Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (S2): 729791.doi: 10.7527/S1000-6893.2023.29791
• Swarm Intelligence and Cooperative Control • Previous Articles Next Articles
Zhenwei WANG1, Kai LIU1( ), Jian GUO2, Xiaopeng LIU2
), Jian GUO2, Xiaopeng LIU2
Received:2023-10-30
Revised:2023-11-21
Accepted:2023-12-15
Online:2023-12-25
Published:2023-12-25
Contact:
Kai LIU
E-mail:carsonliu@dlut.edu.cn
Supported by:CLC Number:
Zhenwei WANG, Kai LIU, Jian GUO, Xiaopeng LIU. A multi⁃UAVs and multi⁃USVs formation cooperative mechanism based on leader⁃follower strategy[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729791.

Fig.1
Process description of the multi-UAVs-multi-USVs cooperative mechanism


Fig.2
Formation based on hierarchical Leader-Follower structure


Fig.3
Double-layer grid map model


Fig.4
Geometric diagram of maximum turn radius at adjacent track segments


Fig.5
Illustration of grid map area code configuration


Fig.6
Introduction to genetic algorithm workflow


Fig.7
Cross-domain multi-system cooperative formation controller for unmanned systems

Table 1
Fuzzy rule
| NB | NM | NS | ZO | PS | PM | PB | ||
|---|---|---|---|---|---|---|---|---|
| NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PM/NM/NB | PS/NS/NB | ZO/ZO/NM | ZO/ZO/PS | |
| NM | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/ZO/ZO | |
| NS | PB/NB/ZO | PM/NM/NS | PM/NS/NM | PS/NS/NS | ZO/ZO/NS | NS/PS/NS | NS/PS/ZO | |
| ZO | PM/NM/ZO | PM/NM/NS | PS/NS/NS | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PS/ZO | |
| PS | PS/NS/ZO | PS/NS/ZO | ZO/ZO/ZO | NS/PS/ZO | NS/PS/ZO | NM/PM/ZO | NB/PB/ZO | |
| PM | PS/ZO/PB | ZO/ZO/NS | NS/PS/PS | NM/PS/PS | NM/PM/PS | NM/PB/PS | NB/PB/PB | |
| PB | ZO/ZO/PB | ZO/ZO/PM | NM/PS/PM | NM/PM/PS | NM/PM/PS | NB/PB/PS | NB/PB/PB | |
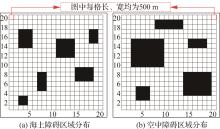
Fig.8
Information of established grid map

Table 2
Initial condition information for leader⁃UAV and leader⁃USV
| 初始条件 | 领导者 | |
|---|---|---|
| 领航机 | 领航艇 | |
| 1.6 | 1.6 | |
| 最小安全距离 | 100 | 100 |
| 领导者的安全距离 | 240 | 224 |
| 内侧编队间距 | 50 | 40 |
| 起始位置/m | (1 000,1 000) | (500,500) |
| 目标点/km | (10,10) | (10,10) |
| 2 | ||
| 规划速度范围/(m·s-1) | [ | [ |
| 最小转弯半径约束/m | 210 | 60 |
| 通信范围约束/km | 5 | 5 |
| 1.05 | 1.05 | |
| 0.9 | 0.9 | |

Fig.9
Algorithm fitness function iteration curves


Fig.10
Fitting results of cooperative trajectory planning for leader-UAV and leader-USV

Table 3
Trajectory information after fitting of trajectory planning results
| 航迹信息 | 数值 |
|---|---|
| 领航机航迹长度/km | 26.366 |
| 领航艇航迹长度/km | 14.236 |
| 航迹长度之比 | 1.852 1 |
| 最大通讯距离/km | 4.253 8 |
| 距离障碍区域的最小值/m | 335(UAV)/317(USV) |
Table 4
Leaders and followers information in UAV formations and USV formations
| 状态量类型 | 领航机 | 跟随机1 | 跟随机2 | 领航艇 | 跟随艇1 | 跟随艇2 |
|---|---|---|---|---|---|---|
| 起始位置/m | (1 000,1 000) | (450,550) | (540,460) | (500,500) | (970,1 030) | (1 030,970) |
| 编队前向,侧向间距/m | 40,30 | 40,-30 | 32,24 | 32,-24 | ||
| 初始速度/(m·s-1) | 32 | 31 | 31 | 15.5 | 14.5 | 14.5 |
| 初始航向角/rad | 1.570 8 | 0.85 | 0.85 | -0.079 4 | 0.85 | 0.85 |
| 速度范围/(m·s-1) | [ | [ | [ | 无 | [7.5,20] | [7.5,20] |
| 航向角范围/rad | [-π,π] | [-π,π] | [-π,π] | [-π,π] | [-π,π] | [-π,π] |
| 前向加速度范围/g | [-2,2] | [-2,2] | [-2,2] | [-0.75,0.75] | [-0.75,0.75] | |
| 侧向加速度范围/g | [-3,3] | [-3,3] | [-3,3] | [-0.5,0.5] | [-0.5,0.5] | [-0.5,0.5] |

