Acta Aeronautica et Astronautica Sinica
Previous Articles Next Articles
Ming LIU, Jiao WU( )
)
Received:2025-05-28
Revised:2025-06-27
Accepted:2025-09-03
Online:2025-09-05
Published:2025-09-05
Contact:
Jiao WU
E-mail:wn941030@163.com
Supported by:CLC Number:
Ming LIU, Jiao WU. Neural network-assisted cooperative navigation of spacecraft clusters under GNSS denials[J]. Acta Aeronautica et Astronautica Sinica, doi: 10.7527/S1000-6893.2025.32339.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
URL: https://hkxb.buaa.edu.cn/EN/10.7527/S1000-6893.2025.32339

Fig.1
Factor graph based distributed cooperative navigation system framework
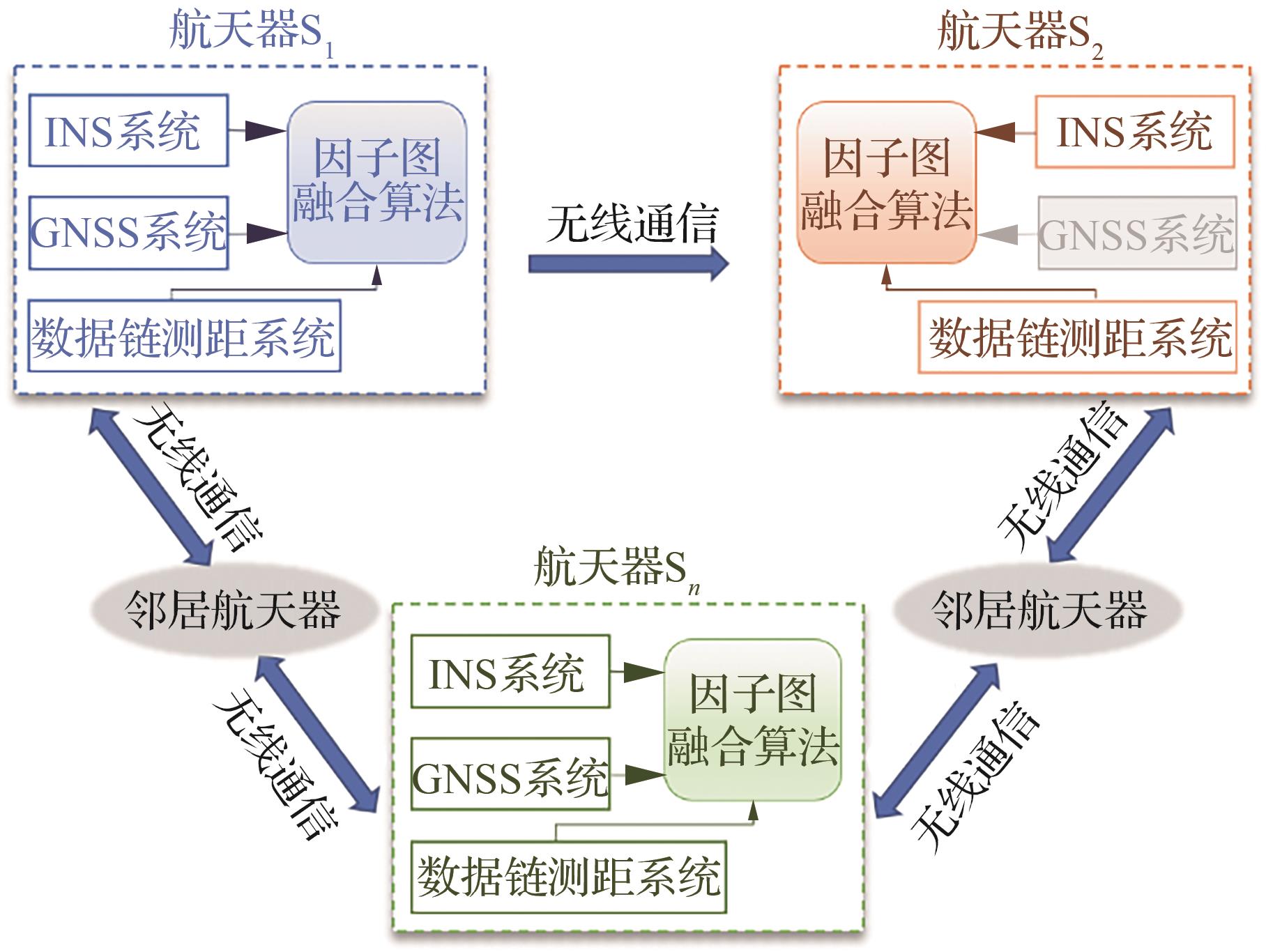
Fig.2
Schematic of cooperative navigation principle based on data link relative distance measurement
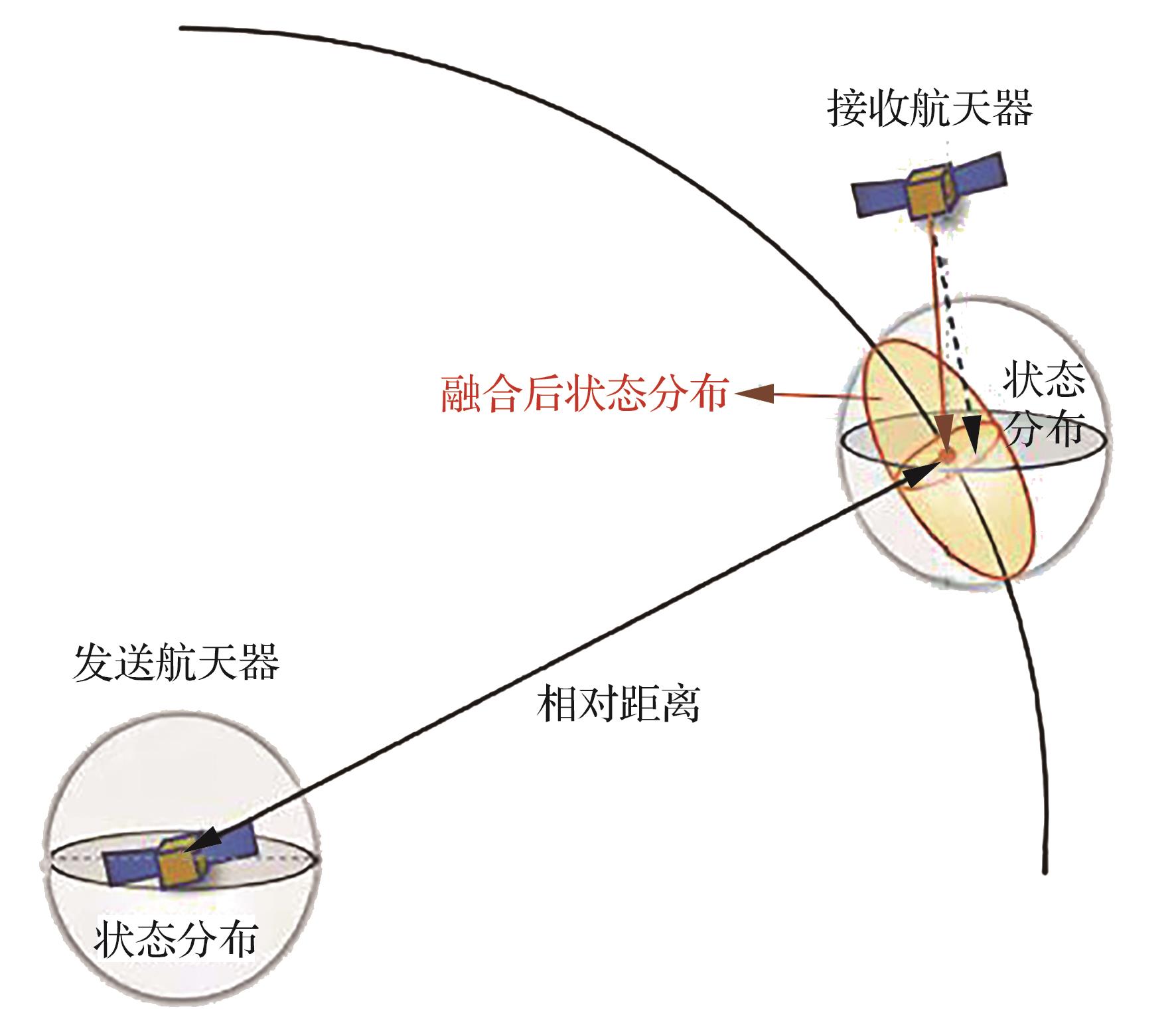
Fig.3
Factor graph of INS/GNSS/DL cooperative navigation for spacecraft swarm
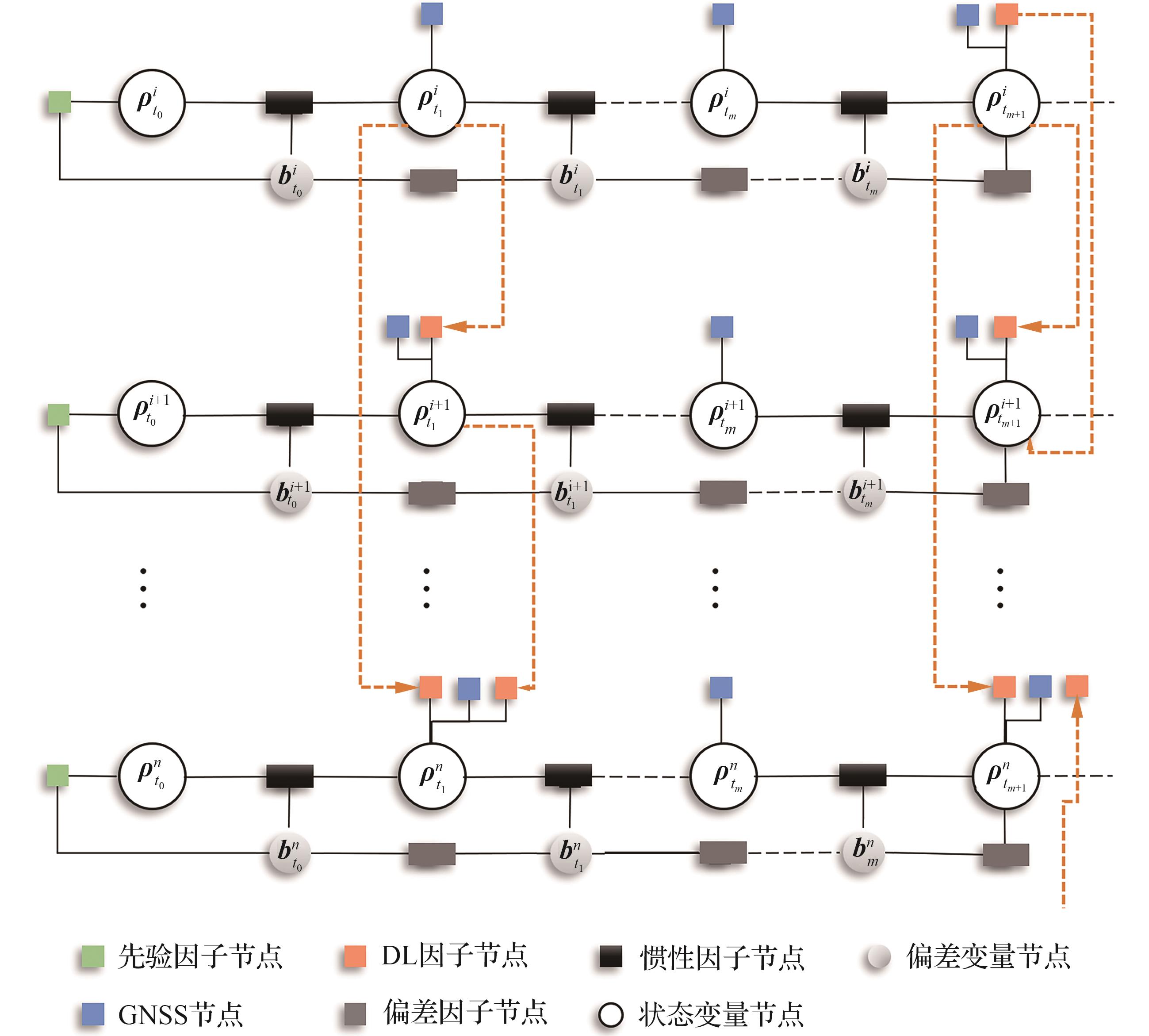
Fig.4
Message passing process of INS/GNSS/DL cooperative navigation
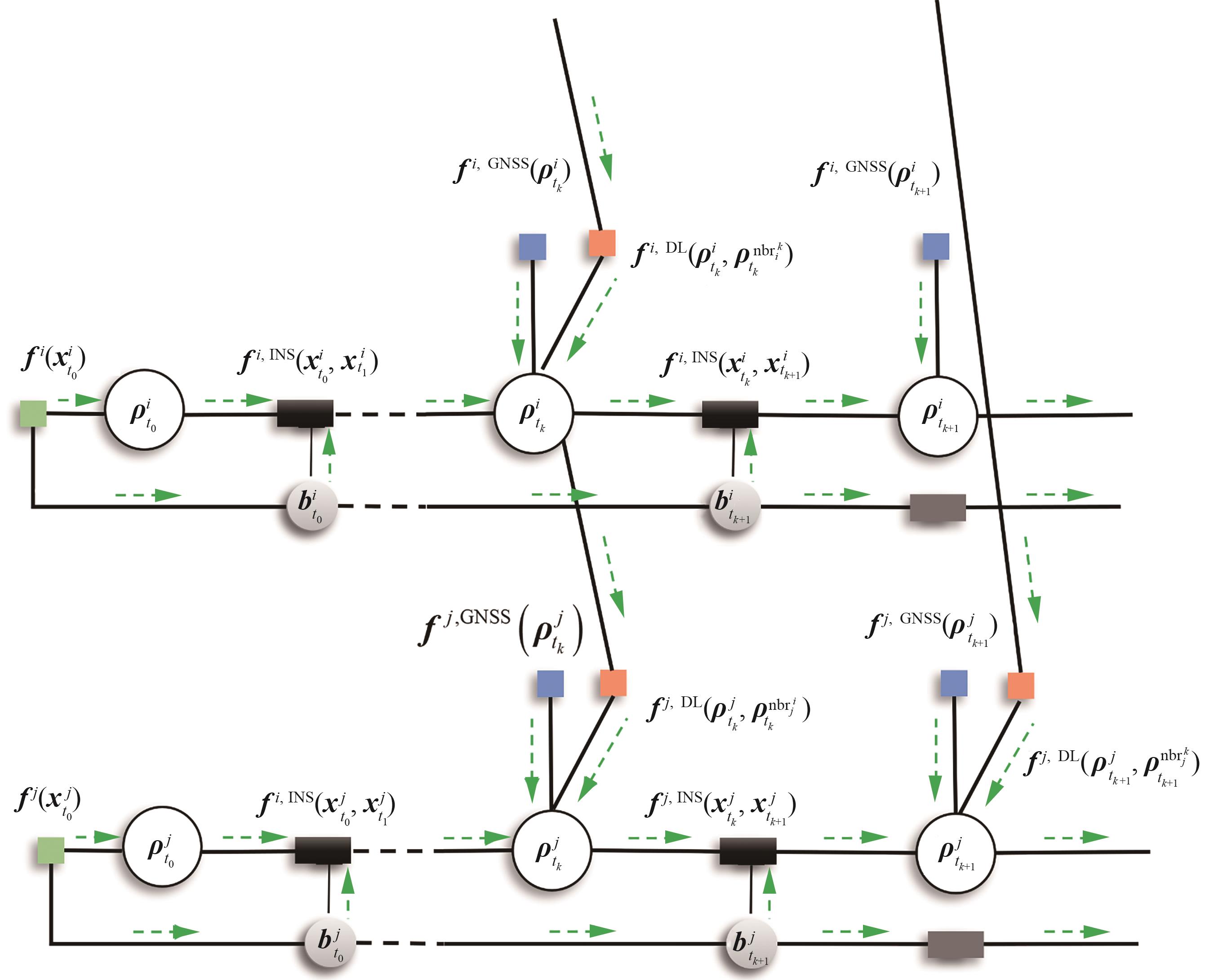

Fig. 5
Network structure of GRNN
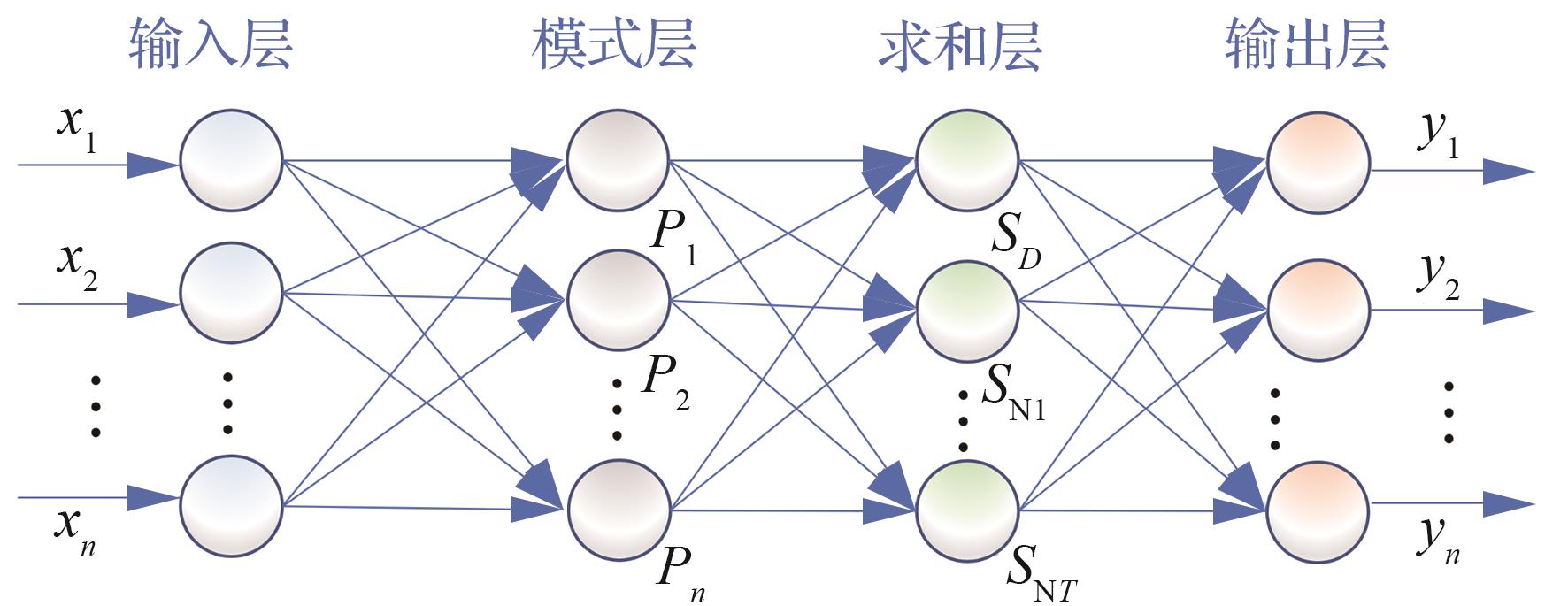
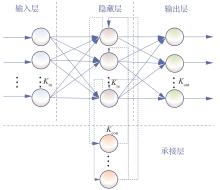
Fig.6
Network structure of ENN
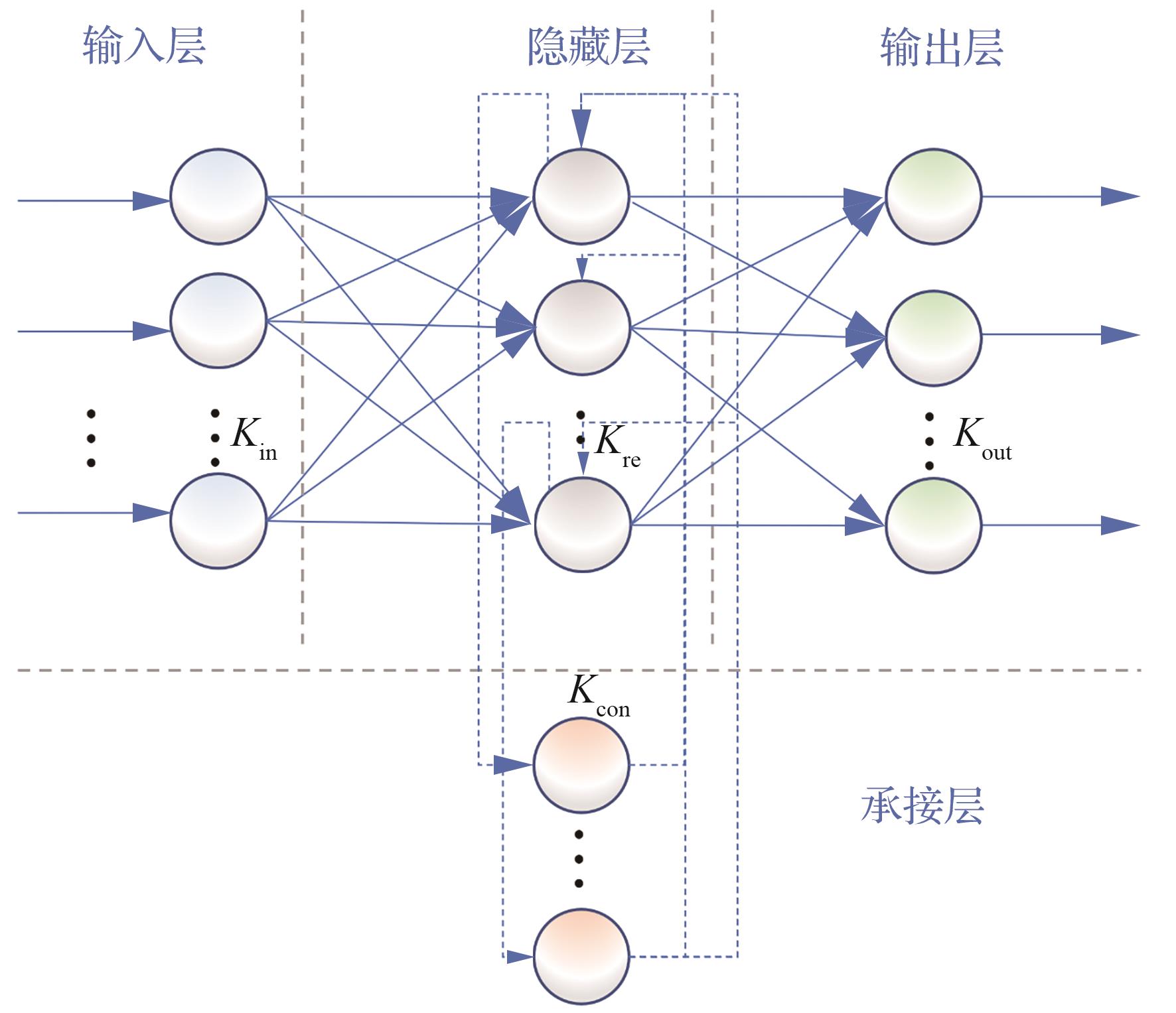
Table 1
Mean value of initial orbital elements for spacecraft
| 参数 | ||||||
|---|---|---|---|---|---|---|
| 数值 | 6 878.14 | 0.01 | 30 | 120 | 45 | 90 |
Table 2
Variance of initial orbital element distribution of spacecraft
| 参数 | ||||||
|---|---|---|---|---|---|---|
| 方差 | 2 | 1×10-4 | 4×10-8 | 4×10-8 | 4×10-8 | 4×10-8 |
Table 3
Parameters of GNSS
| 工况 | 正常 | 低精度 | 故障 | 拒止 |
|---|---|---|---|---|
| 频率/Hz | 1 | 1 | ||
| 噪声标准差/m | [2,2,8] | [8,8,32] | 500 |
Table 4
Parameters of IMU and DL
| 传感器 | 频率/Hz | 白噪声标准差 | 随机游走 |
|---|---|---|---|
| 加速度计 | 100 | ||
| 陀螺仪 | 100 | 0.05 (°)/h | |
| 数据链 | 10 | 1 m |
Table 5
RMSE of positioning results for 100 spacecraft under working condition 1
| 算法 | 位置误差RMSE (10~500 s)/m |
|---|---|
| INS/GNSS | 1.198 3 |
| INS/GNSS/DL(DL测距精度1 m) | 0.681 5 |
| INS/GNSS/DL(DL测距精度3 m) | 0.704 5 |
