Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (18): 231876.doi: 10.7527/S1000-6893.2025.31876
• Solid Mechanics and Vehicle Conceptual Design • Previous Articles Next Articles
Xunliang YAN1,2, Yuxuan YANG1,2( ), Jiawei SHI3, Peichen WANG1,2
), Jiawei SHI3, Peichen WANG1,2
Received:2025-02-17
Revised:2025-03-04
Accepted:2025-03-27
Online:2025-09-25
Published:2025-03-31
Contact:
Yuxuan YANG
E-mail:yuxuanyang@mail.nwpu.edu.cn
Supported by:CLC Number:
Xunliang YAN, Yuxuan YANG, Jiawei SHI, Peichen WANG. Rapid ascent-phase trajectory planning for near-optimal fuel consumption of RBCC vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 231876.
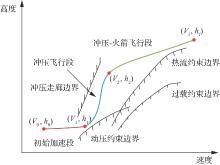
Fig.1
Schematic diagram of flight process
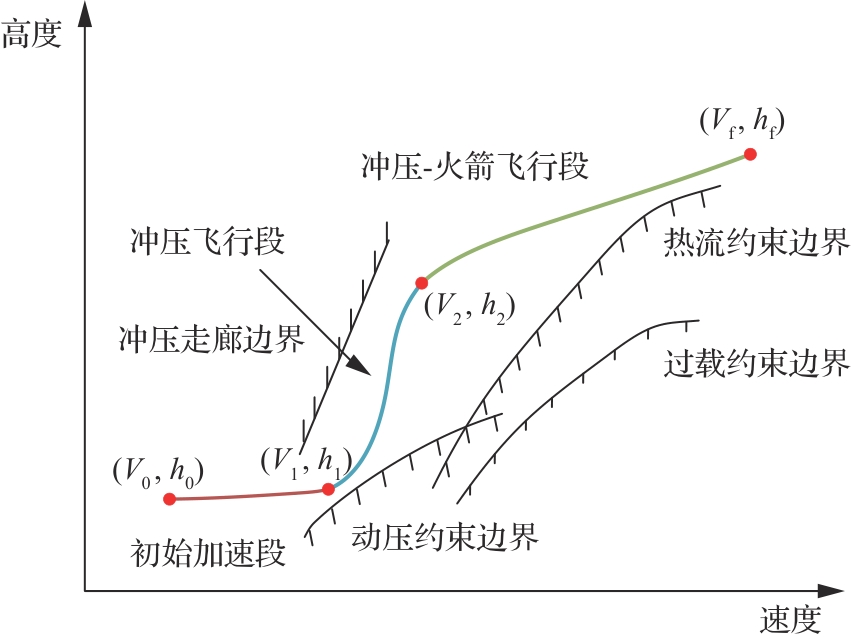
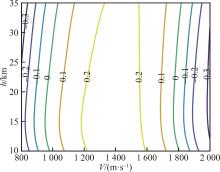
Fig.2
Contours of S(V,h,α) value in case of α=0°
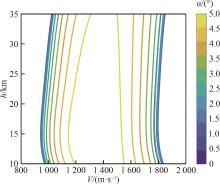
Fig.3
S(V,h,α)=0 curves at different angles of attack
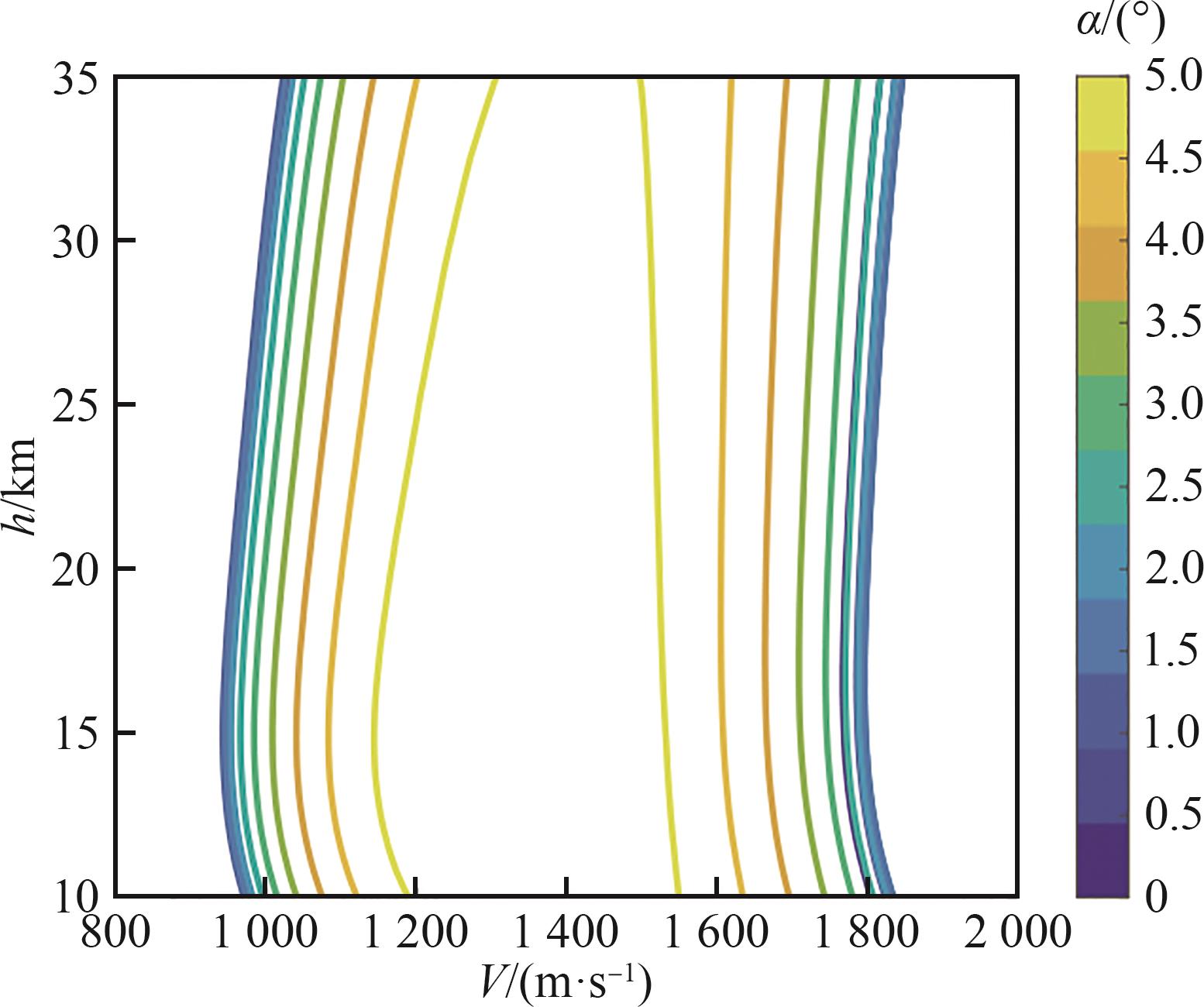
Fig.4
Profile diagram after h2 increases to h¯2
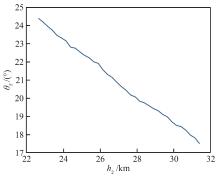
Fig.5
Dependence between h2 and θf
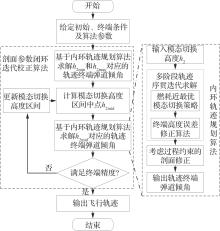
Fig.6
Flowchart of trajectory planning algorithm
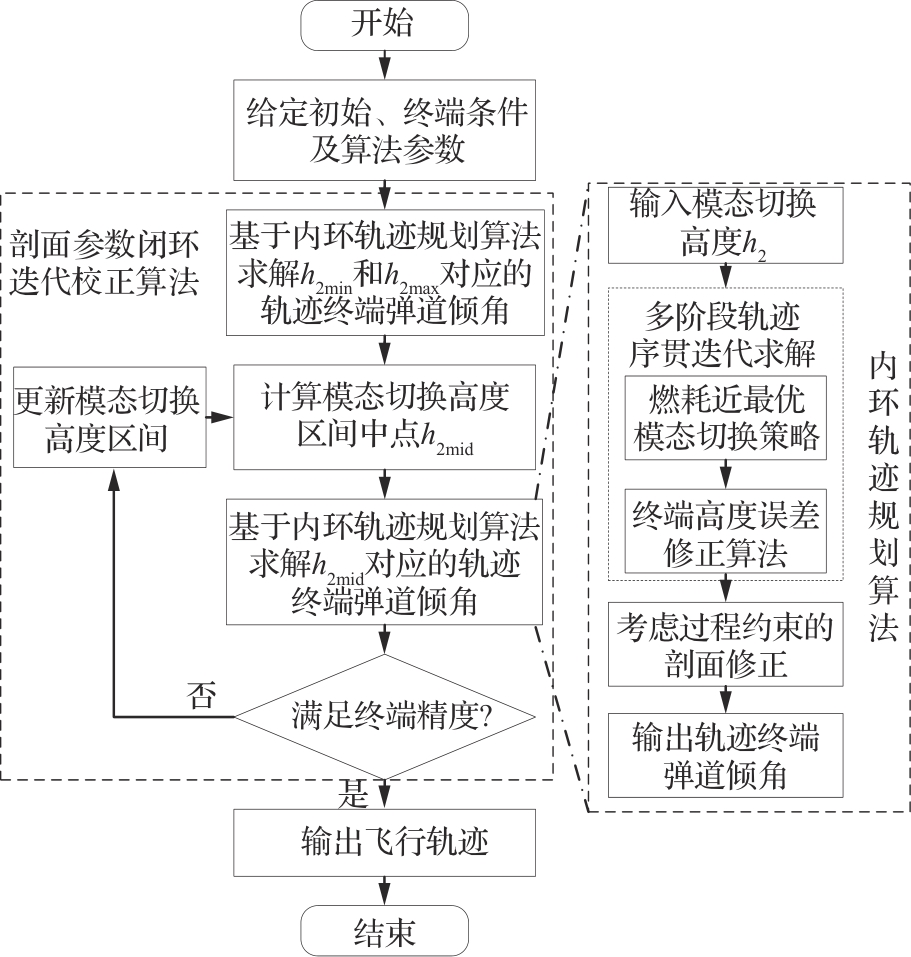
Table 1
Simulation results of algorithm module functionality
| 方法 | 1 | 2 | 3 |
|---|---|---|---|
| 49.999 6 | 49.999 7 | 50.000 5 | |
| 11.001 9 | 11.002 2 | 11.002 3 | |
| 24.939 5 | 24.523 0 | 24.616 0 | |
| 求解耗时/s | 0.99 | 0.18 | 0.17 |
| 最大动压/kPa | 174.24 | 185.68 | 185.68 |
| 最大热流密度/(kW·m-2) | 795.64 | 794.98 | 826.73 |
| 最大过载 | 5.67 | 6.11 | 5.17 |
