Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (11): 530879.doi: 10.7527/S1000-6893.2024.30879
• Reviews •
Juntong WANG, Danwen BAO( ), Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG
), Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG
Received:2024-06-28
Revised:2024-07-29
Accepted:2024-10-18
Online:2024-10-30
Published:2024-10-29
Contact:
Danwen BAO
E-mail:baodanwen@nuaa.edu.cn
Supported by:CLC Number:
Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879.
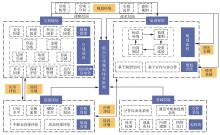
Fig.1
Framework map of low-altitude airspace planning system
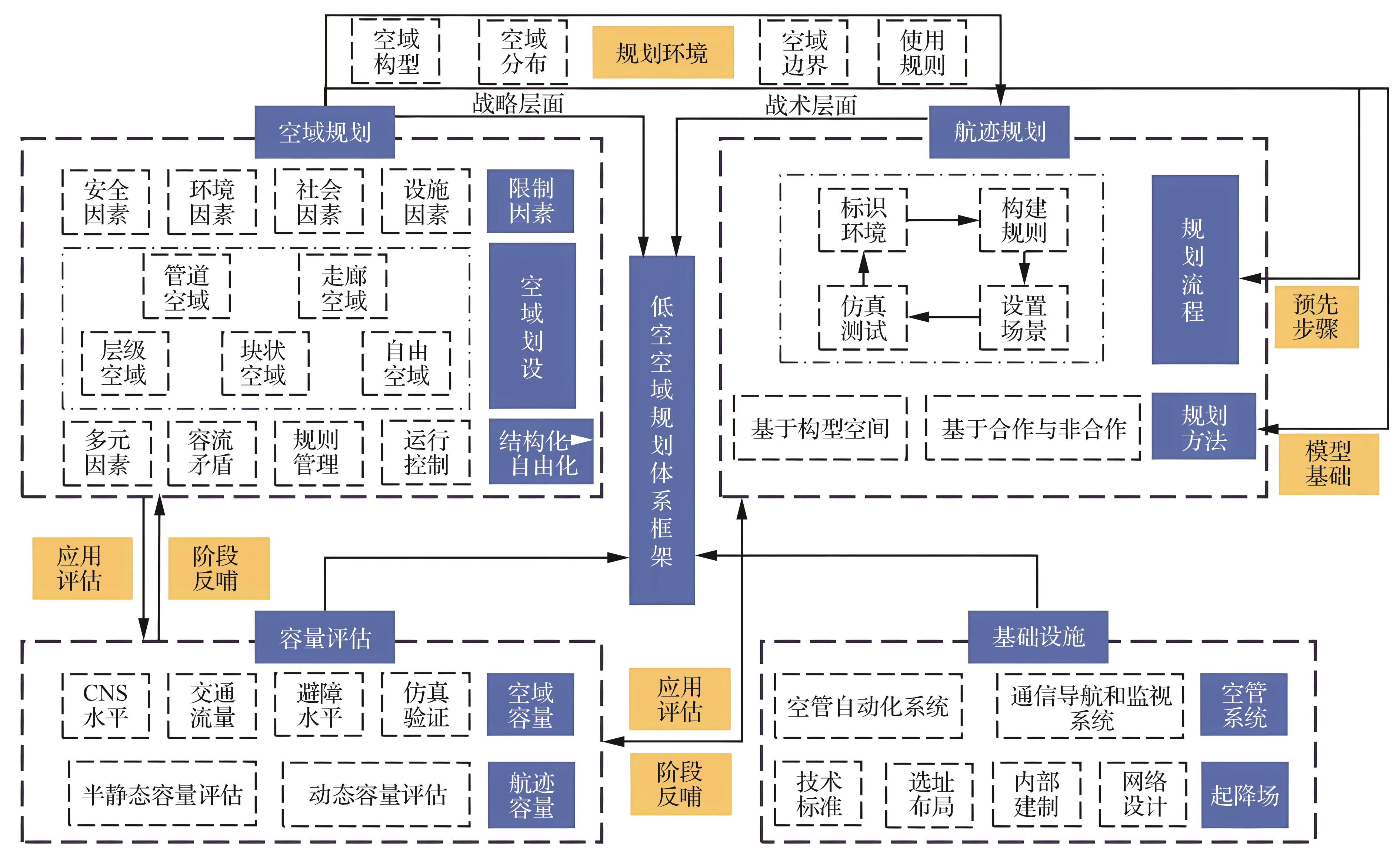

Fig.2
Schematic diagram of structure of five airspaces[39-41]
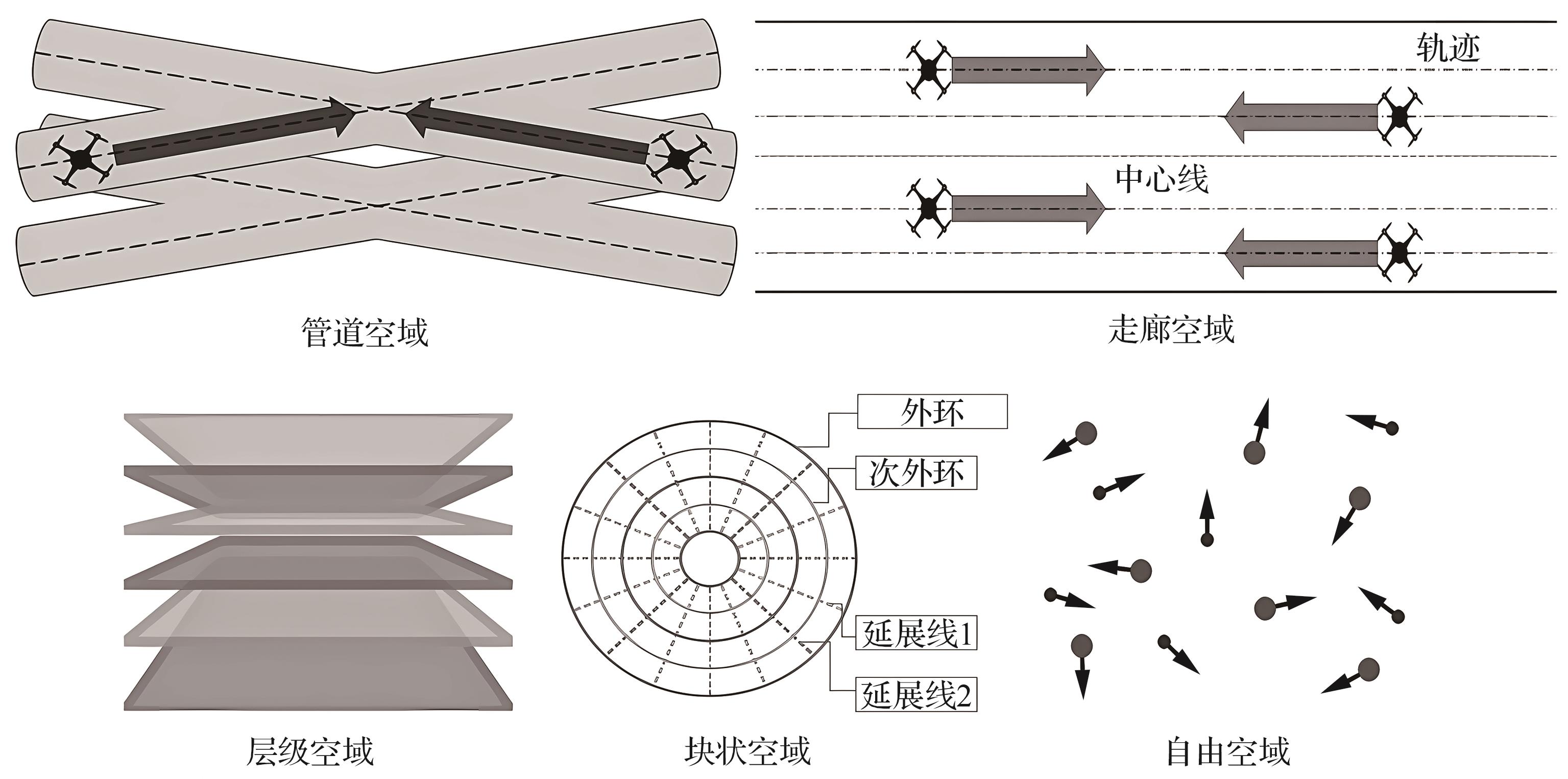
Fig.3
Side view of tube airspace[41]
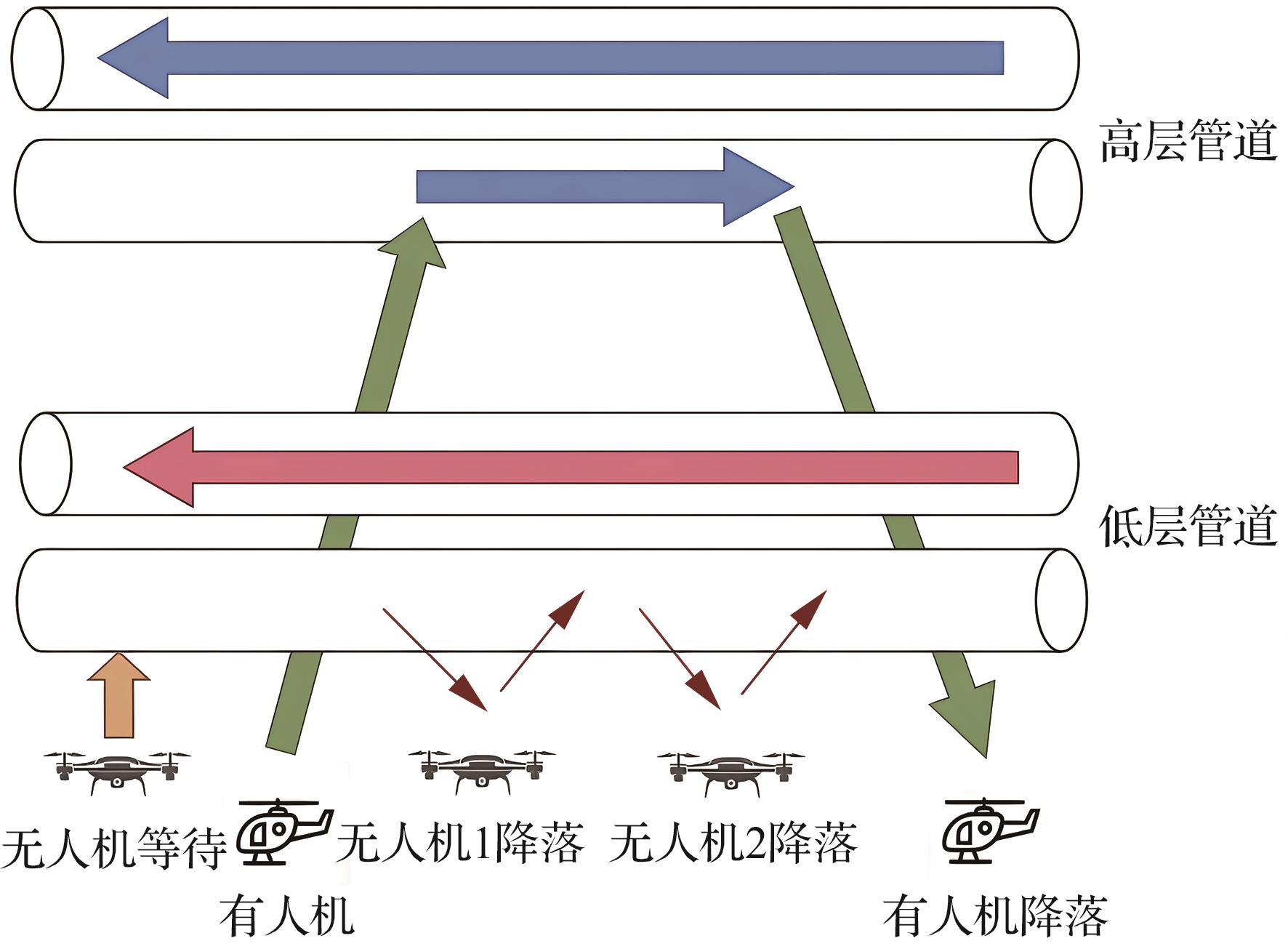
Fig.4
DFW UAM airspace[51]
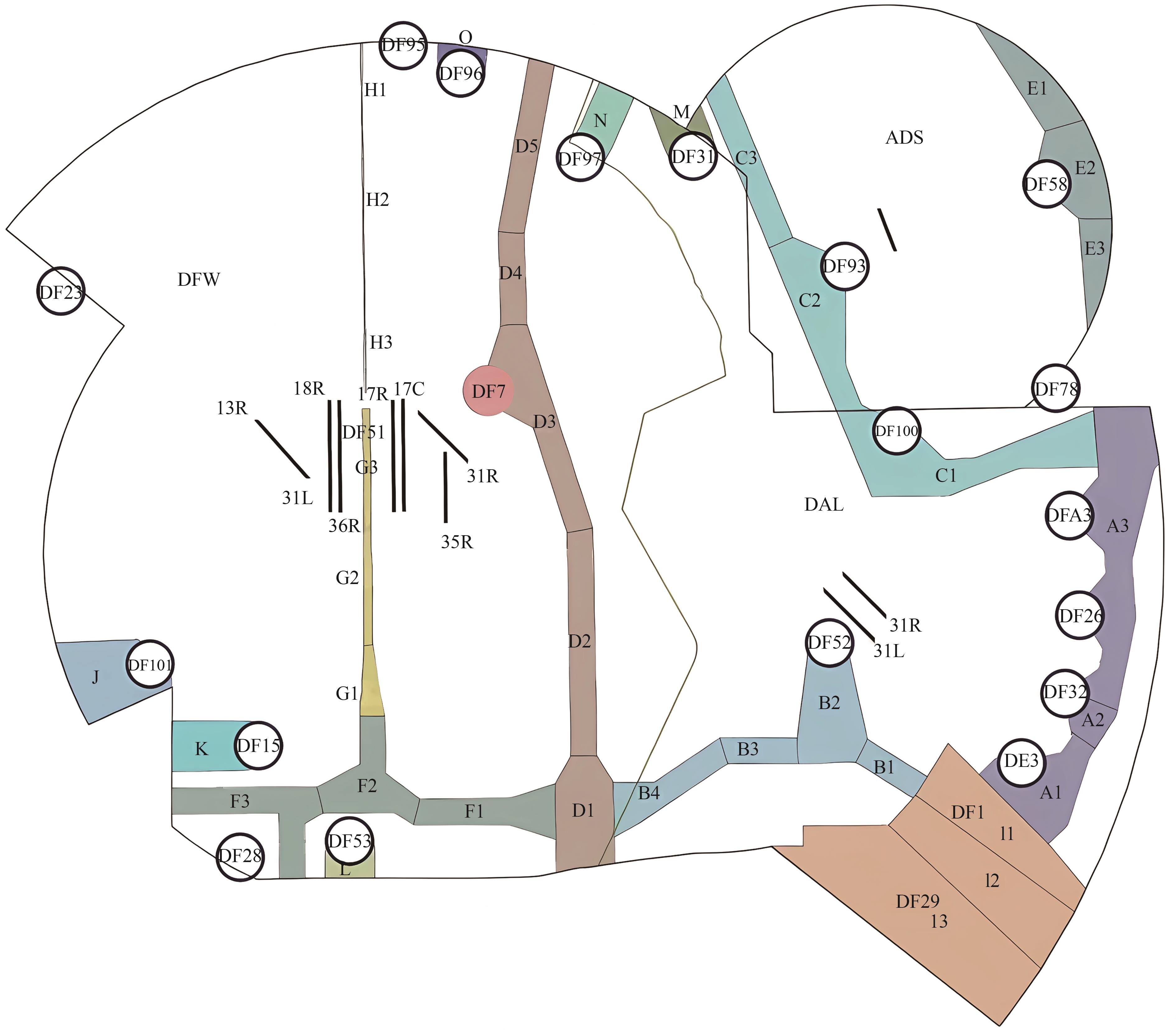
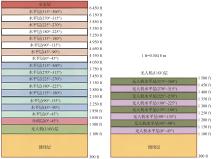
Fig.5
Metropolis layer airspace[41]
Fig.6
Amazon layer airspace[54]
Fig.7
Design of layer airspace below 1 000 m[9]
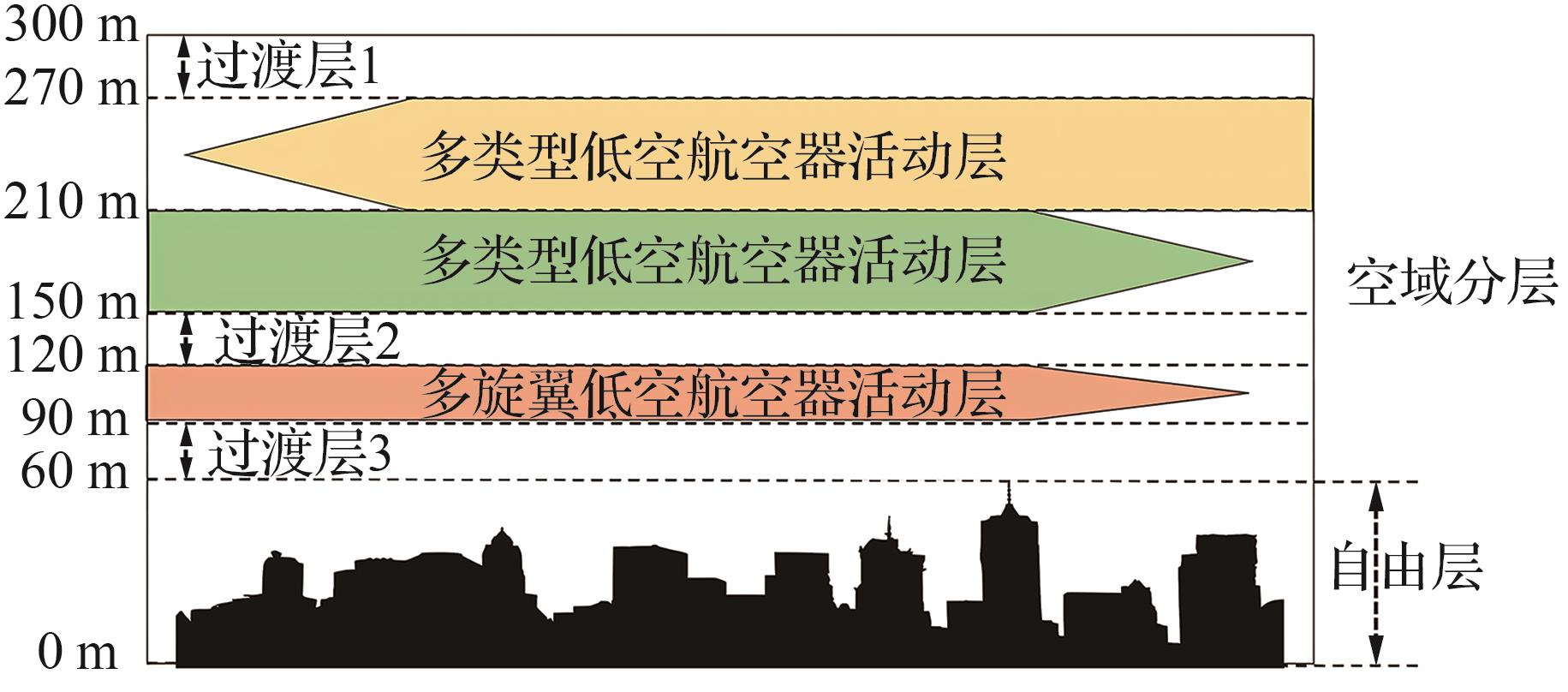
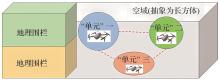
Fig.8
DLR airspace concept[56]
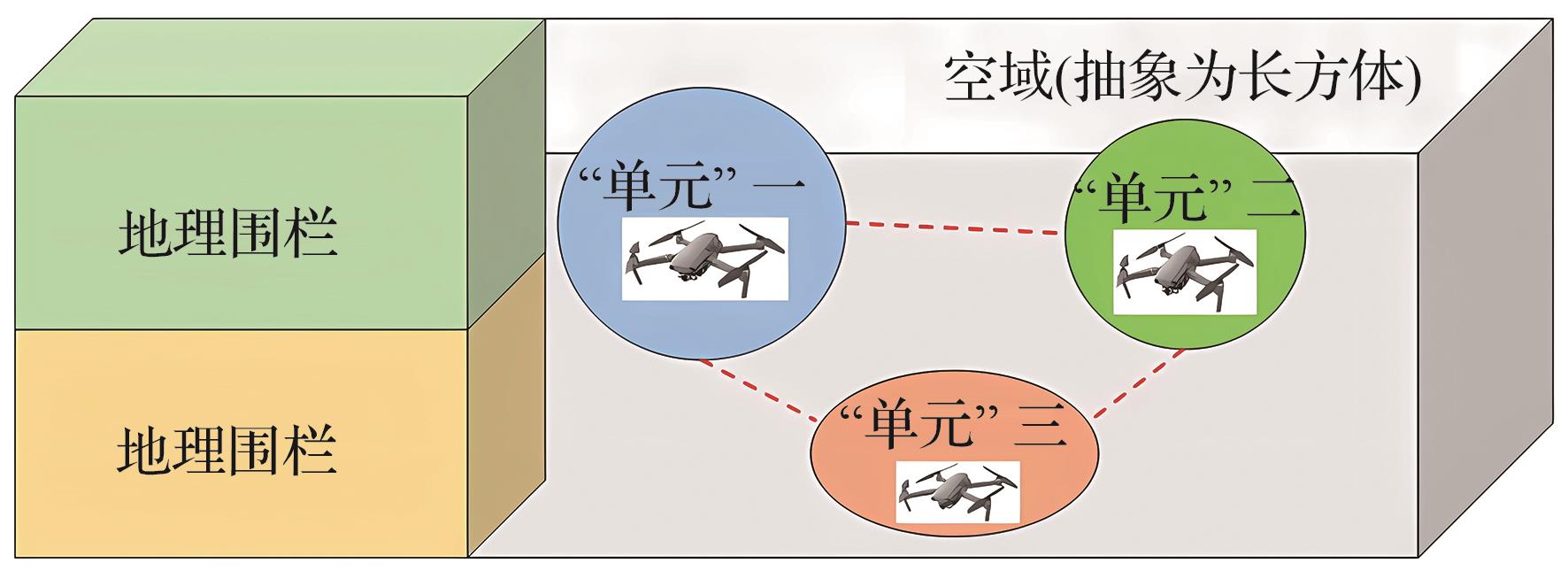

Fig.9
Correspondence between X/Y/Z airspace and surface land use
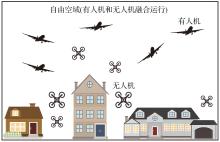
Fig.10
Free-flight airspace concept[41]
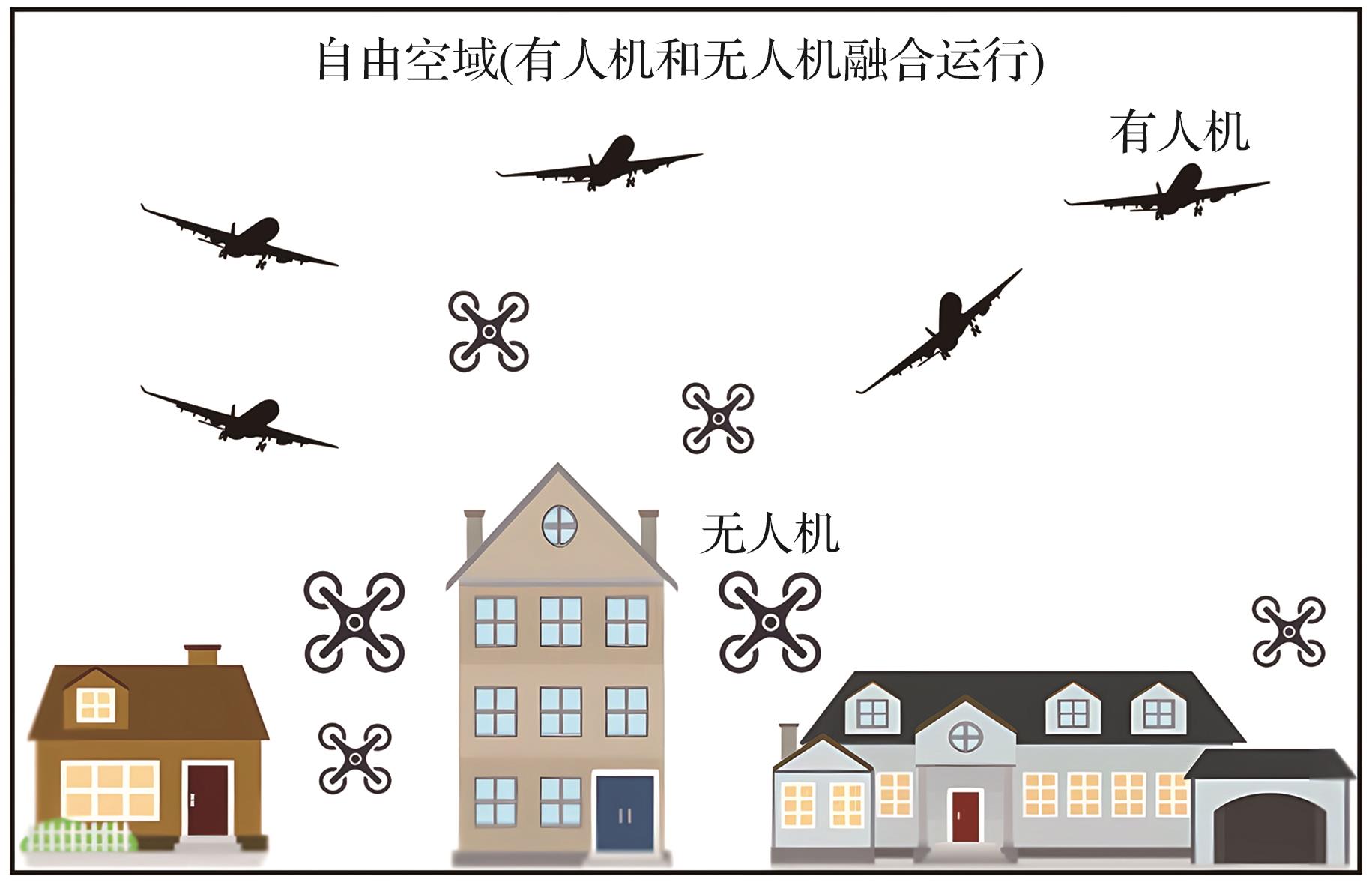
Table 1
Comparison of advantages and disadvantages of five airspace designation types
| 空域类型 | 优点 | 缺点 |
|---|---|---|
| 管道空域 | 结构紧密,划设难度较低安全性高, 后续管理成本低 | 空域容量受限,空域拥堵风险较高,飞行约束较多 |
| 走廊空域 | 鲁棒性较高,运行性能较好, 飞行约束较少 | 走廊中心线和宽度设置难度大,不太适合于不规则的空域条件 |
| 层级空域 | 结构规范,能有效实现航空器垂直分离, 各层空域有明确的使用要求和规则 | 层间距合理设置难度较大,不同地区、不同空域条件设置标准难以统一 |
| 块状空域 | 空域结构能匹配地面城市发展情况, 每块空域包含的服务对象和运行场景清晰 | 航空器垂直分离风险较高,对环境问题和隐私问题解决效果不佳 |
| 自由空域 | 鲁棒性强,空域容量大, 飞行约束极少,空域自由度高 | 航空器碰撞风险高,后续管理成本高,对空域系统相关技术要求和管理要求高 |
Table 2
Comparison of characteristics of five airspace designation types
| 空域构型 | 管道空域 | 层级空域 | 走廊空域 | 块状空域 | 自由空域 |
|---|---|---|---|---|---|
| 基本构型 | 若干立体固定管道形成 立体棋盘状结构 | 若干不同高度范围、 不同功能的空域层 | 不同高度层分布一定 性能空域体或结构 | 若干不同种类/等级 的空域块 | 无结构 |
| 限制因素考虑 | 安全,设施 | 安全,设施 | 安全,设施(不全面), 环境(少) | 安全,设施,环境(少), 社会(少) | 安全,设施 |
| 自由度对比[ | 4-自由度限制 | 1-自由度限制 | 3-自由度限制 | 2-自由度限制 | 0-自由度 限制 |
| 里程碑 | 立体棋盘式、航道式/ 虚拟立体式 | 300~6 500 ft层级空域 | UAM走廊概念 | X、Y、Z块状空域 | 研究较 少,暂无 |
| 空域容量 | 最小 | 较小 | 中等 | 较大 | 最大 |
| 安全性 | 最高 | 较高 | 中等 | 较低 | 最低 |
| 工程实际可用性 | 易 | 较易 | 中等 | 中等 | 难 |
Table 3
Summary of literature on trajectory planning
| 规划方法 | 作者 | 年份 | 算法 | 目标函数/目标 |
|---|---|---|---|---|
| 基于构型空间原理 | Sun等[ | 2017 | 改进人工势场法(新斥力函数) | 航迹平滑与避障 |
| 王庆禄等[ | 2024 | 改进人工势场法(斥力分解) | 有效避障 | |
