Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (23): 632017.doi: 10.7527/S1000-6893.2025.32017
• special column • Previous Articles
Dong GAO, Pujian LAI, Shilei WANG, Gong CHENG( )
)
Received:2025-03-25
Revised:2025-04-16
Accepted:2025-05-30
Online:2025-06-30
Published:2025-06-13
Contact:
Gong CHENG
E-mail:gcheng@nwpu.edu.cn
Supported by:CLC Number:
Dong GAO, Pujian LAI, Shilei WANG, Gong CHENG. RGB-T UAV object tracking based on feature-cooperative reconstruction[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 632017.
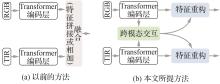
Fig.1
Comparison of proposed cross-modal interaction approach with previous methods
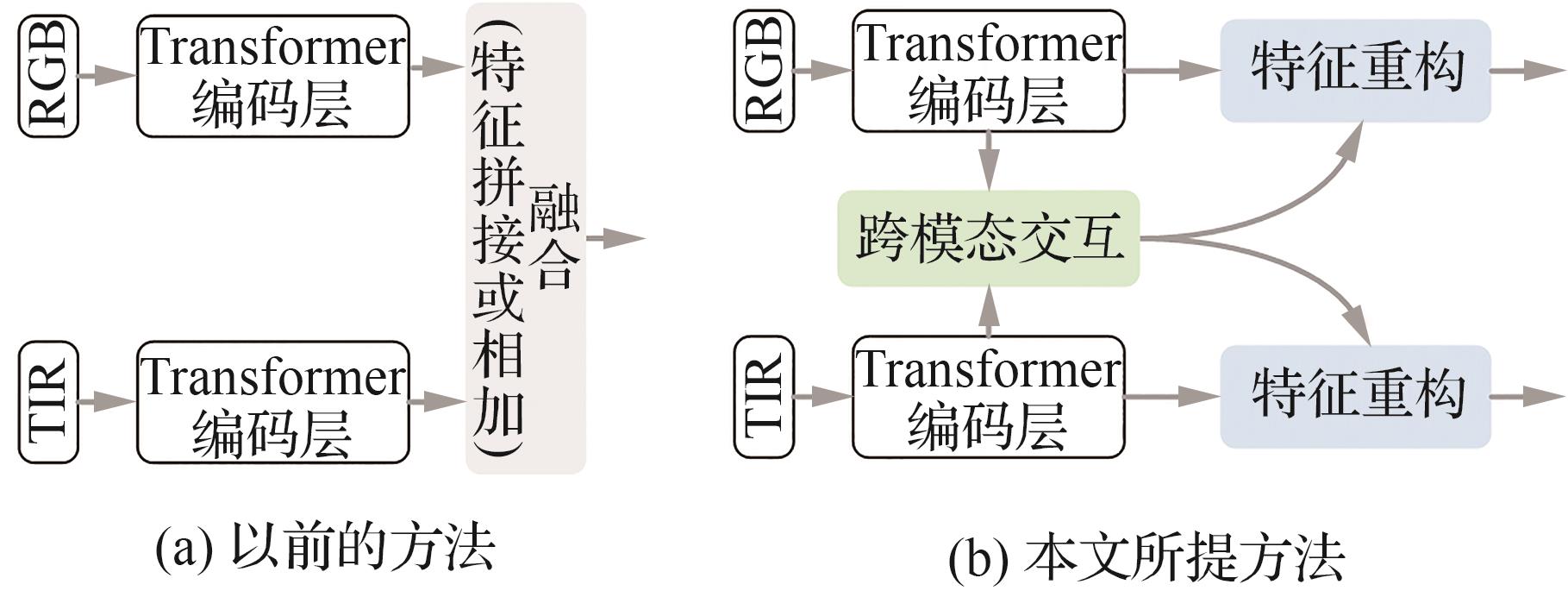
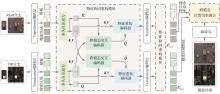
Fig.2
Overall framework of proposed method
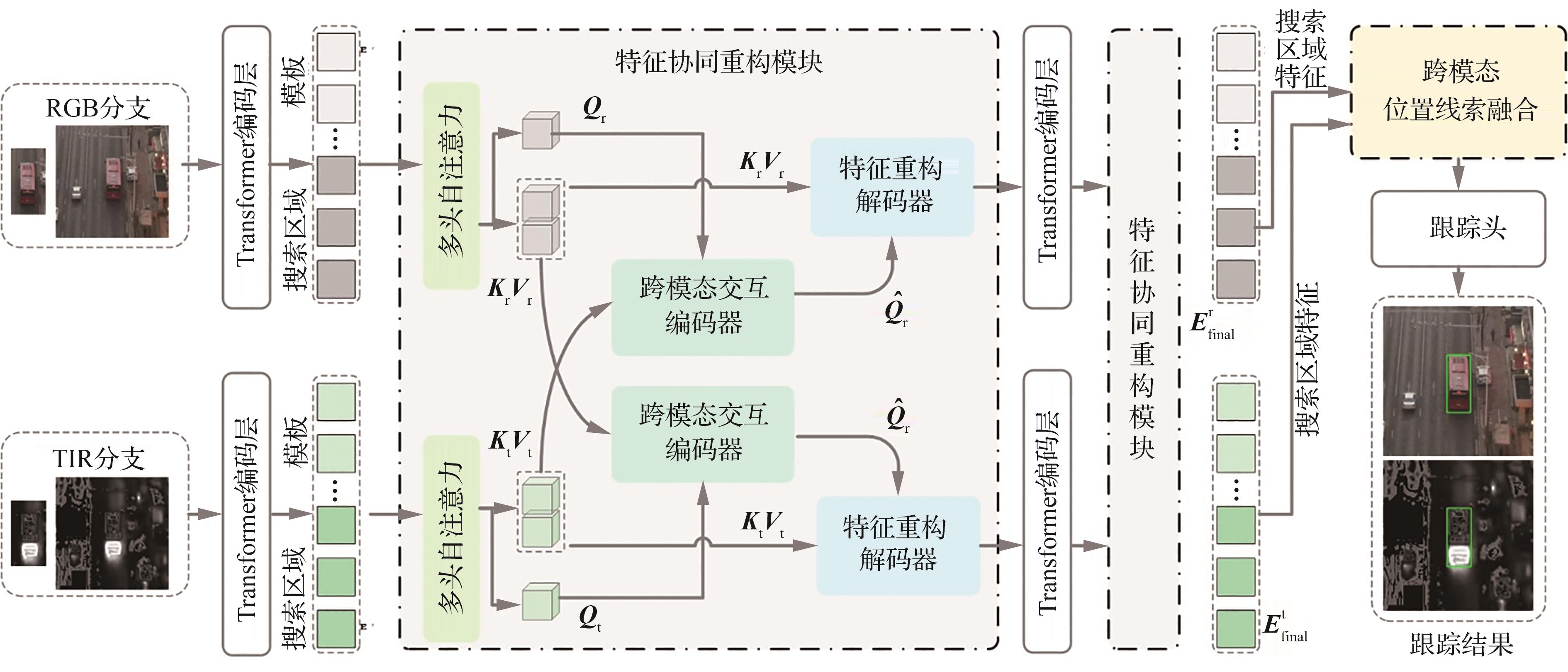
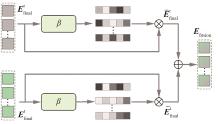
Fig.3
Illustration of the proposed cross-modal positional cue fusion module
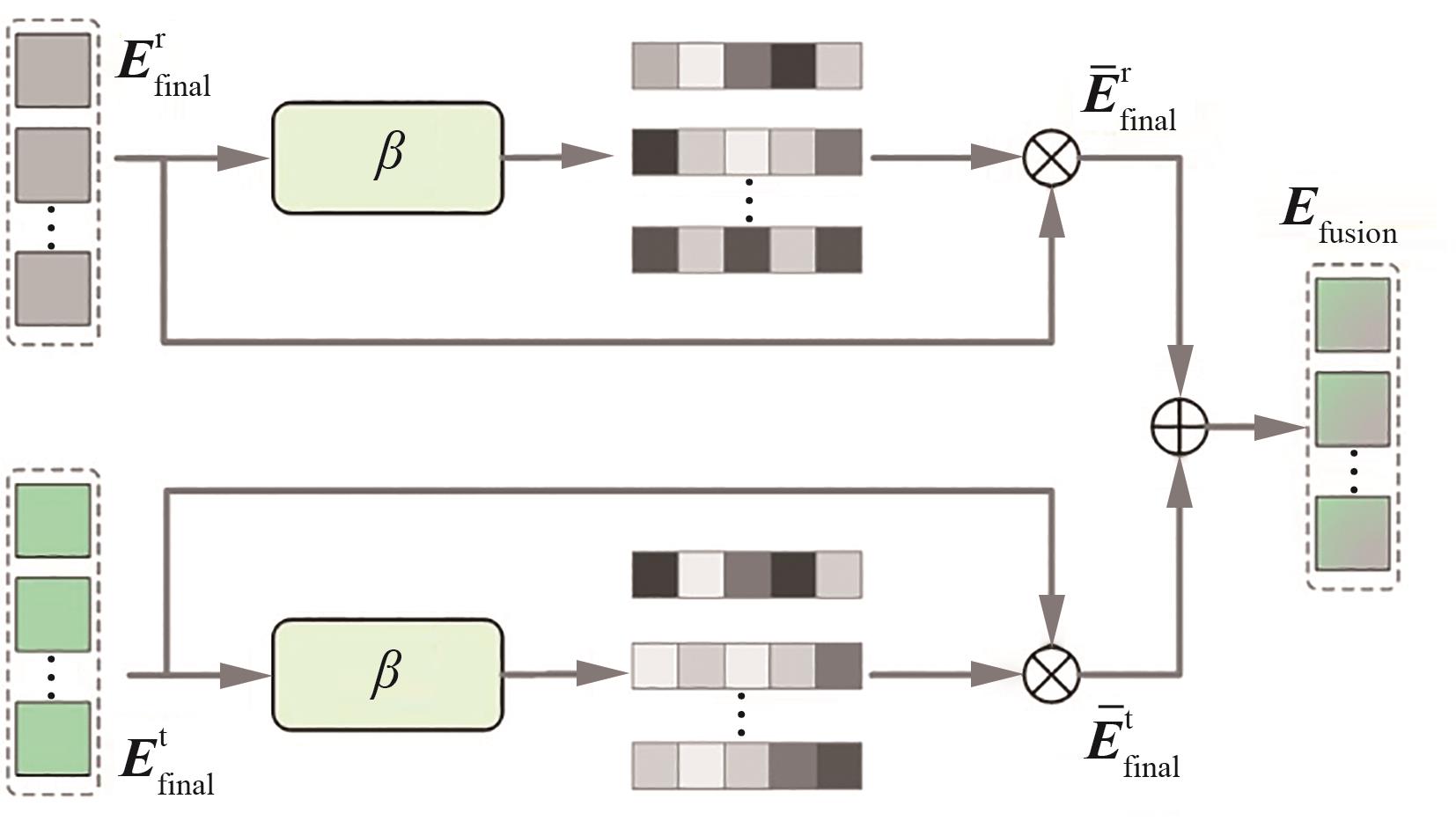
Table 1
Comparison with other trackers on VTUAV dataset
| 方法 | 最大准确率/% | 最大成功率/% |
|---|---|---|
| DAFNet[ | 62.0 | 45.8 |
| ADRNet[ | 62.2 | 46.6 |
| FSRPN[ | 65.3 | 54.4 |
| mfDiMP[ | 67.3 | 55.4 |
| QueryTrack[ | 75.5 | 63.3 |
HMFT[ TBSI[ | 75.8 82.9 | 62.7 70.8 |
| 本文方法 | 84.8 | 72.6 |
Table 2
Comparison with other trackers on HiAL dataset
| 方法 | 准确率/% | 成功率/% |
|---|---|---|
| HMFT[ | 60.2 | 49.9 |
| APFNet[ | 48.8 | 51.4 |
| CAT[ | 45.2 | 47.0 |
| ViPT[ | 59.1 | 50.8 |
| TBSI[ | 52.7 | 46.8 |
| SDSTrack[ | 54.7 | 40.2 |
| 本文方法 | 63.0 | 51.5 |
Table 3
Comparison with other trackers on the test set of LasHeR
| 方法 | 准确率/% | 归一化准确率/% | 成功率/% |
|---|---|---|---|
| CAT++[ | 50.9 | 44.4 | 35.6 |
| SiamSCR[ | 52.2 | 40.1 | |
| mfDiMP[ | 44.8 | 39.5 | 34.3 |
