Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (22): 331824.doi: 10.7527/S1000-6893.2024.31824
• Electronics and Electrical Engineering and Control • Previous Articles
Chao YAN, Zexu ZHANG( ), Hutao CUI, Kai ZHANG, Jingzong LIU
), Hutao CUI, Kai ZHANG, Jingzong LIU
Received:2025-01-20
Revised:2025-02-27
Accepted:2025-03-17
Online:2025-03-28
Published:2025-03-28
Contact:
Zexu ZHANG
E-mail:zexuzhang@hit.edu.cn
Supported by:CLC Number:
Chao YAN, Zexu ZHANG, Hutao CUI, Kai ZHANG, Jingzong LIU. Predefined-time affine formation maneuvering control for fixed-wing UAV swarm[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331824.

Fig.1
Fixed-wing UAV model and variable descriptions
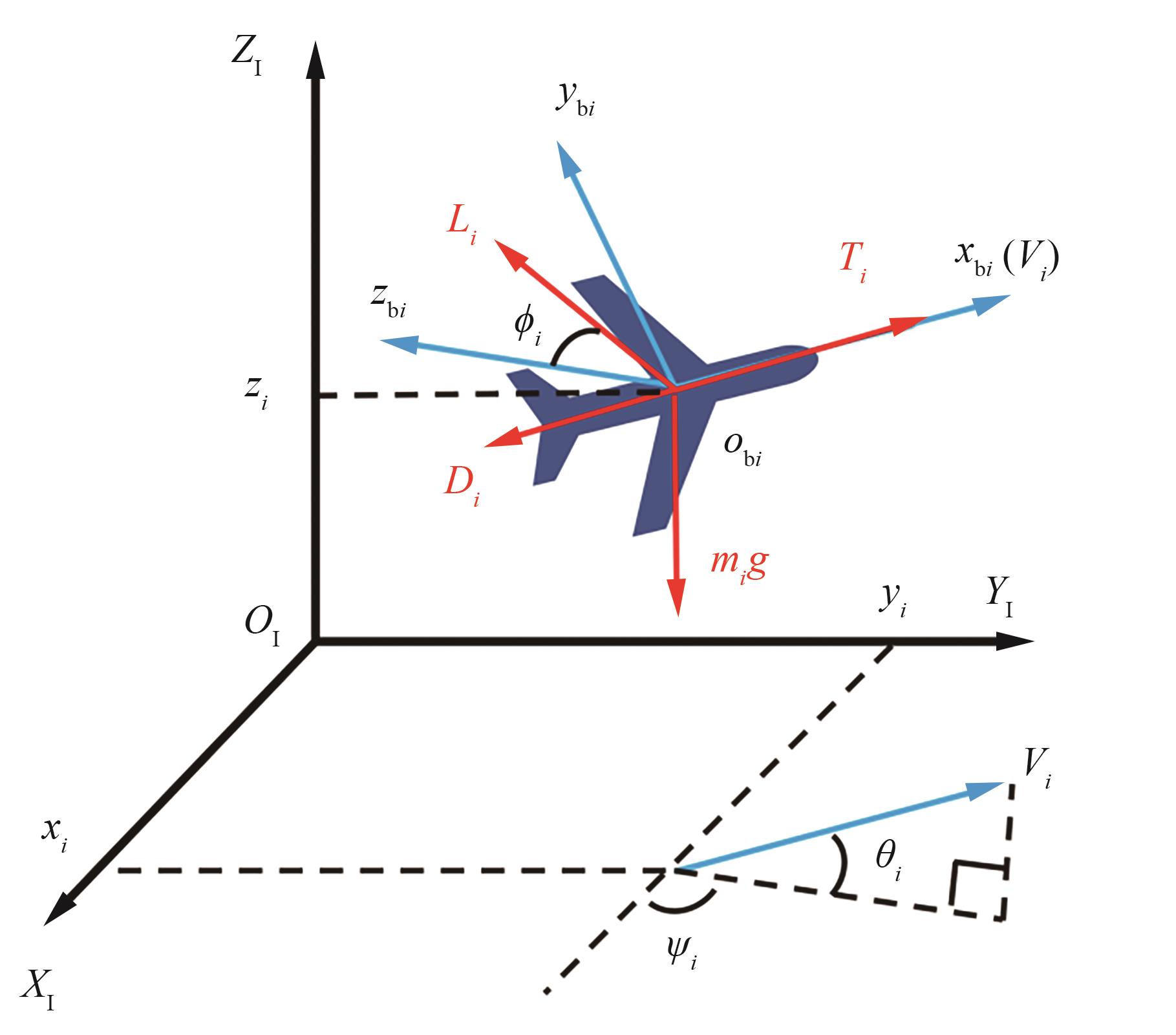
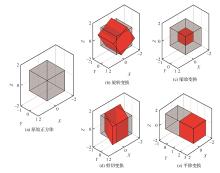
Fig.2
Affine transformations in three-dimensional space
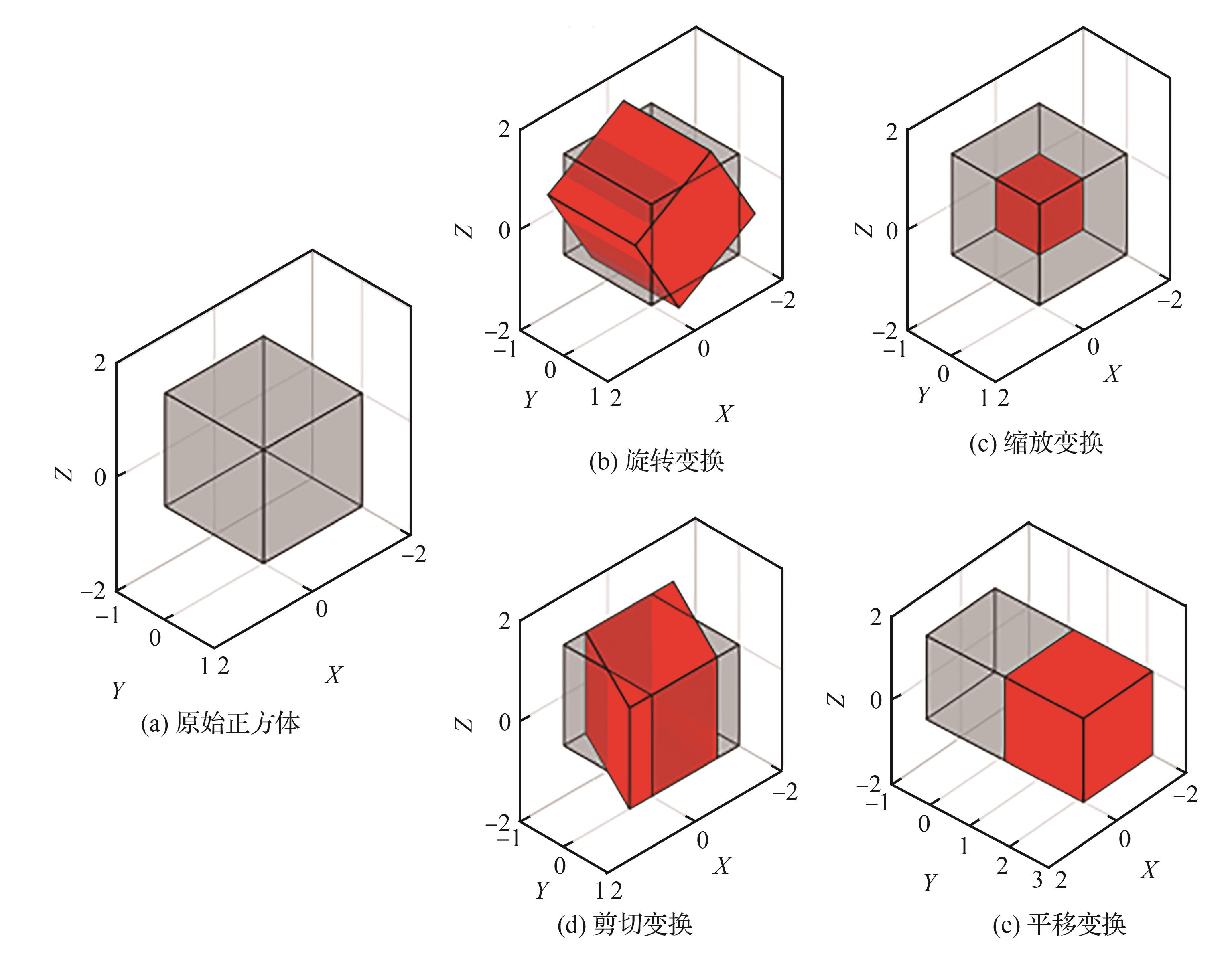

Fig.3
Fixed-wing UAV swarm predefined-time affine formation maneuver control framework
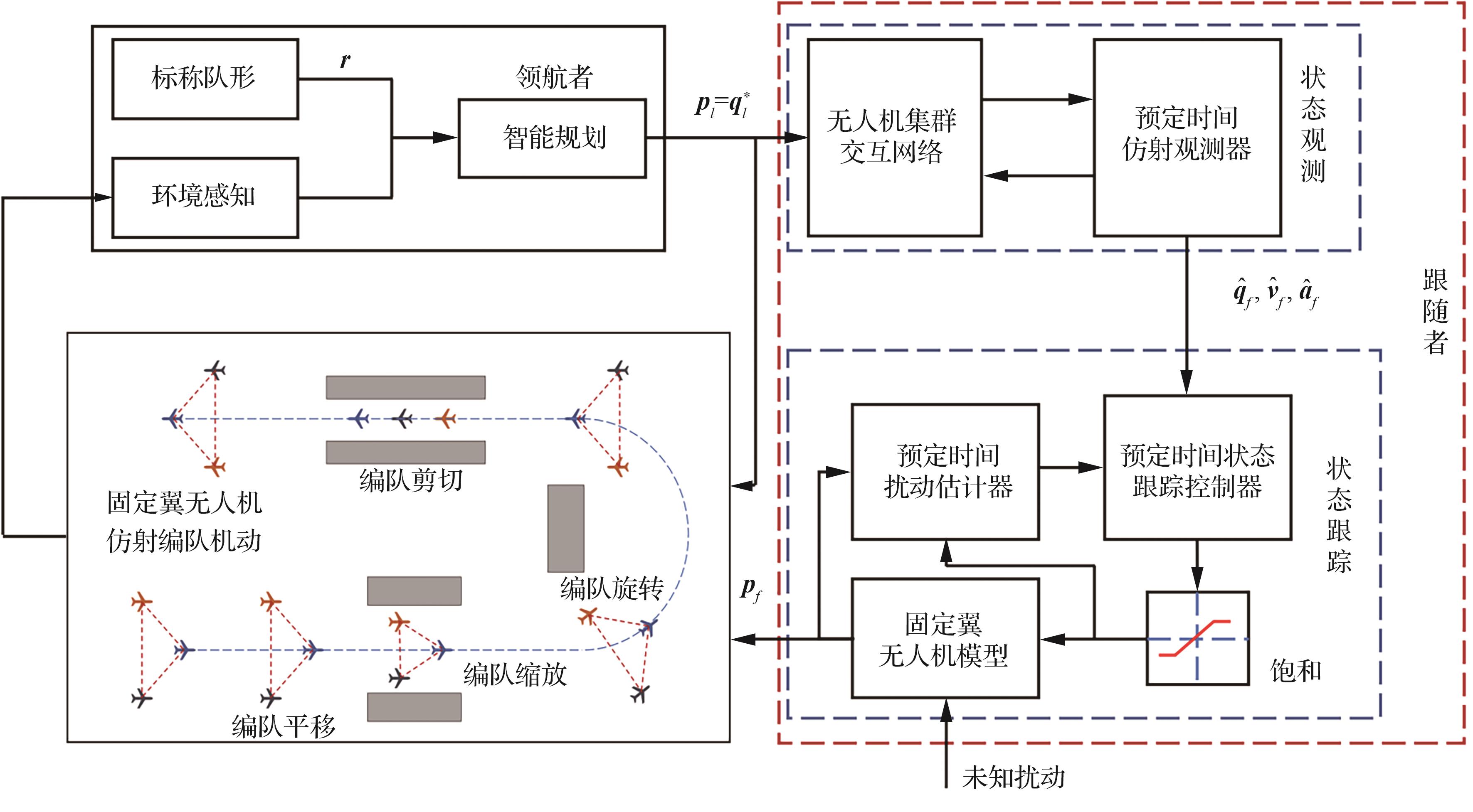
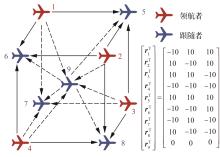
Fig.4
Nominal formation of a cube with 9 UAVs and formation matrix
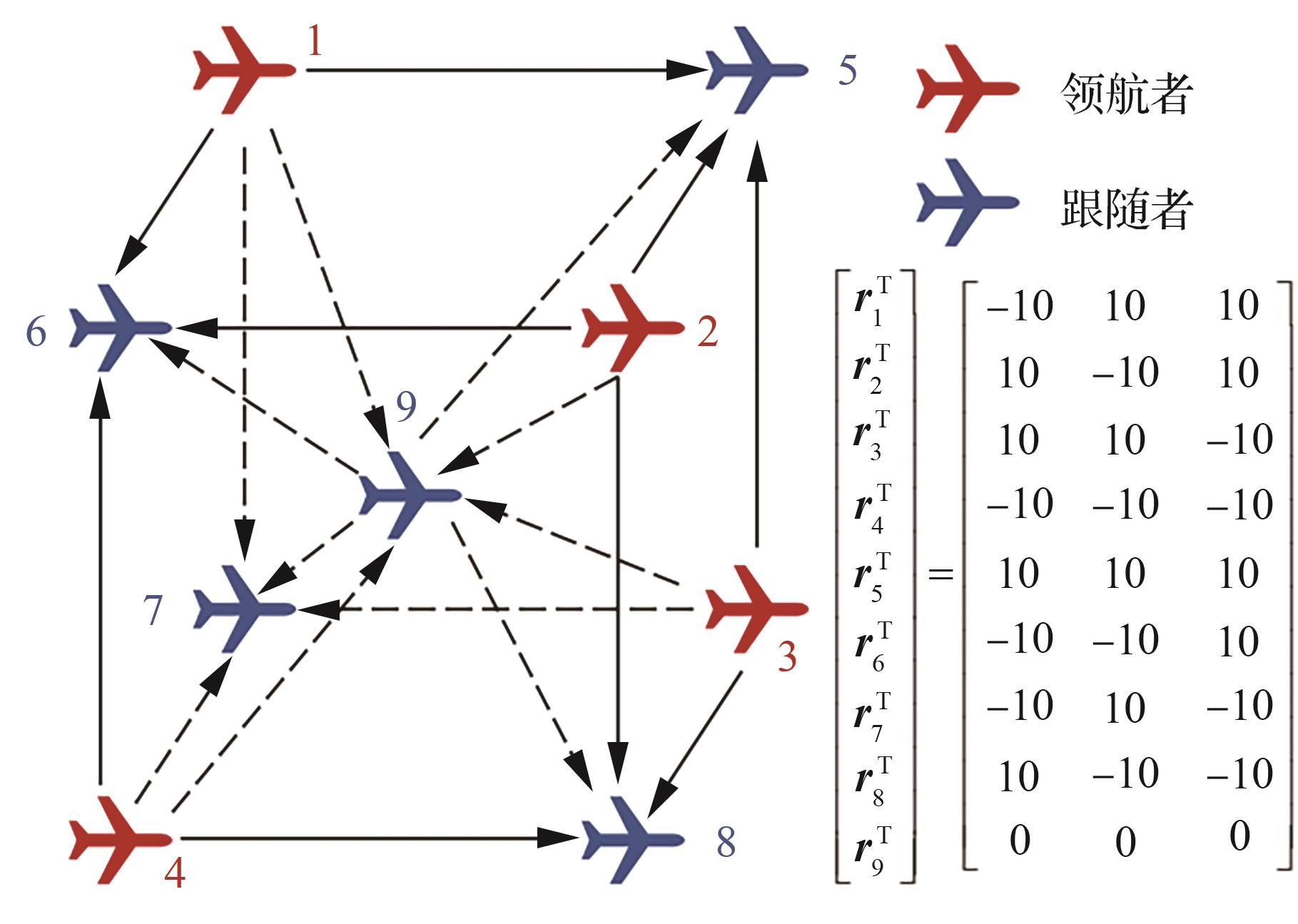
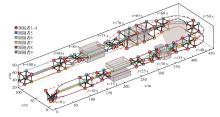
Fig.5
Affine formation maneuver trajectories of 9 fixed-wing UAVs
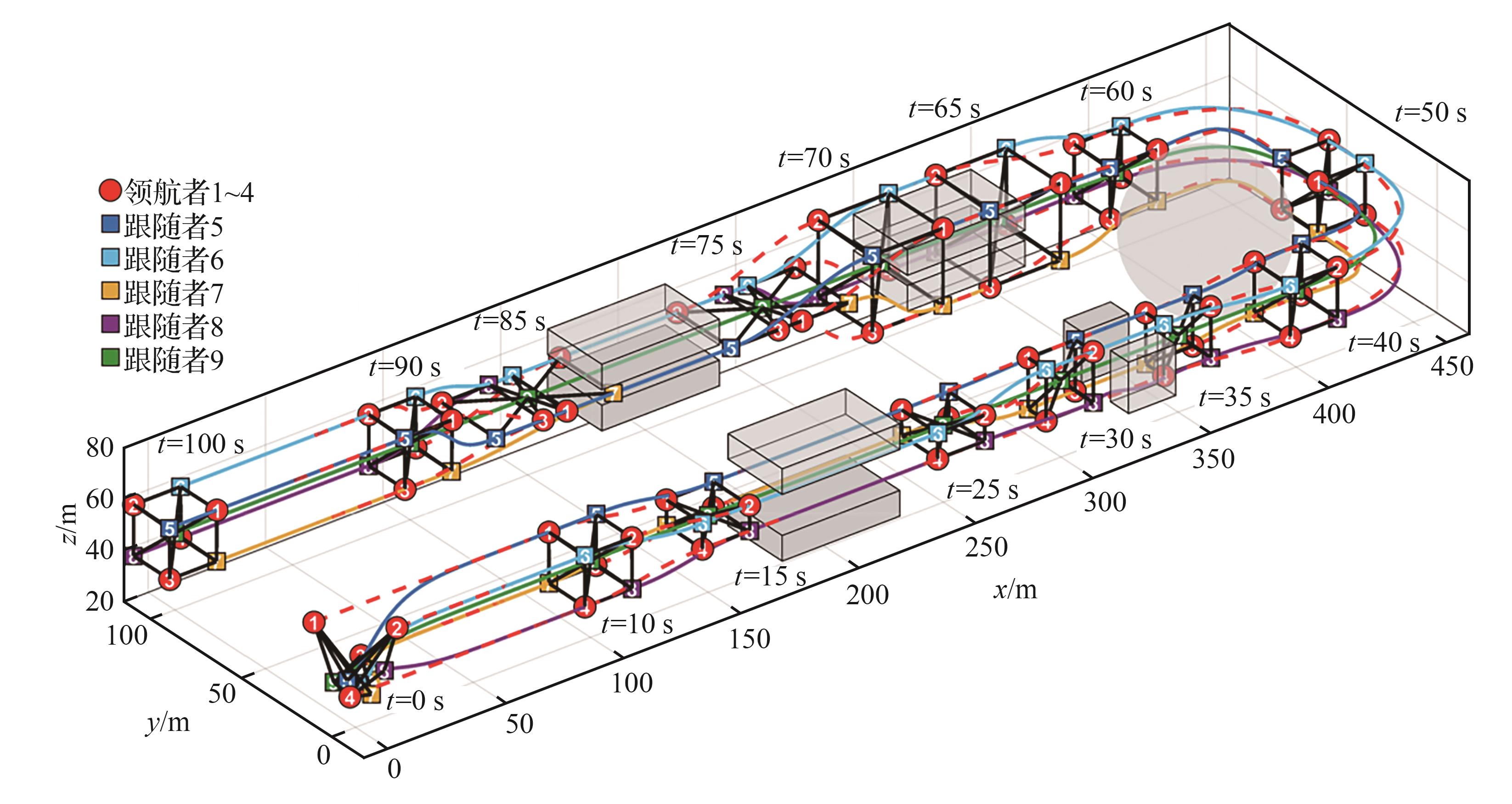
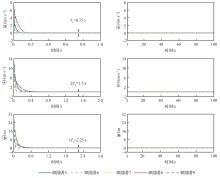
Fig.6
Variation of affine observation error with time in follower UAVs
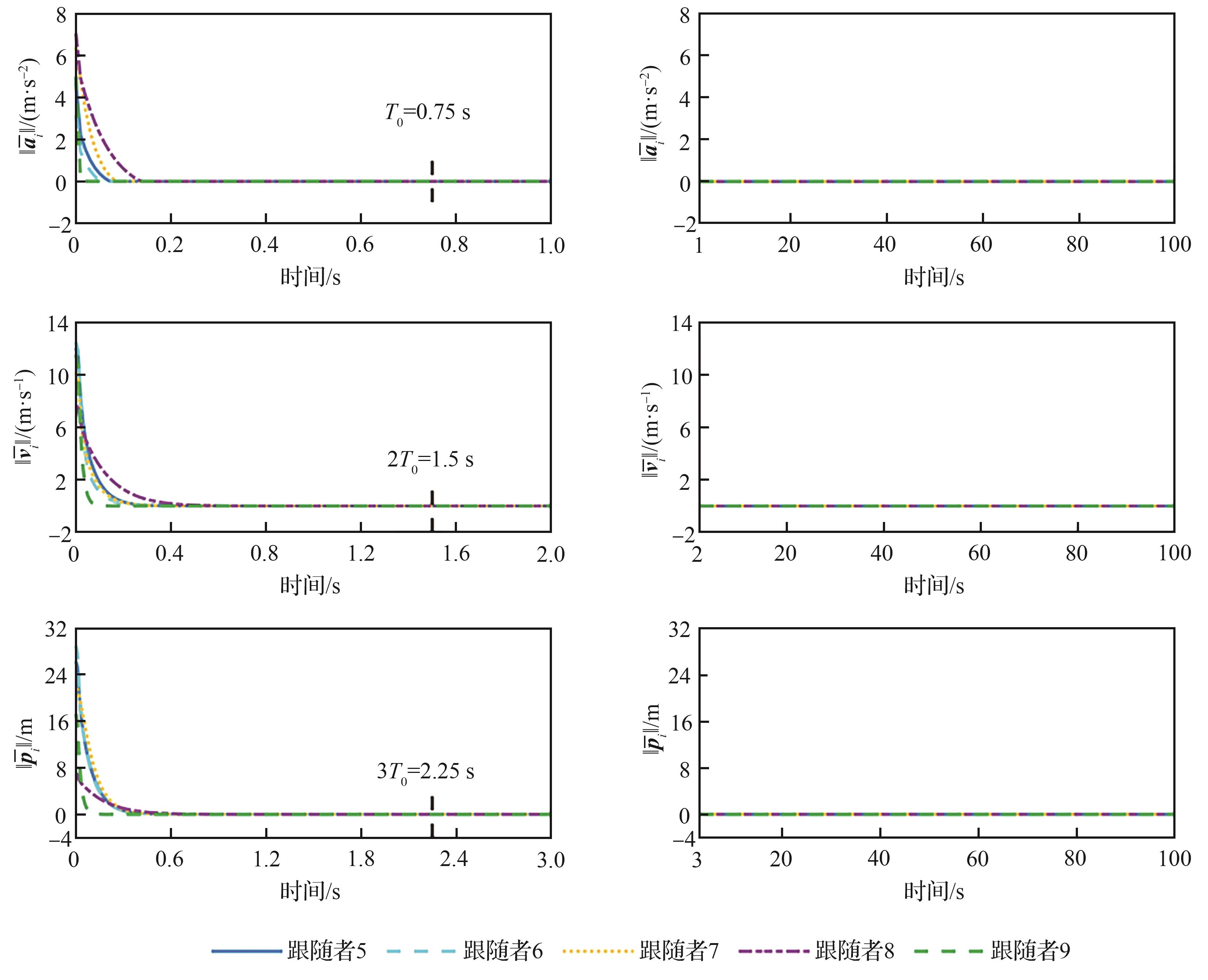

Fig.7
Variation of disturbance estimation error with time in follower UAVs
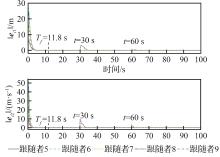
Fig.8
Variation of tracking error with time in follower UAVs
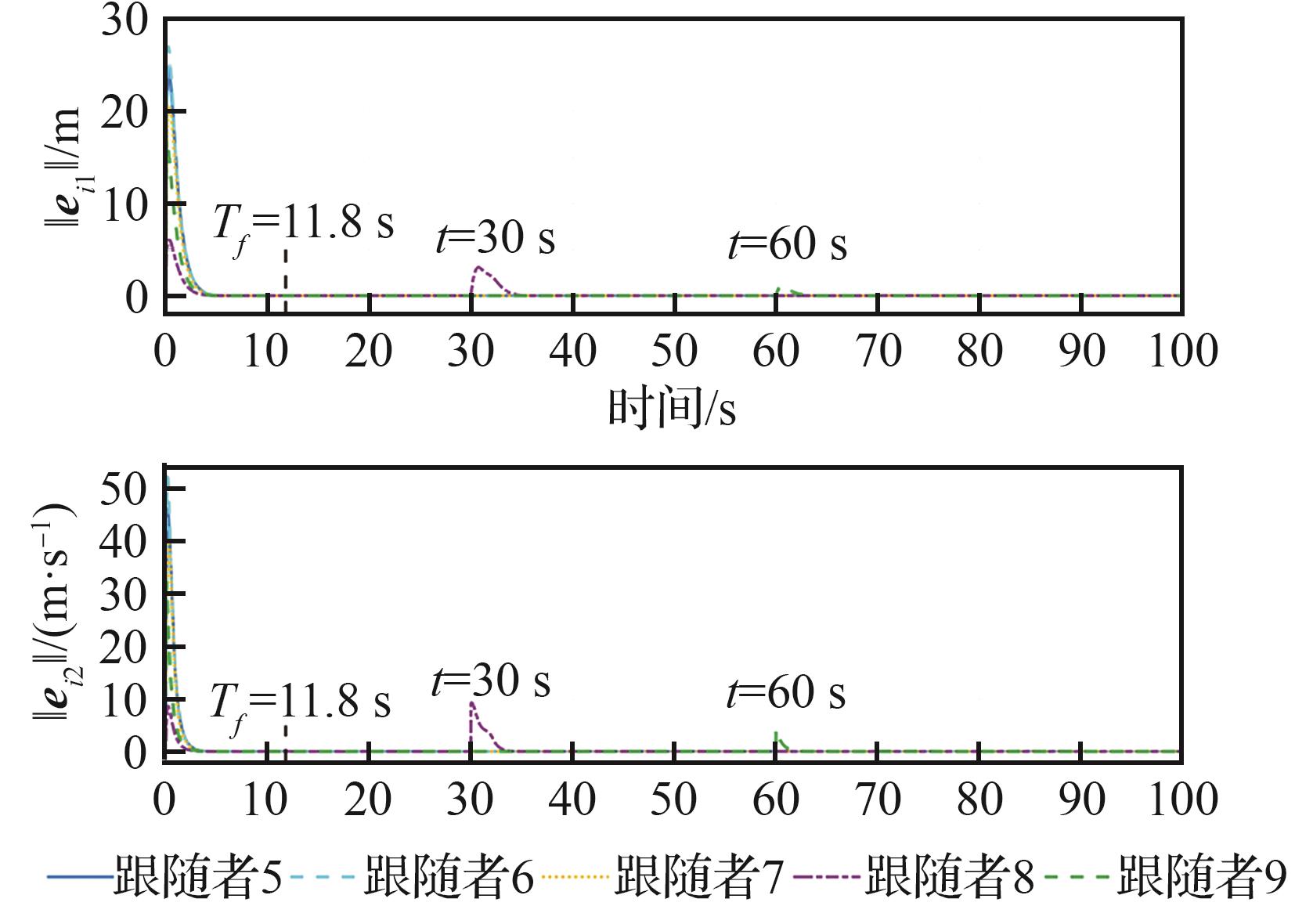
Fig.9