| Luo等[ | 2022 | 三维JPS算法 | 动静态障碍物避障 | |
| 张洪海等[ | 2022 | 改进A*算法 | 风险、噪声和运输成本代价最小 | |
| 基于合作与非合作原理 | Bertram和Wei[ | 2020 | FastMDP算法 | 高密度动态避障 |
| Cui和Wang[ | 2021 | 双层Q-learning算法 | 动静态障碍物避障 | |
| Yu等[ | 2022 | 改进元胞蚁群算法 | 航迹长度与安全威胁最小 | |
| Tu和Juang[ | 2023 | 改进Q-learning算法 | 动静态障碍物避障 | |
| 解瑞云和海本斋[ | 2024 | 多策略鼠群优化算法 | 航迹长度、高度和转弯角成本最小 |
| [1] | QIU S D, YAO D K, WANG Z K. Analysis of low-altitude airspace[J]. Journal of Physics: Conference Series, 2019, 1302(4): 042032. |
| [2] | ADMINISTRATION F A. Unmanned aircraft system (UAS) traffic management concept of operations V2.0[EB/OL]. (2022-08-16)[2024-03-08]. . |
| [3] | SESAR. U-space blueprint[EB/OL]. (2017-10-30) [2024-03-08]. . |
| [4] | SESAR. European ATM master plan[EB/OL]. (2019-12-17)[2024-03-08]. . |
| [5] | 中央空中交通管理委员会. 低空空域使用管理规定(试行)征求意见稿[EB/OL]. (2014-07-23)[2024-03-08]. . |
| Central Air Traffic Control Board. Draft for soliciting comments on provisions on the administration of the use of low-altitude airspace (for trial implementation)[EB/OL]. (2014-07-23)[2024-03-08]. (in Chinese). | |
| [6] | 中华人民共和国国务院办公厅. 关于促进通用航空业发展的指导意见[EB/OL]. (2016-05-13)[2024-03-0.. |
| General Office of the State Council, People’s Republic of China. Guiding opinions on promoting the development of general aviation industry[EB/OL]. (2016-05-13)[2024-03-08]. (in Chinese). | |
| [7] | BAUM M S. Unmanned aircraft systems traffic management: UTM[M]. Boca Raton: CRC Press, 2021: 84-95. |
| [8] | QU W Q, XU C C, TAN X, et al. Preliminary concept of urban air mobility traffic rules[J]. Drones, 2023, 7(1): 54. |
| [9] | 全权, 李刚, 柏艺琴, 等. 低空无人机交通管理概览与建议[J]. 航空学报, 2020, 41(1): 023238. |
| QUAN Q, LI G, BAI Y Q, et al. Low altitude UAV traffic management: An introductory overview and proposal[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 023238 (in Chinese). | |
| [10] | 李诚龙, 屈文秋, 李彦冬, 等. 面向eVTOL航空器的城市空中运输交通管理综述[J]. 交通运输工程学报, 2020, 20(4): 35-54. |
| LI C L, QU W Q, LI Y D, et al. Overview of traffic management of urban air mobility (UAM) with eVTOL aircraft[J]. Journal of Traffic and Transportation Engineering, 2020, 20(4): 35-54 (in Chinese). | |
| [11] | BAURANOV A, RAKAS J. Designing airspace for urban air mobility: A review of concepts and approaches[J]. Progress in Aerospace Sciences, 2021, 125: 100726. |
| [12] | COLE K. Reactive trajectory generation and formation control for groups of UAVs in windy environments[D]. Washington, D.C.: The George Washington University, 2018. |
| [13] | TANG C K, WANG Y Y, ZHANG L L, et al. GNSS/inertial navigation/wireless station fusion UAV 3-D positioning algorithm with urban canyon environment[J]. IEEE Sensors Journal, 2022, 22(19): 18771-18779. |
