张宇桐, 宋建梅, 丁艳( ), 刘锦鹏
), 刘锦鹏
收稿日期:2022-06-14
修回日期:2022-08-04
接受日期:2022-09-15
出版日期:2023-05-25
发布日期:2022-09-30
通讯作者:
丁艳
E-mail:dingyan@bit.edu.cn
基金资助:
Yutong ZHANG, Jianmei SONG, Yan DING(), Jinpeng LIU
Received:2022-06-14
Revised:2022-08-04
Accepted:2022-09-15
Online:2023-05-25
Published:2022-09-30
Contact:
Yan DING
E-mail:dingyan@bit.edu.cn
Supported by:摘要:
SLAM技术在卫星导航拒止环境下的自主导航中有着广泛的应用前景。结合单目鱼眼SLAM可获取更多纹理信息的优势和RGBD-SLAM可直接获取尺度信息的优势,设计基于单目鱼眼相机和RGBD相机的异构协同SLAM系统。首先设计特征点对三维灰度质心方向一致性检验方法以筛选异构图像之间的候选匹配点。然后设计异构图像之间的分步式光流-投影匹配方法,以实现鱼眼相机和RGBD相机之间高性能的特征点匹配与相对位姿估计。最后基于ORB-SLAM2框架,提出基于鱼眼相机和RGBD相机的异构协同SLAM系统框架。实验结果表明:相比于传统的特征点匹配方法,设计的特征匹配方法在异构相机的图像特征匹配任务中能够表现出更高的性能。相比于单目鱼眼SLAM系统和RGBD-SLAM系统,提出的异构协同SLAM系统在相机快速移动、相机贴近景物、低帧率、纹理缺失等条件下,以及在相机纯旋转运动、室外大场景等条件下性能更优,其鲁棒性、抗轨迹漂移能力和轨迹精度比单目鱼眼SLAM系统和RGBD-SLAM系统都有较大提升。
中图分类号:
张宇桐, 宋建梅, 丁艳, 刘锦鹏. 基于鱼眼相机和RGBD相机的异构协同SLAM[J]. 航空学报, 2023, 44(10): 327621-327621.
Yutong ZHANG, Jianmei SONG, Yan DING, Jinpeng LIU. Heterogeneous collaborative SLAM based on fisheye and RGBD cameras[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327621-327621.

图1
异构协同SLAM系统框图
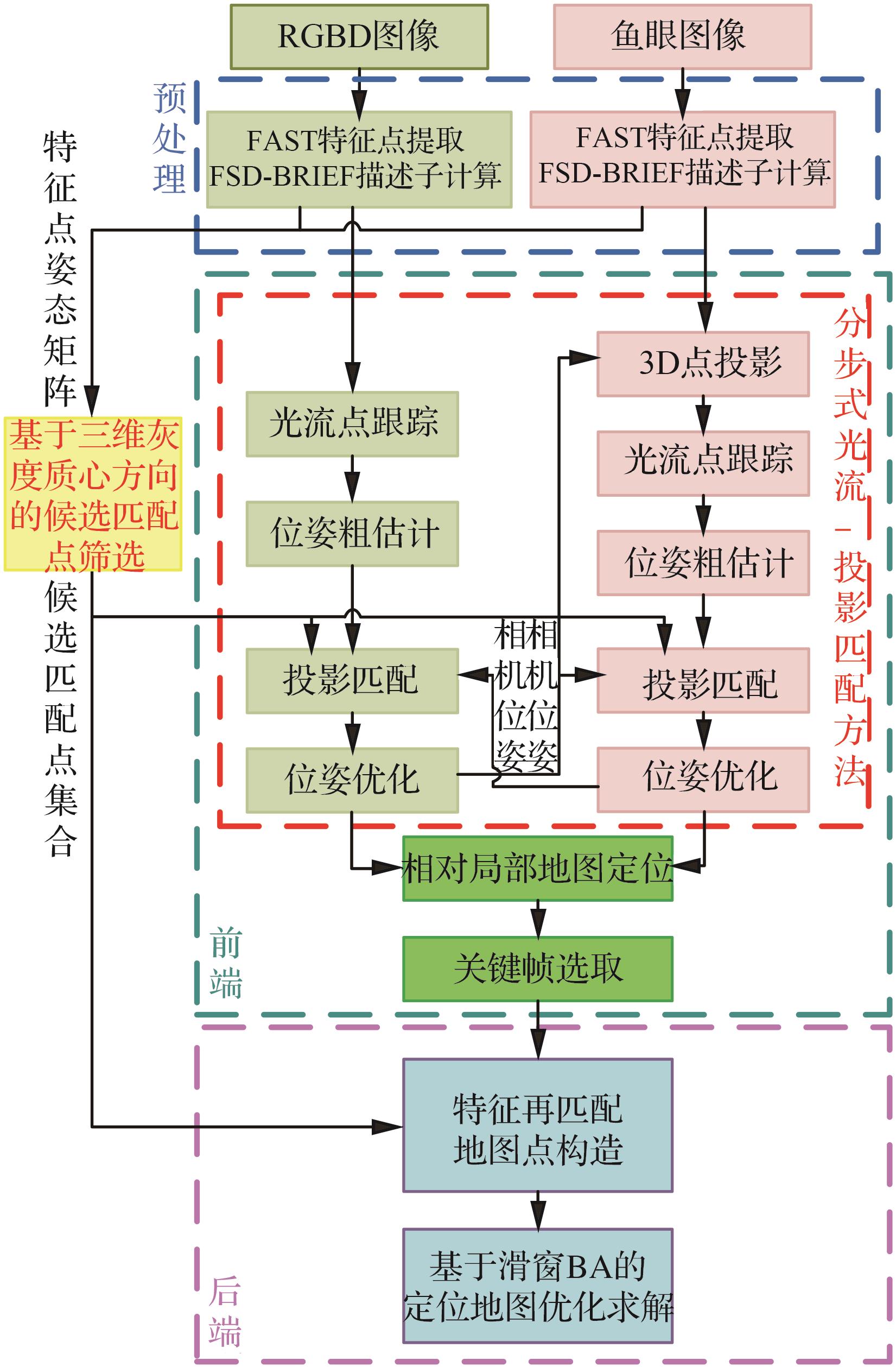

图2
FSD-BRIEF特征示意图
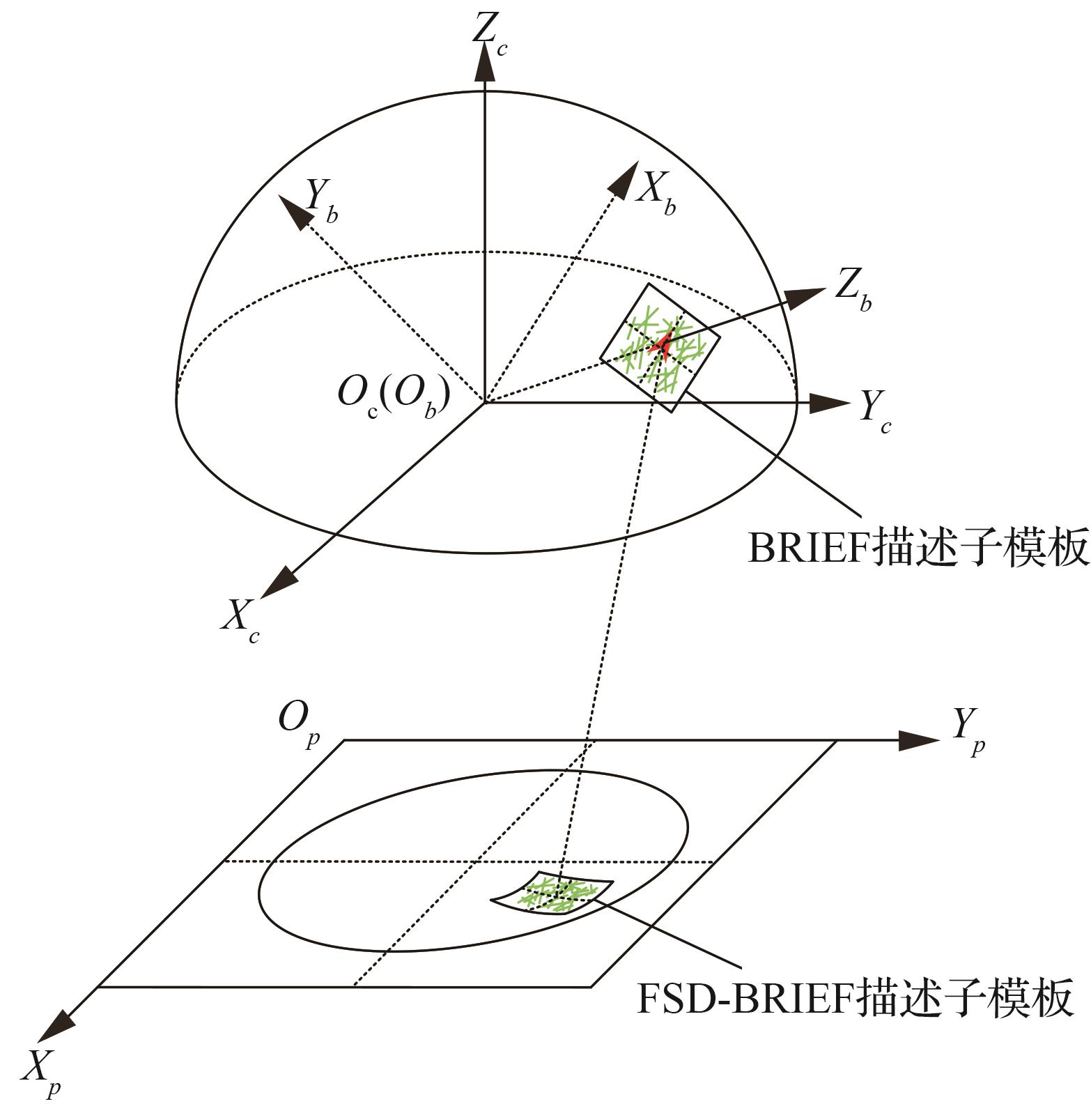
图3
相机中的特征点姿态坐标系示意图
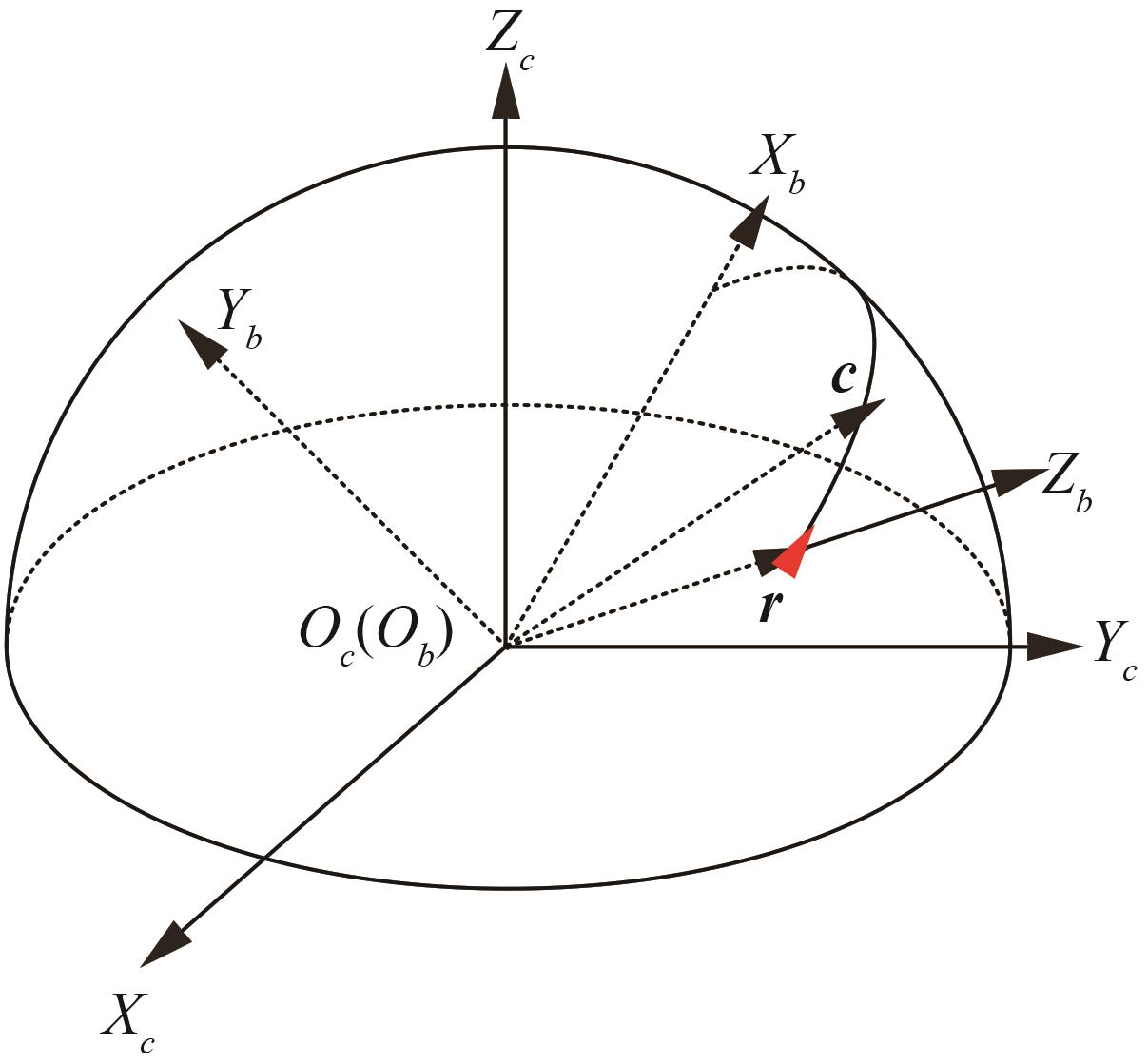

图4
匹配特征点的方向一致性原理示意图
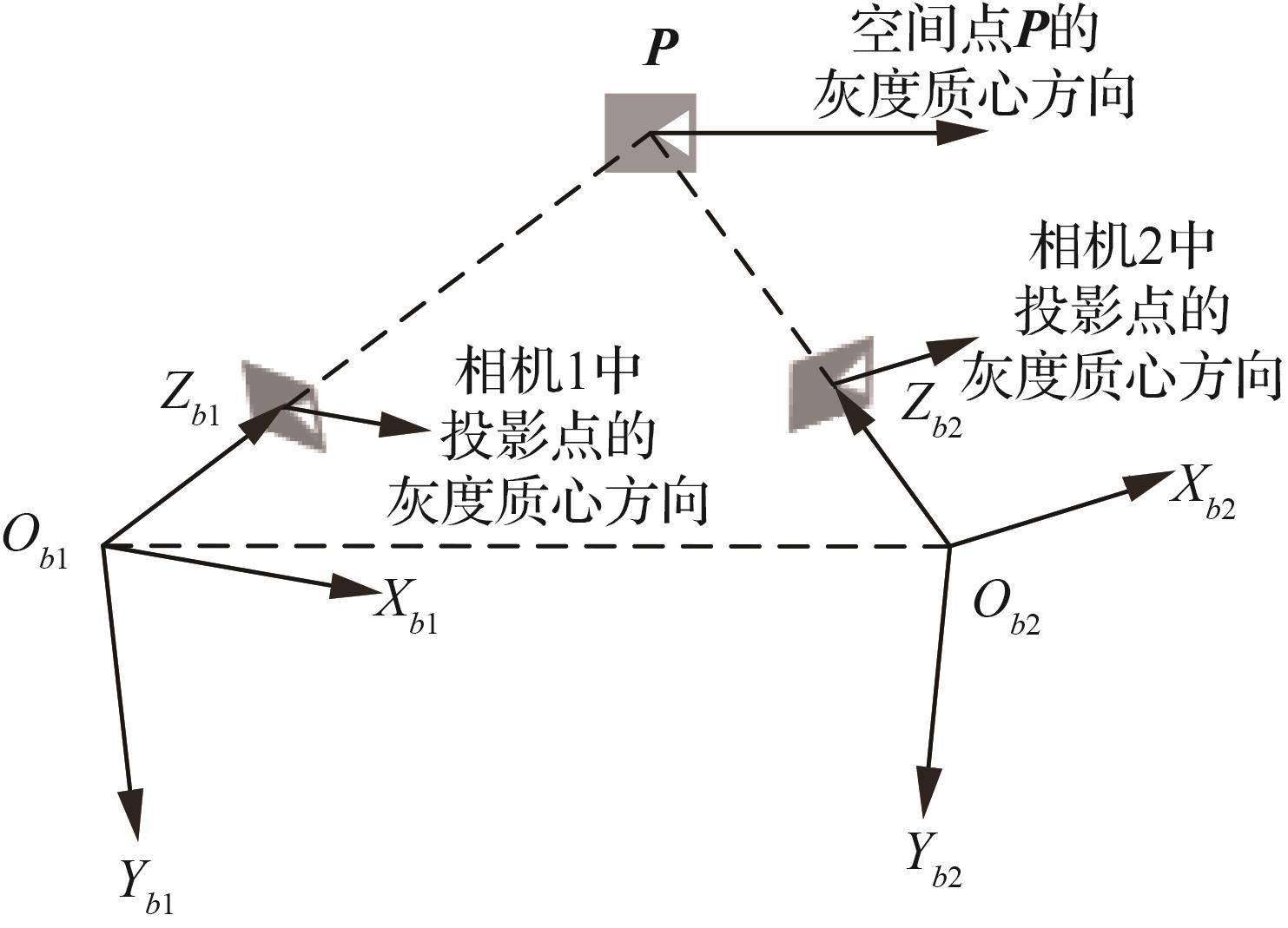
图5
特征点方向一致性中的几何变量图
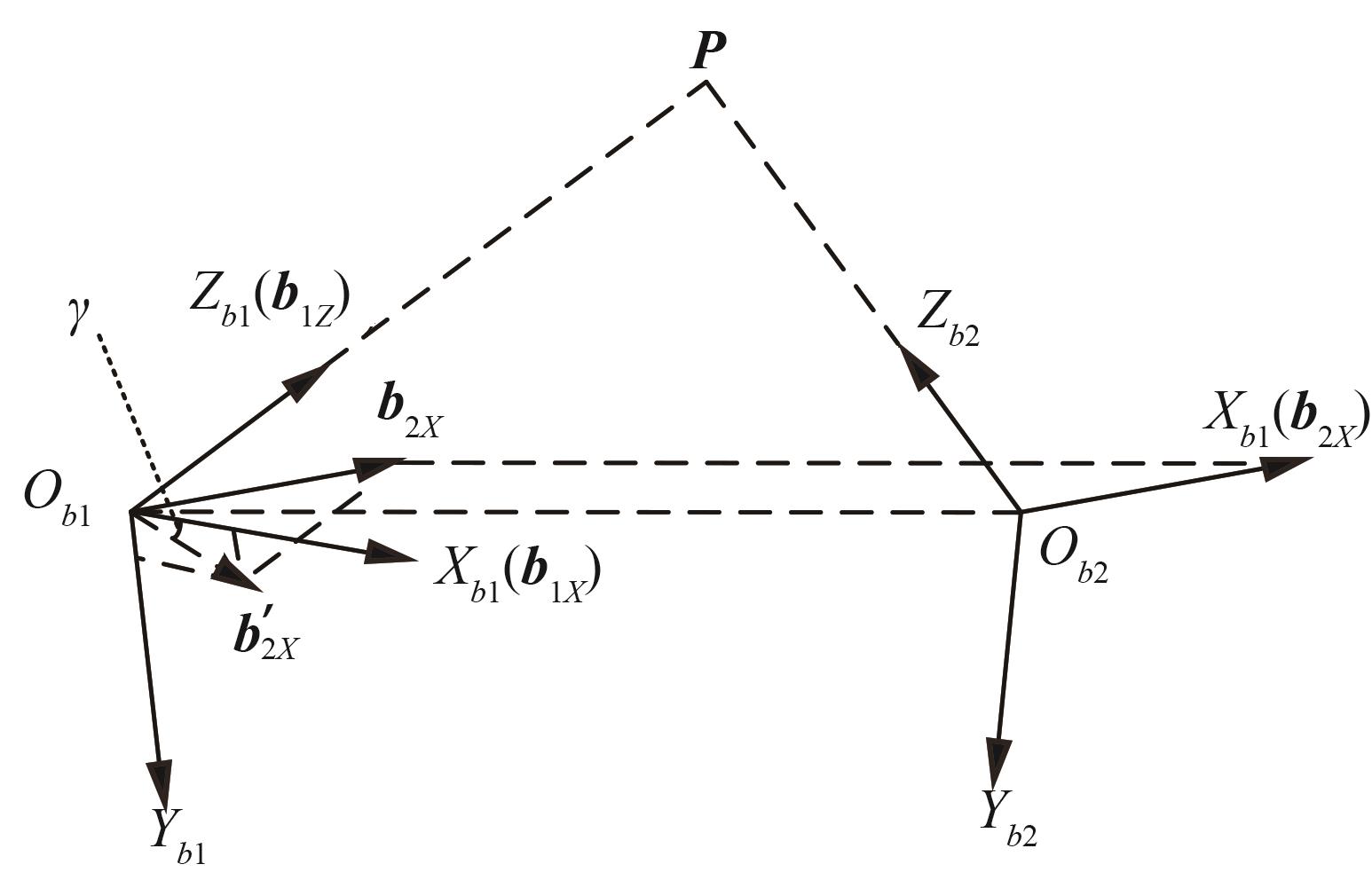

图6
用于测试特征匹配算法的靶标图案


图7
鱼眼相机和RGBD相机拍摄的部分示例图片


图8
2个版本匹配算法的PR曲线结果


图9
鱼眼图像分步式光流-投影匹配过程示意图