Fig.11
Cooperative motion trajectories of UAV formation and USV formation


Fig.12
Control error information for Follower-UAV 1

Table 5
Other formation motion information
| 运动信息 | 数值 |
|---|---|
| 领航机-领航艇平均航程同步率/% | 99.83 |
| 领航机领航艇最大通讯距离/km | 4.155 |
| 无人机编队运动最小间距/m | 32.87 |
| 无人艇编队运动最小间距/m | 27.06 |

Fig.13
Control error information for Follower-UAV 2


Fig.14
Control error information for Follower-USV 1


Fig.15
Control error information for Follower-USV 2

| 1 | 刘雷, 刘大卫, 王晓光, 等. 无人机集群与反无人机集群发展现状及展望[J]. 航空学报, 2022, 43(S1): 726908. |
| LIU L, LIU D W, WANG X G, et al. Development status and prospect of UAV cluster and anti-UAV cluster[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(S1): 726908 (in Chinese). | |
| 2 | 何玉庆, 秦天一, 王楠. 跨域协同:无人系统技术发展和应用新趋势[J]. 无人系统技术, 2021, 4(4): 1-13. |
| HE Y Q, QIN T Y, WANG N. Cross-domain collaboration: New trends in the development and application of unmanned systems technology[J]. Unmanned Systems Technology, 2021, 4(4): 1-13 (in Chinese). | |
| 3 | WU Y, LOW K H, LV C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target[J]. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6782-6787. |
| 4 | HUANG T, CHEN Z, GAO W, et al. A USV-UAV cooperative trajectory planning algorithm with hull dynamic constraints[J]. Sensors, 2023, 23(4): 1845. |
| 5 | KE C, CHEN H F. Cooperative path planning for air–sea heterogeneous unmanned vehicles using search-and-tracking mission[J]. Ocean Engineering, 2022, 262: 112020. |
| 6 | 白嘉琪, 王彦恺, 邢昊. 无人艇与四旋翼无人机固定时间异构编队控制[J]. 系统工程与电子技术, 2023, 45(4): 1152-1163. |
| BAI J Q, WANG Y K, XING H. Fixed-time heterogeneous formation control of unmanned boats and quadrotor unmanned aerial vehicle[J]. Systems Engineering and Electronics, 2023, 45(4): 1152-1163 (in Chinese). | |
| 7 | LIU H T, WENG P J, TIAN X H, et al. Distributed adaptive fixed-time formation control for UAV-USV heterogeneous multi-agent systems[J]. Ocean Engineering, 2023, 267: 113240. |
| 8 | KE C, CHEN H F, XIE L. Cross-domain fixed-time formation control for an air-sea heterogeneous unmanned system with disturbances[J]. Journal of Marine Science and Engineering, 2023, 11(7): 1336. |
| 9 | SHAO G M, MA Y, MALEKIAN R, et al. A novel cooperative platform design for coupled USV⁃UAV systems[J]. IEEE Transactions on Industrial Informatics, 2019, 15(9): 4913-4922. |
| 10 | LAPANDIĆ D, PERSSON L, DIMAROGONAS D V, et al. Aperiodic communication for MPC in autonomous cooperative landing [J]. IFAC-PapersOnLine, 2021, 54(6): 113-118. |
| 11 | LI W Z, GE Y, GUAN Z H, et al. Synchronized motion-based UAV–USV cooperative autonomous landing[J]. Journal of Marine Science and Engineering, 2022, 10(9): 1214. |
| 12 | 崔恺, 曾国奇, 林伟, 等. 一种基于图论的机场空域无人机流量控制方法[J]. 北京航空航天大学学报, 2020, 46(5): 978-987. |
| CUI K, ZENG G Q, LIN W, et al. Flow control method for UAV airport airspace based on graph theory[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 978-987 (in Chinese). | |
| 13 | 张哲, 吴剑, 代冀阳, 等. 基于改进A-Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41(7): 323692. |
| ZHANG Z, WU J, DAI J Y, et al. Fast penetration path planning for stealth UAV based on improved A-Star algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(7): 323692 (in Chinese). | |
| 14 | WANG J K, CHI W Z, LI C M, et al. Neural RRT*: Learning-based optimal path planning[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(4): 1748-1758. |
| 15 | HAN Y H, XIANG H Y, CAO J N, et al. Study on optimization of multi-UAV nucleic acid sample delivery paths in large cities under the influence of epidemic environment[J]. Journal of Ambient Intelligence and Humanized Computing, 2023, 14(6): 7593-7620. |
| 16 | 葛佳昊, 刘莉, 董欣心, 等. 基于动力学RRT*的自由漂浮空间机器人轨迹规划[J]. 航空学报, 2021, 42(1): 523877. |
