Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (4): 332387.doi: 10.7527/S1000-6893.2025.32387
• Electronics and Electrical Engineering and Control • Previous Articles
Jianxin SU, Yuxin LIAO( ), Weiping XU, Junyue TAN, Xing GAO
), Weiping XU, Junyue TAN, Xing GAO
Received:2025-06-09
Revised:2025-09-19
Accepted:2025-11-08
Online:2025-11-21
Published:2025-11-20
Contact:
Yuxin LIAO
E-mail:liaoyuxin@csu.edu.cn
Supported by:CLC Number:
Jianxin SU, Yuxin LIAO, Weiping XU, Junyue TAN, Xing GAO. Adaptive optimal control for hypersonic morphing vehicles considering performance constraints[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(4): 332387.

Fig.1
Control framework


Fig.2
Neural network construction


Fig.3
Folding angle

Table 1
Parameters of control method
| 控制方法模块 | 参数 | 数值 |
|---|---|---|
| 稳态控制器 | 0.002 | |
| 0.95 | ||
| P0 | 5 | |
| Pf | 0.1 | |
| K1 | [10,10,10] | |
| K2 | diag(15,15,15) | |
最优补偿控制器 (离线策略迭代) | Q1 | diag(1,1,1) |
| P | diag(0.5,0.5,0.5) | |
最优补偿控制器 (在线策略迭代) | 0.8 | |
| 0.5 | ||
| 0.5 | ||
| 0.5 | ||
| Q | diag(1,1,1) | |
| R1 | diag(0.5,0.5,0.5) | |
| R2 | diag(0.5,0.5,0.5) | |
| 微分器 | H | 50 |
| 2 | ||
| 2 | ||
| 干扰观测器 | diag(3,3,3) | |
| diag(5,5,5) | ||
| diag(3,3,3) | ||
| diag(5,5,5) |

Fig.4
Variations of neural network weights in offline iteration


Fig.5
Tracking curves of aerodynamic angles in nominal case
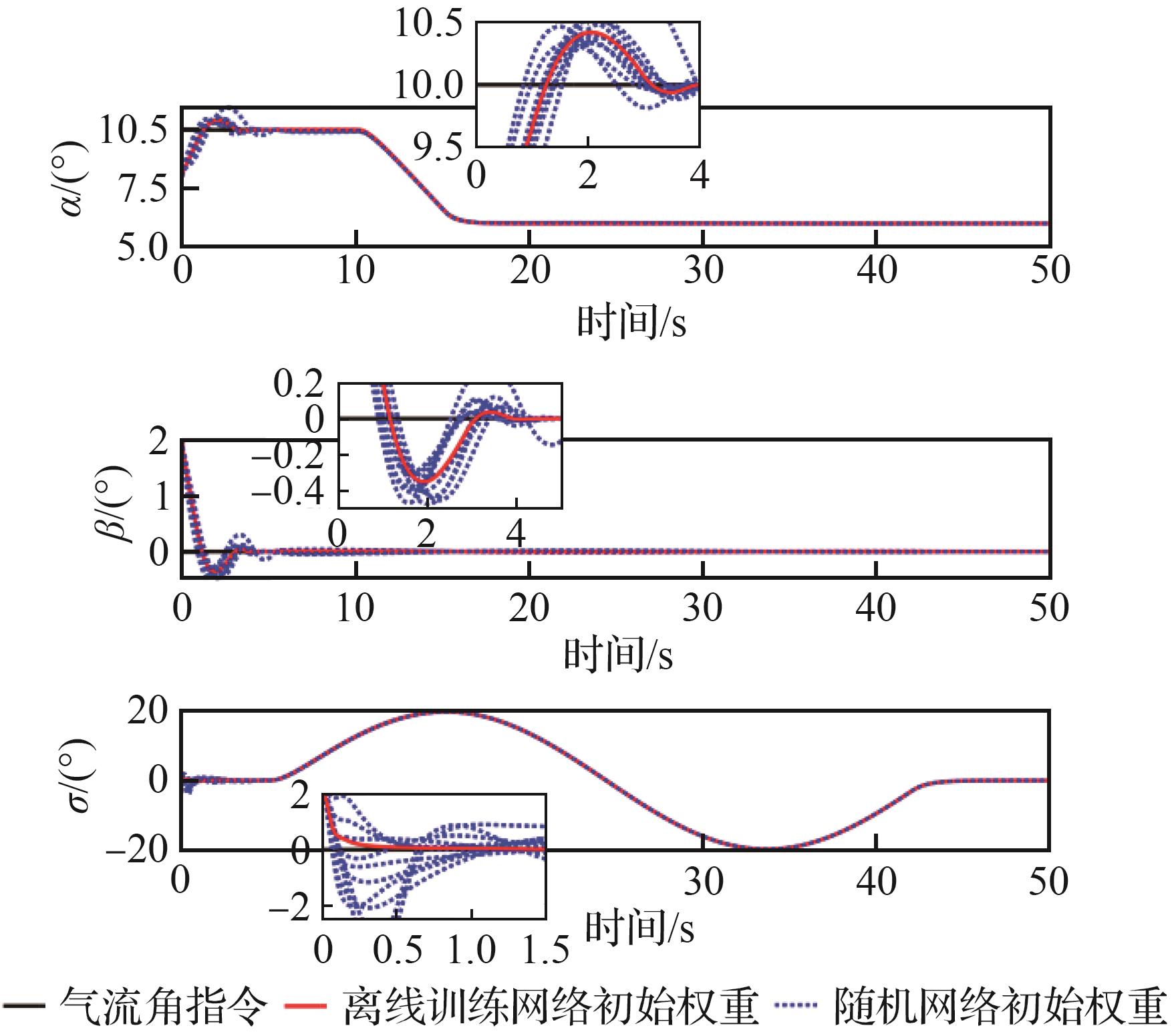