Variation of control input with time in follower UAVs
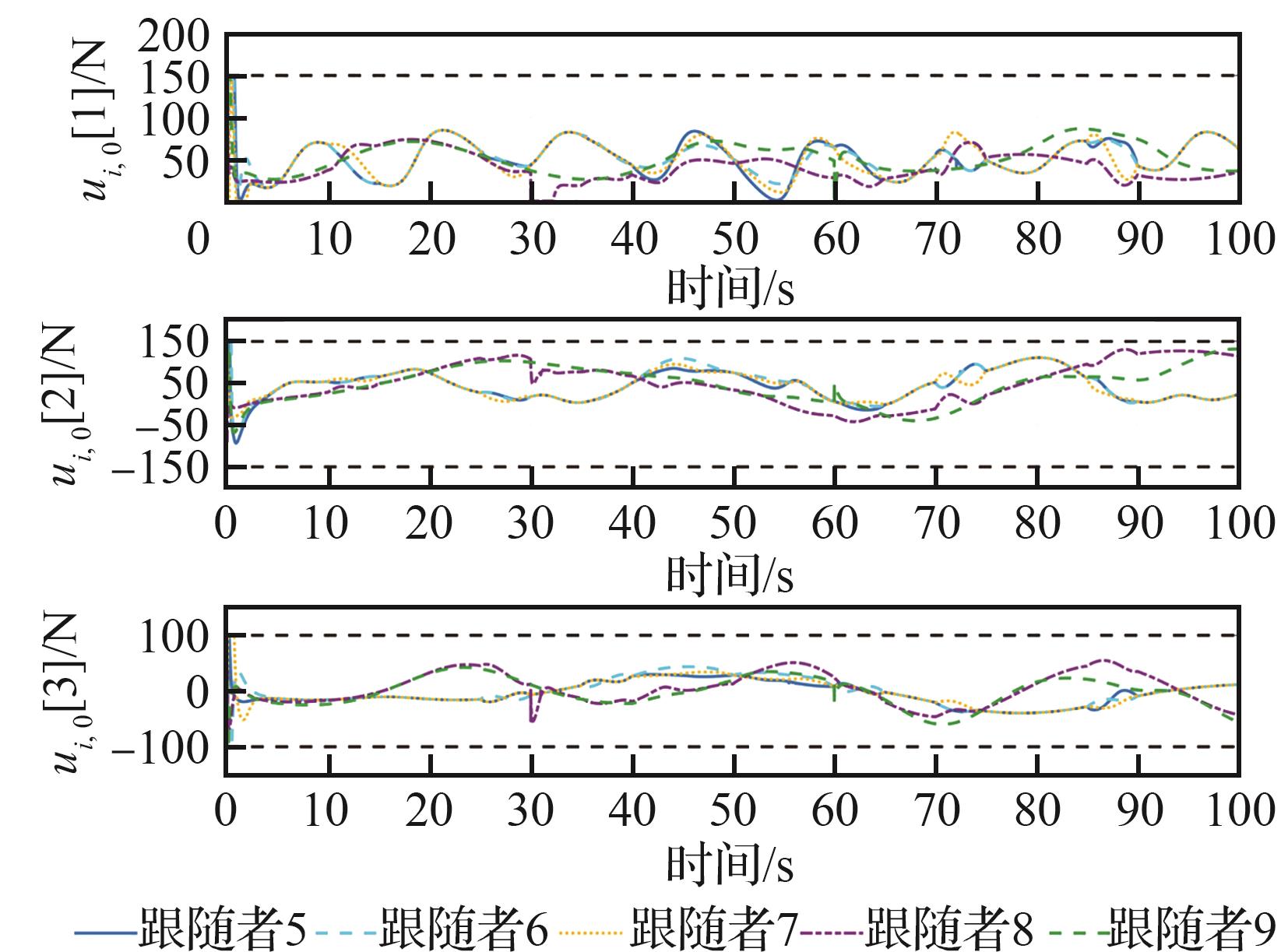

Fig.10
Observation error of Follower 7 with different observers
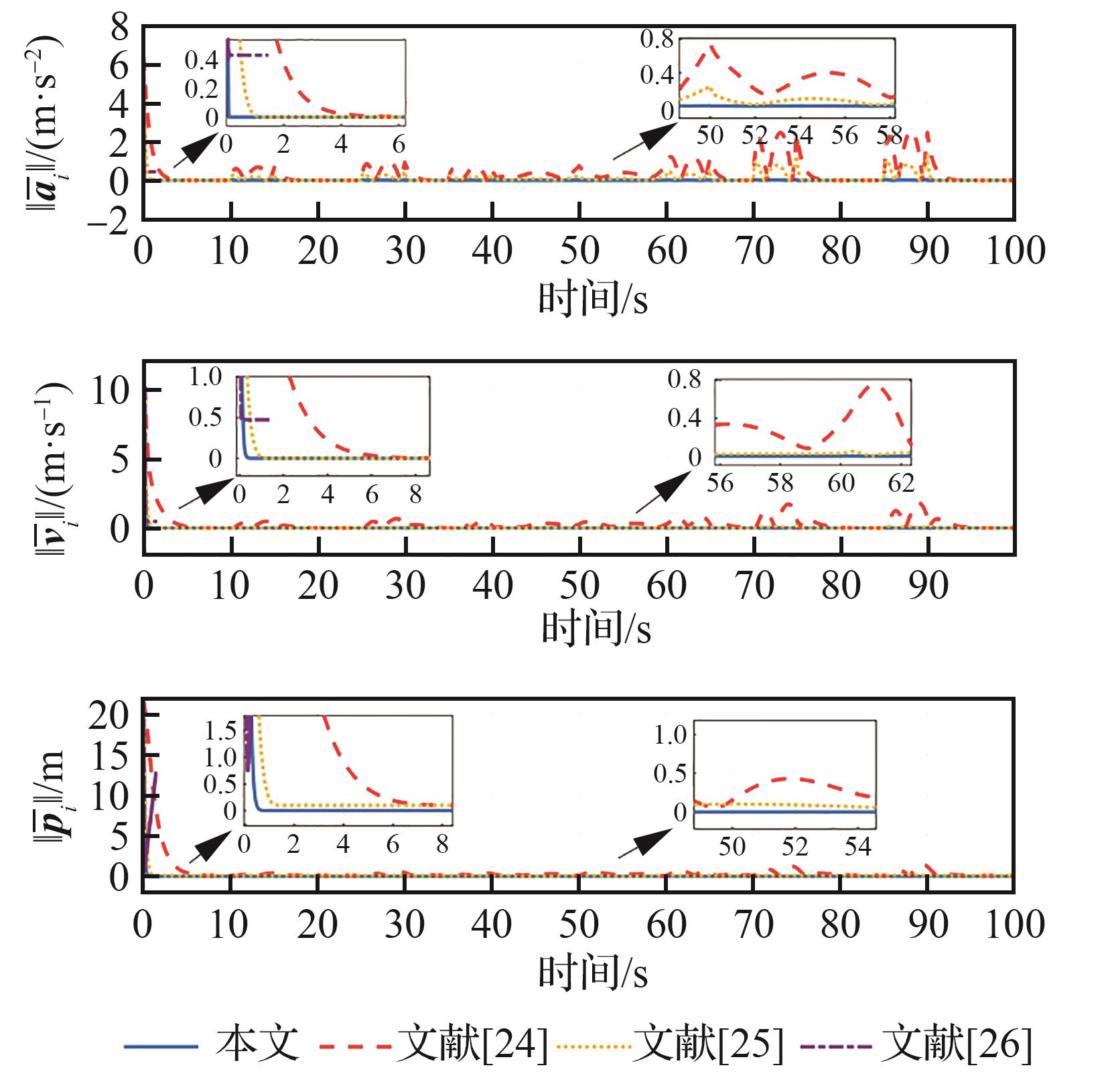
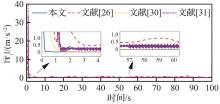
Fig.11
Disturbance estimation error of Follower 7 under different estimators
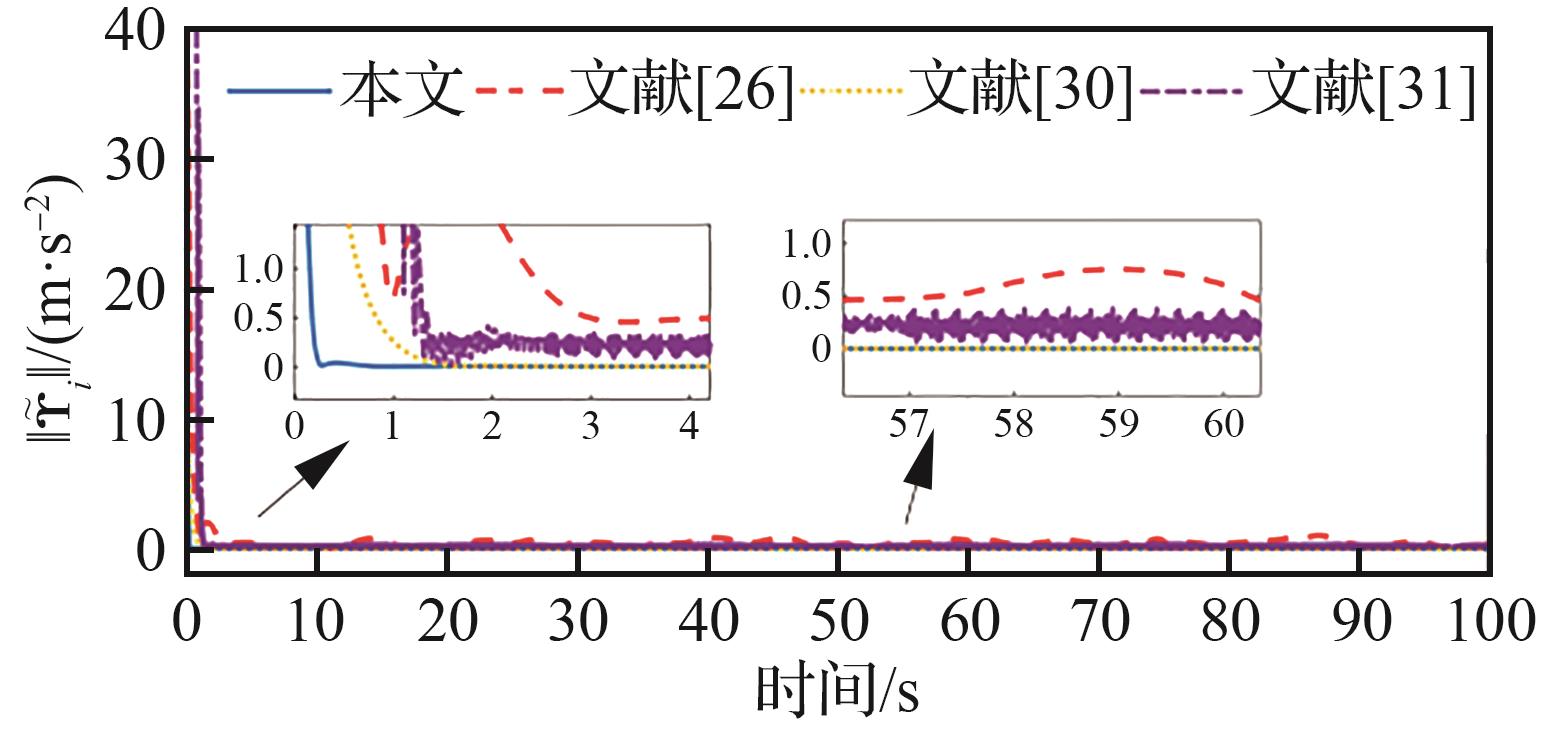
Fig.12
Position error of Follower 7 under different controllers
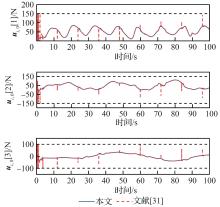
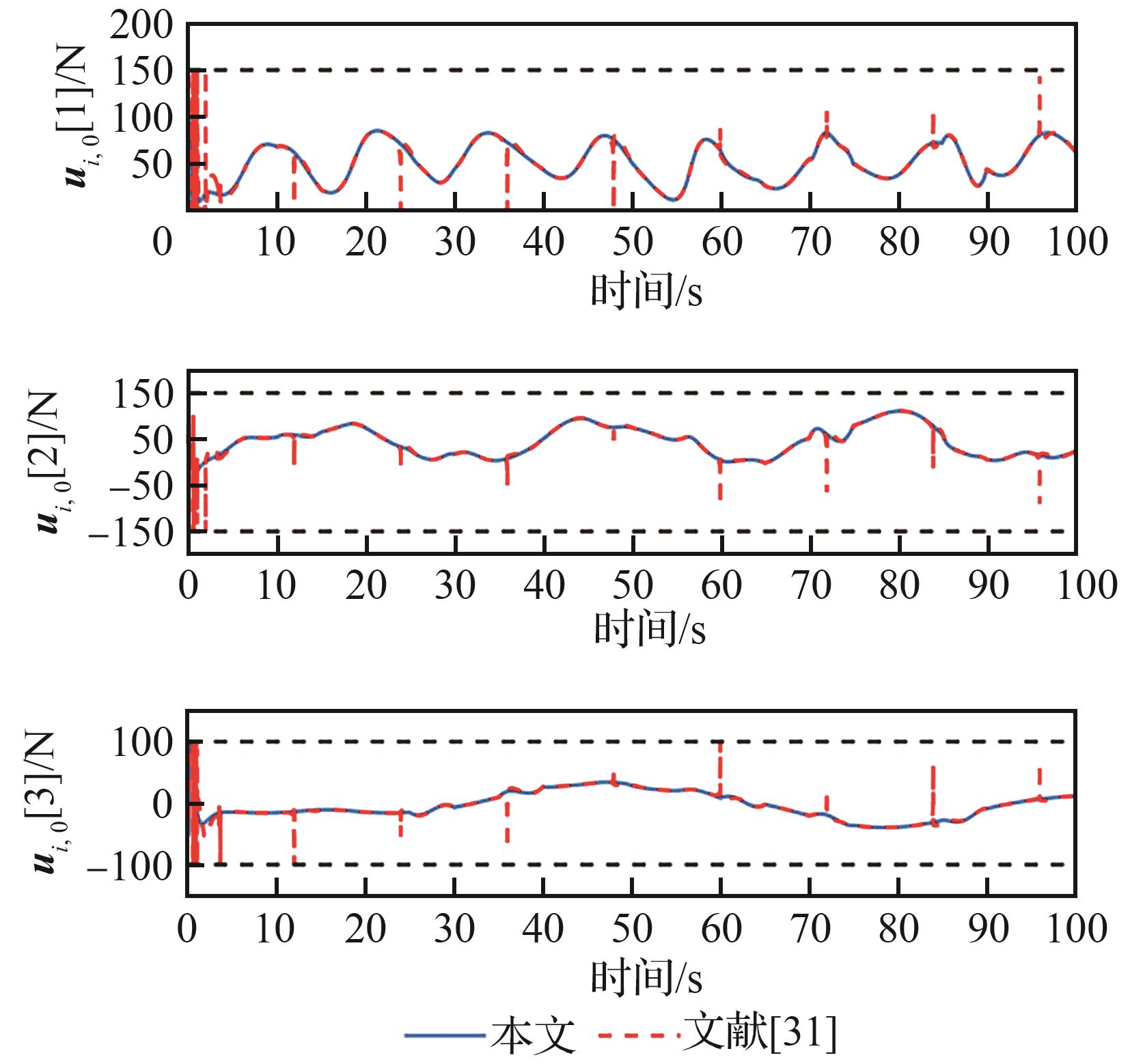
Fig.13
Control input of Follower 7 under different controllers
| [1] | 赵创新, 遆好建, 李照宏, 等. 多无人机协同编队控制及试飞验证[J]. 航空学报, 2024, 45(17): 530249. |
| ZHAO C X, TI H J, LI Z H, et al. Multi-UAV cooperative formation control and flight test verification[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530249 (in Chinese). | |
| [2] | 柳汀, 周国鑫, 徐扬, 等. 融合信息图的优化哈里斯鹰多无人机动态目标搜索[J]. 航空学报, 2024, 45(S1): 730773. |
| LIU T, ZHOU G X, XU Y, et al. Optimization of fusion information map Harris eagle multi-UAV dynamic target search[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730773 (in Chinese). | |
| [3] | 严超, 张泽旭, 袁帅, 等. GNSS拒止下面向目标监视的多无人机定位与控制方法[J]. 宇航学报, 2023, 44(10): 1534-1543. |
| YAN C, ZHANG Z X, YUAN S, et al. Multi-UAV localization and control method for target surveillance with GNSS denied[J]. Journal of Astronautics, 2023, 44(10): 1534-1543 (in Chinese). | |
| [4] | 尹洪玉, 吴宇, 梁天骄. 固定翼无人机巡逻覆盖协同路径规划方法[J]. 航空学报, 2024, 45(6): 328944. |
| YIN H Y, WU Y, LIANG T J. Cooperative path planning for patrol coverage of fixed wing UAV[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944 (in Chinese). | |
| [5] | ZHAO S Y. Affine formation maneuver control of multiagent systems[J]. IEEE Transactions on Automatic Control, 2018, 63(12): 4140-4155. |
