Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (13): 327904.doi: 10.7527/S1000-6893.2022.27904
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Jie ZHANG, Lin ZHAO, Fuxin YANG( ), Zhiguo SUN, Liang LI
), Zhiguo SUN, Liang LI
Received:2022-08-08
Revised:2022-09-05
Accepted:2022-10-21
Online:2023-07-15
Published:2022-11-04
Contact:
Fuxin YANG
E-mail:yangfuxin@hrbeu.edu.cn
Supported by:CLC Number:
Jie ZHANG, Lin ZHAO, Fuxin YANG, Zhiguo SUN, Liang LI. PPP integrity monitoring algorithm for general-purpose navigation applications[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(13): 327904.
Table 1
Undifferenced and uncombined PPP model
| 类别 | SF PPP | DF PPP | SDF PPP |
|---|---|---|---|
| 观测量数量 | 2n | 4m | 4m+2(n-m) |
| 估计参数数量 | 2n+5 | 3m+5 | 3m+2(n-m)+5 |
| 自由度 | -5 | m-5 | m-5 |
| 所需最小卫星数 | 秩亏 | ≥5颗双频卫星 | ≥5颗双频卫星 |
Fig.1
PPP fault tree in general-purpose navigation applications
Table 2
Experiment details and parameter settings
| 配置参数 | 数值 |
|---|---|
| 数据类型 | GPS(L1/L2) BDS(B1/B2) |
| 时间长度/h | 约5 |
| 采样间隔/Hz | 1 |
| 完好性风险/(10-4 h-1) | 1 |
| 连续性风险/(10-3 h-1) | 1 |
| 先验故障概率/10-4 | 3.3 |
Fig.2
Static experiment scenario
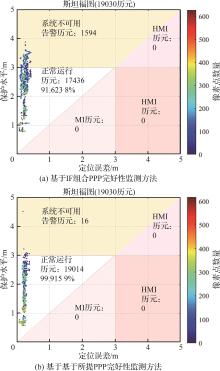
Fig.3
Stanford diagrams of different integrity monitoring algorithms based on static experiment
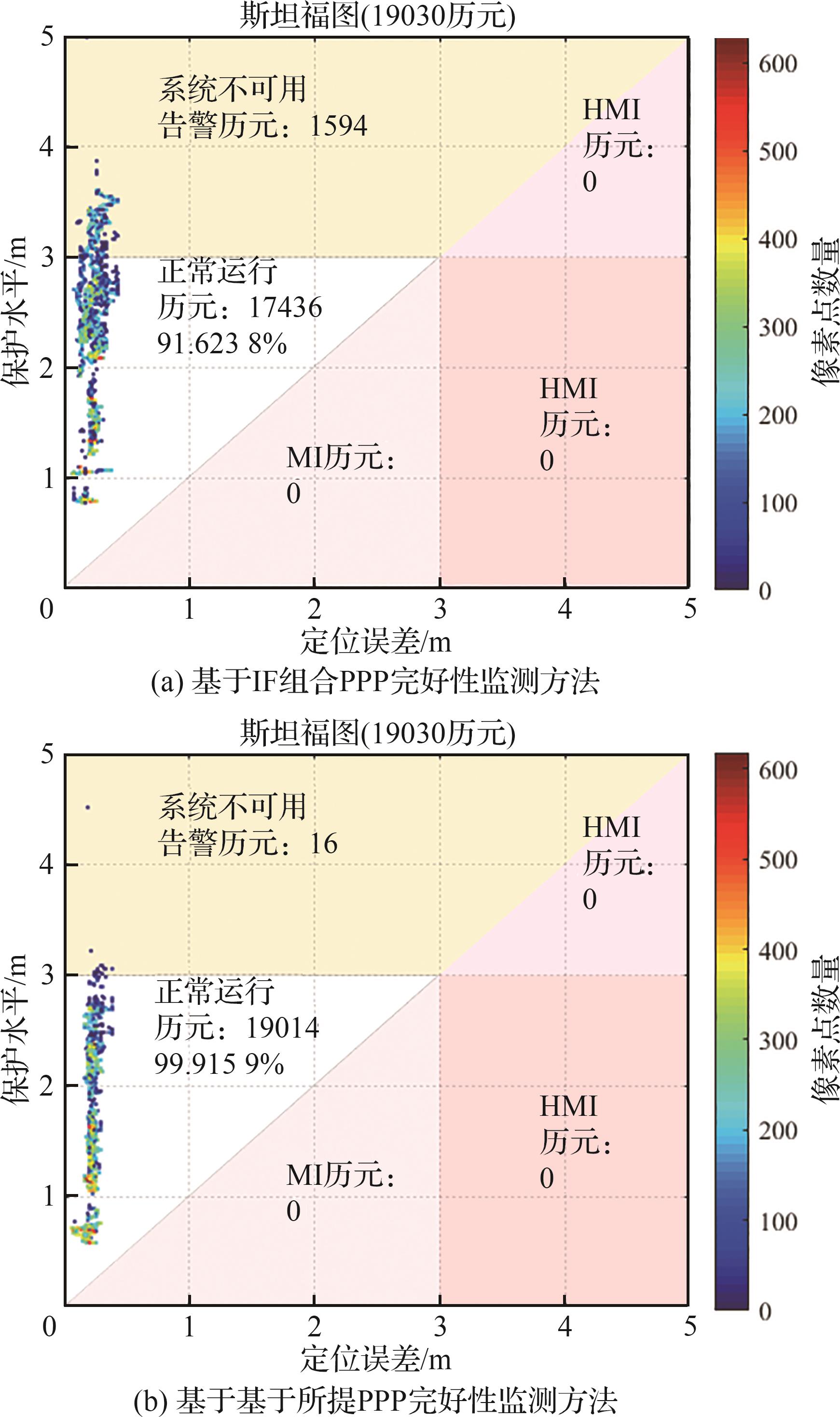

Fig.4