| INS/GNSS/DL(DL测距精度5 m) | 0.836 3 |
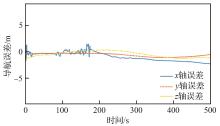
Fig.7
Navigation position error of FG-INS/GNSS under normal condition
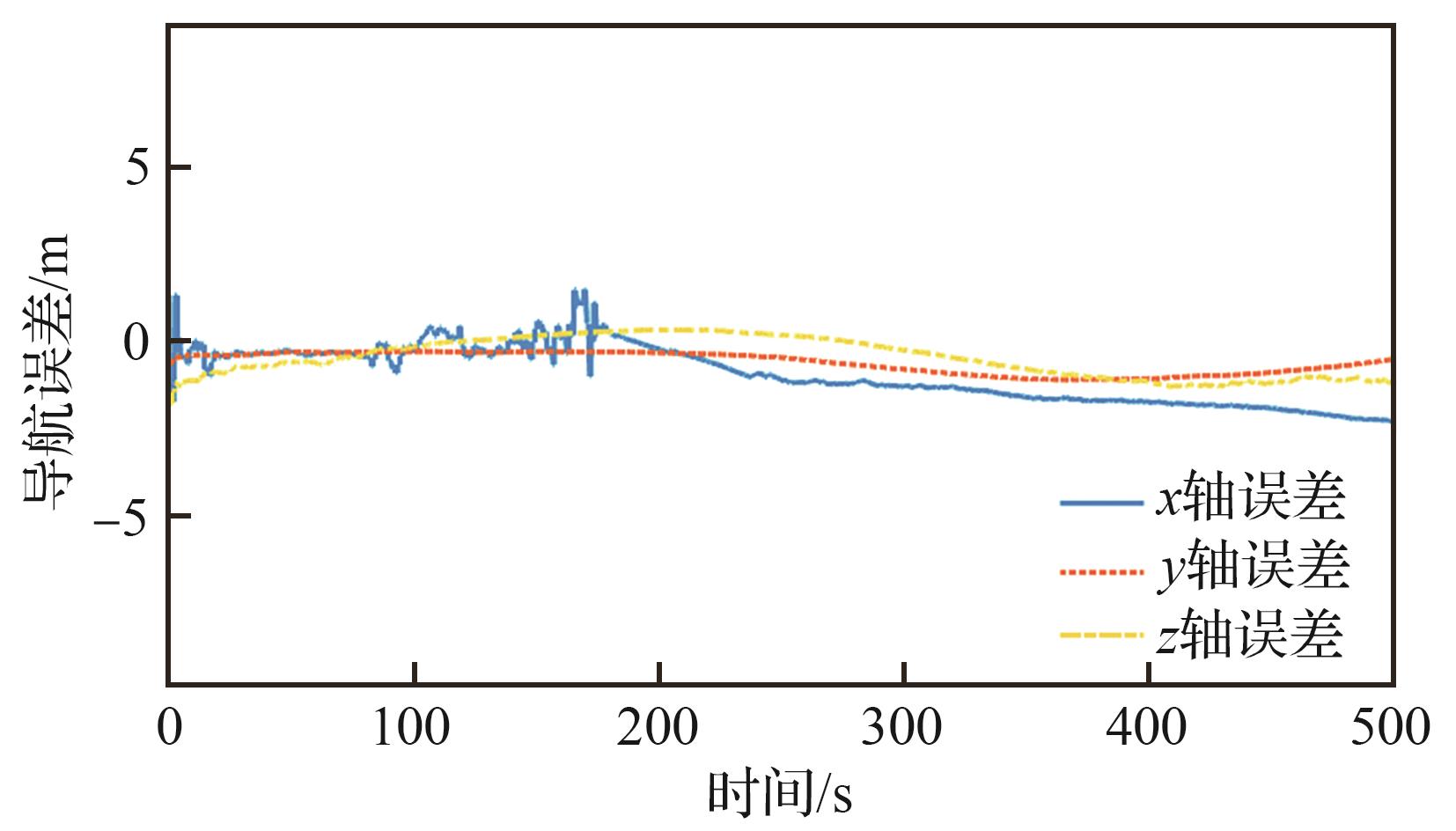
Fig. 8
Navigation position error of FG-INS/GNSS/DL under normal condition
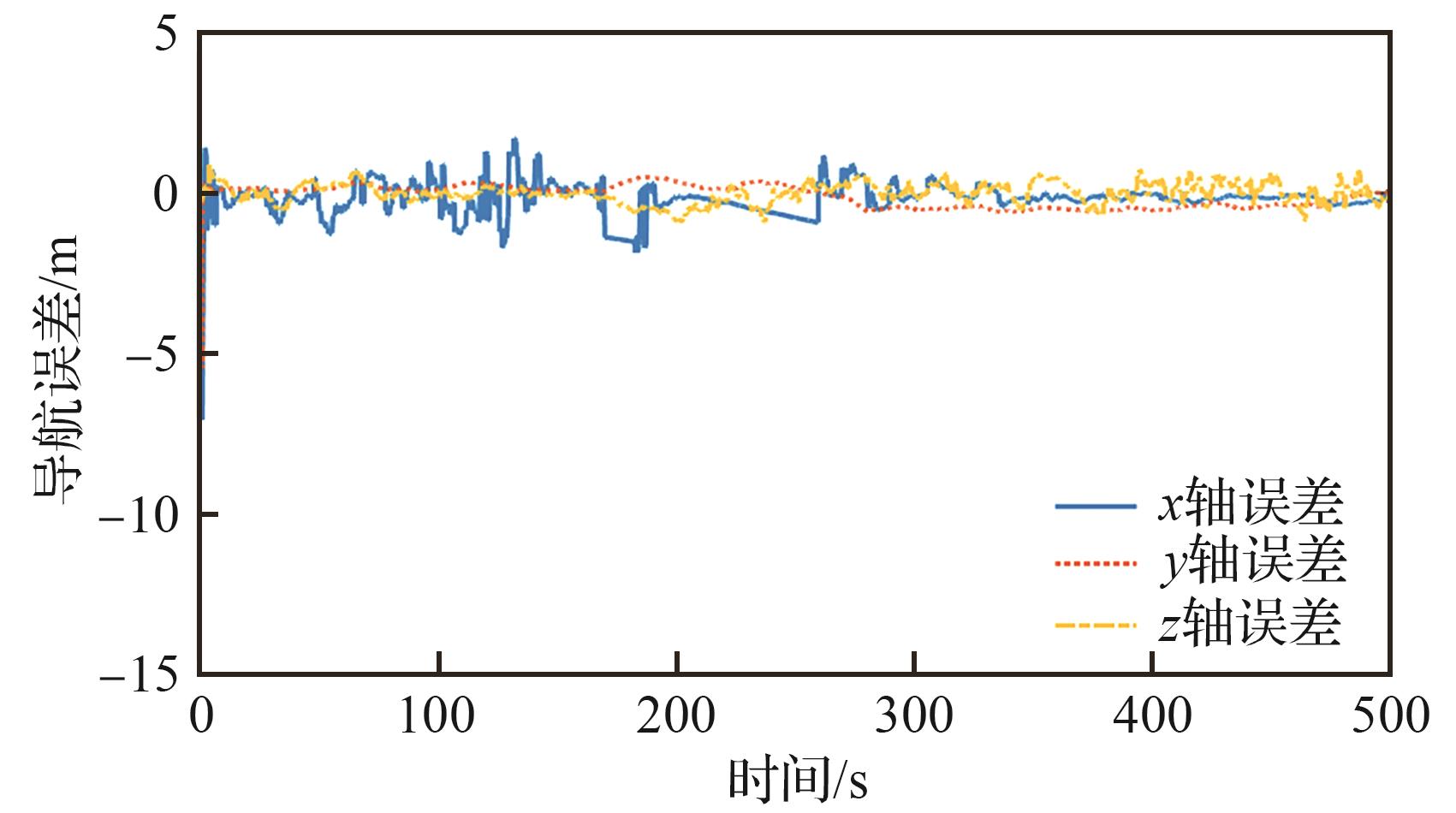
Table 6
RMSE of positioning results for 100 spacecraft low-precision GNSS
| 算法 | 位置误差RMSE (10~500 s)/m |
|---|---|
| INS/GNSS | 2.819 3 |
| INS/GNSS/DL(DL测距精度1 m) | 2.026 2 |
| INS/GNSS/DL(DL测距精度3 m) | 2.148 3 |
| INS/GNSS/DL(DL测距精度5 m) | 2.298 8 |
Fig.9
Navigation position error of FG-INS/GNSS under low-precision GNSS
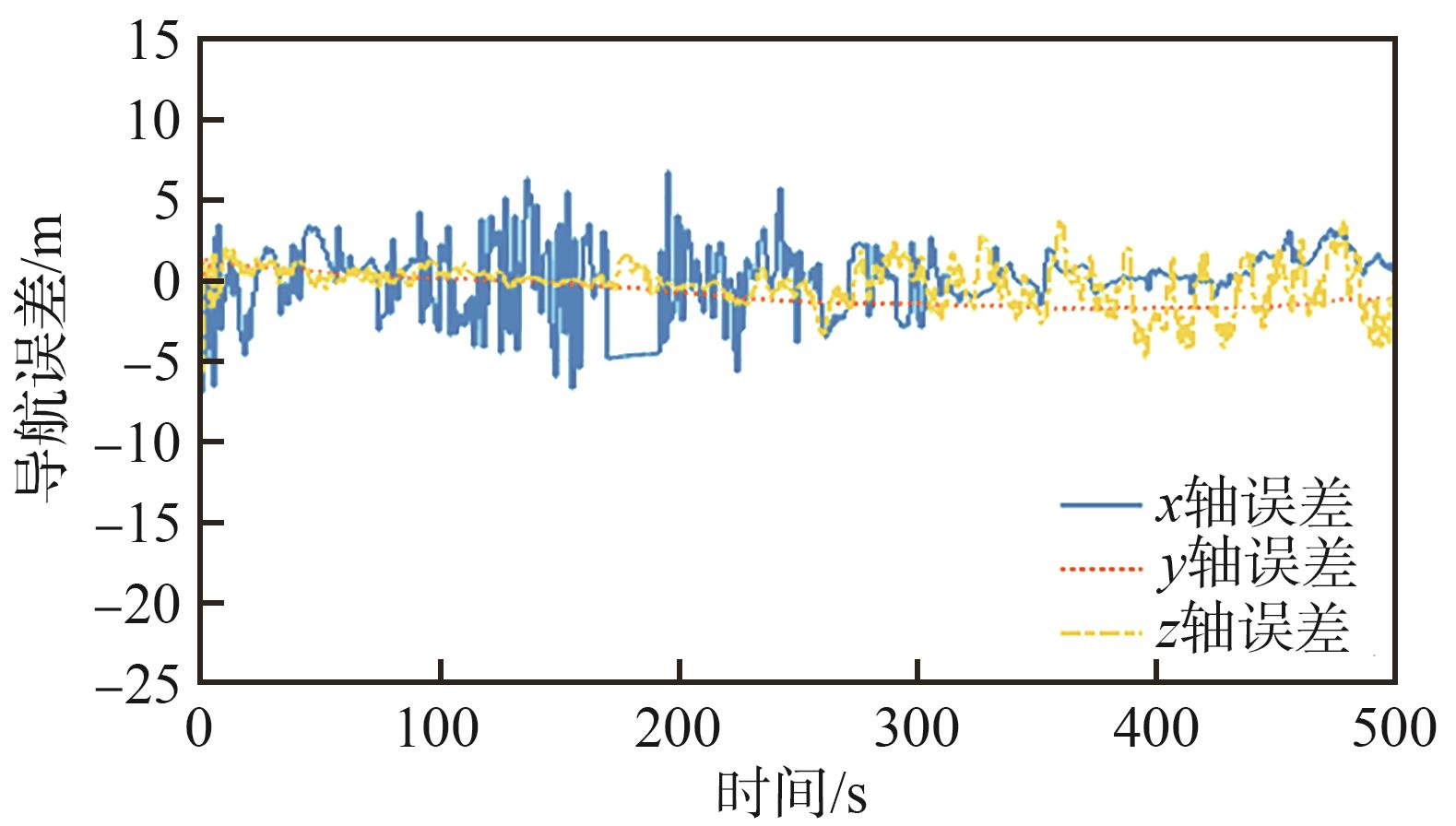
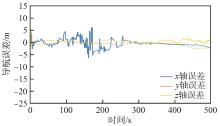
Fig.10
Navigation position error of FG-INS/GNSS/DL under low-precision GNSS
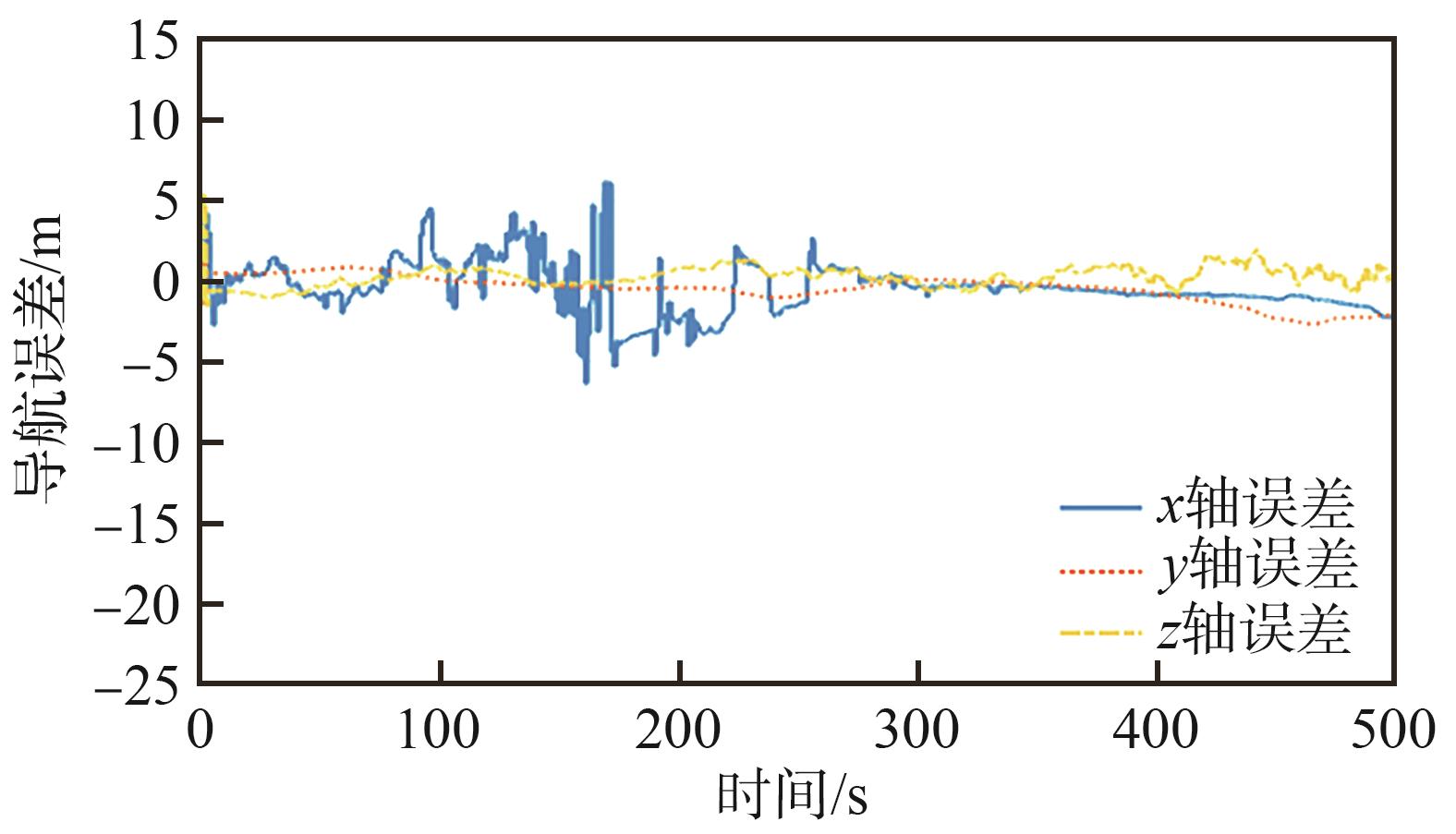
Fig.11
Position error of INS/GNSS under GNSS fault
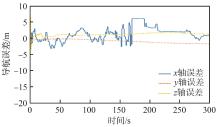
Fig.12
Position error of INS/GNSS with GNSS fault isolation
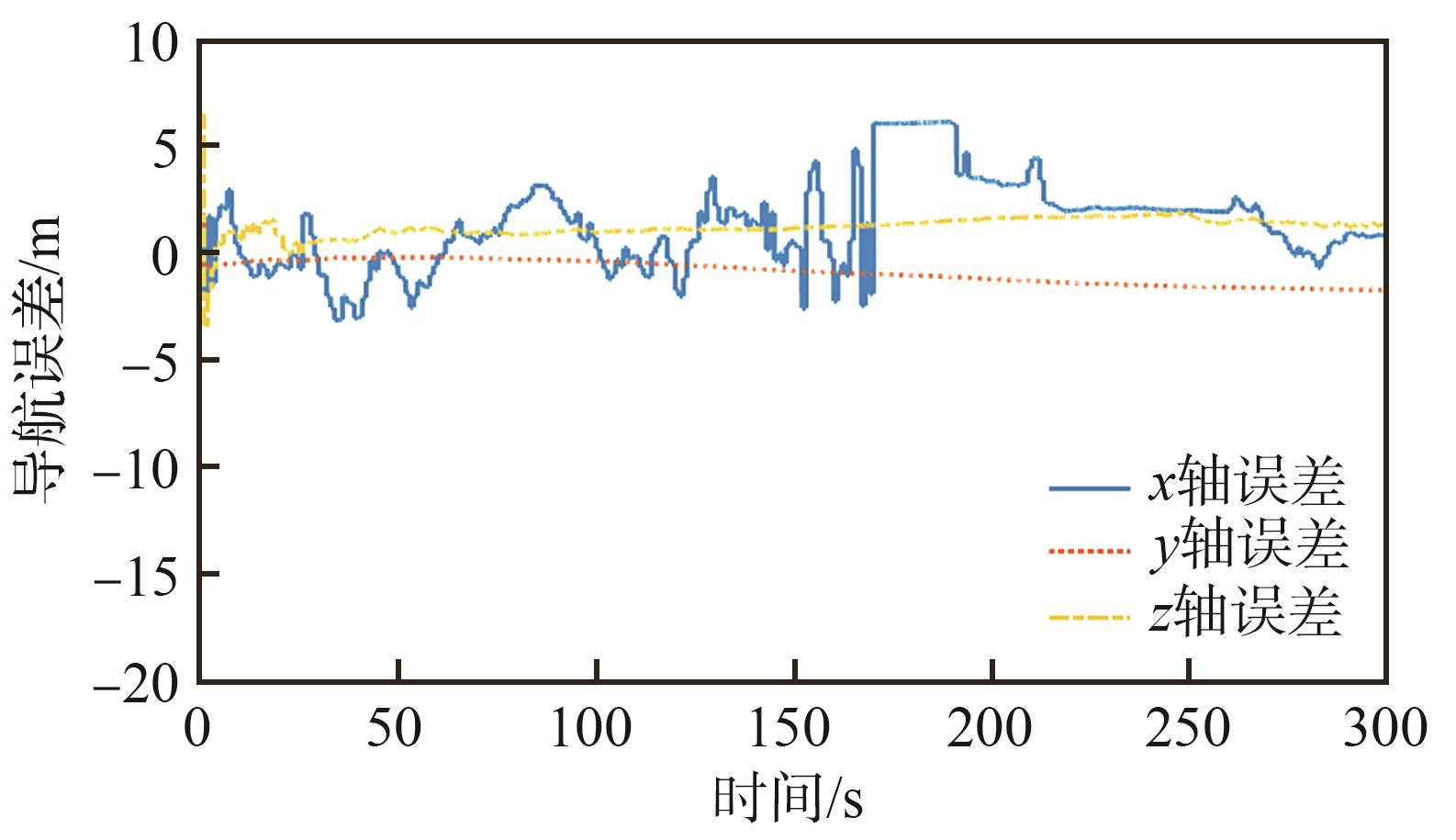
Fig.13
Position error of INS/GNSS/DL under GNSS fault and DL fault
Fig. 14
Position error of INS/GNSS/DL with GNSS and DL fault isolation
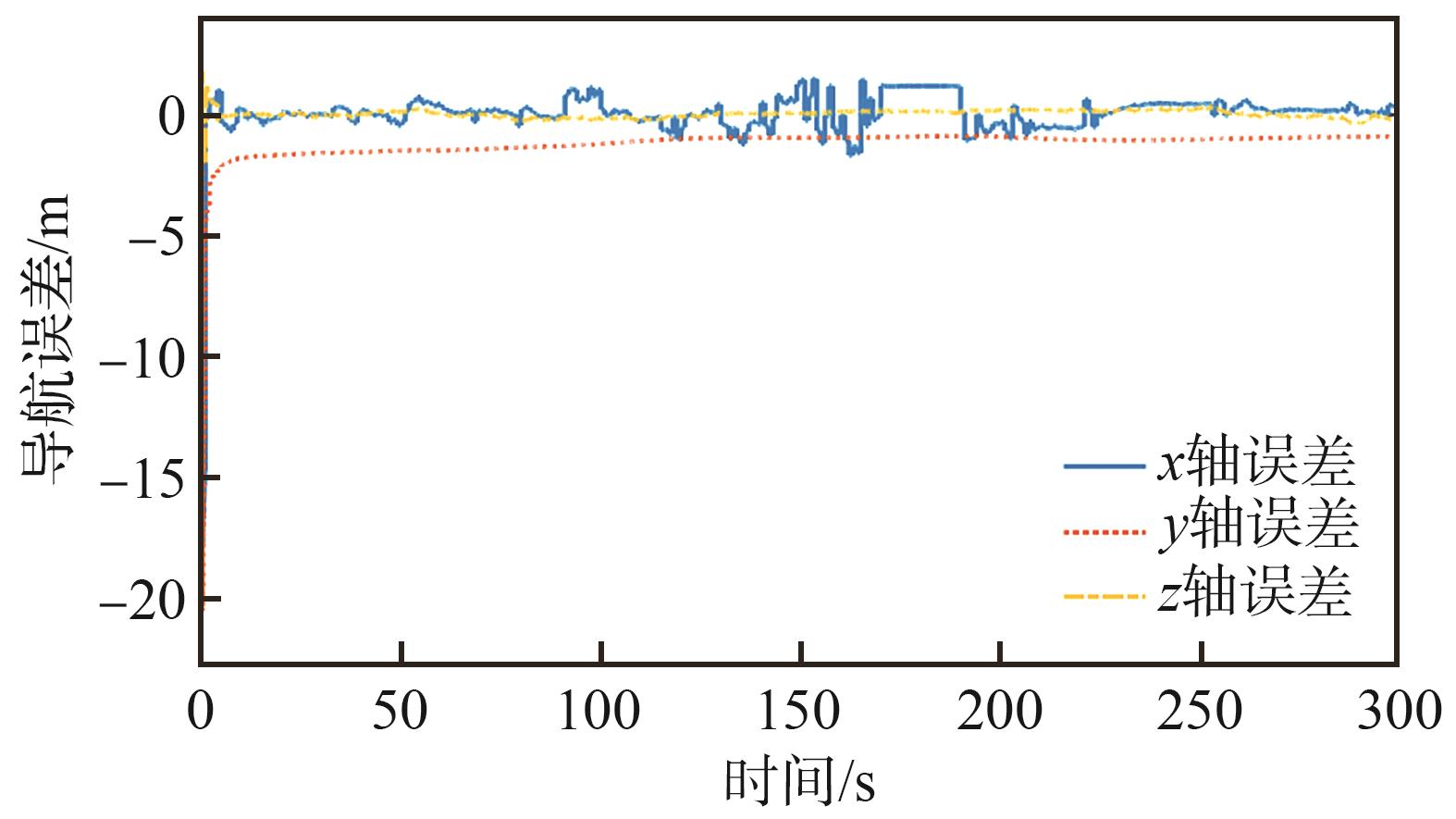
Table 7
Positioning results for 100 spacecraft under fault condition
| 算法 | 位置误差RMSE(30~120 s)/m |
|---|---|
| INS/GNSS 故障未隔离 | 67.915 0 |
| INS/GNSS 故障隔离 | 1.937 3 |
| INS/GNSS/DL 故障未隔离 | 23.212 5 |
| INS/GNSS/DL 故障隔离 | 0.991 7 |
Fig.15
Navigation position error of INS during GNSS-denied period
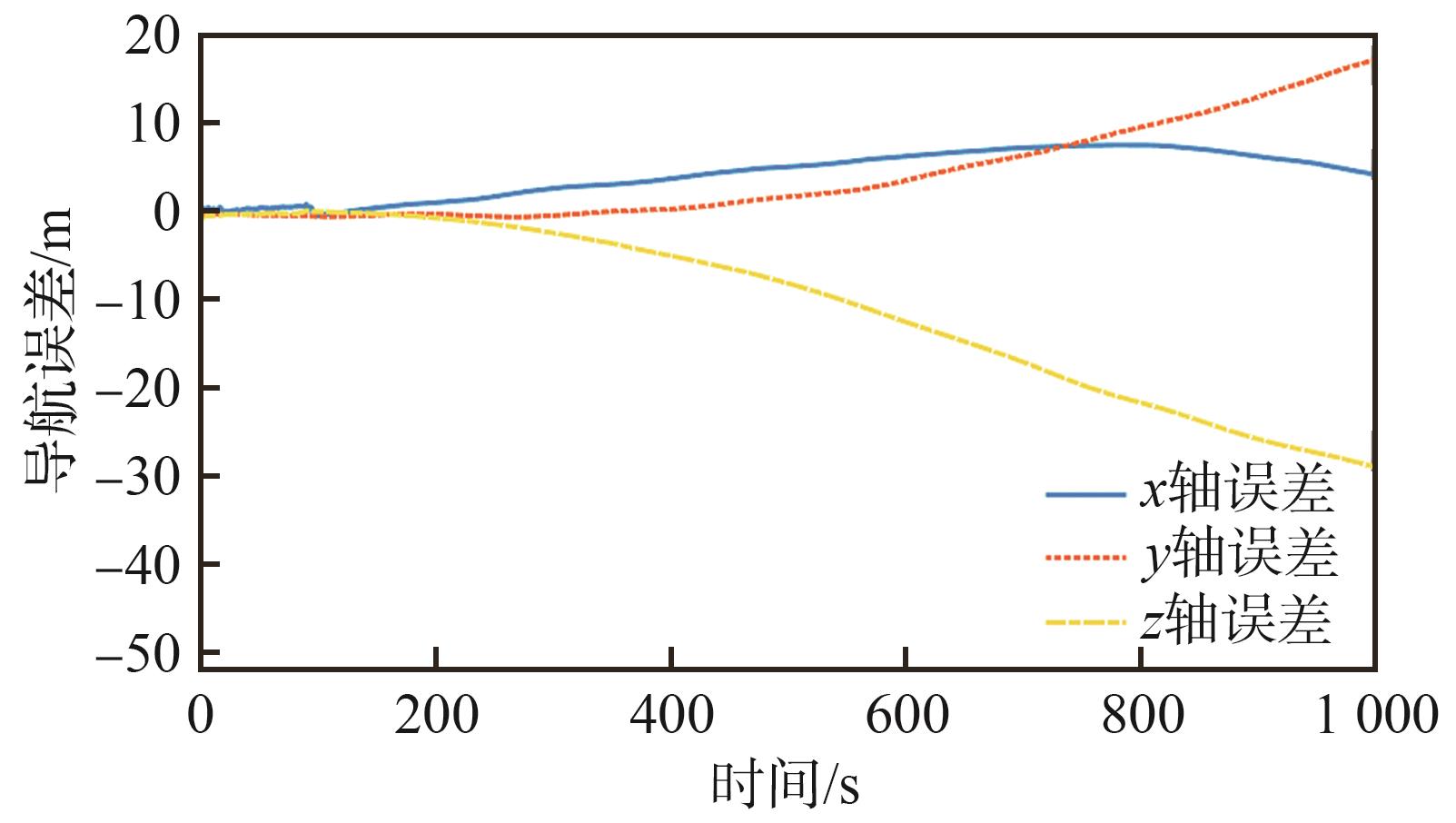
Fig.16
Navigation position error of INS/DL during GNSS-denied period
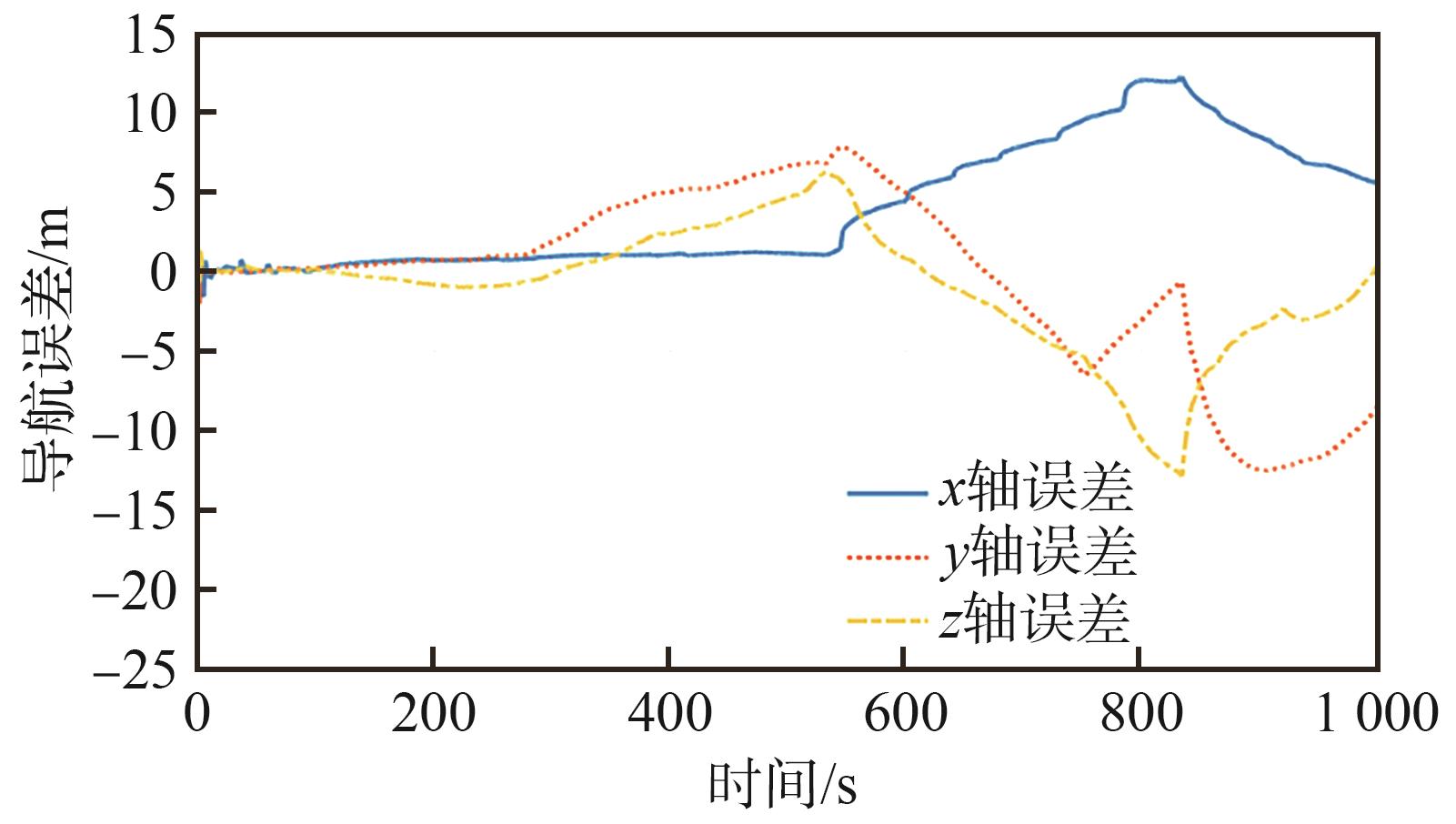
Fig.17
Navigation position error of GRNN-ENN assisted INS/DL during GNSS-denied period
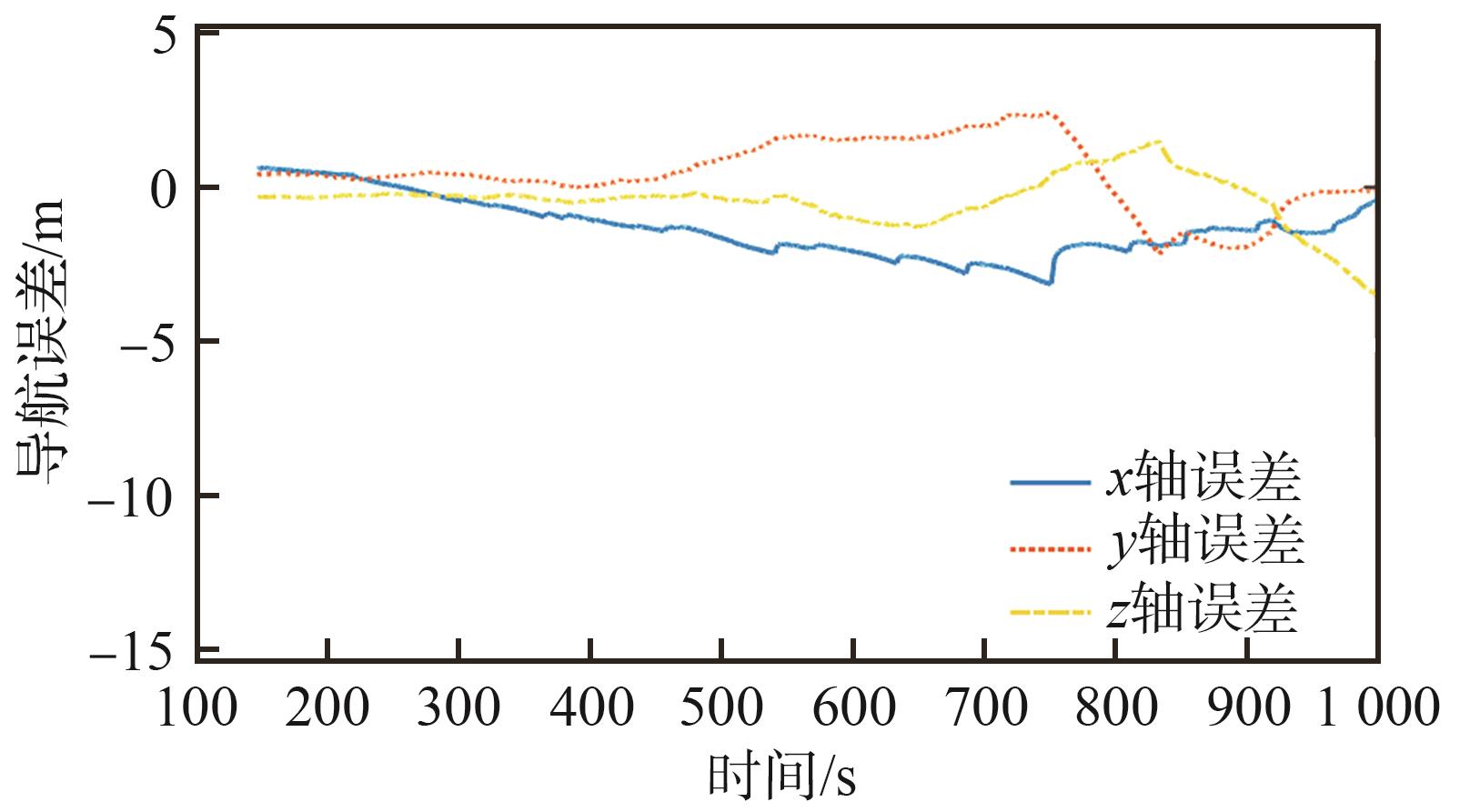
Fig 18
Navigation position error of LSTM assisted INS/DL during GNSS-denied period
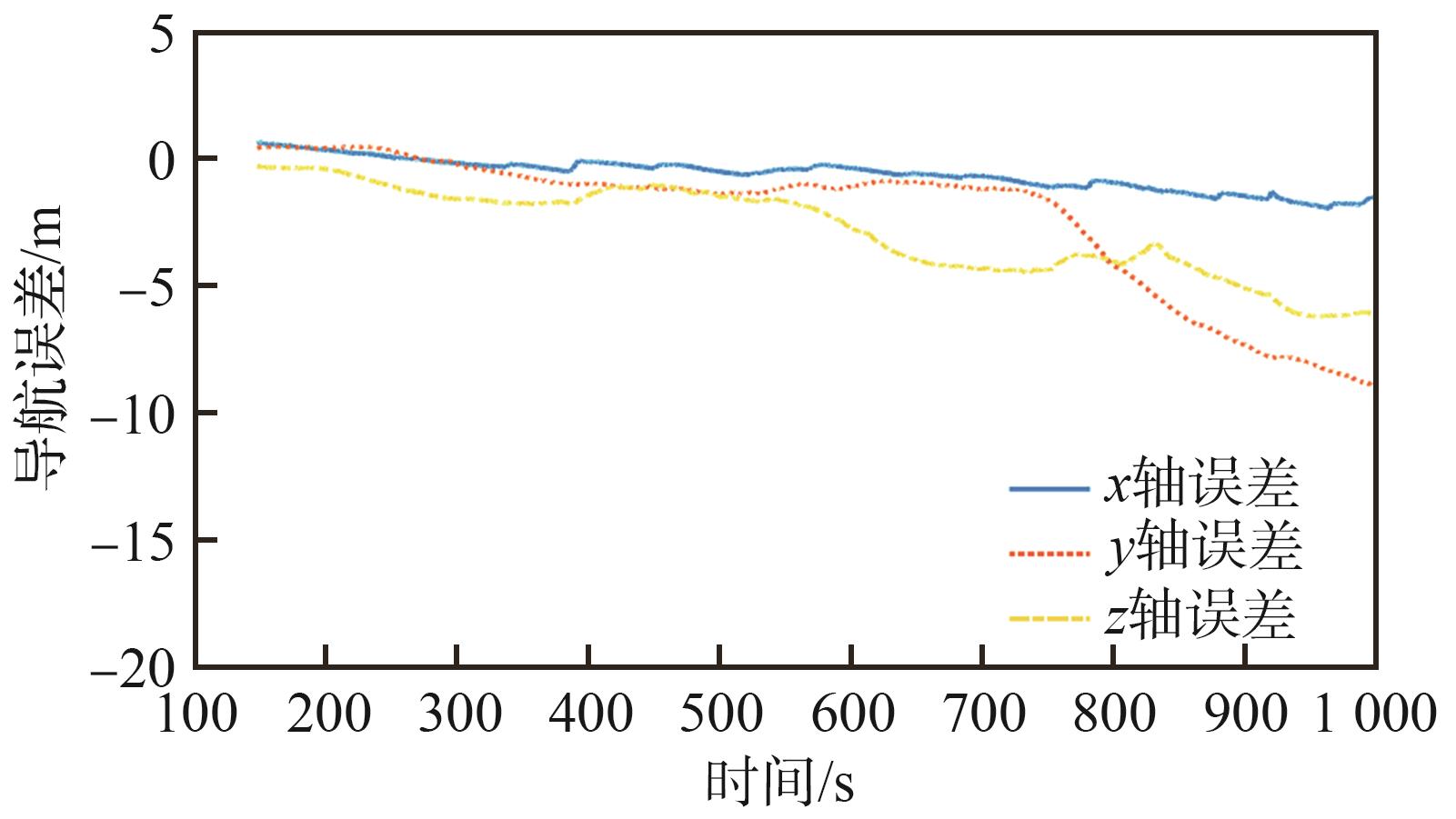
Fig 19
Navigation position error of ENN assisted INS/DL during GNSS-denied period
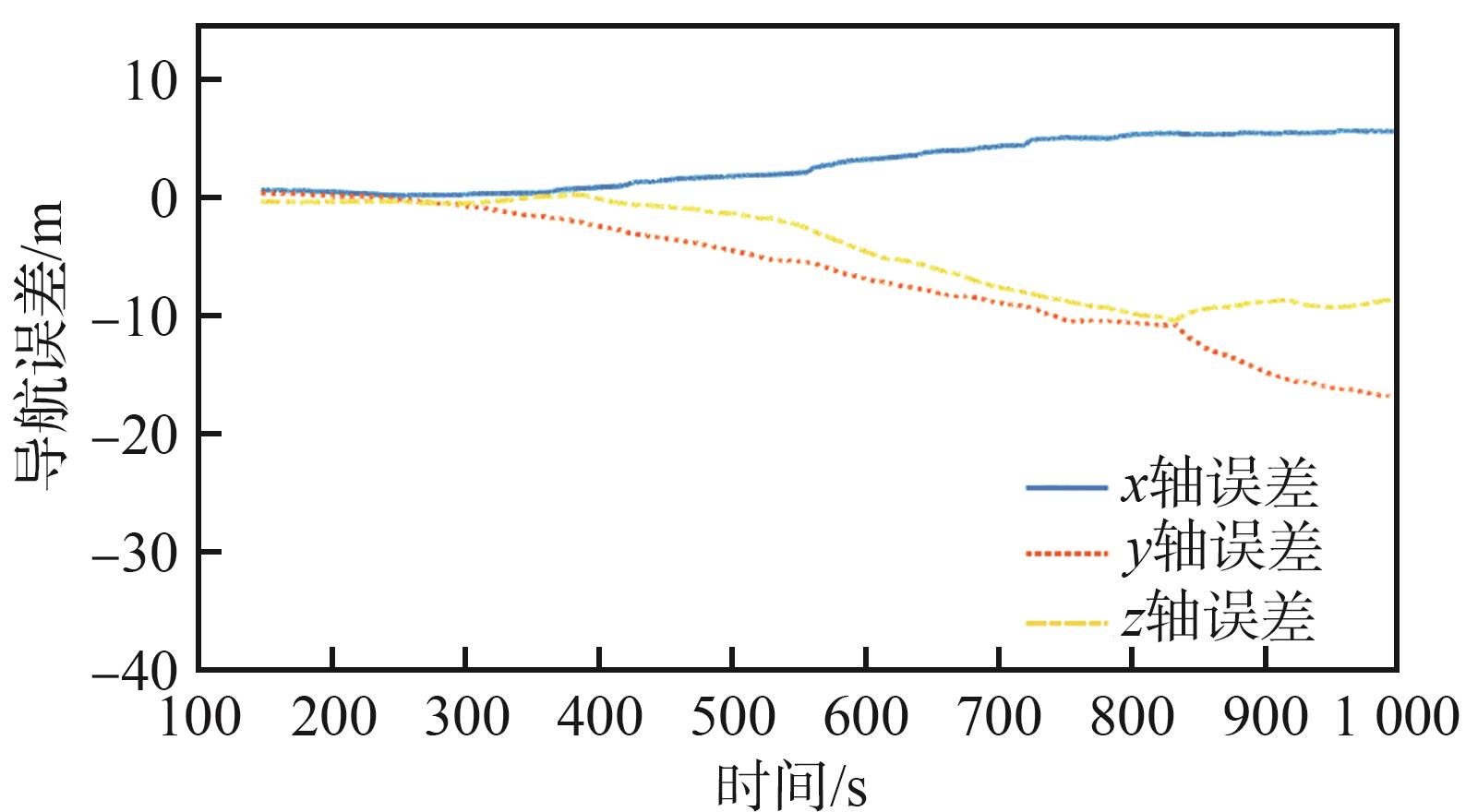
Table 8
Positioning results for 100 spacecraft during GNSS-denied period
