Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (1): 628889-628889.doi: 10.7527/S1000-6893.2023.28889
• Special Topic: Fully Actuated System Theory and Its Applications in Aerospace Field • Previous Articles Next Articles
Leyan FANG, Han MENG, Mingzhe HOU( )
)
Received:2023-04-19
Revised:2023-06-05
Accepted:2023-07-17
Online:2024-01-15
Published:2023-07-21
Contact:
Mingzhe HOU
E-mail:hithyt@hit.edu.cn
Supported by:CLC Number:
Leyan FANG, Han MENG, Mingzhe HOU. Iterative learning sliding mode control with precise parameter estimation and its application[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628889-628889.
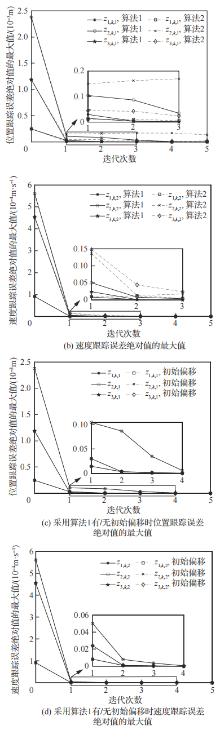
Fig.1
Maximum of absolute values of position and speed tracking errors under identical initial condition


Fig.2
Maximum of absolute values of parameter estimation errors under identical initial condition
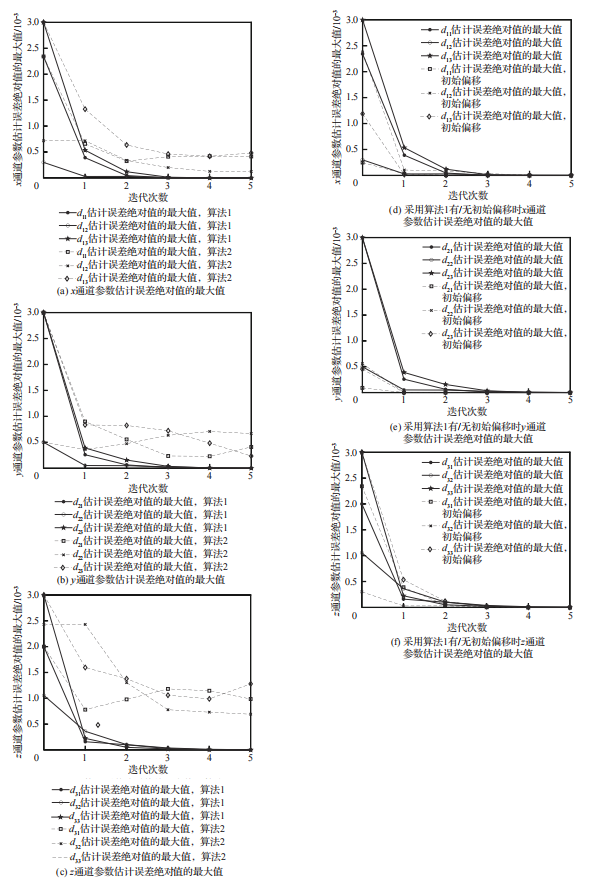

Fig.3
Curves of control inputs of Algorithm 1 under identical initial condition
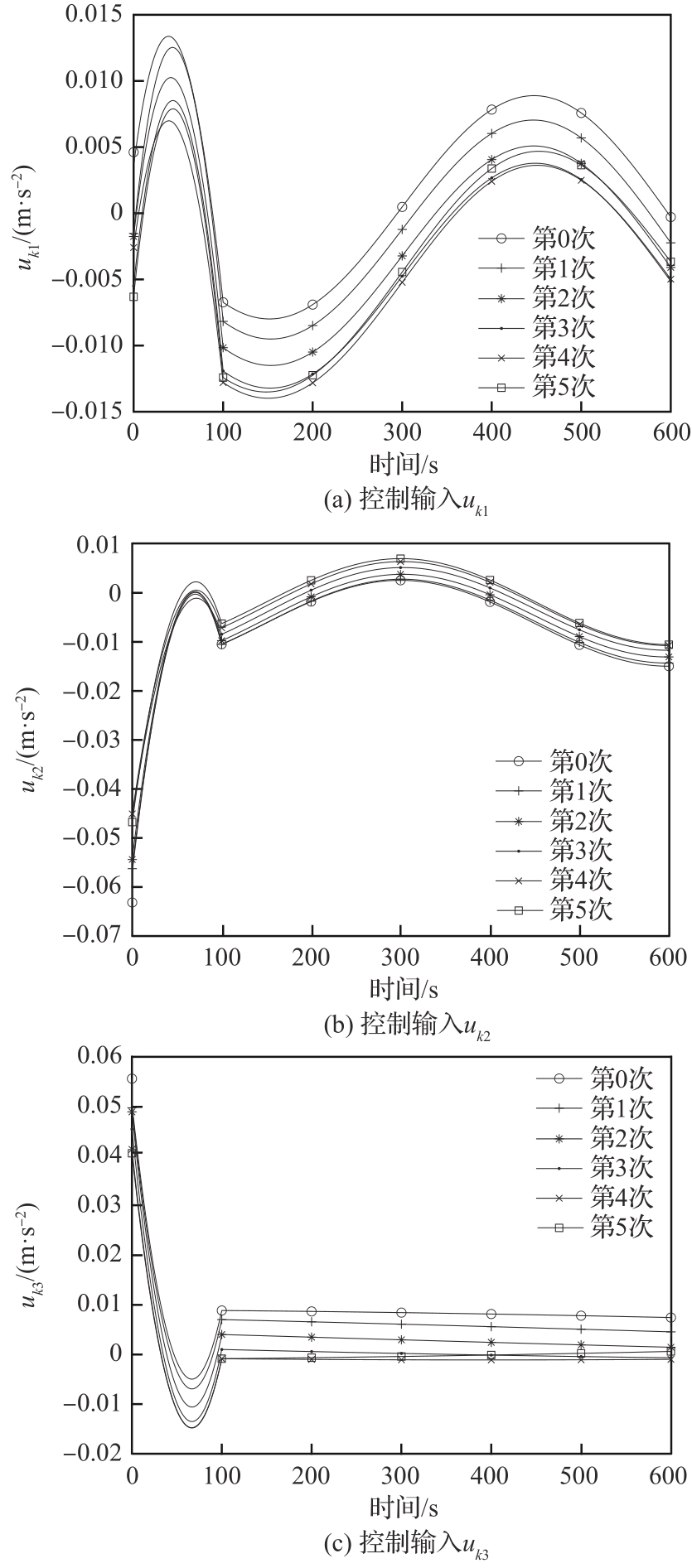

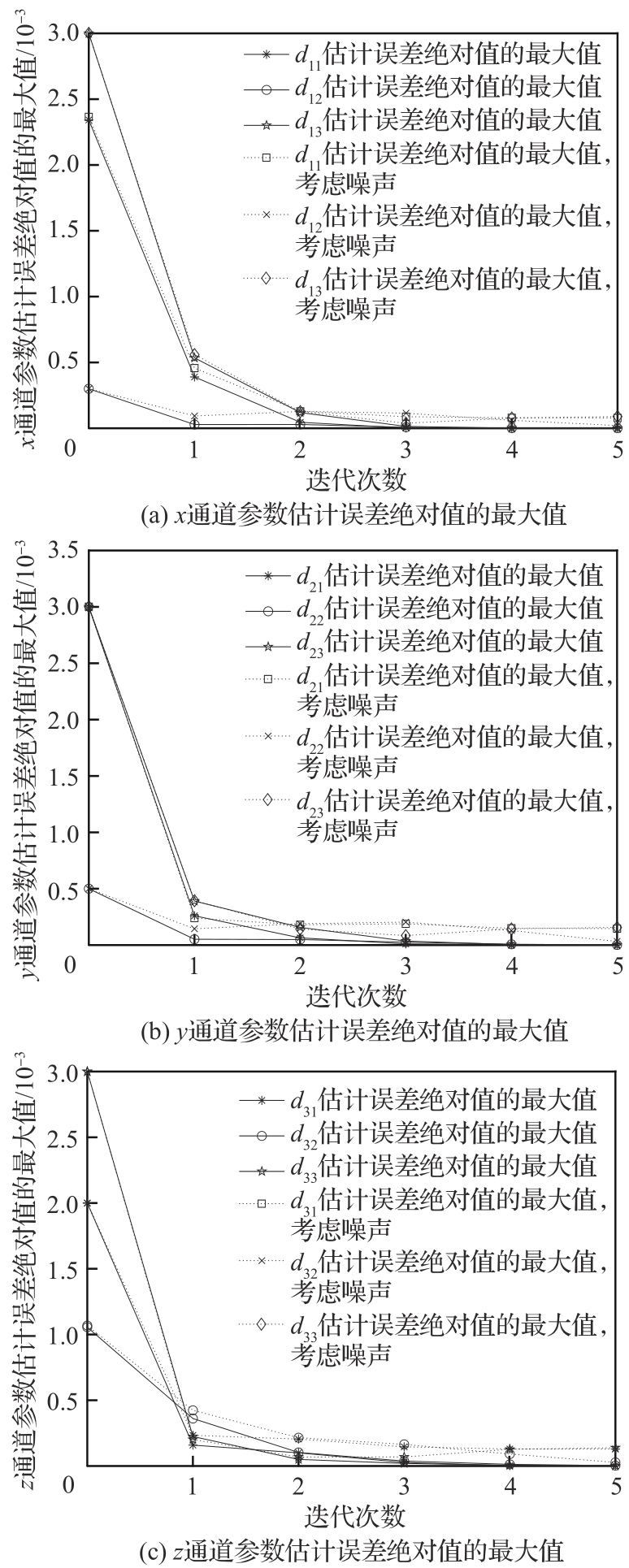
Fig.4
Maximum of absolute values of parameter estimation errors with and without measurement noise under identical initial condition when utilizing Algorithm 1


Fig.5
Maximum of absolute values of position and speed tracking errors under alignment condition

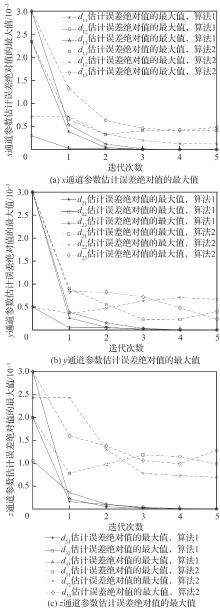
Fig.6
Maximum of absolute values of parameter estimation errors under alignment condition


Fig.7
Curves of control inputs of Algorithm 1 under alignment condition
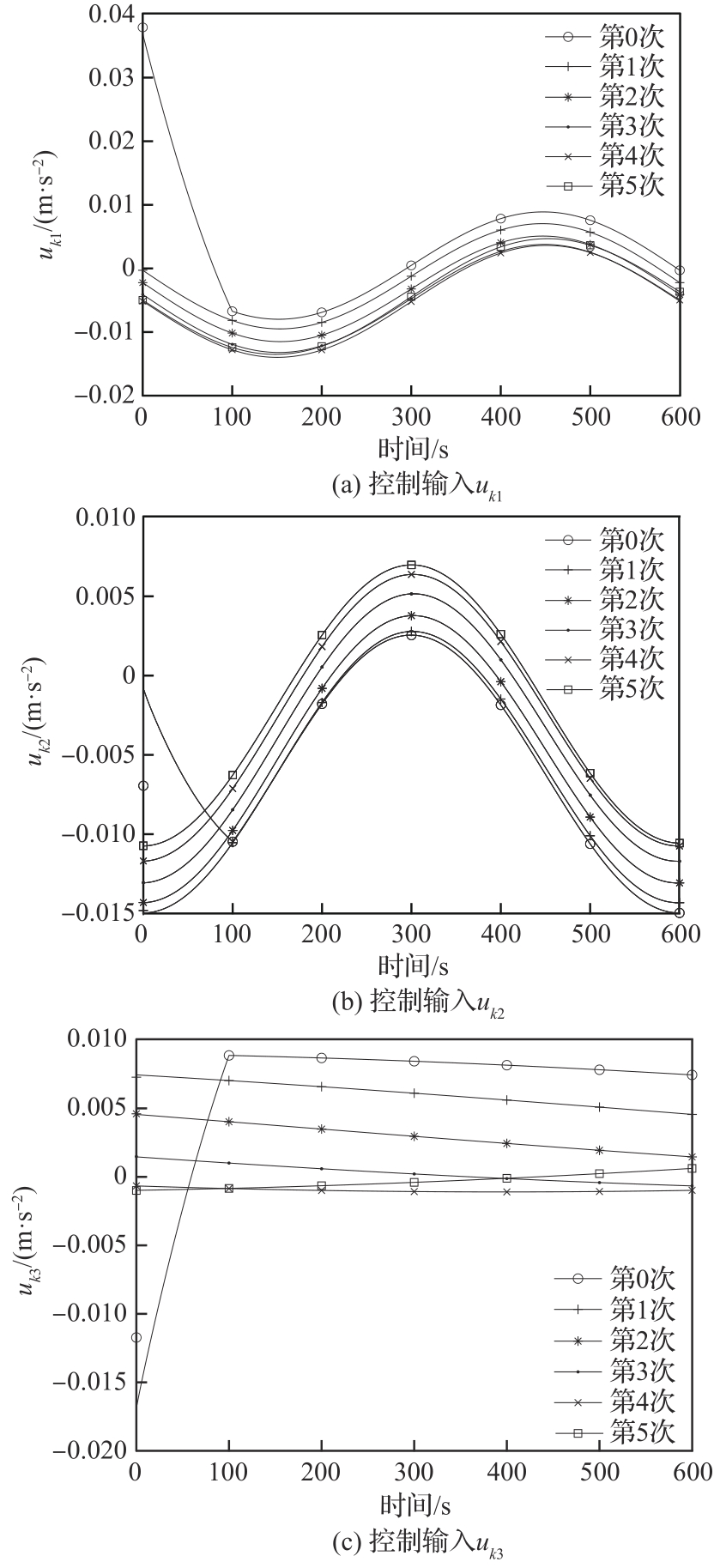
Fig.8
Maximum of absolute values of parameter estimation errors with and without measurement noise under alignment condition when utilizing Algorithm 1
| 1 | LONG J T, WU F. Iterative-learning-control-based tracking for asteroid close-proximity operations[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(5): 1195-1203. |
