Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (23): 631968.doi: 10.7527/S1000-6893.2025.31968
• special column • Previous Articles
Kui LIU1,2, Hao SUN1,2, Han WU1,2, Kefeng JI1,2( ), Gangyao KUANG1,2
), Gangyao KUANG1,2
Received:2025-03-12
Revised:2025-03-29
Accepted:2025-05-28
Online:2025-06-10
Published:2025-06-06
Contact:
Kefeng JI
E-mail:jikefeng@nudt.edu.cn
Supported by:CLC Number:
Kui LIU, Hao SUN, Han WU, Kefeng JI, Gangyao KUANG. Dynamic brightness reconstruction for UAV visible-infrared fusion object detection[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631968.
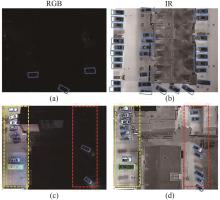
Fig.1
Examples of visible and infrared images under low illumination conditions
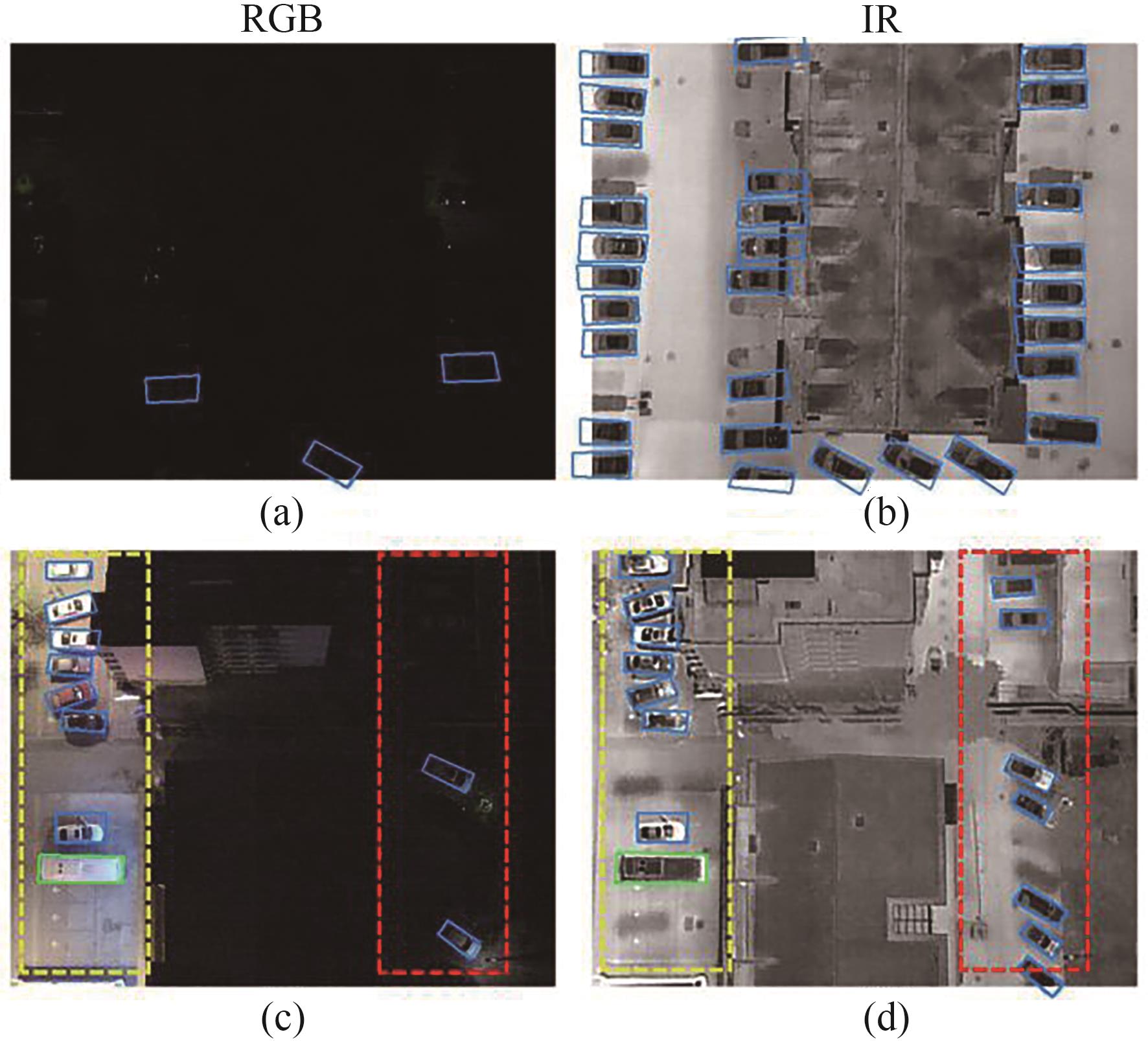

Fig.2
Framework of proposed algorithm
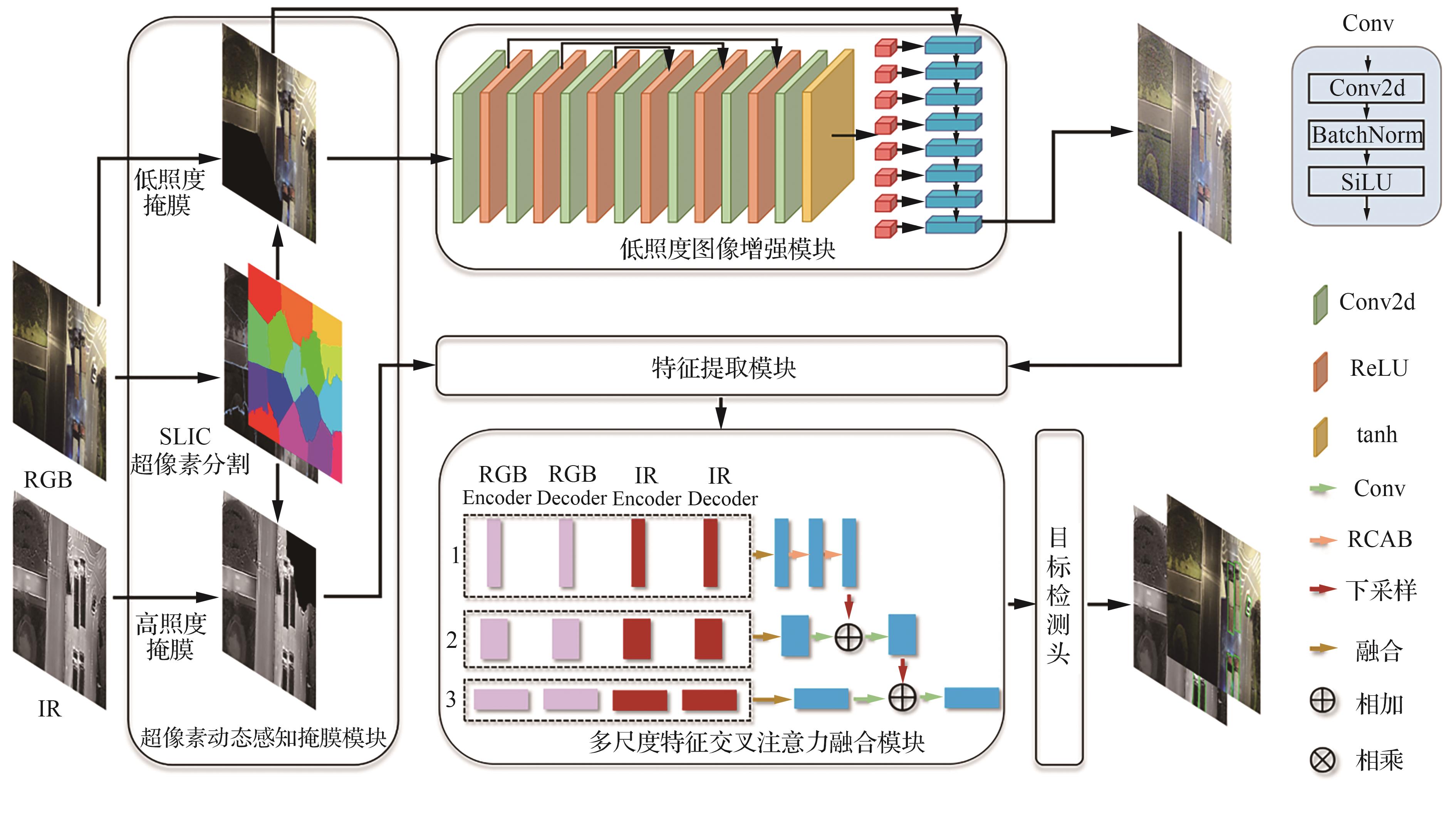
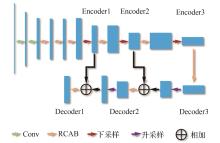
Fig.3
Feature extraction module
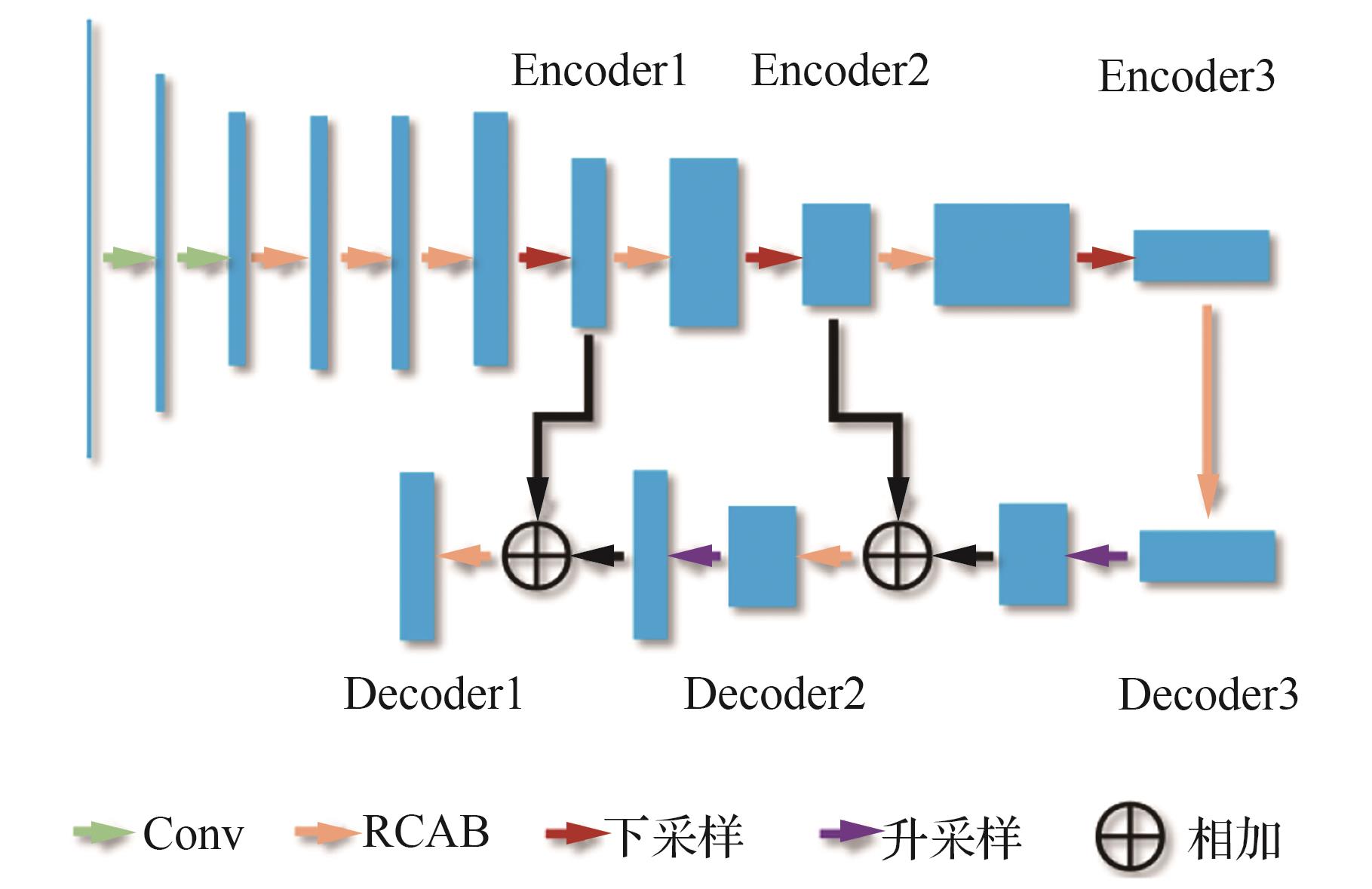
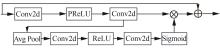
Fig.4
Residual channel attention block
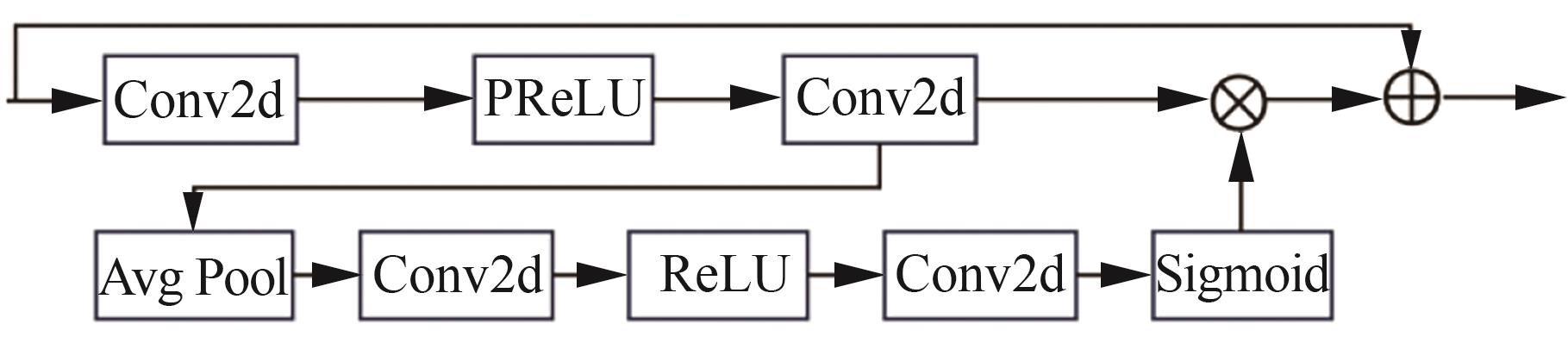

Fig.5
Cross-attention fusion module
Table 1
Comparison of results of DroneVehicle dataset on different methods
| 方法 | 汽车 | 面包车 | 公交车 | 货车 | 卡车 | mAP50 | Params.(M) | GFLOPs | 模态 |
|---|---|---|---|---|---|---|---|---|---|
| S2A-Net | 0.866 | 0.425 | 0.757 | 0.260 | 0.207 | 0.503 | 36.2 | 197.6 | RGB |
| RepPoints | 0.876 | 0.390 | 0.622 | 0.244 | 0.222 | 0.471 | 36.6 | 194.3 | |
| R3Det | 0.801 | 0.318 | 0.718 | 0.220 | 0.174 | 0.446 | 41.7 | 330.7 | |
| Faster R-CNN | 0.892 | 0.647 | 0.874 | 0.475 | 0.438 | 0.665 | 41.1 | 198.4 | |
| Oriented R-CNN | 0.893 | 0.673 | 0.890 | 0.493 | 0.437 | 0.677 | 41.1 | 198.5 | |
| YOLOv8 | 0.967 | 0.720 | 0.943 | 0.557 | 0.535 | 0.744 | 3.1 | 8.4 | |
| S2A-Net | 0.896 | 0.365 | 0.779 | 0.155 | 0.242 | 0.488 | 36.2 | 197.6 | IR |
| RepPoints | 0.894 | 0.406 | 0.609 | 0.270 | 0.285 | 0.493 | 36.6 | 194.3 | |
| R3Det | 0.892 | 0.346 | 0.776 | 0.231 | 0.297 | 0.508 | 41.7 | 330.7 | |
| Faster R-CNN | 0.902 | 0.638 | 0.884 | 0.446 | 0.488 | 0.672 | 41.1 | 198.4 | |
| Oriented R-CNN | 0.903 | 0.704 | 0.892 | 0.464 | 0.546 | 0.702 | 41.1 | 198.5 | |
| YOLOv8 | 0.769 | 0.565 | 0.644 | 3.1 | 8.4 | ||||
