雷刚, 罗炜( ), 李云舒, 赖灿辉
), 李云舒, 赖灿辉
收稿日期:2023-03-30
修回日期:2023-04-27
接受日期:2023-05-16
出版日期:2023-08-15
发布日期:2023-05-18
通讯作者:
罗炜
E-mail:2237087676@qq.com
Gang LEI, Wei LUO(), Yunshu LI, Canhui LAI
Received:2023-03-30
Revised:2023-04-27
Accepted:2023-05-16
Online:2023-08-15
Published:2023-05-18
Contact:
Wei LUO
E-mail:2237087676@qq.com
摘要:
针对高超声速滑翔飞行器航迹规划中面临的复杂环境约束问题,提出了一种结合几何-动力学的航路点跟踪方法并设计了一种禁飞区约束简化策略。首先,在通过飞行走廊确定飞行过程中航向角变化范围的基础上,以角度为指标设计代价函数,并基于此对飞行状态进行预测寻优,得到了倾侧角自适应搜索的横向机动模型;其次,将几何平面上的虚拟航路点生成策略拓展到地球曲面,并基于图论思想和动力学评估模型,获得了全局最佳虚拟航路点生成策略;最后,将2种方法结合得到解决多禁飞区约束的航迹规划方法。仿真结果表明,所提方法能够快速有效获得最佳虚拟航路点,并且降低航迹规划中的倾侧角优化难度;蒙特卡洛仿真实验表明,本方法具有较好的鲁棒性。
中图分类号:
雷刚, 罗炜, 李云舒, 赖灿辉. 高超声速滑翔飞行器多禁飞区再入机动航迹优化[J]. 航空学报, 2023, 44(15): 528769-528769.
Gang LEI, Wei LUO, Yunshu LI, Canhui LAI. Optimization of reentry maneuver trajectory for hypersonic glide vehicles in multiple no-fly zones[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528769-528769.
图 1
几何搜索空间
图 2
航向角变化

图 3
高度-速度走廊
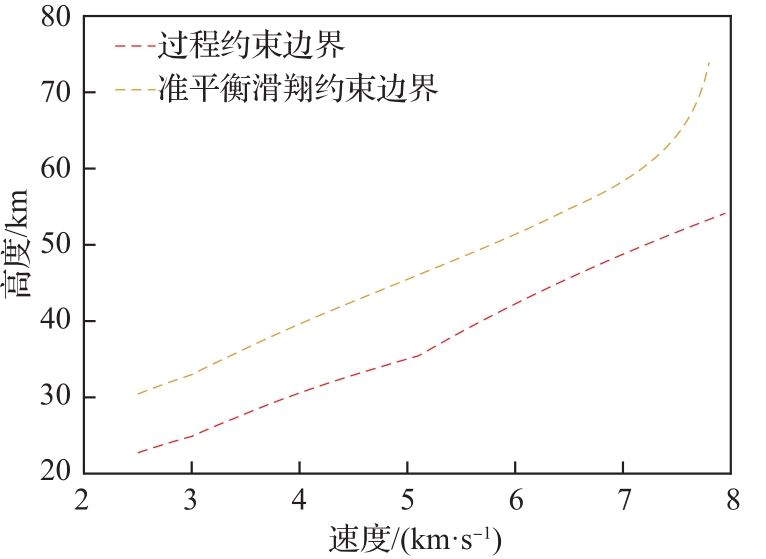
图 4
倾侧角-速度走廊
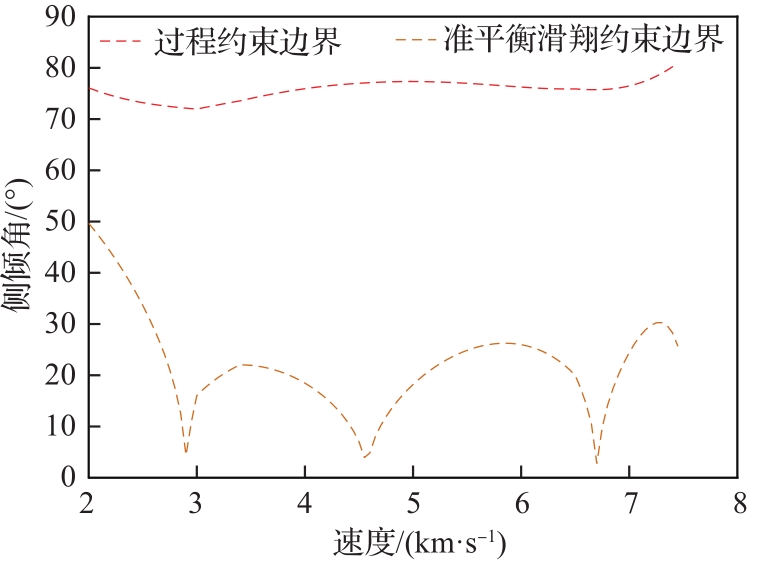
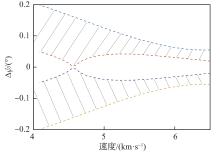
图 5
航向角-速度走廊

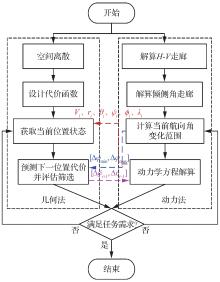
图 6
几何-动力学方法流程
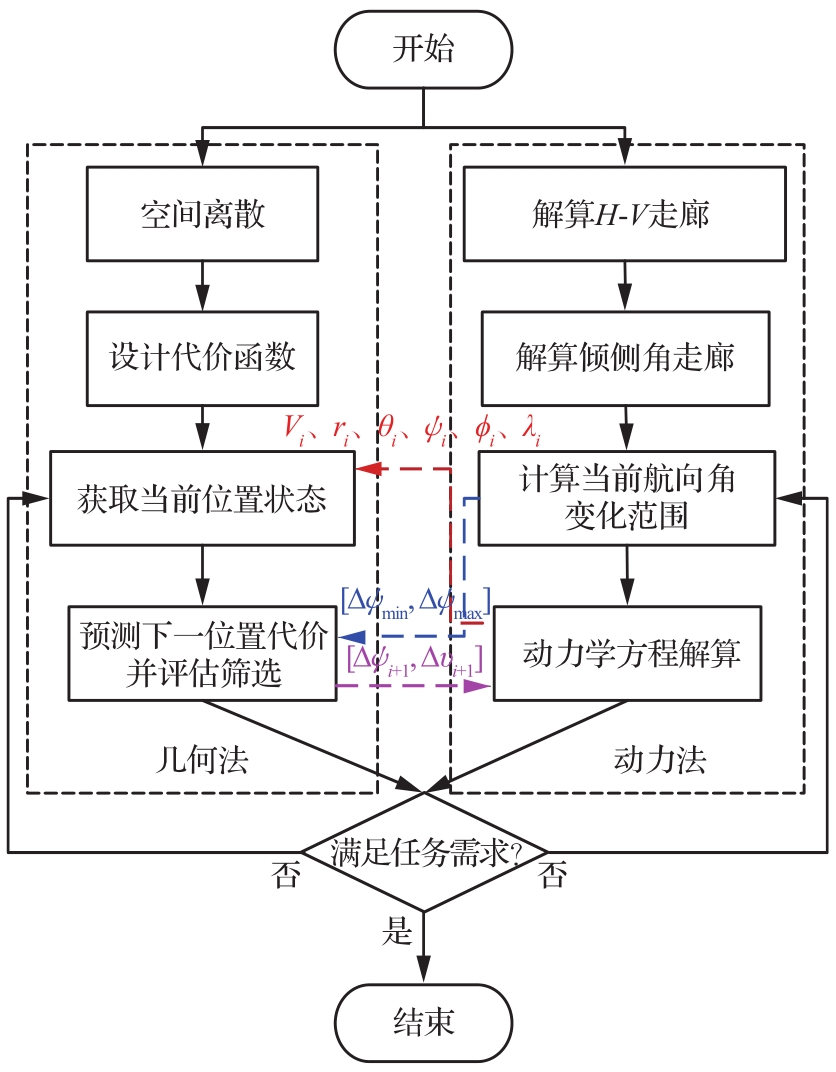
图 7
基于角度的空间搜索
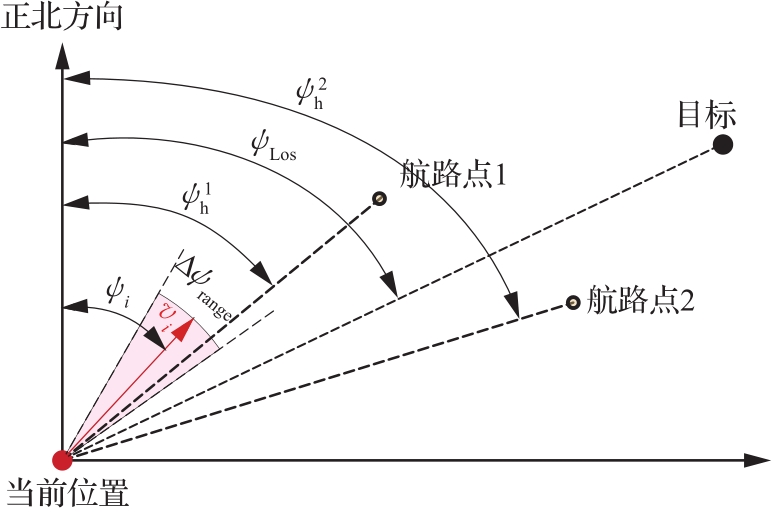

