王俊潼, 包丹文( ), 周佳怡, 尚静萱, 张孜芊
), 周佳怡, 尚静萱, 张孜芊
收稿日期:2024-06-28
修回日期:2024-07-29
接受日期:2024-10-18
出版日期:2024-10-30
发布日期:2024-10-29
通讯作者:
包丹文
E-mail:baodanwen@nuaa.edu.cn
基金资助:
Juntong WANG, Danwen BAO(), Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG
Received:2024-06-28
Revised:2024-07-29
Accepted:2024-10-18
Online:2024-10-30
Published:2024-10-29
Contact:
Danwen BAO
E-mail:baodanwen@nuaa.edu.cn
Supported by:摘要:
随着中国低空经济的快速发展和“十四五”综合交通运输体系的规划需要,未来低空运输将逐步成为一种重要的交通运输方式。然而,目前中国低空空域尚未完全开放,与之密切相关的空域规划和航迹规划研究还处于起步阶段,难以满足快速发展的低空需求。因此,必须根据低空空域特点建立科学完善的低空空域规划和航迹规划方法理论体系。首先针对低空空域基本特征,对国内外低空空域规划限制因素、空域划设和航迹规划等研究进行系统性归纳和分析,总结评述了现有低空空域规划和航迹规划方面的研究成果和诸多不足,揭示了相关研究的共性问题所在。其次,结合中国低空发展现状,分析了采用块状或管道空域划设方法的可能性,并提出了由航迹到航迹簇再到航迹网络的发展路线和加速技术融合进行空域基础设施创新的发展思路。最后,提出了未来低空空域规划和航迹规划需关注的重点内容:一是考虑环境和社会因素为核心进行空域规划;二是探索空域划设分阶段、复合型划设策略和特殊区域规划方法;三是针对多样化运行场景,设计航迹规划泛用快速算法。
中图分类号:
王俊潼, 包丹文, 周佳怡, 尚静萱, 张孜芊. 低空空域规划研究现状与展望[J]. 航空学报, 2025, 46(11): 530879.
Juntong WANG, Danwen BAO, Jiayi ZHOU, Jingxuan SHANG, Ziqian ZHANG. Low-altitude airspace planning: A review and prospect[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879.
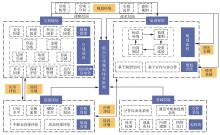
图 1
低空空域规划体系框架图
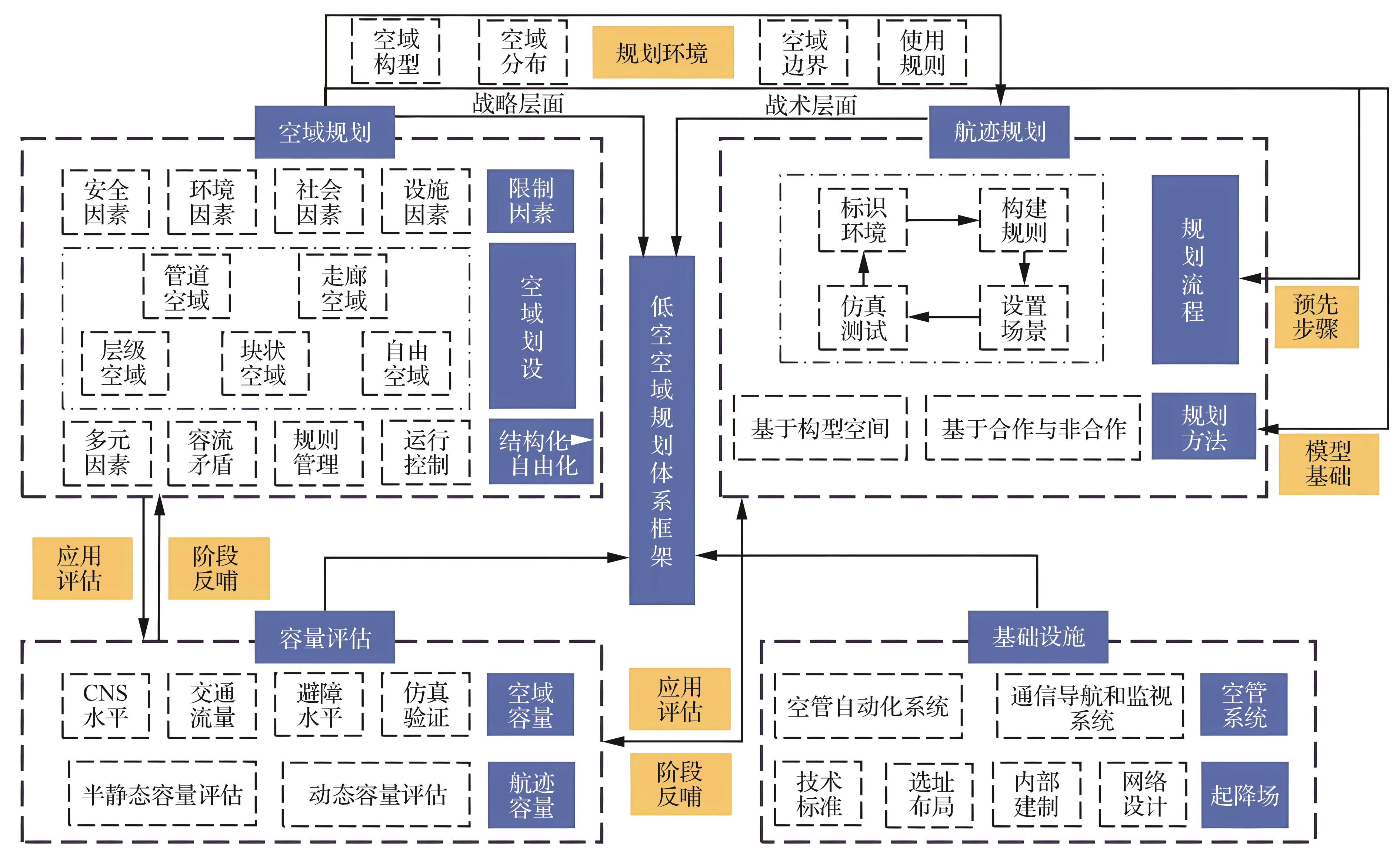

图 2
5类空域结构示意图[39-41]
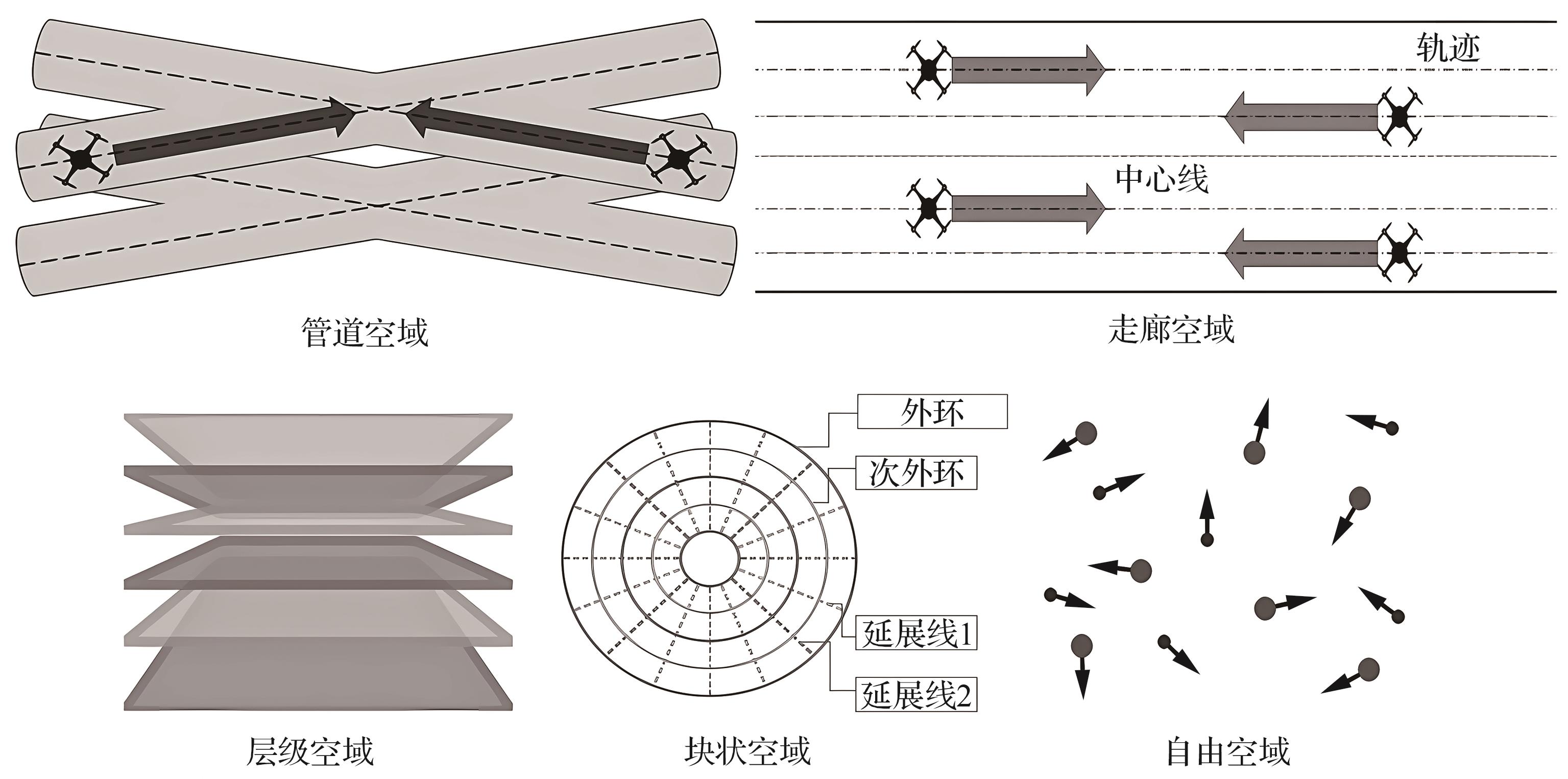
图 3
管道空域侧视图[41]
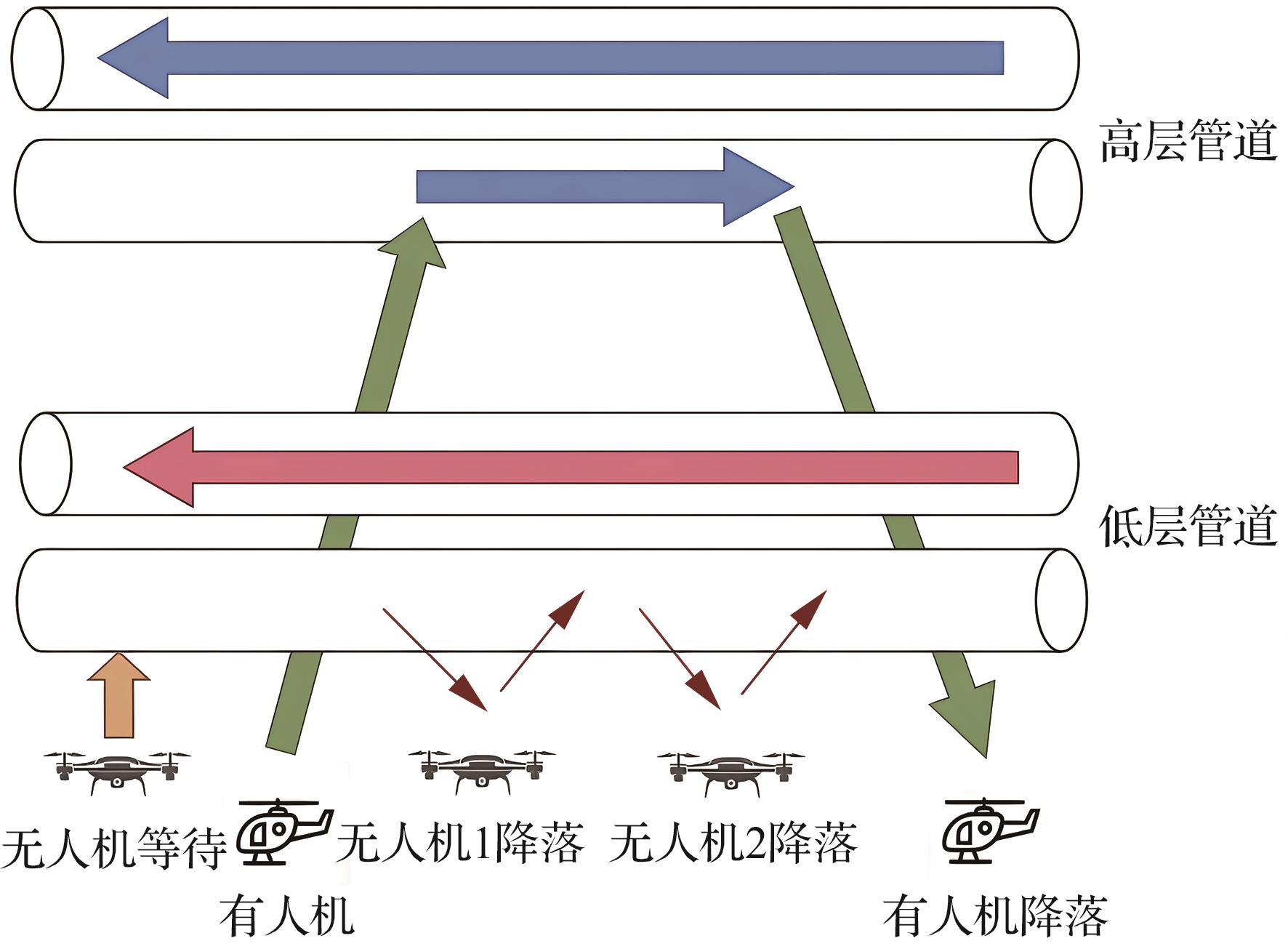
图 4
达拉斯UAM空域[51]
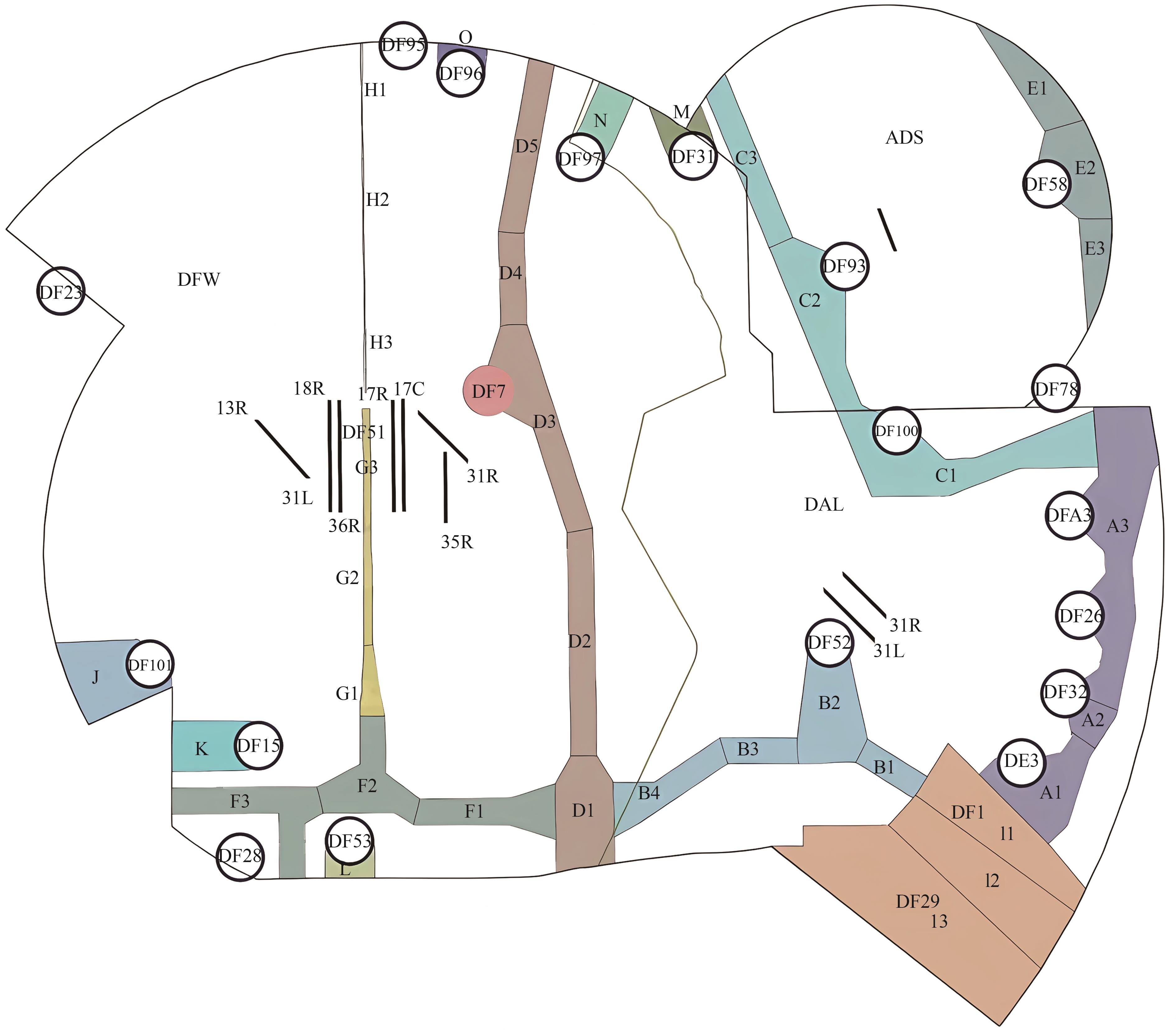
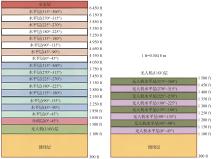
图 5
Metropolis层级空域[41]
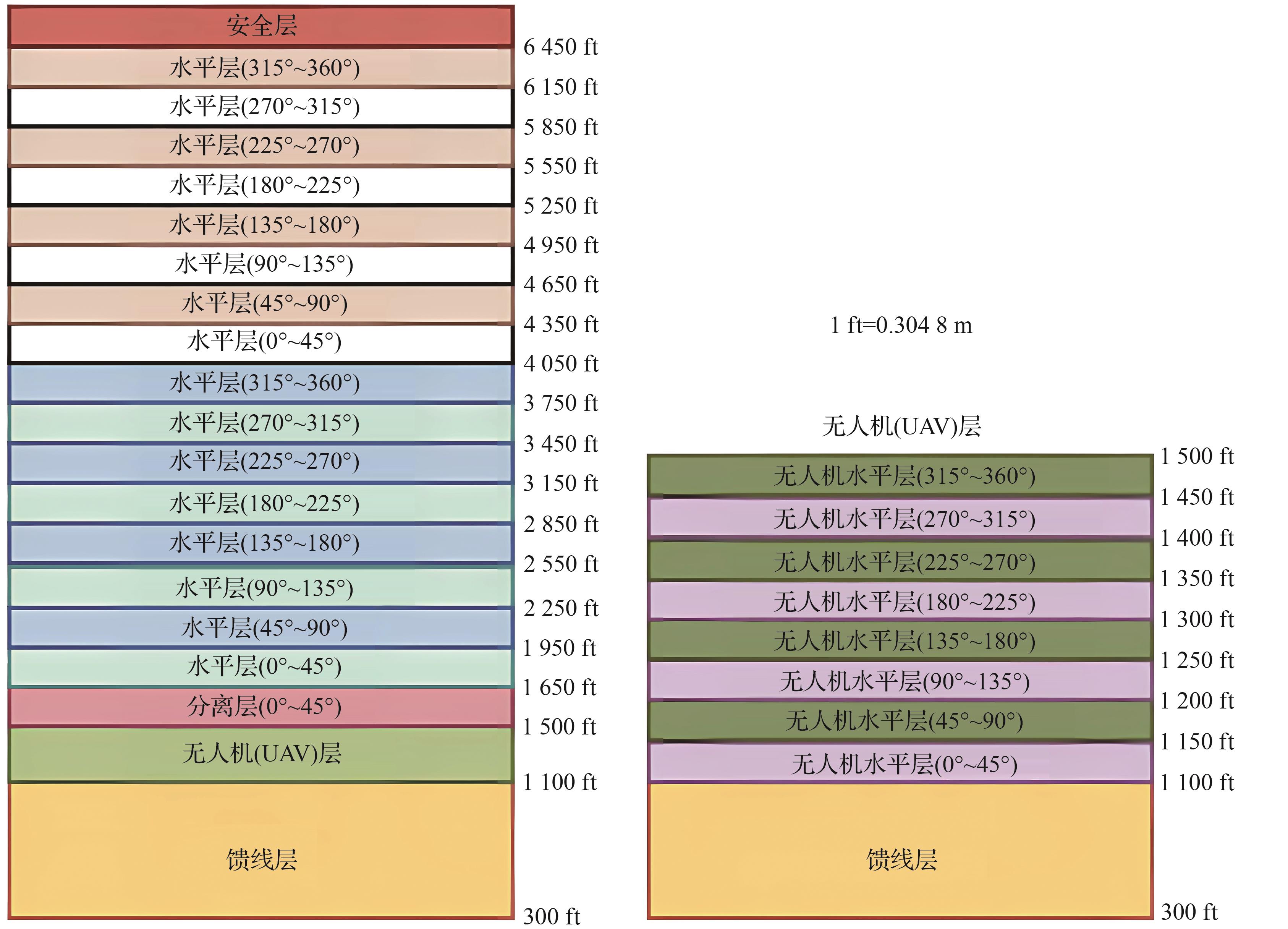
图 6
Amazon层级空域[54]
图 7
1 000 m下层级空域划设[9]
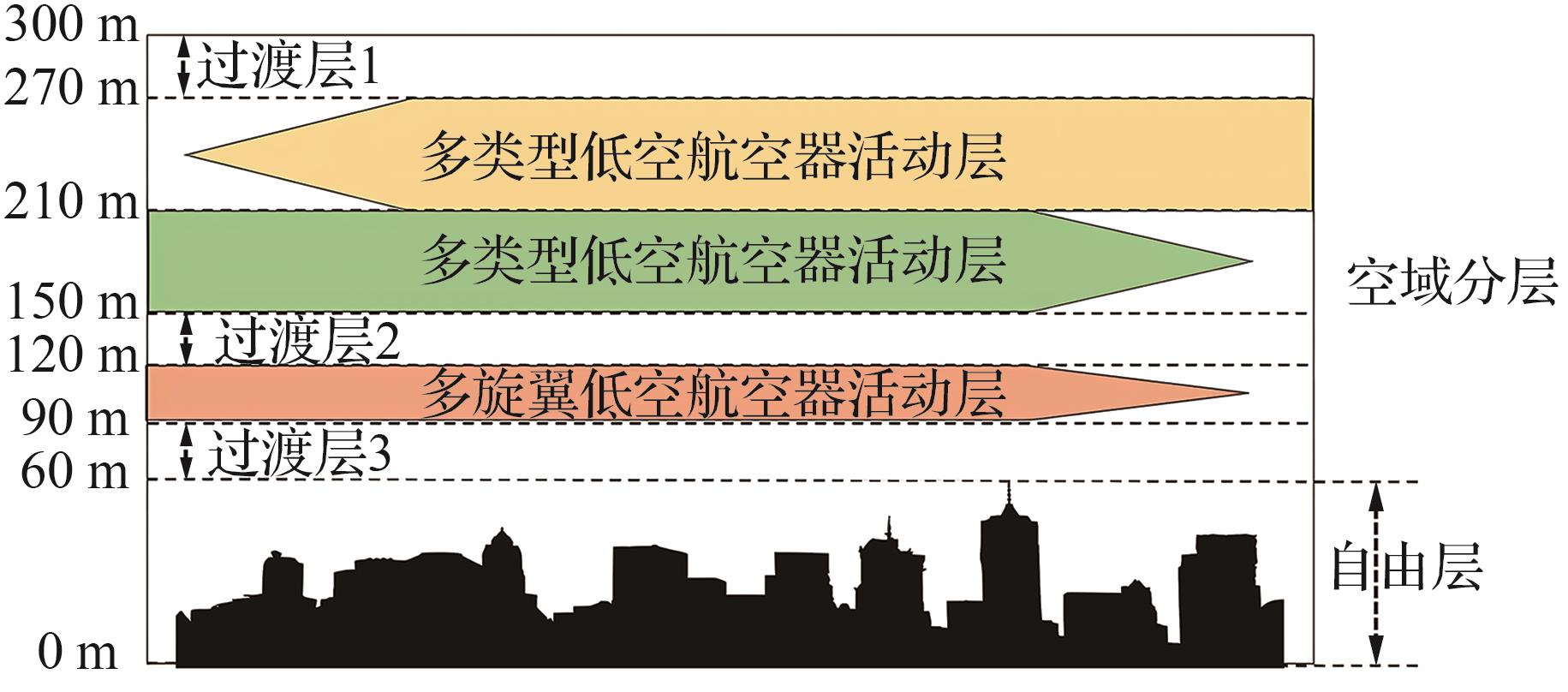
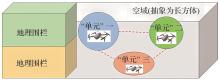
图 8
DLR空域概念[56]
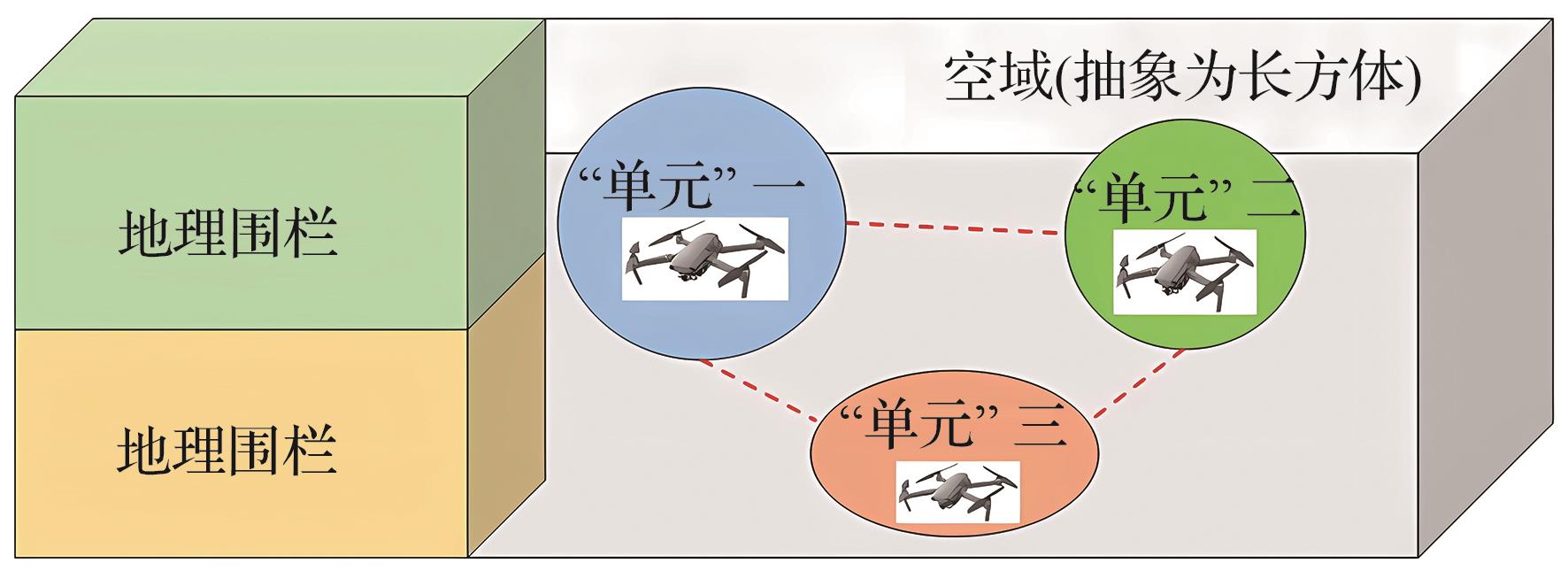

图 9
X/Y/Z空域与地面用地对应情况
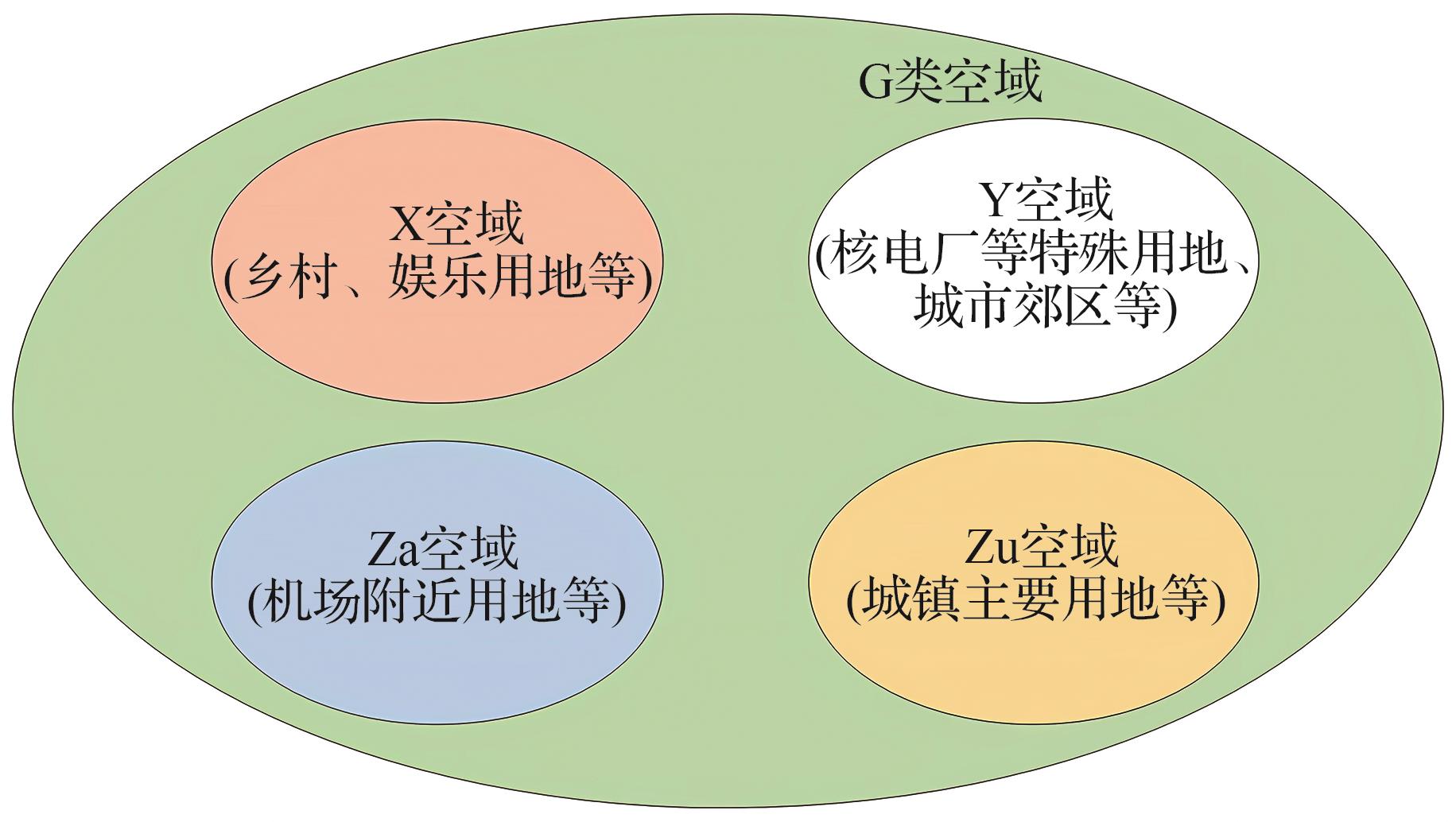
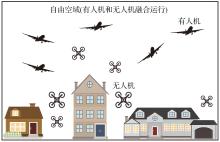
图 10
自由空域概念[41]
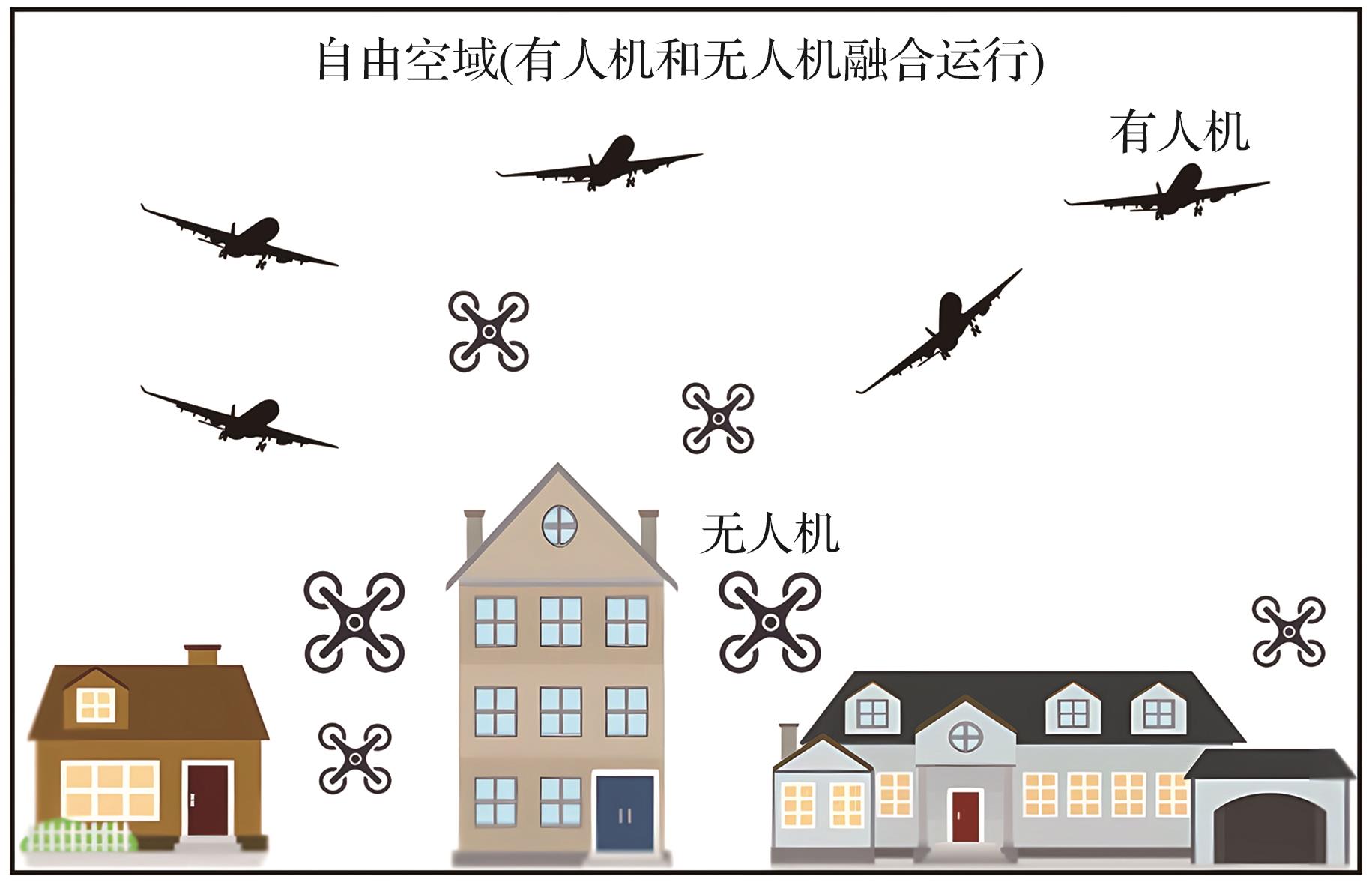
表 1
5种空域划设类型优缺点对比
| 空域类型 | 优点 | 缺点 |
|---|---|---|
| 管道空域 | 结构紧密,划设难度较低安全性高, 后续管理成本低 | 空域容量受限,空域拥堵风险较高,飞行约束较多 |
| 走廊空域 | 鲁棒性较高,运行性能较好, 飞行约束较少 | 走廊中心线和宽度设置难度大,不太适合于不规则的空域条件 |
| 层级空域 | 结构规范,能有效实现航空器垂直分离, 各层空域有明确的使用要求和规则 | 层间距合理设置难度较大,不同地区、不同空域条件设置标准难以统一 |
| 块状空域 | 空域结构能匹配地面城市发展情况, 每块空域包含的服务对象和运行场景清晰 | 航空器垂直分离风险较高,对环境问题和隐私问题解决效果不佳 |
| 自由空域 | 鲁棒性强,空域容量大, 飞行约束极少,空域自由度高 | 航空器碰撞风险高,后续管理成本高,对空域系统相关技术要求和管理要求高 |
表 2
5种空域划设类型特征对比
| 空域构型 | 管道空域 | 层级空域 | 走廊空域 | 块状空域 | 自由空域 |
|---|---|---|---|---|---|
| 基本构型 | 若干立体固定管道形成 立体棋盘状结构 | 若干不同高度范围、 不同功能的空域层 | 不同高度层分布一定 性能空域体或结构 | 若干不同种类/等级 的空域块 | 无结构 |
| 限制因素考虑 | 安全,设施 | 安全,设施 | 安全,设施(不全面), 环境(少) | 安全,设施,环境(少), 社会(少) | 安全,设施 |
