Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (24): 331840.doi: 10.7527/S1000-6893.2025.31840
• Electronics and Electrical Engineering and Control • Previous Articles
Guocheng YAN1,2, Honglun WANG1,2( ), Yanxiang WANG1,2,3,4, Yuebin LUN1,2,3, Junfan ZHU1,2
), Yanxiang WANG1,2,3,4, Yuebin LUN1,2,3, Junfan ZHU1,2
Received:2025-01-23
Revised:2025-05-07
Accepted:2025-07-25
Online:2025-08-12
Published:2025-08-11
Contact:
Honglun WANG
E-mail:wang_hl_12@126.com
Supported by:CLC Number:
Guocheng YAN, Honglun WANG, Yanxiang WANG, Yuebin LUN, Junfan ZHU. Prescribed performance anti-swing control for wing rotation process of UAV towed aerial recovery[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 331840.
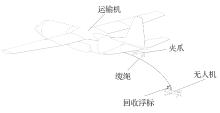
Fig.1
Schematic diagram of towed aerial recovery structure
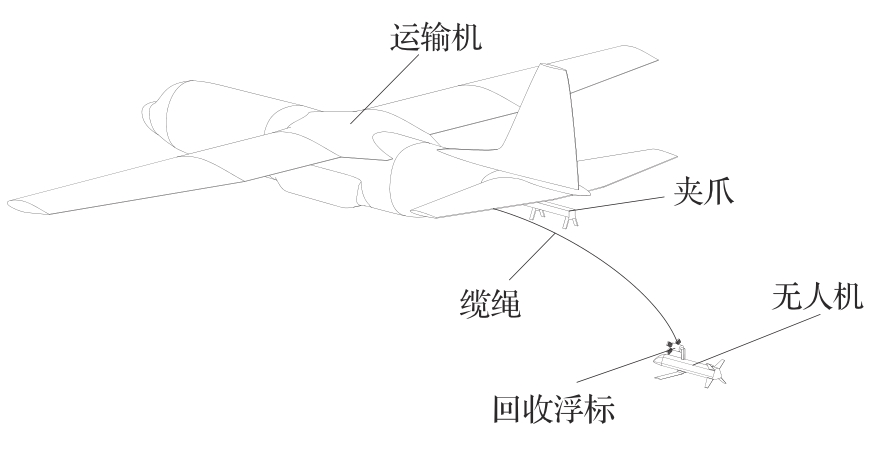
Fig.2
Wing rotation process of variable sweep configuration and rotary wing configuration
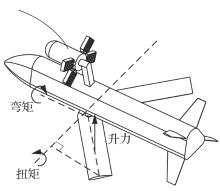
Fig.3
Forces during wing rotation process of variable sweep configuration
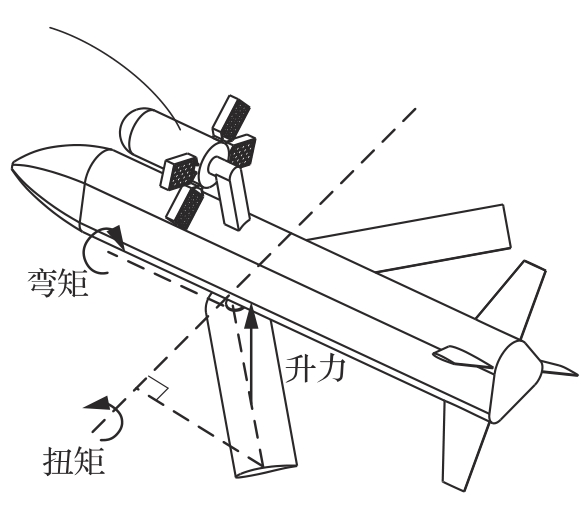
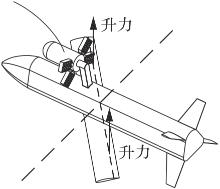
Fig.4
Forces during wing rotation process of rotary wing configuration
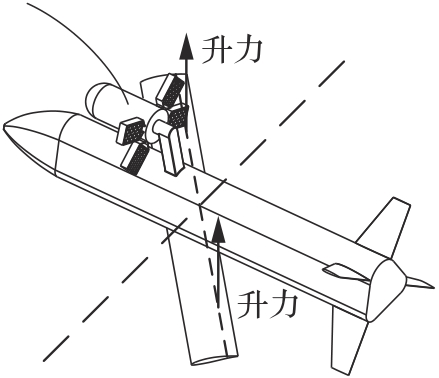
Fig.5
Cable-drogue-UAV assembly
Fig.6
Modelling of wing rotation process
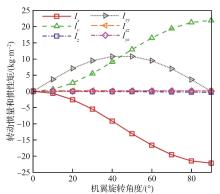
Fig.7
Variation of moment of inertia during wing rotation process
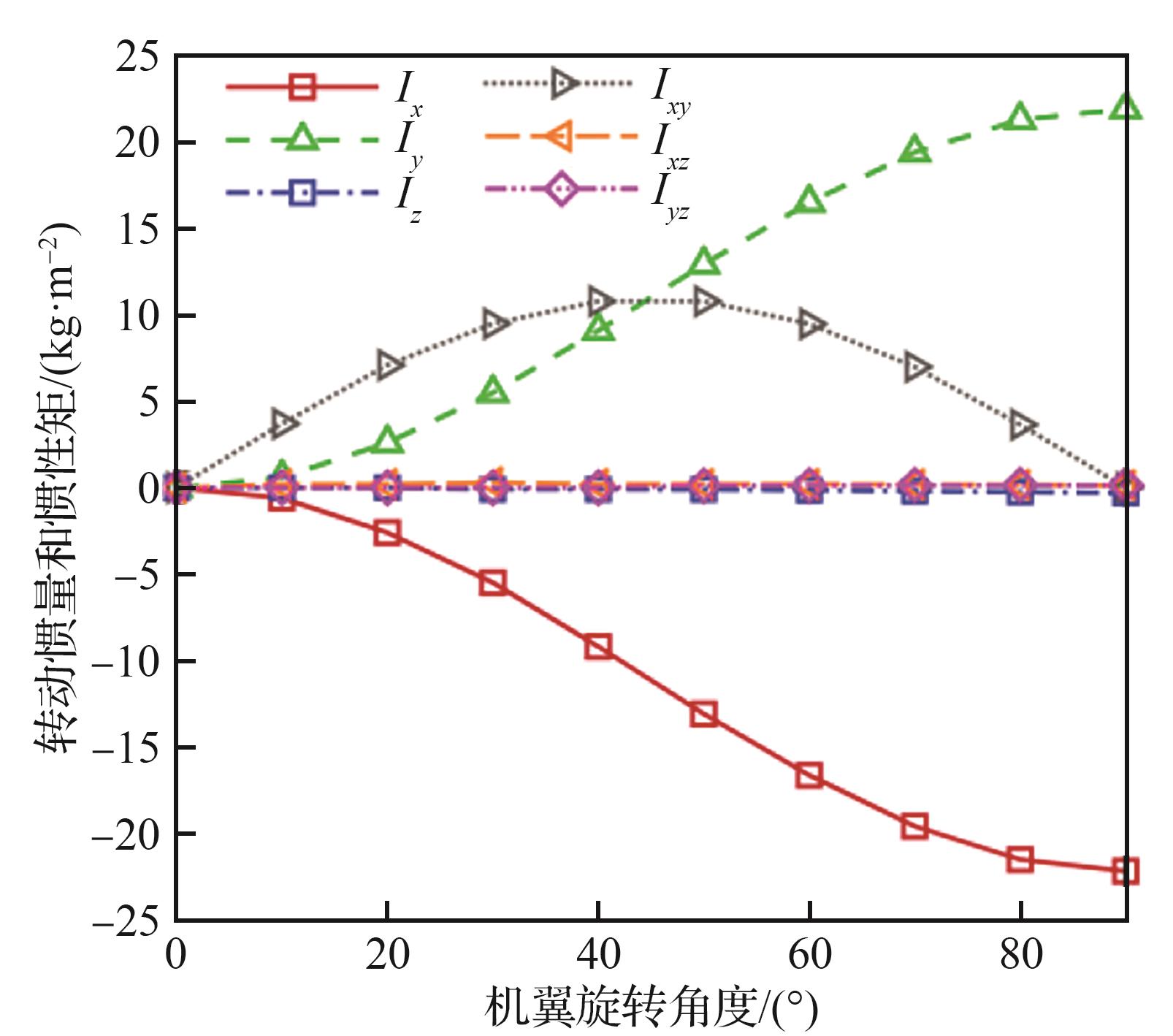
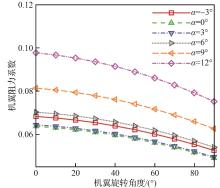
Fig.8
Variation of drag coefficient of wing