| [14] | CHRISTIAN A W, CABELL R. Initial investigation into the psychoacoustic properties of small unmanned aerial system noise[C]∥23rd AIAA/CEAS Aeroacoustics Conference. Reston: AIAA, 2017. |
| [15] | 管淑君. 基于相角控制的多旋翼噪声抑制技术研究[D]. 南京: 南京航空航天大学, 2021. |
| GUAN S J. Research on multi-rotor noise suppression technology based on phase angle control[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021 (in Chinese). | |
| [16] | SCHÄFFER B, PIEREN R, HEUTSCHI K, et al. Drone noise emission characteristics and noise effects on humans-a systematic review[J]. International Journal of Environmental Research and Public Health, 2021, 18(11): 5940. |
| [17] | TORIJA A J, CLARK C. A psychoacoustic approach to building knowledge about human response to noise of unmanned aerial vehicles[J]. International Journal of Environmental Research and Public Health, 2021, 18(2): 682. |
| [18] | WAKIL K, NAEEM M A, ANJUM G A, et al. A hybrid tool for visual pollution assessment in urban environments[J]. Sustainability, 2019, 11(8): 2211. |
| [19] | AIRBUS. An assessment of public perception of Urban Air Mobility (UAM)[EB/OL]. (2023-06-26)[2024-03-08]. . |
| [20] | EASA. Study on the societal acceptance of Urban Air Mobility in Europe[EB/OL]. (2021-05-19)[2024-03-08]. . |
| [21] | CLOTHIER R A, GREER D A, GREER D G, et al. Risk perception and the public acceptance of drones[J]. Risk Analysis, 2015, 35(6): 1167-1183. |
| [22] | CHANG V, CHUNDURY P, CHETTY M, et al. Spiders in the sky[C]∥Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems. New York: ACM, 2017: 6765-6776. |
| [23] | LIDYNIA C, PHILIPSEN R, ZIEFLE M. Droning on about drones: Acceptance of and perceived barriers to drones in civil usage contexts[M]∥Advances in human factors in robots and unmanned systems. Cham: Springer International Publishing, 2016: 317-329. |
| [24] | SESAR. UAM use cases and scenarios (AMU-LED D 3.1)[EB/OL]. (2021-07-02)[2024-03-08]. . |
| [25] | VASCIK P D, BALAKRISHNAN H, HANSMAN R J. Assessment of air traffic control for urban air mobility and unmanned systems[EB/OL]. (2018-09-10)[2024-03-08]. . |
| [26] | SCHUCHARDT BIANCA I, DAGI G, THOMAS L, et al. Air traffic management as a vital part of urban air mobility: A review of DLR’s research work from 1995 to 2022[J]. Aerospace, 2023, 10(1): 81. |
| [27] | SESAR. Operational safety analysis and concept (AMU-LED D 2.1)[EB/OL]. (2021-07-02)[2024-03-08]. . |
| [28] | 张洪海, 李姗, 夷珈, 等. 城市低空航路规划研究综述[J]. 南京航空航天大学学报, 2021, 53(6): 827-838. |