| 自由度对比[ | 4-自由度限制 | 1-自由度限制 | 3-自由度限制 | 2-自由度限制 | 0-自由度 限制 |
| 里程碑 | 立体棋盘式、航道式/ 虚拟立体式 | 300~6 500 ft层级空域 | UAM走廊概念 | X、Y、Z块状空域 | 研究较 少,暂无 |
| 空域容量 | 最小 | 较小 | 中等 | 较大 | 最大 |
| 安全性 | 最高 | 较高 | 中等 | 较低 | 最低 |
| 工程实际可用性 | 易 | 较易 | 中等 | 中等 | 难 |
表 3
航迹规划研究重要文献总结
| 规划方法 | 作者 | 年份 | 算法 | 目标函数/目标 |
|---|---|---|---|---|
| 基于构型空间原理 | Sun等[ | 2017 | 改进人工势场法(新斥力函数) | 航迹平滑与避障 |
| 王庆禄等[ | 2024 | 改进人工势场法(斥力分解) | 有效避障 | |
| Luo等[ | 2022 | 三维JPS算法 | 动静态障碍物避障 | |
| 张洪海等[ | 2022 | 改进A*算法 | 风险、噪声和运输成本代价最小 | |
| 基于合作与非合作原理 | Bertram和Wei[ | 2020 | FastMDP算法 | 高密度动态避障 |
| Cui和Wang[ | 2021 | 双层Q-learning算法 | 动静态障碍物避障 | |
| Yu等[ | 2022 | 改进元胞蚁群算法 | 航迹长度与安全威胁最小 | |
| Tu和Juang[ | 2023 | 改进Q-learning算法 | 动静态障碍物避障 | |
| 解瑞云和海本斋[ | 2024 | 多策略鼠群优化算法 | 航迹长度、高度和转弯角成本最小 |
| [1] | QIU S D, YAO D K, WANG Z K. Analysis of low-altitude airspace[J]. Journal of Physics: Conference Series, 2019, 1302(4): 042032. |
| [2] | ADMINISTRATION F A. Unmanned aircraft system (UAS) traffic management concept of operations V2.0[EB/OL]. (2022-08-16)[2024-03-08]. . |
| [3] | SESAR. U-space blueprint[EB/OL]. (2017-10-30) [2024-03-08]. . |
| [4] | SESAR. European ATM master plan[EB/OL]. (2019-12-17)[2024-03-08]. . |
| [5] | 中央空中交通管理委员会. 低空空域使用管理规定(试行)征求意见稿[EB/OL]. (2014-07-23)[2024-03-08]. . |
| Central Air Traffic Control Board. Draft for soliciting comments on provisions on the administration of the use of low-altitude airspace (for trial implementation)[EB/OL]. (2014-07-23)[2024-03-08]. (in Chinese). | |
| [6] | 中华人民共和国国务院办公厅. 关于促进通用航空业发展的指导意见[EB/OL]. (2016-05-13)[2024-03-0.. |
| General Office of the State Council, People’s Republic of China. Guiding opinions on promoting the development of general aviation industry[EB/OL]. (2016-05-13)[2024-03-08]. (in Chinese). | |
| [7] | BAUM M S. Unmanned aircraft systems traffic management: UTM[M]. Boca Raton: CRC Press, 2021: 84-95. |
| [8] | QU W Q, XU C C, TAN X, et al. Preliminary concept of urban air mobility traffic rules[J]. Drones, 2023, 7(1): 54. |
| [9] | 全权, 李刚, 柏艺琴, 等. 低空无人机交通管理概览与建议[J]. 航空学报, 2020, 41(1): 023238. |
| QUAN Q, LI G, BAI Y Q, et al. Low altitude UAV traffic management: An introductory overview and proposal[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 023238 (in Chinese). | |
| [10] | 李诚龙, 屈文秋, 李彦冬, 等. 面向eVTOL航空器的城市空中运输交通管理综述[J]. 交通运输工程学报, 2020, 20(4): 35-54. |
| LI C L, QU W Q, LI Y D, et al. Overview of traffic management of urban air mobility (UAM) with eVTOL aircraft[J]. Journal of Traffic and Transportation Engineering, 2020, 20(4): 35-54 (in Chinese). | |