Fig.6
Curves of equivalent rudder deflection angle in nominal case

Table 2
Model parameter uncertainty
| 工况 | 模型不确定性 | |||
|---|---|---|---|---|
| 1 | +30 | +30 | +30 | +30 |
| 2 | -30 | |||
| 3 | -30 | +30 | ||
| 4 | -30 | |||
| 5 | -30 | +30 | +30 | |
| 6 | -30 | |||
| 7 | -30 | +30 | ||
| 8 | -30 | |||
| 9 | -30 | +30 | +30 | +30 |
| 10 | -30 | |||
| 11 | -30 | +30 | ||
| 12 | -30 | |||
| 13 | -30 | +30 | +30 | |
| 14 | -30 | |||
| 15 | -30 | +30 | ||
| 16 | -30 | |||
Table 3
Attitude tracking control performance
| 性能指标 | 本文方法(均值) | 对比方法(均值) |
|---|---|---|
| 俯仰通道IAE/ | 2.126 6 | 2.234 4 |
| 偏航通道IAE/ | 1.853 | 2.255 2 |
| 滚转通道IAE/ | 0.741 48 | 2.160 7 |
| 俯仰通道ITAE/ | 4.786 9 | 4.622 8 |
| 偏航通道ITAE/ | 3.429 6 | 5.625 |
| 滚转通道ITAE/ | 7.249 9 | 13.010 9 |