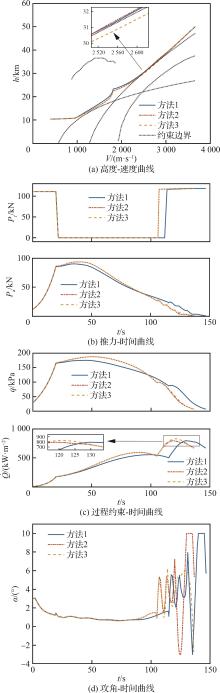
Fig.7
Simulation results of algorithm module functionality
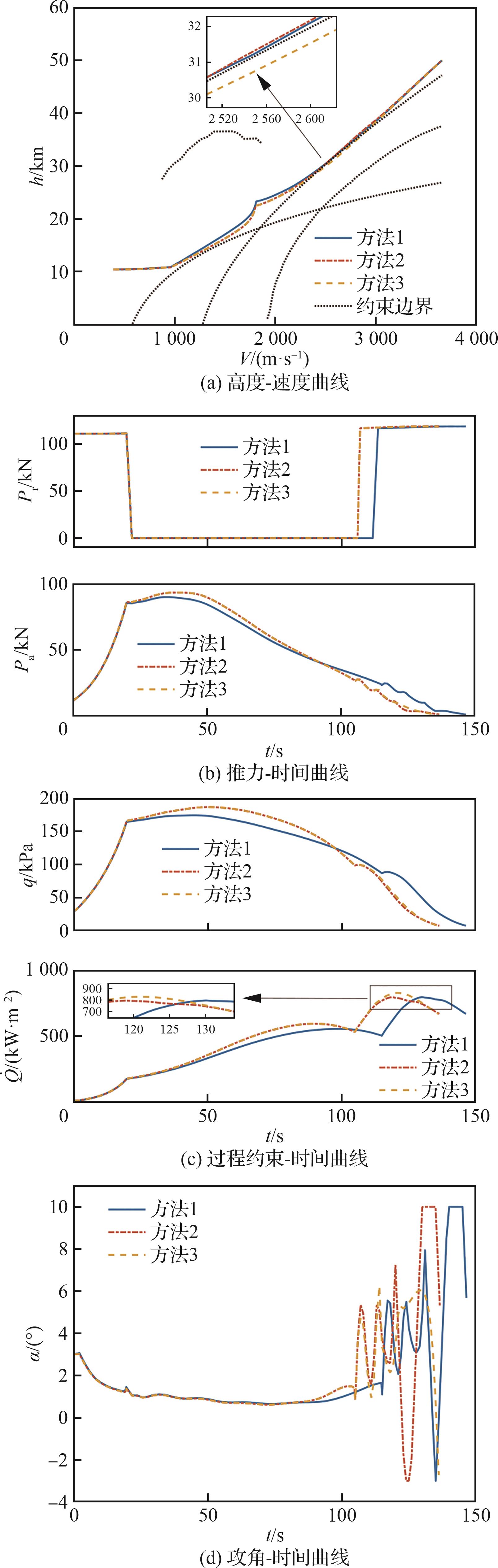
Table 2
Comparison of simulation results
| 方法 | 本文方法 | 粒子群方法 | hp自适应伪谱法 | 序列凸优化方法 | 传统剖面方法[ |
|---|---|---|---|---|---|
| 终端高度/km | 50.000 3 | 49.962 2 | 49.998 9 | 50.038 2 | 48.700 9 |
| 终端弹道倾角/(°) | 20.025 6 | 19.905 9 | 19.996 1 | 20.103 1 | 20.136 6 |
| 最大动压/kPa | 186.86 | 171.52 | 200.05 | 200.36 | 199.28 |
| 最大热流密度/(kW·m-2) | 673.69 | 675.50 | 675.53 | 671.97 | 726.81 |
| 最大过载 | 2.87 | 3.42 | 2.61 | 2.55 | 2.84 |
| 燃料消耗/kg | 2 745.71 | 2 736.98 | 2 711.62 | 2 711.94 | 2 795.96 |
| 求解耗时/s | 0.645 4 | 174.647 1 | 9.823 2 | 8.079 0 | 0.058 7 |

Fig.8
Results curves of comparison simulation
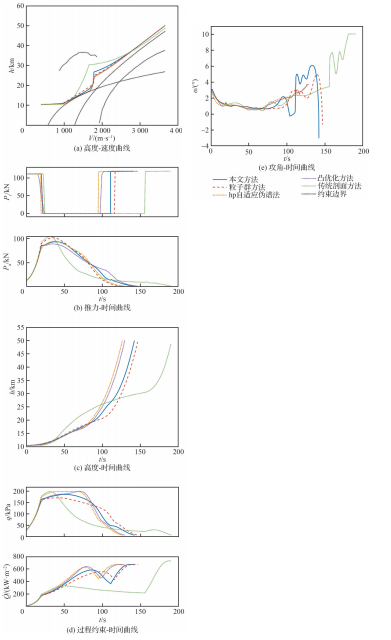
Table 3
Parameter setting for multi-task adaptability simulation
| 算例 | |||
|---|---|---|---|
| 1 | 50 | 11 | 23 |
| 2 | 50 | 11 | 17 |
| 3 | 54 | 11 | 23 |
| 4 | 50 | 10 | 23 |
Table 4
Terminal deviation corresponding to different task conditions
| 算例 | |||
|---|---|---|---|
| 1 | 0.489 4 | 0.002 4 | 0.095 5 |
| 2 | 0.641 2 | 0.001 8 | 0.006 9 |
| 3 | 0.876 9 | 0.001 7 | 0.003 8 |
| 4 | 0.449 9 | 0.001 4 | 0.015 4 |
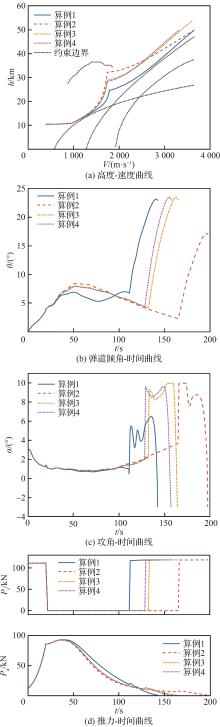
Fig.9
Results curves of multi-task adaptability simulation
Table 5
Parameter setting for Monte Carlo simulation
| 参数 | 参数 | ||
|---|---|---|---|
| 300 | 300 | ||
| 50 | 50 | ||
| 0.2 | 0.2 |
Table 6
Statistical result of terminal deviation in Monte Carlo simulation
| 参数 | |||
|---|---|---|---|
| 平均值 | 0.005 0 | 0.001 5 | 0.001 2 |
| 标准差 | 0.542 8 | 0.000 5 | 0.055 9 |

Fig.10
