANG B, CHEN J J, XU T F, et al. SiamSTA: Spatio-temporal attention based Siamese tracker for tracking UAVs[C]∥2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). Piscataway: IEEE Press, 2021: 1204-1212. |
| [21] | CHEN X, YAN B, ZHU J W, et al. Transformer tracking [C]∥2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2021: 8122-8131. |
| [22] | WEI X, BAI Y F, ZHENG Y C, et al. Autoregressive visual tracking[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2023: 9697-9706. |
| [23] | XIE J X, ZHONG B N, MO Z Y, et al. Autoregressive queries for adaptive tracking with spatio-temporal transformers[C]∥2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2024: 19300-19309. |
| [24] | WU H, LI W Q, LI W Q, et al. A real-time robust approach for tracking UAVs in infrared videos[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway: IEEE Press, 2020: 4448-4455. |
| [25] | DANELLJAN M, BHAT G, KHAN F S, et al. ATOM: Accurate tracking by overlap maximization[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2019: 4655-4664. |
| [26] | ZHAO J J, ZHANG X H, ZHANG P Y. A unified approach for tracking UAVs in infrared[C]∥2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). Piscataway: IEEE Press, 2021: 1213-1222. |
| [27] | DANELLJAN M, VAN GOOL L, TIMOFTE R. Probabilistic regression for visual tracking[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 7181-7190. |
| [28] | SHI X J, CHEN Z R, WANG H, et al. Convolutional LSTM network: A machine learning approach for precipitation nowcasting[C]∥Proceedings of the 29th International Conference on Neural Information Processing Systems. New York: ACM, 2015: 802-810.. |
| [29] | TIAN Z, SHEN C H, CHEN H, et al. FCOS: Fully convolutional one-stage object detection[C]∥2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2019: 9626-9635. |
| [30] | BHAT G, DANELLJAN M, VAN GOOL L, et al. Learning discriminative model prediction for tracking[C]∥2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2019: 6181-6190. |
| [31] | BHAT G, DANELLJAN M, VAN GOOL L, et al. Know your surroundings: Exploiting scene information for object tracking[C]∥Computer Vision-ECCV 2020. Cham: Springer, 2020: 205-221. |
| [32] | LIU Z, NING J, CAO Y, et al. Video swin transformer [C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 3192-3201. |
| [1] | Leyan LI, Rennong YANG, Anxin GUO, Qi SONG, Jialiang ZUO. Beyond-visual-range air combat threat prediction and dynamic evasion method based on all-domain fire field theory [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332205-332205. |
| [2] | Ye TAO, Jinhui TANG, Zhen YAN, Chen ZHOU, Chong WANG. A trajectory imputation method integrating representation transformation and pattern regression [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(1): 332106-332106. |
| [3] | Jianyu XU, Li ZHOU, Zhanxue WANG, Jie SHI, Hao SHI. Calculation method for hypersonic plume infrared radiation based on a fast line-by-line calculation model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 630778-630778. |
| [4] | Lingjie MENG, Hongguang LI, Xinjun LI. SAR image simulation method guided by geomorphic category information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(7): 331003-331003. |
| [5] | Zhihao ZHAO, Zhaohua YANG, Yun WU, Yuanjin YU. Single-photon counting imaging denoising method based on deep learning in low-light environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630531-630531. |
| [6] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [7] | Zijian XIANG, Zhenyu MA, Xixiang YANG. Inversion of structural performance parameters of composite materials based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 231877-231877. |
| [8] | Tianqi FAN, Zhengxia ZOU, Zhenwei SHI. Typical remote sensing target detection with data synthesis based on reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631955-631955. |
| [9] | Kui LIU, Hao SUN, Han WU, Kefeng JI, Gangyao KUANG. Dynamic brightness reconstruction for UAV visible-infrared fusion object detection [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631968-631968. |
| [10] | Bo PENG, Jikang BAI, Weiwen CHEN, Xiangtao ZHENG, Jianjun LEI, Xiaoqiang LU. Research progress for UAV search and rescue methods based on deep learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 632761-632761. |
| [11] | Qiushi CHEN, Jinglong GAO, Meng WANG, Wenkun BIAN, Haojun HAN. Overview of anti-interference technology of unmanned aerial vehicle satellite navigation system [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331797-331797. |
| [12] | Xiaowei JIANG, Yiquan WU. Research progress of UAV aerial image mosaic methods [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331799-331799. |
| [13] | Lin CHEN, Xiwen GU, Zhiying CHEN, Zhuo ZHANG, Xiaoliang SUN. High-precision monocular vision pose measurement for large distance span in carrier landing guidance [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331568-331568. |
| [14] | Bin SUN, Hang YOU, Wenbo LI, Xiangrui LIU, Jiayi MA. Dual-band payload image fusion and its applications in low-altitude remote sensing [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531343-531343. |
| [15] | Fanteng MENG, Yong QIN, Jing CUI, Yunpeng WU, Zicheng ZHANG, Shaowei WEI. Unknown risk detection in external environment of railroad using UAV images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531262-531262. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341