| 2 | WU B L, WANG D W, POH E K. High precision satellite attitude tracking control via iterative learning control[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(3): 528-534. |
| 3 | HE W, MENG T T, HE X Y, et al. Iterative learning control for a flapping wing micro aerial vehicle under distributed disturbances[J]. IEEE Transactions on Cybernetics, 2019, 49(4): 1524-1535. |
| 4 | FRENCH M, ROGERS E. Nonlinear iterative learning by an adaptive Lyapunov technique[C]∥Proceedings of the 37th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 1998: 175-180. |
| 5 | FRENCH M, ROGERS E. Non-linear iterative learning by an adaptive Lyapunov technique[J]. International Journal of Control, 2000, 73(10): 840-850. |
| 6 | ZHANG C L, LI J M. Adaptive iterative learning control of non-uniform trajectory tracking for strict feedback nonlinear time-varying systems with unknown control direction[J]. Applied Mathematical Modelling, 2015, 39(10/11): 2942-2950. |
| 7 | WEI J M, ZHANG Y A, BAO H. An exploration on adaptive iterative learning control for a class of commensurate high-order uncertain nonlinear fractional order systems[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 5(2): 618-627. |
| 8 | XU J X, TAN Y. A composite energy function-based learning control approach for nonlinear systems with time-varying parametric uncertainties[J]. IEEE Transactions on Automatic Control, 2002, 47(11): 1940-1945. |
| 9 | BU X H, HOU Z S. Adaptive iterative learning control for linear systems with binary-valued observations[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(1): 232-237. |
| 10 | YU Q X, HOU Z S. Adaptive fuzzy iterative learning control for high-speed trains with both randomly varying operation lengths and system constraints[J]. IEEE Transactions on Fuzzy Systems, 2021, 29(8): 2408-2418. |
| 11 | CHEN Y, HUANG D Q, QIN N, et al. Adaptive iterative learning control for a class of nonlinear strict-feedback systems with unknown state delays[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(9): 6416-6427. |