| 算法 | 位置误差RMSE/m | |
|---|---|---|
场景时间 150~600 s | 场景时间 600~1 000 s | |
| INS | 8.561 3 | 28.106 1 |
| INS/DL | 5.580 0 | 13.423 2 |
| INS/DL+ENN | 3.080 8 | 11.738 8 |
| INS/DL+GRNN-ENN | 1.677 3 | 4.780 5 |
| INS/DL+LSTM | 1.722 5 | 5.463 0 |
Table 9
Training and forecasting statistics of neural networks for 100 spacecraft
| 算法 | 平均训练时间(5 000轮)/s | 训练RMSE(5 000轮)/m | 平均预测时间/(10-3 s) |
|---|---|---|---|
| ENN | 8.179 9 | 12.673 4 | 1.195 1 |
| GRNN-ENN | 23.212 3 | 1.789 8×10-4 | 1.102 4 |
| LSTM | 35.689 5 | 0.035 8 | 1.114 0 |
| [1] | MO J R, HU S B, YAN T T, et al. Transmit power allocation with connectivity probability for multi-QoS in cluster flight spacecraft network[J]. Wireless Communications and Mobile Computing, 2020, 2020: 8676835. |
| [2] | 苏继东, 徐伟琳, 翟盛华, 等. 航天器自组网技术实践与展望[J]. 航空学报, 2024, 45(5): 529912. |
| SU J D, XU W L, ZHAI S H, et al. Practice and prospect of space AD hoc network technology[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 529912 (in Chinese). | |
| [3] | 陈庆, 张锦绣, 曹喜滨. 集群航天器网络发展现状及关键技术[J]. 哈尔滨工业大学学报, 2017, 49(4): 1-7. |
| CHEN Q, ZHANG J X, CAO X B. Development status and key technology of spacecraft cluster network[J]. Journal of Harbin Institute of Technology, 2017, 49(4): 1-7 (in Chinese). | |
| [4] | 牛小骥, 班亚龙, 张提升, 等. GNSS/INS深组合技术研究进展与展望[J]. 航空学报, 2016, 37(10): 2895-2908. |
| NIU X J, BAN Y L, ZHANG T S, et al. Research progress and prospects of GNSS/INS deep integration[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(10): 2895-2908 (in Chinese). | |
| [5] | WANG X G, CUI N G, GUO J F. INS/VisNav/GPS relative navigation system for UAV[J]. Aerospace Science and Technology, 2013, 28(1): 242-248. |
| [6] | HARDY J, STRADER J, GROSS J N, et al. Unmanned aerial vehicle relative navigation in GPS denied environments[C]∥2016 IEEE/ION Position, Location and Navigation Symposium (PLANS). Piscataway: IEEE Press, 2016: 344-352. |
| [7] | 方文轩, 丛佃伟. 卫星/惯性/视觉组合导航多源融合技术现状及发展[J]. 无线电工程, 2022, 52(10): 1813-1820. |
