Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (7): 332547.doi: 10.7527/S1000-6893.2025.32547
• Electronics and Electrical Engineering and Control • Previous Articles
Wei XIONG1, Dong ZHANG1( ), Shuheng YANG1, Zhi REN1, Wenyi LIU2
), Shuheng YANG1, Zhi REN1, Wenyi LIU2
Received:2025-07-10
Revised:2025-08-11
Accepted:2025-11-10
Online:2025-11-26
Published:2025-11-25
Contact:
Dong ZHANG
Supported by:CLC Number:
Wei XIONG, Dong ZHANG, Shuheng YANG, Zhi REN, Wenyi LIU. Manned/unmanned aerial vehicle collaborative interpretable method for intelligent air combat[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(7): 332547.
Fig.1
Scenario of cooperative air combat involving manned/unmanned aerial vehicle
Fig.2
Confrontation situation of two-aircraft air combat
Fig.3
Explainable reinforcement learning framework
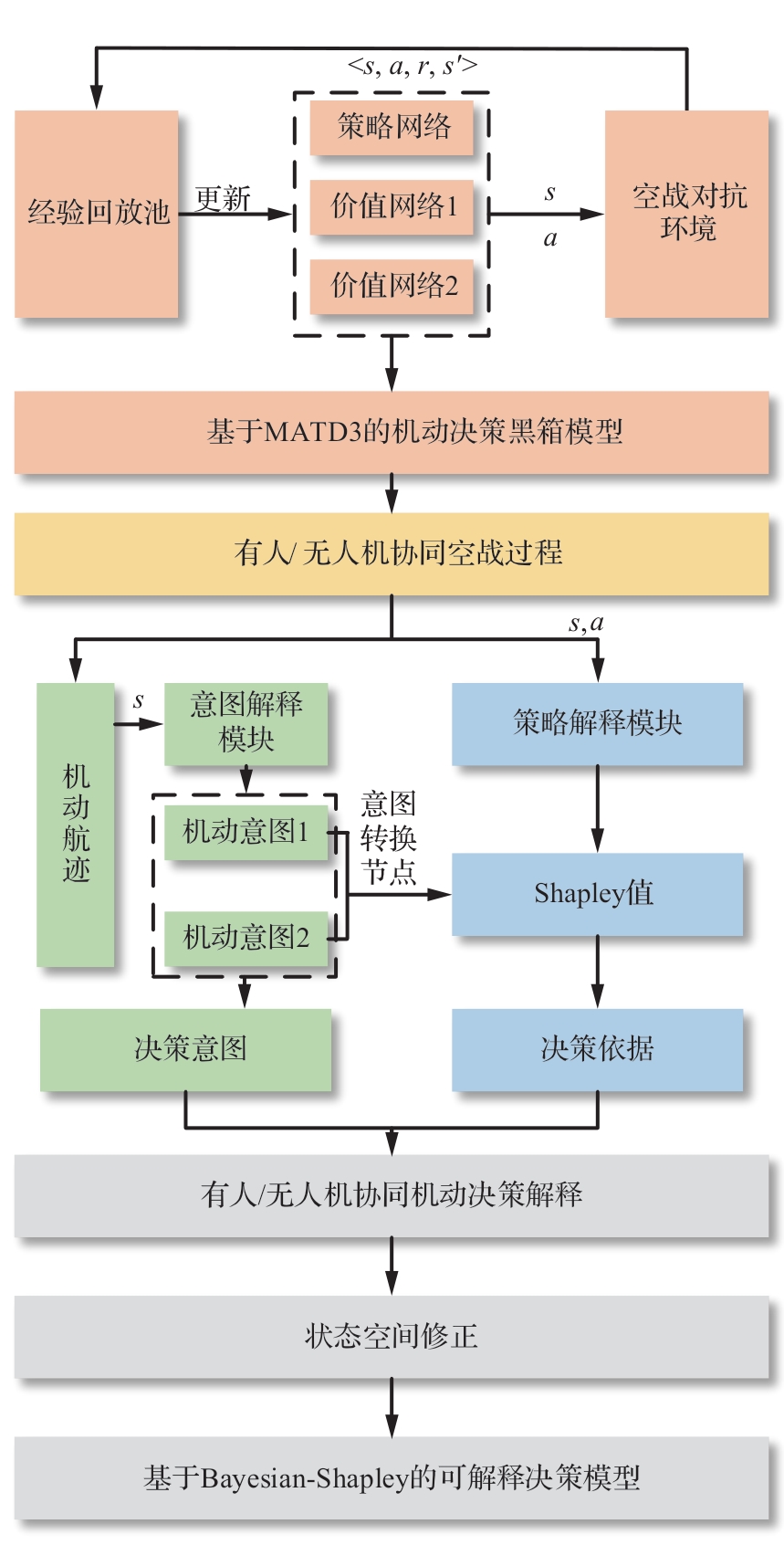
Fig.4
Dynamic Bayesian Networks for maneuver intent recognition
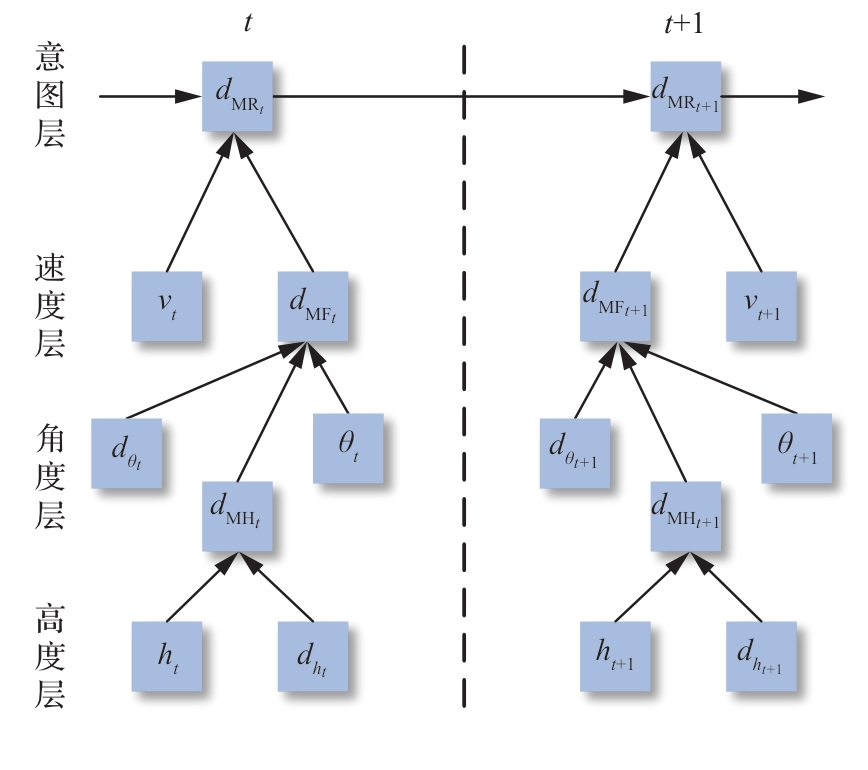
Table 1
Maneuver state parameter variation characteristics
| 机动类型 | 编号 | 机动状态 | 速度 | 速度偏角 | 速度偏角变化率 | 高度 | 高度变化率 |
|---|---|---|---|---|---|---|---|
| 直线类 | 1 | 平飞 | 保持 | 保持 | 保持 | 保持 | 保持 |
| 2 | 爬升 | 减小 | 保持 | 保持 | 增大 | 增大-减小 | |
| 3 | 俯冲 | 增大 | 保持 | 保持 | 减小 | 减小-增大 | |
| 盘旋类 | 4 | 左盘旋 | 保持 | 减小 | 保持 | 保持 | 保持 |
| 5 | 右盘旋 | 保持 | 增大 | 保持 | 保持 | 保持 | |
| 6 | 半滚倒转 | 增大 | 突变 | 突变 | 减小 | 增大-减小 | |
| 翻滚类 | 7 | 桶滚 | 减小 | 突变 | 突变 | 增大-减小 | 增大-减小 |
| 8 | 筋斗 | 增大 | 突变 | 突变 | 增大-减小 | 增大-减小 | |
| 9 | 半筋斗 | 减小 | 突变 | 突变 | 增大 | 增大-减小 | |
| 战斗转弯类 | 10 | 战斗转弯 | 减小-增大 | 突变 | 突变 | 增大-减小 | 增大-减小 |
Table 2
Manned aerial vehicle parameters of red side
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