Available satellites and horizontal dilution of HDOP precision
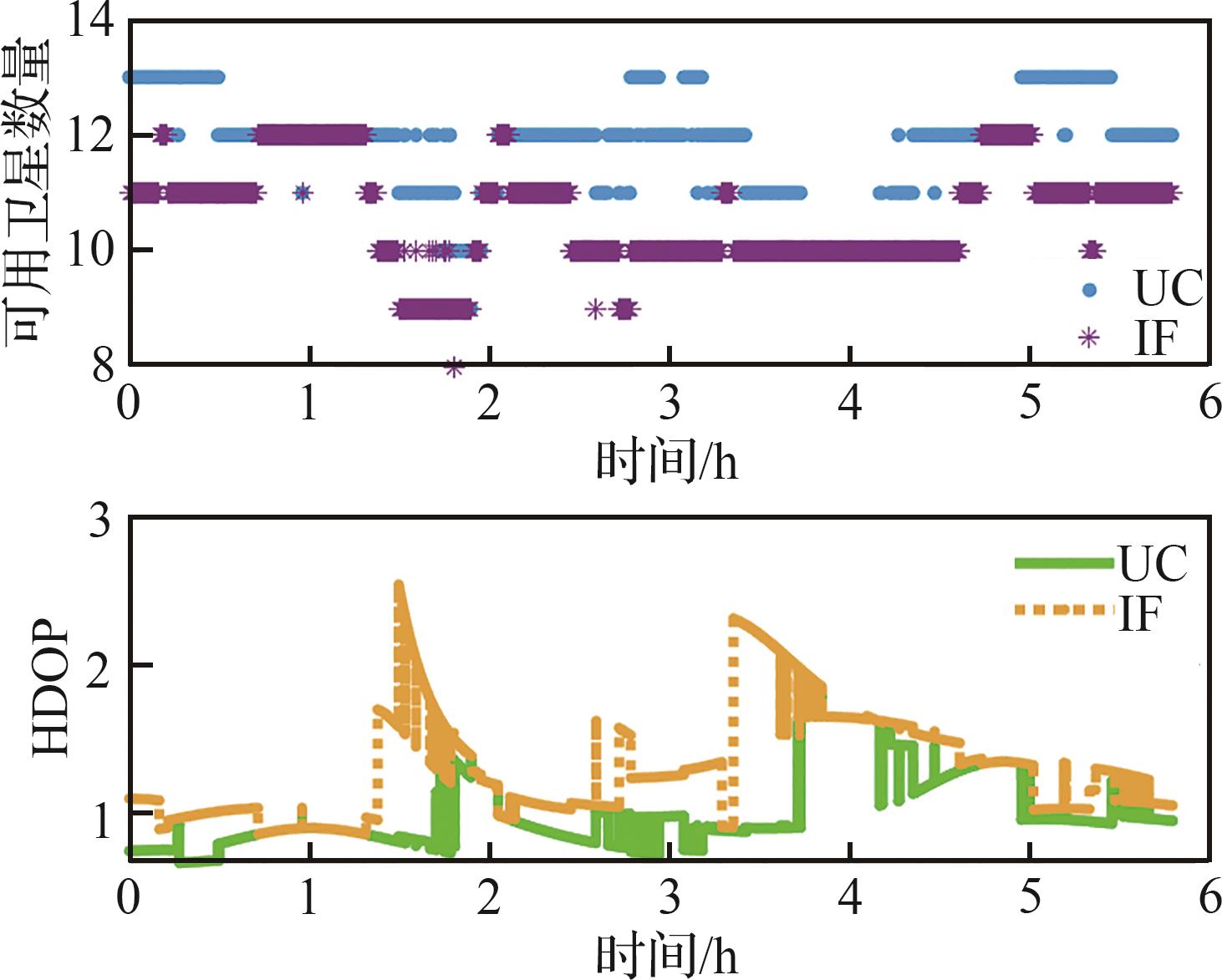
Table 3
Experiment details and parameter settings
| 配置参数 | 数值 |
|---|---|
| 数据类型 | GPS(L1/L2) BDS(B1/B2) |
| 采样间隔/Hz | 1 |
| 完好性风险/(10-4 h-1) | 1 |
| 连续性风险/(10-3 h-1) | 1 |
| 先验故障概率/10-4 | 3.3 |
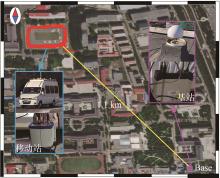
Fig.5
Kinematic experiment trajectory
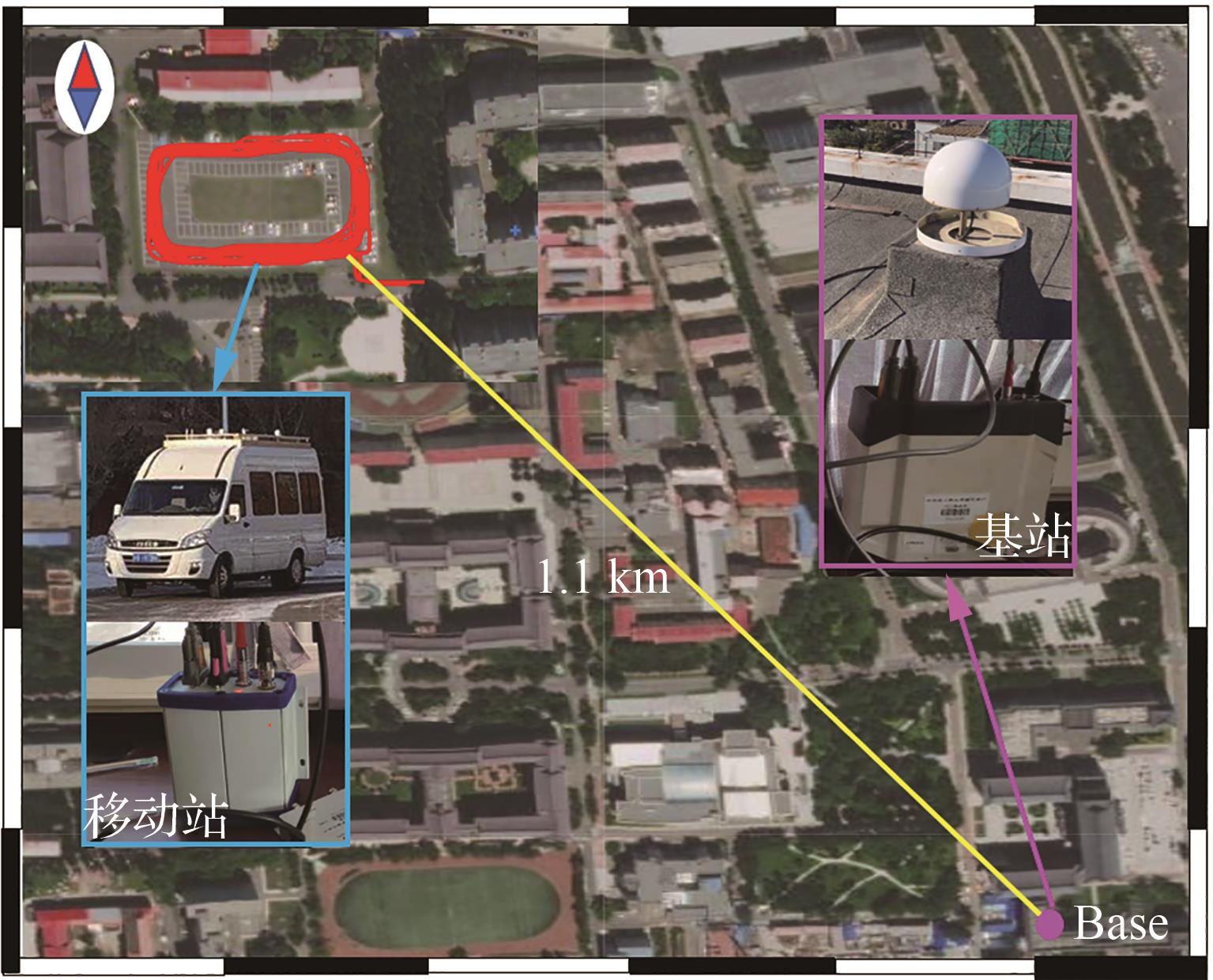

Fig.6
Stanford diagrams of different integrity monitoring algorithms based on 628e receiver


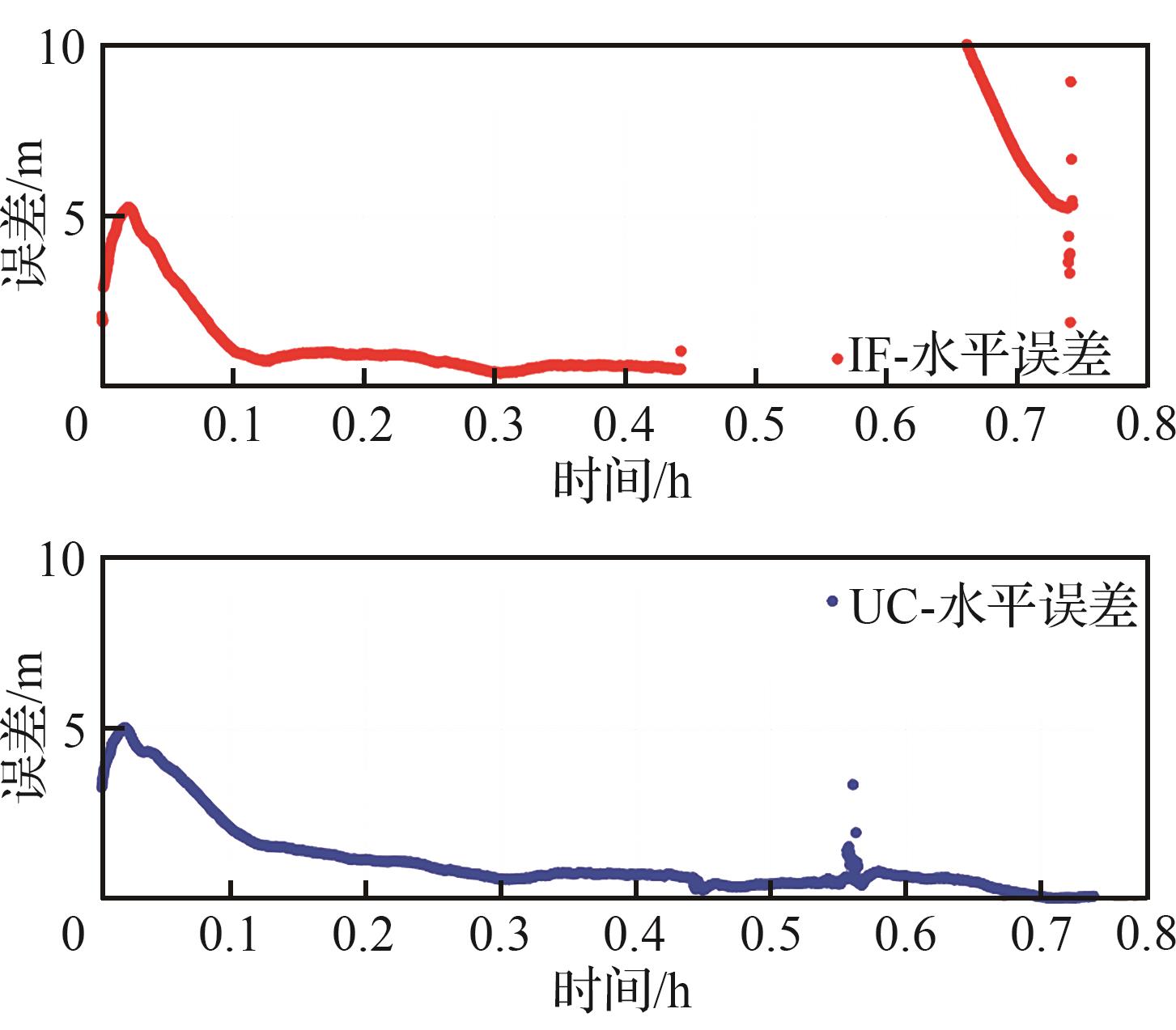
Fig.7
Horizontal positioning errors based on 628e receiver


Fig.8
Available satellites and HDOP
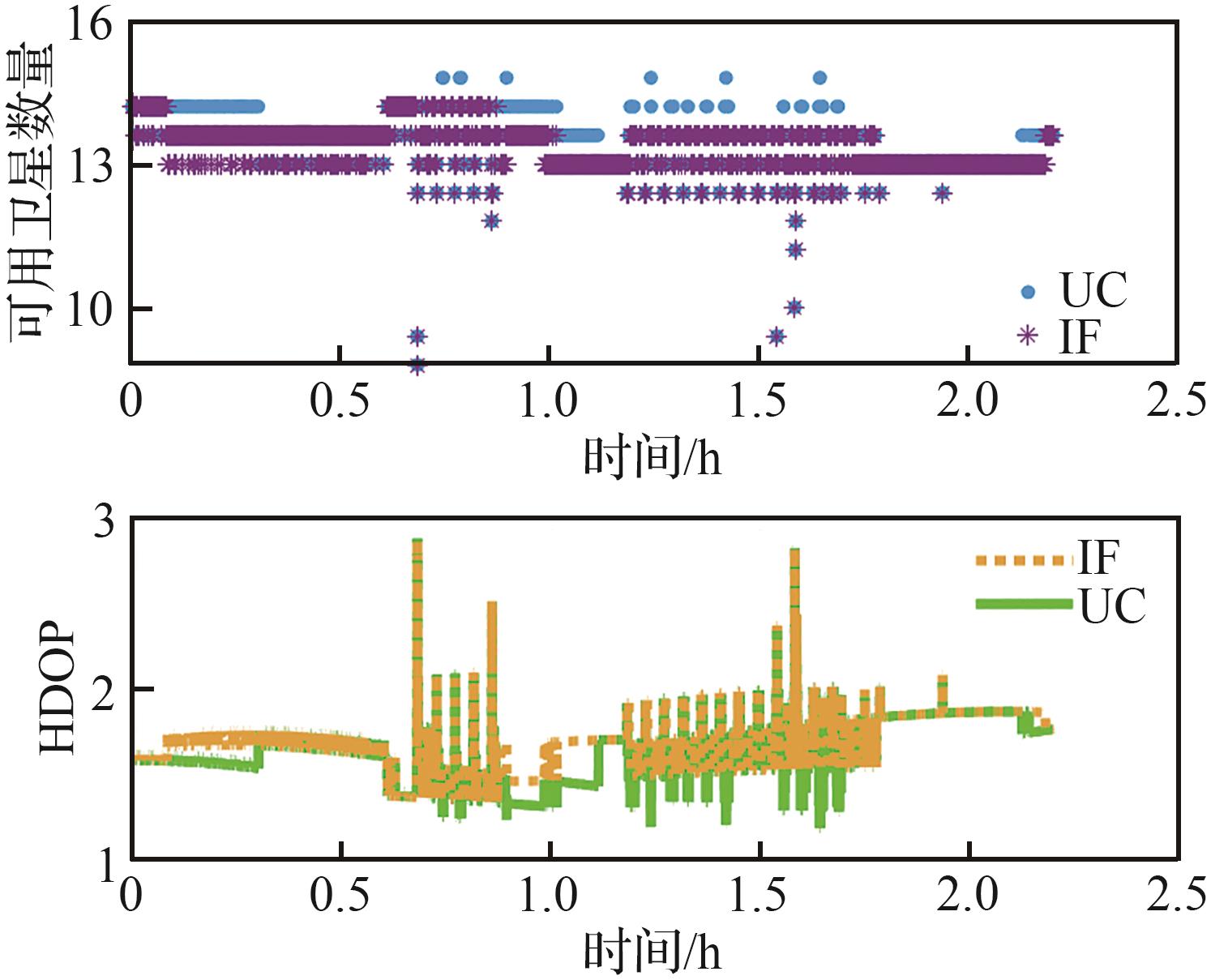
Fig.9
Stanford diagrams of integrity algorithms based on ublox receiver
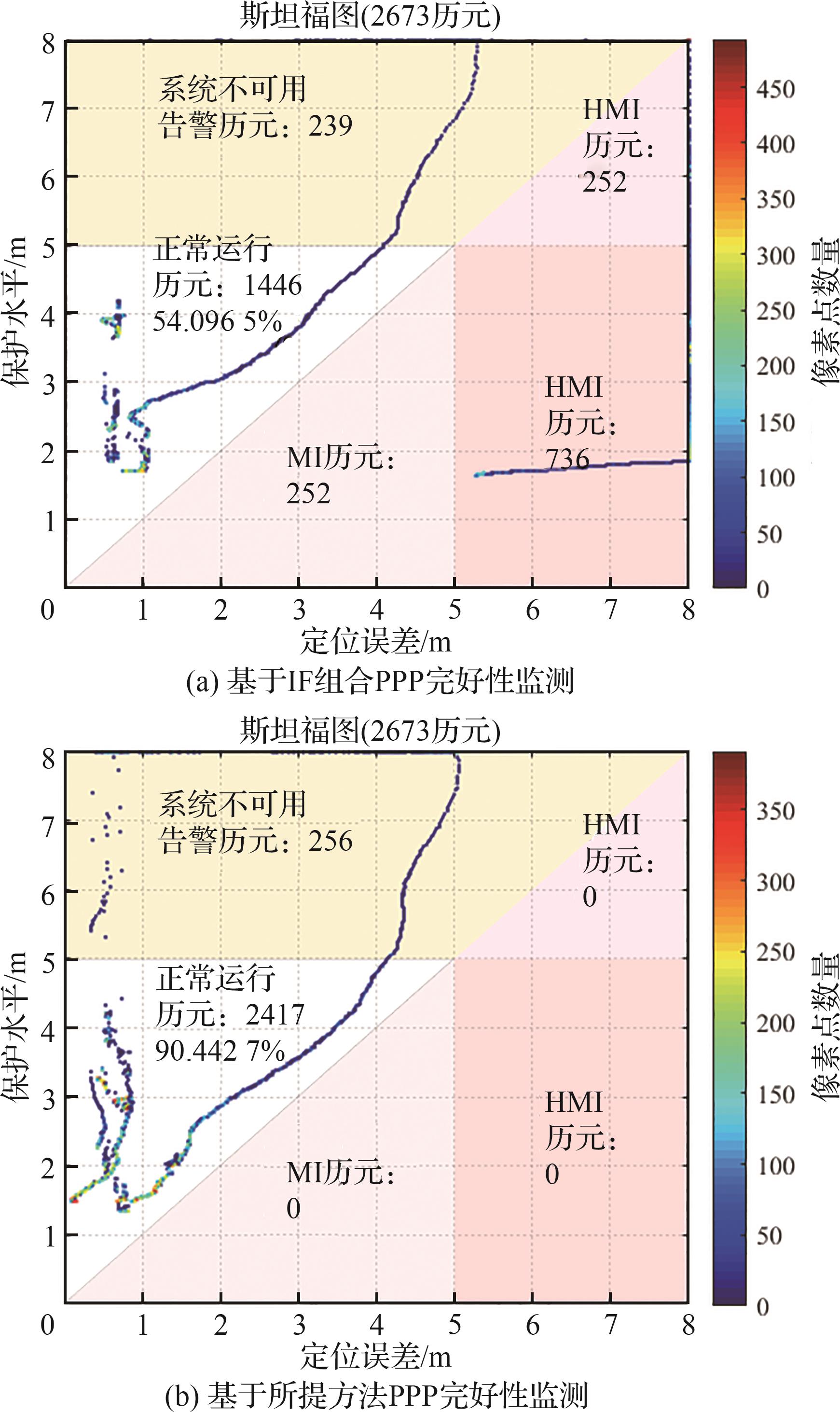

Fig.10
Horizontal positioning error based on ublox receiver
| 1 | YANG F X, ZHAO L, LI L, et al. Performance evaluation of kinematic BDS/GNSS real-time precise point positioning for maritime positioning[J]. Journal of Navigation, 2019, 72(1): 34-52. |
| 2 | WEINBACH U, BRANDL M, CHEN X M, et al. Integrity of the Trimble@CenterPoint RTX correction service[C]∥ Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018). Manassas: ION, 2018: 1902-1909. |
| 3 | DU Y J, WANG J L, RIZOS C, et al. Vulnerabilities and integrity of precise point positioning for intelligent transport systems: Overview and analysis[J]. Satellite Navigation, 2021, 2(1): 3. |