| FANG W X, CONG D W. Status and development of multi-source information fusion technology for satellite/inertial/visual integrated navigation[J]. Radio Engineering, 2022, 52(10): 1813-1820 (in Chinese). | |
| [8] | 武成锋, 程进, 郭晓云, 等. 飞行器集群协同定位与导航对抗技术发展与展望[J]. 宇航学报, 2022, 43(2): 131-142. |
| WU C F, CHENG J, GUO X Y, et al. Development and prospect of aircraft clusters cooperative positioning and navigation countermeasures technology[J]. Journal of Astronautics, 2022, 43(2): 131-142 (in Chinese). | |
| [9] | 谢启龙, 宋龙, 鲁浩, 等. 协同导航技术研究综述[J]. 航空兵器, 2019, 26(4): 23-30. |
| XIE Q L, SONG L, LU H, et al. Review of Collaborative Navigation Technology[J]. Aero Weaponry, 2019, 26(4): 23-30 (in Chinese). | |
| [10] | 杜君南. 基于相对测量信息的集群飞行器协同导航关键技术研究[D]. 南京: 南京航空航天大学, 2021. |
| DU J N. Research on key technologies of cooperativenavigation of aircraft swarm based on relative measurement information[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021 (in Chinese). | |
| [11] | 王振宇. 基于惯性/线激光三角测量组合的航天器相对导航技术[D]. 南京: 南京航空航天大学, 2017. |
| WANG Z Y. Relative navigation of spacecraft based on the combination of inertial navigation and linear laser triangulation[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017 (in Chinese). | |
| [12] | 龚柏春, 王沙, 张伟夫, 等. 近地轨道航天器编队仅测距相对导航方法[J]. 宇航学报, 2022, 43(8): 1088-1096. |
| GONG B C, WANG S, ZHANG W F, et al. Range-only relative navigation for spacecraft formation in low earth orbit[J]. Journal of Astronautics, 2022, 43(8): 1088-1096 (in Chinese). | |
| [13] | 周子寒. 基于数据链相对信息的无人车协同导航与路径规划算法研究[D]. 南京: 南京航空航天大学, 2021: 18-22. |
| ZHOU Z H. Research on collaborative navigation and path planning algorithm of unmanned vehicle based on relative information assisted by data link[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021: 18-22 (in Chinese). | |
| [14] | 高超, 黄郑, 赵轩, 等. 基于构型优选的5G集群无人机协同导航方法[J]. 2024(4): 981-990. |
| GAO C, HUANG Z, ZHAO X, et al. Collaborative navigation method for 5G cluster UAV based on configuration optimization [J]. 2024(4): 981-990 (in Chinese). | |
| [15] | 魏帅迎, 杜雨桐, 胡博, 等. GNSS拒止环境下UAV集群协同导航技术发展现状及分析[J]. 导航与控制, 2023, 22(4): 5-16. |