| [11] | BAURANOV A, RAKAS J. Designing airspace for urban air mobility: A review of concepts and approaches[J]. Progress in Aerospace Sciences, 2021, 125: 100726. |
| [12] | COLE K. Reactive trajectory generation and formation control for groups of UAVs in windy environments[D]. Washington, D.C.: The George Washington University, 2018. |
| [13] | TANG C K, WANG Y Y, ZHANG L L, et al. GNSS/inertial navigation/wireless station fusion UAV 3-D positioning algorithm with urban canyon environment[J]. IEEE Sensors Journal, 2022, 22(19): 18771-18779. |
| [14] | CHRISTIAN A W, CABELL R. Initial investigation into the psychoacoustic properties of small unmanned aerial system noise[C]∥23rd AIAA/CEAS Aeroacoustics Conference. Reston: AIAA, 2017. |
| [15] | 管淑君. 基于相角控制的多旋翼噪声抑制技术研究[D]. 南京: 南京航空航天大学, 2021. |
| GUAN S J. Research on multi-rotor noise suppression technology based on phase angle control[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021 (in Chinese). | |
| [16] | SCHÄFFER B, PIEREN R, HEUTSCHI K, et al. Drone noise emission characteristics and noise effects on humans-a systematic review[J]. International Journal of Environmental Research and Public Health, 2021, 18(11): 5940. |
| [17] | TORIJA A J, CLARK C. A psychoacoustic approach to building knowledge about human response to noise of unmanned aerial vehicles[J]. International Journal of Environmental Research and Public Health, 2021, 18(2): 682. |
| [18] | WAKIL K, NAEEM M A, ANJUM G A, et al. A hybrid tool for visual pollution assessment in urban environments[J]. Sustainability, 2019, 11(8): 2211. |
| [19] | AIRBUS. An assessment of public perception of Urban Air Mobility (UAM)[EB/OL]. (2023-06-26)[2024-03-08]. . |
| [20] | EASA. Study on the societal acceptance of Urban Air Mobility in Europe[EB/OL]. (2021-05-19)[2024-03-08]. . |
| [21] | CLOTHIER R A, GREER D A, GREER D G, et al. Risk perception and the public acceptance of drones[J]. Risk Analysis, 2015, 35(6): 1167-1183. |
| [22] | CHANG V, CHUNDURY P, CHETTY M, et al. Spiders in the sky[C]∥Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems. New York: ACM, 2017: 6765-6776. |
| [23] | LIDYNIA C, PHILIPSEN R, ZIEFLE M. Droning on about drones: Acceptance of and perceived barriers to drones in civil usage contexts[M]∥Advances in human factors in robots and unmanned systems. Cham: Springer International Publishing, 2016: 317-329. |