| 12 | TAYEBI A, CHIEN C J. A unified adaptive iterative learning control framework for uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2007, 52(10): 1907-1913. |
| 13 | CHIEN C J, TAYEBI A. Further results on adaptive iterative learning control of robot manipulators[J]. Automatica, 2008, 44(3): 830-837. |
| 14 | CHIEN C J. A combined adaptive law for fuzzy iterative learning control of nonlinear systems with varying control tasks[J]. IEEE Transactions on Fuzzy Systems, 2008, 16(1): 40-51. |
| 15 | ORTEGA R, NIKIFOROV V, GERASIMOV D. On modified parameter estimators for identification and adaptive control. A unified framework and some new schemes[J]. Annual Reviews in Control, 2020, 50: 278-293. |
| 16 | XU J X, YAN R. On initial conditions in iterative learning control[J]. IEEE Transactions on Automatic Control, 2005, 50(9): 1349-1354. |
| 17 | SUN M X, YAN Q Z. Error tracking of iterative learning control systems[J]. Acta Automatica Sinica, 2013, 39(3): 251-262. |
| 18 | CHEN J Y. Adaptive iterative learning backstepping control for nonlinear strict-feedback systems[C]∥2020 IEEE 9th Data Driven Control and Learning Systems Conference. Piscataway: IEEE Press, 2020: 1054-1059. |
| 19 | CHEN Q, SHI H H, SUN M X. Echo state network-based backstepping adaptive iterative learning control for strict-feedback systems: An error-tracking approach[J]. IEEE Transactions on Cybernetics, 2020, 50(7): 3009-3022. |
| 20 | 段广仁. 高阶系统方法: I.全驱系统与参数化设计[J]. 自动化学报, 2020, 46(7): 1333-1345. |
| DUAN G R. High-order system approaches: I. Fully-actuated systems and parametric designs[J]. Acta Automatica Sinica, 2020, 46(7): 1333-1345 (in Chinese). | |
| 21 | 段广仁. 高阶系统方法: II. 能控性与全驱性[J]. 自动化学报, 2020, 46(8): 1571-1581. |
| DUAN G R. High-order system approaches: II. Controllability and full-actuation[J]. Acta Automatica Sinica, 2020, 46(8): 1571-1581 (in Chinese). | |
| 22 | 段广仁. 高阶系统方法: III. 能观性与观测器设计[J]. 自动化学报, 2020, 46(9): 1885-1895. |
| DUAN G R. High-order system approaches: III. Observability and observer design[J]. Acta Automatica Sinica, 2020, 46(9): 1885-1895 (in Chinese). | |
