Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (11): 531369.doi: 10.7527/S1000-6893.2024.31369
• Articles • Previous Articles
Junzhi LI1,2, Teng LONG1,2,3,4, Jingliang SUN1,2,3( ), Hongyu MIAO1,2, Zhenlin ZHOU1,2
), Hongyu MIAO1,2, Zhenlin ZHOU1,2
Received:2024-10-09
Revised:2024-11-05
Accepted:2024-12-06
Online:2024-12-18
Published:2024-12-18
Contact:
Jingliang SUN
E-mail:sunjingliangac@163.com
Supported by:CLC Number:
Junzhi LI, Teng LONG, Jingliang SUN, Hongyu MIAO, Zhenlin ZHOU. Differential flatness-based spatial-temporal hierarchical trajectory planning for fixed-wing UAVs in urban environments[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531369.
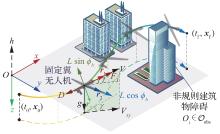
Fig.1
Trajectory planning for UAVs in urban environments
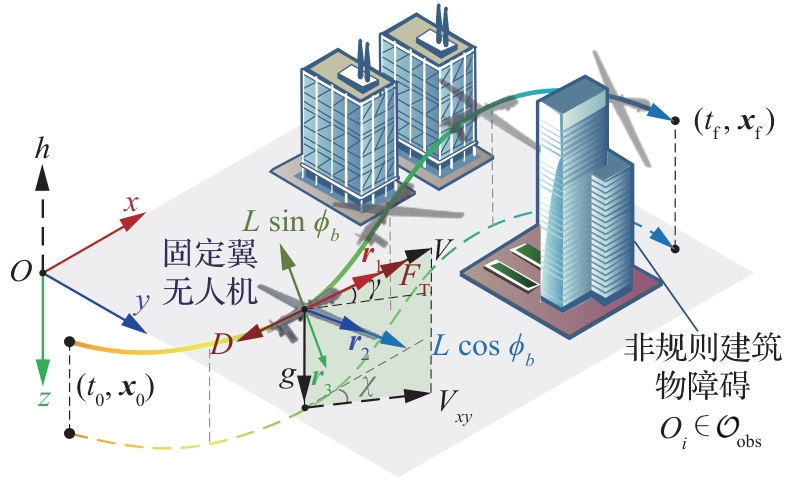
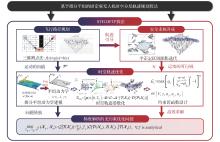
Fig.2
Framework of STH-DFTP algorithm
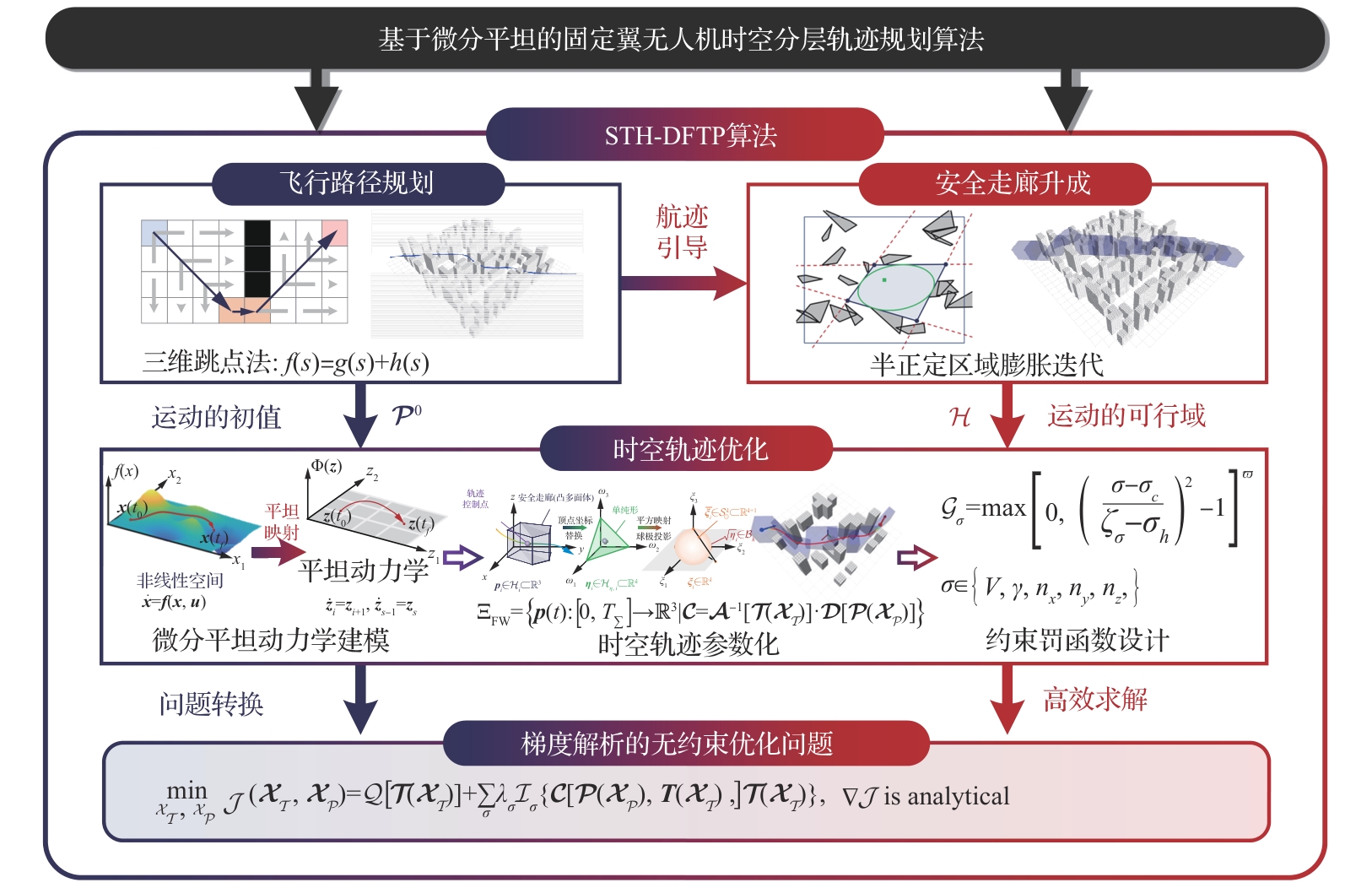

Fig.3
Flowchat of initial motion and feasible region generation
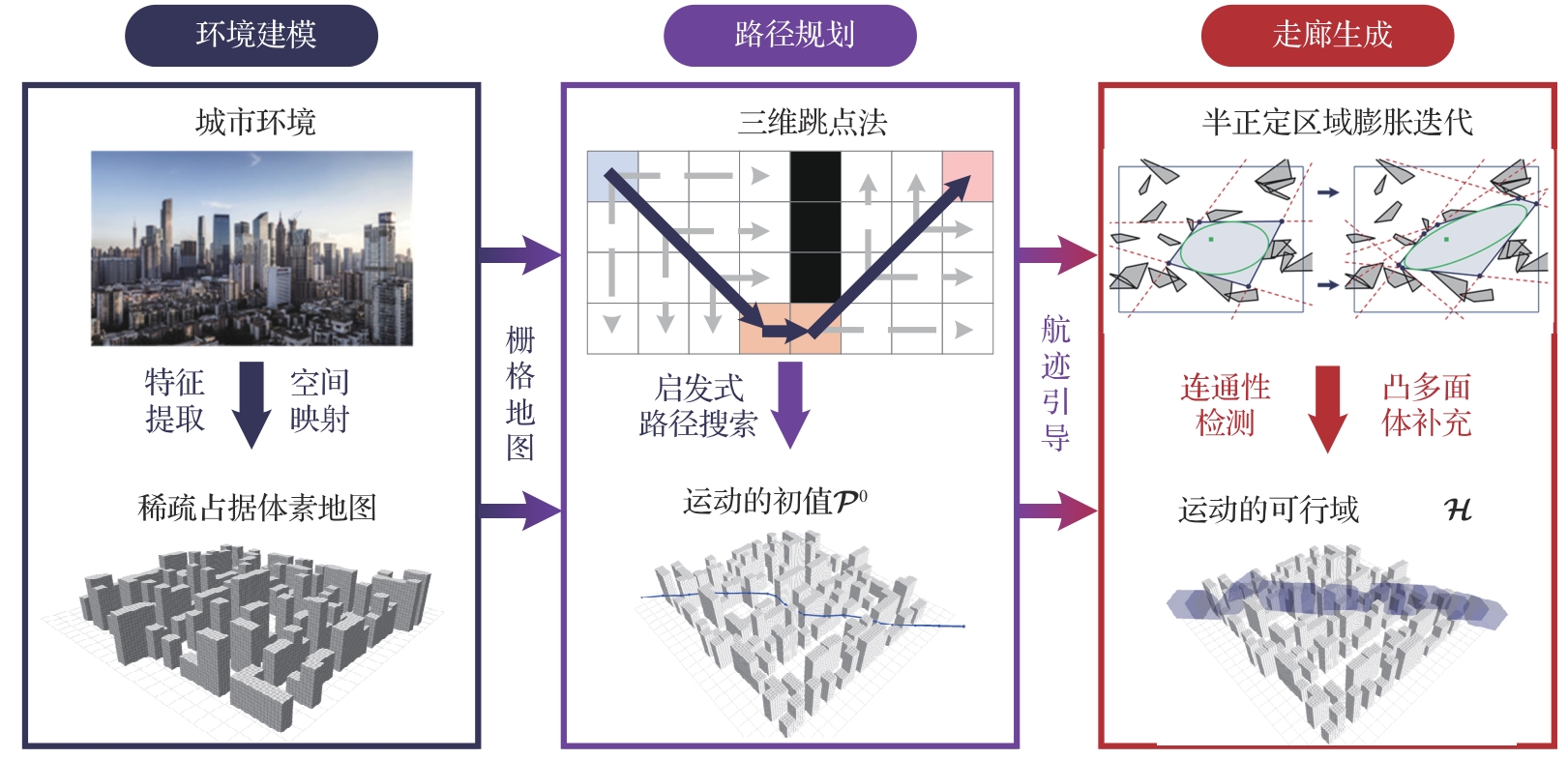

Fig.4
Diagram of iterative regional inflation algorithm
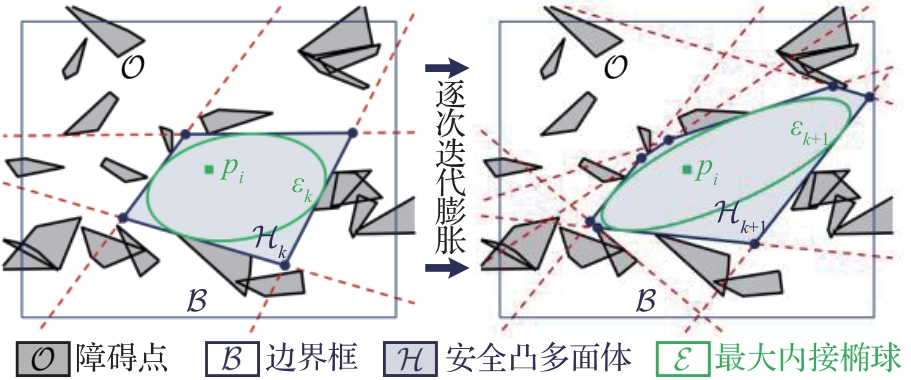

Fig.5
Diagram of spatial variables replacement
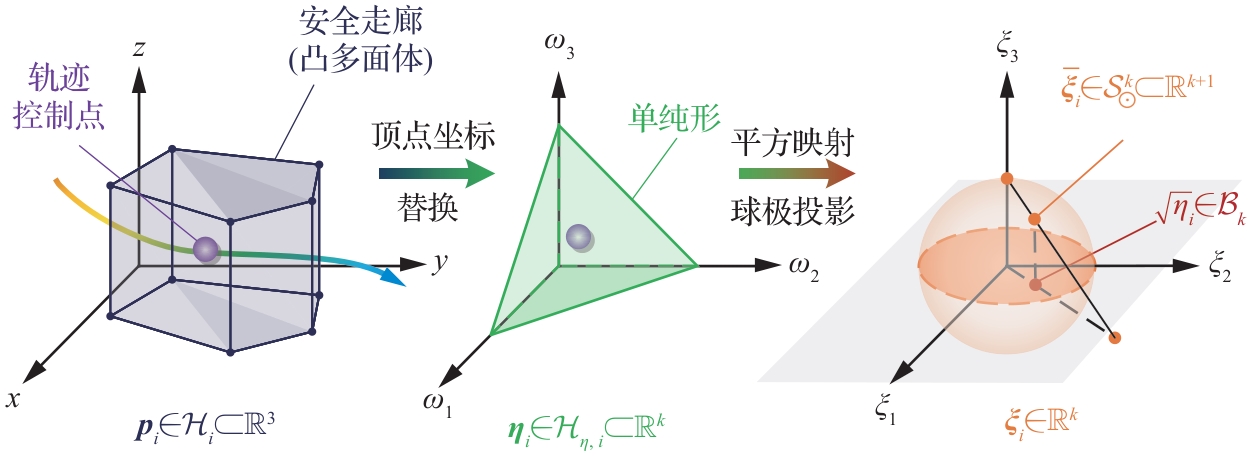

Fig.6
Flowchart of STH-DFTP algorithm
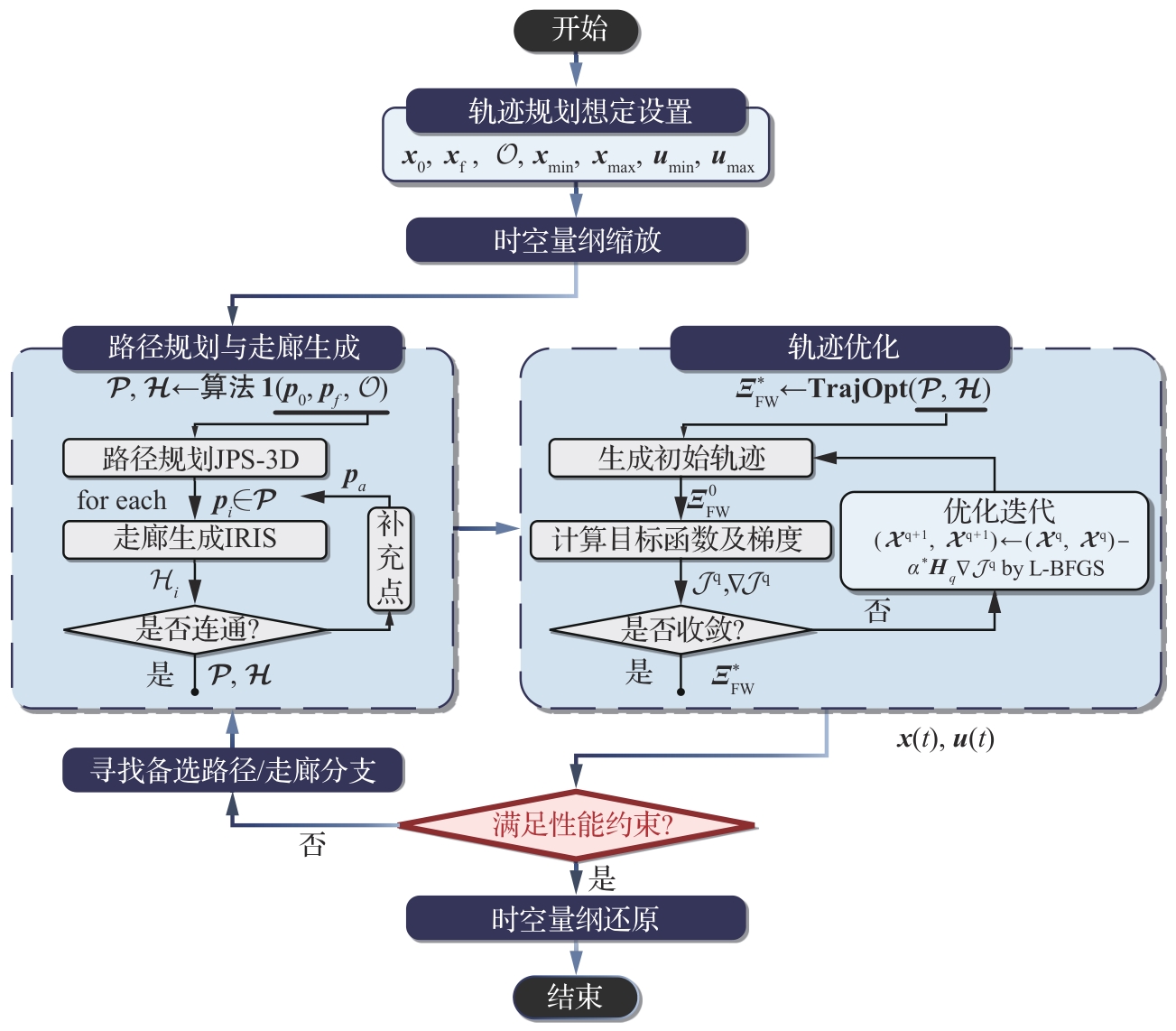
Table 1
Flight performance settings of fixed-wing UAV
| 参数 | 范围 | 参数 | 范围 |