| CMD[ | 59.0 | 54.6 | 46.4 |
| HMFT[ | 46.0 | 41.3 | 32.6 |
| VIPT[ | 65.1 | 52.5 | |
| QueryTrack[ | 66.0 | 52.0 | |
| TBSI[ | 69.2 | 65.7 | 55.6 |
SDSTrack[ Un-Track[ | 66.5 66.7 | 53.1 53.6 | |
| 本文方法 | 70.1 | 66.6 | 56.4 |
Table 4
Success rate scores of different attributes on LasHeR
| 属性 | 本文方法/% | TBSI/% | VIPT/% | SDSTrack/% |
|---|---|---|---|---|
| HI | 73.6/58.0 | 72.6/56.7 | 67.9/54.2 | 69.2/55.3 |
| LI | 61.1/49.4 | 60.5/49.0 | 49.8/41.2 | 53.5/44.0 |
| MB | 62.8/49.8 | 62.8/49.6 | 57.3/45.9 | 59.8/47.6 |
| HO | 58.4/52.1 | 60.3/49.6 | 47.3/43.8 | 58.9/52.8 |
| TO | 64.3/51.4 | 62.3/49.6 | 57.6/46.1 | 60.0/47.8 |
| PO | 67.2/54.0 | 64.6/51.6 | 62.4/50.3 | 63.1/50.8 |
| NO | 91.1/74.2 | 90.1/73.9 | 84.0/68.4 | 87.4/71.3 |
| ARV | 62.8/51.9 | 60.3/49.6 | 59.3/49.5 | 60.7/50.3 |
| SV | 69.9/56.4 | 66.7/54.2 | 65.0/52.5 | 66.1/53.3 |
| FM | 68.4/55.6 | 59.2/46.7 | 63.1/51.4 | 65.3/53.1 |
| OV | 64.4/57.0 | 65.6/57.3 | 76.2/65.0 | 69.6/60.7 |
| FL | 57.0/45.8 | 57.5/45.2 | 59.1/46.5 | 59.3/46.6 |
| TC | 62.3/50.3 | 62.5/49.8 | 57.3/46.0 | 57.4/46.3 |
| CM | 67.8/54.3 | 68.0/54.8 | 62.1/50.0 | 63.4/50.9 |
| SA | 61.3/49.7 | 59.0/47.6 | 57.3/46.5 | 57.2/46.3 |
| BC | 68.2/55.0 | 65.2/52.4 | 64.9/51.8 | 64.0/51.7 |
| DEF | 72.4/59.7 | 60.5/58.3 | 67.4/55.7 | 69.3/56.8 |
| LR | 62.4/46.4 | 60.5/44.4 | 56.4/41.6 | 57.2/42.6 |
| AIV | 54.8/47.2 | 57.5/49.8 | 37.5/35.0 | 54.2/48.3 |
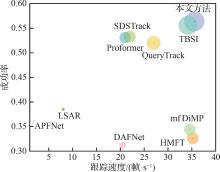
Fig.4
Visualization of tracking speed and success rate on LasHeR
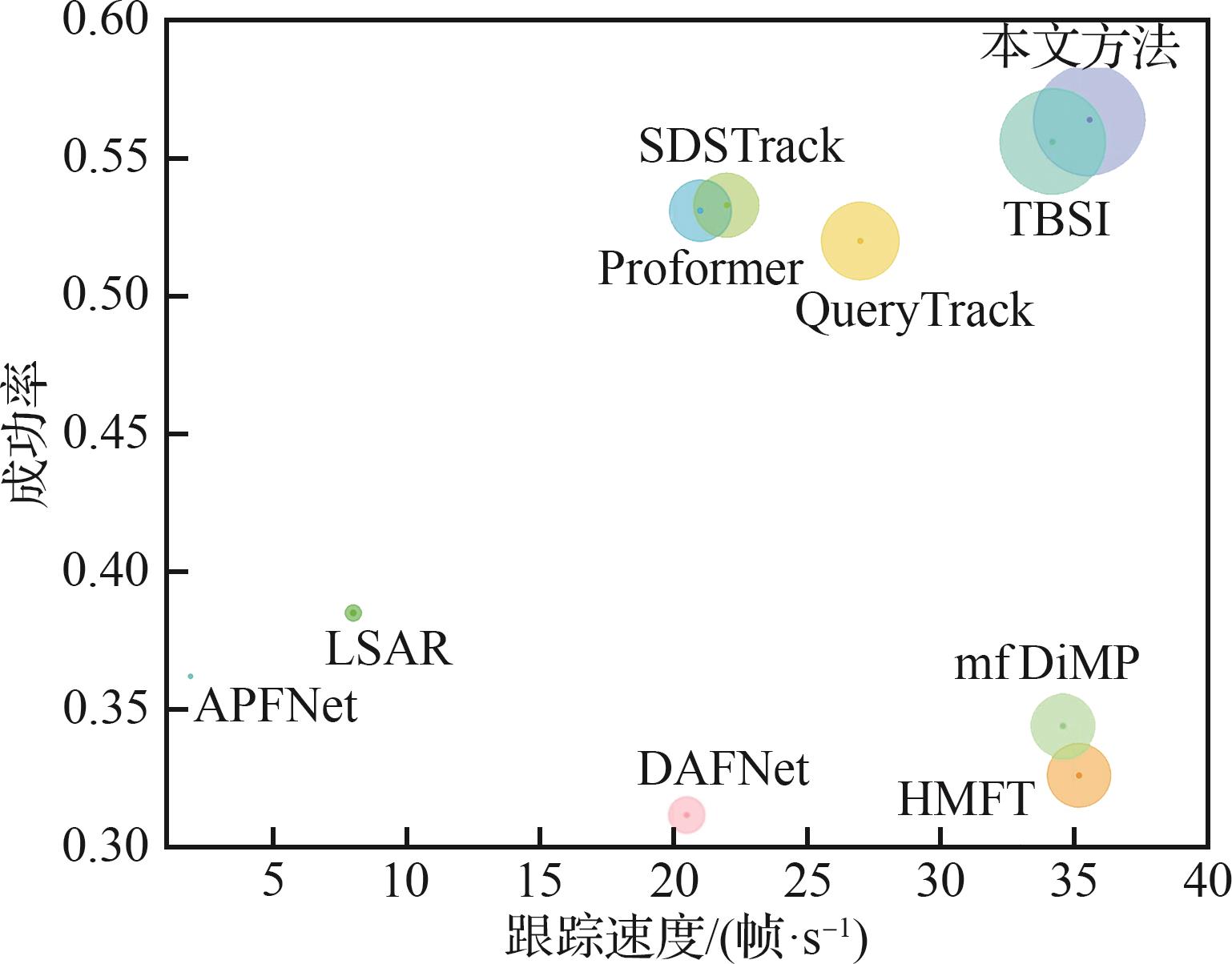
Table 5
Comparison about SR, speed, GFLOPs, and number of parameters on GPU GTX 3090
| 方法 | 最大 成功率/% | 速度/(帧·s-1) | 运算量/GFLOPs | 参数量/ |
|---|---|---|---|---|
| TBSI[ | 70.8 | 34.2* | 82.5 | 2.02 |