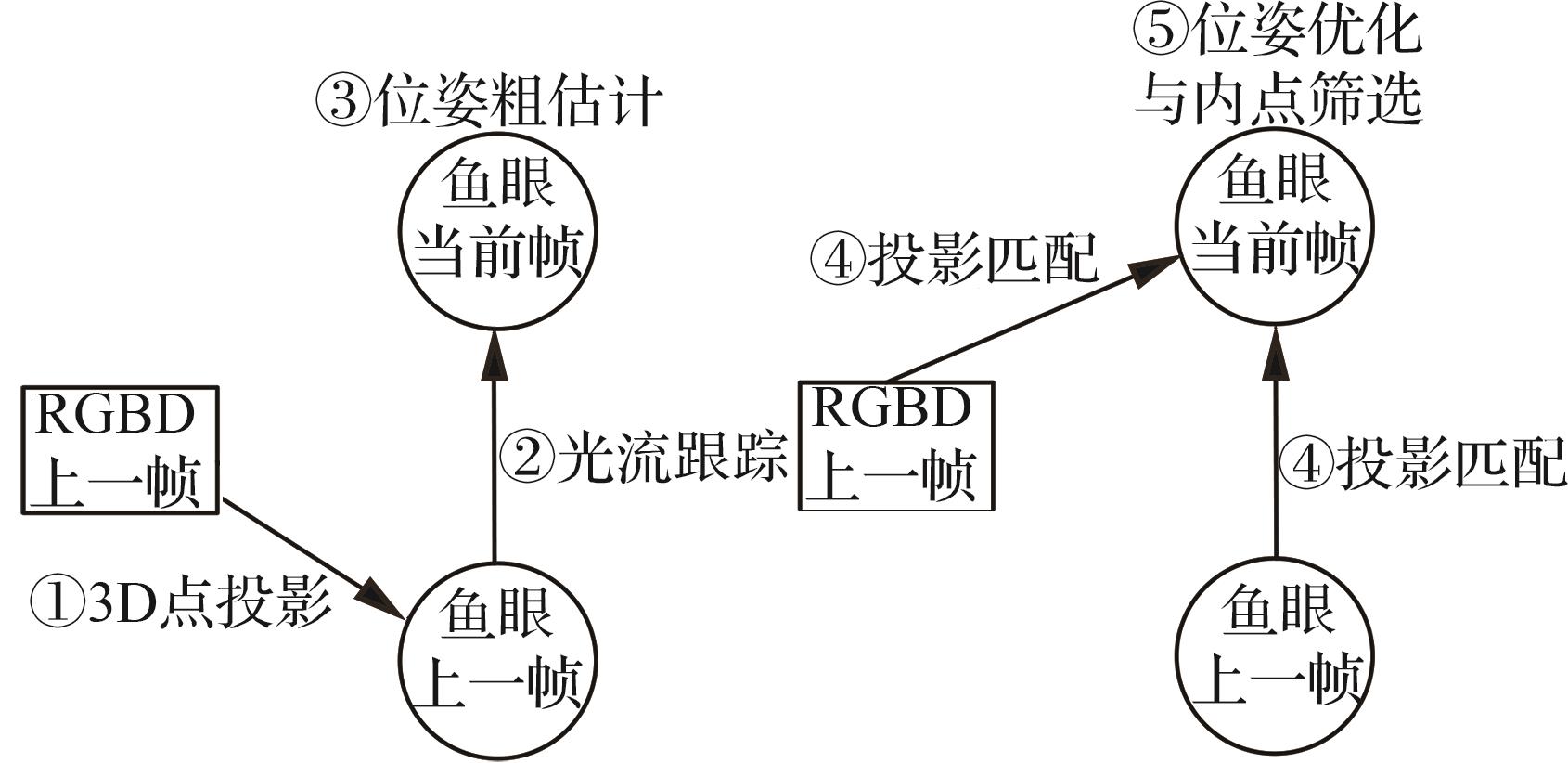
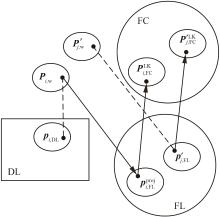
图10
鱼眼相机当前帧光流跟踪过程示意图
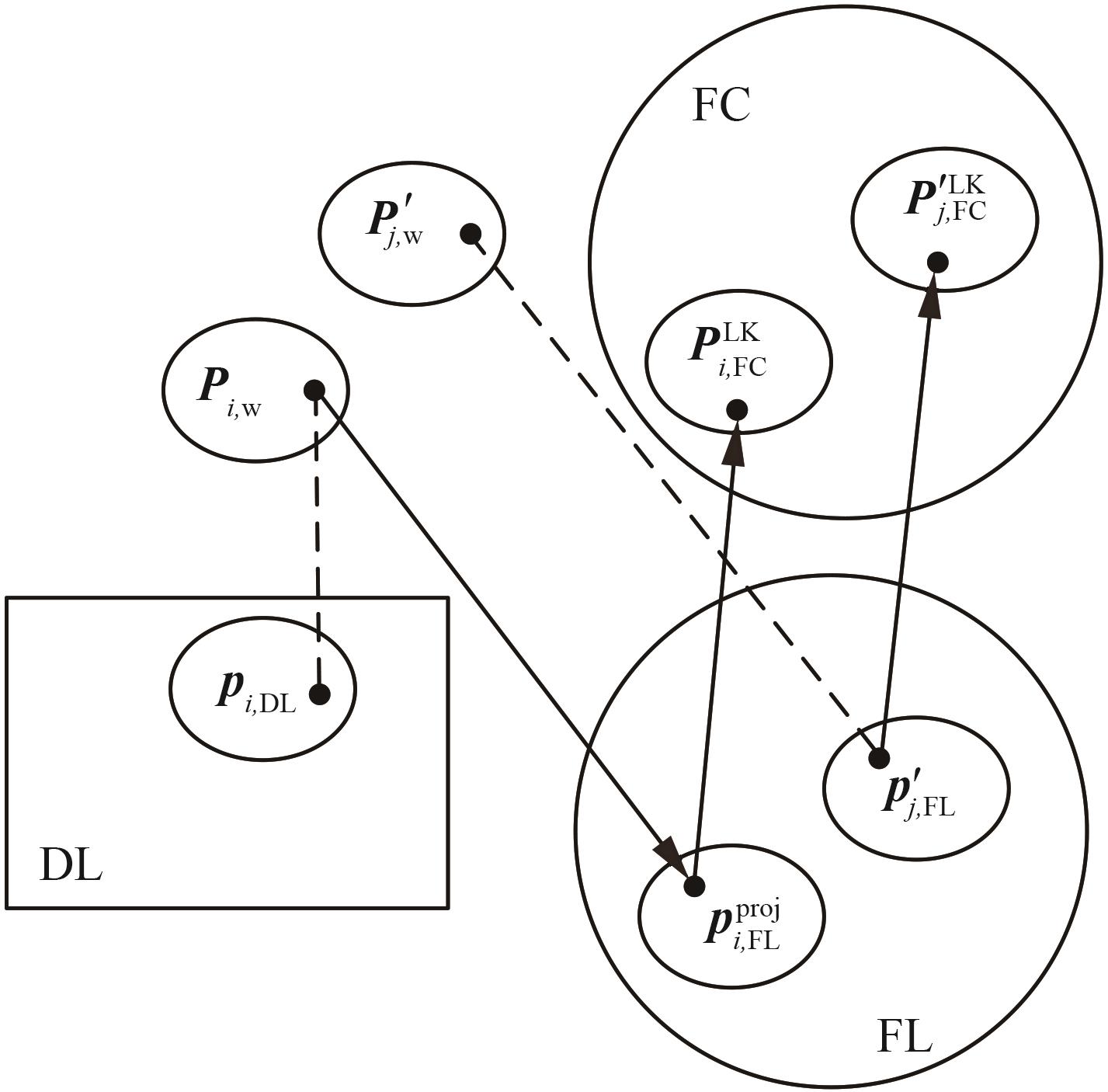
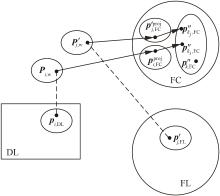
图11
鱼眼相机当前帧投影匹配过程示意图

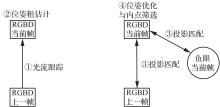
图12
RGBD图像分步式光流-投影匹配过程示意图
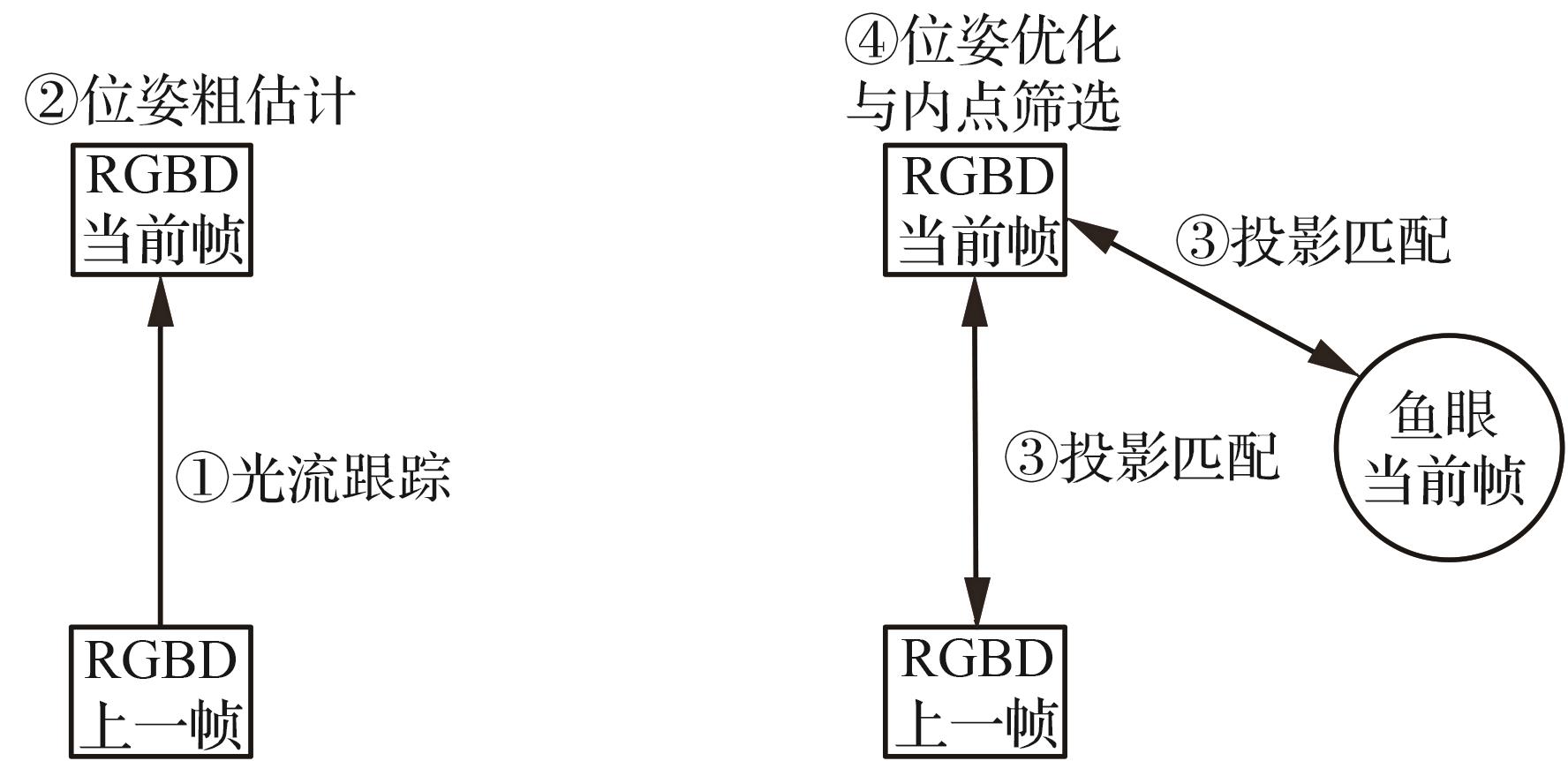
图13
RGBD相机当前帧光流跟踪过程示意图
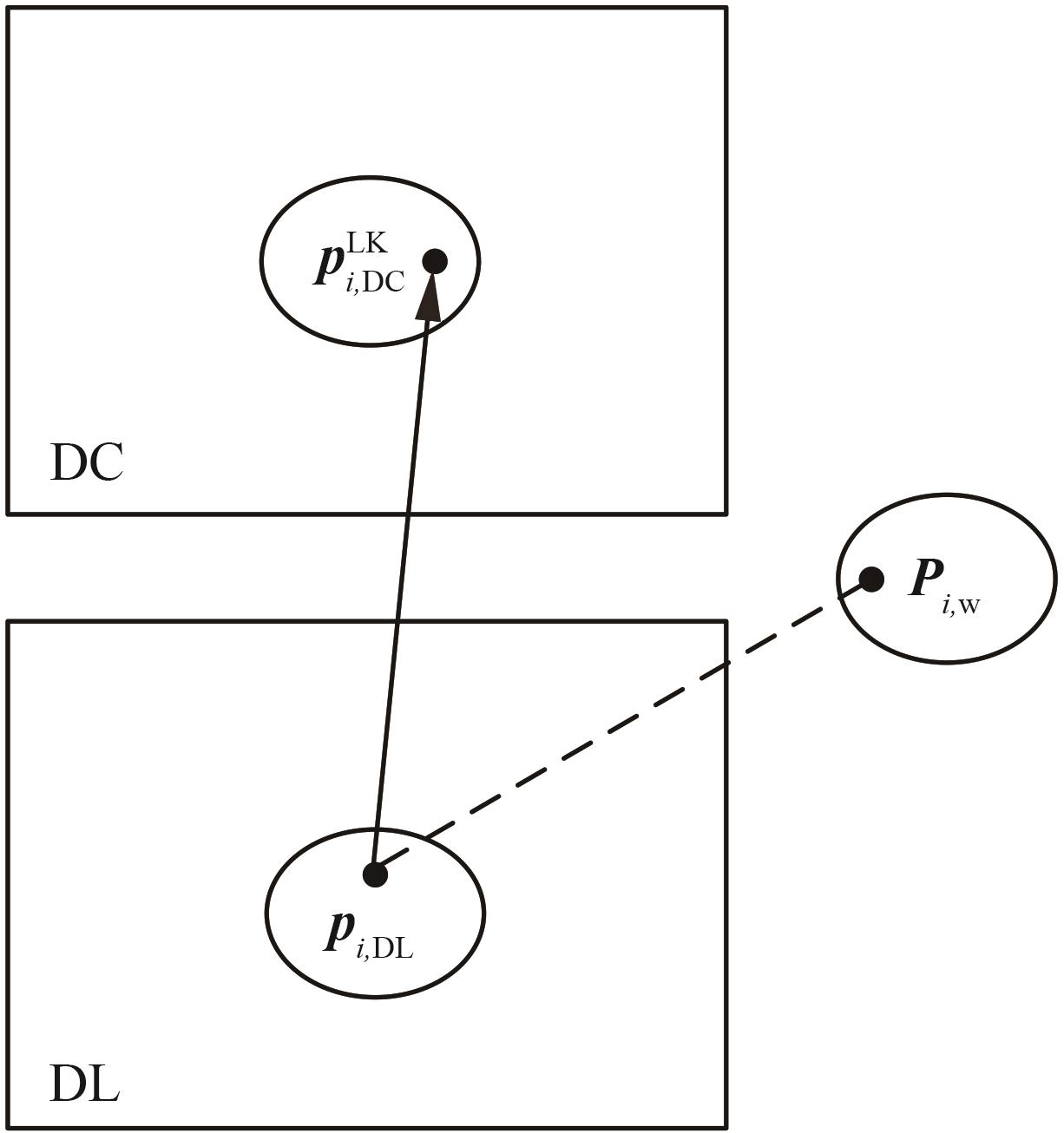

图14
RGBD相机当前帧投影匹配过程示意图
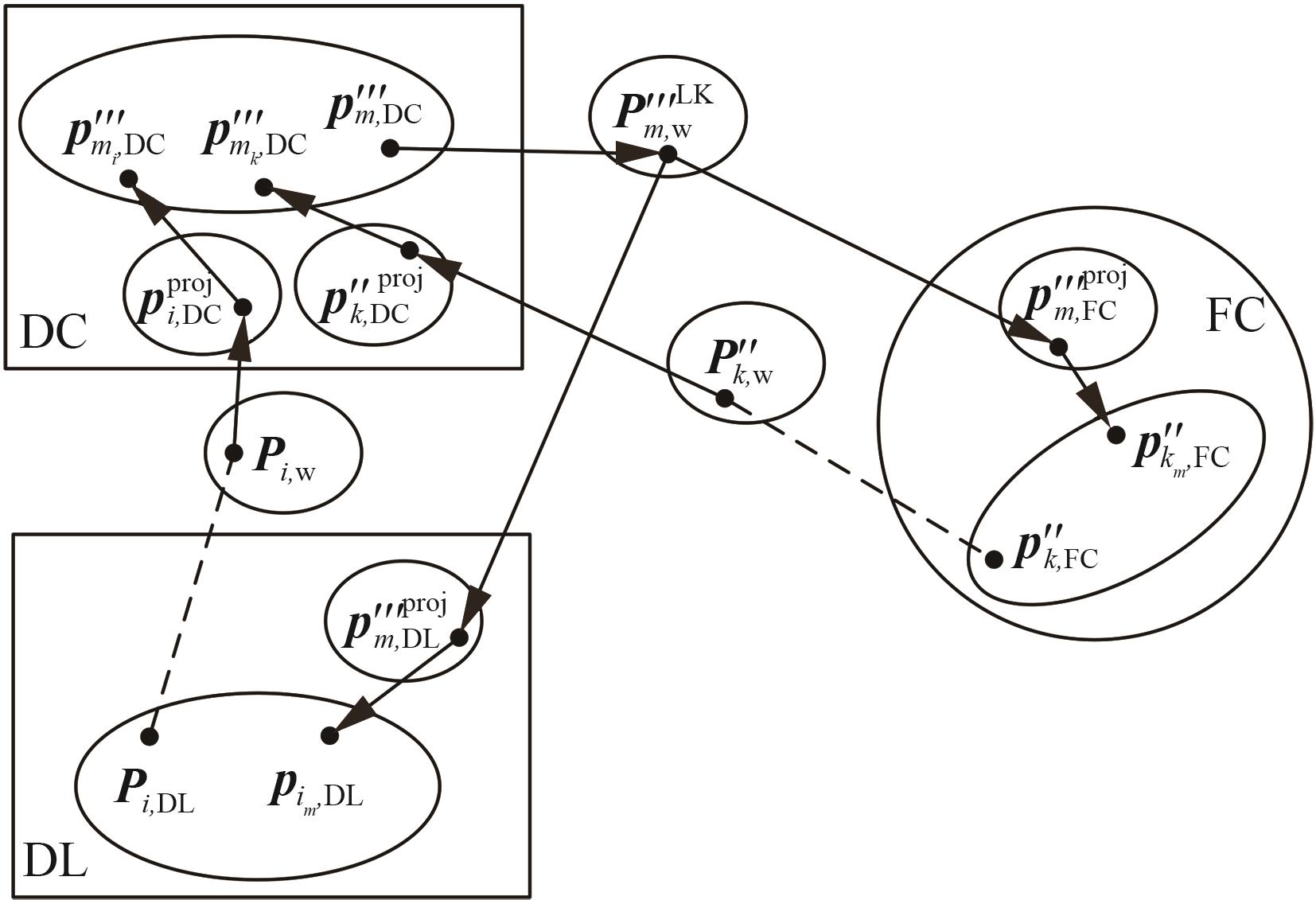
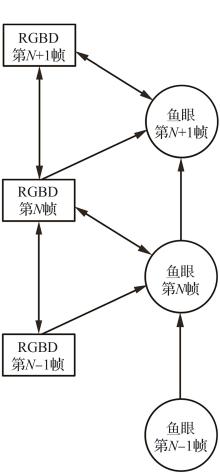
图15
分步式光流-投影匹配方法在异构图像流中的迭代运行示意图

图16
新关键帧的共视帧和共视点关系示意图
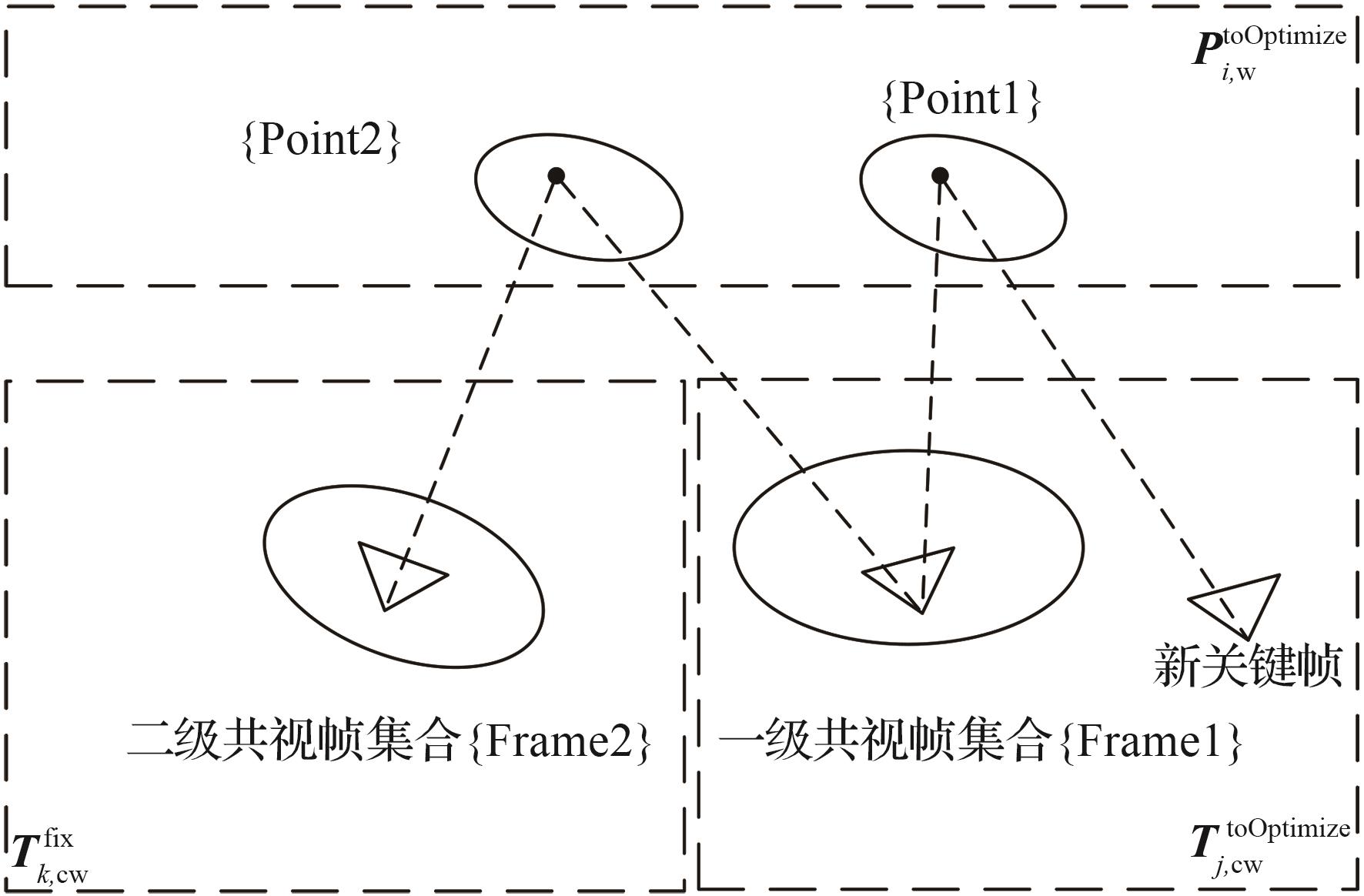
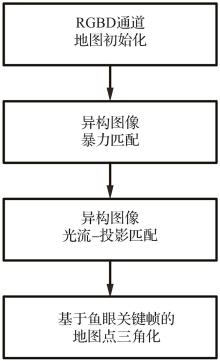
图17
异构协同SLAM系统初始化流程
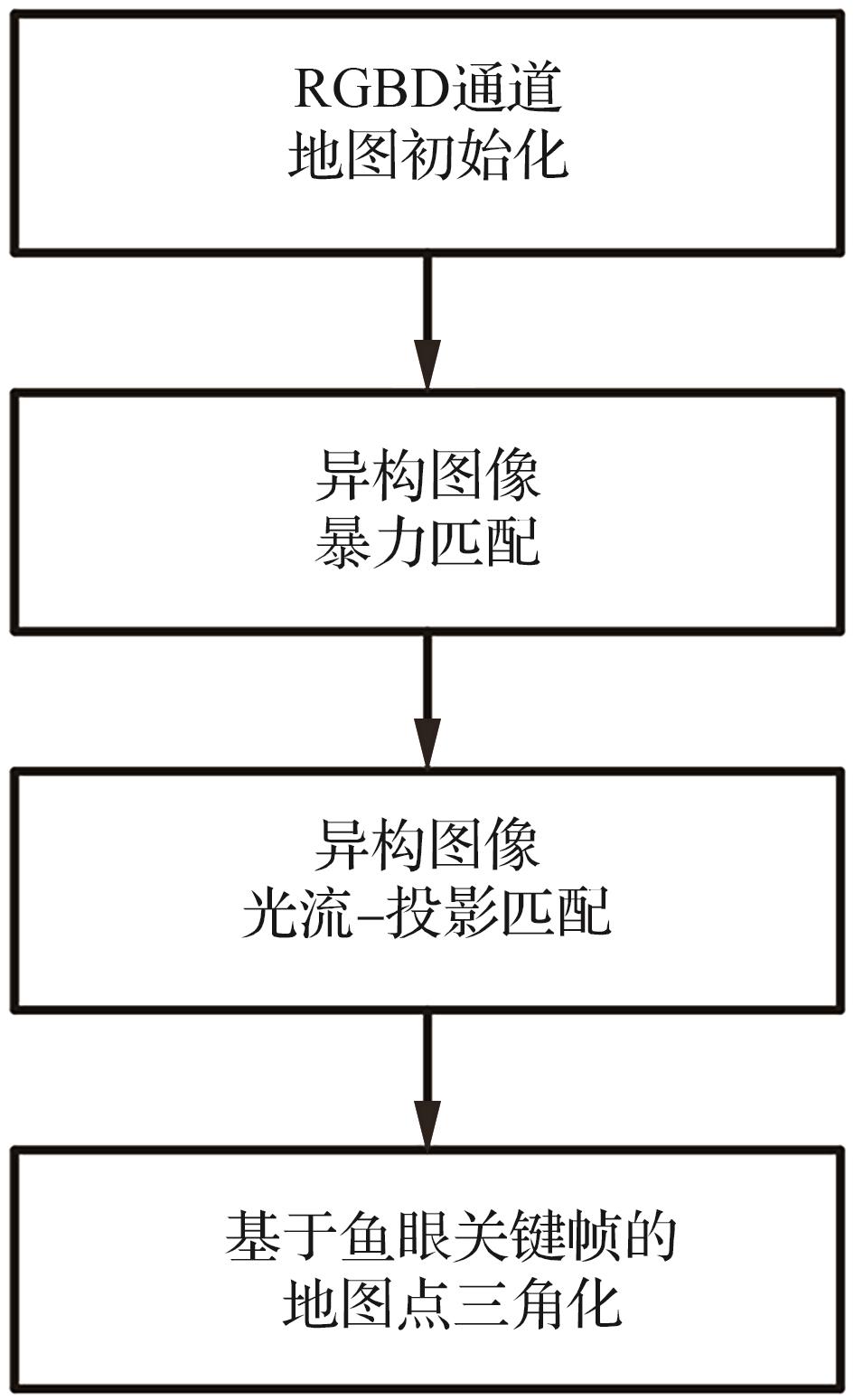

图18
本文匹配算法的异构匹配结果示例图
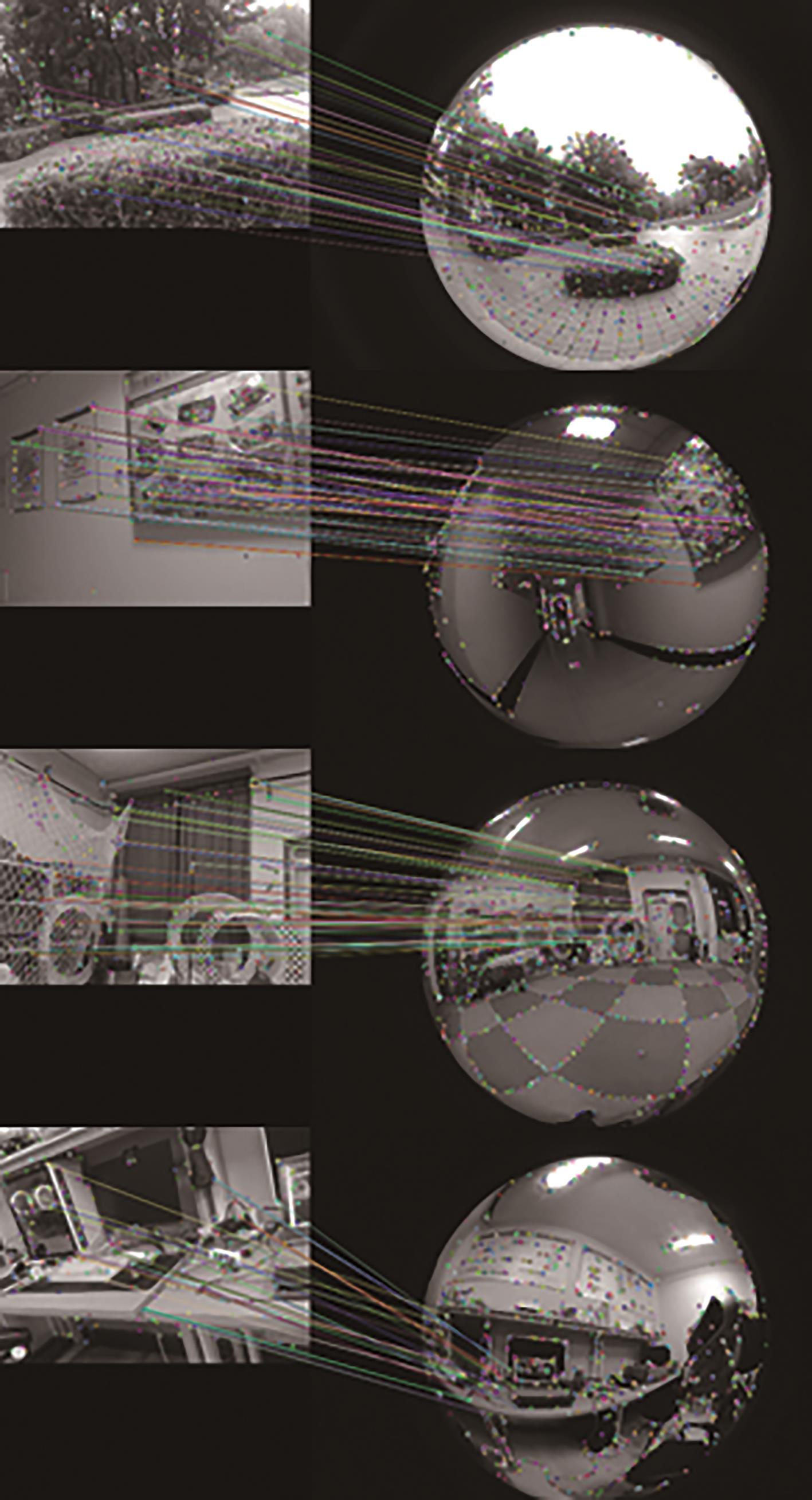
表1
算法在不同数据集中的匹配成功次数和成功率
| 数据集 | 匹配 次数 | 本文算法 | 暴力匹配 | BoW | FLANN | ||||
|---|---|---|---|---|---|---|---|---|---|
匹配 成功次数 | 匹配 成功率/% | 匹配 成功次数 | 匹配 成功率/% | 匹配 成功次数 | 匹配 成功率/% | 匹配 成功次数 | 匹配 成功率/% | ||
| 1-花园 | 1 309 | 1 252 | 95.6 | 590 | 45.1 | 0 | 0 | 147 | 11.2 |
| 2-走廊 | 1 535 | 1 529 | 99.6 | 1 122 | 73.1 | 574 | 37.4 | 401 | 26.1 |
| 3-实验室1 | 1 815 | 1 767 | 97.4 | 1 219 | 67.2 | 75 | 4.1 | 420 | 23.1 |
| 4-办公室1 | 1 609 | 1 483 | 92.2 | 753 | 46.8 | 58 | 3.6 | 352 | 21.9 |
| 5-实验室2 | 6 435 | 6 211 | 96.5 | 3 813 | 59.3 | 146 | 2.3 | 1 200 | 18.6 |
| 6-办公室2 | 1 831 | 1 771 | 96.7 | 1 010 | 55.2 | 184 | 10.0 | 559 | 30.5 |
图19
算法在不同数据集中的匹配成功率柱状图
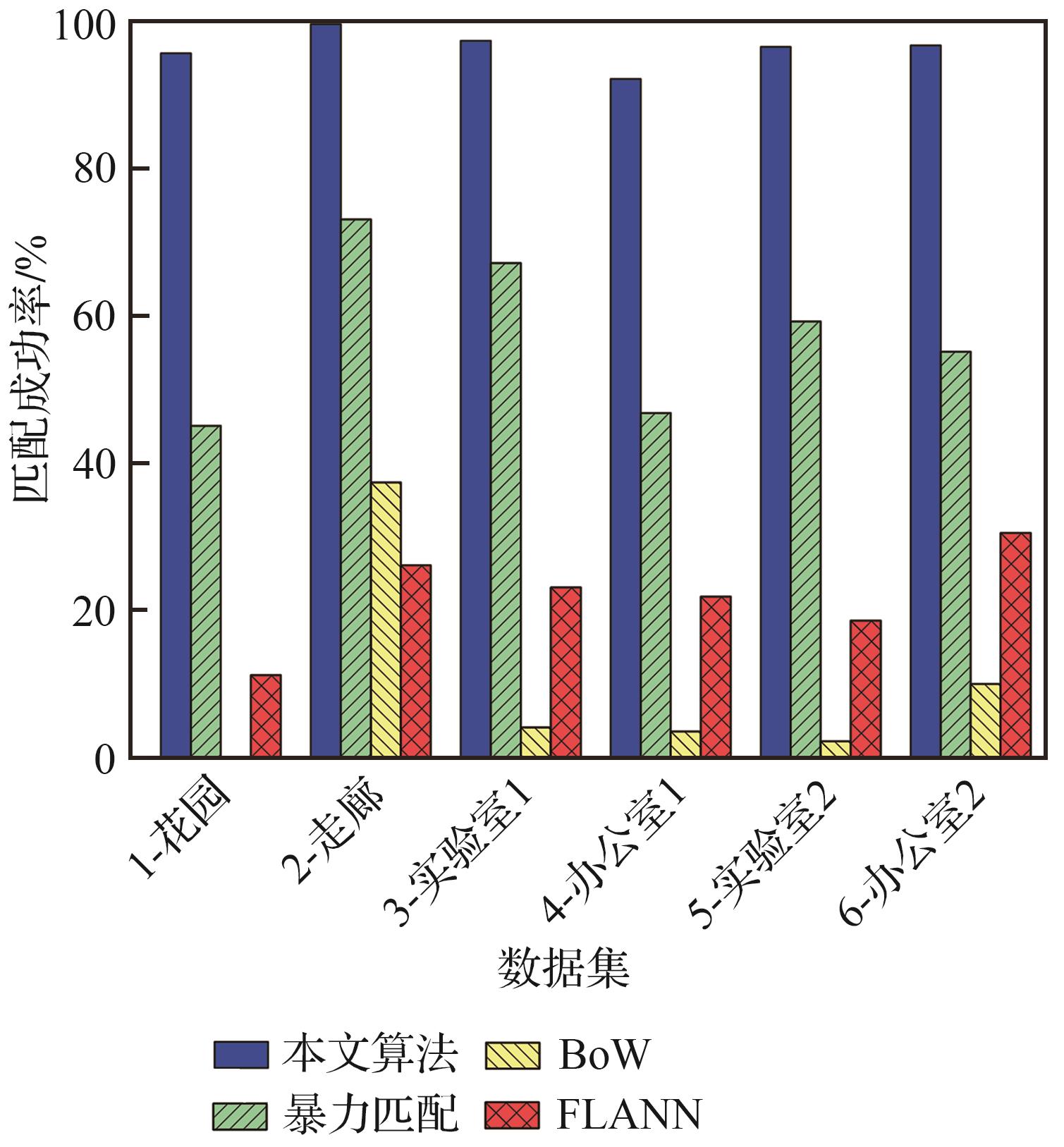
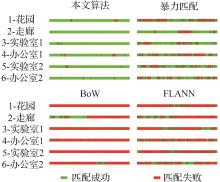
图20