| [24] | SESAR. UAM use cases and scenarios (AMU-LED D 3.1)[EB/OL]. (2021-07-02)[2024-03-08]. . |
| [25] | VASCIK P D, BALAKRISHNAN H, HANSMAN R J. Assessment of air traffic control for urban air mobility and unmanned systems[EB/OL]. (2018-09-10)[2024-03-08]. . |
| [26] | SCHUCHARDT BIANCA I, DAGI G, THOMAS L, et al. Air traffic management as a vital part of urban air mobility: A review of DLR’s research work from 1995 to 2022[J]. Aerospace, 2023, 10(1): 81. |
| [27] | SESAR. Operational safety analysis and concept (AMU-LED D 2.1)[EB/OL]. (2021-07-02)[2024-03-08]. . |
| [28] | 张洪海, 李姗, 夷珈, 等. 城市低空航路规划研究综述[J]. 南京航空航天大学学报, 2021, 53(6): 827-838. |
| ZHANG H H, LI S, YI J, et al. Review on urban low-altitude air route planning[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2021, 53(6): 827-838 (in Chinese). | |
| [29] | ZENG Y, LYU J B, ZHANG R. Cellular-connected UAV: Potential, challenges, and promising technologies[J]. IEEE Wireless Communications, 2019, 26(1): 120-127. |
| [30] | 程琦. 城市环境GNSS定位导航关键技术研究[D]. 南京: 南京航空航天大学, 2021: 14-16. |
| CHENG Q. Research on key technologies of GNSS positioning and navigation in urban environment[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021: 14-16 (in Chinese). | |
| [31] | NIU Z, NIE P, TAO L, et al. RTK with the assistance of an IMU-based pedestrian navigation algorithm for smartphones[J]. Sensors, 2019, 19(14): 3228. |
| [32] | 陈晓, 毛烨炳. ADS-B技术在低空空域安全中应用的现状与展望[J]. 电子测量技术, 2022, 45(20): 61-67. |
| CHEN X, MAO Y B. Status and prospect of ADS-B technology application in low-altitude airspace security[J]. Electronic Measurement Technology, 2022, 45(20): 61-67 (in Chinese). | |
| [33] | EASA. Prototype technical specifications for the design of VFR vertiports for operation with manned VTOL-capable aircraft certified in the enhanced category (PTS-VPT-DSN)[EB/OL]. (2022-03-24)[2024-03-08]. . |
| [34] | YU Y, WANG M Y, MESBAHI M, et al. Vertiport selection in hybrid air-ground transportation networks via mathematical programs with equilibrium constraints[J]. IEEE Transactions on Control of Network Systems, 2023, 10(4): 2108-2119. |
| [35] | ZHANG H H, WANG F, FENG D K, et al. A logistics UAV parcel-receiving station and public air-route planning method based on bi-layer optimization[J]. Applied Sciences, 2023, 13(3): 1842. |
| [36] | REN X H, LI R B. The location problem of medical drone vertiports for emergency cardiac arrest needs[J]. Sustainability, 2024, 16(1): 44. |