方法 本文 | 72.6 | 35.6 | 74.3 | 2.00 |
Table6
Ablation experiments with different modules
| 方法 | VTUAV | LasHeR | ||||
|---|---|---|---|---|---|---|
| 最大准确率/% | 最大成功率/% | 准确率/% | 归一化准确率/% | 成功率/% | ||
| 基线网络 | 80.4 | 67.7 | 68.9 | 65.3 | 55.1 | |
| +FCR | 83.9 | 71.6 | 69.6 | 65.7 | 55.9 | |
| +CPF | 82.3 | 70.4 | 69.7 | 65.8 | 55.8 | |
| +FCR+CPF | 84.8 | 72.6 | 70.1 | 66.6 | 56.4 | |
Table 7
Ablation studies on effect of inserting the proposed feature-cooperative reconstruction module into different layers
| 插入层 | 最大准确率/% | 最大成功率/% | ||
|---|---|---|---|---|
| 4 | 7 | 10 | ||
| × | × | × | 82.3 | 70.4 |
| √ | × | × | 83.7 | 71.8 |
| √ | √ | × | 84.1 | 71.9 |
| √ | √ | √ | 84.8 | 72.6 |

Fig.5
Qualitative comparison of tracker of this paper and other trackers on VTUAV dataset


Fig.6
Visualization of heat maps

| [1] | 陈琳, 刘允刚. 面向无人机的视觉目标跟踪算法: 综述与展望[J]. 信息与控制, 2022, 51(1): 23-40. |
| CHEN L, LIU Y G. UAV visual target tracking algorithms: Review and future prospect[J]. Information and Control, 2022, 51(1): 23-40 (in Chinese). | |
| [2] | 褚昭晨, 宋韬, 金忍, 等. 基于视觉图像的空对空多无人机目标跟踪[J]. 航空学报, 2024, 45(14): 629379. |
| CHU Z C, SONG T, JIN R, et al. Vision-based air-to-air multi-UAVs tracking[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 629379 (in Chinese). | |
| [3] | 薛远亮, 金国栋, 谭力宁, 等. 基于多尺度融合的自适应无人机目标跟踪算法[J]. 航空学报, 2023, 44(1): 326107. |
| XUE Y L, JIN G D, TAN L N, et al. Adaptive UAV target tracking algorithm based on multi-scale fusion[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(1): 326107 (in Chinese). | |
| [4] | 刘贞报, 马博迪, 高红岗, 等. 基于形态自适应网络的无人机目标跟踪方法[J]. 航空学报, 2021, 42(4): 524904. |
| LIU Z B, MA B D, GAO H G, et al. Adaptive morphological network based UAV target tracking algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524904 (in Chinese). | |