算法在不同数据集中的成功匹配与失败匹配的条形分布图
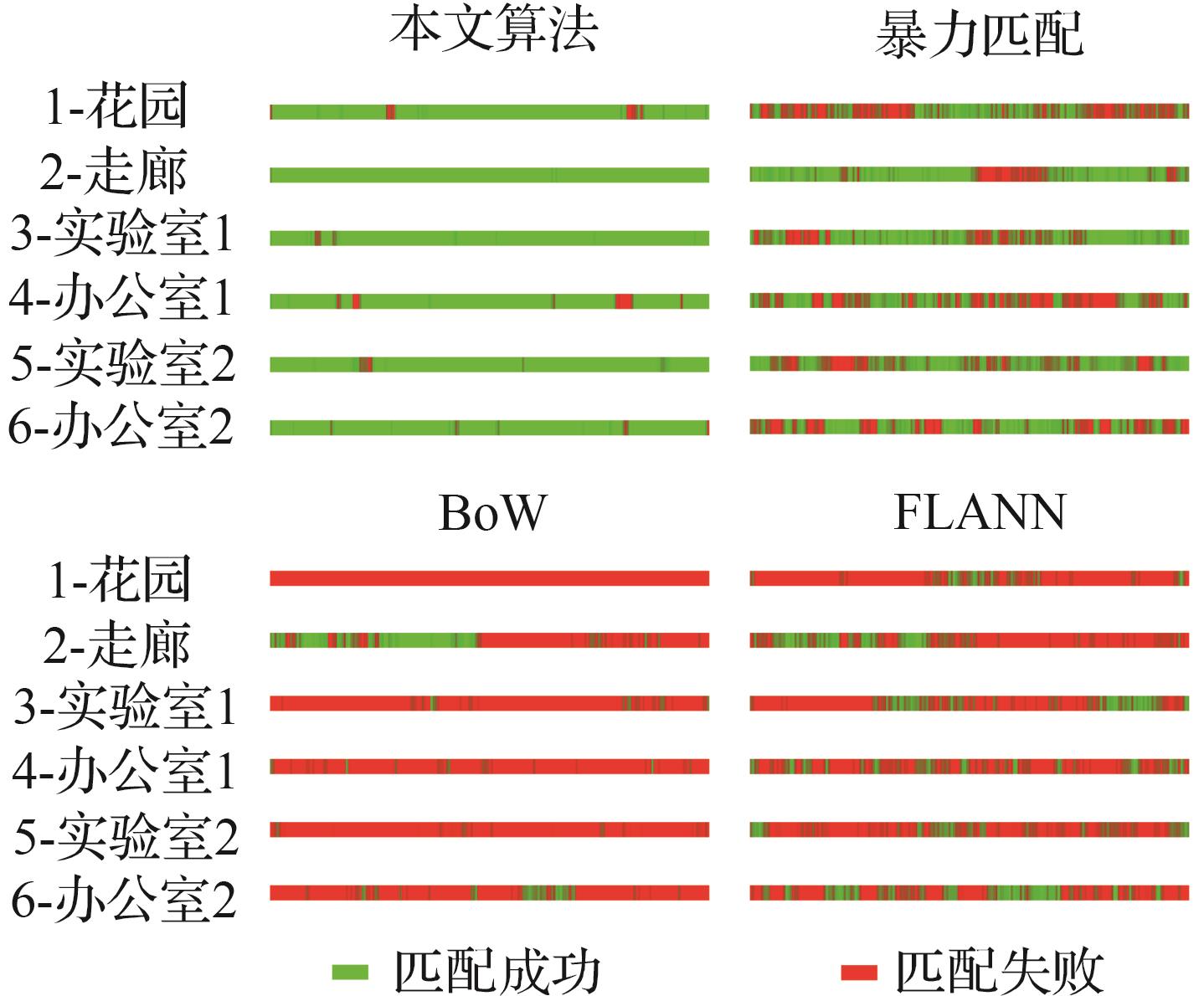
表2
算法的平均每帧匹配用时
| 算法 | 本文算法 | 暴力匹配 | BoW | FLANN |
|---|---|---|---|---|
| 耗时/ms | 53.539 | 11.734 | 0.124 | 19.122 |

图21
室内不同拍摄条件下的数据集示例图片
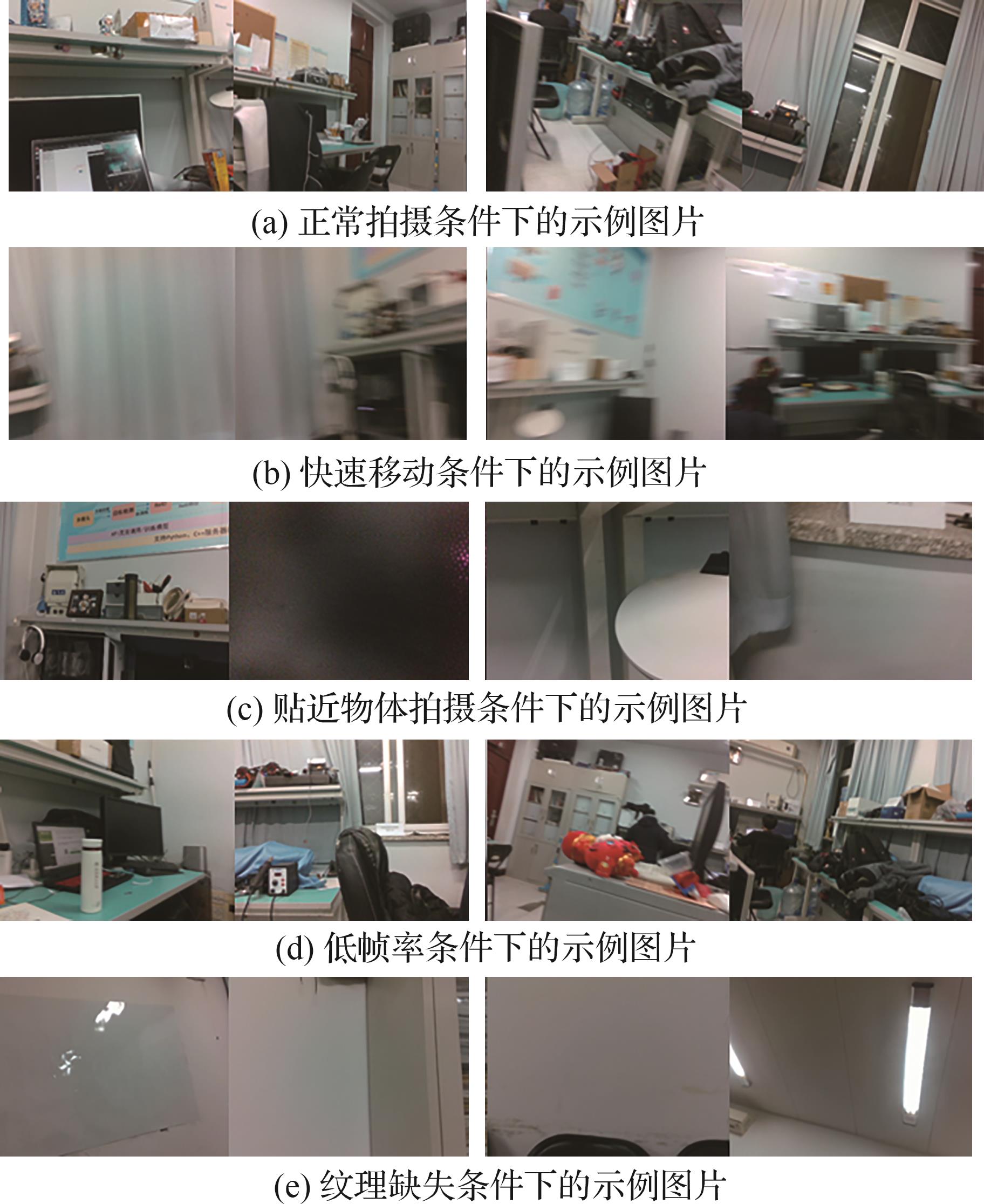
图22
定位成功帧和定位失败帧在数据集中的条形分布图
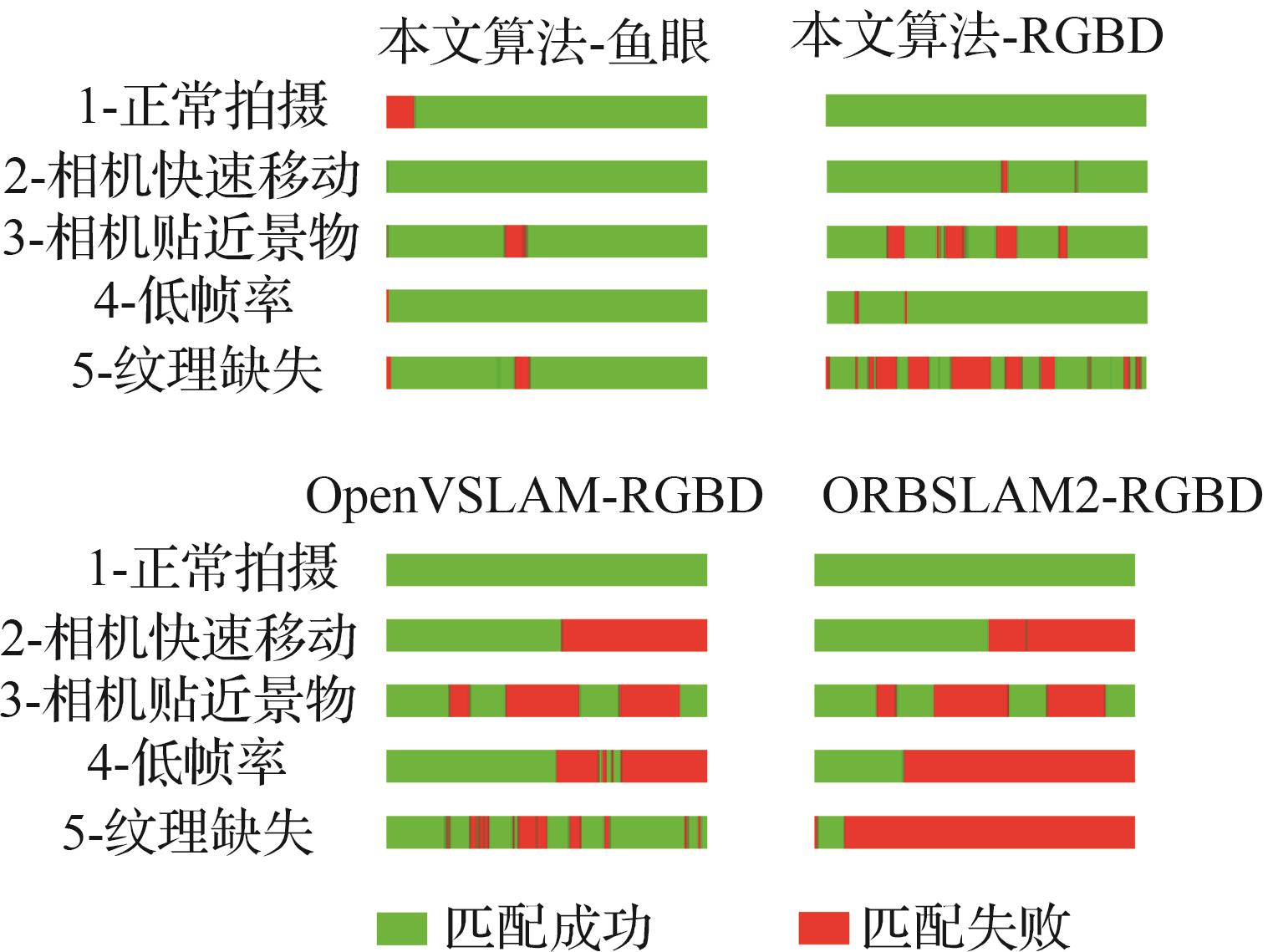

图23
不同拍摄条件下RGBD-SLAM通道构建的场景点云地图
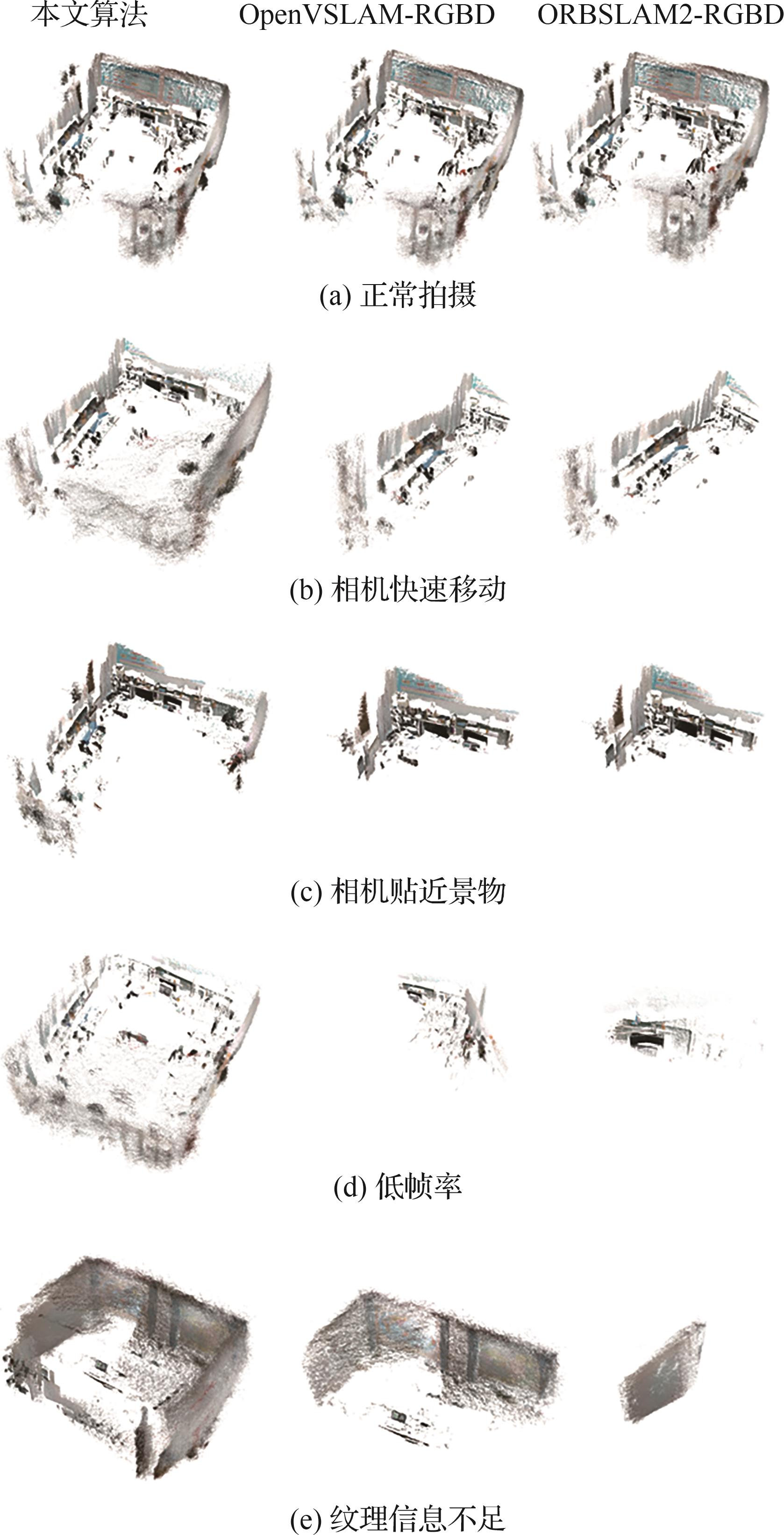
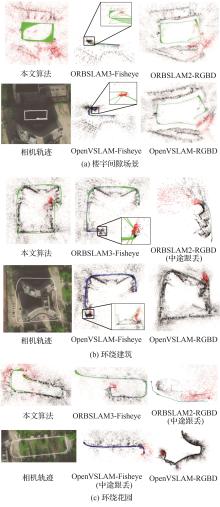
图24
室外条件下SLAM算法的相机轨迹和构建的场景点云地图
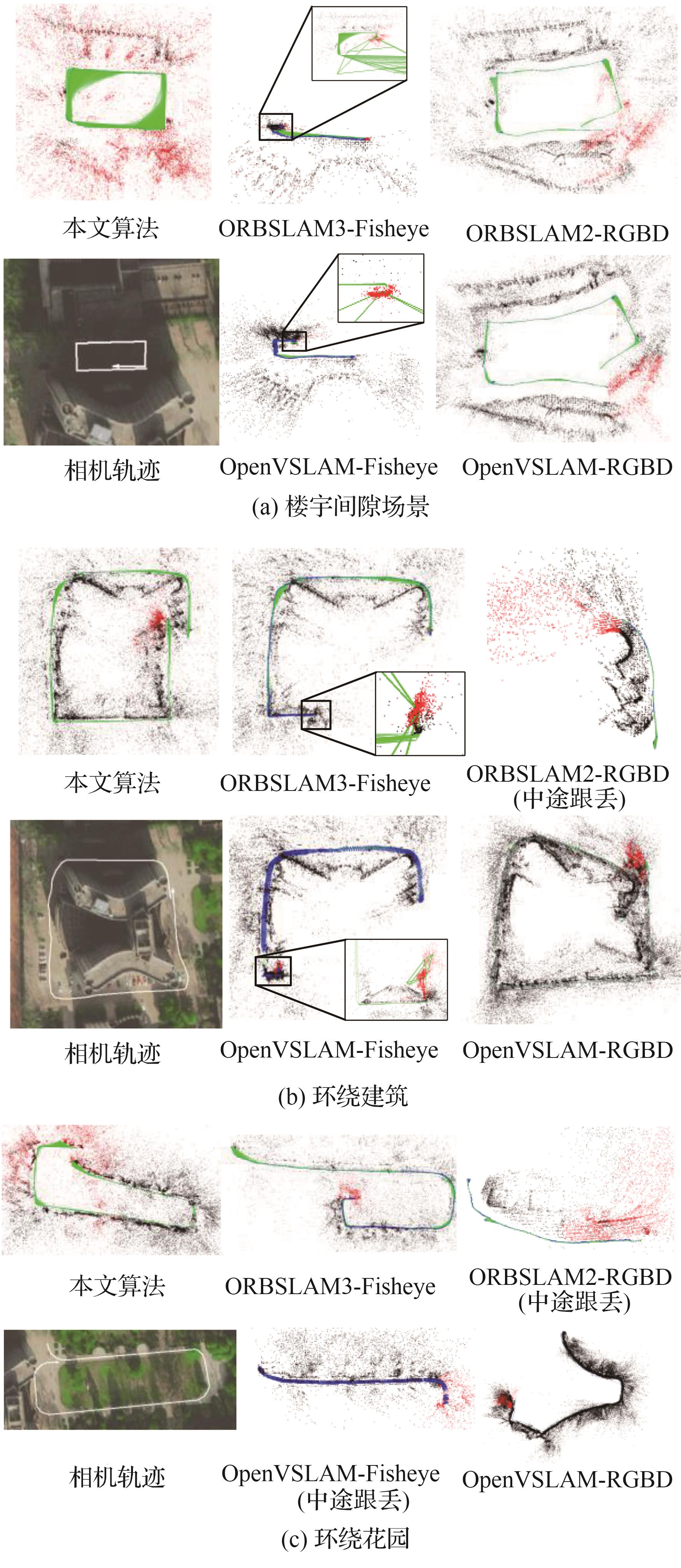

图25
轨迹误差柱状图
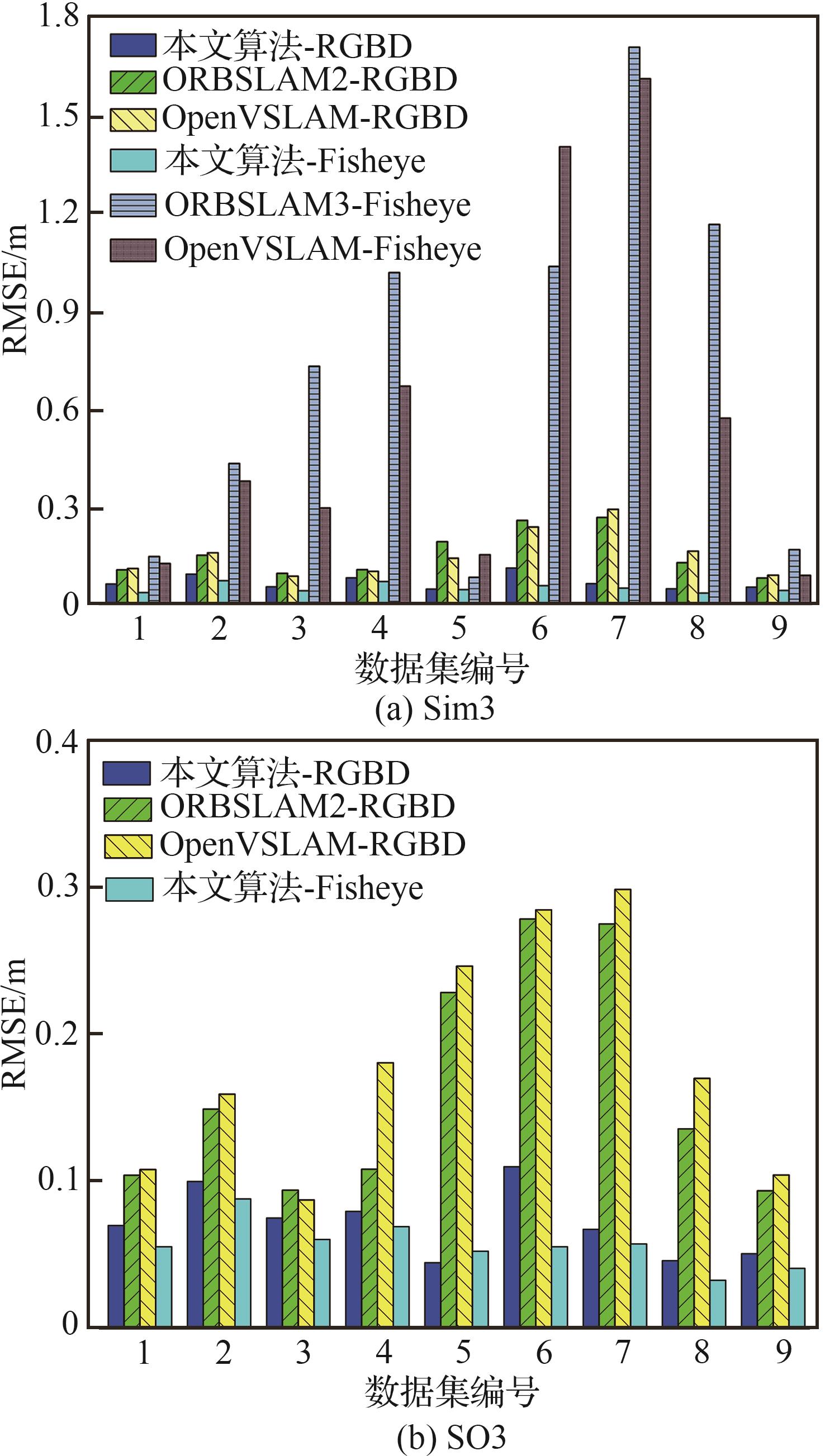
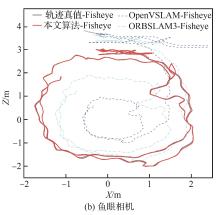
图26
8号数据集中的相机轨迹
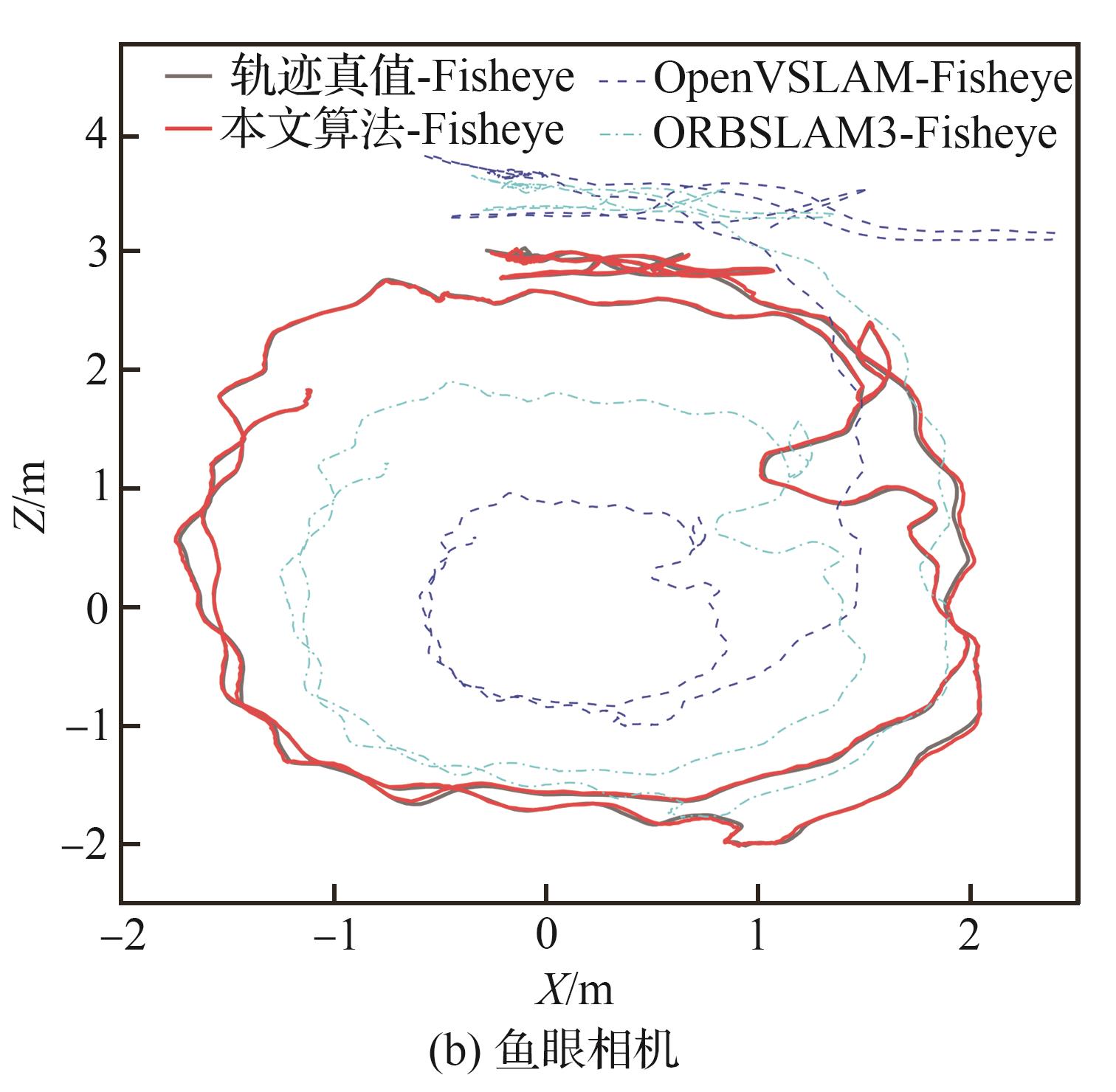
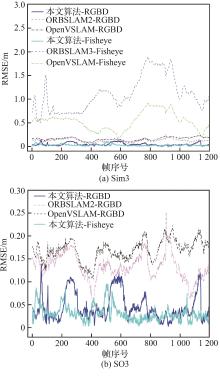
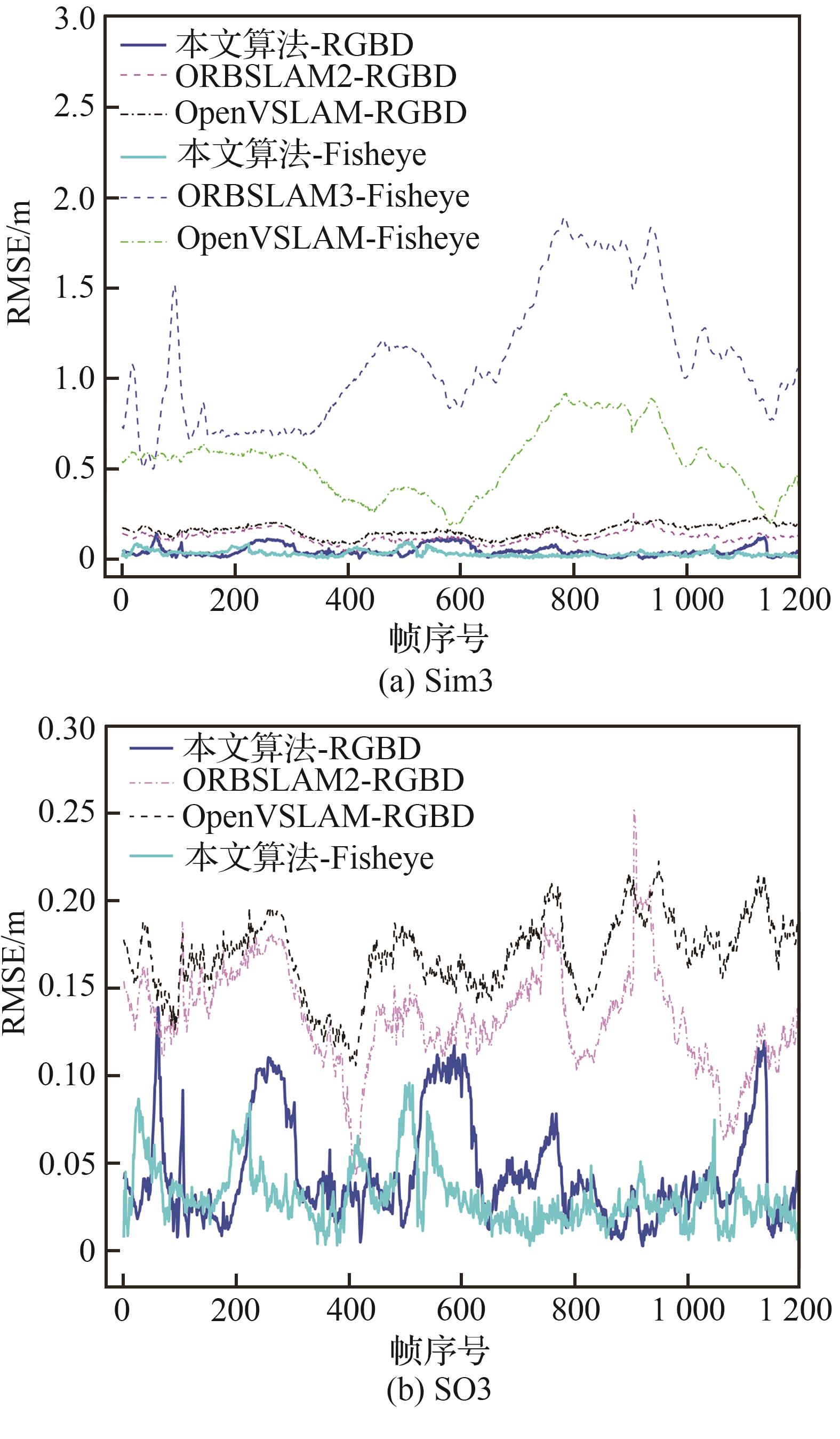
图27
SLAM算法在8号数据集中的轨迹误差曲线图
| 1 | 赵良玉, 金瑞, 朱叶青, 等. 基于点线特征融合的双目惯性SLAM算法[J]. 航空学报, 2022, 43(3): 325117. |
| ZHAO L Y, JIN R, ZHU Y Q, et al. Stereo visual-inertial slam with point and line features[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(3): 325117 (in Chinese). | |
| 2 | 谢洪乐, 陈卫东, 范亚娴, 等. 月面特征稀疏环境下的视觉惯性SLAM方法[J]. 航空学报, 2021, 42(1): 524169. |
| XIE H L, CHEN W D, FAN Y X, et al. Visual-inertial SLAM in featureless environments on lunar surface[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 524169 (in Chinese). | |
| 3 | 王小涛, 张家友, 王邢波, 等. 基于FastSLAM的绳系机器人同时定位与地图构建算法[J]. 航空学报, 2021, 42(1): 523893. |
| WANG X T, ZHANG J Y, WANG X B, et al. Simultaneous localization and mapping algorithm based on FastSLAM framework for tethered robots[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523893 (in Chinese). | |