| [6] | ZHANG Y W, LI S S, WANG S P, et al. Distributed bearing-based formation maneuver control of fixed-wing UAVs by finite-time orientation estimation[J]. Aerospace Science and Technology, 2023, 136: 108241. |
| [7] | CHEN L M, MEI J, LI C J, et al. Distributed leader-follower affine formation maneuver control for high-order multiagent systems[J]. IEEE Transactions on Automatic Control, 2020, 65(11): 4941-4948. |
| [8] | DIMAROGONAS D V, KYRIAKOPOULOS K J. A connection between formation infeasibility and velocity alignment in kinematic multi-agent systems[J]. Automatica, 2008, 44(10): 2648-2654. |
| [9] | GARCIA DE MARINA H, JAYAWARDHANA B, CAO M. Distributed rotational and translational maneuvering of rigid formations and their applications[J]. IEEE Transactions on Robotics, 2016, 32(3): 684-697. |
| [10] | ZHAO S Y, ZELAZO D. Translational and scaling formation maneuver control via a bearing-based approach[J]. IEEE Transactions on Control of Network Systems, 2017, 4(3): 429-438. |
| [11] | HAN T R, LIN Z Y, ZHENG R H, et al. A barycentric coordinate-based approach to formation control under directed and switching sensing graphs[J]. IEEE Transactions on Cybernetics, 2018, 48(4): 1202-1215. |
| [12] | LIN Z Y, WANG L L, HAN Z M, et al. Distributed formation control of multi-agent systems using complex Laplacian[J]. IEEE Transactions on Automatic Control, 2014, 59(7): 1765-1777. |
| [13] | LIN Z Y, WANG L L, CHEN Z Y, et al. Necessary and sufficient graphical conditions for affine formation control[J]. IEEE Transactions on Automatic Control, 2016, 61(10): 2877-2891. |