| GE J H, LIU L, DONG X X, et al. Trajectory planning for free floating space robots based on kinodynamic RRT* [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523877 (in Chinese). | |
| 17 | 王庆禄, 吴冯国, 郑成辰, 等. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5): 1461-1468. |
| WANG Q L, WU F G, ZHENG C C, et al. UAV path planning based on optimized artificial potential field method[J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468 (in Chinese). | |
| 18 | 张菁, 何友, 彭应宁, 等. 基于神经网络和人工势场的协同博弈路径规划[J]. 航空学报, 2019, 40(3): 322493. |
| ZHANG J, HE Y, PENG Y N, et al. Neural network and artificial potential field based cooperative and adversarial path planning[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(3): 322493 (in Chinese). | |
| 19 | 刘鑫, 杨霄鹏, 刘雨帆, 等. 基于GA-OCPA学习系统的无人机路径规划方法[J]. 航空学报, 2017, 38(11): 321275. |
| LIU X, YANG X P, LIU Y F, et al. UAV path planning based on GA-OCPA learning system[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(11): 321275 (in Chinese). | |
| 20 | SINGH M K, CHOUDHARY A, GULIA S, et al. Multi-objective NSGA-II optimization framework for UAV path planning in an UAV-assisted WSN[J]. The Journal of Supercomputing, 2023, 79(1): 832-866. |
| 21 | 魏彤, 龙琛. 基于改进遗传算法的移动机器人路径规划[J]. 北京航空航天大学学报, 2020, 46(4): 703-711. |
| WEI T, LONG C. Path planning for mobile robot based on improved genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 703-711 (in Chinese). | |
| 22 | 李宪强, 马戎, 张伸, 等. 蚁群算法的改进设计及在航迹规划中的应用[J]. 航空学报, 2020, 41(S2): 724381. |
| LI X Q, MA R, ZHANG S, et al. Improved design of ant colony algorithm and its application in route planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724381 (in Chinese). | |
| 23 | LI G X, LIU C, WU L, et al. A mixing algorithm of ACO and ABC for solving path planning of mobile robot[J]. Applied Soft Computing, 2023, 148: 110868. |
| 24 | YU Z H, SI Z J, LI X B, et al. A novel hybrid particle swarm optimization algorithm for path planning of UAVs[J]. IEEE Internet of Things Journal, 2022, 9(22): 22547-22558. |
| 25 | LIU Y, ZHANG X J, ZHANG Y, et al. Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach[J]. Chinese Journal of Aeronautics, 2019, 32(6): 1504-1519. |
| 26 | 阚平, 姜兆亮, 刘玉浩, 等. 多植保无人机协同路径规划[J]. 航空学报, 2020, 41(4): 323610. |
| KAN P, JIANG Z L, LIU Y H, et al. Cooperative path planning for multi-sprayer-UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 323610 (in Chinese). | |
| 27 | ZHANG M H, HAN Y H, CHEN S Y, et al. A Multi-Strategy Improved Differential Evolution algorithm for UAV 3D trajectory planning in complex mountainous environments[J]. Engineering Applications of Artificial Intelligence, 2023, 125: 106672. |
| 28 | 王晶, 顾维博, 窦立亚. 基于Leader-Follower的多无人机编队轨迹跟踪设计[J]. 航空学报, 2020, 41(S1): 723758. |
| WANG J, GU W B, DOU L Y. Trajectory tracking design of multi-UAV formation based on Leader-Follower[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723758 (in Chinese). | |
| 29 | CHEN H, WANG X K, SHEN L C, et al. Formation flight of fixed-wing UAV swarms: A group-based hierarchical approach[J]. Chinese Journal of Aeronautics, 2021, 34(2): 504-515. |
| 30 | LI J C, LIU J M, HUANGFU S Q, et al. Leader-follower formation of light-weight UAVs with novel active disturbance rejection control[J]. Applied Mathematical Modelling, 2023, 117: 577-591. |
| 31 | 杨明月, 寿莹鑫, 唐勇, 等. 多四旋翼无人机编队保持与避碰控制[J]. 航空学报, 2022, 43(S1): 726913. |
| YANG M Y, SHOU Y X, TANG Y, et al. Formation maintenance and collision avoidance control of multi-quadrotor UAV[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(S1): 726913 (in Chinese). | |
| 32 | 李正平, 鲜斌. 基于虚拟结构法的分布式多无人机鲁棒编队控制[J]. 控制理论与应用, 2020, 37(11): 2423-2431. |
| LI Z P, XIAN B. Robust distributed formation control of multiple unmanned aerial vehicles based on virtual structure[J]. Control Theory & Applications, 2020, 37(11): 2423-2431 (in Chinese). | |
| 33 | 徐博, 张大龙. 基于量子行为鸽群优化的无人机紧密编队控制[J]. 航空学报, 2020, 41(8): 323722. |