| UA-CMDet | 0.875 | 0.871 | 0.607 | 0.380 | 0.468 | 0.640 | 138.7 | RGB+IR | |
| ICAFusion | 0.816 | 0.560 | 0.318 | 0.333 | 0.577 | 120.2 | 180.0 | ||
| MBNet | 0.901 | 0.536 | 0.888 | 0.624 | 0.644 | 0.719 | |||
| LF-MDet | 0.822 | 0.866 | 0.736 | 0.570 | 0.596 | 0.718 | 38.7 | ||
| E2E-MFD | 0.903 | 0.898 | 0.646 | 0.774 | 31.3 | 105.5 | |||
| 本文算法 | 0.985 | 0.583 | 0.962 | 0.650 | 0.804 | 0.797 | 143.6 |
Table 2
Comparison of results of VEDAI dataset on different methods
| 方法 | 汽车 | 卡车 | 船 | 拖拉机 | 露营车 | 面包车 | 皮卡车 | 其他 | mAP50 | Params.(M) | GFLOPs | 模态 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R3Det | 0.658 | 0.233 | 0.251 | 0.150 | 0.454 | 0.343 | 0.524 | 0.202 | 0.352 | 41.7 | 330.7 | RGB |
| Faster R-CNN | 0.869 | 0.705 | 0.710 | 0.668 | 0.832 | 0.738 | 0.823 | 0.537 | 0.735 | 41.1 | 198.4 | |
| DINO | 0.556 | 0.437 | 0.409 | 0.483 | 0.577 | 0.594 | 0.530 | 0.281 | 0.738 | 47.6 | 284.0 | |
| YOLOv8 | 0.846 | 0.715 | 0.532 | 0.675 | 0.746 | 0.630 | 0.753 | 0.496 | 0.675 | 3.1 | 8.4 | |
| R3Det | 0.670 | 0.182 | 0.270 | 0.252 | 0.467 | 0.219 | 0.599 | 0.345 | 0.375 | 41.7 | 330.7 | IR |
| Faster R-CNN | 0.859 | 0.784 | 0.500 | 0.789 | 0.746 | 0.836 | 0.364 | 0.712 | 41.1 | 198.4 | ||
| DINO | 0.509 | 0.427 | 0.384 | 0.399 | 0.563 | 0.518 | 0.551 | 0.283 | 0.688 | 47.6 | 284.0 | |
| YOLOv8 | 0.857 | 0.769 | 0.419 | 0.519 | 0.770 | 0.740 | 0.762 | 0.367 | 0.650 | 3.1 | 8.4 | |
| SuperYOLO | 0.702 | 0.602 | 0.804 | 0.857 | 0.751 | RGB+IR | ||||||
| ICAFusion | 0.837 | 0.486 | 0.459 | 0.713 | 0.699 | 0.670 | 0.776 | 0.457 | 0.637 | 120.2 | 311.5 | |
| C2Former | 0.872 | 0.774 | 0.729 | 0.827 | 0.752 | 0.807 | 0.584 | 101.0 | 430.5 | |||
| 本文算法 | 0.919 | 0.821 | 0.713 | 0.764 | 0.849 | 0.523 | 0.779 | 30.2 | 143.6 |
Table 3
Comparison of results of LIS dataset on different methods
| 方法 | 自行车 | 汽车 | 电动车 | 公交车 | 水瓶 | 椅子 | 显示器 | 餐桌 | mAP50 | Params.(M) | GFLOPs | 模态 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FCOS | 0.431 | 0.822 | 0.421 | 0.567 | 0.477 | 0.389 | 0.179 | 0.330 | 0.450 | 32.1 | 191.5 | RGB |
| FreqFusion | 0.586 | 0.528 | 0.527 | 0.571 | 0.757 | 0.394 | 0.581 | 0.601 | 46.9 | 103.3 | ||
| FADC | 0.588 | 0.520 | 0.495 | 0.536 | 0.866 | 0.357 | 0.563 | 0.581 | 41.4 | 201.7 | ||