| [14] | XU Y, ZHAO S Y, LUO D L, et al. Affine formation maneuver control of high-order multi-agent systems over directed networks[J]. Automatica, 2020, 118: 109004. |
| [15] | LI D Y, MA G F, XU Y, et al. Layered affine formation control of networked uncertain systems: A fully distributed approach over directed graphs[J]. IEEE Transactions on Cybernetics, 2021, 51(12): 6119-6130. |
| [16] | LIN Y J, LIN Z Y, SUN Z Y, et al. A unified approach for finite-time global stabilization of affine, rigid, and translational formation[J]. IEEE Transactions on Automatic Control, 2021, 67(4): 1869-1881. |
| [17] | POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110. |
| [18] | WANG J N, DING X J, WANG C Y, et al. Affine formation control for multi-agent systems with prescribed convergence time[J]. Journal of the Franklin Institute, 2021, 358(14): 7055-7072. |
| [19] | GAO K, LIU Y F, ZHOU Y, et al. Practical fixed-time affine formation for multi-agent systems with time-based generators[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2022, 69(11): 4433-4437. |
| [20] | WANG Y J, SONG Y D, HILL D J, et al. Prescribed-time consensus and containment control of networked multiagent systems[J]. IEEE Transactions on Cybernetics, 2019, 49(4): 1138-1147. |
| [21] | DING T F, GE M F, XIONG C H, et al. Prescribed-time formation tracking of second-order multi-agent networks with directed graphs[J]. Automatica, 2023, 152: 110997. |
| [22] | NING B D, HAN Q L, ZUO Z Y. Practical fixed-time consensus for integrator-type multi-agent systems: A time base generator approach[J]. Automatica, 2019, 105: 406-414. |