图 8
航迹及威胁区变化
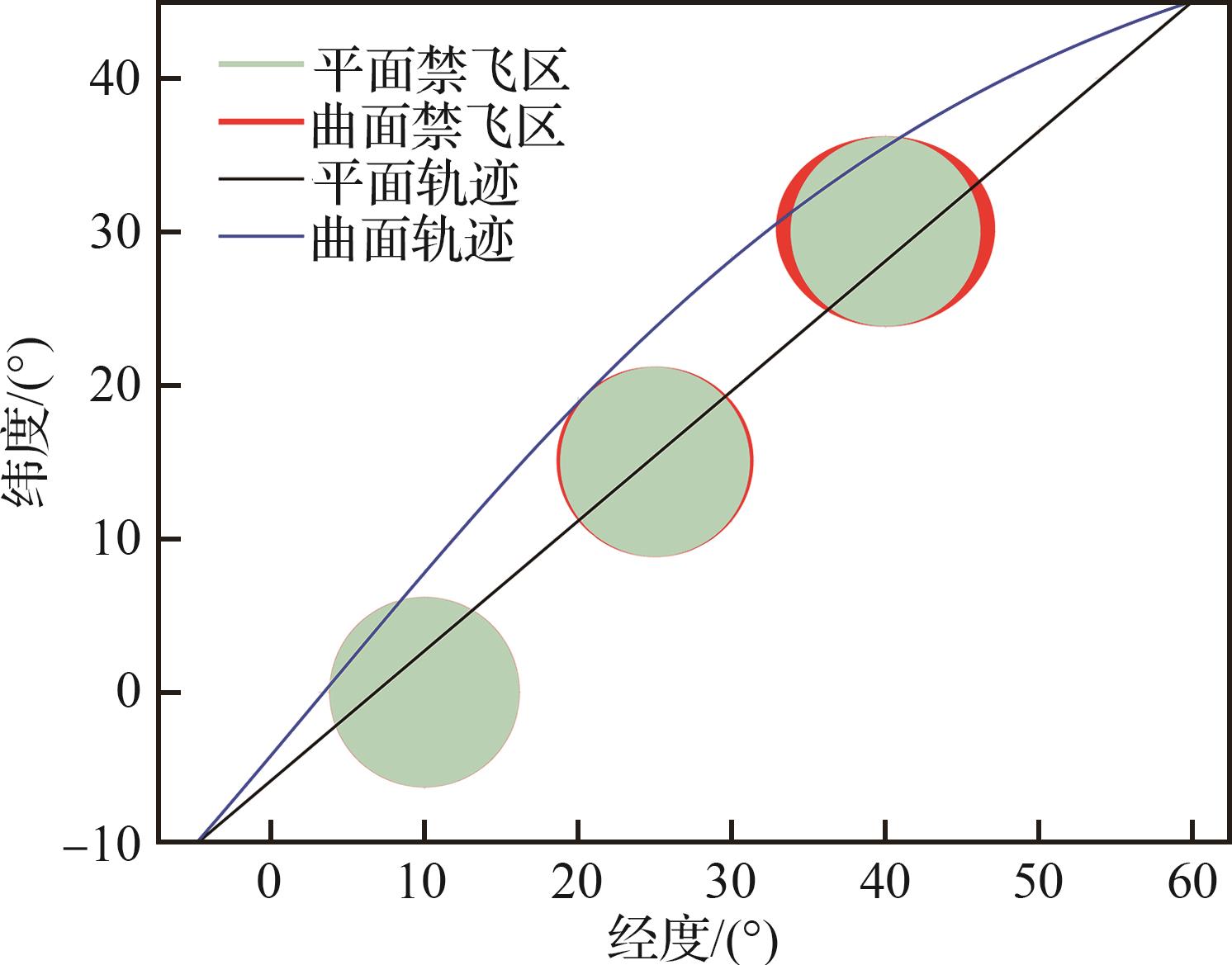
图 9
基于曲面的航路点生成示意

图 10
倾侧角变化差异
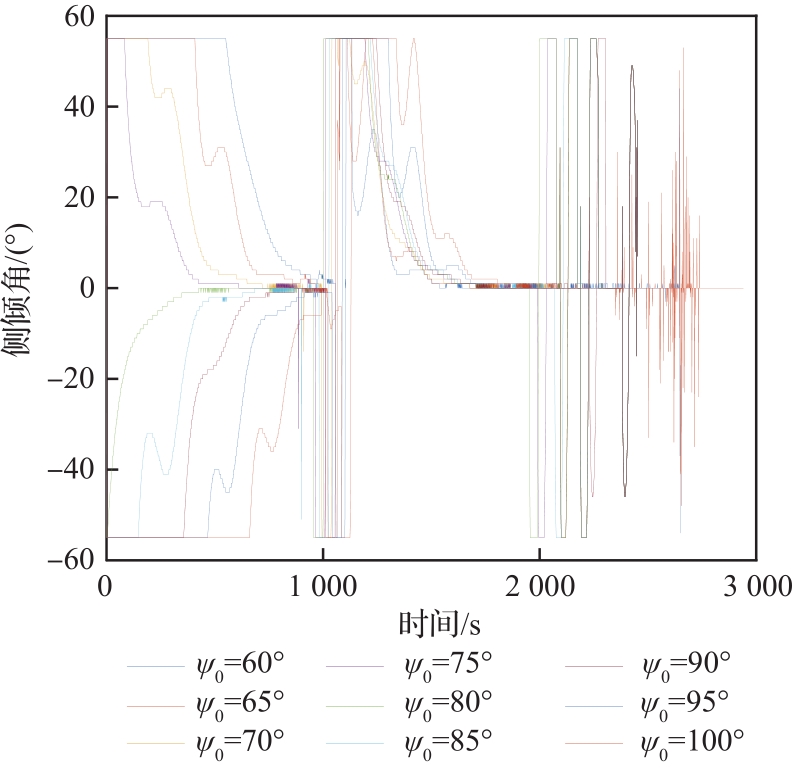
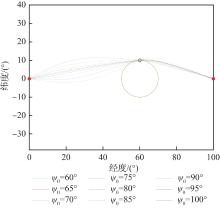
图 11
平面轨迹差异