|---|---|---|---|
| [ | [-30, 30] | ||
| (-180, 180] | [-0.5, 0.5] | ||
| [-0.5, 0.5] | [0.5, 1.5] |
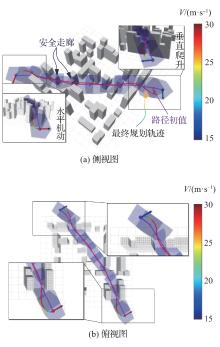
Fig.7
Trajectory planning results (1.5 km×1.5 km)
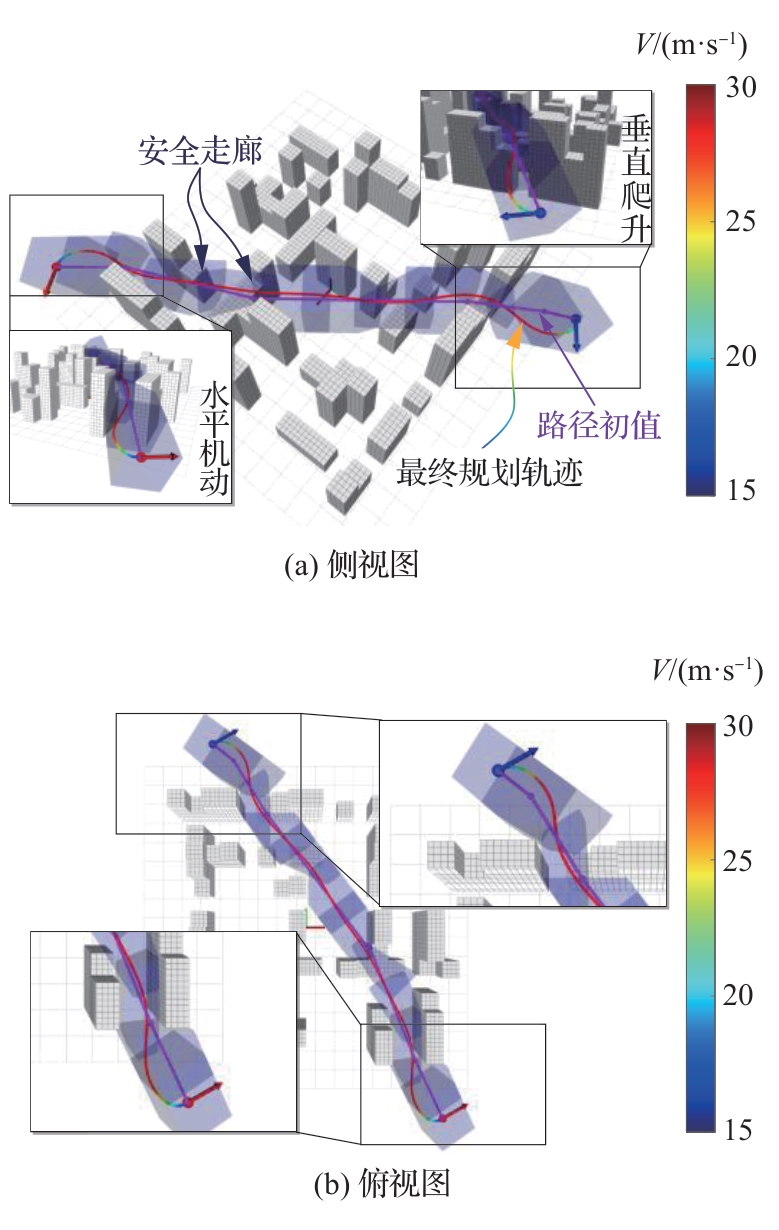
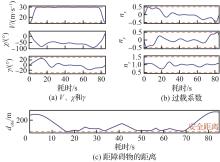
Fig.8
Curves of states and controls
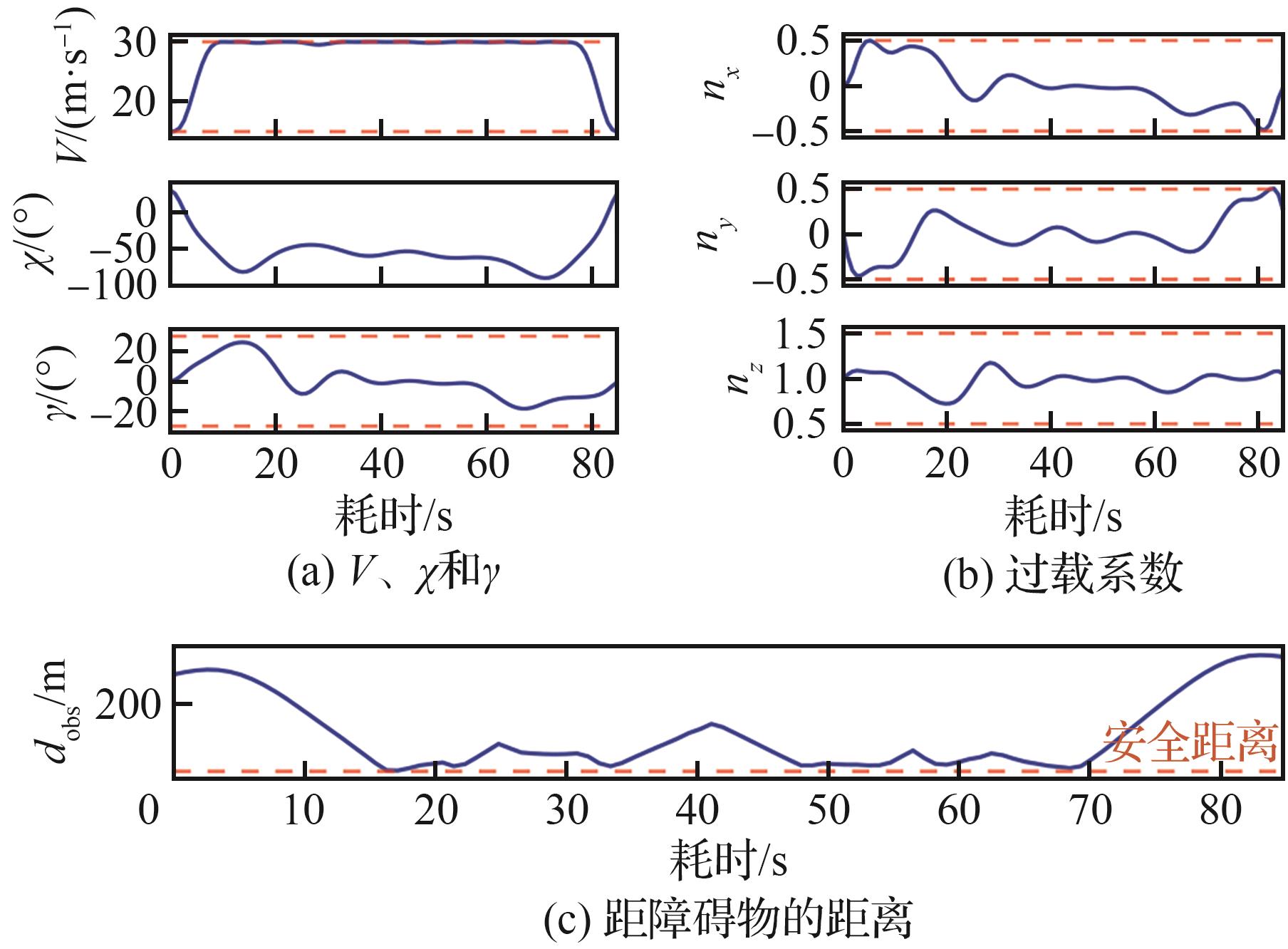
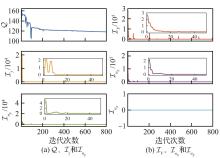
Fig.9
Iteration curves of STH-DFTP algorithm
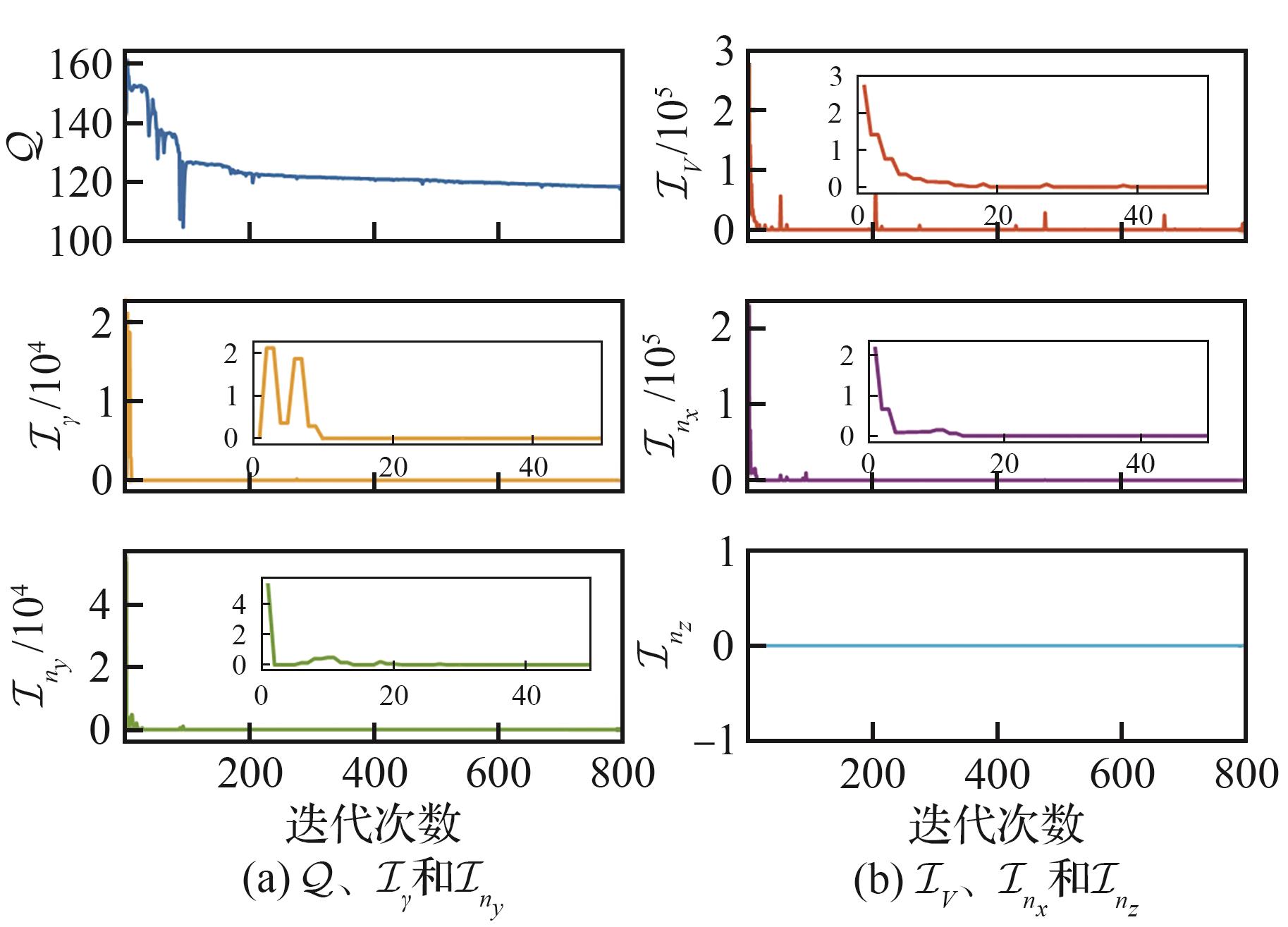

Fig.10
Trajectory planning results of different initial paths and corridor branches
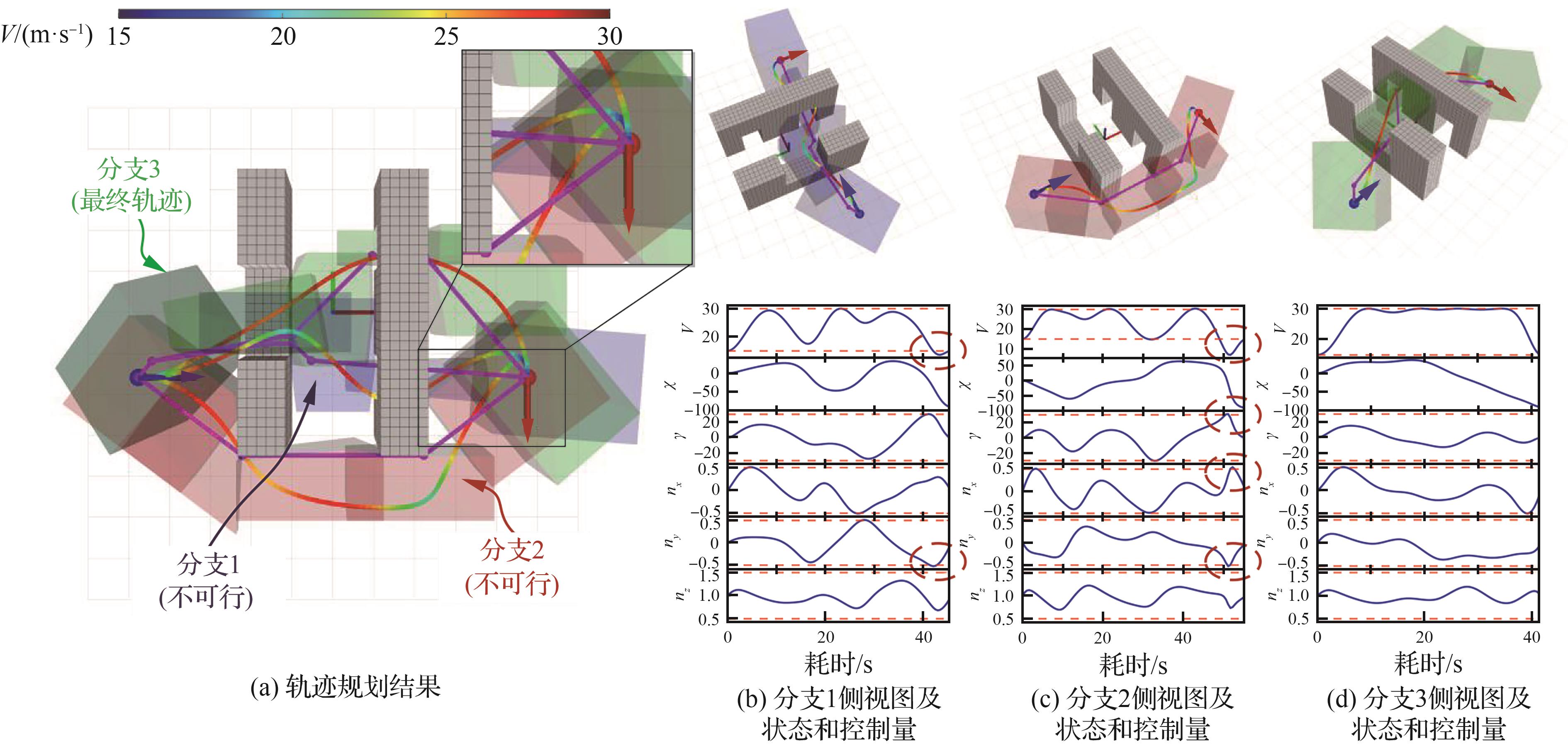
Table 2
Companions of different trajectory branches
| 序号 | 路径长度/m | 轨迹时长/s | 可行性 | 规划耗时/ms |
|---|---|---|---|---|
| 1 | 964.38 | 45.24 | 否 | 24.52 |
| 2 | 1 020.00 | 55.09 | 否 | 23.81 |
| 3 | 1 142.48 | 41.36 | 是 | 24.39 |
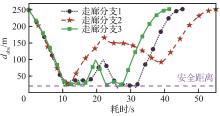
Fig.11
Comparisons of relative distance to obstacles
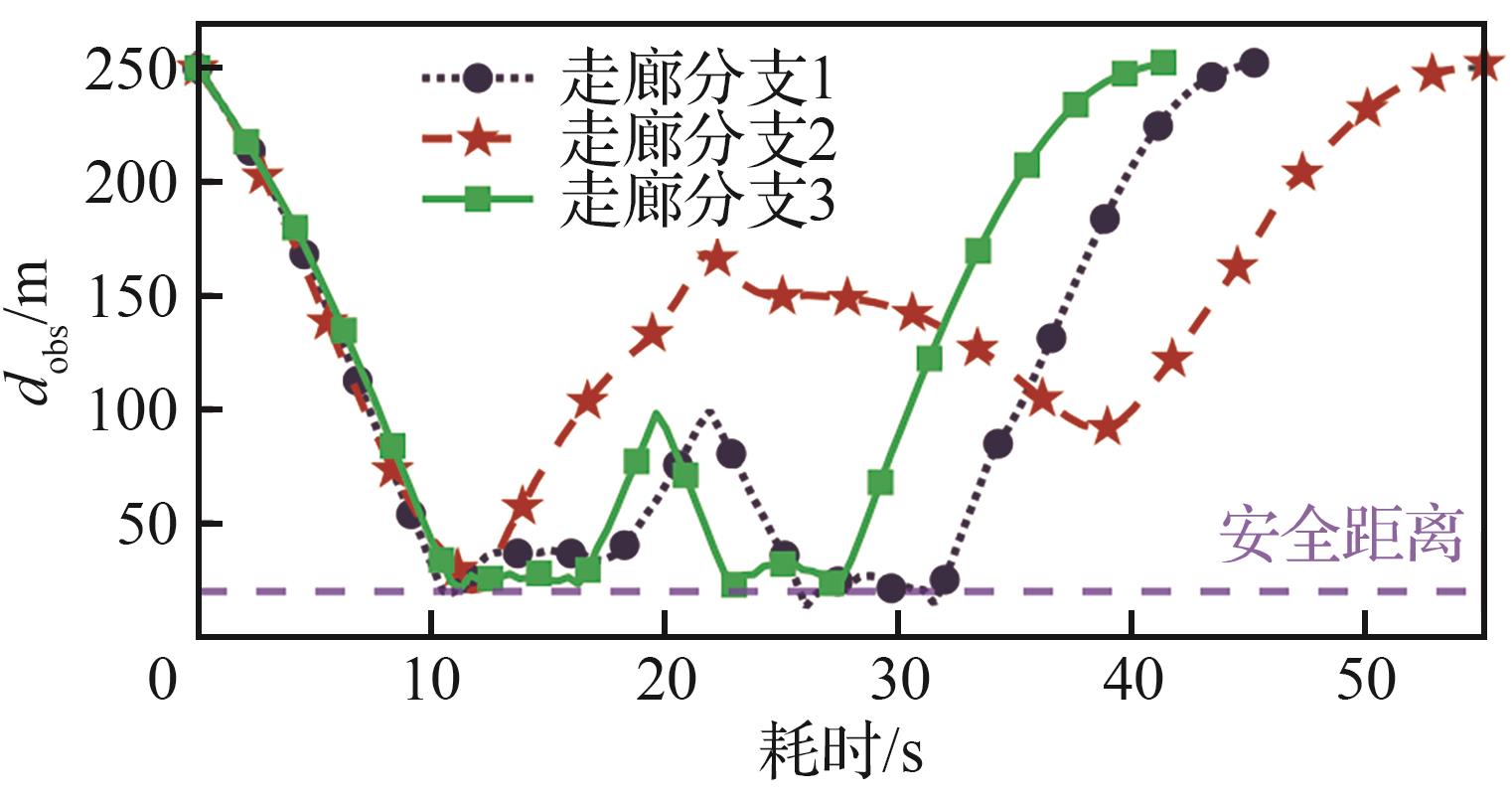
Fig.12
Trajectory planning results of simulation in city blocks environments with different scales
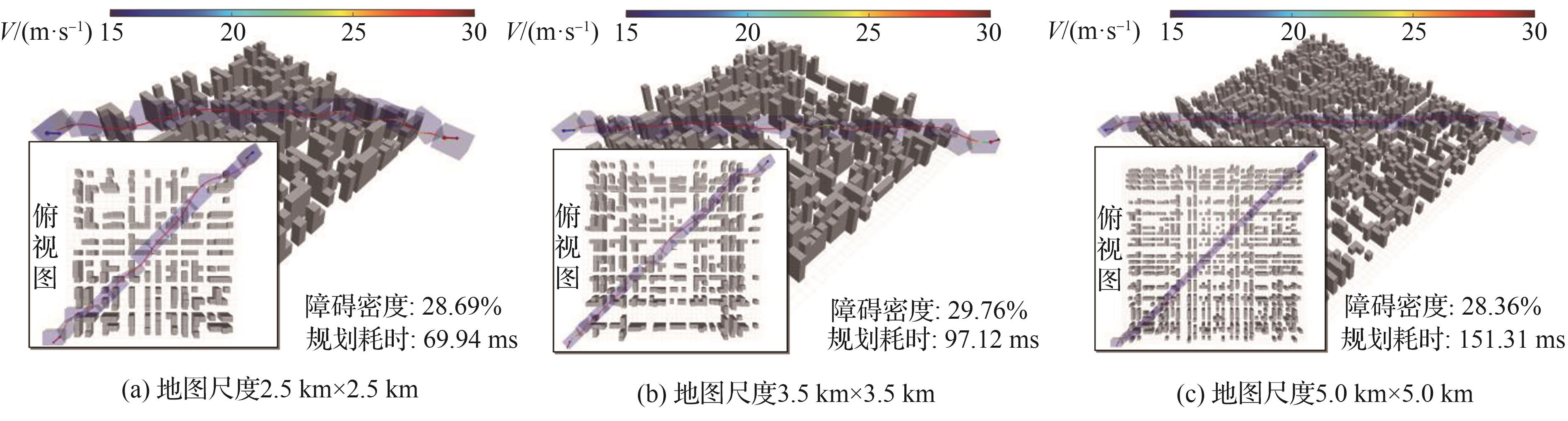

Fig.13
Trajectory planning results of simulation in city blocks environments with different obstacle densities (1.5 km×1.5 km)
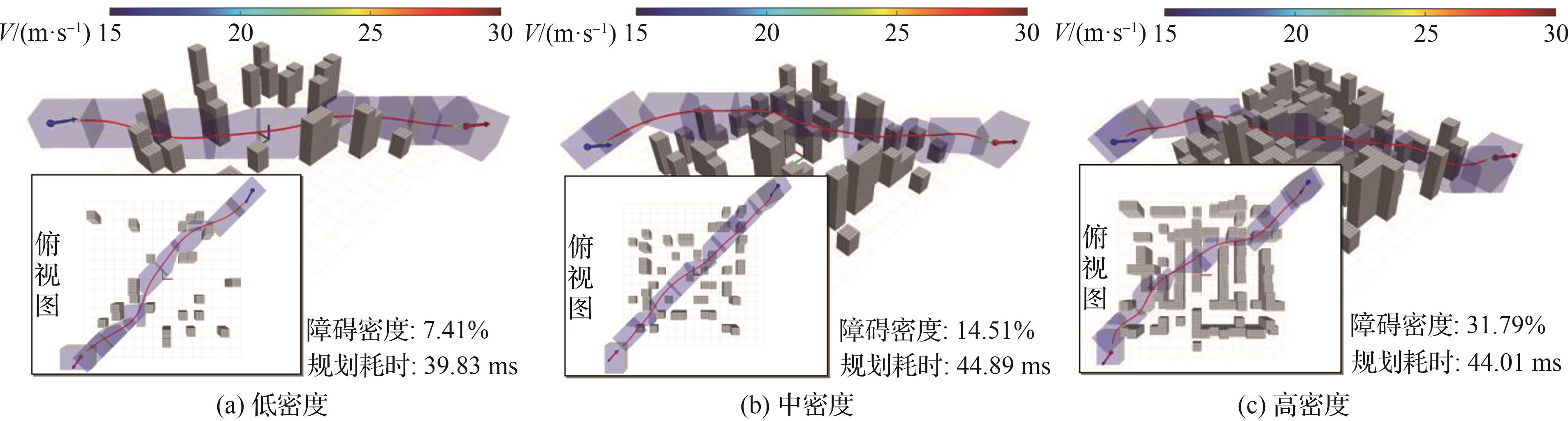

Fig.14
Trajectory planning results of simulation under different typical obstacle types
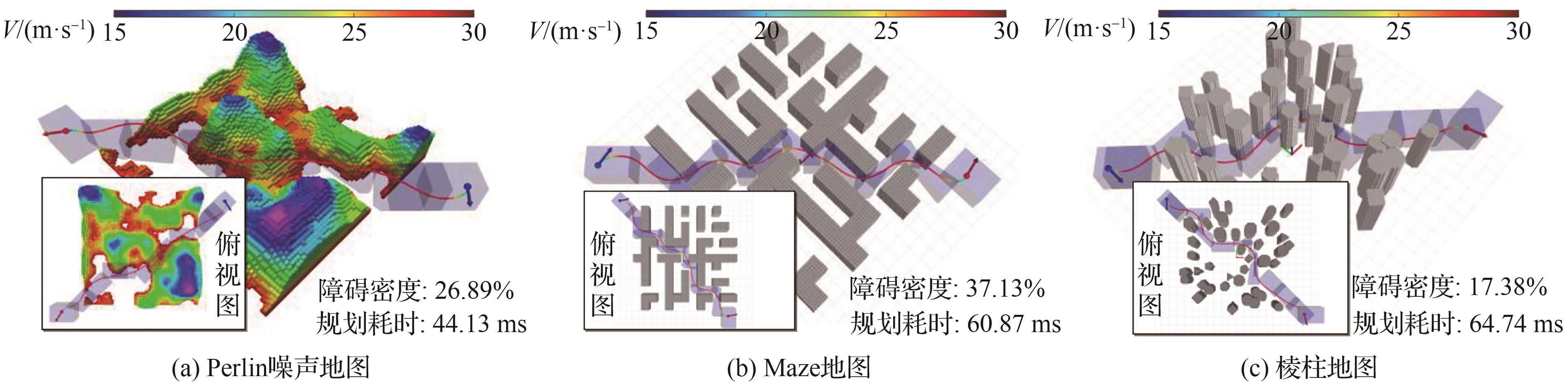