| 23 | CAI M, HE X, ZHOU D H. An active fault tolerance framework for uncertain nonlinear high-order fully-actuated systems[J]. Automatica, 2023, 152: 110969. |
| 24 | YU Y, LIU G P, HUANG Y, et al. Coordinated predictive secondary control for DC microgrids based on high-order fully actuated system approaches[J/OL]. IEEE Transactions on Smart Grid(2023-04-13)[2023-04-19]. . |
| 25 | XIAO F Z, CHEN L Q. Attitude control of spherical liquid-filled spacecraft based on high-order fully actuated system approaches[J]. Journal of Systems Science and Complexity, 2022, 35(2): 471-480. |
| 26 | DUAN G R. High-order fully actuated system approaches: Part IV. Adaptive control and high-order backstepping[J]. International Journal of Systems Science, 2021, 52(5): 972-989. |
| 27 | DUAN G R. High-order fully actuated system approaches: Part V. Robust adaptive control[J]. International Journal of Systems Science, 2021, 52(10): 2129-2143. |
| 28 | LIU W Z, DUAN G R, HOU M Z. High-order command filtered adaptive backstepping control for second-and high-order fully actuated strict-feedback systems[J]. Journal of the Franklin Institute, 2023, 360(6): 3989-4015. |
| 29 | MENG R, HUA C C, LI K, et al. Adaptive event-triggered control for uncertain high-order fully actuated system[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(11): 4438-4442. |
| 30 | LIU X Q, CHEN M Y, SHENG L, et al. Adaptive fault-tolerant control for nonlinear high-order fully-actuated systems[J]. Neurocomputing, 2022, 495: 75-85. |
| 31 | DUAN G R. High-order fully actuated system approaches: Part VII. Controllability, stabilisability and parametric designs[J]. International Journal of Systems Science, 2021, 52(14): 3091-3114. |
| 32 | ARANOVSKIY S, BOBTSOV A, ORTEGA R, et al. Parameters estimation via dynamic regressor extension and mixing[C]∥2016 American Control Conference. Piscataway: IEEE Press, 2016: 6971-6976. |