| [5] | BHAT G, DANELLJAN M, VAN GOOL L, et al. Learning discriminative model prediction for tracking[C]∥2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2019: 6181-6190. |
| [6] | DANELLJAN M, BHAT G, KHAN F S, et al. ATOM: Accurate tracking by overlap maximization[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2019: 4655-4664. |
| [7] | ZHU J W, LAI S M, CHEN X, et al. Visual prompt multi-modal tracking[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2023: 9516-9526. |
| [8] | ZHANG P Y, ZHAO J, WANG D, et al. Visible-thermal UAV tracking: A large-scale benchmark and new baseline[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 8876-8885. |
| [9] | CAO B, GUO J L, ZHU P F, et al. Bi-directional adapter for multimodal tracking[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2024, 38(2): 927-935. |
| [10] | CUI Y T, JIANG C, WANG L M, et al. MixFormer: End-to-end tracking with iterative mixed attention[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022. |
| [11] | HUI T R, XUN Z Z, PENG F G, et al. Bridging search region interaction with template for RGB-T tracking[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2023. |
| [12] | WANG Y K, SUN F C, HUANG W B, et al. Channel exchanging networks for multimodal and multitask dense image prediction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(5): 5481-5496. |
| [13] | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16x16 words: Transformers for image recognition at scale[DB/OL]. arXiv preprint: 2010.11929, 2020. |
| [14] | 肖云, 曹丹, 李成龙, 等. 基于高空无人机平台的多模态跟踪数据集[J]. 中国图象图形学报, 2025, 30(2): 361-374. |
| XIAO Y, CAO D, LI C L, et al. A benchmark dataset for high-altitude UAV multi-modal tracking[J]. Journal of Image and Graphics, 2025, 30(2): 361-374 (in Chinese). | |