| WEI S Y, DU Y T, HU B, et al. Development status and analysis of UAV swarm cooperative navigation technology in GNSS-denied environment[J]. Navigation and Control, 2023, 22(4): 5-16 (in Chinese). | |
| [16] | 刘鹏, 田玉平, 张亚. 有限时间一致无迹Kalman滤波器[J]. 自动化学报, 2020, 46(7): 1357-1366. |
| LIU P, TIAN Y P, ZHANG Y. Finite-time consensus based unscented Kalman filter[J]. Acta Automatica Sinica, 2020, 46(7): 1357-1366 (in Chinese). | |
| [17] | XU Y, WANG K, YANG C, et al. GNSS/INS/OD/NHC adaptive integrated navigation method considering the vehicle motion state[J]. IEEE Sensors Journal, 2023, 23(12): 13511-13523. |
| [18] | 李杰, 陈帅, 王琮, 等. 基于因子图的无人机多源组合导航算法研究[J]. 航天控制, 2021, 39(1): 52-57. |
| LI J, CHEN S, WANG C, et al. Research on UAV multi-source integrated navigation algorithm based on factor graph[J]. Aerospace Control, 2021, 39(1): 52-57 (in Chinese). | |
| [19] | ALI J, FANG J C. SINS/ANS/GPS integration using federated Kalman filter based on optimized information-sharing coefficients[C]∥ AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2005. |
| [20] | 戴海发, 卞鸿巍, 马恒, 等. 基于因子图的鲁棒性增量平滑算法的水面无人艇组合导航方法[J]. 中国惯性技术学报, 2018, 26(6): 778-786. |
| DAI H F, BIAN H W, MA H, et al. Application of robust incremental smoothing algorithm based on factor graph in integrated navigation of unmanned surface vehicle[J]. Journal of Chinese Inertial Technology, 2018, 26(6): 778-786 (in Chinese). | |
| [21] | FRASER C T, ULRICH S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation[J]. Acta Astronautica, 2021, 178: 700-721. |
| [22] | 潘献飞, 宁治文, 王茂松, 等. 基于因子图的导航定位技术应用分析与思考[J]. 控制理论与应用, 2023, 40(12): 2130-2141. |
| PAN X F, NING Z W, WANG M S, et al. Analysis and reflection on the navigation and positioning application based on factor graph[J]. Control Theory Applications, 2023, 40(12): 2130-2141 (in Chinese). | |
| [23] | LOELIGER H A. An introduction to factor graphs[J]. IEEE Signal Processing Magazine, 2004, 21(1): 28-41. |
| [24] | 罗子岩, 陈帅, 王国栋, 等. 多源融合导航系统的因子图算法综述[J]. 导航与控制, 2021, 20(3): 9-16. |