| [37] | WU Z Q, ZHANG Y. Integrated network design and demand forecast for on-demand urban air mobility[J]. Engineering, 2021, 7(4): 473-487. |
| [38] | 钱欣悦, 张洪海, 张芳, 等. 末端配送物流无人机起降点选址分配问题研究[J]. 武汉理工大学学报(交通科学与工程版), 2021, 45(4): 682-687, 693. |
| QIAN X Y, ZHANG H H, ZHANG F, et al. Research on location allocation of UAV landing points for terminal distribution logistics[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2021, 45(4): 682-687, 693 (in Chinese). | |
| [39] | SUNIL E, HOEKSTRA J, ELLERBROEK J, et al. Metropolis: Relating airspace structure and capacity for extreme traffic densities[C]∥11th USA/EUROPE Air Traffic Management R & D Seminar (ATM2015), 2015: 1-10. |
| [40] | METROPOLIS. Metropolis WP1 work plan[EB/OL]. (2014-03-05)[2024-03-08]. . |
| [41] | METROPOLIS. METROPOLIS concept design report[EB/OL]. (2014-10-03)[2024-03-08]. . |
| [42] | QUAN Q, FU R, LI M X, et al. Practical distributed control for VTOL UAVs to pass a virtual tube[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(2): 342-353. |
| [43] | QUAN Q, GAO Y, BAI C G. Distributed control for a robotic swarm to pass through a curve virtual tube[J]. Robotics and Autonomous Systems, 2023, 162: 104368. |
| [44] | NASA. Corridor design and analysis for UAM op-erations[EB/OL]. (2022-01-29)[2024-03-08]. . |
| [45] | JANG D S, IPPOLITO C A, SANKARARAMAN S, et al. Concepts of airspace structures and system analysis for UAS traffic flows for urban areas[C]∥AIAA Information Systems-AIAA Infotech @ Aerospace. Reston: AIAA, 2017. |
| [46] | AIRBUS. Blue print for the sky: The road map for the safe integration of autonomous aircraft[EB/OL]. (2018-09-05)[2024-03-08]. . |
| [47] | EMBRAERX. Flight plan 2030: An air traffic man-agement concept for urban air mobility[EB/OL]. (2019-05-28)[2024-03-08]. . |
| [48] | MUNA S I, MUKHERJEE S, NAMUDURI K, et al. Air corridors: concept, design, simulation, and rules of engagement[J]. Sensors, 2021, 21(22): 7536. |
| [49] | ADMINISTRATION F A. Unmanned aircraft syste-m (UAS) traffic management concept of operation-s V1.0[EB/OL]. (2018-06-05) [2024-03-08]. . |
| [50] | UAM T K. K-UAM concept of operations 1.0[EB/OL]. (2021-09-29)[2024-03-08]. . |
| [51] | VERMA S, DULCHINOS V, WOOD R D, et al. Design and analysis of corridors for UAM operations[C]∥2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC). Reston: AIAA, 2022. |
| [52] | LASCARA B, LACHER A, DEGARM O M, et al. Urban air mobility airspace integration concepts[EB/OL](2019-06-10)[2024-03-08]. . |