| ZHANG H H, LI S, YI J, et al. Review on urban low-altitude air route planning[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2021, 53(6): 827-838 (in Chinese). | |
| [29] | ZENG Y, LYU J B, ZHANG R. Cellular-connected UAV: Potential, challenges, and promising technologies[J]. IEEE Wireless Communications, 2019, 26(1): 120-127. |
| [30] | 程琦. 城市环境GNSS定位导航关键技术研究[D]. 南京: 南京航空航天大学, 2021: 14-16. |
| CHENG Q. Research on key technologies of GNSS positioning and navigation in urban environment[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021: 14-16 (in Chinese). | |
| [31] | NIU Z, NIE P, TAO L, et al. RTK with the assistance of an IMU-based pedestrian navigation algorithm for smartphones[J]. Sensors, 2019, 19(14): 3228. |
| [32] | 陈晓, 毛烨炳. ADS-B技术在低空空域安全中应用的现状与展望[J]. 电子测量技术, 2022, 45(20): 61-67. |
| CHEN X, MAO Y B. Status and prospect of ADS-B technology application in low-altitude airspace security[J]. Electronic Measurement Technology, 2022, 45(20): 61-67 (in Chinese). | |
| [33] | EASA. Prototype technical specifications for the design of VFR vertiports for operation with manned VTOL-capable aircraft certified in the enhanced category (PTS-VPT-DSN)[EB/OL]. (2022-03-24)[2024-03-08]. . |
| [34] | YU Y, WANG M Y, MESBAHI M, et al. Vertiport selection in hybrid air-ground transportation networks via mathematical programs with equilibrium constraints[J]. IEEE Transactions on Control of Network Systems, 2023, 10(4): 2108-2119. |
| [35] | ZHANG H H, WANG F, FENG D K, et al. A logistics UAV parcel-receiving station and public air-route planning method based on bi-layer optimization[J]. Applied Sciences, 2023, 13(3): 1842. |
| [36] | REN X H, LI R B. The location problem of medical drone vertiports for emergency cardiac arrest needs[J]. Sustainability, 2024, 16(1): 44. |
| [37] | WU Z Q, ZHANG Y. Integrated network design and demand forecast for on-demand urban air mobility[J]. Engineering, 2021, 7(4): 473-487. |
| [38] | 钱欣悦, 张洪海, 张芳, 等. 末端配送物流无人机起降点选址分配问题研究[J]. 武汉理工大学学报(交通科学与工程版), 2021, 45(4): 682-687, 693. |
| QIAN X Y, ZHANG H H, ZHANG F, et al. Research on location allocation of UAV landing points for terminal distribution logistics[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2021, 45(4): 682-687, 693 (in Chinese). | |
| [39] | SUNIL E, HOEKSTRA J, ELLERBROEK J, et al. Metropolis: Relating airspace structure and capacity for extreme traffic densities[C]∥11th USA/EUROPE Air Traffic Management R & D Seminar (ATM2015), 2015: 1-10. |
| [40] | METROPOLIS. Metropolis WP1 work plan[EB/OL]. (2014-03-05)[2024-03-08]. . |
| [41] | METROPOLIS. METROPOLIS concept design report[EB/OL]. (2014-10-03)[2024-03-08]. . |