| 4 | DAVISON A J, REID I D, MOLTON N D, et al. MonoSLAM: Real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. |
| 5 | KLEIN G, MURRAY D. Parallel tracking and mapping for small AR workspaces[C]∥ 2007 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway: IEEE Press, 2008: 225-234. |
| 6 | KLEIN G, MURRAY D. Improving the agility of keyframe-based SLAM[C]∥European Conference on Computer Vision. Berlin: Springer, 2008: 802-815. |
| 7 | MUR-ARTAL R, MONTIEL J M M, TARDÓS J D. ORB-SLAM: A versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 8 | LIN Y, GAO F, QIN T, et al. Autonomous aerial navigation using monocular visual-inertial fusion[J]. Journal of Field Robotics, 2018, 35(1): 23-51. |
| 9 | WANG Y H, CAI S J, LI S J, et al. CubemapSLAM: A piecewise-pinhole monocular fisheye SLAM system[C]∥Asian Conference on Computer Vision. Cham: Springer, 2019: 34-49. |
| 10 | CARUSO D, ENGEL J, CREMERS D. Large-scale direct SLAM for omnidirectional cameras[C]∥2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2015: 141-148. |
| 11 | ENGEL J, SCHÖPS T, CREMERS D. LSD-SLAM: Large-scale direct monocular SLAM[C]∥European Conference on Computer Vision. Cham: Springer, 2014: 834-849. |
| 12 | ZHANG Z C, REBECQ H, FORSTER C, et al. Benefit of large field-of-view cameras for visual odometry[C]∥ 2016 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2016: 801-808. |