Fig.15
Comparison results of time liness and optimality
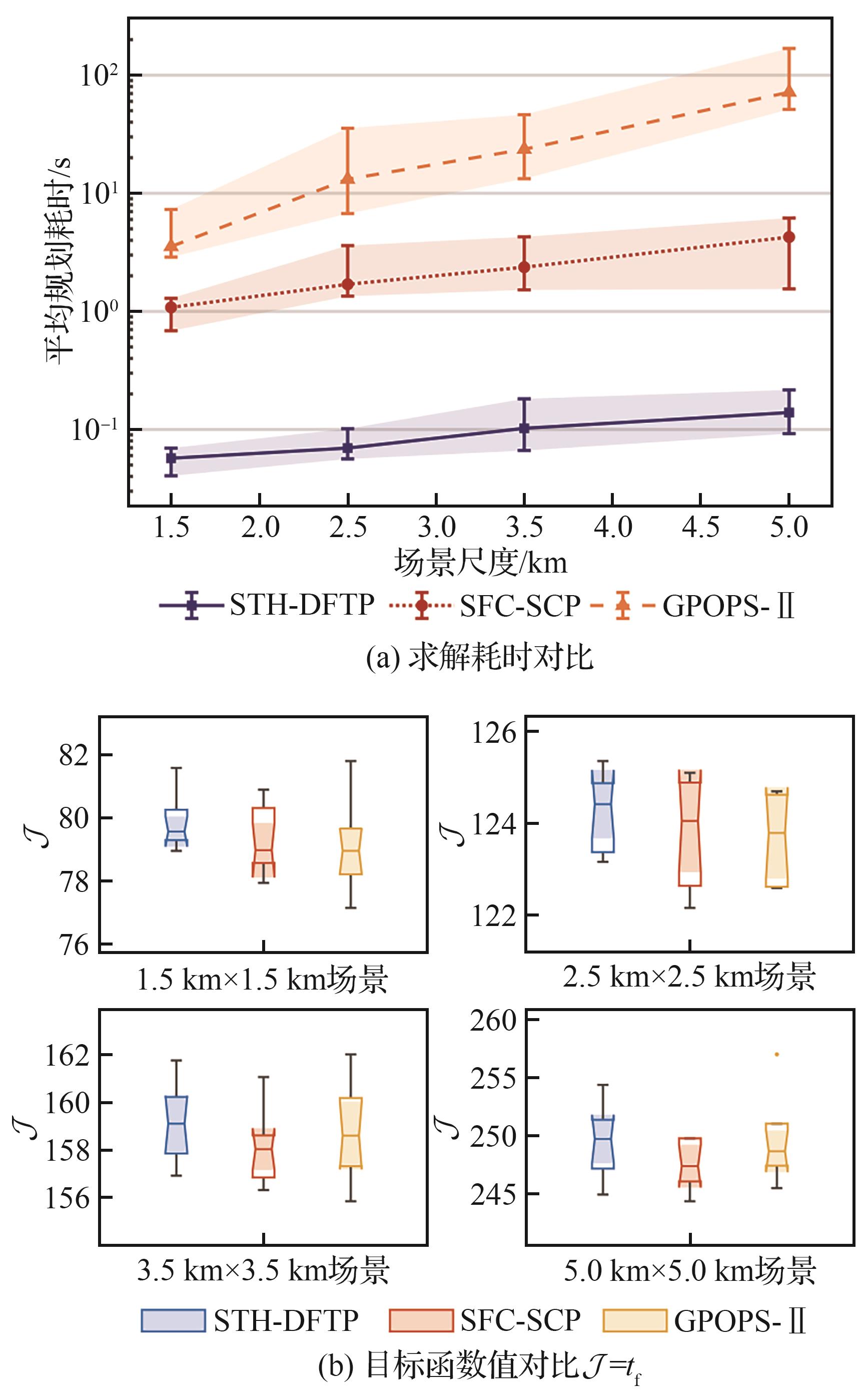
Fig.16
Trajectory planning results of random simulations
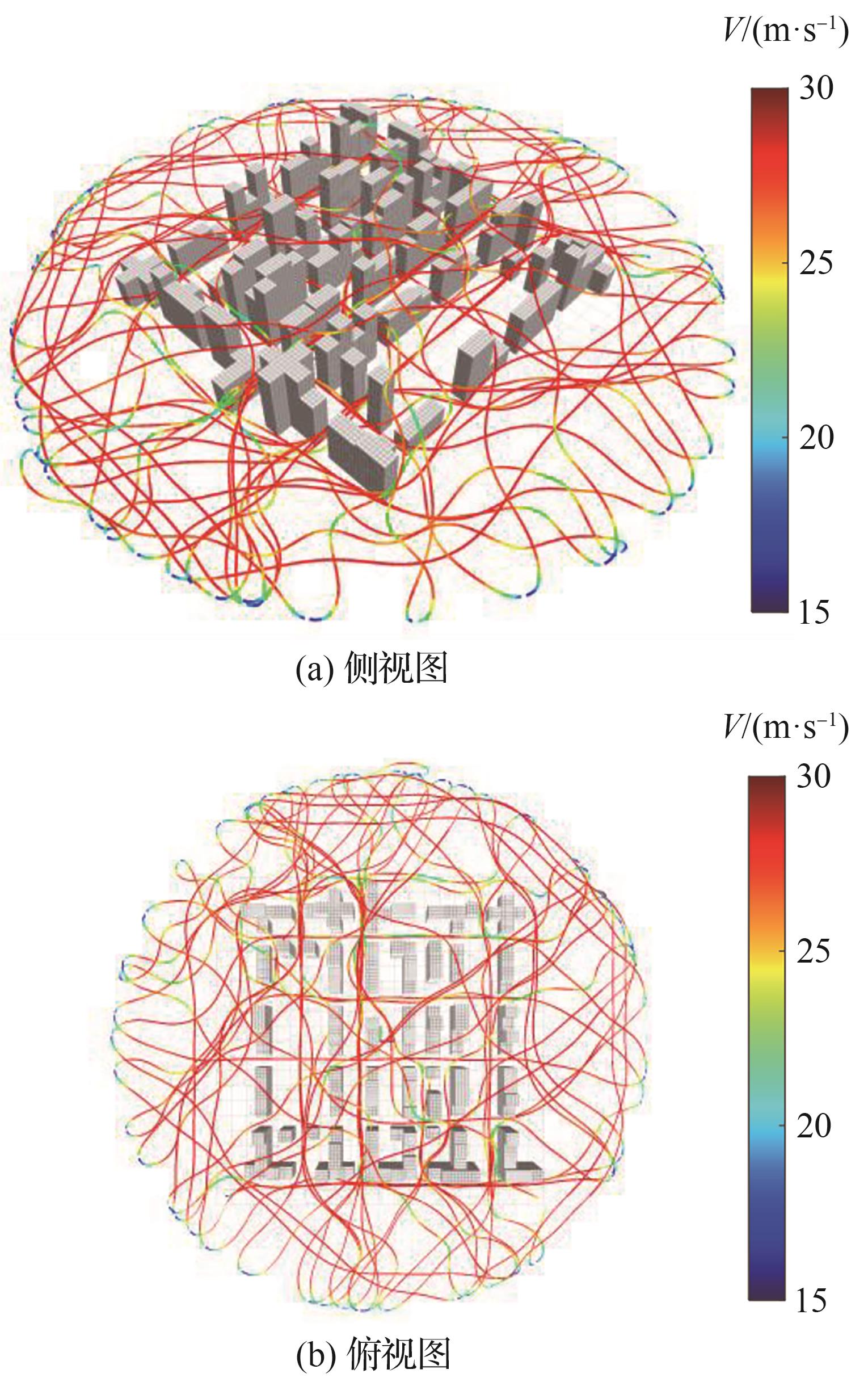
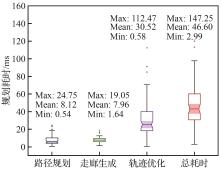
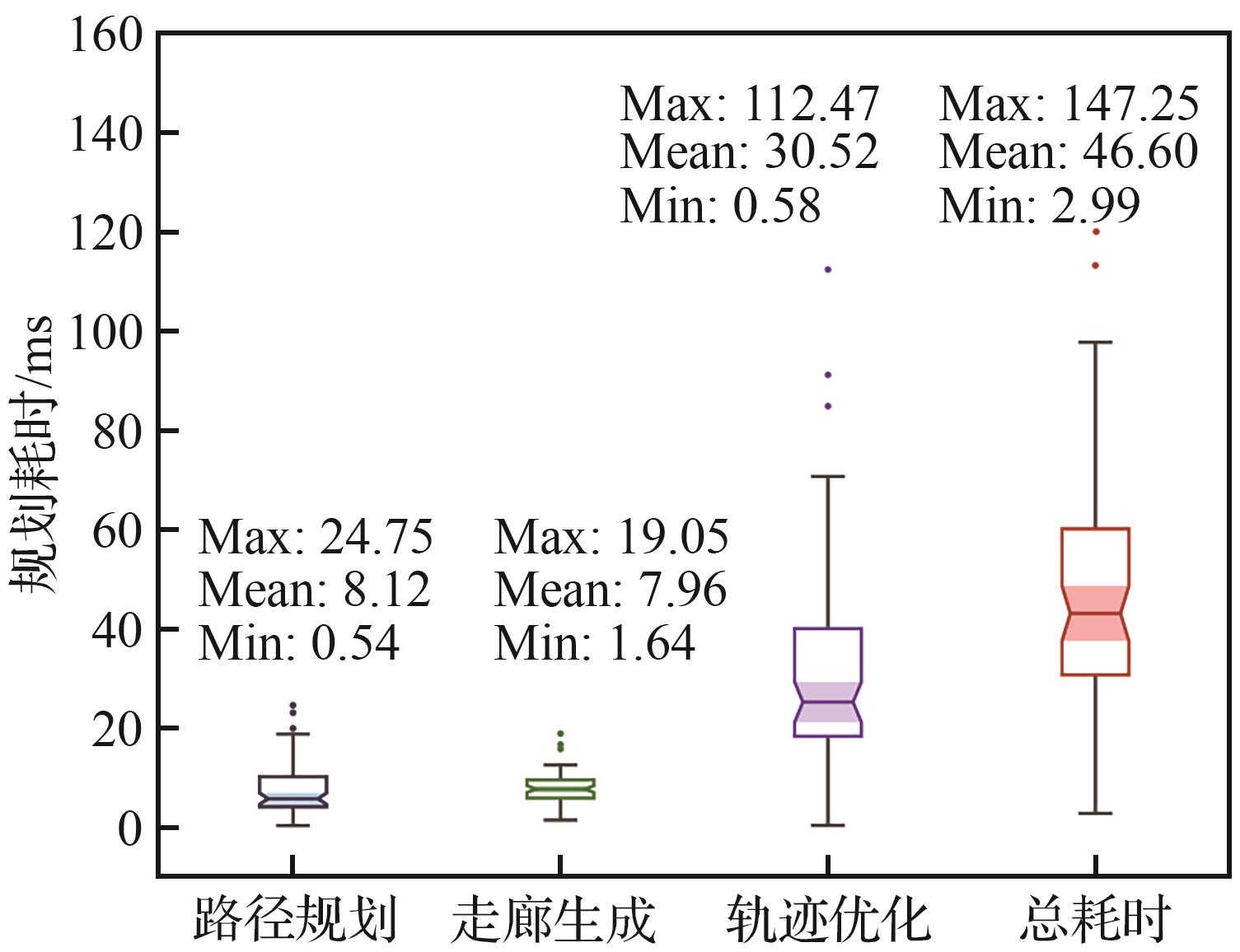
Fig.17
CPU times of random simulations
| [1] | 中华人民共和国工业和信息化部. 通用航空装备创新应用实施方案(2024—2030年)[R/OL]. (2024-03-27)[2024-12-10]. . |
| The Ministry of Industry and Information Technology of the People’s Republic of China. General aviation equipment innovation and application implementation plan (2024—2030)[DB/OL]. (2024-03-27 [2024-12-10]. (in Chinese). | |
| [2] | MOHSAN S A H, KHAN M A, NOOR F, et al. Towards the unmanned aerial vehicles (UAVs): a comprehensive review[J]. Drones, 2022, 6(6): 147. |
| [3] | MIR I, GUL F, MIR S, et al. A survey of trajectory planning techniques for autonomous systems[J]. Electronics, 2022, 11(18): 2801. |
| [4] | LIN X, WANG C Z, WANG K P, et al. Trajectory planning for unmanned aerial vehicles in complicated urban environments: a control network approach[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103120. |
| [5] | 徐广通, 王祝, 曹严, 等. 动态优先级解耦的无人机集群轨迹分布式序列凸规划[J]. 航空学报, 2022, 43(2): 325059. |
| XU G T, WANG Z, CAO Y, et al. Dynamic-priority-decoupled UAV swarm trajectory planning using distri-buted sequential convex programming[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(2): 325059 (in Chinese). | |