图 12
剩余能量变化差异
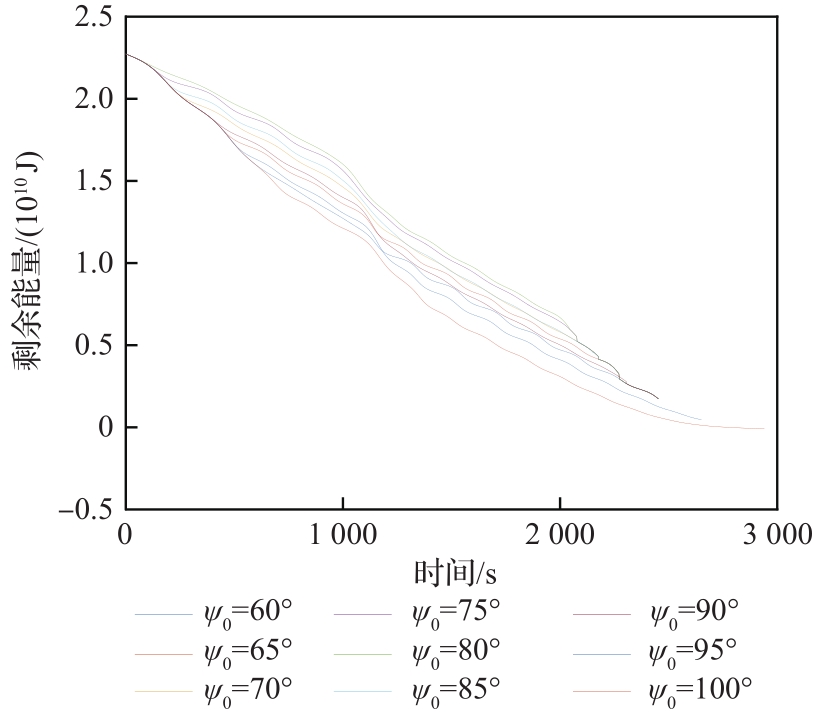

图 13
深度搜索策略


图 14
改进航路点生成策略
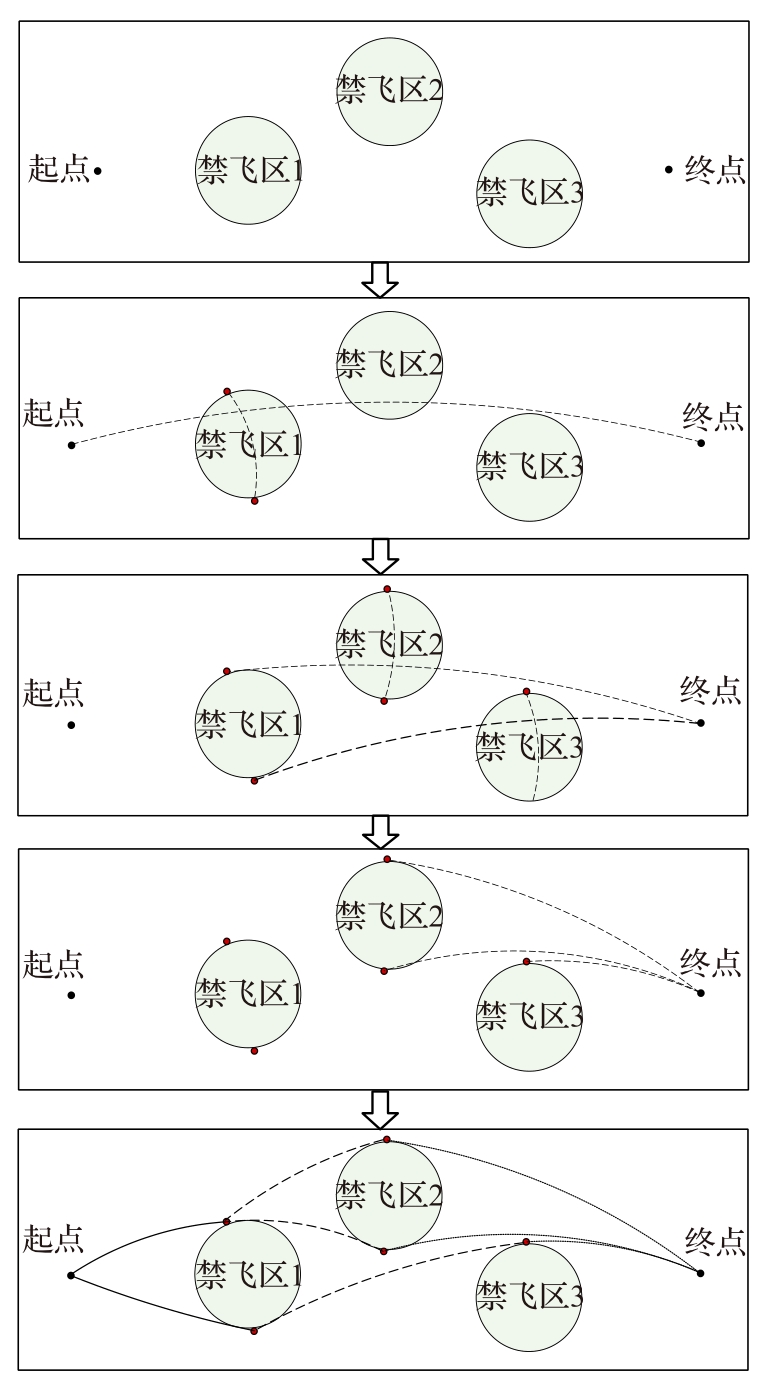
表 1
初始状态
| 50.0 | 6 500.0 | 0.001 | 1.571 |
表 2
过程约束信息
| 3 500.0 | 200.0 | 3.0 |
表 3
飞行点位信息
| 点位 | 起点 | 航路点1 | 航路点2 | 终点 |
|---|---|---|---|---|
| 坐标/(°) | (0,0) | (8,11) | (15,22) | (20,25) |

图 15
空间轨迹对比结果
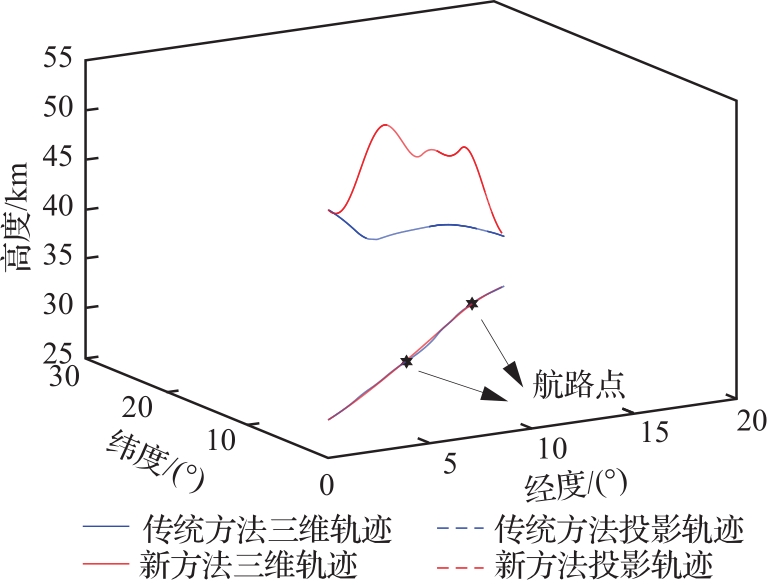
图 16
倾侧角变化对比结果
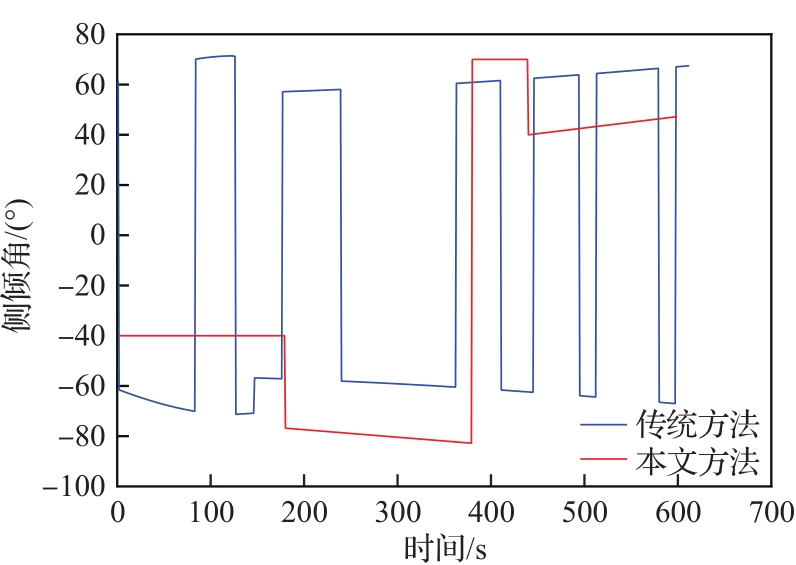