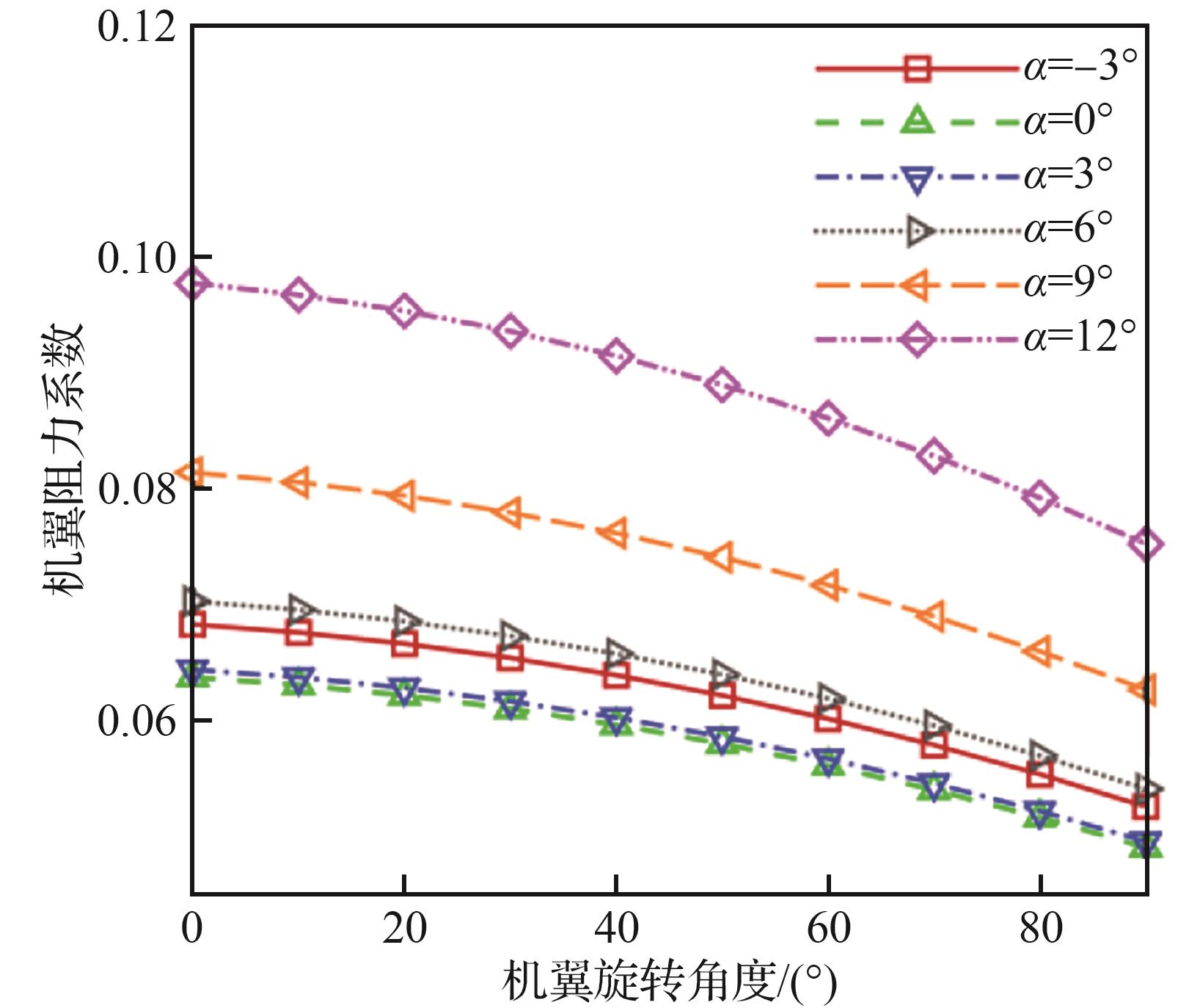
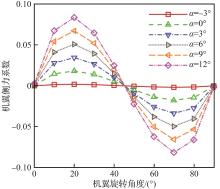
Fig.9
Variation of side force coefficient of wing
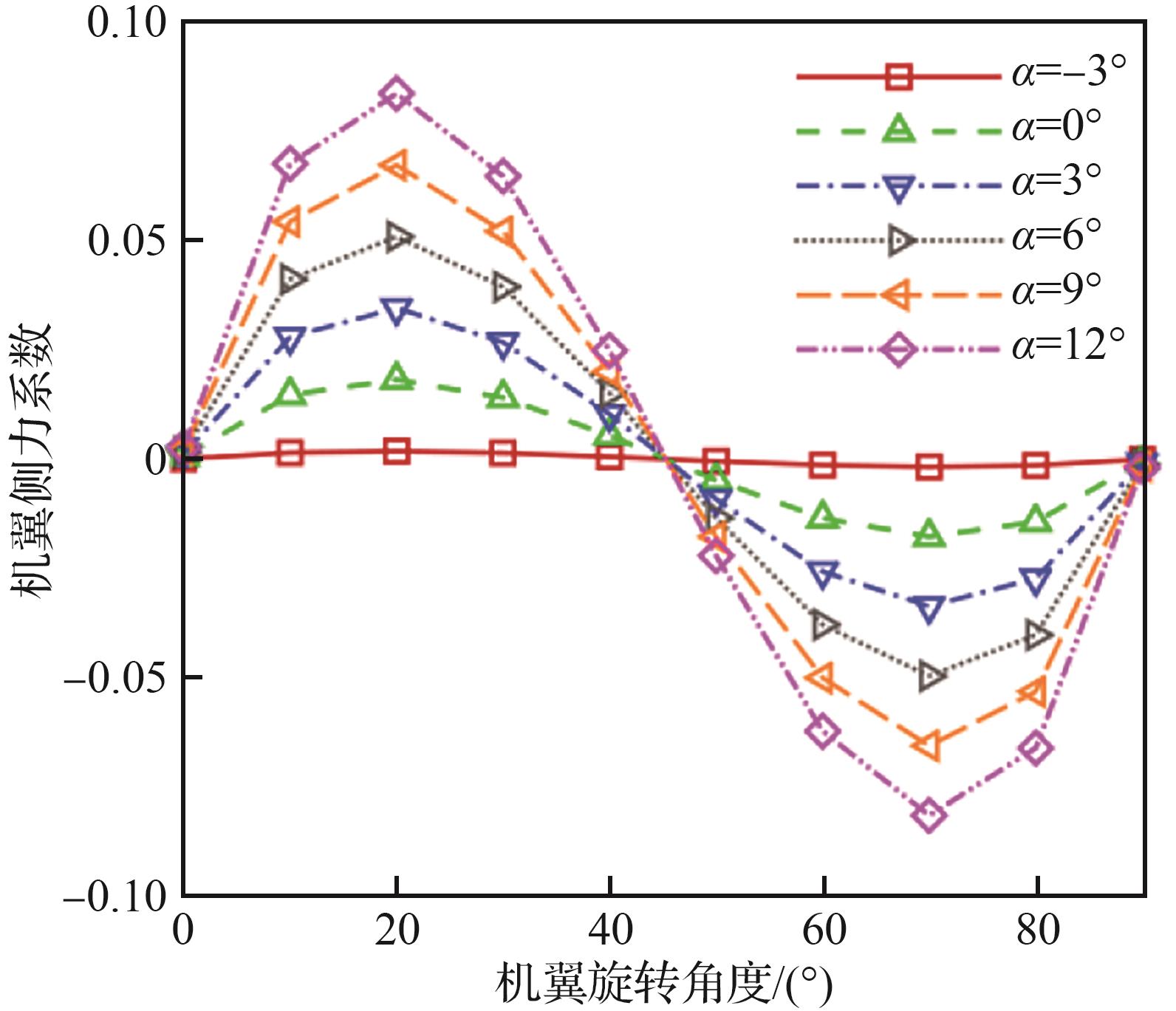
Fig.10
Variation of lift coefficient of wing
Fig.11
Variation of pitch moment coefficient of wing
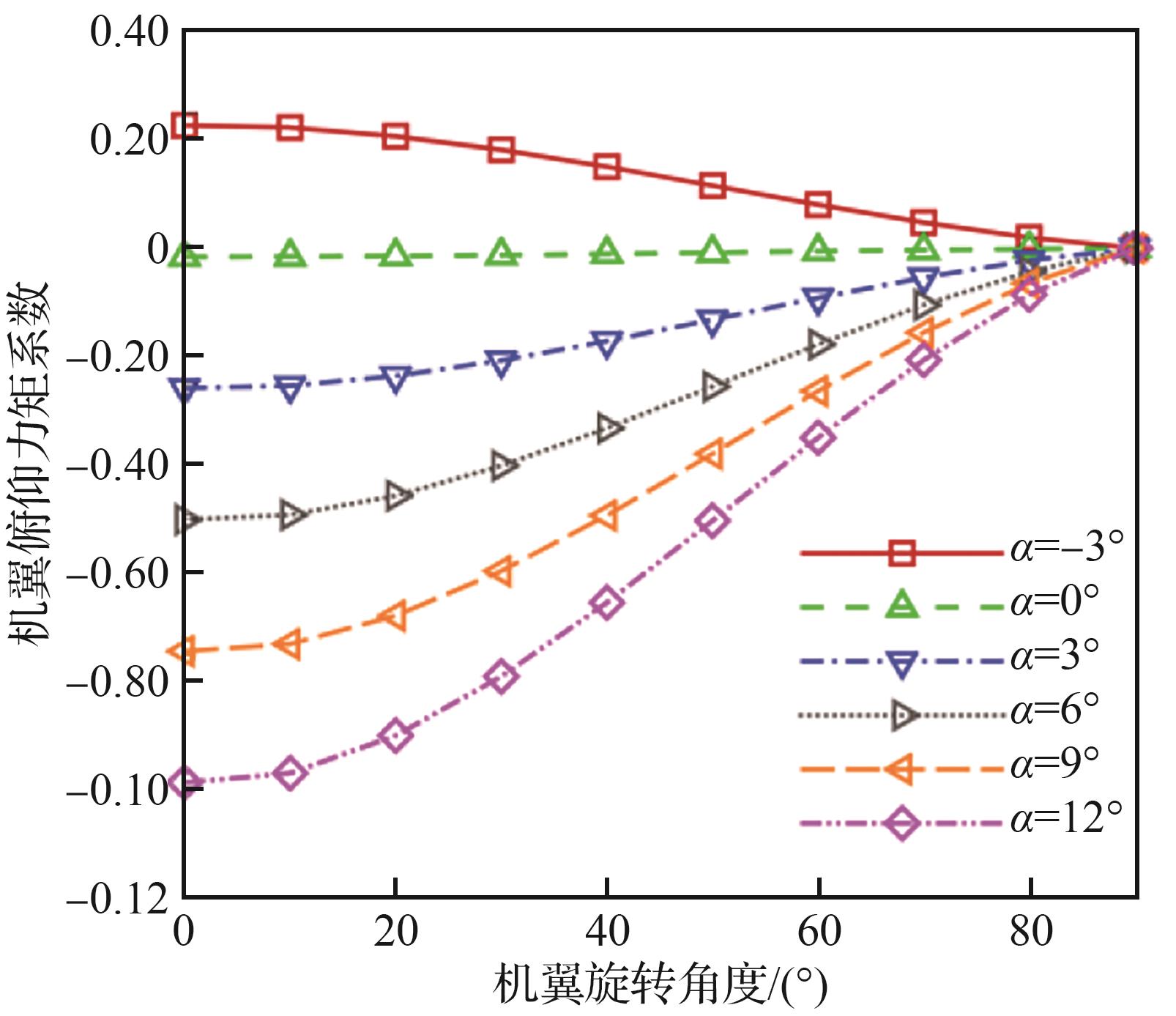
Fig.12
Variation of roll moment coefficient of wing
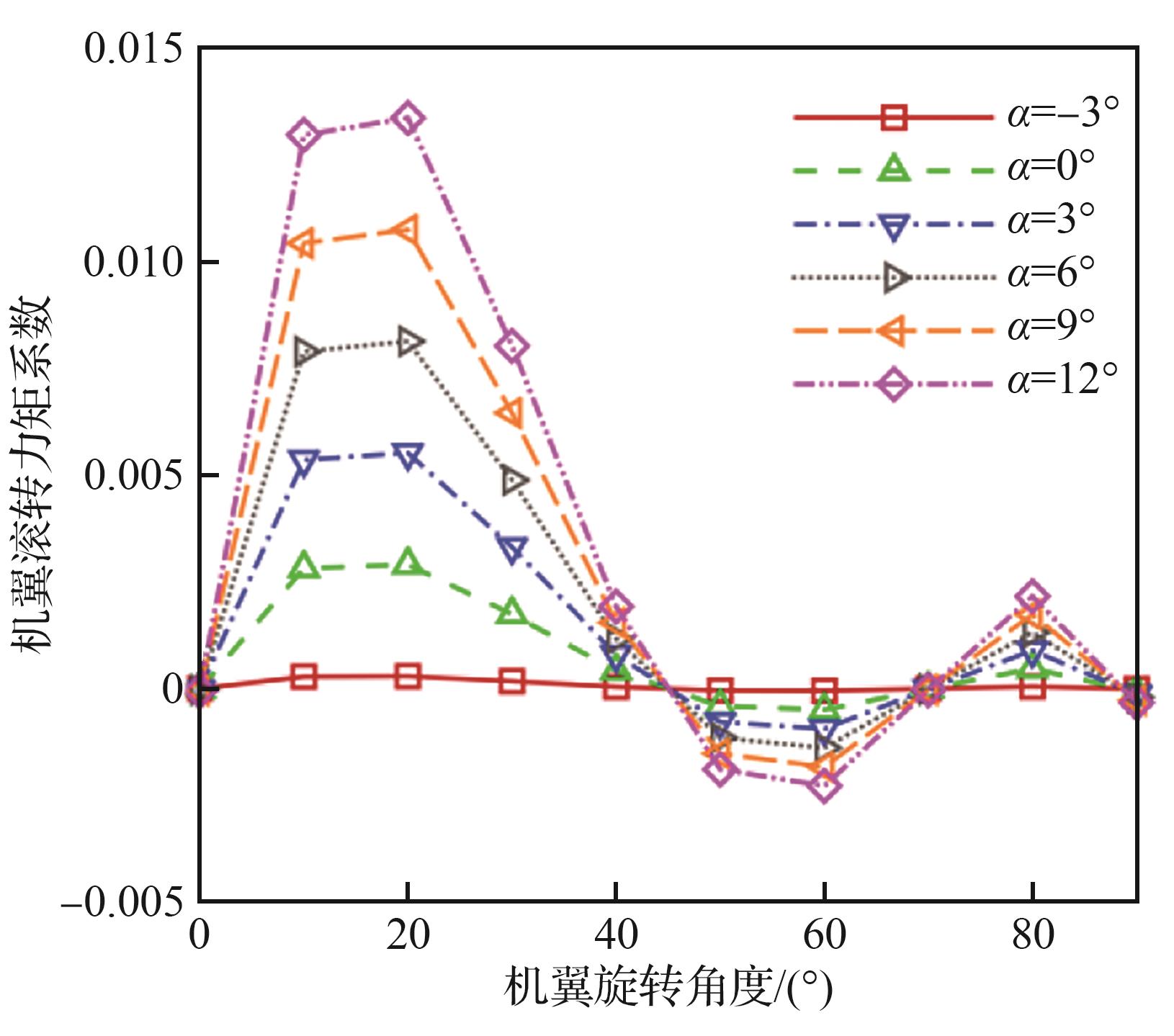
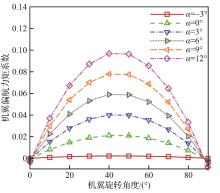
Fig.13
Variation of yaw moment coefficient of wing
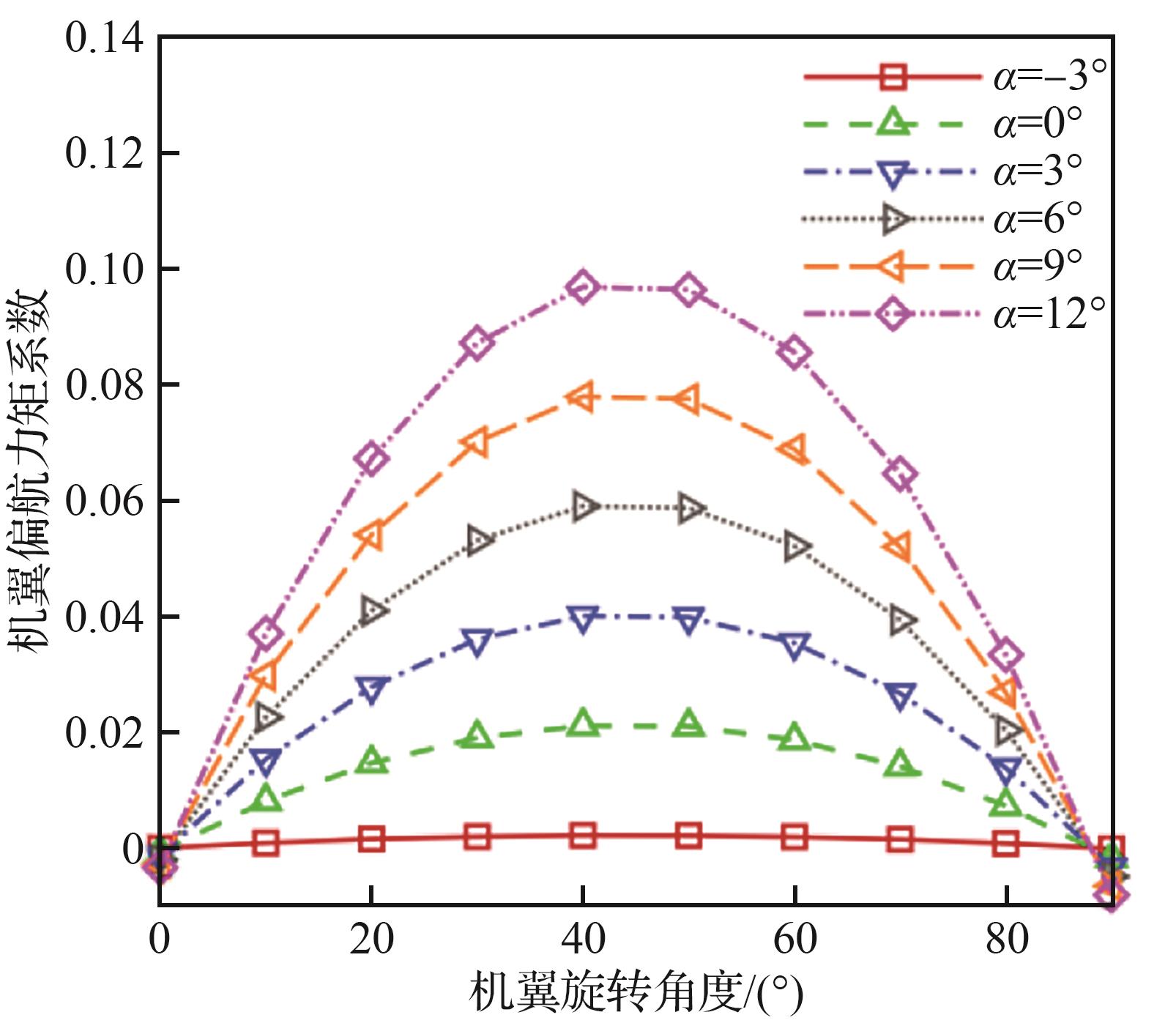

Fig.14
Block diagram of architecture of control system
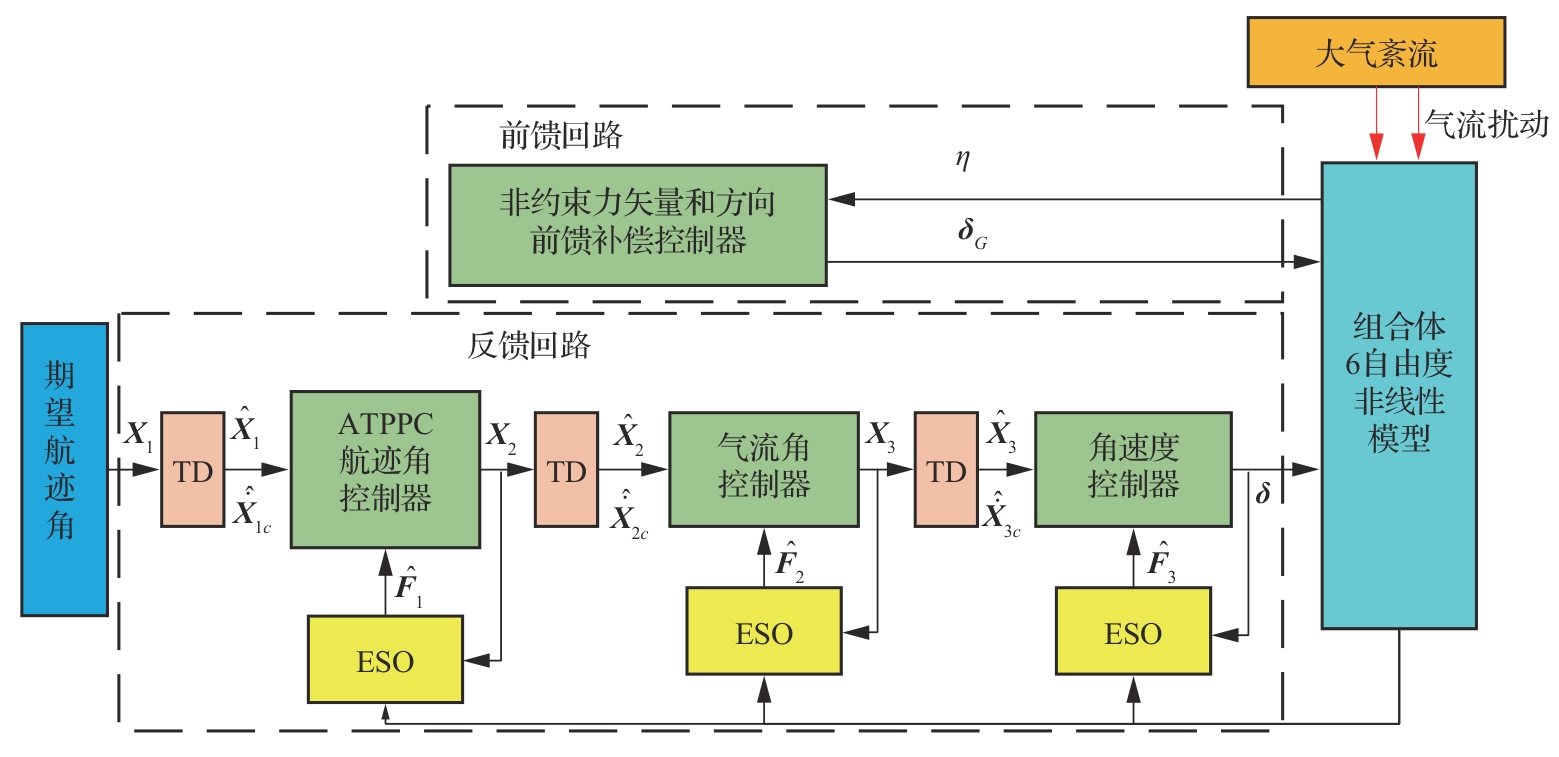
Fig.15
Variation of NCFVS during wing rotation process
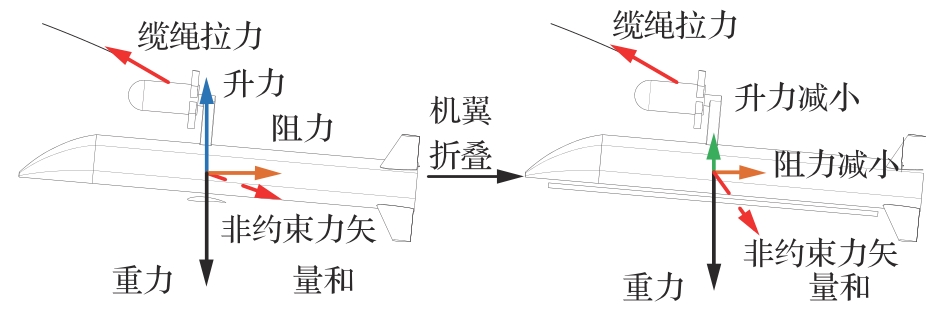
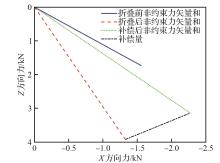
Fig.16
Compensation effect of grid fin on NCFVS
Table 1
Parameters of simulation
| 参数 | 数值 |
|---|---|
| 飞行高度 | 3 |
| 无人机质量 | 400 |
| 飞行速度 | 120 |
| 初始航向角 | 0 |
| 初始侧滑角 | 0 |
| 初始滚转角 | 0 |
| 缆绳长度 | 24 |
| 转动惯量 | 39.497 |
| 转动惯量 | 495.308 |
| 转动惯量 | 514.864 |
| 惯性矩 | 0 |
| 惯性矩 | 0 |
| 惯性矩 | 5.237 |
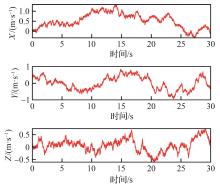
Fig.17
Turbulence during wing rotation process
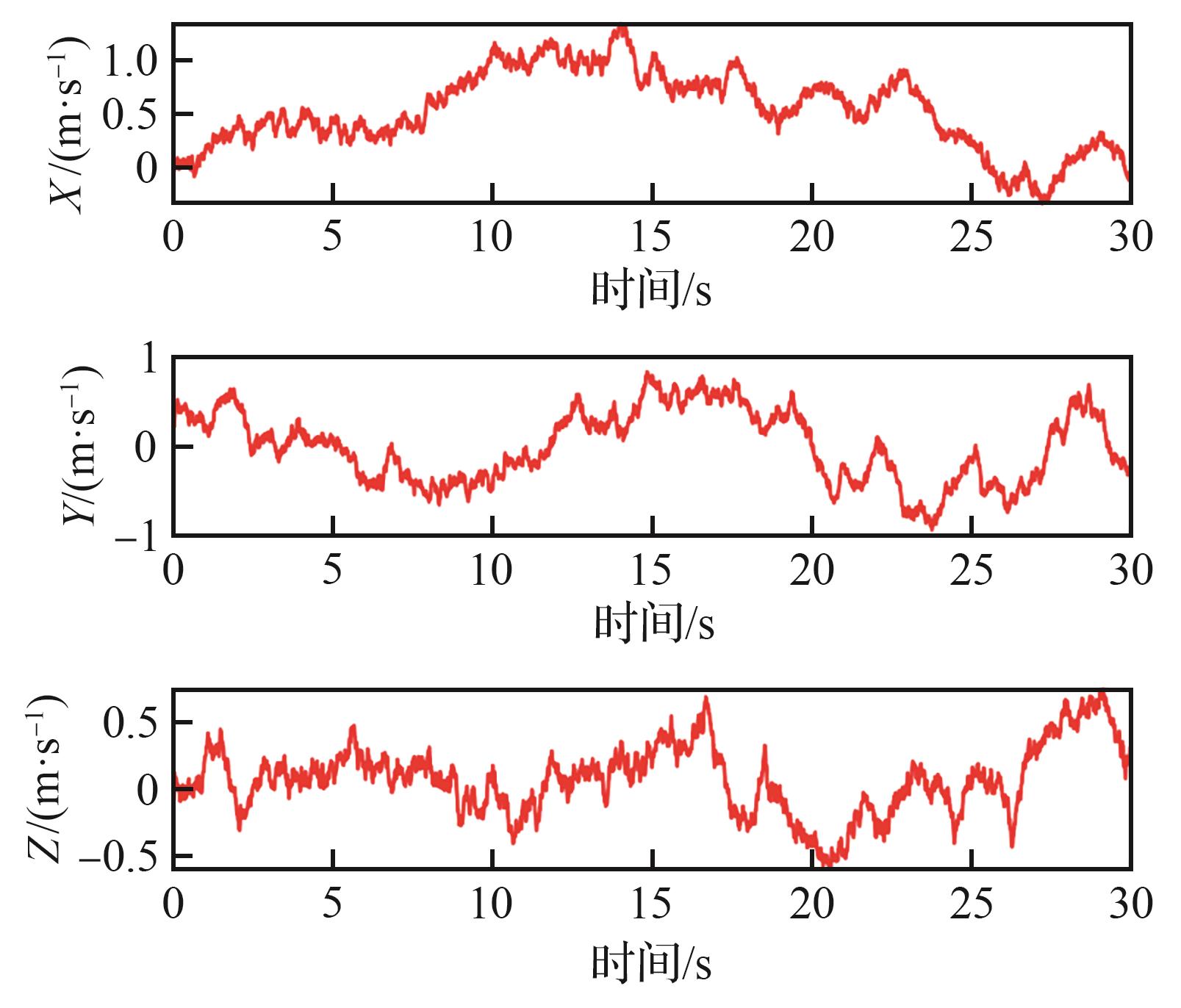

Fig.18
Curves of variation of additional moment and angle rate of rotation during wing rotation process
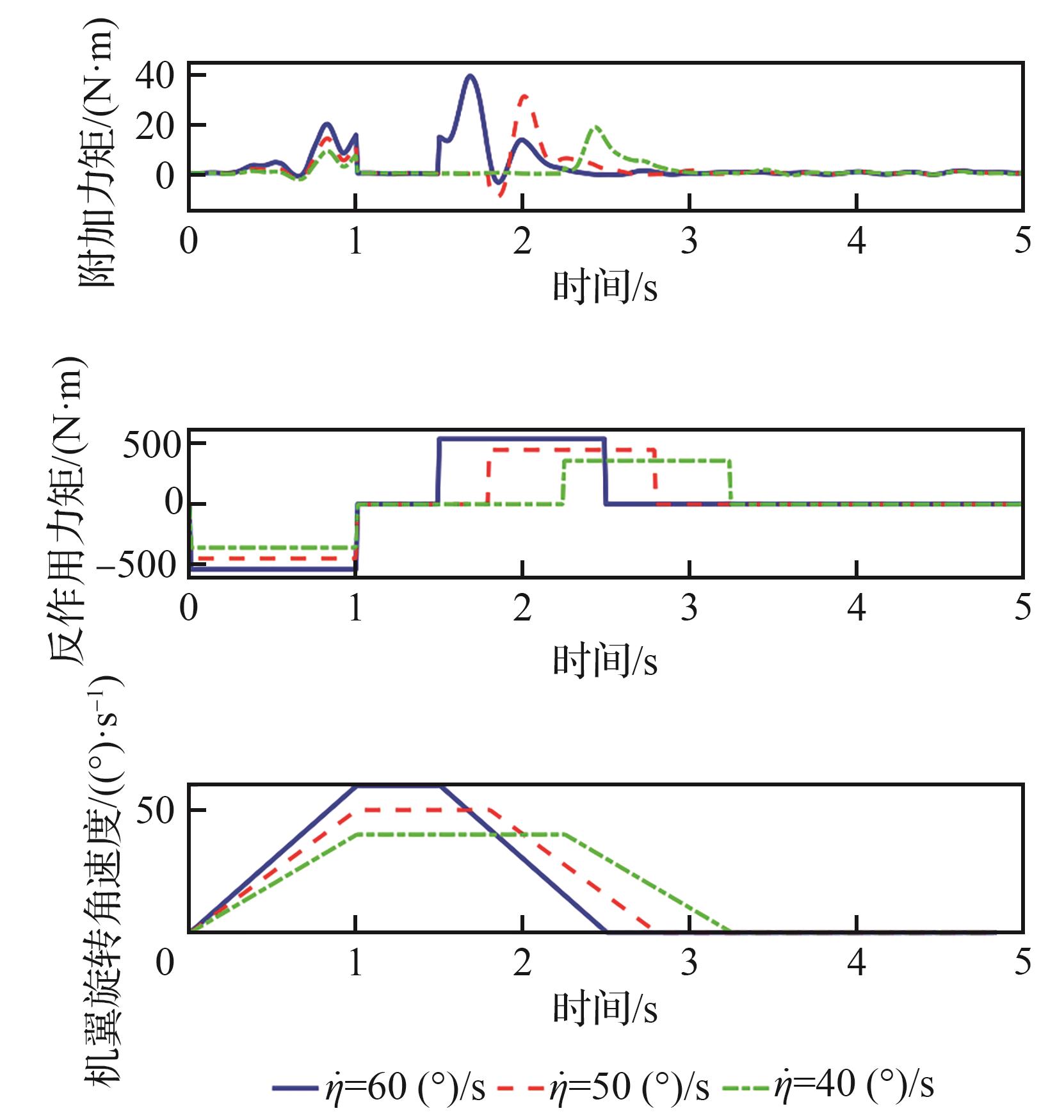
Table 2
Parameters of controllers
| 参数 | 数值 |
|---|---|
| 控制增益 | |
| ESO参数 | |
| TD参数 |
Table 3
Parameters of ATPPC method
| 参数 | 数值 |
|---|---|
| 0.1 | |
| 0.7 | |
| 0.1 |
Fig.19
Curves of grid fin deflection angle for different feedforward compensated targets
