Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (15): 528494-528494.doi: 10.7527/S1000-6893.2023.28494
• Flight Mechanics and Guidance Control • Previous Articles Next Articles
Hao ZHANG1, Peng WANG1( ), Guojian TANG1, Weimin BAO2
), Guojian TANG1, Weimin BAO2
Received:2023-01-10
Revised:2023-02-16
Accepted:2023-03-13
Online:2023-08-15
Published:2023-03-31
Contact:
Peng WANG
E-mail:wonderful2035@163.com
CLC Number:
Hao ZHANG, Peng WANG, Guojian TANG, Weimin BAO. Event-triggered fast finite time control for hypersonic morphing vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528494-528494.
Fig.1
Commands and responses of attitude angles
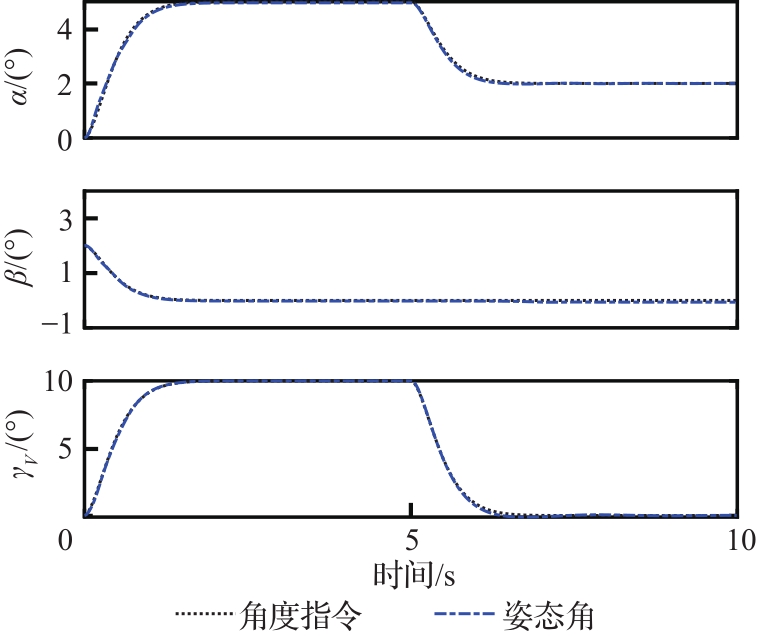
Fig.2
Curves of angular rates
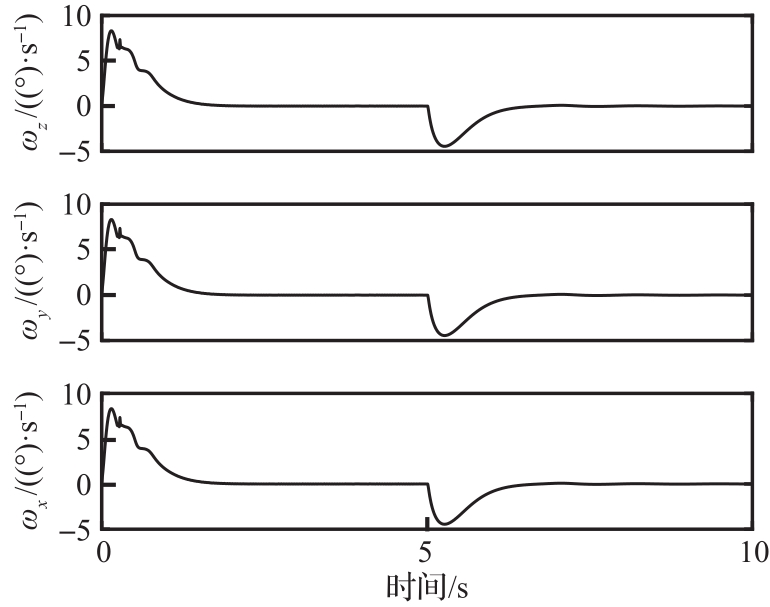
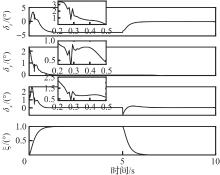
Fig.3
Curves of elevators and morphing rate
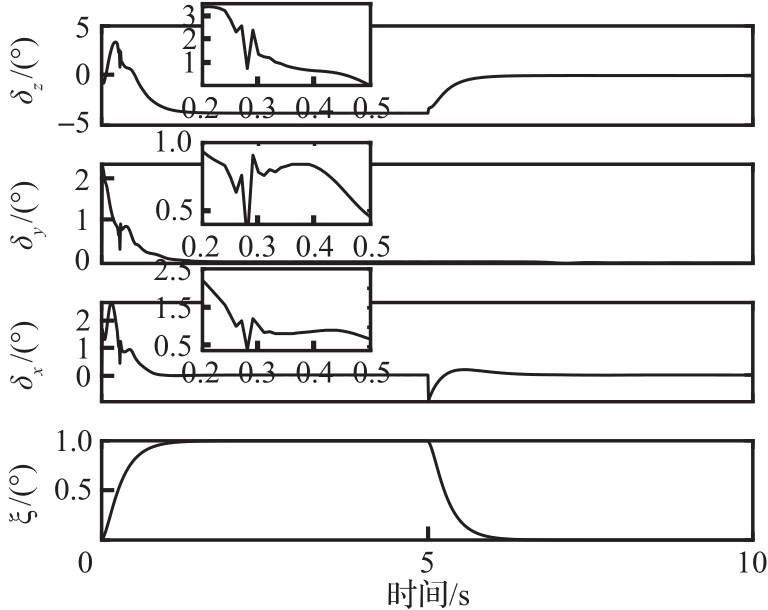
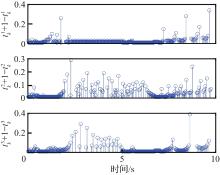
Fig.4
Event triggering time instants
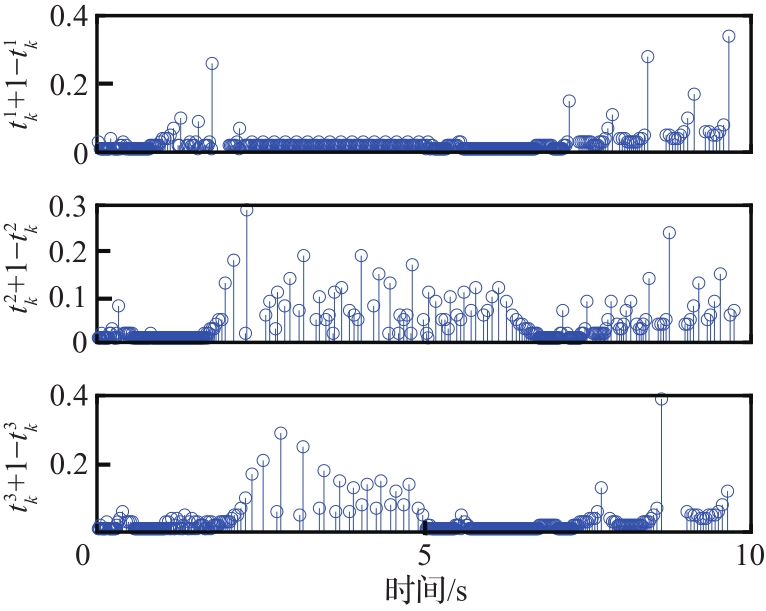
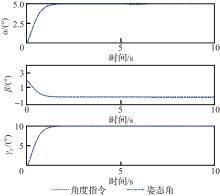
Fig.5
Responses of attitude angles
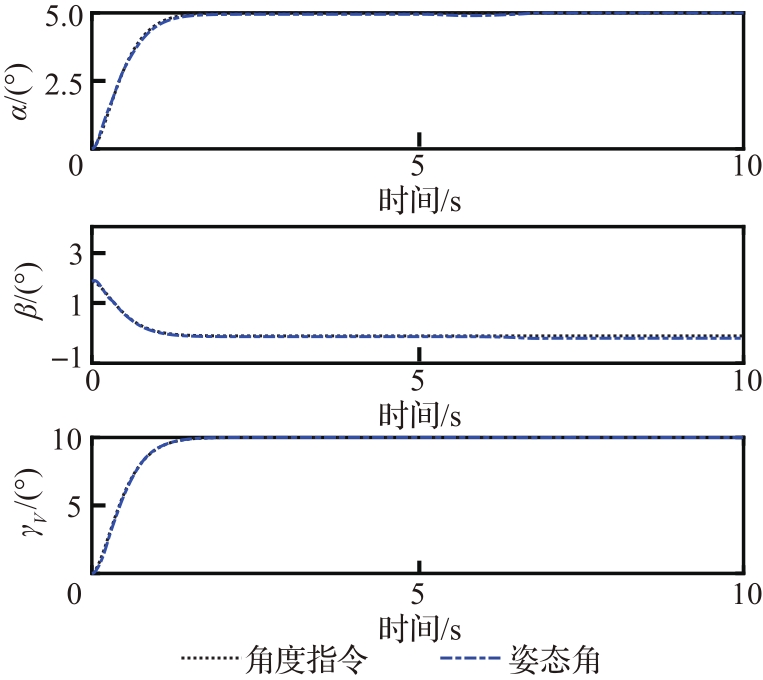
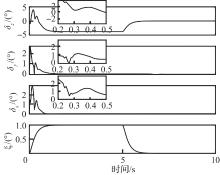
Fig.6
Control inputs and morphing rate
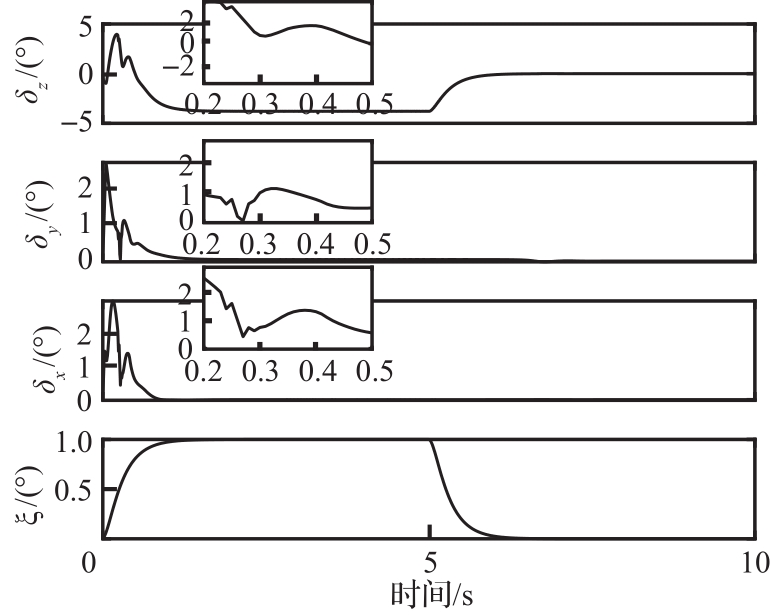
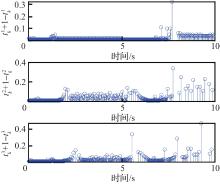
Fig.7
Events triggering instants with constraints
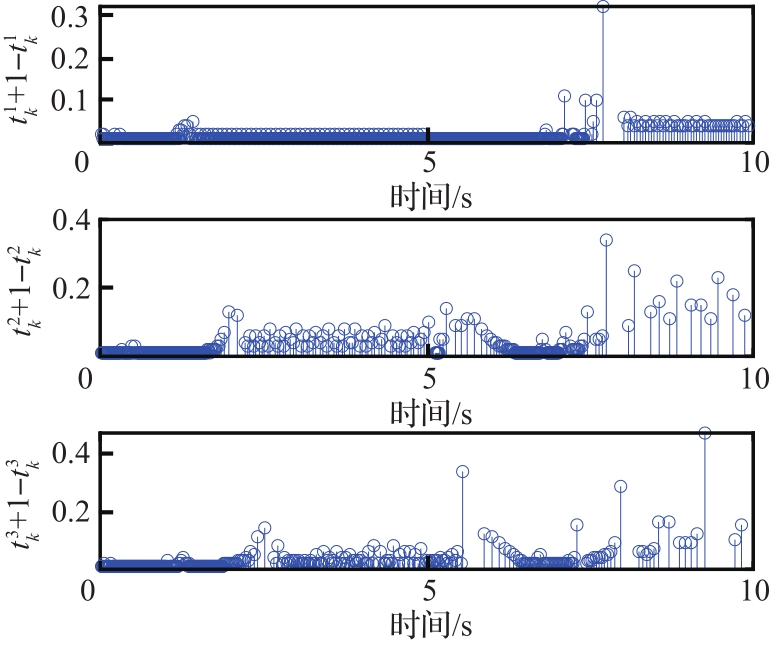
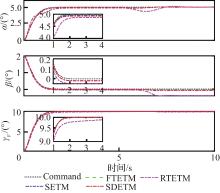
Fig.8
Responses of attitude angles with different methods