| 4 | LI L, WANG H, JIA C, et al. Integrity and continuity allocation for the RAIM with multiple constellations[J]. GPS Solutions, 2017, 21(4): 1503-1513. |
| 5 | INNAC A, GAGLIONE S, TROISI S, et al. A proposed fault detection and exclusion method applied to multi-GNSS single-frequency PPP[C]∥ 2018 European Navigation Conference (ENC). Piscataway: IEEE Press, 2018: 129-139. |
| 6 | GUNNING K, BLANCH J, WALTER T, et al. Design and evaluation of integrity algorithms for PPP in kinematic applications[C]∥ Proceedings of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+2018). Manassas: ION, 2018: 1910-1939. |
| 7 | BLANCH J, GUNNING K, WALTER T, et al. Reducing computational load in solution separation for Kalman filters and an application to PPP integrity[C]∥ The International Technical Meeting of the The Institute of Navigation. Manassas: ION, 2019: 720-729. |
| 8 | BLANCH J, WALTER T, NORMAN L, et al. Solution separation-based FD to mitigate the effects of local threats on PPP integrity[C]∥ 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS). Piscataway: IEEE Press, 2020: 1085-1092. |
| 9 | ZHANG J, ZHAO L, YANG F X, et al. Integrity monitoring for undifferenced and uncombined PPP under local environmental conditions[J]. Measurement Science and Technology, 2022, 33(6): 065010. |