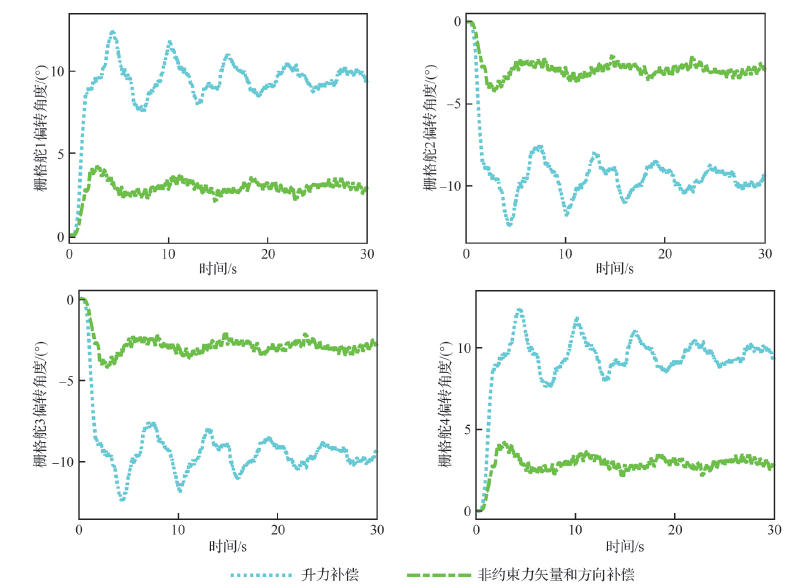
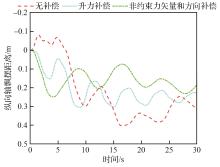
Fig.20
Curves of flight path angle for different feedforward compensated targets
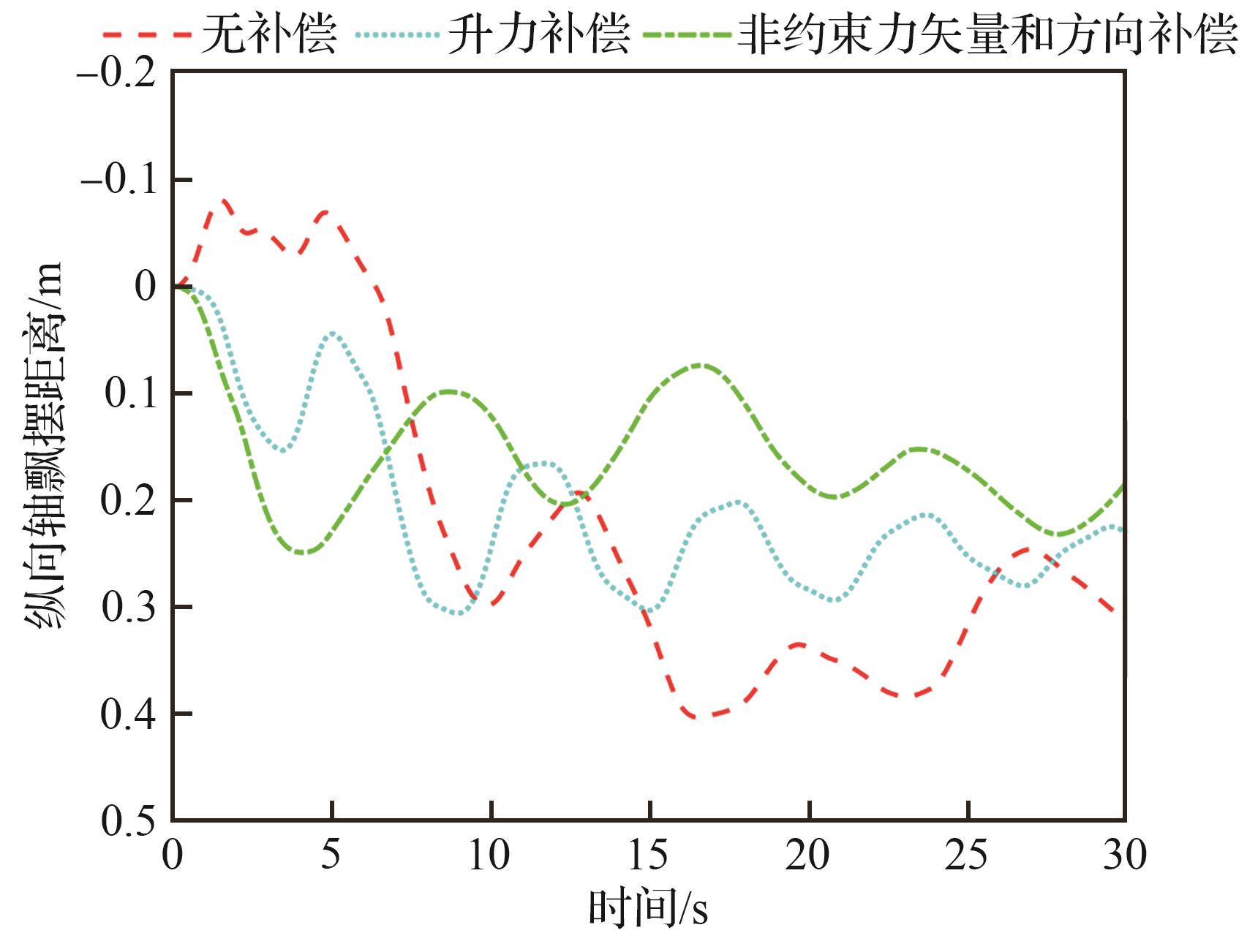
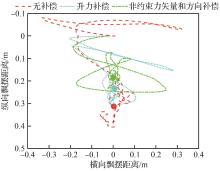
Fig.21
Projection of trajectoryies of drogue-UAV assembly motion on YOZ plane for different feedforward compensated targets
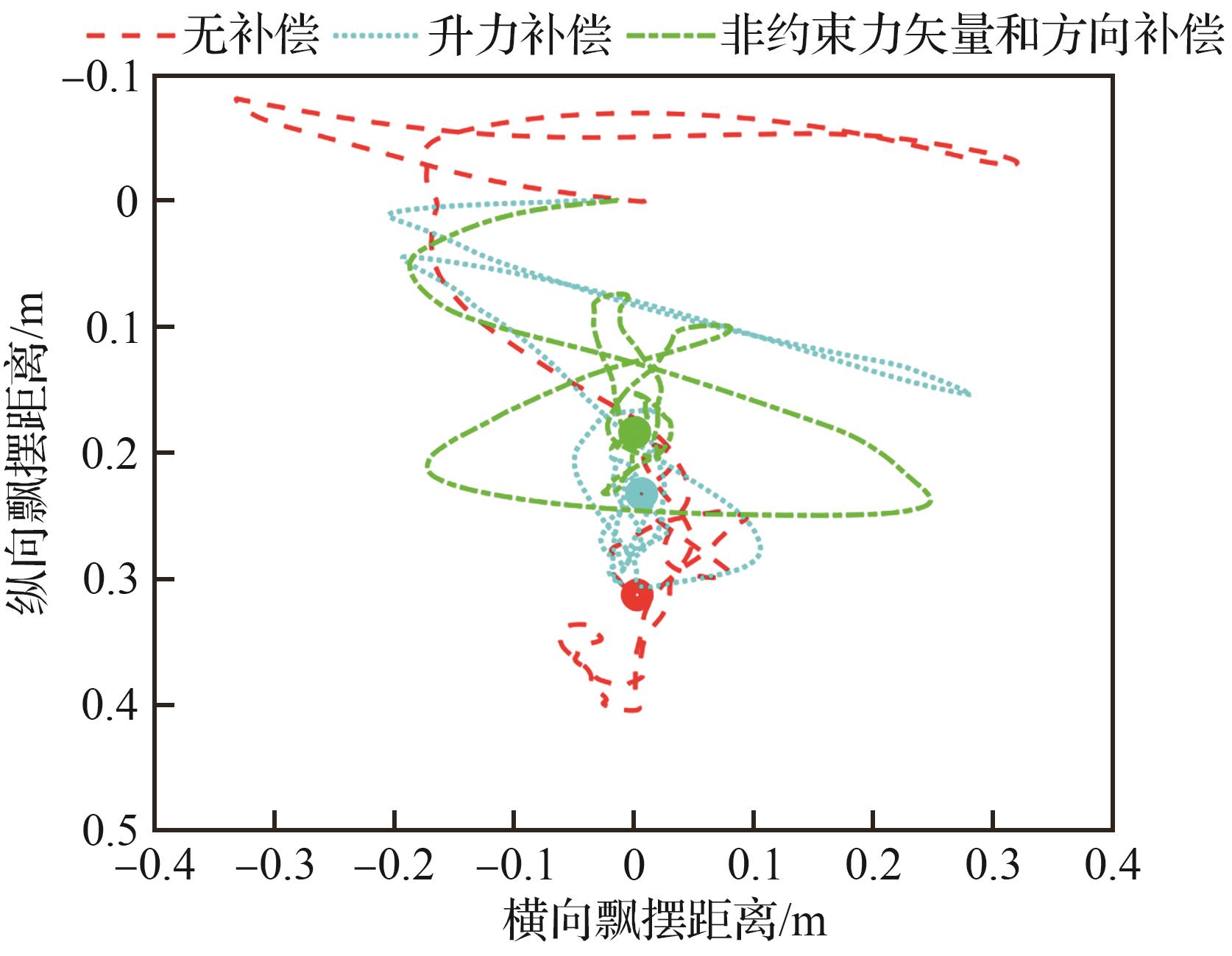
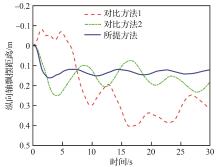
Fig.22
Longitudinal swing distance curves for Simulation Case 1
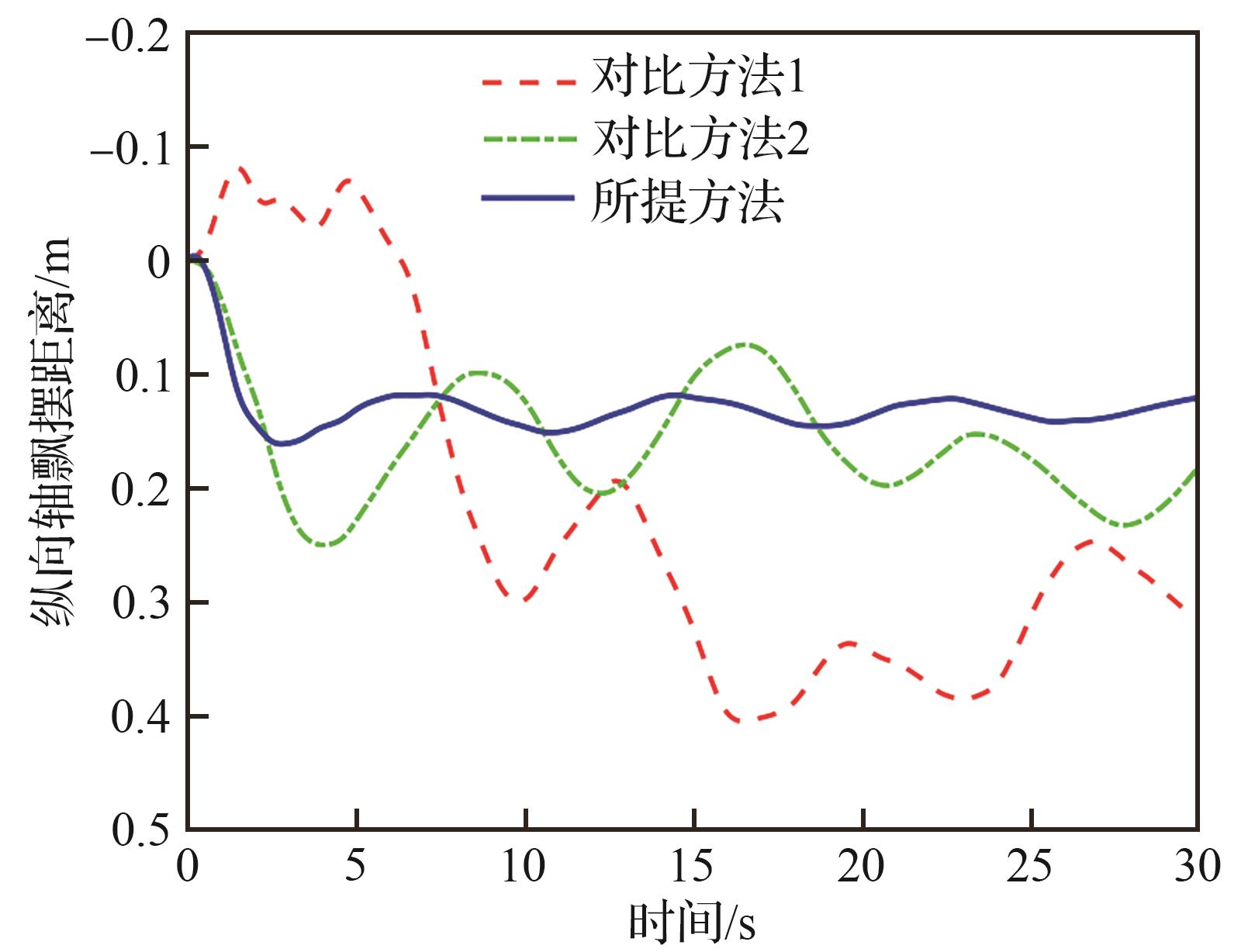
Fig.23
Error constrained boundary and curves of flight path angle for Simulation case 1
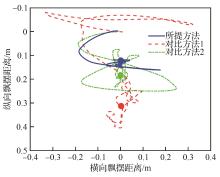
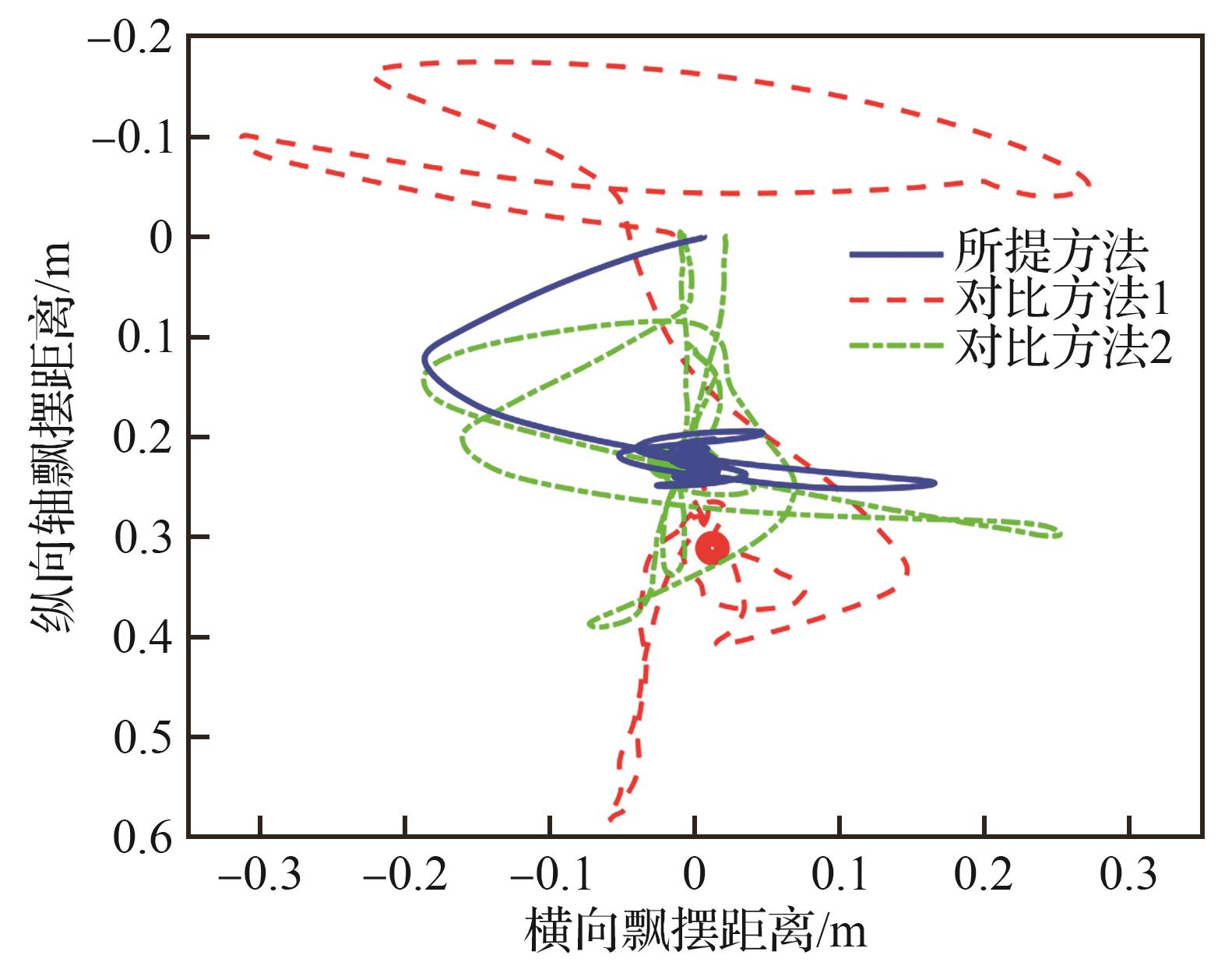
Fig.24
Projection of trajectories of drogue-UAV assembly motion on YOZ plane for Simulation case 1
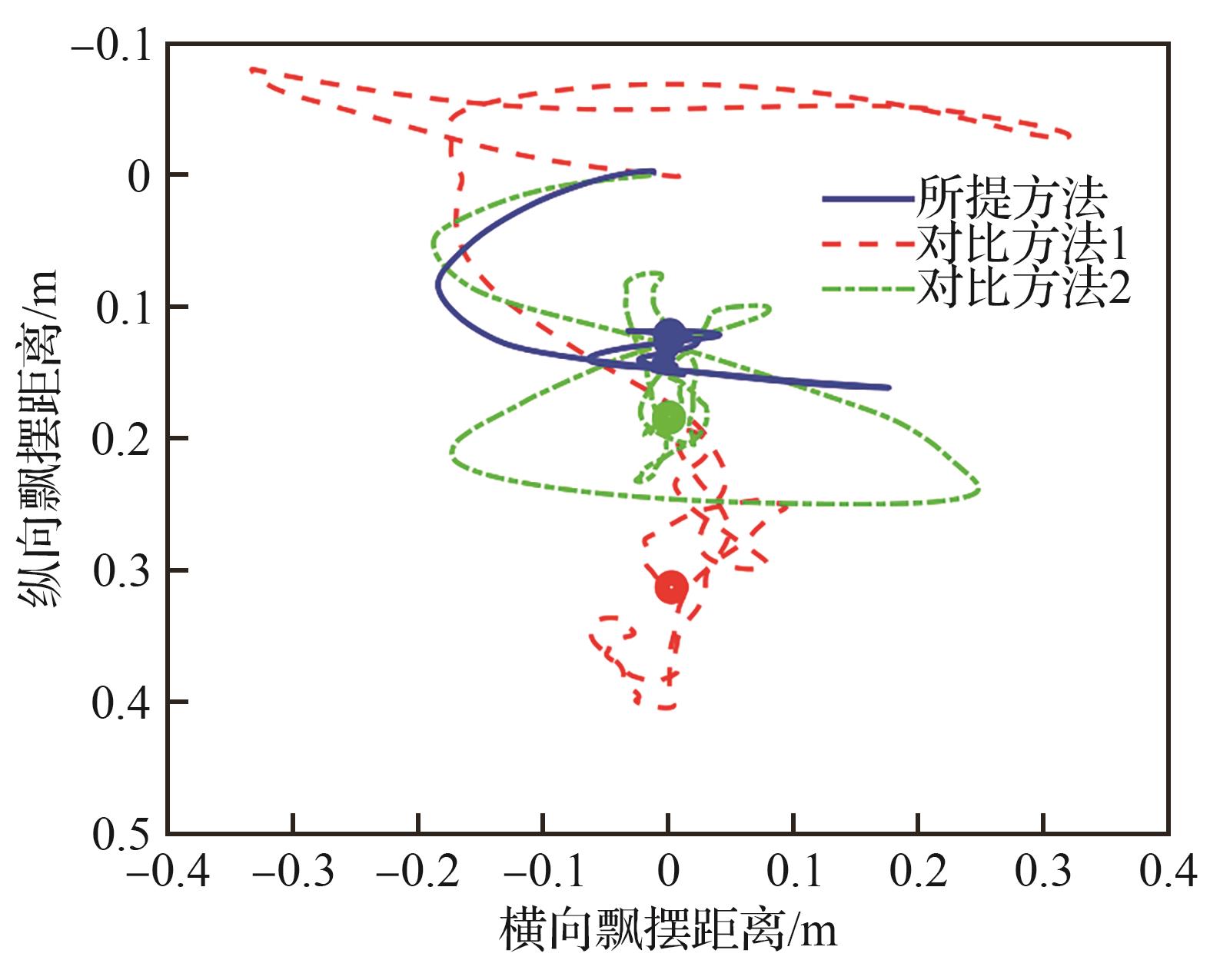
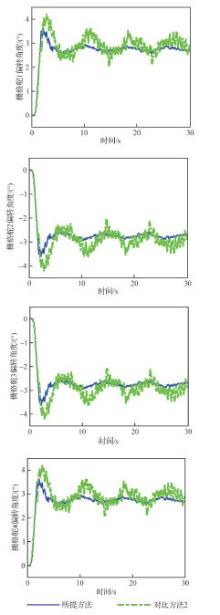
Fig.25
Curves of grid fin deflection angle for Simulation case 1
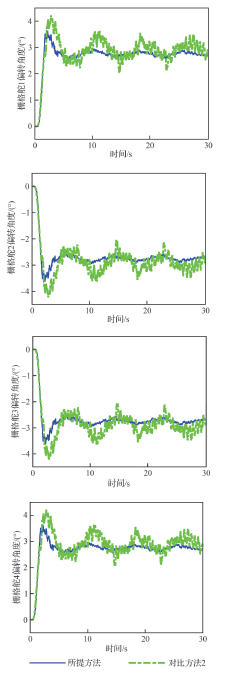
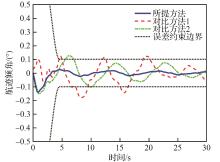
Fig.26
Error constrained boundary and curves of flight path angle for Simulation case 2
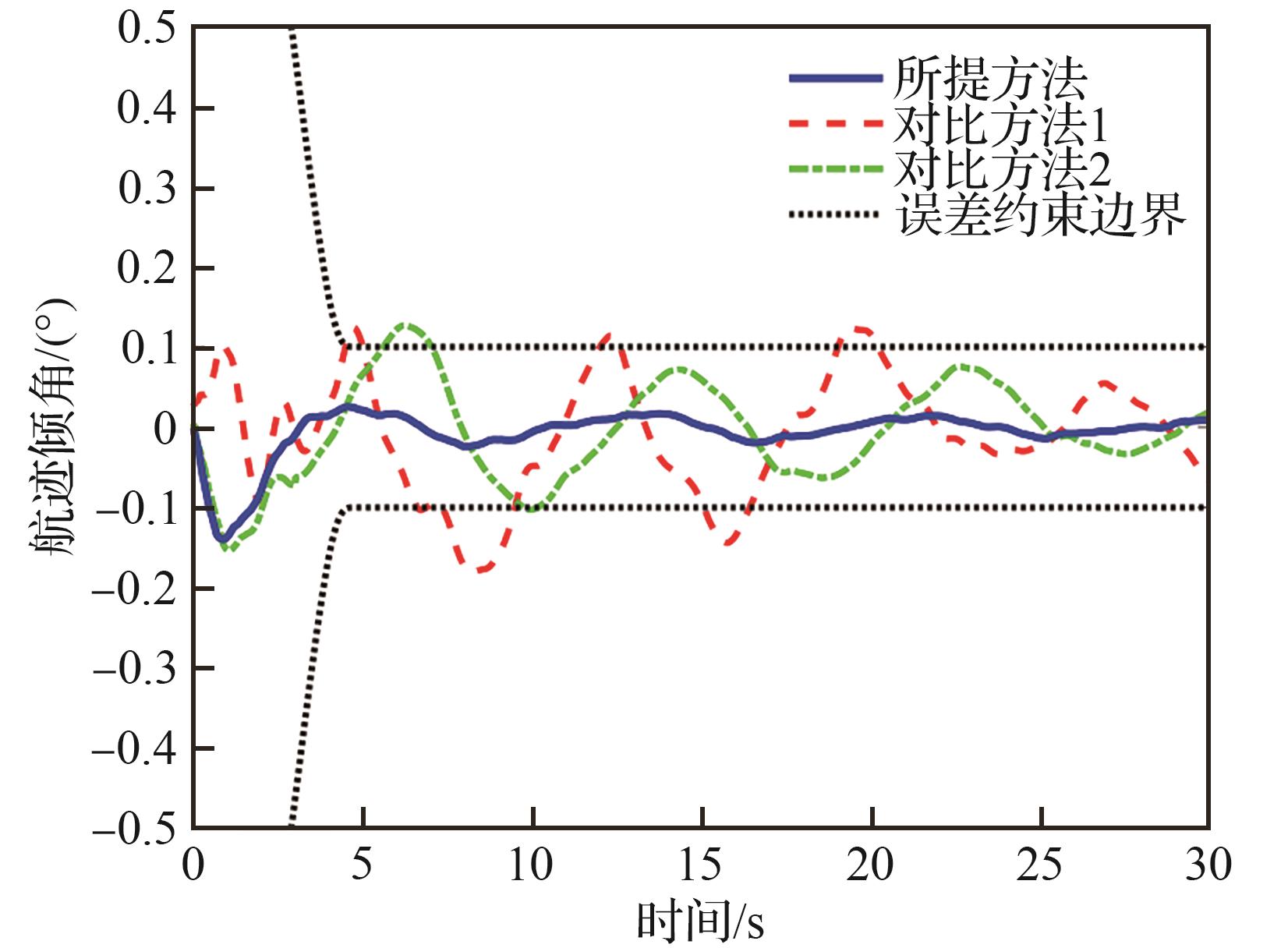
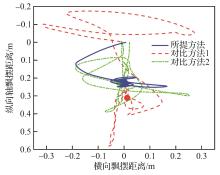
Fig.27
Projection of trajectories of drogue-UAV assembly motion on YOZ plane for Simulation case 2
| [1] | 王宏伦, 王延祥, 刘一恒. 基于轨迹映射的无人机拖曳式空中回收轨迹优化[J]. 航空学报, 2023, 44(20): 628775. |
| WANG H L, WANG Y X, LIU Y H. Recovery trajectory optimization for UAV towed aerial recovery based on trajectory mapping[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628775 (in Chinese). | |