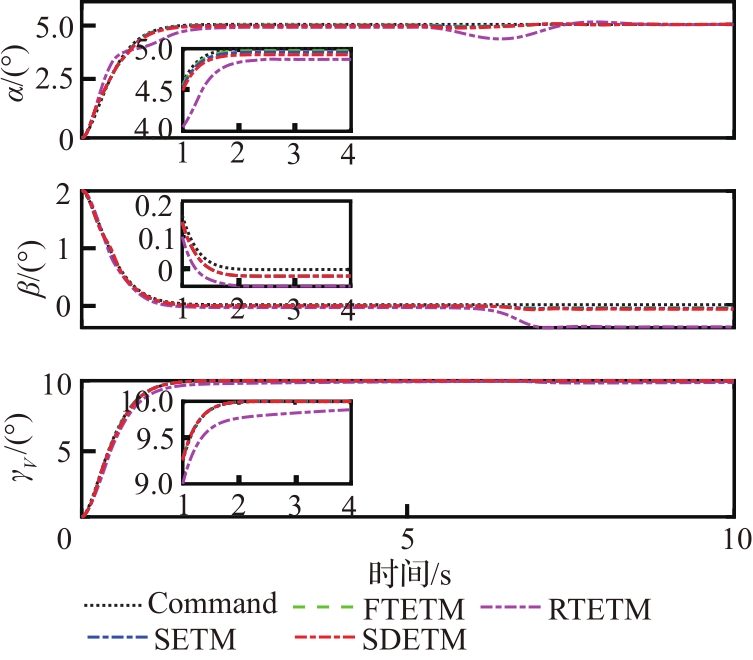
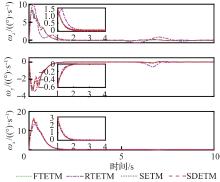
Fig.9
Responses of angular rates with different methods
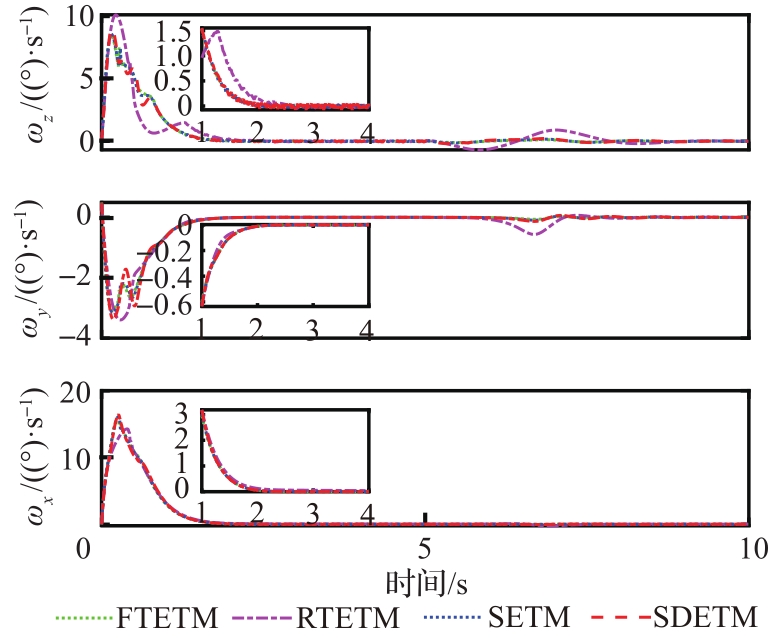
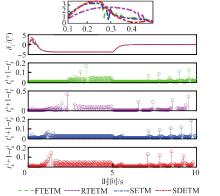
Fig.10
Control surface and triggering instants of pitch channel
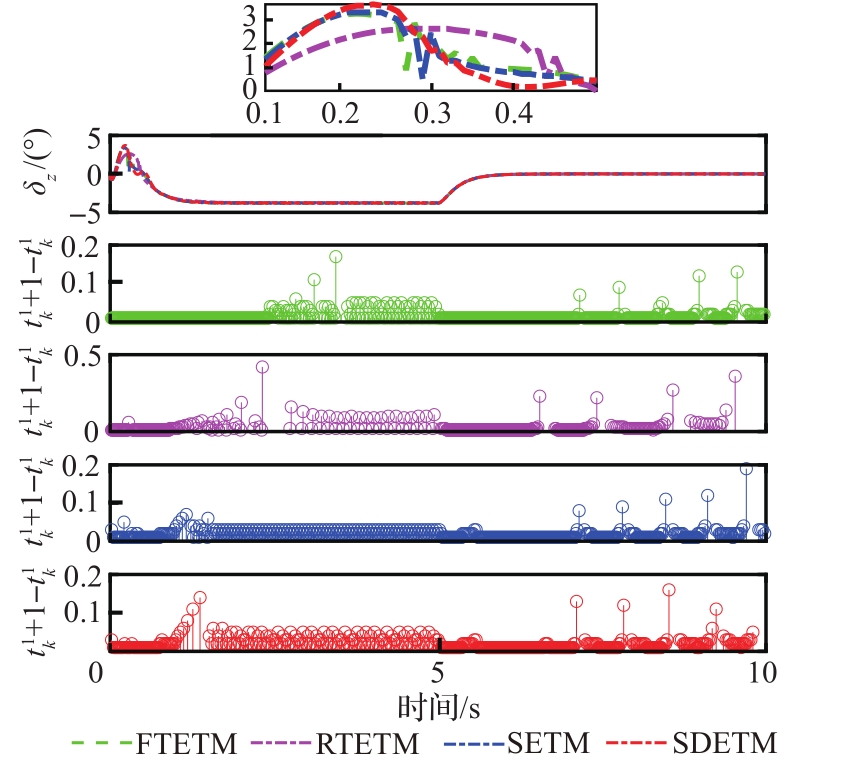

Fig.11
Control surface and triggering instants of yaw channel
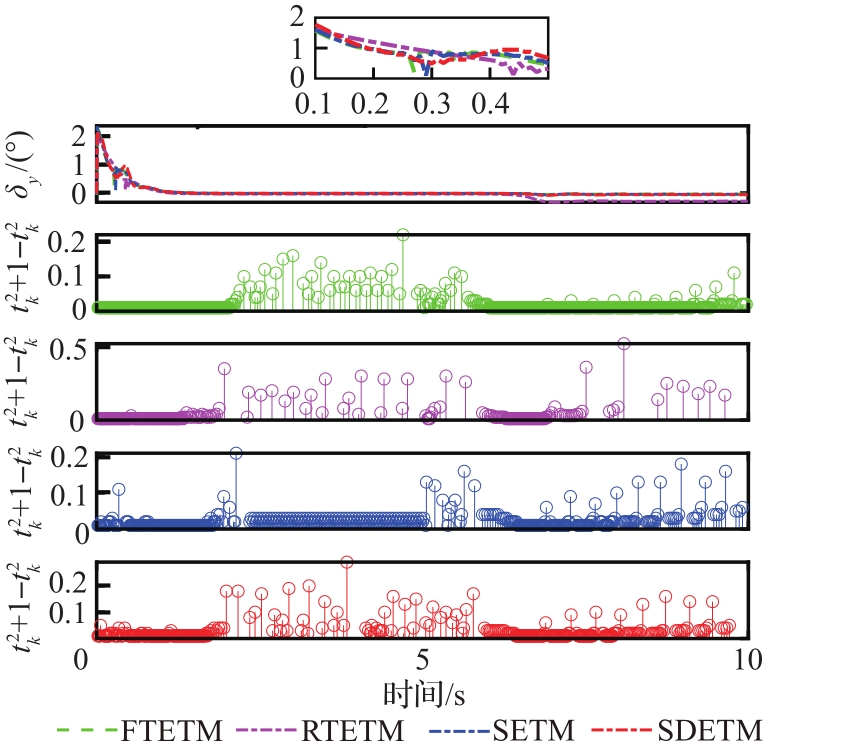
Fig.12
Control surface and triggering instants of roll channel
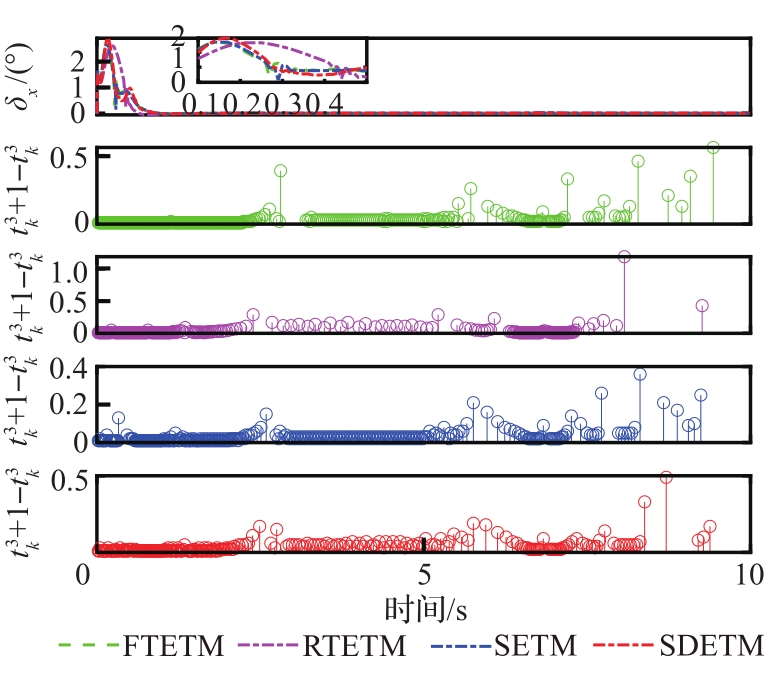
Table 1
Comparison of tracking accuracy of different triggering mechanisms
| 方法 | 攻角α/(°) | 侧滑角β/(°) | 倾侧角γ V/(°) |
|---|---|---|---|
| FTETM | 0.04 | -0.050 | 0 |
| RTETM | -0.05 | -0.390 | -0.130 |
| SETM | 0.03 | -0.063 | -0.001 |
| SDETM | 0.03 | -0.060 | -0.001 |
Table 2
Comparison of triggering times of different triggering mechanisms
| 方法 | 俯仰通道/次 | 偏航通道/次 | 滚转通道/次 |
|---|---|---|---|
| FTETM | 741 | 608 | 368 |
| RTETM | 403 | 284 | 266 |
| SETM | 584 | 461 | 334 |
| SDETM | 521 | 391 | 284 |
| 1 | BAO C Y, WANG P, TANG G J. Integrated method of guidance, control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics, 2021, 34(5): 535-553. |
| 2 | BAO C Y, WANG P, TANG G J. Integrated guidance and control for hypersonic morphing missile based on variable span auxiliary control[J]. International Journal of Aerospace Engineering, 2019, 2019: 1-20. |