| LUO Z Y, CHEN S, WANG G D, et al. A survey of factor graph algorithms for multi-source fusion navigation system[J]. Navigation and Control, 2021, 20(3): 9-16 (in Chinese). | |
| [25] | 牛皓飞, 蔡庆中, 李健, 等. 基于图优化的通信受限环境下协同导航方法[J]. 航空学报, 2023, 44(11): 327342. |
| NIU H F, CAI Q Z, LI J, et al. Method for cooperative navigation in constrained environment based on graph optimization[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(11): 327342 (in Chinese). | |
| [26] | 熊骏, 解相朋, 熊智, 等. 基于图模型的无人集群同步自定位与相对定位[J]. 航空学报, 2023, 44(S2): 729708. |
| XIONG J, XIE X P, XIONG Z, et al. Synchronized self-localization and relative-localization of unmanned swarms based on graph model [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729708. | |
| [27] | 陈恩庆, 肖素珍, 高新利. 因子图在卫星姿态估计中的应用[J]. 计算机仿真, 2015, 32(6): 63-66. |
| CHEN E Q, XIAO S Z, GAO X L. Estimation of satellite attitude angular velocity based on factor graph[J]. Computer Simulation, 2015, 32(6): 63-66 (in Chinese). | |
| [28] | 唐成凯, 张玲玲, 廉保旺. 基于因子图协同定位辅助的单星定位方法[J]. 系统工程与电子技术, 2017, 39(5): 1085-1090. |
| TANG C K, ZHANG L L, LIAN B W. Cooperation factor map of co-location aided single satellite navigation algorithm[J]. Systems Engineering and Electronics, 2017, 39(5): 1085-1090 (in Chinese). | |
| [29] | 南子寒, 刘大禹, 苏牡丹, 等. 拒止环境下基于LSTM神经网络的自主导航方法[J]. 中国惯性技术学报, 2025, 33(4): 331-339, 349. |
| NAN Z H, LIU D Y, SU M D, et al. Autonomous navigation method based on LSTM neural network in denial environment[J]. Journal of Chinese Inertial Technology, 2025, 33(4): 331-339, 349 (in Chinese). | |
| [30] | 李正帅, 缪玲娟, 周志强, 等. 神经网络修正的速度约束辅助车载SINS定位算法[J]. 宇航学报, 2022, 43(9): 1236-1245. |
| LI Z S, MIAO L J, ZHOU Z Q, et al. Vehicle SINS positioning algorithm assisted by velocity constraint based on neural network modification[J]. Journal of Astronautics, 2022, 43(9): 1236-1245 (in Chinese). | |
| [31] | FANG W, JIANG J G, LU S Q, et al. A LSTM algorithm estimating pseudo measurements for aiding INS during GNSS signal outages[J]. Remote Sensing, 2020, 12(2): 256. |
| [32] | 白相文, 杨建华, 杨志强. 神经网络辅助的组合导航算法研究[J]. 导航定位学报, 2020, 8(1): 93-98. |