| 10 | CAI C S, LIU Z Z, LUO X M. Single-frequency ionosphere-free precise point positioning using combined GPS and GLONASS observations[J]. Journal of Navigation, 2013, 66(3): 417-434. |
| 11 | STERLE O, STOPAR B, PAVLOVČIČ PREŠEREN P. Single-frequency precise point positioning: An analytical approach[J].Journal of Geodesy, 2015, 89(8): 793-810. |
| 12 | LI Q, LI L, YANG F X, et al. Research on precise point positioning method of BDS-2/BDS-3 mixed-frequency based on low-cost u-blox[M]∥Lecture Notes in Electrical Engineering. Berlin: Springer, 2021: 367-378. |
| 13 | 2021 Federal Radionavigation plan: DOT-VNTSC-OST-R-15-01[R]. Washington, D.C.: United States Department of Defense, United States Department of Homeland Security, United States Department of Transportation, 2022. |
| 14 | KOUBA J, HÉROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS Solutions, 2001, 5(2): 12-28. |
| 15 | 张小红, 左翔, 李盼. 非组合与组合PPP模型比较及定位性能分析[J]. 武汉大学学报(信息科学版), 2013, 38(5): 561-565. |
| ZHANG X H, ZUO X, LI P. Mathematic model and performance comparison between ionosphere-free combined and uncombined precise point positioning[J]. Geomatics and Information Science of Wuhan University, 2013, 38(5): 561-565 (in Chinese). | |
| 16 | 张宝成, 欧吉坤, 袁运斌, 等. 基于GPS双频原始观测值的精密单点定位算法及应用[J]. 测绘学报, 2010, 39(5): 478-483. |