| 3 | HU K Y, LI W H, CHENG Z A. Fuzzy adaptive fault diagnosis and compensation for variable structure hypersonic vehicle with multiple faults[J]. PLoS One, 2021, 16(8): e0256200. |
| 4 | HU K Y, YANG C X, SUN W J. Adaptive sliding mode fault compensation for sensor faults of variable structure hypersonic vehicle[J]. Sensors, 2022, 22(4): 1523. |
| 5 | LÜ X Z, YUAN C, BAO W M, et al. Numerical and experimental investigation of aerodynamic heat control of leading edge of hypersonic vehicle’s flexible skin[J].Science China Information Sciences, 2022, 65(10): 1-14. |
| 6 | DING Y B, YUE X K, CHEN G S, et al. Review of control and guidance technology on hypersonic vehicle[J]. Chinese Journal of Aeronautics, 2022, 35(7): 1-18. |
| 7 | CHU L L, LI Q, GU F, et al. Design, modeling, and control of morphing aircraft: A review[J]. Chinese Journal of Aeronautics, 2022, 35(5): 220-246. |
| 8 | 卢晓东, 张豪, 郭建国, 等. 高超声速飞行器滑模自适应迭代学习控制系统设计[J]. 西北工业大学学报, 2019, 37(6): 1120-1128. |
| LU X D, ZHANG H, GUO J G, et al. Iterative learning control combination with adaptive sliding mode technique for a hypersonic vehicle[J]. Journal of Northwestern Polytechnical University, 2019, 37(6):1120-1128 (in Chinese). | |
| 9 | 郭嘉宝, 赵长见, 宋志国. 一种基于动态逆-滑模的变形飞行器姿态控制方法研究[J]. 航天控制, 2022, 40(4): 12-17. |
| GUO J B, ZHAO C J, SONG Z G. A dynamic inverse-sliding mode based attitude control method for morphing aircraft[J]. Aerospace Control, 2022, 40(4): 12-17 (in Chinese). | |