| [23] | ZHAO Y, GAO K, HUANG P F, et al. Specified-time affine formation maneuver control of multiagent systems over directed networks[J]. IEEE Transactions on Automatic Control, 2024, 69(3): 1936-1943. |
| [24] | TANG C C, ZHANG H T, CAO H S, et al. Time-varying formation control of autonomous surface vehicles based on affine observer[J]. IEEE Transactions on Industrial Electronics, 2024, 71(10): 12952-12963. |
| [25] | QIN B Y, ZHANG D, TANG S, et al. Three-dimensional distributed affine formation maneuver control of fixed-wing UAV swarm with actuator faults and saturation constraints[C]∥2023 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2023) Proceedings. Singapore: Springer Nature Singapore, 2024: 1278-1296. |
| [26] | XU Y, QU Y F, LUO D L, et al. Distributed predefined-time estimator-based affine formation target-enclosing maneuver control for cooperative underactuated quadrotor UAVs with fault-tolerant capabilities[J]. Chinese Journal of Aeronautics, 2025, 38(1): 103042. |
| [27] | ZUO Z Y, LIU C J, HAN Q L, et al. Unmanned aerial vehicles: Control methods and future challenges[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(4): 601-614. |
| [28] | WU Z H, NI J K, QIAN W, et al. Composite prescribed performance control of small unmanned aerial vehicles using modified nonlinear disturbance observer[J]. ISA Transactions, 2021, 116: 30-45. |
| [29] | HUANG D Q, HUANG T P, QIN N, et al. Finite-time control for a UAV system based on finite-time disturbance observer[J]. Aerospace Science and Technology, 2022, 129: 107825. |
| [30] | LIU K, WANG R J, ZHENG S J, et al. Fixed-time disturbance observer-based robust fault-tolerant tracking control for uncertain quadrotor UAV subject to input delay[J]. Nonlinear Dynamics, 2022, 107(3): 2363-2390. |