图 17
剩余能量变化对比结果


图 18
过程约束变化对比结果


图 19
基于大地线的航路点生成
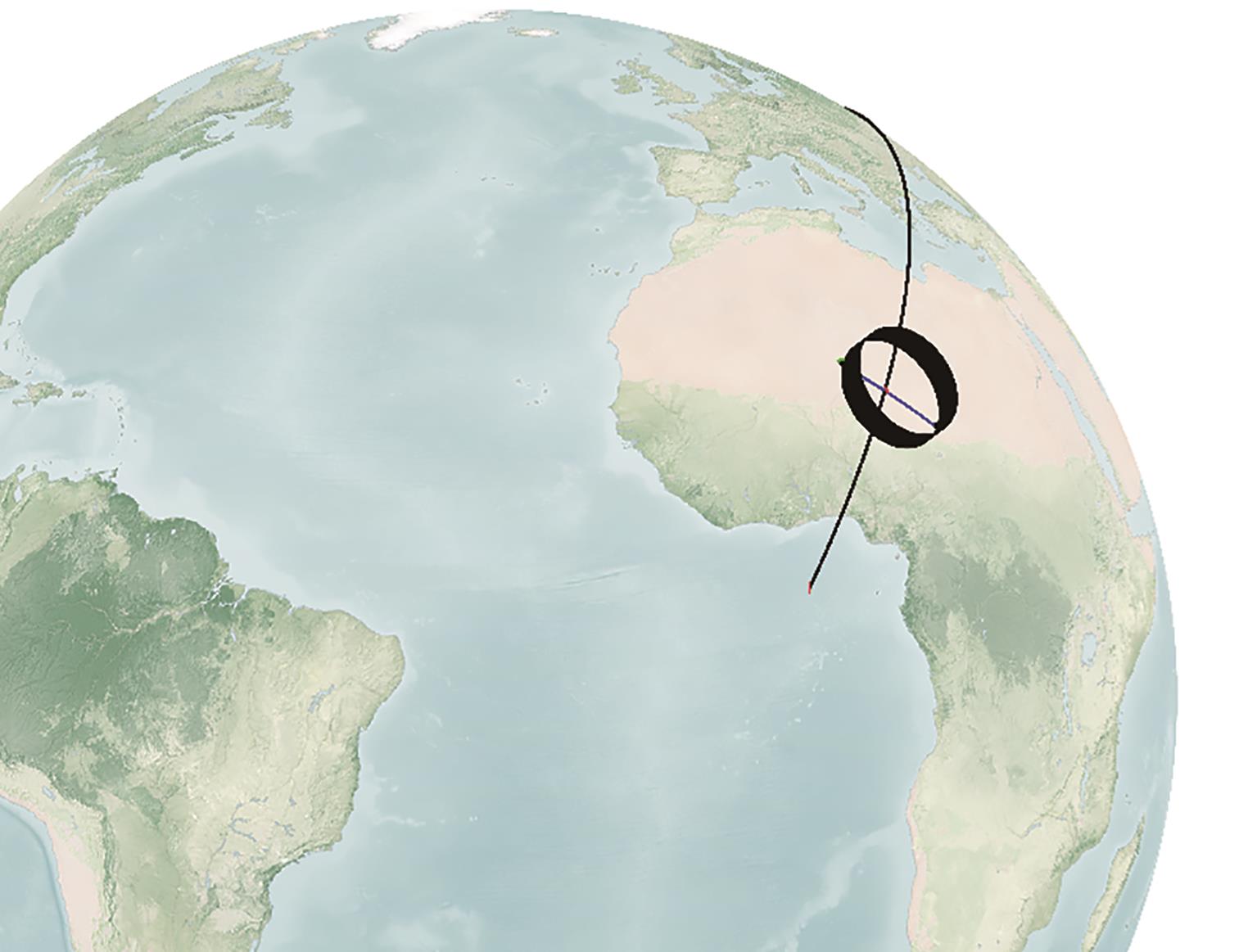
图 20
平面投影

表 4
始末点位信息
| 点位 | 起点 | 终点 |
|---|---|---|
| 坐标/(°) | (0,0) | (90,10) |
表 5
威胁区信息
| 参数 | 威胁区 | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| 坐标/(°) | (30,12) | (60,5) | (80,20) |
| 半径/km | 650 | 1 100 | 900 |
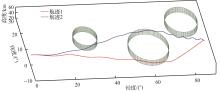
图 21
空间轨迹
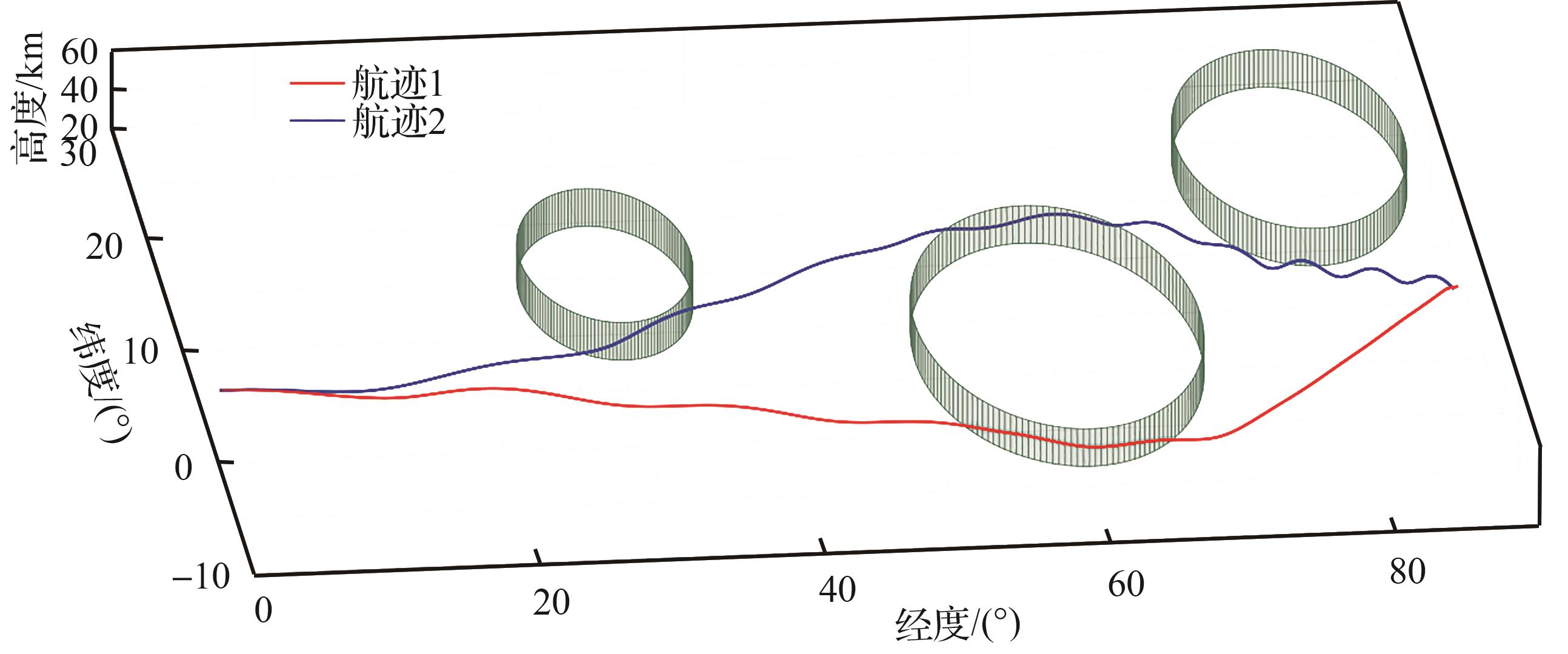
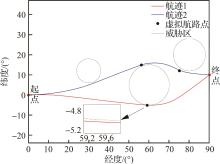
图 22
平面轨迹
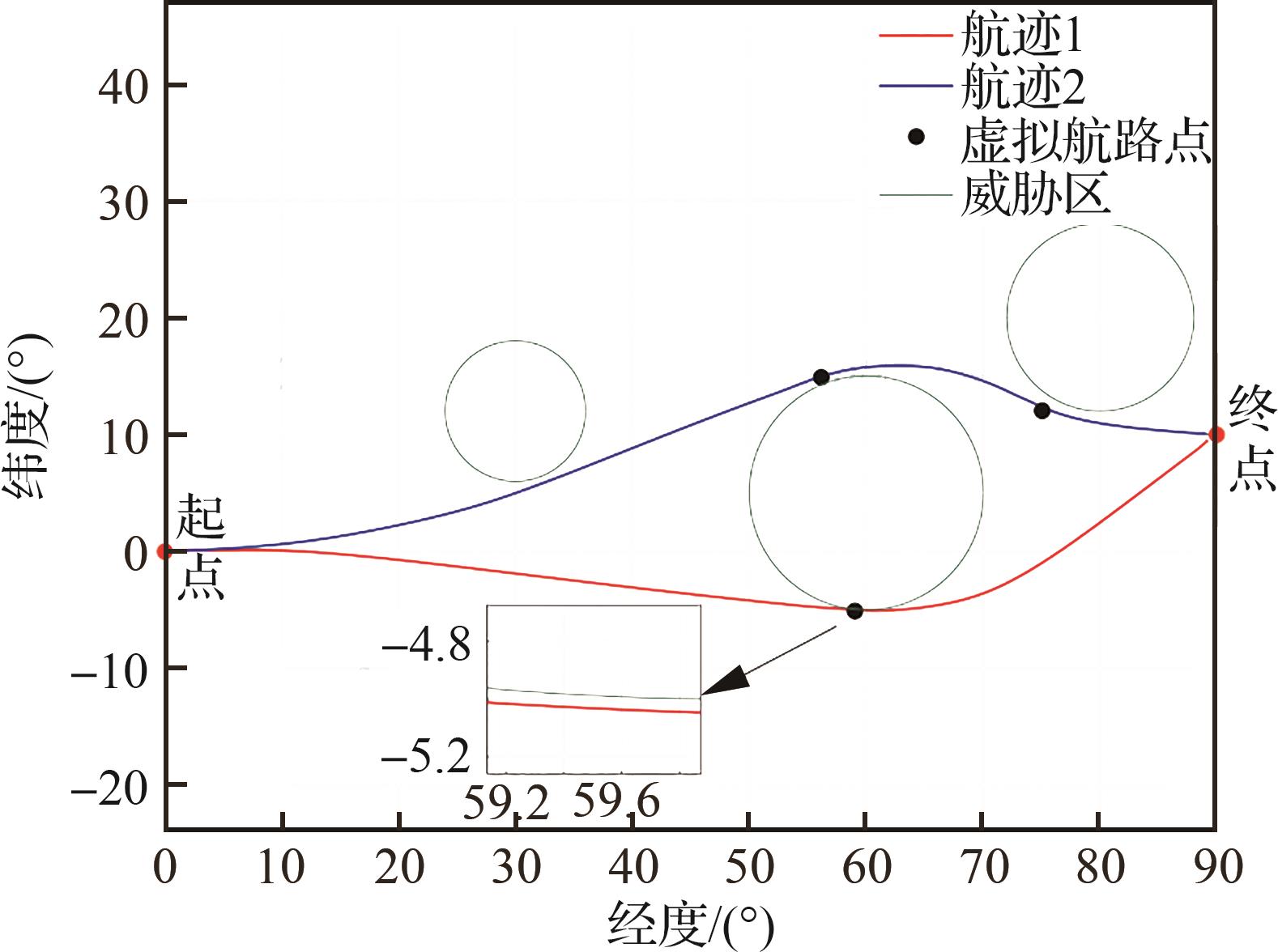