| 13 | FORSTER C, PIZZOLI M, SCARAMUZZA D. SVO: Fast semi-direct monocular visual odometry[C]∥2014 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2014: 15-22. |
| 14 | MATSUKI H, VON STUMBERG L, USENKO V, et al. Omnidirectional DSO: Direct sparse odometry with fisheye cameras[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 3693-3700. |
| 15 | ENGEL J, KOLTUN V, CREMERS D. Direct sparse odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625. |
| 16 | JO Y G, HONG S H, HWANG S S, et al. Fisheye lens camera based autonomous valet parking system[DB/OL]. arXiv preprint: 2104.13119, 2021. |
| 17 | LIU S Y, GUO P, FENG L H, et al. Accurate and robust monocular SLAM with omnidirectional cameras[J]. Sensors (Basel, Switzerland), 2019, 19(20): 4494. |
| 18 | KHOMUTENKO B, GARCIA G, MARTINET P. An enhanced unified camera model[J]. IEEE Robotics and Automation Letters, 2016, 1(1): 137-144. |
| 19 | CORREIA GARCIA T A, CAMPOS M B, CASTANHEIRO L F, et al. A proposal to integrate ORB-slam fisheye and convolutional neural networks for outdoor terrestrial mobile mapping[C]∥ 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS. Piscataway: IEEE Press, 2021: 578-581. |
| 20 | URBAN S, HINZ S. MultiCol-SLAM - A modular real-time multi-camera SLAM system[DB/OL]. arXiv preprint: 1610.07336, 2016. |
| 21 | JI S P, QIN Z J, SHAN J. Panoramic SLAM from a multiple fisheye camera rig[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 159: 169-183. |