Results of Monte Carlo simulation
| [1] | 侯晓. 组合循环发动机技术研究进展[J]. 航空学报, 2023, 44(21): 529824. |
| HOU X. Research progress in combined cycle engines[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 529824 (in Chinese). | |
| [2] | 秦飞, 赵征, 何国强, 等. 火箭基组合循环发动机热结构技术研究进展[J]. 航空学报, 2024, 45(11): 529572. |
| QIN F, ZHAO Z, HE G Q, et al. Thermal structure technology development of rocket based combined cycle engine[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(11): 529572 (in Chinese). | |
| [3] | 闫循良, 王舒眉, 王培臣, 等. RBCC高超声速飞行器上升段轨迹快速优化[J]. 西北工业大学学报, 2023, 41(6): 1064-1072. |
| YAN X L, WANG S M, WANG P C, et al. Rapid ascent trajectory optimization of rocket-based combined cycle hypersonic vehicle[J]. Journal of Northwestern Polytechnical University, 2023, 41(6): 1064-1072 (in Chinese). | |
| [4] | LU P. Introducing computational guidance and control[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(2): 193. |
| [5] | MURILLO O, LU P. Fast ascent trajectory optimization for hypersonic air-breathing vehicles[C]∥AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010. |
| [6] | ZHOU H Y, WANG X G, BAI Y L, et al. Ascent phase trajectory optimization for vehicle with multi-combined cycle engine based on improved particle swarm optimization[J]. Acta Astronautica, 2017, 140: 156-165. |
| [7] | 周宏宇, 王小刚, 赵亚丽, 等. 组合动力运载器上升段轨迹智能优化方法[J]. 宇航学报, 2020, 41(1): 61-70. |
| ZHOU H Y, WANG X G, ZHAO Y L, et al. Ascent trajectory optimization for a multi-combined-cycle-based launch vehicle using a hybrid heuristic algorithm[J]. Journal of Astronautics, 2020, 41(1): 61-70 (in Chinese). | |