图 23
高度-速度变化

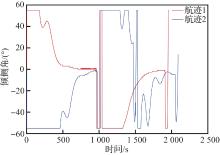
图 24
倾侧角变化
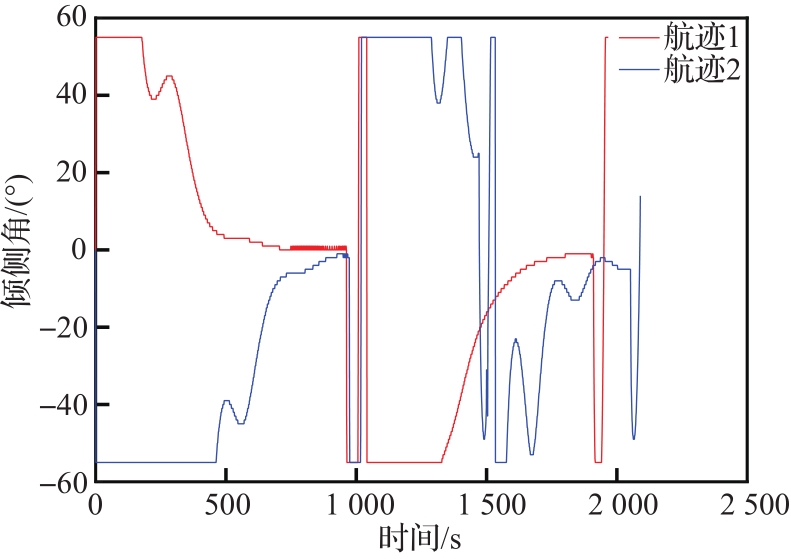