| Faster R-CNN | 0.547 | 0.552 | 0.703 | 0.498 | 0.507 | 0.325 | 0.500 | 0.561 | 41.2 | 201.7 | ||
| YOLOv8 | 0.849 | 0.612 | 0.550 | 0.505 | 0.413 | 0.650 | 3.1 | 8.4 | ||||
| w/ LIIE | 0.637 | 0.864 | 0.814 | 0.575 | 0.515 | 0 | 0.631 |

Fig.6
Accuracy comparison between proposed method and fusion object detection algorithm on DroneVehicle and VEDAI datasets
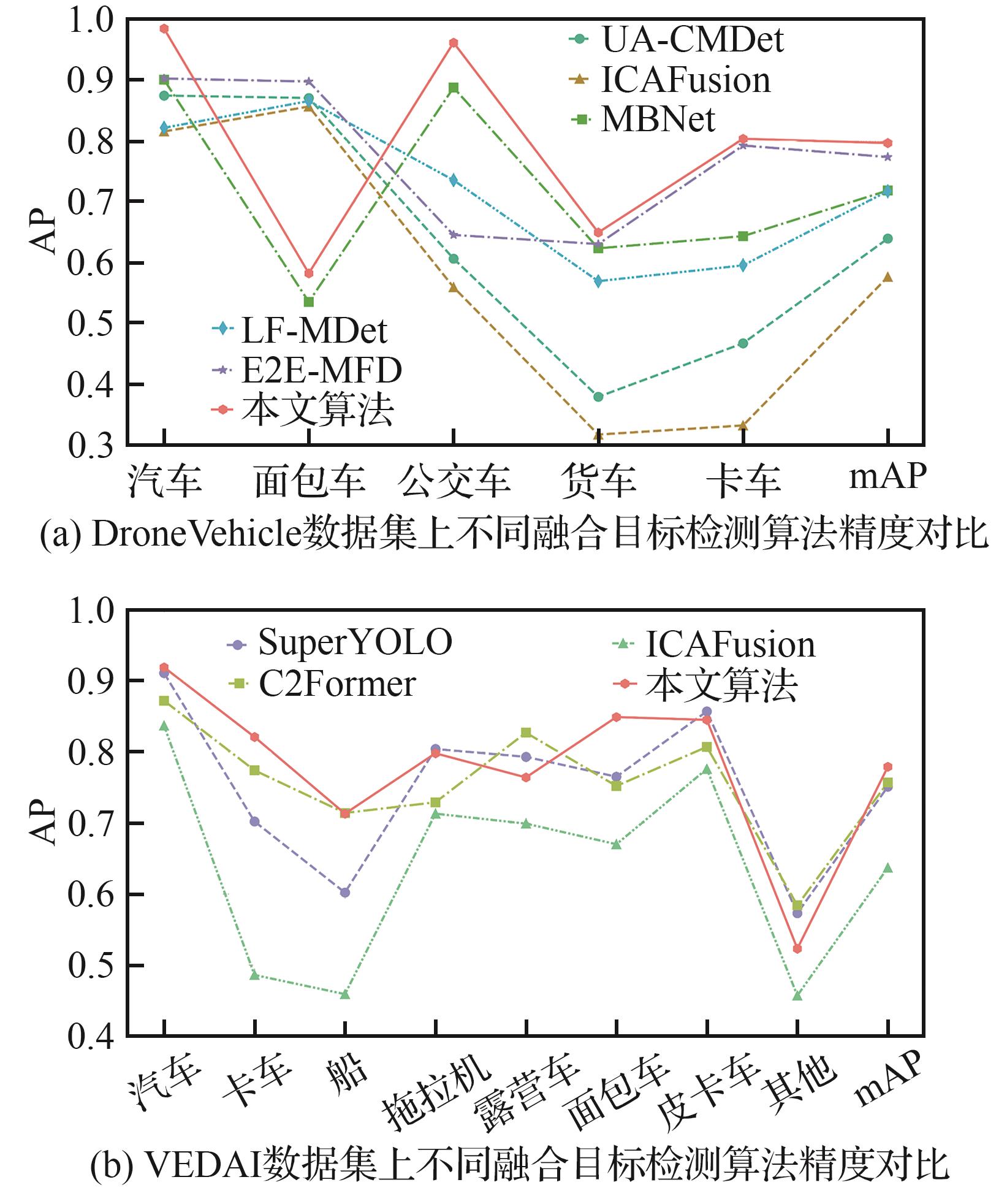

Fig.7
Visualization results of different object detection methods on DroneVehicle dataset
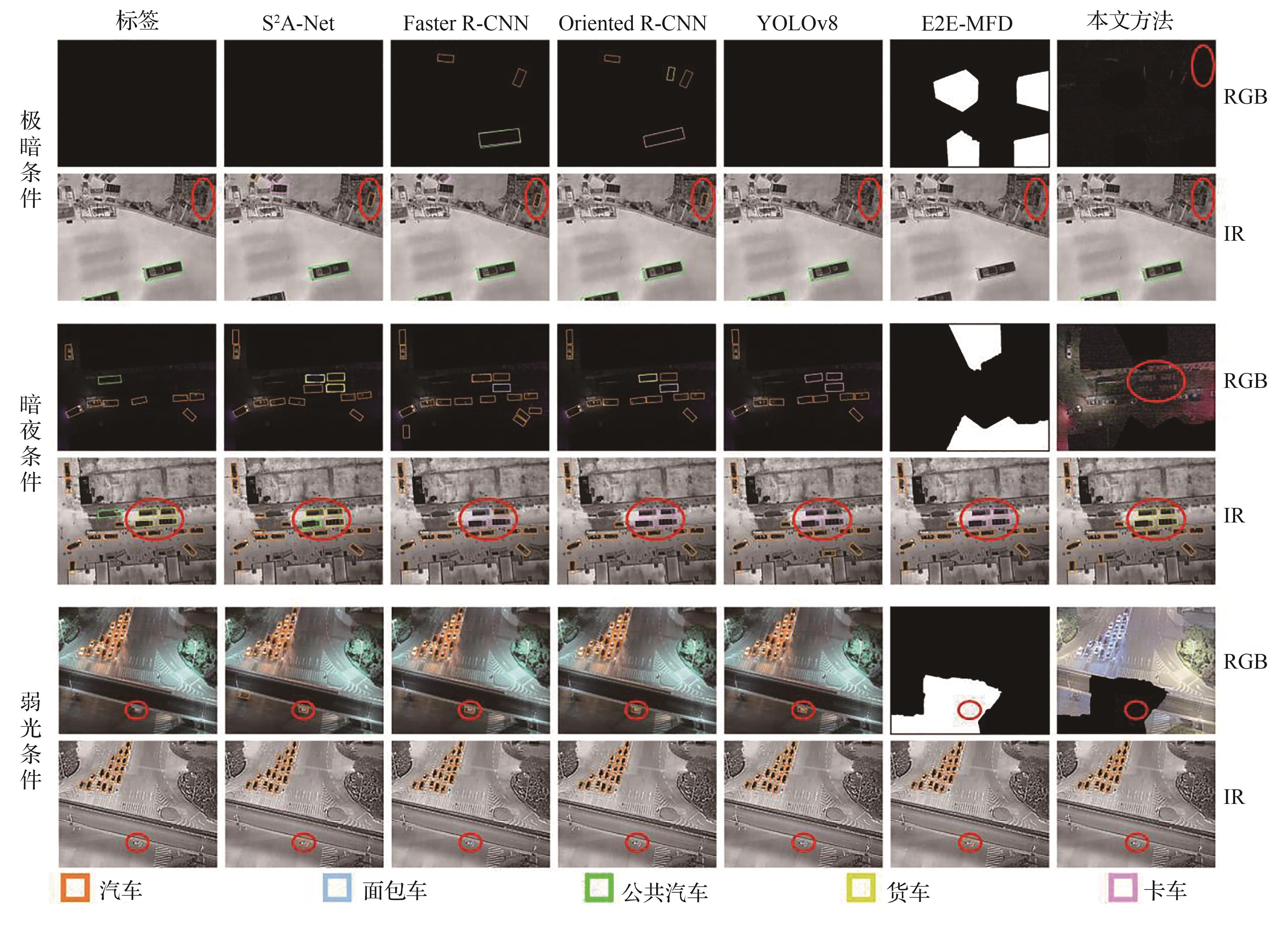
Table 4
Comparison of ablation experimental results of different modules
| SDIM | LIIE | MFCF | mAP50 |
|---|---|---|---|
| √ | 0.787 | ||
| √ | 0.788 | ||
| √ | 0.774 | ||
| √ | √ | 0.792 | |
| √ | √ | √ | 0.797 |
Table 5
Comparison of ablation experimental results with different iteration parameters
| 模块 | 迭代次数 | mAP50 |
|---|---|---|
| LIIE | 2 | 0.614 |
| 4 | 0.627 | |
| 8 | 0.631 | |
| 10 | 0.622 | |
| 16 | 0.612 |
Table 6
Comparison of ablation experimental results using different fusion methods
| 编码层融合 | 解码层融合 | 编码-解码融合 | mAP50 |
|---|---|---|---|
| 相加 | 相加 | 相加 | 0.792 |
| 相加 | 相加 | 交叉注意力 | 0.789 |
| 交叉注意力 | 交叉注意力 | 相加 | 0.797 |
| 交叉注意力 | 交叉注意力 | 交叉注意力 | 0.784 |

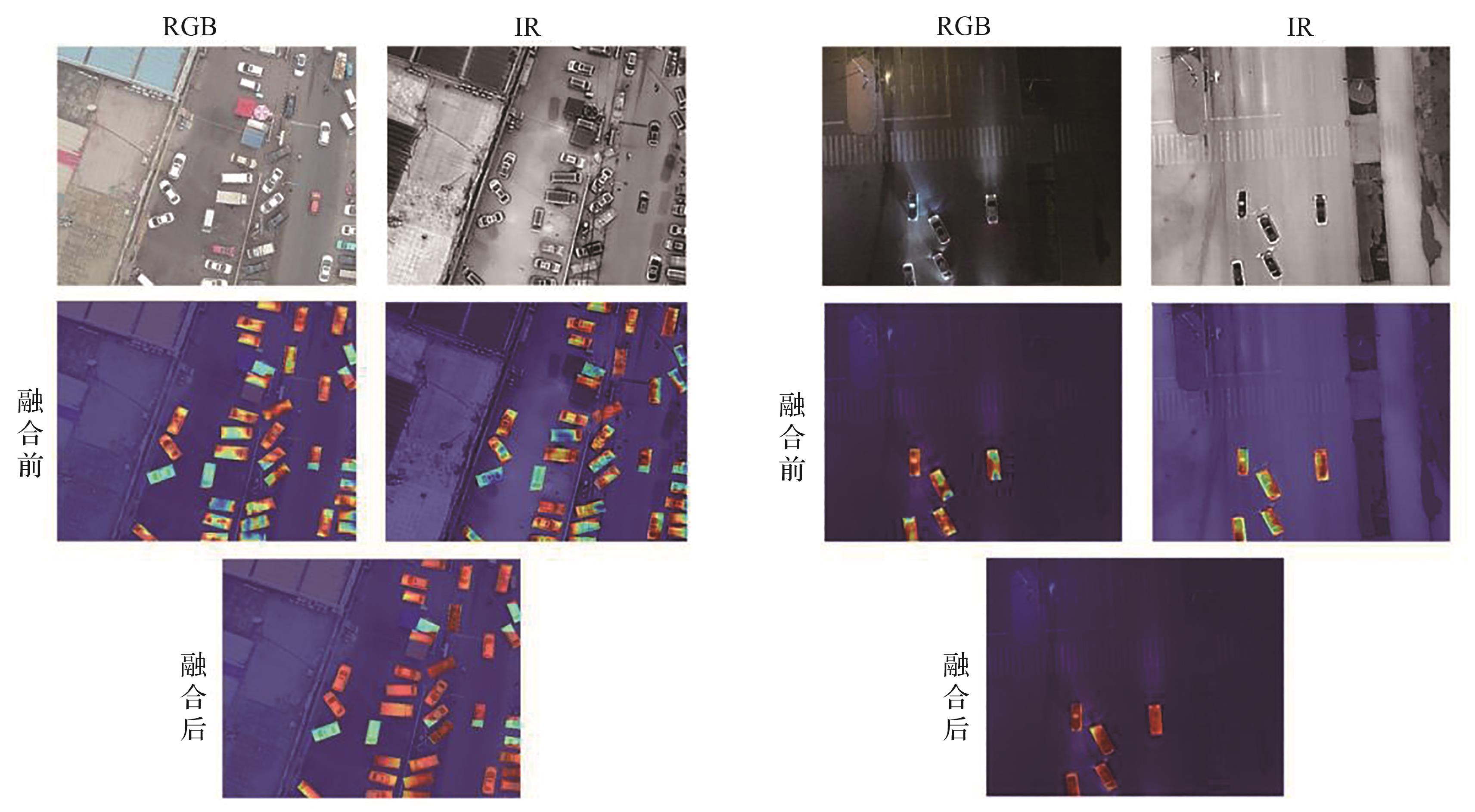
Fig.8
Comparison of feature heatmaps before and after MFCF module fusion
| [1] | SUN Y M, CAO B, ZHU P F, et al. Drone-based RGB-infrared cross-modality vehicle detection via uncertainty-aware learning[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2022, 32(10): 6700-6713. |
| [2] | ZHU Y H, SUN X Y, WANG M, et al. Multi-modal feature pyramid transformer for RGB-infrared object detection[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(9): 9984-9995. |
| [3] | 吴一全, 童康. 基于深度学习的无人机航拍图像小目标检测研究进展[J]. 航空学报, 2025, 46(3): 181-207. |
| WU Y Q, TONG K. Research advances on deep learning-based small object detection in UAV aerial images[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 181-207 (in Chinese). | |
| [4] | SHANG X P, LI N N, LI D J, et al. CCLDet: A cross-modality and cross-domain low-light detector[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(3): 3284-3294. |
| [5] | LI C Y, SONG D, TONG R F, et al. Illumination-aware faster R-CNN for robust multispectral pedestrian detection[J]. Pattern Recognition, 2019, 85: 161-171. |