| [8] | JIA Y C, YE W, CUI P, et al. Climbing performance analysis of rocket-based combined cycle engine powered aircraft[J]. Acta Astronautica, 2019, 162: 135-144. |
| [9] | ZHENG J L, CHANG J T, YANG S B, et al. Trajectory optimization for a TBCC-powered supersonic vehicle with transition thrust pinch[J]. Aerospace Science and Technology, 2019, 84: 214-222. |
| [10] | YANG S B, CUI T, HAO X Y, et al. Trajectory optimization for a ramjet-powered vehicle in ascent phase via the Gauss pseudospectral method[J]. Aerospace Science and Technology, 2017, 67: 88-95. |
| [11] | GUO J G, LIANG L C, GUO Z Y. Combined-cycle propulsion-involved trajectory optimization and performance-driven attitude control for aerospace plane during the ascent phase[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(12): 21086-21096. |
| [12] | 闫循良, 王培臣, 王舒眉, 等. 基于混沌多项式的RBCC飞行器上升段鲁棒轨迹快速优化[J]. 航空学报, 2023, 44(21): 528349. |
| YAN X L, WANG P C, WANG S M, et al. Rapid robust trajectory optimization for RBCC vehicle ascent based on polynomial chaos[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 528349 (in Chinese). | |
| [13] | 吕翔, 何国强, 刘佩进. RBCC飞行器爬升段轨迹设计方法[J]. 航空学报, 2010, 31(7): 1331-1337. |
| LU X, HE G Q, LIU P J. Ascent trajectory design method for RBCC-powered vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(7): 1331-1337 (in Chinese). | |
| [14] | ZHANG T T, WANG Z G, HUANG W, et al. An analysis tool of the rocket-based combined cycle engine and its application in the two-stage-to-orbit mission[J]. Energy, 2020, 193: 116709. |
| [15] | 陈婷婷, 孙春贞. RBCC飞行器上升段飞行走廊规划方法[J]. 兵工自动化, 2019, 38(12): 50-53. |