图 25
剩余能量变化


图 26
蒙特卡洛模拟下平面轨迹
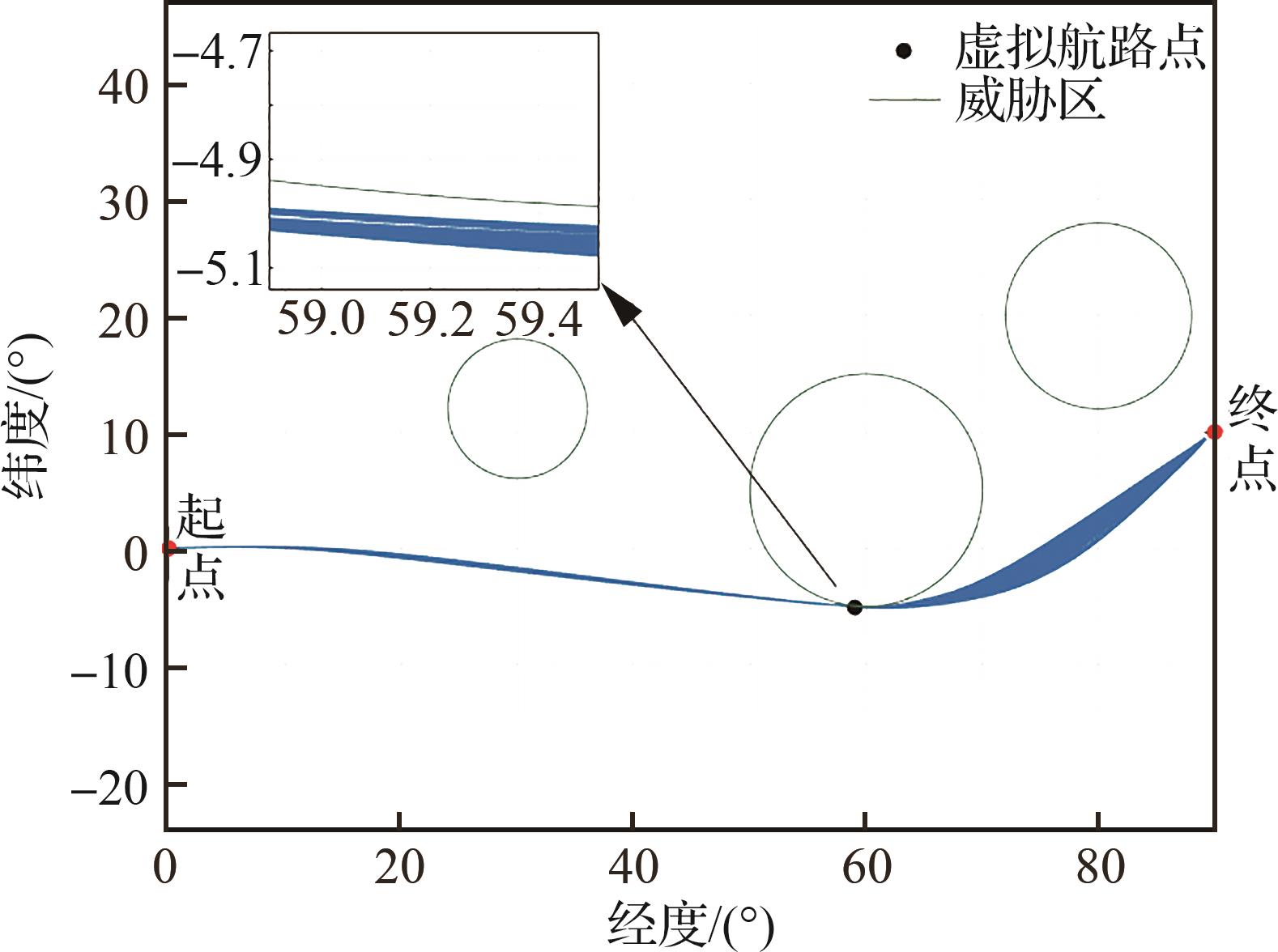

图 27
蒙特卡洛模拟下高度-速度变化结果
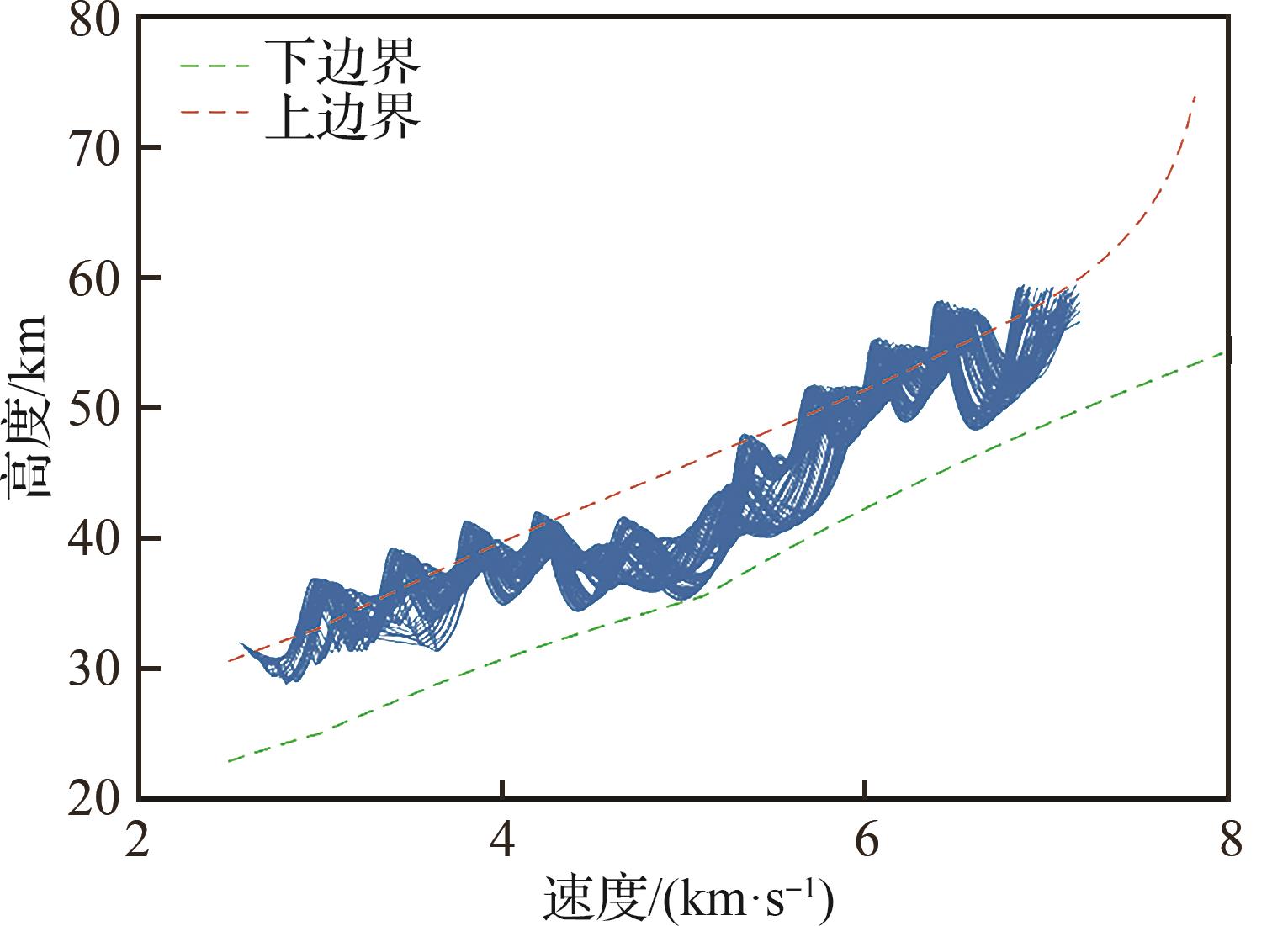
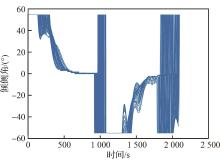
图 28
蒙特卡洛模拟下倾侧角变化结果