| [53] | MCCARTHY T, PFORTE L, BURKE R. Fundamental elements of an urban UTM[J]. Aerospace, 2020, 7(7): 85. |
| [54] | AMAZON. Revising the airspace model for the safe integration of sUAS[EB/OL]. (2015-11-28)[2024-03-08]. . |
| [55] | DACUS. Structures and rules in capacity constrai-ned (urban) environments (D 5.1)[EB/OL]. (2021-05-27)[2024-03-08]. . |
| [56] | DLR. DLR blueprint[EB/OL]. (2017-12-15)[2024-03-08]. . |
| [57] | QUAN Q, FU R, CAI K Y. How far two UAVs should be subject to communication uncertainties[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 429-445. |
| [58] | CORUS. U-space concept of operations vol1[EB/OL]. (2019-11-08)[2024-03-08]. . |
| [59] | HOEKSTRA J M, RUIGROK R C J, GENT V. Free flight in a crowded airspace?[M]. Reston: AIAA, 2001. |
| [60] | HOEKSTRA J M, VAN GENT R N H W, RUIGROK R C J. Designing for safety: The ‘free flight’ air traffic management concept[J]. Reliability Engineering & System Safety, 2002, 75(2): 215-232. |
| [61] | 张洪海, 邹依原, 张启钱, 等. 未来城市空中交通管理研究综述[J]. 航空学报, 2021, 42(7): 024638. |
| ZHANG H H, ZOU Y Y, ZHANG Q Q, et al. Future urban air mobility management: Review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(7): 024638 (in Chinese). | |
| [62] | JARDIN M R. Analytical relationships between conflict counts and air-traffic density[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(6): 1150-1156. |
| [63] | QUAN Q, LI M X, FU R. Sky highway design for dense traffic[J]. IFAC-PapersOnLine, 2021, 54(2): 140-145. |
| [64] | VÁSÁRHELYI G, VIRÁGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3(20): eaat3536. |
| [65] | AGGARWAL S, KUMAR N. Path planning techniques for unmanned aerial vehicles: Review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270-299. |
| [66] | LIU J Y, GUO Z Q, LIU S Y. The simulation of the UAV collision avoidance based on the artificial potential field method[J]. Advanced Materials Research, 2012, 591-593: 1400-1404. |
| [67] | SUN J Y, TANG J, LAO S Y. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm[J]. IEEE Access, 2017, 5: 18382-18390. |
| [68] | 王庆禄, 吴冯国, 郑成辰, 等. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5): 1461-1468. |
| WANG Q L, WU F G, ZHENG C C, et al. UAV path planning based on optimized artificial potential field method[J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468 (in Chinese). | |
| [69] | ZHANG N, ZHANG M C, LOW K H. 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace[J]. Transportation Research Part C: Emerging Technologies, 2021, 129: 103123. |