| [2] | 苏子康, 陈海通, 李春涛, 等. 非匹配包线下无人机空基回收拖曳系统协调运动规划[J]. 航空学报, 2023, 44(10): 327377. |
| SU Z K, CHEN H T, LI C T, et al. Coordinating motion planning for towed cable system in UAV aerial recovery with unmatched envelope[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(10): 327377 (in Chinese). | |
| [3] | WANG Y X, WANG H L, LIU B L, et al. A visual navigation framework for the aerial recovery of UAVs[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 5019713. |
| [4] | CHU L L, LI Q, GU F, et al. Design, modeling, and control of morphing aircraft: A review[J]. Chinese Journal of Aeronautics, 2022, 35(5): 220-246. |
| [5] | 杨贯通, 唐胜景, 赵林东, 等. 变后掠变展长飞行器动力学建模与动态响应分析[J]. 兵工学报, 2014, 35(1): 102-107. |
| YANG G T, TANG S J, ZHAO L D, et al. Dynamic modeling and response of a morphing UAV with variable sweep and variable span[J]. Acta Armamentarii, 2014, 35(1): 102-107 (in Chinese). | |
| [6] | 马航, 宋笔锋, 裴扬, 等. 非对称变后掠柔性后缘飞机滚转控制分配研究[J]. 系统工程与电子技术, 2019, 41(5): 1094-1102. |
| MA H, SONG B F, PEI Y, et al. Research on roll control allocation of asymmetric sweep aircraft with flexible trailing edge[J]. Systems Engineering and Electronics, 2019, 41(5): 1094-1102 (in Chinese). | |
| [7] | 李勇, 马绍贤, 贺旭照, 等. 斜置机翼变构飞行器纵向操稳特性分析[J]. 飞行力学, 2024, 42(1): 55-61. |
| LI Y, MA S X, HE X Z, et al. Analysis of longitudinal controllability and stability of oblique wing morphing aircraft[J]. Flight Dynamics, 2024, 42(1): 55-61 (in Chinese). | |
| [8] | 秋路, 高正红, 刘艳. 斜置翼布局飞机的飞行动力学模型研究[J]. 飞行力学, 2015, 33(2): 106-110. |