图 29
蒙特卡洛模拟下剩余能量变化结果
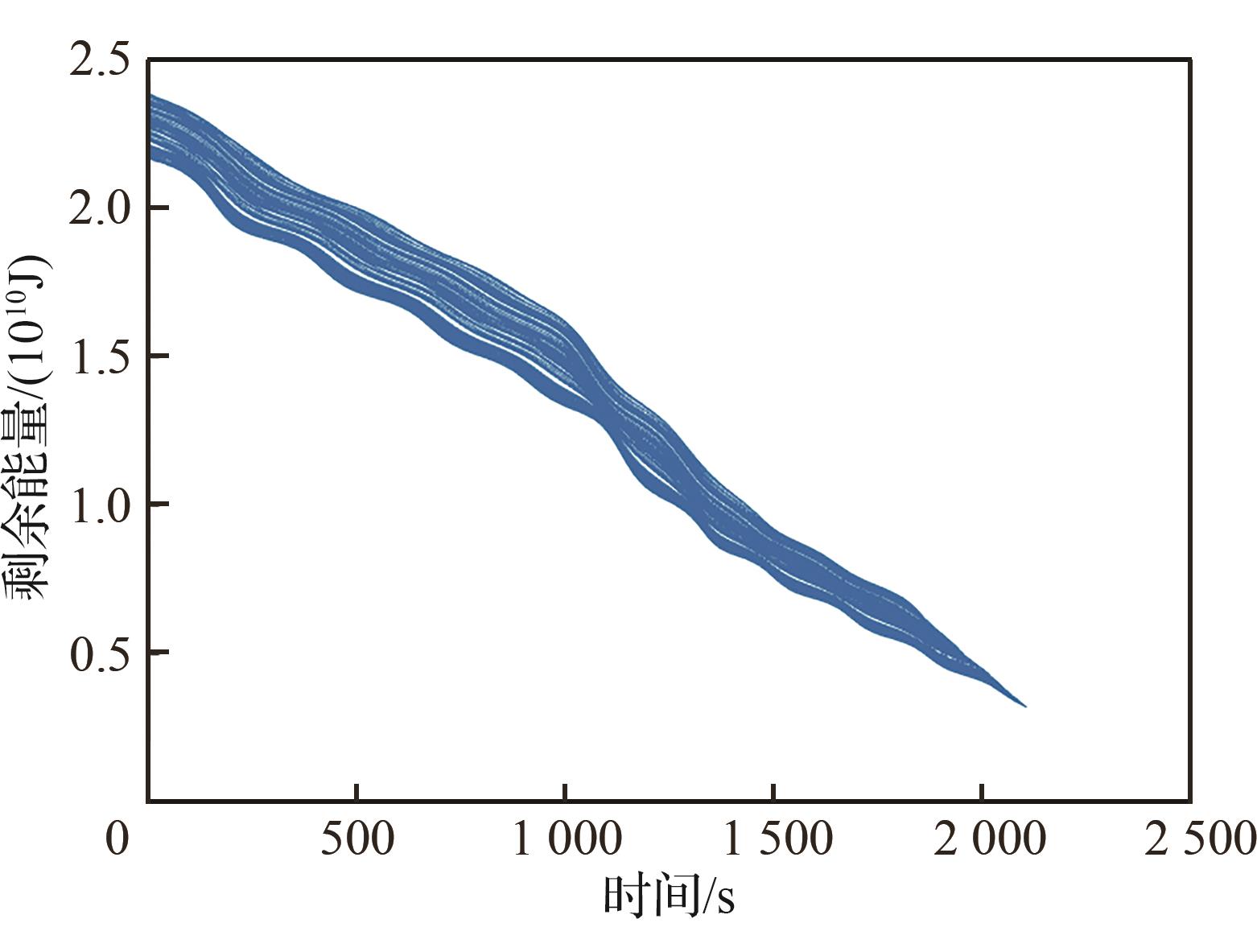
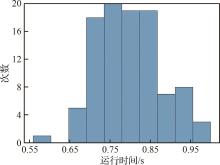
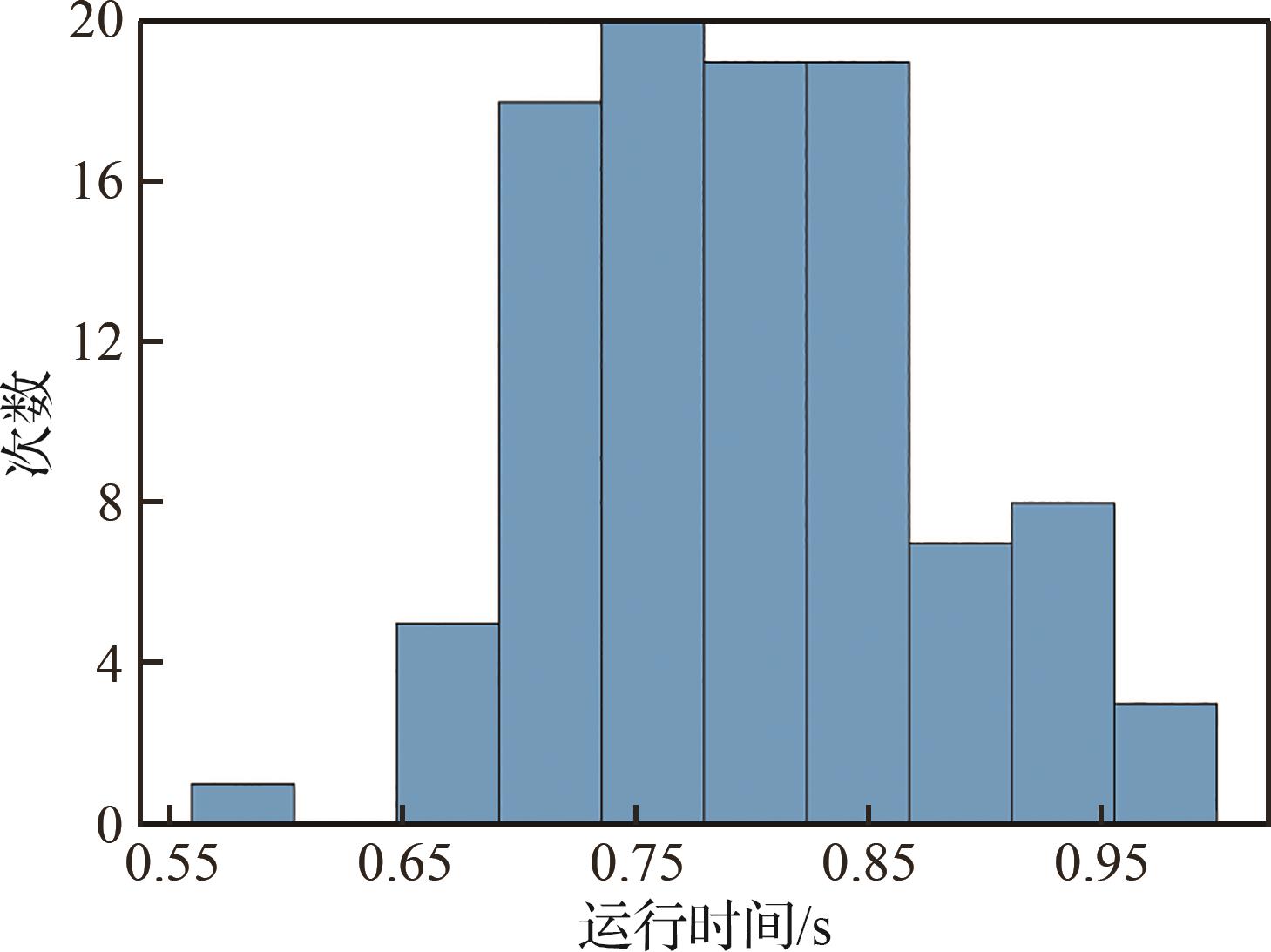
图 30
运行时间分布图
| 1 | 张远龙, 谢愈. 滑翔飞行器弹道规划与制导方法综述[J]. 航空学报, 2020, 41(1): 023377. |
| ZHANG Y L, XIE Y. Review of trajectory planning and guidance methods for gliding vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 023377 (in Chinese). | |
| 2 | FARIDI A Q, SHARMA S, SHUKLA A, et al. Multi-robot multi-target dynamic path planning using artificial bee colony and evolutionary programming in unknown environment[J]. Intelligent Service Robotics, 2018, 11(2): 171-186. |
| 3 | GUO T, JIANG N, LI B Y, et al. UAV navigation in high dynamic environments: A deep reinforcement learning approach[J]. Chinese Journal of Aeronautics, 2021, 34(2): 479-489. |
| 4 | KONG X D, PAN B, CHERKASHIN E, et al. Multi-constraint UAV fast path planning based on improved A* algorithm[J]. Journal of Physics: Conference Series, 2020, 1624(4): 042009. |
| 5 | 黄长强, 国海峰, 丁达理. 高超声速滑翔飞行器轨迹优化与制导综述[J]. 宇航学报, 2014, 35(4): 369-379. |
| HUANG C Q, GUO H F, DING D L. A survey of trajectory optimization and guidance for hypersonic gliding vehicle[J]. Journal of Astronautics, 2014, 35(4): 369-379 (in Chinese). | |
| 6 | 赵吉松, 尚腾, 张金明, 等. 带有控制变量变化率约束的伪谱轨迹优化方法[J]. 宇航学报, 2022, 43(10): 1368-1377. |
| ZHAO J S, SHANG T, ZHANG J M, et al. Pseudo-spectral trajectory optimization method with constraint on the change rate of control variables[J]. Journal of Astronautics, 2022, 43(10): 1368-1377 (in Chinese). | |
| 7 | 宋超, 黎志强, 刘旭. 考虑航路点的飞行器再入轨迹优化与仿真[J]. 航空计算技术, 2019, 49(1): 19-23. |
| SONG C, LI Z Q, LIU X. Reentry trajectory optimization and simulation of aircraft with waypoints considered[J]. Aeronautical Computing Technique, 2019, 49(1): 19-23 (in Chinese). | |
| 8 | 梅映雪, 冯玥, 王容顺, 等. 高超声速飞行器多约束再入轨迹快速优化[J]. 宇航学报, 2019, 40(7): 758-767. |
| MEI Y X, FENG Y, WANG R S, et al. Fast optimization of reentry trajectory for hypersonic vehicles with multiple constraints[J]. Journal of Astronautics, 2019, 40(7): 758-767 (in Chinese). | |
| 9 | 刘哲, 贾生伟, 张鸣, 等. 再入轨迹多约束模型预测静态凸规划方法[J]. 宇航学报, 2022, 43(12): 1638-1651. |
| LIU Z, JIA S W, ZHANG M, et al. Reentry trajectory optimization based on constrained model predictive static convex programming[J]. Journal of Astronautics, 2022, 43(12): 1638-1651 (in Chinese). | |
| 10 | 高长生, 陈尔康, 荆武兴. 高超声速飞行器机动规避轨迹优化[J]. 哈尔滨工业大学学报, 2017, 49(4): 16-21. |
| GAO C S, CHEN E K, JING W X. Maneuver evasion trajectory optimization for hypersonic vehicles[J]. Journal of Harbin Institute of Technology, 2017, 49(4): 16-21 (in Chinese). | |
| 11 | ZHAO J, ZHOU R. Reentry trajectory optimization for hypersonic vehicle satisfying complex constraints[J]. Chinese Journal of Aeronautics, 2013, 26(6): 1544-1553. |
| 12 | 王路, 邢清华, 毛艺帆. 复杂约束条件下再入高超声速滑翔飞行器轨迹快速优化[J]. 固体火箭技术, 2016, 39(6): 839-846, 862. |
| WANG L, XING Q H, MAO Y F. Trajectory rapid optimization for reentry hypersonic glide vehicle satisfying complex constraints[J]. Journal of Solid Rocket Technology, 2016, 39(6): 839-846, 862 (in Chinese). | |
| 13 | 谢愈, 潘亮, 谷学强, 等. 高超声速飞行器多目标复杂约束滑翔弹道优化[J]. 国防科技大学学报, 2017, 39(2): 9-17. |
| XIE Y, PAN L, GU X Q, et al. Gliding trajectory optimization with multiple objectives and complicated constraints for hypersonic vehicles[J]. Journal of National University of Defense Technology, 2017, 39(2): 9-17 (in Chinese). | |
| 14 | WANG X, GUO J, TANG S J, et al. Entry trajectory planning with terminal full states constraints and multiple geographic constraints[J]. Aerospace Science and Technology, 2019, 84: 620-631. |
| 15 | 李帅聪, 何睿智, 汤国建, 等. 基于滑模控制的剖面跟踪制导律[J]. 航空学报, 2020, 41(S2): 724578. |
| LI S C, HE R Z, TANG G J, et al. Profile tracking guidance law based on sliding mode control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724578 (in Chinese). | |
| 16 | XIE Y, LIU L H, TANG G J, et al. Highly constrained entry trajectory generation[J]. Acta Astronautica, 2013, 88: 44-60. |
| 17 | 姜鹏, 郭栋, 韩亮, 等. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41(S1): 723776. |
| JIANG P, GUO D, HAN L, et al. Trajectory optimization for cooperative reentry of multiple hypersonic glide vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723776 (in Chinese). | |
| 18 | ZHANG D, LIU L, WANG Y J. On-line reentry guidance algorithm with both path and no-fly zone constraints[J]. Acta Astronautica, 2015, 117: 243-253. |
| 19 | HE R Z, LIU L H, TANG G J, et al. Entry trajectory generation without reversal of bank angle[J]. Aerospace Science and Technology, 2017, 71: 627-635. |