| [6] | LIU X Y, QI J H, CHEN C, et al. Relation-aware weight sharing in decoupling feature learning network for UAV RGB-infrared vehicle re-identification[J]. IEEE Transactions on Multimedia, 2024, 26: 9839-9853. |
| [7] | WANG J P, XU C A, ZHAO C H, et al. Multimodal object detection of UAV remote sensing based on joint representation optimization and specific information enhancement[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2024, 17: 12364-12373. |
| [8] | YUAN M X, SHI X R, WANG N, et al. Improving RGB-infrared object detection with cascade alignment-guided transformer[J]. Information Fusion, 2024, 105: 102246. |
| [9] | GUAN D Y, CAO Y P, YANG J X, et al. Fusion of multispectral data through illumination-aware deep neural networks for pedestrian detection[J]. Information Fusion, 2019, 50: 148-157. |
| [10] | WANG Q W, CHI Y K, SHEN T, et al. Improving RGB-infrared object detection by reducing cross-modality redundancy[J]. Remote Sensing, 2022, 14(9): 2020. |
| [11] | SUN X, YU Y H, CHENG Q. Low-rank multimodal remote sensing object detection with frequency filtering experts[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5637114. |
| [12] | ZHAO D W, SHAO F M, ZHANG S, et al. Advanced object detection in low-light conditions: Enhancements to YOLOv7 framework[J]. Remote Sensing, 2024, 16(23): 4493. |
| [13] | HUI Y M, WANG J, LI B. WSA-YOLO: Weak-supervised and adaptive object detection in the low-light environment for YOLOV7[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 2507012. |
| [14] | MORAWSKI I, CHEN Y, LIN Y S, et al. GenISP: Neural ISP for low-light machine cognition[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway: IEEE Press, 2022. |
| [15] | ELGUEBALY T, BOUGUILA N. Finite asymmetric generalized Gaussian mixture models learning for infrared object detection[J]. Computer Vision and Image Understanding, 2013, 117(12): 1659-1671. |
| [16] | 江泽涛, 翟丰硕, 钱艺, 等. 结合特征增强和多尺度感受野的低照度目标检测[J]. 计算机研究与发展, 2023, 60(4): 903-915. |
| JIANG Z T, ZHAI F S, QIAN Y, et al. Low illumination object detection combined with feature enhancement and MultiScale receptive field[J]. Journal of Computer Research and Development, 2023, 60(4): 903-915 (in Chinese). | |