| [31] | ZHAO S L, ZHENG J Y, YI F, et al. Exponential predefined time trajectory tracking control for fixed-wing UAV with input saturation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(5): 6406-6419. |
| [32] | 马骥, 陈向勇, 温广辉, 等. 随机切换拓扑下无人机集群预设时间跟踪控制[J]. 航空学报, 2024, 45(S1): 730793. |
| MA J, CHEN X Y, WEN G H, et al. Preset time trac control of UAV cluster unde random switching topology[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730793 (in Chinese). | |
| [33] | CHEN M, GE S S, REN B B. Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints[J]. Automatica, 2011, 47(3): 452-465. |
| [34] | HU Q L, SHAO X D, ZHANG Y M, et al. Nussbaum-type function-based attitude control of spacecraft with actuator saturation[J]. International Journal of Robust and Nonlinear Control, 2018, 28(8): 2927-2949. |
| [35] | LIU B J, GUO Y, LI A J. Nussbaum-based finite-time containment control for multi-UAVs with input saturation and velocity constraints[J]. Aerospace Science and Technology, 2023, 139: 108407. |
| [36] | LIU B J, GUO Y, LI A J, et al. Distributed nussbaum-based finite-time containment control for multi-UAVs with actuator saturation and faults[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 59(4): 3505-3520. |
| [37] | XU Y, ZHAO S Y, LUO D L, et al. Affine formation maneuver control of multi-agent systems with directed interaction graphs[C]∥2018 37th Chinese Control Conference (CCC). Piscataway: IEEE Press, 2018: 4563-4568. |
| [38] | WEN C Y, ZHOU J, LIU Z T, et al. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance[J]. IEEE Transactions on Automatic Control, 2011, 56(7): 1672-1678. |
| [39] | HU Q L, SHAO X D, GUO L. Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 331-341. |