| CHEN T T, SUN C Z. Flight corridor planning method of RBCC ascent[J]. Ordnance Industry Automation, 2019, 38(12): 50-53 (in Chinese). | |
| [16] | 贾晓娟, 闫晓东. 吸气式组合动力飞行器爬升轨迹设计方法研究[J]. 西北工业大学学报, 2015, 33(1): 104-109. |
| JIA X J, YAN X D. Ascent trajectory design method for air-breathing powered propulsion system[J]. Journal of Northwestern Polytechnical University, 2015, 33(1): 104-109 (in Chinese). | |
| [17] | 唐湘佶. 组合动力飞行器快速轨迹规划与跟踪制导方法研究[D]. 长沙: 国防科技大学, 2021. |
| TANG X J. Study on fast trajectory planning and tracking guidance for vehicles with combined cycle engines[D]. Changsha: National University of Defense Technology, 2021 (in Chinese). | |
| [18] | 李栩进. 预冷组合动力飞行器轨迹规划与制导方法研究[D]. 北京: 中国运载火箭技术研究院, 2022. |
| LI X J. Research on trajectory planning and guidance method of pre-cooled combined cycle power vehicle[D]. Beijing:China Academy of Launch Vehicle Technology, 2022 (in Chinese). | |
| [19] | GAO Y, SHAO Z J, SONG Z Y. Enhanced successive convexification based on error-feedback index and line search filter[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(12): 2243-2257. |
| [20] | WANG Z B. A survey on convex optimization for guidance and control of vehicular systems[J]. Annual Reviews in Control, 2024, 57: 100957. |
| [21] | CORBAN J E, CALISE A J, FLANDRO G A. Rapid near-optimal aerospace plane trajectory generation and guidance[J]. Journal of Guidance, Control, and Dynamics, 1991, 14(6): 1181-1190. |
| [22] | CHOU H C. Energy methods for hypersonic trajectory optimization [D]. Santa Clara: Santa Clara University, 1997. |
| [23] | 南汶江, 闫循良, 杨宇轩, 等. 考虑时间约束的纵侧向综合调控再入滑翔轨迹快速规划[J]. 兵工学报, 2025, 46(3): 68-80. |