| ZHANG B C, OU J K, YUAN Y B, et al. Precise point positioning algorithm based on original dual-frequency GPS code and carrier-phase observations and its application[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(5): 478-483 (in Chinese). | |
| 17 | ZHANG H P, GAO Z Z, GE M R, et al. On the convergence of ionospheric constrained precise point positioning (IC-PPP) based on undifferential uncombined raw GNSS observations[J]. Sensors, 2013, 13(11): 15708-15725. |
| 18 | ZHOU F, DONG D N, LI W W, et al. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations[J]. GPS Solutions, 2018, 22(2): 33. |
| 19 | BLANCH J, WALTER T, ENGE P. RAIM with optimal integrity and continuity allocations under multiple failures[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3): 1235-1247. |
| 20 | DEFRAIGNE P, BRUYNINX C. On the link between GPS pseudorange noise and day-boundary discontinuities in geodetic time transfer solutions[J]. GPS Solutions, 2007, 11(4): 239-249. |
| 21 | RIFE J, PULLEN S, ENGE P, et al. Paired overbounding for nonideal LAAS and WAAS error distributions[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(4): 1386-1395. |
| 22 | ZHAO L, ZHANG J, LI L, et al. Position-domain non-Gaussian error overbounding for ARAIM[J]. Remote Sensing, 2020, 12(12): 1992. |
| 23 | BLANCH J, WALTER T, ENGE P. Gaussian bounds of sample distributions for integrity analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(4): 1806-1815. |