| 10 | 路遥. 基于跟踪微分器的高超声速飞行器Backstepping控制[J]. 航空学报, 2021, 42(11):524737. |
| LU Y. Backstepping control for hypersonic flight vehicles based on tracking differentiator[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 524737 (in Chinese). | |
| 11 | 王忠森,廖宇新,魏才盛,等.高超声速飞行器快速终端滑模保性能容错控制[J/OL].航空学报(2023-03-21)[2023-03-22].. |
| WANG Z S, LIAO Y X, WEI C S, et al. Fault tolerant control of fast terminal sliding mode preserving performance of hypersonic vehicle[J/OL]. Acta Aeronautica et Astronautica Sinica (2023-03-21)[2023-03-22]. (in Chinese). | |
| 12 | 李政,于剑桥,赵新运.空空导弹敏捷转弯固定时间收敛滑模控制[J].航空学报,2023,44(8):327262. |
| LI Z, YU J Q, ZHAO X Y. Fixed-time convergent sliding mode control for agile turn of air-to-air missiles. Acta Aeronautica et Astronautica Sinica,2023,44(8):327262 (in Chinese). | |
| 13 | 刘继承, 江驹, 阴浩博, 等. 高超声速飞行器自适应固定时间抗饱和控制[J]. 哈尔滨工程大学学报, 2022, 43(7)1013-1022. |
| LIU J C, JIANG J, YIN H B, et al. Fixed-time antisaturation adaptive control of a hypersonic vehicle[J]. Journal of Harbin Engineering University, 2022, 43(7)1013-1022 (in Chinese). | |
| 14 | 魏启钊, 齐瑞云, 姜斌. 非最小相位高超声速飞行器自适应鲁棒容错控制[J]. 西北工业大学学报, 2021, 39(S1): 1-9. |
| WEI Q Z, QI R Y, JIANG B. Robust adaptive fault tolerant control for non-minimum phase hypersonic vehicle[J]. Journal of Northwestern Polytechnical University, 2021, 39(S1): 1-9 (in Chinese). | |
| 15 | LIANG S, XU B, REN J R. Kalman-filter-based robust control for hypersonic flight vehicle with measurement noises[J]. Aerospace Science and Technology, 2021, 112: 106566. |