| [40] | XIE S Z, CHEN Q. Predefined-time disturbance estimation and attitude control for rigid spacecraft[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2024, 71(4): 2089-2093. |
| [41] | WANG C L, LIN Y. Decentralized adaptive tracking control for a class of interconnected nonlinear time-varying systems[J]. Automatica, 2015, 54: 16-24. |
| [42] | ARAKI M, KONDO B. Stability and transient behavior of composite nonlinear systems[J]. IEEE Transactions on Automatic Control, 1972, 17(4): 537-541. |
| [1] | Jianjian LIANG, Shoukun WANG, Shaoming HE. Segmented action guidance strategy for autonomous shipborne landing of fixed-wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531116-531116. |
| [2] | Yu LI, Tongwen CHEN, Zhigang WANG, Chiyung WEN, Xiaoxiong LIU. Incremental control of direct lift landing based on predefined-time theory [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531163-531163. |
| [3] | Yifeng WANG, Yiming PENG, Long LI, Xiaohui WEI, Hong NIE. DQN-based active arrest and recovery technique for UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 231448-231448. |
| [4] | Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944-328944. |
| [5] | Jiayu HAO, Yiming PENG, Xiaohui WEI, Hui MA. Design and analysis of active control arresting device based on MR technology [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 428818-428818. |
| [6] | Bojian LIU, Aijun LI, Yong GUO, Changqing WANG. Fault-tolerant containment control for precise formation of UAVs with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327414-327414. |