Table 3
Unmanned aerial vehicle parameters of red side
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
Table 4
Unmanned aerial vehicle parameters of blue side
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
Table 5
Hyperparameter setting
| 参数 | 数值 |
|---|---|
| Actor学习率 | |
| Critic学习率 | |
| 软更新因子 | |
| 学习衰减率 | |
| 经验回放池容量 | |
| 抽取样本数 | |
| 学习间隔步长 | |
| 训练最大局数 |
Table 6
Environmental parameter setting
| 参数 | 数值 |
|---|---|
| 无人机数量 | 2 |
| 100 | |
| 蓝方初始位置 | (0,0,5) |
| 蓝方初始航向/(°) | |
| 有人机初始位置 | (100,0,5) |
| 有人机初始航向/(°) | [150,210] |
| 无人机1初始位置 | (60,30,5) |
| 无人机1初始航向/(°) | [150,210] |
| 无人机2初始位置 | |
| 无人机2初始航向/(°) | [150,210] |

Fig.5
Examples of training results
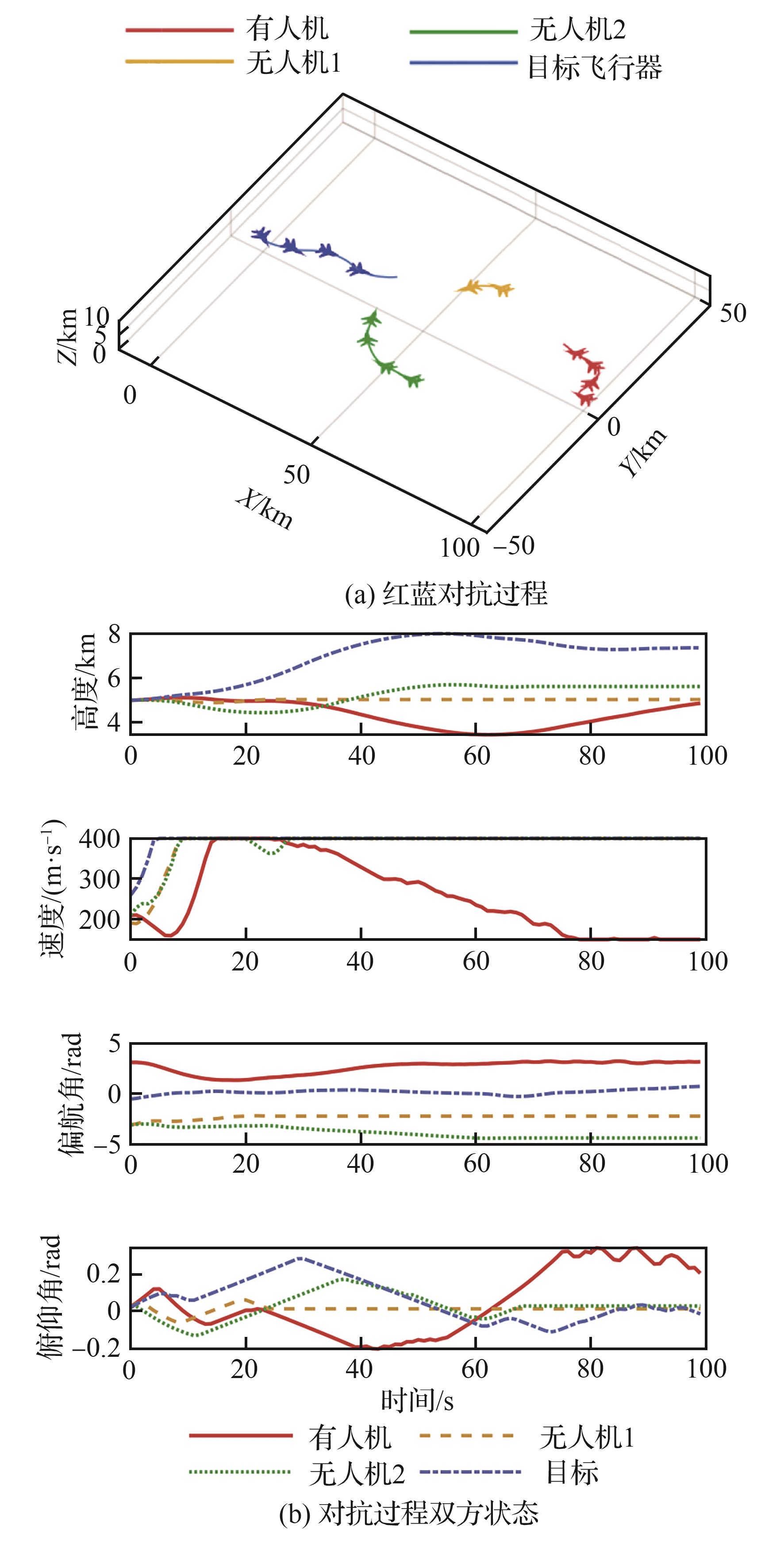
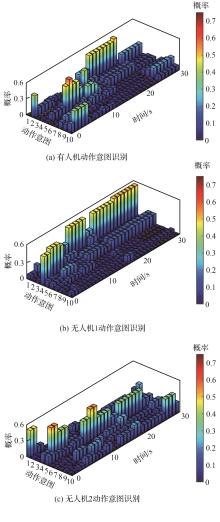
Fig.6
Action intention recognition in the first 30 s