| [15] | LAI P J, CHENG G, ZHANG M L, et al. NCSiam: Reliable matching via neighborhood consensus for Siamese-based object tracking[J]. IEEE Transactions on Image Processing, 2023, 32: 6168-6182. |
| [16] | XU Y D, WANG Z Y, LI Z X, et al. SiamFC++: towards robust and accurate visual tracking with target estimation guidelines[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(7): 12549-12556. |
| [17] | CHEN Z D, ZHONG B N, LI G R, et al. Siamese box adaptive network for visual tracking[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020. |
| [18] | ZHANG T L, LIU X R, ZHANG Q, et al. SiamCDA: Complementarity-and distractor-aware RGB-T tracking based on Siamese network[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2022, 32(3): 1403-1417. |
| [19] | HOU X J, XING J Z, QIAN Y J, et al. SDSTrack: Self-distillation symmetric adapter learning for multi-modal visual object tracking[C]∥2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2024. |
| [20] | YE B T, CHANG H, MA B P, et al. Joint feature learning andRelation modeling forTracking: A one-stream framework[C]∥Computer Vision-ECCV 2022. Cham: Springer, 2022: 341-357. |
| [21] | LAW H, DENG J. CornerNet: Detecting objects as paired keypoints[C]∥Computer Vision-ECCV 2018. Cham: Springer, 2018: 765-781. |
| [22] | REZATOFIGHI H, TSOI N, GWAK J, et al. Generalized intersection over union: A metric and a loss for bounding box regression[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2019: 658-666. |
| [23] | MULLER M, BIBI A, GIANCOLA S, et al. Trackingnet: A large-scale dataset and benchmark for object tracking in the wild[C]∥Proceedings of the European conference on computer vision (ECCV). 2018: 300-317. |