| [6] | HUANG G Q, LU Y P, NAN Y. A survey of numerical algorithms for trajectory optimization of flight vehicles[J]. Science China Technological Sciences, 2012, 55(9): 2538-2560. |
| [7] | ZHANG G X, KUANG H L, LIU X F. Fast trajectory optimization for quadrotor landing on a moving platform[C]∥2020 International Conference on Unmanned Aircraft Systems (ICUAS). Athens: IEEE Press, 2020: 238-246. |
| [8] | SUN J, XU G T, WANG Z, et al. Safe flight corridor constrained sequential convex programming for efficient trajectory generation of fixed-wing UAVs[J]. Chinese Journal of Aeronautics, 2025, 38(1): 103174. |
| [9] | WANG Z P, ZHOU X, XU C, et al. Geometrically constrained trajectory optimization for multicopters[J]. IEEE Transactions on Robotics, 2022, 38(5): 3259-3278. |
| [10] | TORDESILLAS J, HOW J P. MADER: trajectory planner in multiagent and dynamic environments[J]. IEEE Transactions on Robotics, 2022, 38(1): 463-476. |
| [11] | DEITS R, TEDRAKE R. Efficient mixed-integer planning for UAVs in cluttered environments[C]∥2015 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2015: 42-49. |
| [12] | LIU S K, WATTERSON M, MOHTA K, et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1688-1695. |
