| [1] |
REID T G R, HOUTS S E, CAMMARATA R, et al. Localization requirements for autonomous vehicles[J]. SAE International Journal of Connected and Automated Vehicles, 2019,2(3):173-190.
|
| [2] |
REID T G R, NEISH A, MANNING B. Localization & mapping requirements for level 2+ autonomous vehicles[C]∥Proceedings of the 2023 International Technical Meeting of The Institute of Navigation. Manassas :ION, 2023: 107-123.
|
| [3] |
IMO. Revised maritime policy and requirements for a future GNSS: A.925(22) [S]. London: IMO, 2001.
|
| [4] |
蒋爱国, 邹付兵, 刘晓林, 等. 北斗/GPS海上实时PPP完好性监测及性能分析[J]. 测绘通报, 2023(8): 97-101.
|
|
JIANG A G, ZOU F B, LIU X L, et al. BDS/GPS maritime real-time PPP integrity monitoring and performance analysis[J]. Bulletin of Surveying and Mapping, 2023(8): 97-101 (in Chinese).
|
| [5] |
HOU P Y, ZHA J P, LIU T, et al. Recent advances and perspectives in GNSS PPP-RTK[J]. Measurement Science and Technology, 2023, 34(5): 051002.
|
| [6] |
LI X X, HUANG J X, LI X, et al. Review of PPP-RTK: Achievements, challenges, and opportunities[J]. Satellite Navigation, 2022, 3(1): 28.
|
| [7] |
CAPUA R, PULLEN S, JOERGER M, et al. Development of RTCM SC-134 messages for high-integrity precise positioning[C]∥Proceedings of the 37th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2024). Manassas: ION, 2024: 654-668.
|
| [8] |
GAO Z, ZHAN X Q, YANG R. RTK ramp faults detection and exclusion by the hybrid control chart[J]. Advances in Space Research, 2024, 73(3): 2060-2079.
|
| [9] |
FENG S J, OCHIENG W, MOORE T, et al. Carrier phase-based integrity monitoring for high-accuracy positioning[J]. GPS Solutions, 2009, 13(1): 13-22.
|
| [10] |
BARFORD T, LACAMBRE J B, GREER R. Optimizing GNSS time-differenced carrier phase measurements for high-integrity inertial navigation GNSS sensor fusion without ambiguity resolution[C]∥2023 IEEE/ION Position, Location and Navigation Symposium (PLANS). Piscataway: IEEE Press, 2023: 793-804.
|
| [11] |
GAO Y T, JIANG Y, GAO Y, et al. Solution separation-based integrity monitoring for RTK positioning with faulty ambiguity detection and protection level[J]. GPS Solutions, 2023, 27(3): 140.
|
| [12] |
EL-MOWAFY A, XU B, HSU L T. Integrity monitoring using multi-GNSS pseudorange observations in the urban environment combining ARAIM and 3D city models[J]. Journal of Spatial Science, 2022, 67(1): 91-110.
|
| [13] |
WANG Z P, HOU X P, DAN Z Q, et al. Adaptive Kalman filter based on integer ambiguity validation in moving base RTK[J]. GPS Solutions, 2022, 27(1): 34.
|
| [14] |
VERHAGEN S, TEUNISSEN P J G. The ratio test for future GNSS ambiguity resolution[J]. GPS Solutions, 2013, 17(4): 535-548.
|
| [15] |
TEUNISSEN P J G, VERHAGEN S. The GNSS ambiguity ratio-test revisited: A better way of using it[J]. Survey Review, 2009, 41(312): 138-151.
|
| [16] |
KHANAFSEH S, PERVAN B. New approach for calculating position domain integrity risk for cycle resolution in carrier phase navigation systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(1): 296-307.
|
| [17] |
HOU Y Q, VERHAGEN S, WU J. An efficient implementation of fixed failure-rate ratio test for GNSS ambiguity resolution[J]. Sensors, 2016, 16(7): 945.
|
| [18] |
WU S W, PECK S R, FRIES R M, et al. Geometry extra-redundant almost fixed solutions: A high integrity approach for carrier phase ambiguity resolution for high accuracy relative navigation[C]∥2008 IEEE/ION Position, Location and Navigation Symposium. Piscataway: IEEE Press, 2008: 568-582.