| BAI X W, YANG J H, YANG Z Q. Research on neural network-assisted integrated navigation algorithm[J]. Journal of Navigation and Positioning, 2020, 8(1): 93-98 (in Chinese). | |
| [33] | ZHANG L, HSU L T, ZHANG T. A novel INS/USBL integrated navigation scheme via factor graph optimization[J]. IEEE Transactions on Vehicular Technology, 2022, 71(9): 9239-9249. |
| [34] | 赵仁杰, 李开龙, 胡柏青, 等. 基于改进四元数阻尼误差模型的SINS初始对准算法[J]. 系统工程与电子技术, 2021, 43(11): 3330-3337. |
| ZHAO R J, LI K L, HU B Q, et al. SINS initial alignment algorithm based on improved quaternion damping error model[J]. Systems Engineering and Electronics, 2021, 43(11): 3330-3337 (in Chinese). | |
| [35] | LI X, CHEN W, CHAN C, et al. Multi-sensor fusion methodology for enhanced land vehicle positioning[J]. Information Fusion, 2019, 46: 51-62. |
| [36] | WEN W S, HSU L T. Towards robust GNSS positioning and real-time kinematic using factor graph optimization[C]∥ 2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2021: 5884-5890. |
| [37] | 乔广欣, 张慧君, 李博, 等. GNSS驯服芯片级原子钟方法研究[J]. 导航定位与授时, 2022, 9(2): 153-159. |
| QIAO G X, ZHANG H J, LI B, et al. Research on the method of GNSS-disciplined chip-scale atomic clock[J]. Navigation Positioning and Timing, 2022, 9(2): 153-159 (in Chinese). | |
| [38] | 范世伟. 自主水下航行器协同定位算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2020: 47-66. |
| FAN S W. Research on cooperative position algorithm for autonomous underwater vehicles [D]. Harbin: Harbin Institute of Technology, 2020: 47-66 (in Chinese). | |
| [39] | SPECHT D F. The general regression neural network-Rediscovered[J]. Neural Networks, 1993, 6(7): 1033-1034. |
| [40] | 陈秀德, 刘惠, 蔚保国, 等. 北斗/GNSS广域精密定位技术与服务: 现状与展望[J]. 武汉大学学报(信息科学版), 2025, 50(3): 413-429. |
| CHEN X D, LIU H, YU B G, et al. BeiDou/GNSS wide-area precise positioning technology and service: Current situation and prospects[J]. Geomatics and Information Science of Wuhan University, 2025, 50(3): 413-429 (in Chinese). | |
| [41] | 韩德强, 钟斌, 张龙平, 等. 基于星载单频BDS/GPS数据的实时低轨卫星定轨精度分析[C]∥第十二届中国卫星导航年会论文集. 北京:中国卫星导航系统管理办公室学术交流中心, 2021: 136-141. |