| [13] | PATTERSON M A, RAO A V. GPOPS-Ⅱ: A MATLAB software for solving multiple-phase optimal control problems using hp-adaptive Gaussian quadrature collocation methods and sparse nonlinear programming[J]. ACM Transactions on Mathematical Software, 2014, 41(1): 1-37. |
| [14] | HOUSKA B, FERREAU H J, DIEHL M. ACADO toolkit: an open-source framework for automatic control and dynamic optimization[J]. Optimal Control Applications and Methods, 2011, 32(3): 298-312. |
| [15] | BARRY A J, JENKS T, MAJUMDAR A, et al. Flying between obstacles with an autonomous knife-edge maneuver[C]∥2014 IEEE International Conference on Robo-tics and Automation (ICRA). Piscataway: IEEE Press, 2014: 2559. |
| [16] | XU G T, LONG T, WANG Z, et al. Trust-region filtered sequential convex programming for multi-UAV trajectory planning and collision avoidance[J]. ISA Transactions, 2022, 128: 664-676. |
| [17] | 王祝, 徐广通, 龙腾. 基于定制内点法的多无人机协同轨迹规划[J]. 自动化学报, 2023, 49(11): 2374-2385. |
| WANG Z, XU G T, LONG T. Customized interior-point method for cooperative trajectory planning of multiple unmanned aerial vehicles[J]. Acta Automatica Sinica, 2023, 49(11): 2374-2385 (in Chinese). | |
| [18] | FLIESS M, LÉVINE J, MARTIN P, et al. Flatness and defect of non-linear systems: introductory theory and examples[J]. International Journal of Control, 1995, 61(6): 1327-1361. |
| [19] | MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]∥2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2011: 2520-2525. |