| [17] | JIA X Y, ZHU C, LI M Z, et al. LLVIP: A visible-infrared paired dataset for low-light vision[C]∥2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). Piscataway: IEEE Press, 2021: 3489-3497. |
| [18] | LOH Y P, CHAN C S. Getting to know low-light images with the Exclusively Dark dataset[J]. Computer Vision and Image Understanding, 2019, 178: 30-42. |
| [19] | PENG D X, DING W, ZHEN T. A novel low light object detection method based on the YOLOv5 fusion feature enhancement[J]. Scientific Reports, 2024, 14: 4486. |
| [20] | LIU S W, HE H, ZHANG Z C, et al. LI-YOLO: An object detection algorithm for UAV aerial images in low-illumination scenes[J]. Drones, 2024, 8(11): 653. |
| [21] | 江泽涛, 肖芸, 张少钦, 等. 基于Dark-YOLO的低照度目标检测方法[J]. 计算机辅助设计与图形学学报, 2023, 35(3): 441-451. |
| JIANG Z T, XIAO Y, ZHANG S Q, et al. Low-illumination object detection method based on dark-YOLO[J]. Journal of Computer-Aided Design & Computer Graphics, 2023, 35(3): 441-451 (in Chinese). | |
| [22] | DU Z P, SHIT M, DENG J K. Boosting object detection with zero-shot day-night domain adaptation[C]∥2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2024: 12666-12676. |
| [23] | WANG W J, WANG X H, YANG W H, et al. Unsupervised face detection in the dark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(1): 1250-1266. |
| [24] | SASAGAWA Y, NAGAHARA H. YOLO in the dark-domain adaptation method for merging multiple models[C]∥Computer Vision-ECCV 2020. Cham: Springer International Publishing, 2020: 345-359. |
| [25] | GUO C L, LI C Y, GUO J C, et al. Zero-reference deep curve estimation for low-light image enhancement[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020. |
| [26] | ZHANG L, LIU Z Y, ZHU X Y, et al. Weakly aligned feature fusion for multimodal object detection[J]. IEEE Transactions on Neural Networks and Learning Systems, 2025, 36(3): 4145-4159. |
| [27] | LIU Y, JIANG W S. Frequency mining and complementary fusion network for RGB-infrared object detection[J]. IEEE Geoscience and Remote Sensing Letters, 2024, 21: 5004605. |
| [28] | RAZAKARIVONY S, JURIE F. Vehicle detection in aerial imagery: A small target detection benchmark[J]. Journal of Visual Communication and Image Representation, 2016, 34: 187-203. |