| [42] | QUAN Q, FU R, LI M X, et al. Practical distributed control for VTOL UAVs to pass a virtual tube[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(2): 342-353. |
| [43] | QUAN Q, GAO Y, BAI C G. Distributed control for a robotic swarm to pass through a curve virtual tube[J]. Robotics and Autonomous Systems, 2023, 162: 104368. |
| [44] | NASA. Corridor design and analysis for UAM op-erations[EB/OL]. (2022-01-29)[2024-03-08]. . |
| [45] | JANG D S, IPPOLITO C A, SANKARARAMAN S, et al. Concepts of airspace structures and system analysis for UAS traffic flows for urban areas[C]∥AIAA Information Systems-AIAA Infotech @ Aerospace. Reston: AIAA, 2017. |
| [46] | AIRBUS. Blue print for the sky: The road map for the safe integration of autonomous aircraft[EB/OL]. (2018-09-05)[2024-03-08]. . |
| [47] | EMBRAERX. Flight plan 2030: An air traffic man-agement concept for urban air mobility[EB/OL]. (2019-05-28)[2024-03-08]. . |
| [48] | MUNA S I, MUKHERJEE S, NAMUDURI K, et al. Air corridors: concept, design, simulation, and rules of engagement[J]. Sensors, 2021, 21(22): 7536. |
| [49] | ADMINISTRATION F A. Unmanned aircraft syste-m (UAS) traffic management concept of operation-s V1.0[EB/OL]. (2018-06-05) [2024-03-08]. . |
| [50] | UAM T K. K-UAM concept of operations 1.0[EB/OL]. (2021-09-29)[2024-03-08]. . |
| [51] | VERMA S, DULCHINOS V, WOOD R D, et al. Design and analysis of corridors for UAM operations[C]∥2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC). Reston: AIAA, 2022. |
| [52] | LASCARA B, LACHER A, DEGARM O M, et al. Urban air mobility airspace integration concepts[EB/OL](2019-06-10)[2024-03-08]. . |
| [53] | MCCARTHY T, PFORTE L, BURKE R. Fundamental elements of an urban UTM[J]. Aerospace, 2020, 7(7): 85. |
| [54] | AMAZON. Revising the airspace model for the safe integration of sUAS[EB/OL]. (2015-11-28)[2024-03-08]. . |
| [55] | DACUS. Structures and rules in capacity constrai-ned (urban) environments (D 5.1)[EB/OL]. (2021-05-27)[2024-03-08]. . |
| [56] | DLR. DLR blueprint[EB/OL]. (2017-12-15)[2024-03-08]. . |
| [57] | QUAN Q, FU R, CAI K Y. How far two UAVs should be subject to communication uncertainties[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 429-445. |
| [58] | CORUS. U-space concept of operations vol1[EB/OL]. (2019-11-08)[2024-03-08]. . |
| [59] | HOEKSTRA J M, RUIGROK R C J, GENT V. Free flight in a crowded airspace?[M]. Reston: AIAA, 2001. |
| [60] | HOEKSTRA J M, VAN GENT R N H W, RUIGROK R C J. Designing for safety: The ‘free flight’ air traffic management concept[J]. Reliability Engineering & System Safety, 2002, 75(2): 215-232. |