| [20] | TORDESILLAS J, LOPEZ B T, EVERETT M, et al. FASTER: fast and safe trajectory planner for navigation in unknown environments[J]. IEEE Transactions on Robotics, 2022, 38(2): 922-938. |
| [21] | DUAN D Y, ZU R, YU T L, et al. Differential flatness-based real-time trajectory planning for multihelicopter cooperative transportation in crowded environments[J]. AIAA Journal, 2023, 61(9): 4079-4095. |
| [22] | HAN Z C, WU Y W, LI T, et al. An efficient spatial-temporal trajectory planner for autonomous vehicles in unstructured environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(2): 1797-1814. |
| [23] | BRY A, RICHTER C, BACHRACH A, et al. Aggressive flight of fixed-wing and quadrotor aircraft in dense indoor environments[J]. International Journal of Robotics Research, 2015, 34(7): 969-1002. |
| [24] | LIU D C, NOCEDAL J. On the limited memory BFGS method for large scale optimization[J]. Mathematical Programming, 1989, 45(1): 503-528. |
| [25] | ALJUMAILY H, LAEFER D F, CUADRA D, et al. Point cloud voxel classification of aerial urban LiDAR using voxel attributes and random forest approach[J]. International Journal of Applied Earth Observation and Geoinformation, 2023, 118: 103208. |
| [26] | DEITS R, TEDRAKE R. Computing large convex regions of obstacle-free space through semidefinite programming[M]∥Algorithmic Foundations of Robotics XI. Cham: Springer International Publishing, 2015: 109-124. |