| QIU L, GAO Z H, LIU Y. Research on oblique wing aircraft’s flight dynamics model[J]. Flight Dynamics, 2015, 33(2): 106-110 (in Chinese). | |
| [9] | LIU Y H, WANG H L, FAN J X, et al. Trajectory stabilization control for aerial recovery of cable-drogue-UAV assembly[J]. Nonlinear Dynamics, 2021, 105(4): 3191-3210. |
| [10] | PARANCHEERIVILAKKATHIL M S, PILAKKADAN J S, AJAJ R M, et al. A review of control strategies used for morphing aircraft applications[J]. Chinese Journal of Aeronautics, 2024, 37(4): 436-463. |
| [11] | DE PONTI T M L, SMEUR E J J, REMES B W D. Incremental nonlinear dynamic inversion controller for a variable skew quad plane[C]∥2023 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2023: 241-248. |
| [12] | 宋慧心, 金磊. 折叠翼飞行器的动力学建模与稳定控制[J]. 力学学报, 2020, 52(6): 1548-1559. |
| SONG H X, JIN L. Dynamic modeling and stability control of folding wing aircraft[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(6): 1548-1559 (in Chinese). | |
| [13] | GONG L G, WANG Q, DONG C Y. Disturbance rejection control of morphing aircraft based on switched nonlinear systems[J]. Nonlinear Dynamics, 2019, 96(2): 975-995. |
| [14] | TONG L, JI H. Multi-body dynamic modelling and flight control for an asymmetric variable sweep morphing UAV[J]. The Aeronautical Journal, 2014, 118(1204): 683-706. |
| [15] | 徐悦, 韩忠华, 尤延铖, 等. 新一代绿色超声速民机的发展现状与挑战[J]. 科学通报, 2020, 65(S 1): 127-133. |
| XU Y, HAN Z H, YOU Y C, et al. Development status and challenges of a new generation of green supersonic civil aircraft[J]. Chinese Science Bulletin, 2020, 65(S 1): 127-133. | |