| [29] | ZHANG J Q, LEI J, XIE W Y, et al. SuperYOLO: Super resolution assisted object detection in multimodal remote sensing imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5605415. |
| [30] | JIN S P, YU B B, JING M H, et al. DarkVisionNet: Low-light imaging via RGB-NIR fusion with deep inconsistency prior[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(1): 1104-1112. |
| [31] | SHARMA M, DHANARAJ M, KARNAM S, et al. YOLOrs: Object detection in multimodal remote sensing imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 14: 1497-1508. |
| [32] | CHEN J, DING J F, MA J Y. HitFusion: Infrared and visible image fusion for high-level vision tasks using transformer[J]. IEEE Transactions on Multimedia, 2024, 26: 10145-10159. |
| [33] | 李峻宇, 刘乾坤, 付莹. 融合注意力机制的红外小目标检测[J]. 航空学报, 2024, 45(14): 628959. |
| LI J Y, LIU Q K, FU Y. Infrared small object detection based on attention mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 628959 (in Chinese). | |
| [34] | ACHANTA R, SHAJI A, SMITH K, et al. SLIC superpixels compared to state-of-the-art superpixel methods[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(11): 2274-2282. |
| [35] | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016. |
| [36] | CHEN L W, GU L, LI L, et al. Frequency dynamic convolution for dense image prediction[C]∥2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2025. |
| [37] | CHEN L W, FU Y, WEI K X, et al. Instance segmentation in the dark[J]. International Journal of Computer Vision, 2023, 131(8): 2198-2218. |
| [38] | HAN J M, DING J, LI J, et al. Align deep features for oriented object detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 5602511. |
| [39] | YANG Z, LIU S H, HU H, et al. RepPoints: Point set representation for object detection[C]∥2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2019: 9656-9665. |
| [40] | YANG X, YAN J C, FENG Z M, et al. R3Det: Refined single-stage detector with feature refinement for rotating object[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(4): 3163-3171. |
| [41] | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| [42] | XIE X X, CHENG G, WANG J B, et al. Oriented R-CNN for object detection[C]∥2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2021: 3500-3509. |