| XU B, ZHANG D L. Tight formation flight control of UAVs based on pigeon inspired algorithm optimization by quantum behavior[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(8): 323722 (in Chinese). | |
| 34 | TAN G G, ZHUANG J Y, ZOU J, et al. Coordination control for multiple unmanned surface vehicles using hybrid behavior-based method[J]. Ocean Engineering, 2021, 232: 109147. |
| 35 | 向乾, 张晓辉, 王正平, 等. 适用无人机的小型燃料电池控制方法[J]. 航空学报, 2021, 42(3): 623960. |
| XIANG Q, ZHANG X H, WANG Z P, et al. Control method of small fuel cells for UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(3): 623960 (in Chinese). | |
| 36 | PUSSENTE G A N, DE AGUIAR E P, MARCATO A L M, et al. UAV power line tracking control based on a type-2 fuzzy-PID approach[J]. Robotics, 2023, 12(2): 60. |
| [1] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [2] | Zhicheng ZHANG, Yuan ZHOU, Yu ZHAO, Weimin BAO. Cooperative formation control for multi-satellite system applied to distributed prescribed-time networking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(4): 330932-330932. |
| [3] | Xunliang YAN, Yuxuan YANG, Jiawei SHI, Peichen WANG. Rapid ascent-phase trajectory planning for near-optimal fuel consumption of RBCC vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 231876-231876. |
| [4] | Chen WANG, Caisheng WEI, Zeyang YIN, Kai JIN, Xingchen LI. Collaborative planning of multi-UAV trajectories and communication strategies considering channel resource constraints [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(18): 331837-331837. |
| [5] | Xunliang YAN, Peichen WANG, Yang GUO. Review of trajectory planning and guidance methods for entry glide maneuvering penetration [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331810-331810. |
| [6] | Jianye SUN, Dong YE, Yan XIAO. Active observation trajectory planning for non-cooperative spacecraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331587-331587. |
| [7] | Yu WANG, Zhipeng XIE, Yongjian TIAN, Guanglei MENG. Distributed UAV formation control with virtual structure guided reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(15): 331354-331354. |
| [8] | Zijie YU, Zheng ZHENG, Qingdong LI, Lin GUO, Suping REN, Jian GUO. Trajectory planning for solar-powered UAVs based on deep reinforcement learning [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 331420-331420. |
| [9] | Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879-530879. |
| [10] | Ziyi ZONG, Xin DONG, Zhan TU, Jinwu XIANG. Countermeasures against uncooperative drones based on swarm encirclement [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531349-531349. |
| [11] | Junzhi LI, Teng LONG, Jingliang SUN, Hongyu MIAO, Zhenlin ZHOU. Differential flatness-based spatial-temporal hierarchical trajectory planning for fixed-wing UAVs in urban environments [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531369-531369. |
| [12] | Weicheng DI, Jinkui XU, Zixing WEI, Jinwu XIANG, Zhan TU. Aerial-ground heterogeneous cooperation based on multi-round task allocation method [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531348-531348. |
| [13] | Yumei HU, Quan PAN, Bao DENG. A Fisher information based adaptive filtering algorithm for sensor trajectory planning [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 629825-629825. |
| [14] | Chuangxin ZHAO, Haojian TI, Zhaohong LI, Shan FENG, Shuxing YANG, Peng TANG. Multi⁃UAV cooperative formation control and flight test verification [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 530249-530249. |
| [15] | Jiang ZHAO, Xuan ZHANG, Pei CHI, Yingxun WANG. Self⁃adaptive formation control and dynamic path planning for air⁃ground heterogeneous swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809-329809. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341