| 33 | HOU M Z, SHI W R, FANG L Y, et al. Adaptive dynamic surface control of high-order strict feedback nonlinear systems with parameter estimations[J]. Science China Information Sciences, 2022, 66(5): 159203. |
| 34 | 李敏,袁利,魏春岭. 基于混合状态机的航天器自主绕飞多模态控制[J]. 航空学报, 44(18): 328296. |
| LI M, YUAN L, WEI C L. Spacecraft autonomous fly-around multi-mode control based-on hybrid state machine[J]. Acta Aeronautica et Astronautica Sinica, 44(18): 328296 (in Chinese). | |
| 35 | 韩飞, 吴限德, 段广仁, 等. 逼近与跟踪翻滚目标的双滑模面姿轨耦合控制[J]. 哈尔滨工程大学学报, 2018, 39(1): 23-32. |
| HAN F, WU X D, DUAN G R, et al. Attitude and orbit coupled dual sliding-mode surface control for approaching and tracking tumbling target[J]. Journal of Harbin Engineering University, 2018, 39(1): 23-32 (in Chinese). |
| [1] | Fengying ZHENG, Zhimin SHEN, Yaqin LI, Kaizhao XU, Xinhua WANG. Gain adaptive multi-mode switching control for coaxial high-speed helicopter [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529088-529088. |
| [2] | Yuqing QIU, Yan LI, Jinxi LANG, Yuxian LIU, Zhong WANG. Robust adaptive attitude control of high-speed helicopters in transition mode [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(9): 529927-529927. |
| [3] | Kai NING, Baolin WU. Event-triggered-based orbit maintenance control for spacecraft subsatellite point control [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 329412-329412. |
| [4] | Guangquan DUAN, Guoping LIU. Adaptive prescribed control of position and attitude of combined spacecraft based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628837-628837. |
| [5] | Xinyu HOU, Fan ZHANG, Panfeng HUANG, Xiaofei MA, Jialong ZHU, Yang LI. Integrated attitude and vibration control of space large antenna with truss [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727552-727552. |
| [6] | Xiaoyun SUN, Shufan WU, Qiang SHEN. LMI-based output tracking robust drag-free control with model reference adaptive scheme [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727654-727654. |