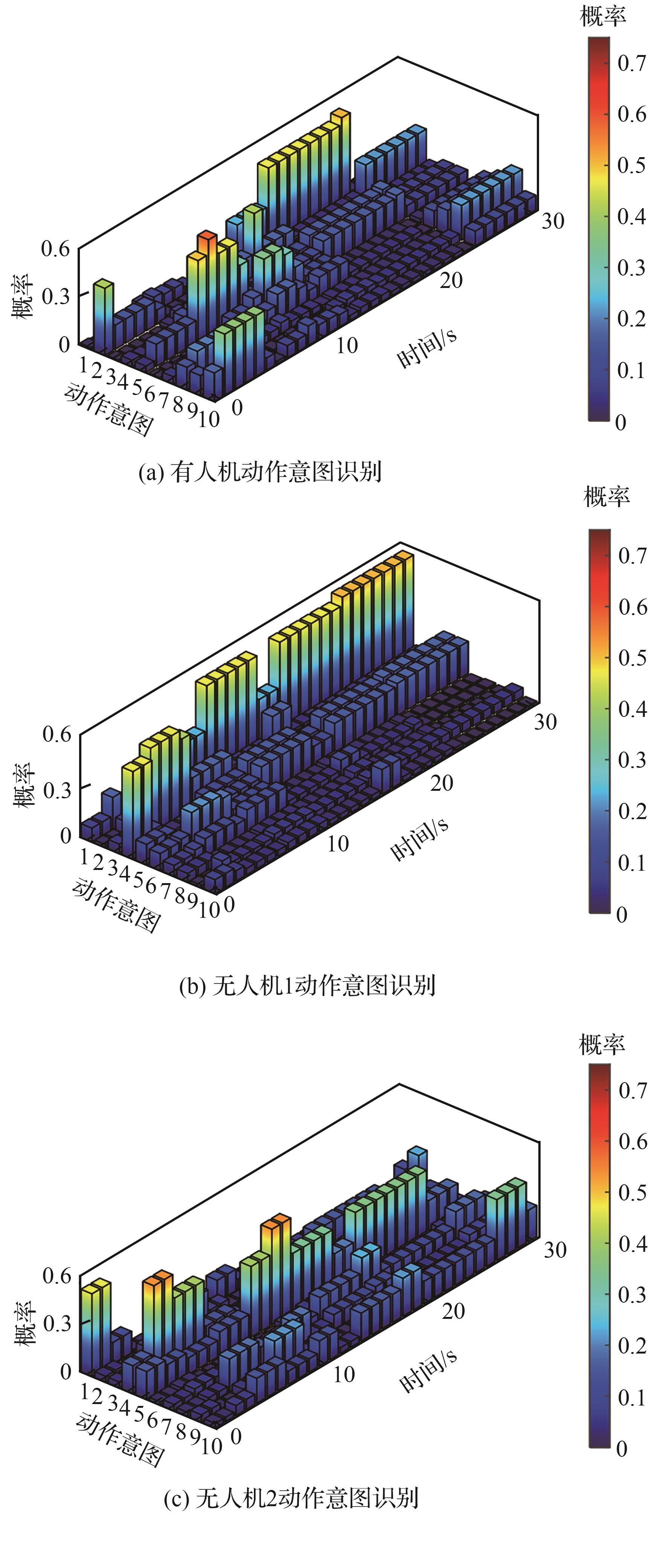
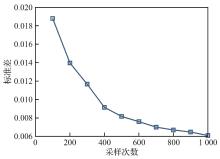
Fig.7
Error analysis of shapley value calculation
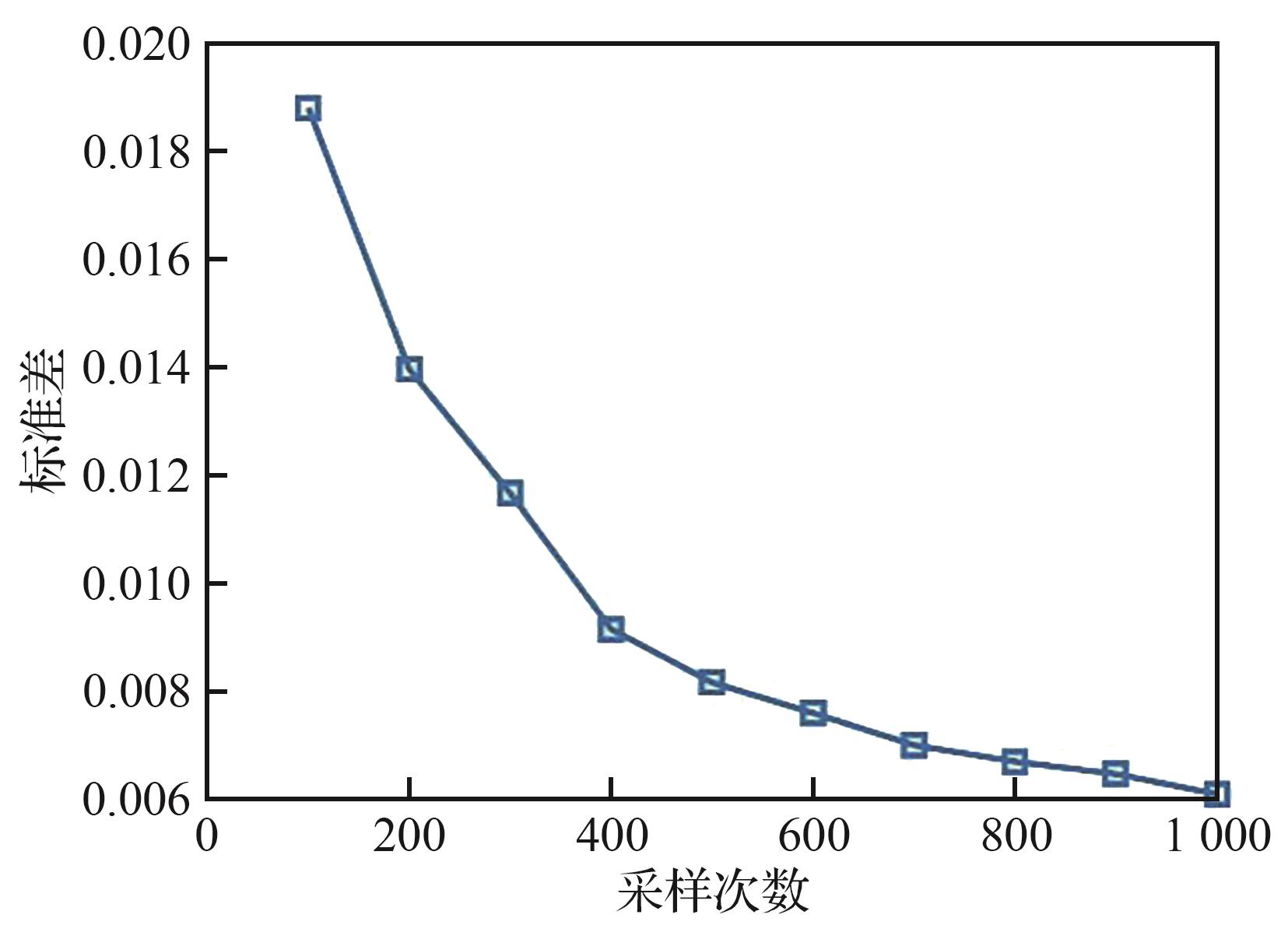

Fig.8
Ranking of state Shapley values within key nodes
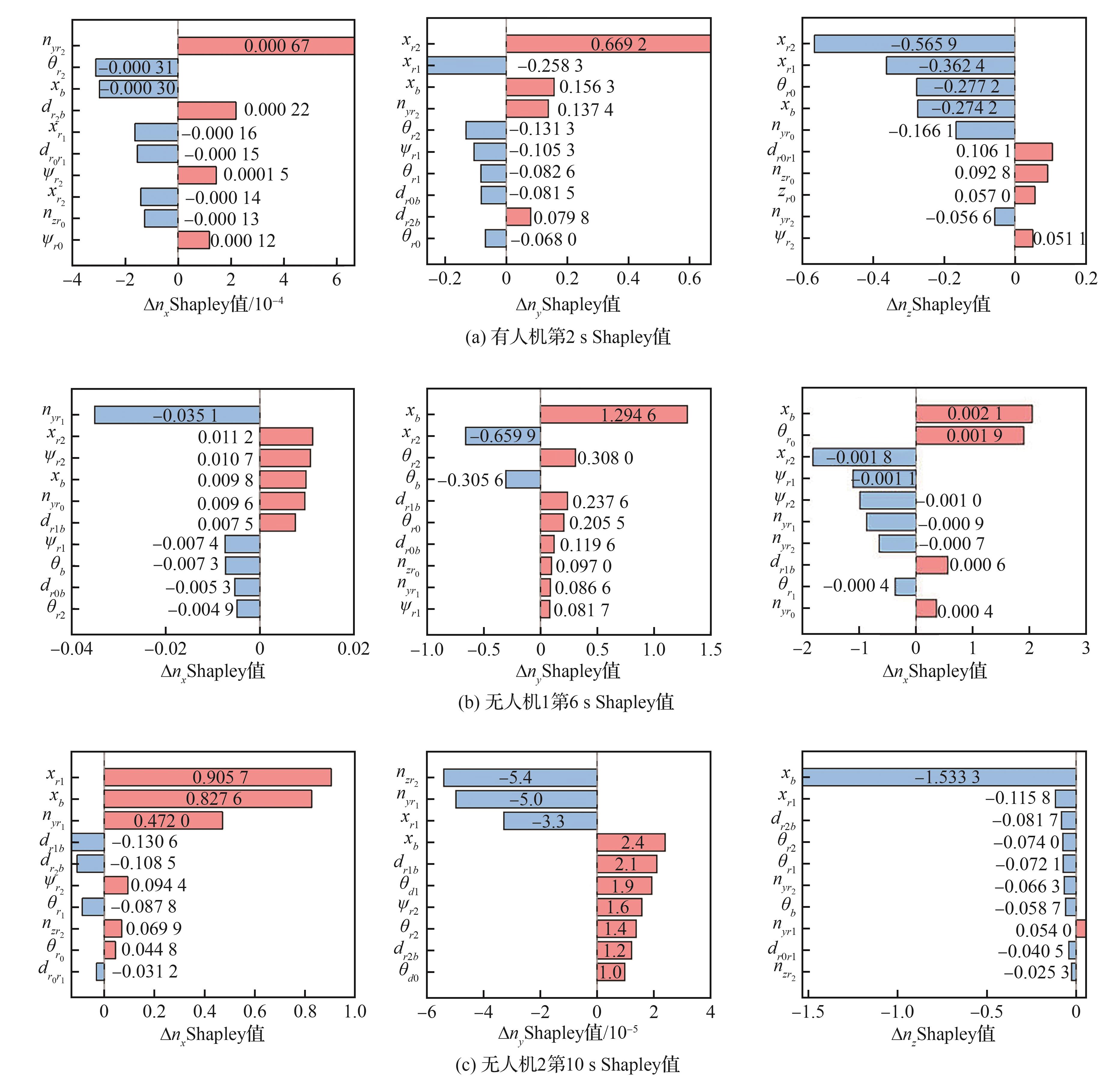

Fig.9
Ranking of cumulative contribution of states
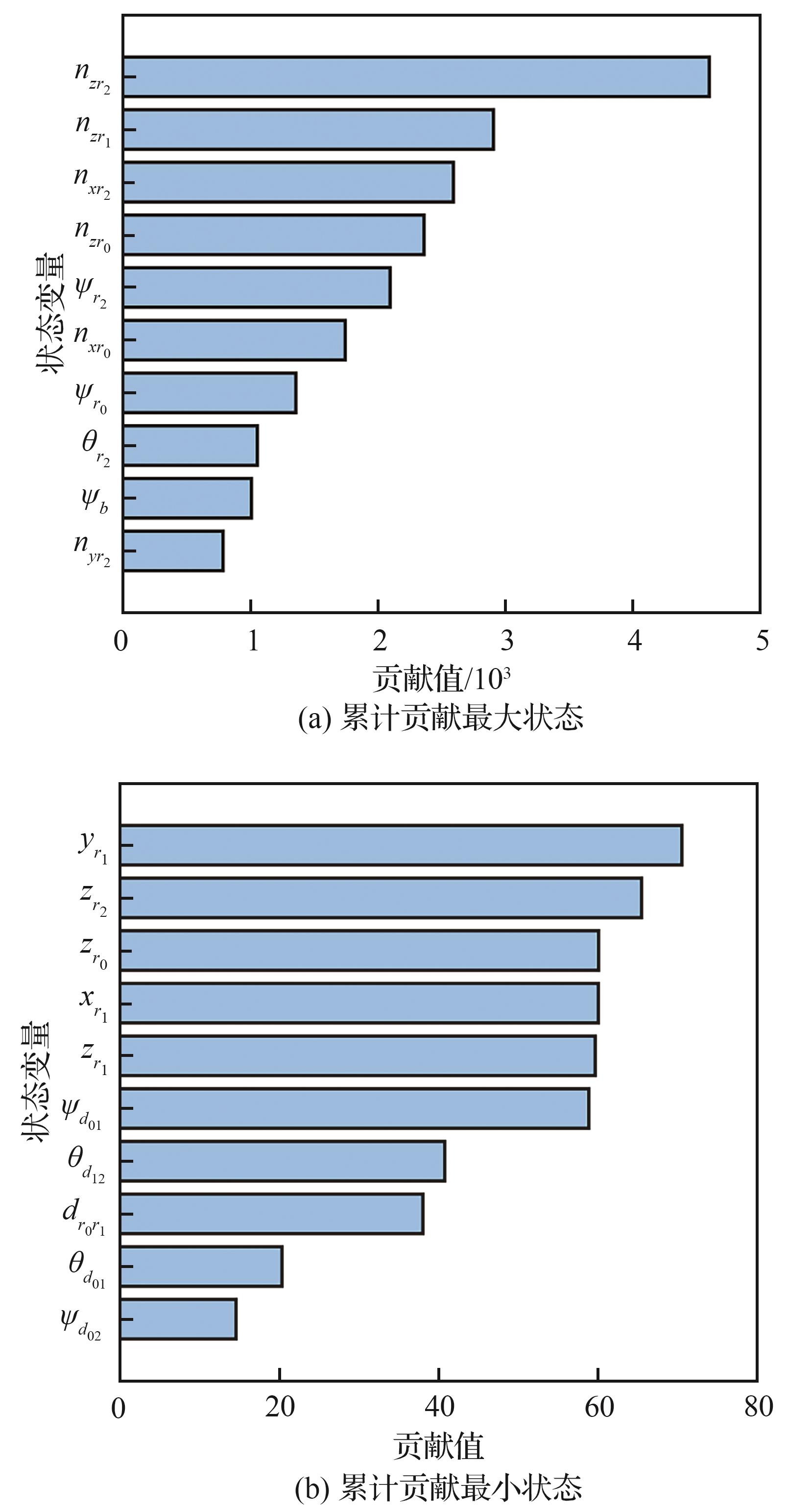
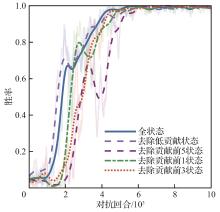
Fig.10
Winning rates before and after state masking
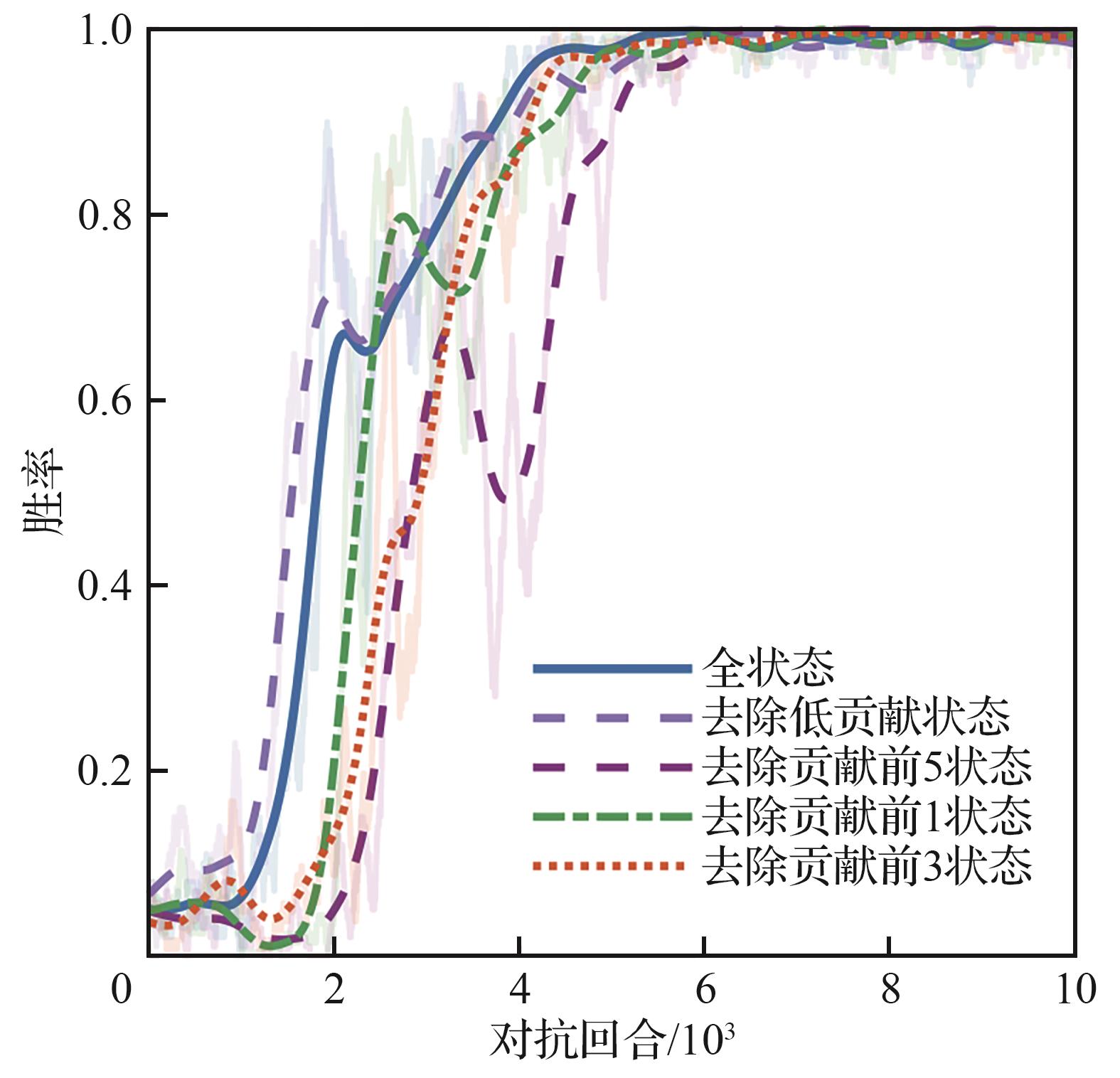

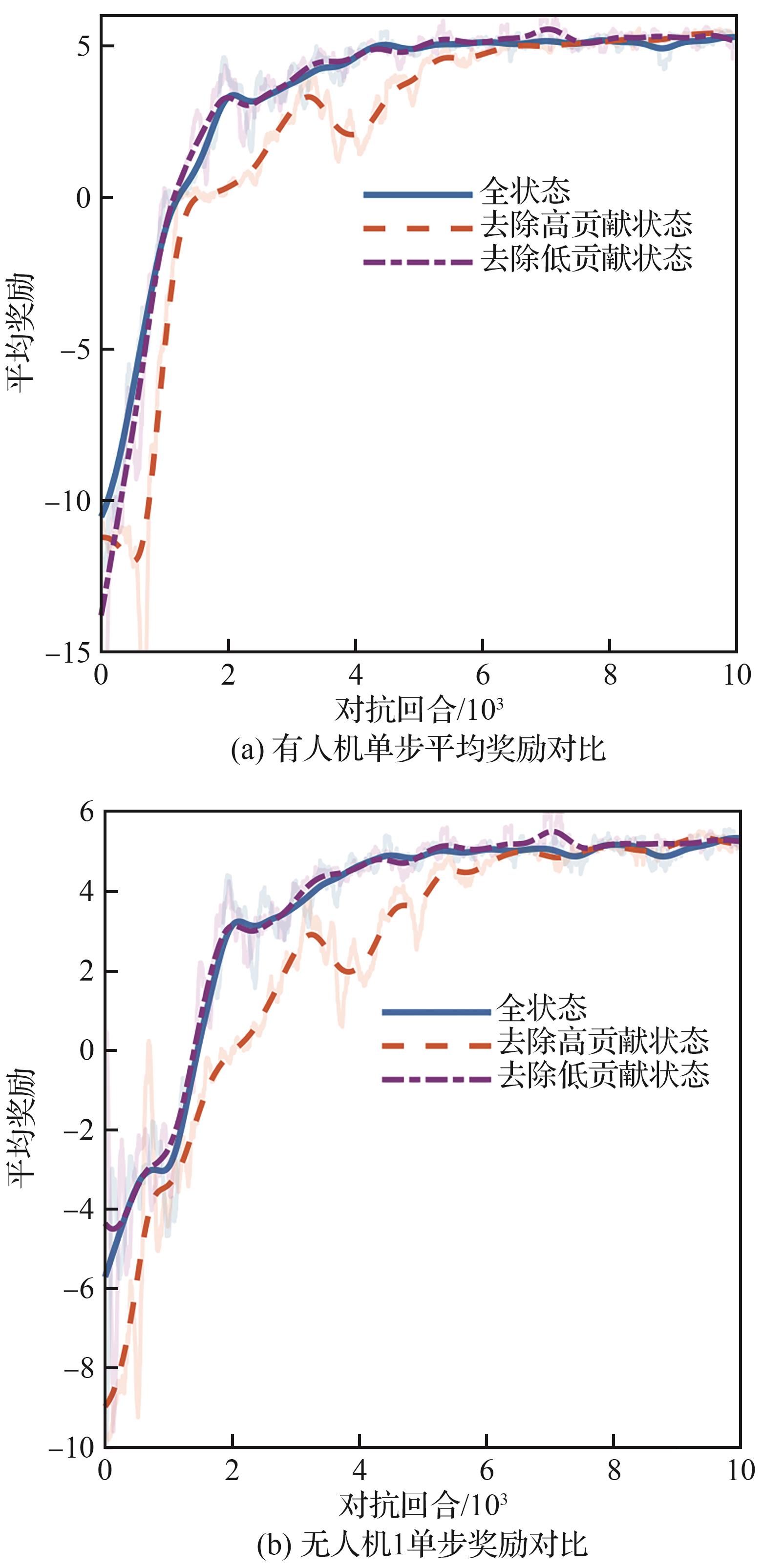
Fig.11
Variation of single-step reward before and after state masking
| [1] |
王童豪, 彭星光, 胡浩, 等. 海上有人/无人协同系统及其关键技术综述[J]. 兵工学报, 2024, 45(10): 3317-3340.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
李佐龙, 朱纪洪, 匡敏驰, 等. 基于混合动作的空战分层强化学习决策算法[J]. 航空学报, 2024, 45(17): 530053.
|
|
|
|
| [13] |
|
| [14] |