| NAN W J, YAN X L, YANG Y X, et al. Rapid planning of longitudinal-lateral comprehensive control reentry gliding trajectory considering time constraints[J]. Acta Armamentarii, 2025, 46(3): 68-80 (in Chinese). |
| [1] | . Solar-sail spacecraft asymmetric resonant Halo orbits design and analysis [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 1-0. |
| [2] | . Review of integral correction methods for orbit calculation [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 1-0. |
| [3] | Xunliang YAN, Peichen WANG, Yang GUO. Review of trajectory planning and guidance methods for entry glide maneuvering penetration [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331810-331810. |
| [4] | Cong XIE, Zhen YANG, Yangang LIANG. Homotopic perturbed lambert algorithm based on A* algorithm [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330780-330780. |
| [5] | Shiyu AN, Ming LIU, Huayi LI, Fan WU. Design and applications of novel periodic orbits with solar sail in Earth-Moon system [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 230828-230828. |
| [6] | Zhaohang LI, Changxuan WEN, Dong QIAO, Bo PANG. Geometrical solution of multi-pursuer/one-evader orbital pursuit-evasion game based on reachable set theory [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730803-730803. |
| [7] | Peichen WANG, Xunliang YAN, Xinguo LI, Zian WANG. Reentry glide analytical guidance considering time constraints [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(23): 329844-329844. |