| 24 | BLANCH J, WALTER T, ENGE P. A MATLAB toolset to determine strict Gaussian bounding distributions of a sample distribution[C]∥ Proceedings of the 30th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2017). Manassas: ION, 2017: 4236-4247. |
| 25 | NORMAN L, INFANTE E, DE GROOT L. Integrity performance for precise positioning in automotive[C]∥ Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019). Manassas: ION, 2019: 1653-1663. |
| [1] | Baoshi YU, Yongjun LEI, Zhibin SHEN, Dapeng ZHANG. Review on analysis and control technology of curing residual stress in solid motor propellants [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 31083-031083. |
| [2] | Xin XU, Liang LI, Jiaxiang LI, Jiachang JIANG, Yilin WEI. JPALS reference receivers topology design for ionospheric gradient monitoring [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331075-331075. |
| [3] | Dingqiang DAI, Xuan ZHOU, Leiting DONG, Xiasheng SUN. Research progress and prospects of digital engineering and digital twin in field of aeronautical fatigue and structural integrity [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(19): 531022-531022. |
| [4] | Yuan SONG, Rui LI, Zhigang HUANG. Allocation method of RTK integrity indicators [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331655-331655. |
| [5] | Jianhua CHENG, Sixiang CHENG, Bing QI, Shilong FAN, Guojing ZHAO, Sicheng CHEN. PPP/INS integrated navigation performance analysis in ionospheric scintillation environment [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730676-730676. |
| [6] | Jiaxiang LI, Jianhua CHENG, Liang LI, Zhibo NA, Chun JIA. Troposphere anomaly integrity monitoring parameters for GBAS [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328817-328817. |
| [7] | Yanyan LUO, Shuo YANG, Xiaosong PAN, Xuhuai ZHAO, Li ZHANG. Signal reflection suppression and optimized design of high⁃speed connectors for aerospace applications [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328937-328937. |
| [8] | Jing ZHAO, Dan SONG. Integrity monitoring method for GNSS/IMU integrated navigation system of UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328943-328943. |
| [9] | Ruijie LI, Liang LI, Jiachang JIANG, Li CHENG, Liuqi WANG. RAIM integrity risk estimation method based on worst multi⁃satellite faults searching [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(2): 328684-328684. |
| [10] | Zhijie YU, Yupei GUO, Hanbin SUN, Jingnan ZHANG, Xiasheng SUN. Recent progress in structural integrity of novel materials and advanced techniques [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(18): 29888-029888. |