Fig.7
Tracking curves of aerodynamic angles in Case 16


Fig.8
Tracking error of aerodynamic angles in Case 16


Fig.9
Curves of equivalent rudder deflection angle in Case 16


Fig.10
ActorU network output in Case 16


Fig.11
Increments of neural network weight in online update

| [1] | 王帅, 晁涛, 韩宇辰, 等. 变体飞行器变形策略与控制方法研究进展[J]. 战术导弹技术, 2024(4): 1-15. |
| WANG S, CHAO T, HAN Y C, et al. Research progress on morphing strategies and control methods for morphing aircraft[J]. Tactical Missile Technology, 2024(4): 1-15 (in Chinese). | |
| [2] | 王鹏, 陈浩岚, 鲍存余, 等. 变形飞行器建模及控制方法研究综述[J]. 宇航学报, 2022, 43(7): 853-865. |
| WANG P, CHEN H L, BAO C Y, et al. Review on modeling and control methods of morphing vehicle[J]. Journal of Astronautics, 2022, 43(7): 853-865 (in Chinese). | |
| [3] | REN J R, HANG B, SANG M H, et al. Nonlinearity compensation based robust tracking control of nonlinear nonminimum phase hypersonic flight vehicles[J]. ISA Transactions, 2022, 131: 236-245. |
| [4] | GUO Z Y, HENRY D, GU X Y, et al. Performance-guaranteed attitude tracking control for RLV: A finite-time PPC approach[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(4): 5024-5034. |
| [5] | HUANG J, WANG T Y, WANG G, et al. Adaptive fault-tolerant control for a class of flexible air-breathing hypersonic vehicles[J]. Asian Journal of Control, 2023, 25(5): 3792-3804. |
| [6] | 王忠森, 廖宇新, 魏才盛, 等. 高超声速飞行器快速终端滑模保性能容错控制[J]. 航空学报, 2023, 44(24): 328476. |
| WANG Z S, LIAO Y X, WEI C S, et al. Fast terminal sliding mode fault-tolerant control of hypersonic vehicle with guaranteed performance[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476 (in Chinese). | |
| [7] | SHAO J C, CHE W W, SHAO K. Nonlinear prescribed performance sliding mode control of hypersonic vehicles[J]. International Journal of Robust and Nonlinear Control, 2024, 34(14): 9928-9948. |
| [8] | YIN Z Y, WANG B, XIONG R T, et al. Attitude tracking control of hypersonic vehicle based on an improved prescribed performance dynamic surface control[J]. The Aeronautical Journal, 2024, 128(1323): 875-895. |
| [9] | BU X W, LV M L, LEI H M, et al. Fuzzy neural pseudo control with prescribed performance for waverider vehicles: A fragility-avoidance approach[J]. IEEE Transactions on Cybernetics, 2023, 53(8): 4986-4999. |
| [10] | 张化光, 张欣, 罗艳红, 等. 自适应动态规划综述[J]. 自动化学报, 2013, 39(4): 303-311. |
| ZHANG H G, ZHANG X, LUO Y H, et al. An overview of research on adaptive dynamic programming[J]. Acta Automatica Sinica, 2013, 39(4): 303-311 (in Chinese). | |
| [11] | BAO C Y, WANG P, TANG G J. Data-driven based model-free adaptive optimal control method for hypersonic morphing vehicle[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3713-3725. |
| [12] | BAO C Y, WANG P, HE R Z, et al. Observer-based optimal control method combination with event-triggered strategy for hypersonic morphing vehicle[J]. Aerospace Science and Technology, 2023, 136: 108219. |
| [13] | HUANG X, LIU J R, JIA C H, et al. Online self-learning attitude tracking control of morphing unmanned aerial vehicle based on dual heuristic dynamic programming[J]. Aerospace Science and Technology, 2023, 143: 108727. |
| [14] | WANG Z, WU T Y, ZHU Z X, et al. Reinforcement learning-based adaptive attitude control method for a class of hypersonic flight vehicles subject to nonaffine structure and unmatched disturbances[J]. Journal of Aerospace Engineering, 2024, 37(2): 04024003. |
| [15] | YE H, MENG Y Z, WEN L Y, et al. State constrained fault-tolerant control of hypersonic vehicle with unknown centroid shift based on zero-sum game[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(1): 831-843. |
| [16] | HU G J, GUO J G, GUO Z Y, et al. ADP-based intelligent tracking algorithm for reentry vehicles subjected to model and state uncertainties[J]. IEEE Transactions on Industrial Informatics, 2023, 19(4): 6047-6055. |
| [17] | HU G J, GUO J G, CIESLAK J, et al. Fault-tolerant control based on adaptive dynamic programming for reentry vehicles subjected to state-dependent actuator fault[J]. Engineering Applications of Artificial Intelligence, 2023, 123: 106450. |
| [18] | XU S H, WEI C Z, CAI L G, et al. Neural network-based adaptive optimal tracking control for hypersonic morphing aircraft with appointed-time prescribed performance[J]. Journal of the Franklin Institute, 2024, 361(12): 107026. |
| [19] | AN K, WANG Z G, HUANG W. Adaptive learning-based optimal tracking control system design and analysis of a disturbed nonlinear hypersonic vehicle model[J]. Science China Technological Sciences, 2024, 67(6): 1893-1906. |