| [61] | 张洪海, 邹依原, 张启钱, 等. 未来城市空中交通管理研究综述[J]. 航空学报, 2021, 42(7): 024638. |
| ZHANG H H, ZOU Y Y, ZHANG Q Q, et al. Future urban air mobility management: Review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(7): 024638 (in Chinese). | |
| [62] | JARDIN M R. Analytical relationships between conflict counts and air-traffic density[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(6): 1150-1156. |
| [63] | QUAN Q, LI M X, FU R. Sky highway design for dense traffic[J]. IFAC-PapersOnLine, 2021, 54(2): 140-145. |
| [64] | VÁSÁRHELYI G, VIRÁGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3(20): eaat3536. |
| [65] | AGGARWAL S, KUMAR N. Path planning techniques for unmanned aerial vehicles: Review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270-299. |
| [66] | LIU J Y, GUO Z Q, LIU S Y. The simulation of the UAV collision avoidance based on the artificial potential field method[J]. Advanced Materials Research, 2012, 591-593: 1400-1404. |
| [67] | SUN J Y, TANG J, LAO S Y. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm[J]. IEEE Access, 2017, 5: 18382-18390. |
| [68] | 王庆禄, 吴冯国, 郑成辰, 等. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5): 1461-1468. |
| WANG Q L, WU F G, ZHENG C C, et al. UAV path planning based on optimized artificial potential field method[J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468 (in Chinese). | |
| [69] | ZHANG N, ZHANG M C, LOW K H. 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace[J]. Transportation Research Part C: Emerging Technologies, 2021, 129: 103123. |
| [70] | LUO Y, LU J K, ZHANG Y, et al. 3D JPS path optimization algorithm and dynamic-obstacle avoidance design based on near-ground search drone[J]. Applied Sciences, 2022, 12(14): 7333. |
| [71] | 张洪海, 张连东, 刘皞, 等. 城市低空物流无人机航迹规划模型研究[J]. 交通运输系统工程与信息, 2022, 22(1): 256-264. |
| ZHANG H H, ZHANG L D, LIU H, et al. Track planning model for logistics unmanned aerial vehicle in urban low-altitude airspace[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(1): 256-264 (in Chinese). | |
| [72] | BERTRAM J, WEI P. Distributed computational guidance for high-density urban air mobility with cooperative and non-cooperative collision avoidance[C]∥AIAA Scitech 2020 Forum. Reston: AIAA, 2020. |
| [73] | FU S Y, HAN L W, TIAN Y, et al. Path planning for unmanned aerial vehicle based on genetic algorithm[C]∥2012 IEEE 11th International Conference on Cognitive Informatics and Cognitive Computing. Piscataway: IEEE Press, 2012: 140-144. |
| [74] | CUI Z Y, WANG Y. UAV path planning based on multi-layer reinforcement learning technique[J]. IEEE Access, 2021, 9: 59486-59497. |