| [16] | 甘文彪, 左振杰, 向锦武, 等. 飞行器旋转翼折展过程动稳定性研究进展[J]. 北京航空航天大学学报, 2024, 50(4): 1053-1064. |
| GAN W B, ZUO Z J, XIANG J W, et al. Research progress on dynamic stability of rotating variant wing opening and closing process for aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(4): 1053-1064 (in Chinese). | |
| [17] | 曹承钰, 李繁飙, 廖宇新, 等. 高超声速变外形飞行器建模与固定时间预设性能控制[J]. 自动化学报, 2024, 50(3): 486-504. |
| CAO C Y, LI F B, LIAO Y X, et al. Modeling and fixed-time prescribed performance control for hypersonic morphing vehicle[J]. Acta Automatica Sinica, 2024, 50(3): 486-504 (in Chinese). | |
| [18] | WANG Y X, WANG H L, LIU Y H, et al. Performance-guaranteed neuroadaptive docking control for UAV aerial recovery under carrier maneuvering flight[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8355-8368. |
| [19] | 苏子康, 陈嘉, 李雪兵, 等. 四倾转旋翼无人机过渡飞行位姿协调控制[J/OL]. 北京航空航天大学学报, (2024-01-18)[2025-01-23]. . |
| SU Z K, CHEN J, LI X B, et al. Coordinated control of transition flight position and attitude for quad tilt-rotor UAV[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, (2024-01-18)[2025-01-23]. (in Chinese). | |
| [20] | HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| [21] | CARTER R, KEETER T M, CALHOUN P. Airborne recovery of the X-61A gremlin unmanned aircraft: AIAA-2024-0570[R]. Reston: AIAA, 2024. |
| [1] | Yiquan WU, Kang TONG. Research advances on deep learning-based small object detection in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(3): 30848-030848. |