李樾, 韩维, 陈清阳, 等. 凸优化算法在有人/无人机协同系统航迹规划中的应用[J]. 宇航学报, 2020, 41(3): 276-286.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
熊威, 张栋, 任智, 等. 面向有人/无人机协同打击的智能决策方法研究[J]. 系统工程与电子技术, 2025, 47(4): 1285-1299.
|
|
|
|
| [18] |
|
| [19] |
杨书恒, 张栋, 熊威, 等. 基于可解释性强化学习的空战机动决策方法[J]. 航空学报, 2024, 45(18): 329922.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [1] | Sihua GAO, Bingyang ZHAO, Jianfu LI. UAV complete data collection trajectory planning algorithm based on time window constraints [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(6): 332451-332451. |
| [2] | Lei ZHANG, Can TIAN, Fangqing WEN, Qinghe ZHANG, Han LIU. Multi-objective evolution with deep deterministic strategy gradient algorithm for mobile edge networks [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(3): 631880-631880. |
| [3] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [4] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [5] | Henghui LI, Qianhui LIN, Taofeng HAN, Yang HE. Close-range air combat model based on energy maneuverability and its applications [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(7): 330863-330863. |
| [6] | Min YANG, Guanjun LIU, Ziyuan ZHOU. Control of lunar landers based on secure reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 630553-630553. |
| [7] | Qichao XIE, Chengyu CAO, Yiyun ZHAO, Fanbiao LI. Integrated guidance and control method based on deep reinforcement learning parameter tuning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 632345-632345. |
| [8] | Chen WANG, Caisheng WEI, Zeyang YIN, Kai JIN, Xingchen LI. Collaborative planning of multi-UAV trajectories and communication strategies considering channel resource constraints [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 331837-331837. |