|
| [19] |
RUWISCH F, SCHÖN S. Performance assessment of GNSS RTK positioning in urban environments: Outlier detection versus 3DMA-FDE[C]∥Proceedings of the 35th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2022). Manassas: ION, 2022: 2649-2663.
|
| [20] |
KARIMIDOONA A, SCHÖN S. Integrity monitoring of commercial RTK receivers in static open sky and kinematic urban environments scenarios[C]∥Proceedings of the 2022 International Technical Meeting of The Institute of Navigation. Manassas: INO, 2022: 819-34.
|
| [21] |
WANG K, EL-MOWAFY A, RIZOS C, et al. Integrity monitoring for horizontal RTK positioning: New weighting model and overbounding CDF in open-sky and suburban scenarios[J]. Remote Sensing, 2020, 12(7): 1173.
|
| [22] |
喻思琪, 张小红, 郭斐, 等. 卫星导航进近技术进展[J]. 航空学报, 2019, 40(3): 022200.
|
|
YU S Q, ZHANG X H, GUO F, et al. Recent advances in precision approach based on GNSS[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(3): 022200 (in Chinese).
|
| [23] |
LI R, ZHENG S Y, WANG E S, et al. Advances in BeiDou navigation satellite system (BDS) and satellite navigation augmentation technologies[J]. Satellite Navigation, 2020, 1(1): 12.
|
| [24] |
RTCA. Minimum operational performance standards (MOPS) for global positioning system/satellite-based augmentation system airborne equipment: RTCA DO-229 [S]. Washington, D.C.: RTCA, 2020.
|
| [25] |
RTCA. Minimum aviation system performance standards for local area augmentation system (LAAS): RTCA DO-245A [S]. Washington, D.C.: RTCA, 2004.
|
| [26] |
BRAFF R, SHIVELY C A. Derivation of ranging source integrity requirements for the local area augmentation system (LAAS)[J]. Navigation, 2000, 47(4): 279-288.
|
| [27] |
中华人民共和国交通运输部. 公路工程技术标准: [S]. 北京: 人民交通出版社, 2015.
|
|
Ministry of Transport of the People’s Republic of China. Technical standard of highway engineering: [S]. Beijing: China Communications Press, 2015 (in Chinese).
|
| [28] |
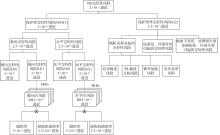
宋远, 黄智刚, 李锐, 等. 基于风险概率分解的RTK完好性评估方法研究 [J/OL]. 北京航空航天大学学报.(2024-05-08)[2024-12-04]. .
|
|
SONG Y, HUANG Z G, LI R, et al. An RTK integrity evaluation method based on risk probability decomposition[J/OL]. Journal of Beijing University of Aeronautics and Astronautics. (2024-05-08)[2024-12-04]. (in Chinese).
|
| [29] |
ICAO. Annex 10-Aeronautical telecommunications-Volume I-Radio navigational aids [S]∥International Standards and Recommended Practices. Montreal: ICAO, 2023.
|
| [30] |
ICAO. Navigation system panel(NSP), Agenda Item 2: WAAS Status [R]. 2024.
|
| [31] |
GALLON E, JOERGER M, PERVAN B. Robust modeling of GNSS tropospheric delay dynamics[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 2992-3003.
|
| [32] |
SHIVELY C A. Derivation of acceptable error limitsfor satellite signal faults in LAAS[C]∥Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999). Manassas: ION, 1999: 761-770.
|
| [33] |
RIFE J, PHELTS R E. Formulation of a time-varying maximum allowable error for ground-based augmentation systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(2): 548-560.
|
| [34] |
SOUALLE F, MINK M, BRAUN R, et al. Methodology for the design of integrity barriers in a regional augmentation satellite system[C]∥Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+2015). Manassas: ION, 2015: 1551-1564.
|
| [35] |
TEUNISSEN P J G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation[J]. Journal of Geodesy, 1995, 70(1): 65-82.
|
| [36] |
DOD. Global positioning system standard positioning service performance standard: 5th edition [S]. Washington, D.C.: DOD, 2020.
|
 ), 黄智刚1
), 黄智刚1