| [70] | LUO Y, LU J K, ZHANG Y, et al. 3D JPS path optimization algorithm and dynamic-obstacle avoidance design based on near-ground search drone[J]. Applied Sciences, 2022, 12(14): 7333. |
| [71] | 张洪海, 张连东, 刘皞, 等. 城市低空物流无人机航迹规划模型研究[J]. 交通运输系统工程与信息, 2022, 22(1): 256-264. |
| ZHANG H H, ZHANG L D, LIU H, et al. Track planning model for logistics unmanned aerial vehicle in urban low-altitude airspace[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(1): 256-264 (in Chinese). | |
| [72] | BERTRAM J, WEI P. Distributed computational guidance for high-density urban air mobility with cooperative and non-cooperative collision avoidance[C]∥AIAA Scitech 2020 Forum. Reston: AIAA, 2020. |
| [73] | FU S Y, HAN L W, TIAN Y, et al. Path planning for unmanned aerial vehicle based on genetic algorithm[C]∥2012 IEEE 11th International Conference on Cognitive Informatics and Cognitive Computing. Piscataway: IEEE Press, 2012: 140-144. |
| [74] | CUI Z Y, WANG Y. UAV path planning based on multi-layer reinforcement learning technique[J]. IEEE Access, 2021, 9: 59486-59497. |
| [75] | YU J, GUO J, ZHANG X, et al. UAV path planning in dynamical environment: A novel ICACO-IDWA algorithm[J]. Mathematical Problems in Engineering, 2022, 2022: 1-16. |
| [76] | 吕超, 李慕宸, 欧家骏. 基于分层深度强化学习的无人机混合路径规划[J/OL]. 北京航空航天大学学报, 2023: 1-13. (2023-11-01). . |
| LYU C, LI M C, OU J J. Hybrid path planning of UAV based on hierarchical depth reinforcement learning[J/OL]. China Industrial Economics, 2023: 1-13. (2023-11-01). (in Chinese). | |
| [77] | YANG Q M, ZHANG J D, SHI G Q. Path planning for unmanned aerial vehicle passive detection under the framework of partially observable Markov decision process[C]∥2018 Chinese Control and Decision Conference (CCDC). Piscataway: IEEE Press, 2018: 3896-3903. |
| [78] | 王瑶, 任安虎, 任洋洋. 改进蚁群算法的无人机航迹规划[J]. 电光与控制, 2024, 31(4): 43-48. |
| WANG Y, REN A H, REN Y Y. An improved ant colony algorithm for UAV trajectory planning[J]. Electronics Optics & Control, 2024, 31(4): 43-48 (in Chinese). | |
| [79] | 黄鹤, 高永博, 茹锋, 等. 基于自适应黏菌算法优化的无人机三维路径规划[J]. 上海交通大学学报, 2023, 57(10): 1282-1291. |
| HUANG H, GAO Y B, RU F, et al. 3D path planning of UAV based on adaptive slime mould algorithm optimization[J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291 (in Chinese). | |
| [80] | 王康, 司鹏, 陈莉, 等. 基于改进沙猫群算法的无人机三维航迹规划[J]. 兵工学报, 2023, 44(11): 3382-3393. |