| [43] | JOCHER G, QIU J, CHAURASIA A. Ultralytics YOLO[EB/OL]. (2023-01) [2025-02-28]. . |
| [44] | ZHANG H, LI F, LIU S L, et al. DINO: DETR with improved denoising anchor boxes for end-to-end object detection[DB/OL]. arXiv: , 2022. |
| [45] | TIAN Z, SHEN C H, CHEN H, et al. FCOS: Fully convolutional one-stage object detection[C]∥2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2019: 9626-9635. |
| [46] | CHEN L W, FU Y, GU L, et al. Frequency-aware feature fusion for dense image prediction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(12): 10763-10780. |
| [47] | CHEN L W, GU L, ZHENG D Z, et al. Frequency-adaptive dilated convolution for semantic segmentation[C]∥2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2024: 3414-3425. |
| [48] | SHEN J F, CHEN Y F, LIU Y, et al. ICAFusion: Iterative cross-attention guided feature fusion for multispectral object detection[J]. Pattern Recognition, 2024, 145: 109913. |
| [49] | ZHOU K L, CHEN L S, CAO X. Improving multispectral pedestrian detection by addressing modality imbalance problems[C]∥Computer Vision-ECCV 2020. Cham: Springer, 2020: 787-803. |
| [50] | ZHANG J Q, CAO M X, XIE W Y, et al. E2E-MFD: Towards end-to-end synchronous multimodal fusion detection[C]∥NIPS’24: Proceedings of the 38th International Conference on Neural Information Processing Systems. Curran Associates Inc., 2024: 52296-52322. |
| [51] | YUAN M X, WEI X X. C²Former: Calibrated and complementary transformer for RGB-infrared object detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5403712. |
| [1] | Jiong HE, Binwu REN, Siliang DU, Yousong XU, Bo WANG. Adaptive attitude control for tilt-quadrotor UAV based on ADRC-RBF [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732189-732189. |
| [2] | Xiangyu YU, Wen LI, Jie YAN, Shizhe LIANG. Simulation research on thermal management system of fuel cell for liquid hydrogen powered UAV [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 630964-630964. |
| [3] | Pengqian YANG, Yutong CHEN, Junhui LIU, Jiehao YANG, Jiayuan SHAN, Shijun SUN. Aerodynamic and operational characteristics analysis for tandem wing cargo UAV at high angle of attack [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 131056-131056. |