| 20 | 惠俊鹏, 汪韧, 俞启东. 基于强化学习的再入飞行器“新质”走廊在线生成技术[J]. 航空学报, 2022, 43(9): 325960. |
| HUI J P, WANG R, YU Q D. Generating new quality flight corridor for reentry aircraft based on reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 325960 (in Chinese). | |
| 21 | XU H, CAI G B, ZHANG S X, et al. Hypersonic reentry trajectory optimization by using improved sparrow search algorithm and control parametrization method[J]. Advances in Space Research, 2022, 69(6): 2512-2524. |
| 22 | JIANG Z Y, GE J Q, XU Q Q, et al. Fast trajectory optimization for gliding reentry vehicle based on improved sparrow search algorithm[J]. Journal of Physics: Conference Series, 2021, 1986(1): 012114. |
| 23 | SHAHZAD SANA K, HU W D. Hypersonic reentry trajectory planning by using hybrid fractional-order particle swarm optimization and gravitational search algorithm[J]. Chinese Journal of Aeronautics, 2021, 34(1): 50-67. |
| 24 | LIANG Z X, REN Z. Tentacle-based guidance for entry flight with No-fly zone constraint[J]. Journal of Guidance, Control, and Dynamics, 2017, 41(4): 996-1005. |
| 25 | 高杨, 蔡光斌, 张胜修, 等. 多禁飞区高超声速滑翔飞行器再入机动制导[J]. 兵器装备工程学报, 2019, 40(8): 32-39. |
| GAO Y, CAI G B, ZHANG S X, et al. Reentry maneuver guidance for hypersonic glide vehicles under multiple No-fly zones[J]. Journal of Ordnance Equipment Engineering, 2019, 40(8): 32-39 (in Chinese). | |
| 26 | 高杨, 蔡光斌, 徐慧, 等. 虚拟多触角探测的高超声速滑翔飞行器再入机动制导[J]. 航空学报, 2020, 41(11): 623703. |
| GAO Y, CAI G B, XU H, et al. Reentry maneuver guidance of hypersonic glide vehicle under virtual multi-tentacle detection[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(11): 623703 (in Chinese). | |
| 27 | HE R Z, LIU L H, TANG G J, et al. Rapid generation of entry trajectory with multiple no-fly zone constraints[J]. Advances in Space Research, 2017, 60(7): 1430-1442. |
| 28 | 申连杰. 高超声速滑翔飞行器机动策略与制导方法研究[D]. 长沙: 国防科学技术大学, 2015: 25-30. |
| SHEN L J. Research on maneuver strategy and guidance algorithm for hypersonic glide vehicles[D]. Changsha: National University of Defense Technology, 2015: 25-30 (in Chinese). | |
| 29 | 张源, 张冉, 李惠峰. 复杂禁飞区高超声速飞行器路径—轨迹双层规划[J]. 宇航学报, 2022, 43(5): 615-627. |
| ZHANG Y, ZHANG R, LI H F. Dual-level path-trajectory generation with complex No-fly zone constraints for hypersonic vehicle[J]. Journal of Astronautics, 2022, 43(5): 615-627 (in Chinese). | |
| 30 | ZHANG Y, ZHANG R, LI H F. Graph-based path decision modeling for hypersonic vehicles with no-fly zone constraints[J]. Aerospace Science and Technology, 2021, 116: 106857. |
| 31 | VINH N X, BUSEMANN A, CULP R D. Hypersonic and planetary entry flight mechanics[M]. Ann Arbor: University of Michigan Press, 1980. |
| 32 | 吕志平, 乔书波. 大地测量学基础[M]. 2版. 北京: 测绘出版社, 2016: 210-231. |
| LÜ/LV/LU/LYU) Z P, QIAO S B. Fundamentals of geodesy[M]. 2nd ed. Beijing: Sino Maps Press, 2016: 210-231 (in Chinese). | |
| 33 | Phillips T H. A common aero vehicle (CAV) model, description, and employment guide[R]. Arlington: Schafer Corporation for AFRL and AFSPC, 2003. |
| [1] | 王振威, 刘凯, 郭健, 刘晓鹏. 一种基于领导⁃跟随策略的多无人机⁃多无人艇编队协同机制[J]. 航空学报, 2023, 44(S2): 729791-729791. |
| [2] | 高显忠, 邓小龙, 王玉杰, 郭正, 侯中喜. 临近空间太阳能飞机能量最优飞行航迹规划方法展望[J]. 航空学报, 2023, 44(8): 27265-027265. |
| [3] | 刘衍旭, 陈树生, 冯聪, 顾奕然, 高正红. 高超声速滑翔飞行器锐边化气动隐身一体化设计[J]. 航空学报, 2023, 44(16): 128093-128093. |
| [4] | 郭琪磊, 桑为民, 牛俊杰, 袁烨. 复杂气象条件下考虑结冰风险的无人机飞行策略[J]. 航空学报, 2023, 44(1): 627518-627518. |
| [5] | 谢华, 黎子弘, 杨磊, 朱永文, 刘芳子. 容量受限下城市对航班四维航迹优化[J]. 航空学报, 2022, 43(8): 325581-325581. |
| [6] | 李宇辉, 赵敏, 陈奇, 姚敏, 何紫阳. 复杂环境下翼伞系统的组合式航迹规划[J]. 航空学报, 2021, 42(6): 324566-324566. |
| [7] | 杨磊, 李文博, 刘芳子, 陈雨童, 赵征. 柔性空域结构下连续下降航迹多目标优化[J]. 航空学报, 2021, 42(2): 324157-324157. |
| [8] | 李宪强, 马戎, 张伸, 侯砚泽, 裴毅飞. 蚁群算法的改进设计及在航迹规划中的应用[J]. 航空学报, 2020, 41(S2): 724381-724381. |
| [9] | 姜鹏, 郭栋, 韩亮, 李清东, 任章. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41(S1): 723776-723776. |
| [10] | 陈奇, 赵敏, 李宇辉, 何紫阳. 基于梯度下降法的翼伞系统最优分段航迹规划[J]. 航空学报, 2020, 41(12): 324226-324226. |
| [11] | 高杨, 蔡光斌, 徐慧, 杨小冈, 张胜修. 虚拟多触角探测的高超声速滑翔飞行器再入机动制导[J]. 航空学报, 2020, 41(11): 623703-623703. |
| [12] | 陈尔康, 荆武兴, 高长生. 弹性高超声速滑翔飞行器的状态/参数联合估计[J]. 航空学报, 2019, 40(8): 322992-322992. |
| [13] | 刘海涛, 顾新宇, 方晓钰, 李冬霞. 频率选择性衰落信道DS-CDMA无人机中继通信系统航迹规划[J]. 航空学报, 2019, 40(7): 322633-322633. |
| [14] | 何磊, 闫晓东, 唐硕. 螺旋俯冲机动突防的制导律设计[J]. 航空学报, 2019, 40(5): 322457-322457. |
| [15] | 王肖, 郭杰, 唐胜景, 祁帅. 基于解析剖面的时间协同再入制导[J]. 航空学报, 2019, 40(3): 322565-322565. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学