| HAN D Q, ZHONG B, ZHANG L P, et al. Accuracy analysis of real time LEO satellite orbit determination based on single frequency BDS/GPS data[C]∥12th China Satellite Navigation Conference (CSNC). Beijing: Academic Exchange Center of China Satellite Navigation Office, 2021: 136-141 (in Chinese). |
| [1] | Ming LIU, Jiao WU. Neural network-assisted cooperative navigation of spacecraft clusters under GNSS denials [J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(9): 532303-532303. |
| [2] | Chuang SHI, Zhixin WANG, Hao ZHANG, Tuan LI, Zhipeng WANG. Factor graph optimization based multi-GNSS positioning with robust variance component estimation [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531623-531623. |
| [3] | Ershen WANG, Zexin LIU, Deyan WANG, Tengli YU, Fanchen MENG, Yayi LIU, Song XU. Dual dynamic carrier positioning algorithm based on double factor graph and ambiguity optimization [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531332-531332. |
| [4] | Weiqing LAI, Jiuqing WAN. Distributed relative positioning of aircraft group based on path⁃sum algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328735-328735. |
| [5] | Hongfa WAN, Shanshan LI, Chaozhen LAN, Mingzhi XIANG. UAV visual positioning method based on factor graph [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727627-727627. |
| [6] | Haofei NIU, Qingzhong CAI, Jian LI, Gongliu YANG. Method for cooperative navigation in constrained environment based on graph optimization [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(11): 327342-327342. |
| [7] | GUAN Xiangzhong, CAI Chenxiao, ZHAI Wenhua, WANG Lei, SHAO Peng. Indoor integrated navigation system for unmanned aerial vehicles based on neural network predictive compensation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723790-723790. |
| [8] | LIN Jiaquan, SUN Fengshan, LI Yachong, ZHUANG Zibo. Prediction of aircraft cabin energy consumption based on IPSO-Elman neural network [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(7): 323614-323614. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341