| 16 | LIU J C, JIANG J, YU C J, et al. Disturbance observer–based fixed-time robust control for constrained air-breathing hypersonic vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2022, 236(5): 957-974. |
| 17 | LV L, LIU X G, XIAO L, et al. A novel non-uniform optimal control approach for hypersonic cruise vehicle with waypoint and no-fly zone constraints[J]. International Journal of Systems Science, 2021, 52(13): 2704-2724. |
| 18 | SHI Y, WANG Z B. Onboard generation of optimal trajectories for hypersonic vehicles using deep learning[J]. Journal of Spacecraft and Rockets, 2021, 58(2): 400-414. |
| 19 | AN H, WU Q Q, WANG G, et al. Simplified longitudinal control of air-breathing hypersonic vehicles with hybrid actuators[J]. Aerospace Science and Technology, 2020, 104: 105936. |
| 20 | AN H, WU Q Q, WANG G, et al. Adaptive compound control of air-breathing hypersonic vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(6): 4519-4532. |
| 21 | WU T C, WANG H L, YU Y, et al. Quantized fixed-time fault-tolerant attitude control for hypersonic reentry vehicles[J]. Applied Mathematical Modelling, 2021, 98: 143-160. |
| 22 | 常璧麟, 龙离军, 程杨, 等. 多重事件触发机制下四旋翼飞行器的姿态跟踪控制[J]. 西安交通大学学报, 2022, 56(3): 206-214. |
| CHANG B L, LONG L J, CHENG Y, et al. Attitude tracking control of quadrotor aircraft under multi-event triggering mechanism[J]. Journal of Xi’an Jiaotong University, 2022, 56(3): 206-214 (in Chinese). | |