| [4] | Rongzu LI, Li LIU, Dun YANG. Optimal design of hydrogen-powered UAV based on multi-source domain fusion surrogate model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 630979-630979. |
| [5] | Jianyu XU, Li ZHOU, Zhanxue WANG, Jie SHI, Hao SHI. Calculation method for hypersonic plume infrared radiation based on a fast line-by-line calculation model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 630778-630778. |
| [6] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [7] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [8] | Lingjie MENG, Hongguang LI, Xinjun LI. SAR image simulation method guided by geomorphic category information [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(7): 331003-331003. |
| [9] | Jinwu XIANG, Kai MA, Zi KAN, Daochun LI, Kexin ZHENG, Hanxuan CHEN. Review of key technologies for hydrogen powered unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531603-531603. |
| [10] | Qishuai DING, Bangjun LEI, Zhengping WU. A lightweight single object tracking algorithm for UAVs based on Siamese network [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330925-330925. |
| [11] | Zhihao ZHAO, Zhaohua YANG, Yun WU, Yuanjin YU. Single-photon counting imaging denoising method based on deep learning in low-light environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630531-630531. |
| [12] | Nuo MA, Shechun WEI, Junhui MENG, Qingyang LIU, Yusheng LEI. Flow field characteristics and dynamics of internal supply chamber separating from UAV considering effect of deceleration parachutes [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 130755-130755. |
| [13] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [14] | Wei HUANG, Jiahao PAN, Chu HE. Wavelet time-frequency localization-based model compression for UAV object detection [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631952-631952. |
| [15] | Tianqi FAN, Zhengxia ZOU, Zhenwei SHI. Typical remote sensing target detection with data synthesis based on reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631955-631955. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341