| [7] | Runchang HU, Zian WANG, Yongliang CHEN, Dapeng ZHOU, Dapeng YANG, Zheng GONG. Stability augmentation control of thrust-vectored V/STOL aircraft based on L1 adaptive control [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727642-727642. |
| [8] | Chenyang LIU, Dawei WU, Yize GUO, Xinsai LV, Jiani ZHOU, Shuyi SHAO. Robust adaptive attitude control of quadrotor with uncertain strong coupling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 727645-727645. |
| [9] | Yajie MA, Juan WANG, Bin JIANG, Jianye GONG. A fault⁃tolerant control scheme for UAVs-UGVs formation systems [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327216-327216. |
| [10] | Zheng LI, Jianqiao YU, Xinyun ZHAO. Fixed⁃time convergent sliding mode control for agile turn of air⁃to⁃air missiles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(8): 327262-327262. |
| [11] | Yongzhi SHENG, Jiahao GAN, Chengxin ZHANG. Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 327073-327073. |
| [12] | Shihao XU, Yingzi GUAN, Jialun PU, Changzhu WEI. Predefined-time sliding mode control for VTHL launch vehicle in reentry phase [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(7): 326857-326857. |
| [13] | Zhongsen WANG, Yuxin LIAO, Caisheng WEI, Ting DAI. Fast terminal sliding mode fault⁃tolerant control of hypersonic vehicle with guaranteed performance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476-328476. |
| [14] | Bo LIU, Zhongjie MENG. Tanker/UAV formation tracking control with hose connection constraints [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(17): 328210-328210. |
| [15] | Feiyan GUO, Jianhua LIU, Qingdong XIAO, Shihong XIAO, Zhongqi WANG. Monitoring and evaluation of working condition and adaptive control technology for digital assembly tooling [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(16): 427914-427914. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 191
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 576
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341