| [24] | LI C L, XUE W L, JIA Y Q, et al. LasHeR: A large-scale high-diversity benchmark for RGBT tracking[J]. IEEE Transactions on Image Processing, 2021, 31: 392-404. |
| [25] | LOSHCHILOV I, HUTTER F. Decoupled weight decay regularization[DB/OL]. arXiv preprint: 1711.05101, 2017. |
| [26] | GAO Y, LI C, ZHU Y, et al. Deep adaptive fusion nework for high performance RGBT tracking[C]∥Proceedings of the IEEE/CVF international conference on computer vision workshops. Piscataway: IEEE Press, 2019. |
| [27] | ZHANG P Y, WANG D, LU H C, et al. Learning adaptive attribute-driven representation for real-time RGB-T tracking[J]. International Journal of Computer Vision, 2021, 129(9): 2714-2729. |
| [28] | KRISTAN M, MATAS J, LEONARDIS A, et al. The seventh visual object tracking VOT2019 challenge results[C]∥2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW). Piscataway: IEEE Press, 2019. |
| [29] | ZHANG L C, DANELLJAN M, GONZALEZ-GARCIA A, et al. Multi-modal fusion for end-to-end RGB-T tracking[C]∥2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW). Piscataway: IEEE Press, 2019. |
| [30] | FAN H J, YU Z C, WANG Q, et al. QueryTrack: Joint-modality query fusion network for RGBT tracking[J]. IEEE Transactions on Image Processing, 2024, 33: 3187-3199. |
| [31] | XIAO Y, YANG M M, LI C L, et al. Attribute-based progressive fusion network for RGBT tracking[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(3): 2831-2838. |
| [32] | LIU L, LI C L, XIAO Y, et al. RGBT tracking via challenge-based appearance disentanglement and interaction[J]. IEEE Transactions on Image Processing, 2024, 33: 1753-1767. |
| [33] | ZHANG T L, GUO H Y, JIAO Q, et al. Efficient RGB-T tracking via cross-modality distillation[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2023: 5404-5413. |