| [9] | Yu WANG, Zhipeng XIE, Yongjian TIAN, Guanglei MENG. Distributed UAV formation control with virtual structure guided reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331354-331354. |
| [10] | Wei CHEN, Lulu LI, Dong CHEN, Shaohui ZHANG, Yafei LI, Ke WANG, Yuanyuan JIN, Mingliang XU. Multi-aircraft cooperative decision-making methods driven by differentiated support demands for carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531274-531274. |
| [11] | Xudong CHEN, Qiqi CHEN, Yizhe LUO, Jiabao WANG, Mingliang XU. Dynamic parallel scheduling of heterogeneous carrier-based aircraft deck support operations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531329-531329. |
| [12] | Zheng WANG, Hua WANG, Keke CUI, Chaochao LI, Junnan LIU, Mingliang XU. Locally guided reinforcement learning for autonomous dispatching of carrier-based aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531333-531333. |
| [13] | Wenhui LING, Chunhui MU, Lingcong NIE, Xian DU, Ximing SUN. Improved DDPG-based multipoint pressure distribution control of variable geometry scramjet combustor at wide range velocities [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 131092-131092. |
| [14] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [15] | Shuyi GAO, Defu LIN, Duo ZHENG, Cheng XU. Intelligent maneuvering penetration guidance strategies for aerial vehicles considering interceptor detection capability limitations [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 331304-331304. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341