| 22 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 23 | ZHANG Y, HUANG F. Panoramic visual SLAM technology for spherical images[J]. Sensors (Basel, Switzerland), 2021, 21(3): 705. |
| 24 | ZHAO Q, FENG W, WAN L, et al. SPHORB: A fast and robust binary feature on the sphere[J]. International Journal of Computer Vision, 2015, 113(2): 143-159. |
| 25 | AUDRAS C, COMPORT A I, MEILLAND M, et al. Real-time dense appearance-based SLAM for RGB-D sensors[C]∥Proceedings of the 2011 Australasian Conference on Robotics and Automation, 2011. |
| 26 | NEWCOMBE R A, IZADI S, HILLIGES O, et al. KinectFusion: Real-time dense surface mapping and tracking[C]∥ 2011 10th IEEE International Symposium on Mixed and Augmented Reality. Piscataway: IEEE Press, 2012: 127-136. |
| 27 | WHELAN T, JOHANNSSON H, KAESS M, et al. Robust real-time visual odometry for dense RGB-D mapping[C]∥ 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2013: 5724-5731. |
| 28 | CHEN J W, BAUTEMBACH D, IZADI S. Scalable real-time volumetric surface reconstruction[J]. ACM Transactions on Graphics, 2013, 32(4): 1-16. |
| 29 | ENDRES F, HESS J, STURM J, et al. 3-D mapping with an RGB-D camera[J]. IEEE Transactions on Robotics, 2014, 30(1): 177-187. |
| 30 | HENRY P, KRAININ M, HERBST E, et al. RGB-D mapping: Using depth cameras for dense 3D modeling of indoor environments[M]∥Experimental Robotics. Berlin: Springer, 2014: 477-491. |
| 31 | BESL P J, MCKAY N D. Method for registration of 3-D shapes [J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1992, 14(2):239-256. |