| [8] | Haiyue AO, Chihang YANG, Yu SHI, Hao ZHANG. Stationkeeping strategies for close formation flight on distant retrograde orbits [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(22): 330306-330306. |
| [9] | Zhanfeng MENG. Design of sun-synchronous and repeating tracking condition elliptical lunar frozen orbits [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(18): 229926-229926. |
| [10] | Qian CAO, Huayi LI. Fully-coupled dynamics for plate-type satellite based on geometric mechanics [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 229786-229786. |
| [11] | Guanghan XIAO, Zeyan HU, Junhu LIU, Liang WANG, Qingtang MAO. A design method of even-fold continuous-coverage constellation for space targets [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 229637-229637. |
| [12] | Meng Zhan-Feng. Design of Sun-Synchronous Repeat Tracking Condition Frozen Elliptical Lunar Orbits [J]. Acta Aeronautica et Astronautica Sinica, 0, (): 0-0. |
| [13] | Yu XU, Zhengguang HE, Pengfei XUE, Wanchun CHEN, Feng CHEN. Trajectory design and guidance for high speed flight vehicle based on thermal response characteristics [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(22): 328553-328553. |
| [14] | Xunliang YAN, Peichen WANG, Shumei WANG, Yuxuan YANG, Kuan WANG. Rapid robust trajectory optimization for RBCC vehicle ascent based on polynomial chaos [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(21): 528349-528349. |
| [15] | Zhe LIU, Xige ZHANG, Changzhu WEI, Naigang CUI. High-precision adaptive convex programming for reentry trajectories of suborbital vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729430-729430. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341