| [2] | Yicheng SONG, Ruiyun QI, Bin JIANG. Distributed topology reconstruction of UAV formation network under communication fault [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(22): 331914-331914. |
| [3] | Jiang ZHAO, Minghao PI, Bailing TIAN, Pei CHI, Yingxun WANG. Self-organized consensus decision-making method for swarm UAV tracking multiple targets [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331635-331635. |
| [4] | Fang LIU, Chenyang LU, Yan LU, Xin WANG. Adaptive template update-based Transformer algorithm for UAV target tracking [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(16): 331687-331687. |
| [5] | Haijun ZHANG, Qingyue XIA, Xu MA, Chao REN, Yang LU. A review of unmanned aerial vehicles deployment optimization in 6G low-altitude communication scenarios [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531296-531296. |
| [6] | Wenxiao HU, Di MU, Zhi LI, Yingyi GUO, Xinmin CHEN. Key technical issues and innovation strategies for development of low-altitude economy [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531539-531539. |
| [7] | Xudong LUO, Yiquan WU, Jinlin CHEN. Research progress on deep learning methods for object detection and semantic segmentation in UAV aerial images [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 28822-028822. |
| [8] | Gaojie ZHENG, Xiaoming HE, Dongpo LI, Huijun TAN, Kun WANG, Zhenlong WU, Depeng WANG. Double 90° deflection inlet/volute coupling flow characteristics of tail-powered unmanned aerial vehicle [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 128782-128782. |