| [11] | Hongwei LI, Xuelin LEI, Chengcheng ZHANG, Chaozong TANG, Shenglong KANG, Yalong CHEN, Lyuyi CHENG, Xiancheng ZHANG. Optimization of process parameters for multi⁃annular convex hull rotating cold expansion and extrusion reinforcement of GH4169 high⁃temperature alloy hole structures [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 429692-429692. |
| [12] | Xiangyu WANG, Jinhui WANG, Wenhao QIU, Jintao NIU, Xiuli FU, Yang QIAO. Material removal mechanism and surface integrity of cutting titanium aluminum alloy under different cooling conditions [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 629471-629471. |
| [13] | Xiuhong LI, Xingfu WANG, Wenhui LI, Haibin CHEN, Shengqiang YANG. Research progress on precision and performance synergistic finishing for aerospace engine critical components [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(13): 629860-629860. |
| [14] | YU Dalei, CUI Xining, LI Chengwen, LIU Tingting, ZHOU Yong. Multi-core computing and processing platform based on CPCIe high speed bus in airborne applications [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(5): 325238-325238. |
| [15] | PENG Zhenlong, ZHANG Xiangyu, ZHANG Deyuan. High-speed ultrasonic vibration cutting for difficult-to-machine materials in aerospace field [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(4): 525587-525587. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341