| 32 | LOWE D G. Object recognition from local scale-invariant features[C]∥Proceedings of the Seventh IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2002: 1150-1157. |
| 33 | SUMIKURA S, SHIBUYA M, SAKURADA K. OpenVSLAM: A versatile visual SLAM framework[C]∥Proceedings of the 27th ACM International Conference on Multimedia. New York: ACM, 2019: 2292-2295. |
| 34 | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: An accurate open-source library for visual, visual⁃inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 35 | YOUSIF K, TAGUCHI Y, RAMALINGAM S. MonoRGBD-SLAM: Simultaneous localization and mapping using both monocular and RGBD cameras[C]∥ 2017 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2017: 4495-4502. |
| 36 | ZHANG Y T, SONG J M, DING Y, et al. FSD-BRIEF: A distorted BRIEF descriptor for fisheye image based on spherical perspective model[J]. Sensors (Basel, Switzerland), 2021, 21(5): 1839. |
| 37 | ROSTEN E, DRUMMOND T. Machine learning for high-speed corner detection[M]∥Computer Vision⁃ECCV 2006. Berlin: Springer, 2006: 430-443. |
| 38 | MIKOLAJCZYK K, SCHMID C. A performance evaluation of local descriptors[C]∥ 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Proceedings. Piscataway: IEEE Press, 2003: 1-7. |
| 39 | URBAN S, LEITLOFF J, HINZ S. MLPnP - A real-time maximum likelihood solution to the perspective-n-point problem[DB/OL].arXiv preprint: 1607.08112, 2016. |