| WANG K, SI P, CHEN L, et al. 3D path planning of unmanned aerial vehicle based on enhanced sand cat swarm optimization algorithm[J]. Acta Armamentarii, 2023, 44(11): 3382-3393 (in Chinese). | |
| [81] | TU G T, JUANG J G. UAV path planning and obstacle avoidance based on reinforcement learning in 3D environments[J]. Actuators, 2023, 12(2): 57. |
| [82] | 解瑞云, 海本斋. 多策略鼠群优化算法的无人机三维航迹规划[J]. 机械设计与制造, 2024(9): 112-119. |
| XIE R Y, HAI B Z. Multi-strategy rat swarm optimizer for unmanned aerial vehicle 3D flight path planning[J]. Machinery Design & Manufacture, 2024(9): 112-119 (in Chinese). | |
| [83] | 雷耀麟, 丁文锐, 罗祎喆, 等. 无人机数据采集任务中的航迹与资源优化[J/OL]. 北京航空航天大学学报,1-14[2024-03-08]. . |
| LEI Y L, DING W R, LUO Y Z, et al. Trajectory planning and resource allocation methods in UAV data collection missions [J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 1-14[2024-03-08]. (in Chinese). | |
| [84] | SAFADI Y, FU R, QUAN Q, et al. Macroscopic fundamental diagrams for low-altitude air city transport[J]. Transportation Research Part C: Emerging Technologies, 2023, 152: 104141. |
| [1] | 吴启晖, 董超, 贾子晔, 崔灿, 冯斯梦, 周福辉, 谢华. 低空智联网组网与控制理论方法[J]. 航空学报, 2024, 45(3): 28809-028809. |
| [2] | 胡玉梅, 潘泉, 邓豹. 基于Fisher信息的传感器航迹自适应滤波算法[J]. 航空学报, 2024, 45(20): 629825-629825. |
| [3] | 谢华, 韩斯特, 尹嘉男, 纪晓辉, 杨逸晨. 城市低空无人机飞行计划协同推演与优化调配方法[J]. 航空学报, 2024, 45(19): 330018-330018. |
| [4] | 王振威, 刘凯, 郭健, 刘晓鹏. 一种基于领导⁃跟随策略的多无人机⁃多无人艇编队协同机制[J]. 航空学报, 2023, 44(S2): 729791-729791. |
| [5] | 高显忠, 邓小龙, 王玉杰, 郭正, 侯中喜. 临近空间太阳能飞机能量最优飞行航迹规划方法展望[J]. 航空学报, 2023, 44(8): 27265-027265. |
| [6] | 廖小罕, 屈文秋, 徐晨晨, 贺洪波, 王俊伟, 石伟博. 城市空中交通及其新型基础设施低空公共航路研究综述[J]. 航空学报, 2023, 44(24): 28521-028521-. |
| [7] | 雷刚, 罗炜, 李云舒, 赖灿辉. 高超声速滑翔飞行器多禁飞区再入机动航迹优化[J]. 航空学报, 2023, 44(15): 528769-528769. |
| [8] | 郭琪磊, 桑为民, 牛俊杰, 袁烨. 复杂气象条件下考虑结冰风险的无人机飞行策略[J]. 航空学报, 2023, 44(1): 627518-627518. |
| [9] | 谢华, 黎子弘, 杨磊, 朱永文, 刘芳子. 容量受限下城市对航班四维航迹优化[J]. 航空学报, 2022, 43(8): 325581-325581. |
| [10] | 张洲宇, 曹云峰, 范彦铭. 低空小型无人机空域冲突视觉感知技术研究进展[J]. 航空学报, 2022, 43(8): 25645-025645. |
| [11] | 李宇辉, 赵敏, 陈奇, 姚敏, 何紫阳. 复杂环境下翼伞系统的组合式航迹规划[J]. 航空学报, 2021, 42(6): 324566-324566. |
| [12] | 杨磊, 李文博, 刘芳子, 陈雨童, 赵征. 柔性空域结构下连续下降航迹多目标优化[J]. 航空学报, 2021, 42(2): 324157-324157. |
| [13] | 李宪强, 马戎, 张伸, 侯砚泽, 裴毅飞. 蚁群算法的改进设计及在航迹规划中的应用[J]. 航空学报, 2020, 41(S2): 724381-724381. |
| [14] | 陈奇, 赵敏, 李宇辉, 何紫阳. 基于梯度下降法的翼伞系统最优分段航迹规划[J]. 航空学报, 2020, 41(12): 324226-324226. |
| [15] | 全权, 李刚, 柏艺琴, 付饶, 李梦芯, 柯晨旭, 蔡开元. 低空无人机交通管理概览与建议综述[J]. 航空学报, 2020, 41(1): 23238-023238. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学