| [27] | DOMAHIDI A, CHU E, BOYD S. ECOS: an SOCP solver for embedded systems[C]∥2013 European Control Conference (ECC). Piscataway: IEEE Press, 2013: 3071-3076. |
| [1] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [2] | Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879-530879. |
| [3] | Weicheng DI, Jinkui XU, Zixing WEI, Jinwu XIANG, Zhan TU. Aerial-ground heterogeneous cooperation based on multi-round task allocation method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531348-531348. |
| [4] | Yumei HU, Quan PAN, Bao DENG. A Fisher information based adaptive filtering algorithm for sensor trajectory planning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 629825-629825. |
| [5] | Qingrui ZHANG, Yunyun LIU, Huijie SUN, Bo ZHU. Robust cooperative tracking control for close formation of fixed⁃wing unmanned aerial vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629233-629233. |
| [6] | Zhe LIU, Xige ZHANG, Changzhu WEI, Naigang CUI. High-precision adaptive convex programming for reentry trajectories of suborbital vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729430-729430. |
| [7] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [8] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [9] | Gang LEI, Wei LUO, Yunshu LI, Canhui LAI. Optimization of reentry maneuver trajectory for hypersonic glide vehicles in multiple no-fly zones [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528769-528769. |
| [10] | Qilei GUO, Weimin SANG, Junjie NIU, Ye YUAN. UAV flight strategy considering icing risk under complex meteorological conditions [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 627518-627518. |
| [11] | RAN Qingbo, XIAO Hong, YANG Fuhong, DUAN Yugang. Trajectory planning algorithm for automatic wire laying on perforated surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 425602-425602. |
| [12] | SUN Yang, CHANG Min, BAI Junqiang. Trajectory planning and control for micro-quadrotor perching on vertical surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325756-325756. |
| [13] | HUI Junpeng, WANG Ren, YU Qidong. Generating new quality flight corridor for reentry aircraft based on reinforcement learning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325960-325960. |
| [14] | XIE Hua, LI Zihong, YANG Lei, ZHU Yongwen, LIU Fangzi. Optimization of four-dimensional trajectory of city pair with limited capacity [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 325581-325581. |
| [15] | XU Guangtong, WANG Zhu, CAO Yan, SUN Jingliang, LONG Teng. Dynamic-priority-decoupled UAV swarm trajectory planning using distributed sequential convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 325059-325059. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341