| [34] | LIU Y S, ZHOU D M, CAO J D, et al. Specific and collaborative representations Siamese network for RGBT tracking[J]. IEEE Sensors Journal, 2024, 24(11): 18520-18534. |
| [35] | WU Z W, ZHENG J L, REN X X, et al. Single-model and any-modality for video object tracking[C]∥2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2024: 19156-19166. |
| [1] | Jiong HE, Binwu REN, Siliang DU, Yousong XU, Bo WANG. Adaptive attitude control for tilt-quadrotor UAV based on ADRC-RBF [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(S1): 732189-732189. |
| [2] | Xiangyu YU, Wen LI, Jie YAN, Shizhe LIANG. Simulation research on thermal management system of fuel cell for liquid hydrogen powered UAV [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 630964-630964. |
| [3] | Pengqian YANG, Yutong CHEN, Junhui LIU, Jiehao YANG, Jiayuan SHAN, Shijun SUN. Aerodynamic and operational characteristics analysis for tandem wing cargo UAV at high angle of attack [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 131056-131056. |
| [4] | Rongzu LI, Li LIU, Dun YANG. Optimal design of hydrogen-powered UAV based on multi-source domain fusion surrogate model [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(9): 630979-630979. |
| [5] | Kaifang WAN, Zhilin WU, Yunhui WU, Haozhi QIANG, Yibo WU, Bo LI. Cooperative location of multiple UAVs with deep reinforcement learning in GPS-denied environment [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331024-331024. |
| [6] | Lingfeng JIANG, Xinkai LI, Hai ZHANG, Hanwei LI, Hongli ZHANG. Mapless navigation of UAVs in dynamic environments based on an improved TD3 algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(8): 331035-331035. |