| [20] | AN K, WANG Z G, HUANG W, et al. Performance-prescribed optimal neural control for hypersonic vehicles considering disturbances: An adaptive dynamic programming approach[J]. Aerospace Science and Technology, 2024, 152: 109370. |
| [21] | 曹承钰, 李繁飙, 廖宇新, 等. 高超声速变外形飞行器建模与固定时间预设性能控制[J]. 自动化学报, 2024, 50(3): 486-504. |
| CAO C Y, LI F B, LIAO Y X, et al. Modeling and fixed-time prescribed performance control for hypersonic morphing vehicle[J]. Acta Automatica Sinica, 2024, 50(3): 486-504 (in Chinese). | |
| [22] | FAN W R, TIAN B L. Adaptive multivariable super-twisting sliding mode controller and disturbance observer design for hypersonic vehicle[J]. Mathematical Problems in Engineering, 2016, 2016: 5291912. |
| [23] | BU X W, WU X Y, HUANG J Q, et al. A guaranteed transient performance-based adaptive neural control scheme with low-complexity computation for flexible air-breathing hypersonic vehicles[J]. Nonlinear Dynamics, 2016, 84(4): 2175-2194. |
| [24] | QIN C B, WANG J G, ZHU H Y, et al. Safe adaptive learning algorithm with neural network implementation for H∞ control of nonlinear safety-critical system[J]. International Journal of Robust and Nonlinear Control, 2023, 33(1): 372-391. |
| [1] | Jiong HE, Binwu REN, Siliang DU, Yousong XU, Bo WANG. Adaptive attitude control for tilt-quadrotor UAV based on ADRC-RBF [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732189-732189. |
| [2] | Tao ZHANG, Pan LI, Zixu WANG, Zhenhua ZHU. Design of reward functions for helicopter attitude control in reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732184-732184. |
| [3] | Fang ZHANG, Weibin XIANG, Kai XIAO, Siqi XIAO, Liang XIANG, Bing WANG. Simulation and experiment of attitude control propulsion system’s dynamic characteristics [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732329-732329. |
| [4] | Ronghai KOU, Wenbo LI, Qingqing DANG, Jinjin XIE. Fault diagnosis of spacecraft attitude control system driven by data and model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732259-732259. |
| [5] | Honglin LIU, Guan WANG, Shuaibin AN, Shaojie MA, Kai LIU. Online identification based strong adaptive control of hypersonic morphing vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331654-331654. |
| [6] | Zibo LIU, Ran ZHANG, Wenchao XUE, Huifeng LI. Active disturbance rejection control for load relief of launch vehicles considering elastic effects [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330319-330319. |
| [7] | Xi WANG, Changqing CHEN, Xiaoping XU, Zhen HUANG. Attitude control schemes of yaw steering with front and back pointing to the sun alternately [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330673-330673. |
| [8] | Yuqing QIU, Yan LI, Jinxi LANG, Yuxian LIU, Zhong WANG. Robust adaptive attitude control of high-speed helicopters in transition mode [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529927-529927. |
| [9] | Yanxiang HOU, Lihao FENG. Wind tunnel virtual flight test of flying wing configuration with active flow control [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(24): 630636-630636. |
| [10] | Xueqin CHEN, Boyu YANG, Fan WU, Chengfei YUE, Xibin CAO. State and bias estimation of spacecraft attitude control system based on l1-TSXKF [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329678-329678. |
| [11] | Feng ZHANG, Yi SUN, Shuai SHANG, Baoe YANG. High pressure combustion experiment for hypergolic propellant unlike doublet injectors [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(11): 529507-529507. |
| [12] | Guangquan DUAN, Guoping LIU. Adaptive prescribed control of position and attitude of combined spacecraft based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628837-628837. |
| [13] | Bing XIAO, Haichao ZHANG. Reinforcement learning robust optimal control for spacecraft attitude stabilization [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628890-628890. |
| [14] | Chao DUAN, Xiaodong SHAO, Qinglei HU, Huaining WU. Attitude tracking of underactuated spacecraft based on transverse function [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628910-628910. |
| [15] | Chenyang LIU, Dawei WU, Yize GUO, Xinsai LV, Jiani ZHOU, Shuyi SHAO. Robust adaptive attitude control of quadrotor with uncertain strong coupling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645-727645. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341