| [75] | YU J, GUO J, ZHANG X, et al. UAV path planning in dynamical environment: A novel ICACO-IDWA algorithm[J]. Mathematical Problems in Engineering, 2022, 2022: 1-16. |
| [76] | 吕超, 李慕宸, 欧家骏. 基于分层深度强化学习的无人机混合路径规划[J/OL]. 北京航空航天大学学报, 2023: 1-13. (2023-11-01). . |
| LYU C, LI M C, OU J J. Hybrid path planning of UAV based on hierarchical depth reinforcement learning[J/OL]. China Industrial Economics, 2023: 1-13. (2023-11-01). (in Chinese). | |
| [77] | YANG Q M, ZHANG J D, SHI G Q. Path planning for unmanned aerial vehicle passive detection under the framework of partially observable Markov decision process[C]∥2018 Chinese Control and Decision Conference (CCDC). Piscataway: IEEE Press, 2018: 3896-3903. |
| [78] | 王瑶, 任安虎, 任洋洋. 改进蚁群算法的无人机航迹规划[J]. 电光与控制, 2024, 31(4): 43-48. |
| WANG Y, REN A H, REN Y Y. An improved ant colony algorithm for UAV trajectory planning[J]. Electronics Optics & Control, 2024, 31(4): 43-48 (in Chinese). | |
| [79] | 黄鹤, 高永博, 茹锋, 等. 基于自适应黏菌算法优化的无人机三维路径规划[J]. 上海交通大学学报, 2023, 57(10): 1282-1291. |
| HUANG H, GAO Y B, RU F, et al. 3D path planning of UAV based on adaptive slime mould algorithm optimization[J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291 (in Chinese). | |
| [80] | 王康, 司鹏, 陈莉, 等. 基于改进沙猫群算法的无人机三维航迹规划[J]. 兵工学报, 2023, 44(11): 3382-3393. |
| WANG K, SI P, CHEN L, et al. 3D path planning of unmanned aerial vehicle based on enhanced sand cat swarm optimization algorithm[J]. Acta Armamentarii, 2023, 44(11): 3382-3393 (in Chinese). | |
| [81] | TU G T, JUANG J G. UAV path planning and obstacle avoidance based on reinforcement learning in 3D environments[J]. Actuators, 2023, 12(2): 57. |
| [82] | 解瑞云, 海本斋. 多策略鼠群优化算法的无人机三维航迹规划[J]. 机械设计与制造, 2024(9): 112-119. |
| XIE R Y, HAI B Z. Multi-strategy rat swarm optimizer for unmanned aerial vehicle 3D flight path planning[J]. Machinery Design & Manufacture, 2024(9): 112-119 (in Chinese). | |
| [83] | 雷耀麟, 丁文锐, 罗祎喆, 等. 无人机数据采集任务中的航迹与资源优化[J/OL]. 北京航空航天大学学报,1-14[2024-03-08]. . |
| LEI Y L, DING W R, LUO Y Z, et al. Trajectory planning and resource allocation methods in UAV data collection missions [J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 1-14[2024-03-08]. (in Chinese). | |
| [84] | SAFADI Y, FU R, QUAN Q, et al. Macroscopic fundamental diagrams for low-altitude air city transport[J]. Transportation Research Part C: Emerging Technologies, 2023, 152: 104141. |
| [1] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [2] | Qihui WU, Chao DONG, Ziye JIA, Can CUI, Simeng FENG, Fuhui ZHOU, Hua XIE. Networking and control mechanism for low-altitude intelligent networks [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(3): 28809-028809. |