| [9] | Jiang ZHAO, Xuan ZHANG, Pei CHI, Yingxun WANG. Self⁃adaptive formation control and dynamic path planning for air⁃ground heterogeneous swarm [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(16): 329809-329809. |
| [10] | Zhaochen CHU, Tao SONG, Ren JIN, Defu LIN. Vision-based air-to-air multi-UAVs tracking [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 629379-629379. |
| [11] | Hui LI, Jianfei GU, Jinan LI, Zhanbin SUN, Kaihua SUN, Xiaochuan LIU, Xin WANG, Bingjie ZHANG, Xiangping WANG, Hui MA. Dynamics modeling and validation of L-shaped pipeline in aero-engine under multi-source excitations [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 229375-229375. |
| [12] | Ming LIU, Ruichao FAN, Shi QIU, Xibin CAO. Spacecraft attitude-orbit prescribed performance control based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628313-628313. |
| [13] | Guangquan DUAN, Guoping LIU. Adaptive prescribed control of position and attitude of combined spacecraft based on fully actuated system approach [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628837-628837. |
| [14] | Zeyang YIN, Youpeng XING, Fei HAN, Caisheng WEI, Yuxin LIAO. Fully-actuated prescribed performance control of spacecraft formation for flying cooperatively around non-cooperative target [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628904-628904. |
| [15] | Kunda LIU, Xueming LIU, Bo ZHU, Qingrui ZHANG. Robust safe control for multi⁃UAV formation flight through narrow corridors [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 729768-729768. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341