| [7] | Shihao XU, Yingzi GUAN, Jialun PU, Changzhu WEI. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326857-326857. |
| [8] | Yong XU, Hongtao YAN, Tao JIA, Yue MA, Zehua DENG, Duoneng LIU. Aerial simulation docking technology of fixed-wing clustering UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 326539-326539. |
| [9] | Hongzhu ZHANG, Dong YE, Zhaowei SUN. Predefined-time integrated pose control for spacecraft under input quantization [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(22): 328558-328558. |
| [10] | Haolan CHEN, Peng WANG, Guojian TANG. Attitude control scheme for morphing vehicles with output error constraints and input saturation [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528762-528762. |
| [11] | Chuang XU, Baolin WU. Distributed fixed-time output-feedback attitude consensus control for multiple spacecraft with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327465-327465. |
| [12] | ZHOU Wei, MA Peiyang, GUO Zheng, WANG Daoping, ZHOU Ruisun. Research of combined fixed-wing UAV based on wingtip chained [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325946-325946. |
| [13] | XIANG Xiaojia, YAN Chao, WANG Chang, YIN Dong. Coordination control method for fixed-wing UAV formation through deep reinforcement learning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524009-524009. |
| [14] | LU Yao. Backstepping control for hypersonic flight vehicles based on tracking differentiator [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524737-524737. |
| [15] | ZHANG Chaofan, DONG Qi. Adaptive-gain sliding mode control for fixed-wing UAVs with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723755-723755. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341