| 23 | 石永霞, 胡庆雷, 邵小东. 角速度受限下航天器姿态机动事件触发控制[J]. 中国科学(信息科学), 2022, 52(3): 506-520. |
| SHI Y X, HU Q L, SHAO X D. Event-triggered attitude maneuver control of spacecraft under angular velocity constraints[J]. Scientia Sinica (Informationis), 2022, 52(3): 506-520 (in Chinese). | |
| 24 | 王帅磊, 周绍磊, 祁亚辉, 等. 多航天器集中事件触发分组姿态协同控制[J]. 兵器装备工程学报, 2021, 42(4):183-187. |
| WANG S L, ZHOU S L, QI Y H, et al. Multi-spacecraft centralized event-triggered group attitude coordinated control[J]. Journal of Ordnance Equipment Engineering, 2021, 42(4):183-187 (in Chinese). | |
| 25 | LV M L, DE SCHUTTER B, BALDI S. Nonrecursive control for formation-containment of HFV swarms with dynamic event-triggered communication[J]. IEEE Transactions on Industrial Informatics, 2023, 19(3): 3188-3197. |
| 26 | CAO Z R, JIA T G, NIU Y G. Self-triggered sliding mode control for digital fly-by-wire aircraft system[J]. Journal of the Franklin Institute, 2020, 357(15): 10492-10512. |
| 27 | SHI Y, SHAO X L. Neural adaptive appointed-time control for flexible air-breathing hypersonic vehicles: An event-triggered case[J].Neural Computing and Applications, 2021, 33(15): 9545-9563. |
| 28 | AN H, GUO Z Y, WANG G, et al. Neural adaptive control of air-breathing hypersonic vehicles robust to actuator dynamics[J]. ISA Transactions, 2021, 116: 17-29. |
| [1] | Yuqing QIU, Yan LI, Jinxi LANG, Yuxian LIU, Zhong WANG. Robust adaptive attitude control of high-speed helicopters in transition mode [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529927-529927. |