| [3] | Yumei HU, Quan PAN, Bao DENG. A Fisher information based adaptive filtering algorithm for sensor trajectory planning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 629825-629825. |
| [4] | Zhe LIU, Xige ZHANG, Changzhu WEI, Naigang CUI. High-precision adaptive convex programming for reentry trajectories of suborbital vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729430-729430. |
| [5] | Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791-729791. |
| [6] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [7] | Xiaohan LIAO, Wenqiu QU, Chenchen XU, Hongbo HE, Junwei WANG, Weibo SHI. A review of urban air mobility and its new infrastructure low⁃altitude public routes [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 28521-028521-. |
| [8] | Gang LEI, Wei LUO, Yunshu LI, Canhui LAI. Optimization of reentry maneuver trajectory for hypersonic glide vehicles in multiple no-fly zones [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528769-528769. |
| [9] | Qilei GUO, Weimin SANG, Junjie NIU, Ye YUAN. UAV flight strategy considering icing risk under complex meteorological conditions [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 627518-627518. |
| [10] | RAN Qingbo, XIAO Hong, YANG Fuhong, DUAN Yugang. Trajectory planning algorithm for automatic wire laying on perforated surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 425602-425602. |
| [11] | SUN Yang, CHANG Min, BAI Junqiang. Trajectory planning and control for micro-quadrotor perching on vertical surface [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325756-325756. |
| [12] | XIE Hua, LI Zihong, YANG Lei, ZHU Yongwen, LIU Fangzi. Optimization of four-dimensional trajectory of city pair with limited capacity [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 325581-325581. |
| [13] | XU Guangtong, WANG Zhu, CAO Yan, SUN Jingliang, LONG Teng. Dynamic-priority-decoupled UAV swarm trajectory planning using distributed sequential convex programming [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(2): 325059-325059. |
| [14] | LI Yuhui, ZHAO Min, CHEN Qi, YAO Min, HE Ziyang. Combined trajectory planning of parafoil systems in complex environments [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(6): 324566-324566. |
| [15] | SUN Hao, SUN Qinglin, TENG Haishan, ZHOU Peng, CHEN Zengqiang. Trajectory planning for parafoil system considering dynamic constraints in complicated environment [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(3): 324301-324301. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341