| [7] | Jinwu XIANG, Kai MA, Zi KAN, Daochun LI, Kexin ZHENG, Hanxuan CHEN. Review of key technologies for hydrogen powered unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(5): 531603-531603. |
| [8] | Qishuai DING, Bangjun LEI, Zhengping WU. A lightweight single object tracking algorithm for UAVs based on Siamese network [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330925-330925. |
| [9] | Nuo MA, Shechun WEI, Junhui MENG, Qingyang LIU, Yusheng LEI. Flow field characteristics and dynamics of internal supply chamber separating from UAV considering effect of deceleration parachutes [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 130755-130755. |
| [10] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [11] | Wei HUANG, Jiahao PAN, Chu HE. Wavelet time-frequency localization-based model compression for UAV object detection [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631952-631952. |
| [12] | Kui LIU, Hao SUN, Han WU, Kefeng JI, Gangyao KUANG. Dynamic brightness reconstruction for UAV visible-infrared fusion object detection [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 631968-631968. |
| [13] | Yicheng SONG, Ruiyun QI, Bin JIANG. Distributed topology reconstruction of UAV formation network under communication fault [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331914-331914. |
| [14] | Shuai ZHONG, Liping WANG. MCS-RETR: Improved RT-DETR object detection method for UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331987-331987. |
| [15] | Chao YAN, Zexu ZHANG, Hutao CUI, Kai ZHANG, Jingzong LIU. Predefined-time affine formation maneuvering control for fixed-wing UAV swarm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331824-331824. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341