| [2] | Leyan FANG, Han MENG, Mingzhe HOU. Iterative learning sliding mode control with precise parameter estimation and its application [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628889-628889. |
| [3] | Guangquan DUAN, Guoping LIU. Adaptive prescribed control of position and attitude of combined spacecraft based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628837-628837. |
| [4] | Bing XIAO, Haichao ZHANG. Reinforcement learning robust optimal control for spacecraft attitude stabilization [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628890-628890. |
| [5] | Chao DUAN, Xiaodong SHAO, Qinglei HU, Huaining WU. Attitude tracking of underactuated spacecraft based on transverse function [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628910-628910. |
| [6] | Chenyang LIU, Dawei WU, Yize GUO, Xinsai LV, Jiani ZHOU, Shuyi SHAO. Robust adaptive attitude control of quadrotor with uncertain strong coupling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645-727645. |
| [7] | Xinyu HOU, Fan ZHANG, Panfeng HUANG, Xiaofei MA, Jialong ZHU, Yang LI. Integrated attitude and vibration control of space large antenna with truss [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727552-727552. |
| [8] | Zheng LI, Jianqiao YU, Xinyun ZHAO. Fixed⁃time convergent sliding mode control for agile turn of air⁃to⁃air missiles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327262-327262. |
| [9] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [10] | Shihao XU, Yingzi GUAN, Jialun PU, Changzhu WEI. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326857-326857. |
| [11] | Zhongsen WANG, Yuxin LIAO, Caisheng WEI, Ting DAI. Fast terminal sliding mode fault⁃tolerant control of hypersonic vehicle with guaranteed performance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476-328476. |
| [12] | Linkun HE, Wenchao XUE, Ran ZHANG, Huifeng LI. Guidance and control for powered descent and landing of launch vehicles: Overview and outlook [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(23): 628462-628462. |
| [13] | Bo LIU, Zhongjie MENG. Tanker/UAV formation tracking control with hose connection constraints [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328210-328210. |
| [14] | Chuang XU, Baolin WU. Distributed fixed-time output-feedback attitude consensus control for multiple spacecraft with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327465-327465. |
| [15] | Zikang SU, Zhongnan XU, Chuntao LI, Haitong CHEN, Honglun WANG. Modeling and docking control of UAV aerial recovery in form of telescopic boom [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 326315-326315. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 345
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 700
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341