| [1] | 王秋富 石治国 张倬 孙晓亮 于起峰. 舰载机着舰引导中鲁棒单目视觉相对位姿测量[J]. 航空学报, 0, (): 0-0. |
| [2] | 张薇, 何若俊. 面向物联网数据收集的无人机自主路径规划[J]. 航空学报, 2024, 45(8): 329054-329054-1. |
| [3] | 李家祥, 程建华, 李亮, 那志博, 贾春. GBAS对流层异常完好性监测参数研究[J]. 航空学报, 2024, 45(7): 328817-328817. |
| [4] | 倪育德, 闫苗玉, 刘瑞华. 基于DOA-BP神经网络的电离层TEC短期预测[J]. 航空学报, 2024, 45(4): 328707-328707. |
| [5] | 杨博, 于贺, 樊子辰. 微观能量分析气动光学效应时变误差的方法[J]. 航空学报, 2024, 45(4): 128703-128703. |
| [6] | 李瑞杰, 李亮, 蒋家昌, 程力, 王柳淇. 基于多星最差故障搜索的RAIM完好性风险估计方法[J]. 航空学报, 2024, 45(2): 328684-328684. |
| [7] | 崔凯鑫, 段广仁. 基于干扰观测器的一类组合航天器高阶全驱抗干扰控制[J]. 航空学报, 2024, 45(1): 628892-628892. |
| [8] | 吴紫怡, 何绍溟, 王亚东, 李虹言. 针对运动目标的可观性增强非线性最优制导律[J]. 航空学报, 2023, 44(S2): 729750-729750. |
| [9] | 李坤 布树辉 贾旋 董逸飞 陈霖. 基于惯性导航与数据链的飞机间相对定位方法[J]. 航空学报, 0, (): 0-0. |
| [10] | 熊骏, 解相朋, 熊智, 庄园, 郑宇. 基于图模型的无人集群同步自定位与相对定位[J]. 航空学报, 2023, 44(S2): 729708-729708. |
| [11] | 周泽波, 张泽亮, 彭鑫, 李滚, 陶洋, 王亮权, 罗鑫. 基于记忆融合模式的多无人机分散式协同导航方法[J]. 航空学报, 2023, 44(20): 628440-628440. |
| [12] | 朱祥维, 沈丹, 肖凯, 马岳鑫, 廖祥, 古富强, 余芳文, 高柯夫, 刘经南. 类脑导航的机理、算法、实现与展望[J]. 航空学报, 2023, 44(19): 28569-028569. |
| [13] | 唐帅文 曹友 张朋 姜江. 基于相关证据推理规则的激光惯组健康评估[J]. 航空学报, 0, (): 0-0. |
| [14] | 崔凯鑫 段广仁. 基于干扰观测器的一类组合航天器高阶全驱抗干扰控制(全驱系统专刊)[J]. 航空学报, 0, (): 0-0. |
| [15] | 岳敬轩, 王红茹, 朱东琴, ALEKSANDR Chupalov. 基于改进粒子滤波的无人机编队协同导航算法[J]. 航空学报, 2023, 44(14): 327995-327995. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 384
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 820
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学